Zadanie 1. Z platformą manipulatora równoległego związany jest układ π
1
, natomiast
układ π
0
związany jest z podstawą. W danej chwili usytułowanie układu π
1
względem π
0
opisuje
wektor r
(0)
01
i kąt obrotu względnego α. Na platformę działa siła F przechodząca przez początek
układu π
1
oraz moment M . Manipulator nie porusza się. Obciążenie zewnętrzne równoważone
jest przez siły napędowe, każda wynosi τ = 100 N. Obliczyć moment M .
x
0
y
0
x
1
y
1
α
B
C
M
F
r
C
r
B
s
P
P
r
(0)
01
= [4 2]
>
r
(0)
B
= [8 2]
>
r
(0)
C
= [4 4]
>
s
(1)
P
= [5 0]
>
sin α = 0.8
cos α = 0.6
Zadanie 2. Uwaga moment oznaczony J
(0)
P
wyznaczony został dla układu współrzędnych
o początku w punkcie P. Obliczyć energię kinetyczną członu wirującego z prędkością kątową ω
p
q
