
Projekt z laboratorium Sterowania
Dyskretnego
temat nr 20
Tatar
Radosław
gr.
Rok IIIC - AiR IMIR
1. Opis zadania:
a) Zaprojektować układ regulacji położenia windy napędzanej obcowzbudnym silnikiem
prądu stałego o zadanych parametrach, uwzględniając ograniczenia prędkości i
przyspieszenia windy. Należy zaprojektować trzy różne algorytmy sterowania, PID –
regulator referencyjny oraz do wyboru: regulator deadbeat, regulator
czasooptymalny, regulator LQR, układ odporny, regulator rozmyty.
b) dane do tematu:
L=0.2[H]
R=0.1[Ω]
J=0.1[kg*m^2/s^2]
D=1[N*m*s/rad]
km=2[N*m/A]
ke=2[V*s/rad]
P=400[W]
r=0.3[m]
m=550[kg]
B=10[N*s/m]
k=600000[N/m]
g=9.81[m/s^2]
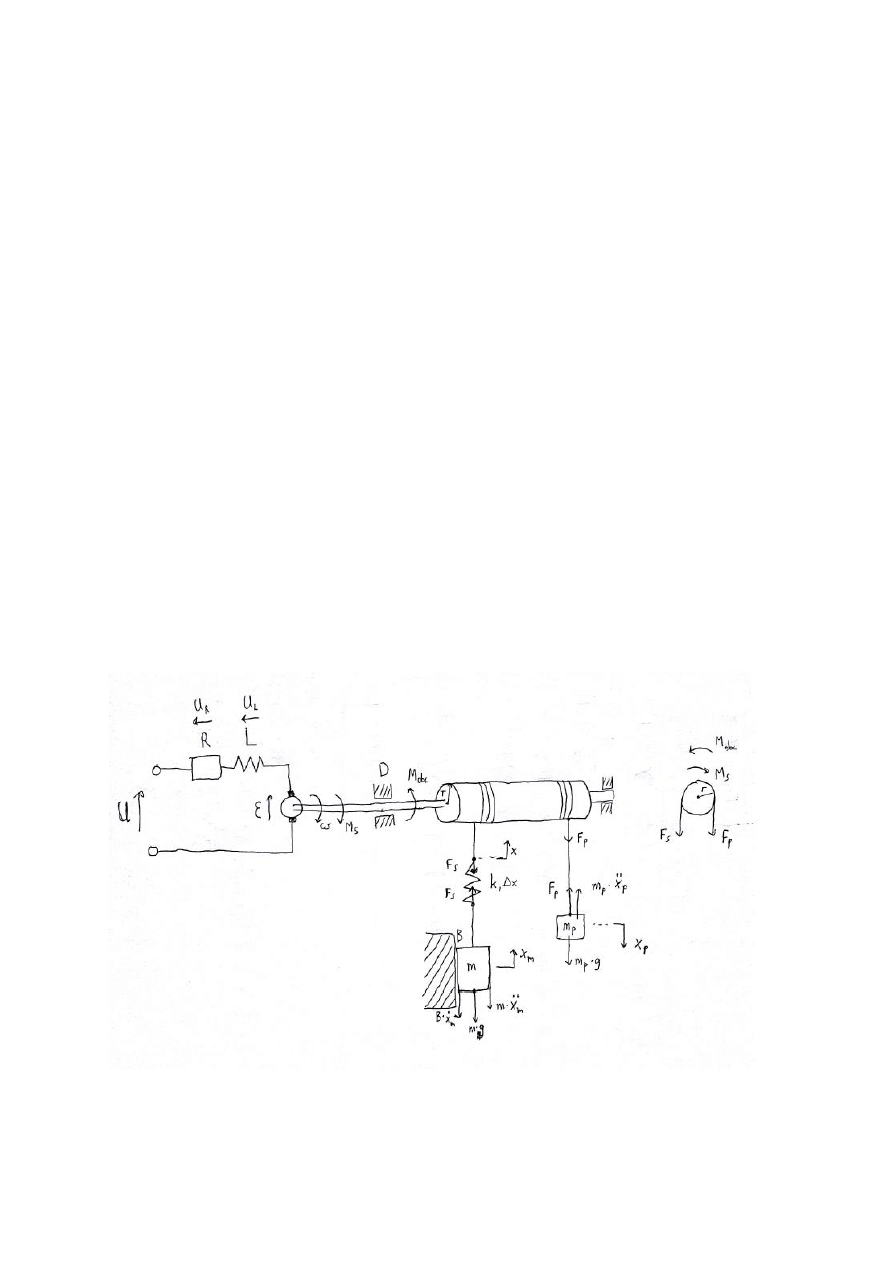
c) schemat modelu:
rys. 1. schemat układu fizycznego.
Zdecydowaliśmy się zastosować model windy z kompensacją ciężaru przeciwwagą.
2. Realizacja:
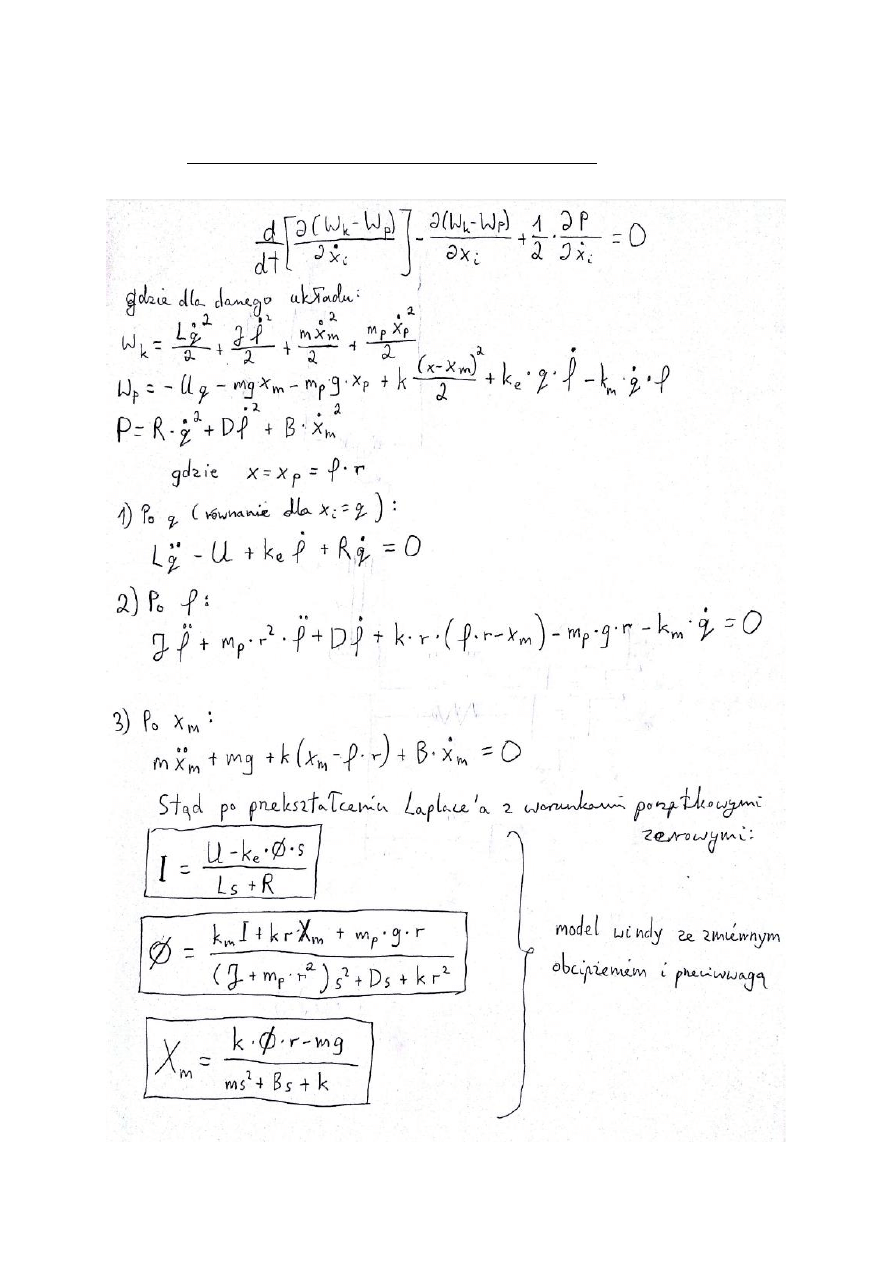
1) Wyprowadzenie modelu z równania Lagrange’a:
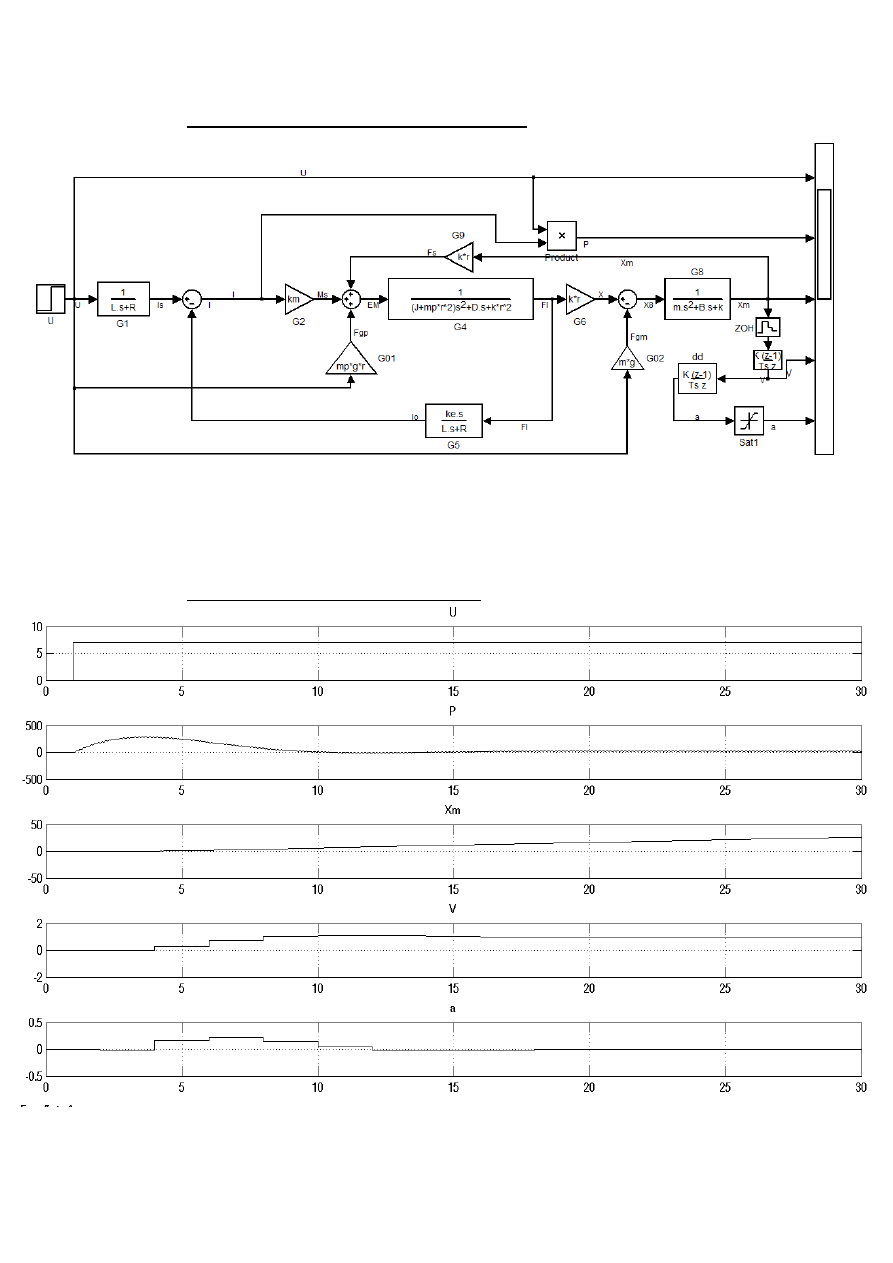
2) Model windy zrealizowany w Simulinku:
rys.2. cały model
3) Odpowiedź skokowa tego modelu:
rys. 3. Zachowanie modelu.
4) Wyprowadzenie transmitancji modelu:
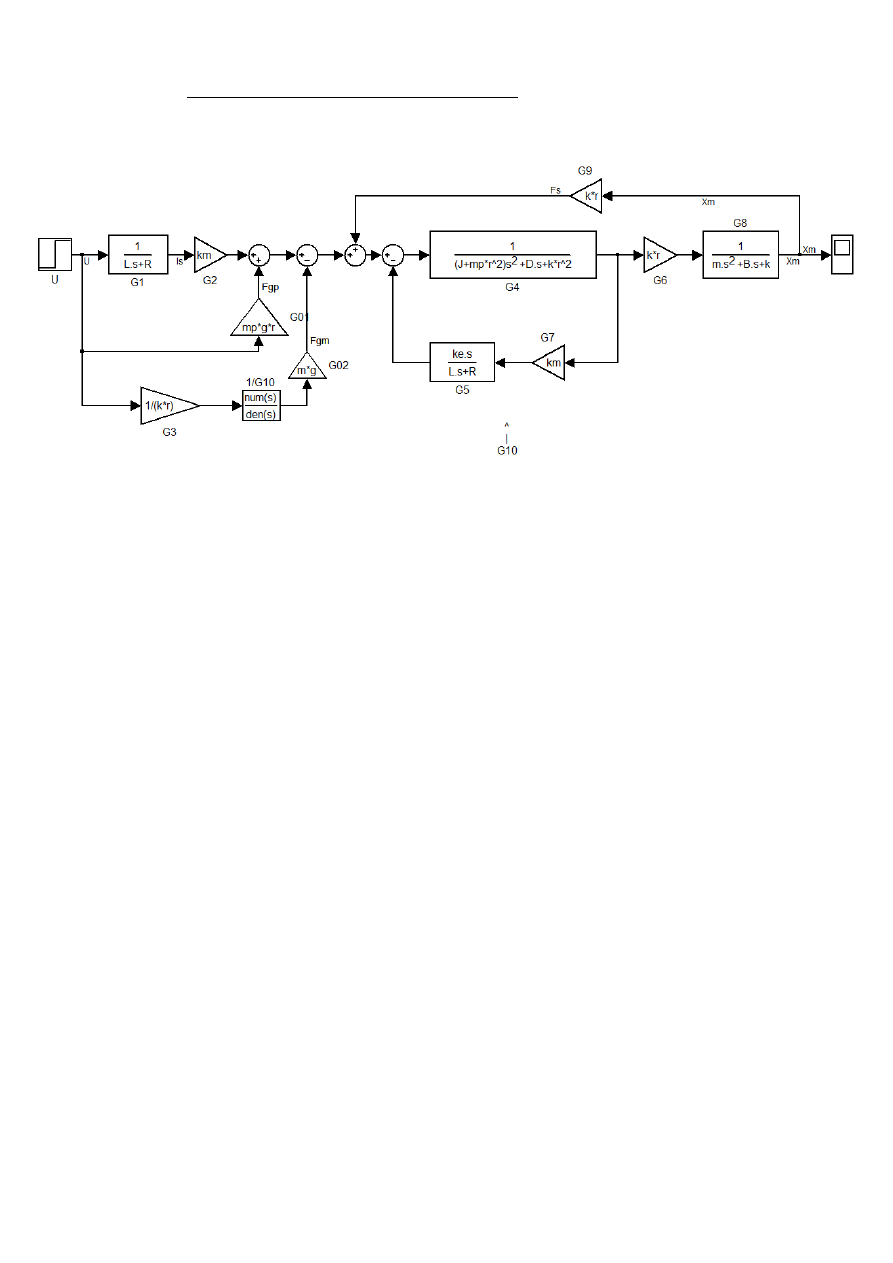
a) Zredukowaliśmy model blokowy:
rys. 4. schemat zredukowany.
b) w Matlabie obliczyliśmy transmitację ciągłą i dyskretną:
G1=tf(1,[L R]);
G2=tf(km,1);
G01=tf(mp*g*r,1);
G4=tf(1,[J+mp*r^2 D
k*r^2]);
G5=tf([ke 0],[L R]);
G6=tf(k*r,1);
G02=tf(m*g,1);
G8=tf(1,[m B k]);
G9=tf(k*r,1);
G09=series(G5,G2);
G10=feedback(G4,G09);
G03=series(G10,G6);
G11=series(G03,G8);
G12=feedback(G11,G9,+1);
G14=series(G1,G2);
G13=parallel(G01,G14);
G04=series(G6,G10);
G15=series(-G02,G04^-1);
G16=parallel(G13,G15);
Gc=series(G16,G12)
[Lc,Mc]=tfdata(Gc,
'v'
);
Tp=0.01
[Ld,Md]=c2dm(Lc,Mc,Tp,
'zoh'
)
tf(Ld,Md,Tp)
Ich postacie to:
-ciągła:
-3.854e008 s^5 - 5.858e008 s^4 - 4.561e008 s^3 + 2.383e009 s^2 + 2.552e009 s + 6.48e008
-----------------------------------------------------------------------------------------------------------
3.928e007 s^7 + 6.043e007 s^6 + 8.567e010 s^5 + 1.301e011 s^4 + 8.396e010 s^3 + 2.921e010 s^2 + 4.525e009 s
-dyskretna:
-0.0004816 z^6 + 0.001919 z^5 - 0.002386 z^4 - 1.424e-005 z^3 + 0.002393 z^2 - 0.001905 z + 0.0004743
-----------------------------------------------------------------------------------------------------
z^7 - 6.771 z^6 + 19.84 z^5 - 32.64 z^4 + 32.57 z^3 - 19.71 z^2 + 6.698 z - 0.9847
5) Wyznaczenie parametrów regulatora PID:
a) Najpierw doprowadziliśmy układ do niegasnących oscylacji, wyznaczając K
kr
oraz T
osc
:
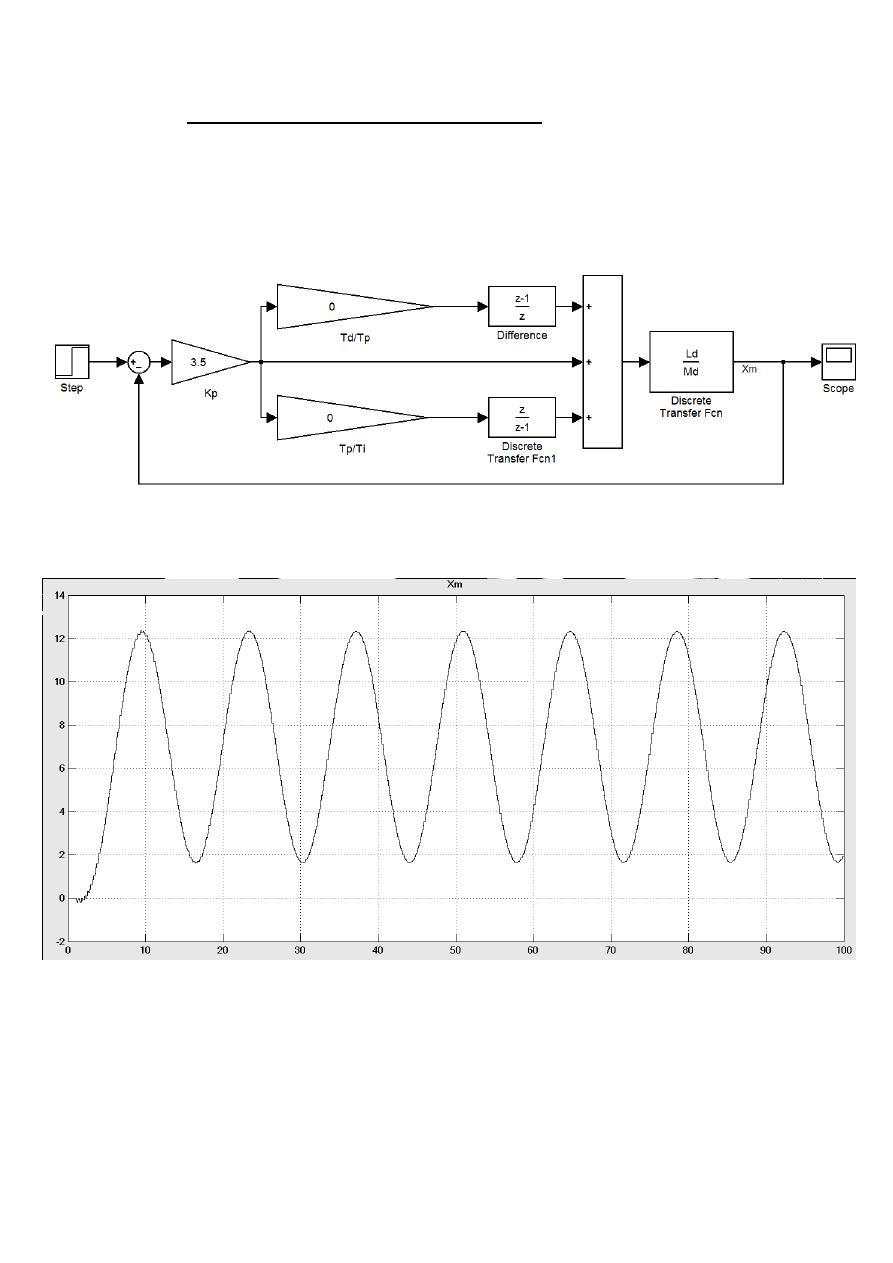
rys. 5. schemat dyskretnego PID.
rys.6. Niegasnące oscylacje w odpowiedzi skokowej dyskretnego PID
Odczytaliśmy:
K
kr
= 3.5
T
osc
= 13.85s
Przyjęliśmy czas próbkowania T
p
= 0,01s, był to czas w którym odpowiedź dyskretna nie odbiegała
jeszcze bardzo od ciągłej.
Stąd obliczyliśmy na podstawie tabeli doboru nastaw metodą Zieglera-Nicholsa:
K
p
= 0,6*K
kr
= 2.1
T
p
/T
i
= 1/(0,5*(T
osc
/T
p
-1)) = 0.0015
T
d
/T
p
= 0.125*(T
osc
/T
p
)^2/(T
osc
/T
p
-1) =173.3
Niestety okazuje się, iż obliczone parametry nie pozwalają uzyskać stabilności, układ traci stabilność.
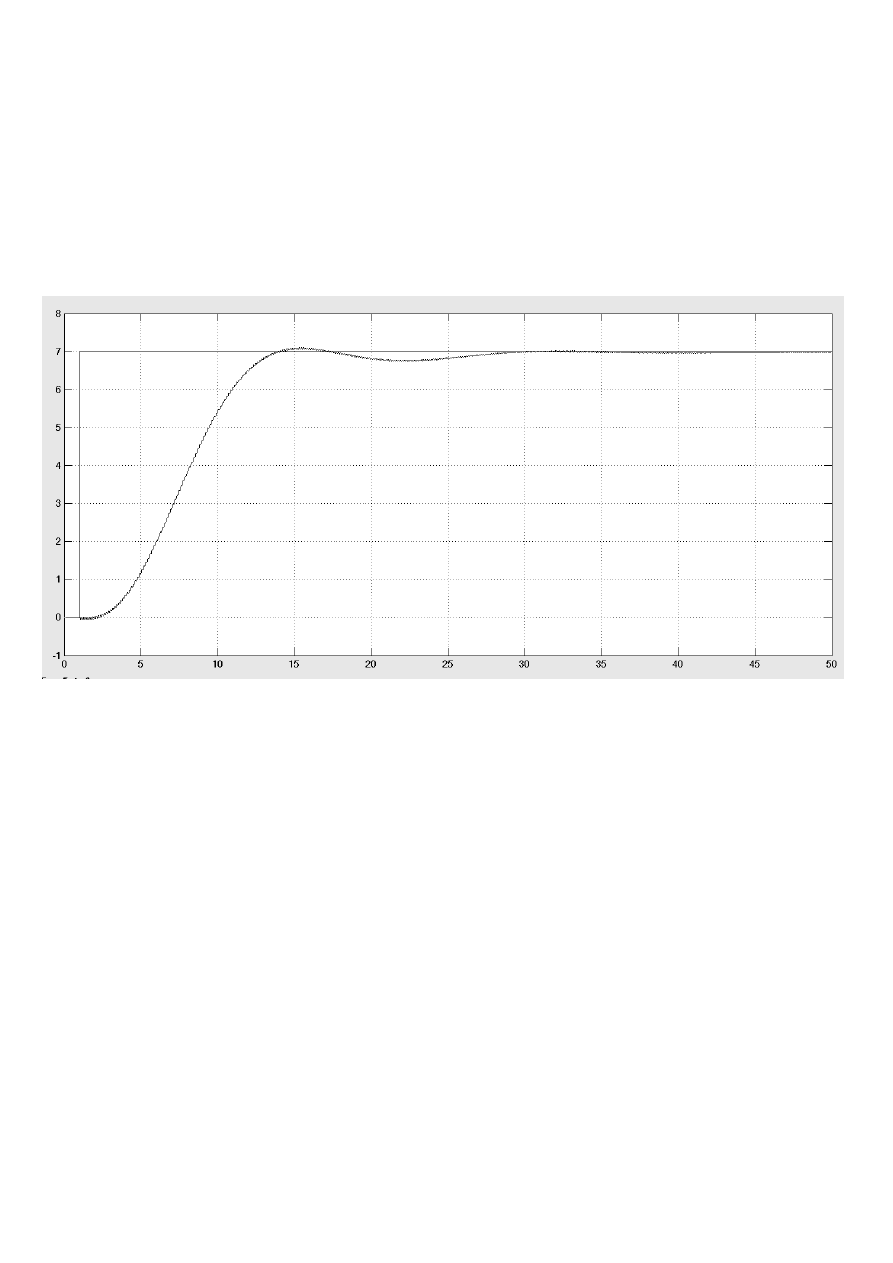
Dla porównania prezentuję wykres regulatora P dla K
p
= 1:
rys. 8. Odpowiedź skokowa układu regulacji z regulatorem dyskretnym P.
3. Modele pozostałych regulatorów:
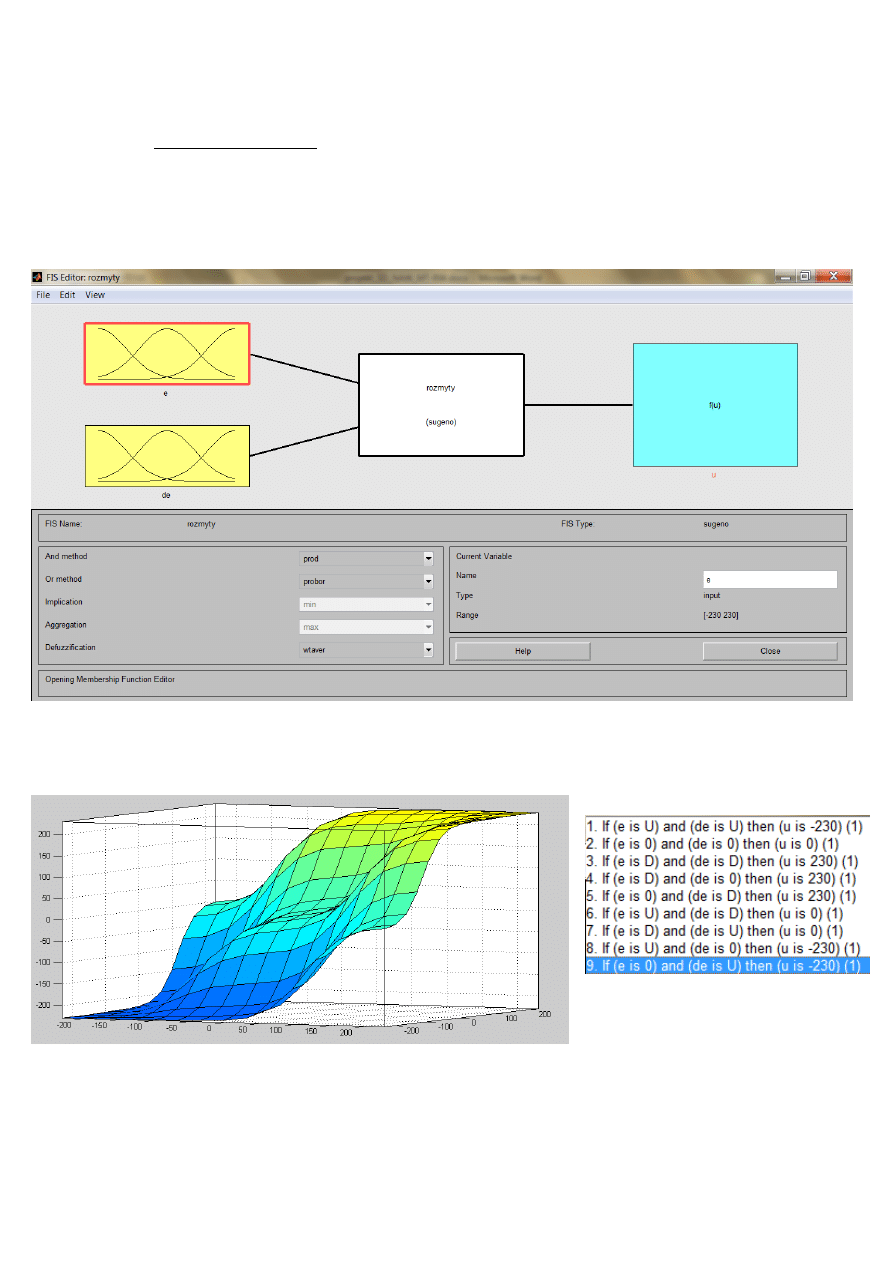
1) Regulator rozmyty:
Regulator rozmyty sporządziliśmy za pomocą narzędzia Matlaba Fuzzy Logic, w modelu Sugeno,
definiując proste 9 reguł.
rys. 9. Widok menu modelu Sugeno.
rys. 10. Widok powierzchni(z lewej) utworzonej z reguł (z prawej),
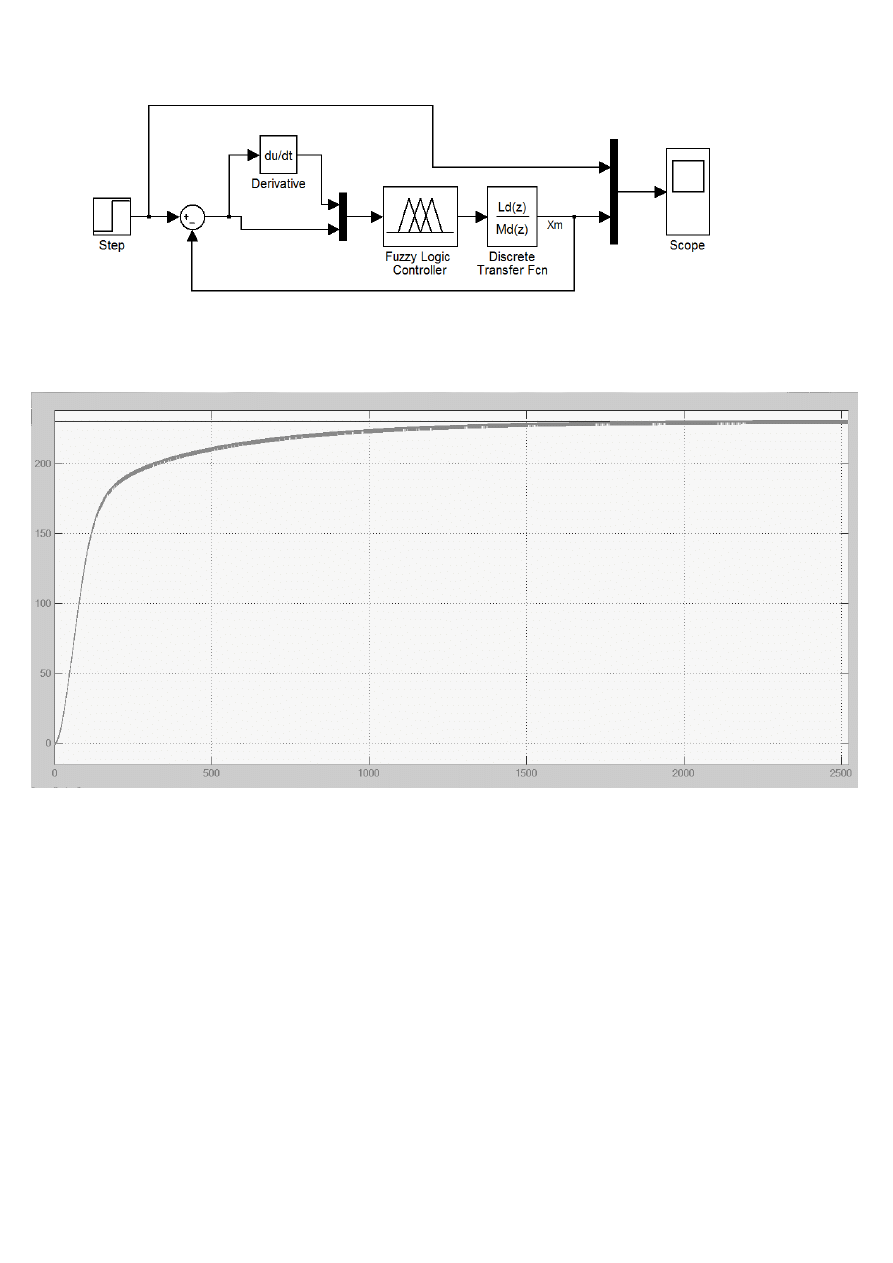
rys. 11. Schemat regulacji rozmytej w simulinku.
rys.12. Odpowiedź skokowa dyskretnego układu regulacji z regulatorem rozmytym
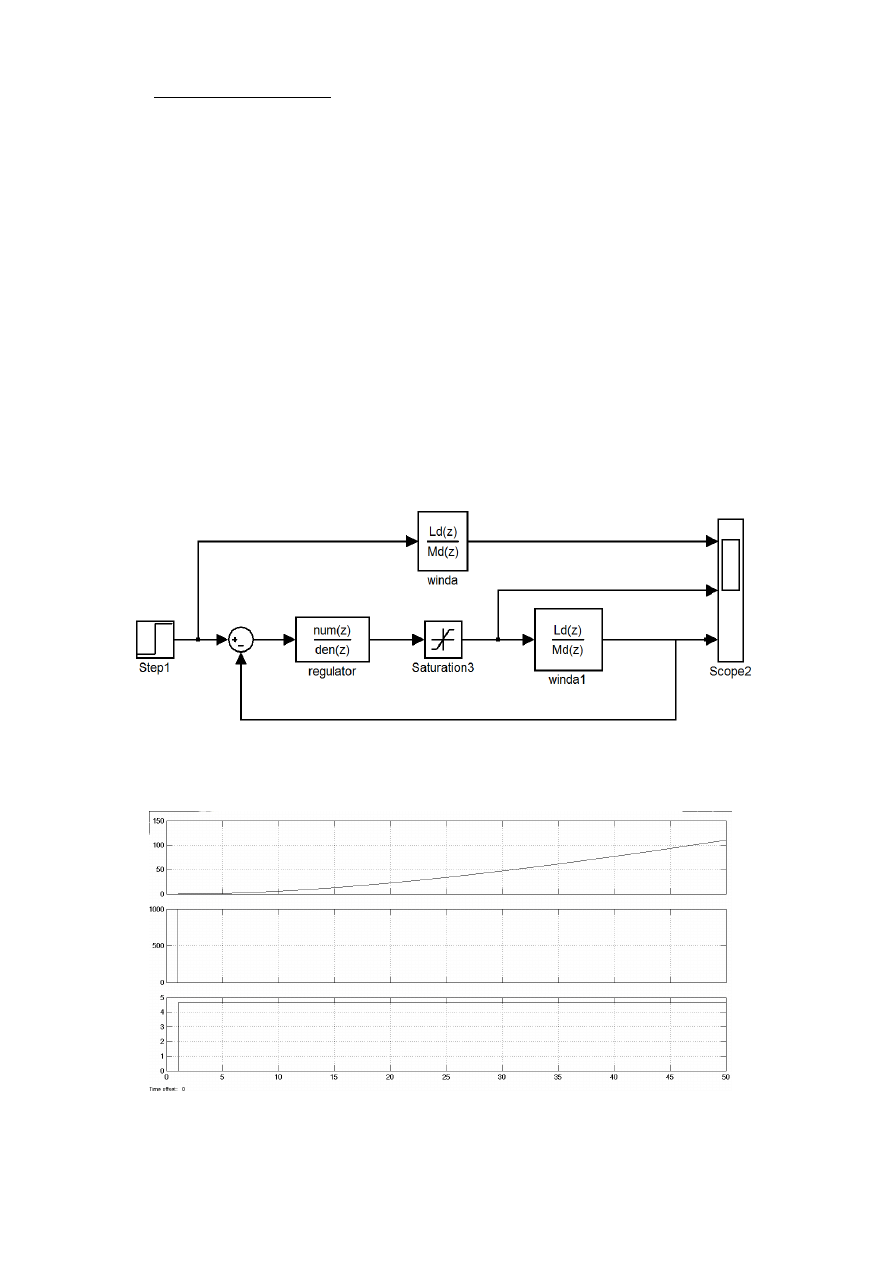
2) Regulator Deadbeat:
a) implementacja w m-pliku:
tf(Ld,Md,Tp,'Variable','z^-1')
a1=Md(2)
a2=Md(3)
a3=Md(4)
a4=Md(5)
a5=Md(6)
a6=Md(7)
a7=Md(8)
b1=Ld(2)
b2=Ld(3)
b3=Ld(4)
b4=Ld(5)
b5=Ld(6)
b6=Ld(7)
b7=Ld(8)
a) model w simulinku:
q0=1/(b1+b2+b3+b4+b5+b6+b7)
q1=a1*q0
q2=a2*q0
q3=a3*q0
q4=a4*q0
q5=a5*q0
q6=a6*q0
q7=a7*q0
p1=b1*q0
p2=b2*q0
p3=b3*q0
p4=b4*q0
p5=b5*q0
p6=b6*q0
p7=b7*q0
rys.13. model regulatora deadbeat w simulinku.
rys.14. odpowiedzi skokowe układu regulacji opartego na regulatorze deadbeat(od góry kolejno
X,V,a).

4. Podsumowanie:
W projekcie sporym wyzwaniem okazało się poprawne zamodelowanie układu oraz poprawne
przekształcenie transmitancji na postać dyskretną.
Przedstawiony model generuje, zgodne z oczekiwaniami charakterystyki.
Prawidłowe wykonanie projektu wynikło z niemożności zastosowania metody Zieglera-Nicholsa
w celu dobrania nastaw regulatora PID z nieznanego powodu.
Regulator P posłużył nam za regulator odniesienia z powodu braku możliwości dobrania nastaw
regulatora PID.
Pierwszy z porównywanych regulatorów to regulator rozmyty. W naszym dyskretnym przypadku
odpowiedź układu regulowanego charakteryzuje się brakiem przeregulowania, który uzyskaliśmy
kosztem czasu regulacji.
Drugi regulator, regulator Deadbeat nie daje prawidłowej odpowiedzi, możliwe że z tego samego
powodu co regulator PID.
Z badań wnioskujemy, że implementacja regulatora rozmytego w gotowym narzędziu Matlaba
jest dużo łatwiejsza niż dobór optymalnych nastaw regulatora PID. Dzięki regulatorowi rozmytemu
uzyskaliśmy odpowiedź bez przeregulowania, ale jednak z długim czasem regulacji.
Wyszukiwarka
Podobne podstrony:
cwilab 0, AGH WIMIR AiR, Semestr 5, Sterowanie dyskretne, projekt SD NAW, teoria, transmitancje
spr lab2 PA, AGH WIMIR AiR, Semestr 5, Sterowanie dyskretne, projekt SD NAW, z zajec, sprawko lab2 P
Projekt sd
projekt, Wykres W, skala sd
projekt v2 1
PROJEKT 3 v2
Projekt Podstawowe prawa i?finicje elektrotechniki v2 7b Final
sd 2 projekt zalacznik 1
MT projekt 1
projekt tbm johny1 kt, studja, 5 semestr, 3 rok, tbm - projekty, od Jaro, TBM2, Johny-projekt TBM v2
mt wilga 4 ce gotowy projekt domu
MT projekt 1
z6 p mt 1 wzor strony tytulowej pracy, Studia, SEMESTR 7, PI, projekt inżynierski wskazówki
2. V-255MS-MT, Studia, Projekt - materialy konstrukcyjne, 18. Zawory kulowe Zaporowe
Projektowa v2
projekt rozporzadzenia szkolenia 15.12.08 v2
projekt mt id 399102 Nieznany
więcej podobnych podstron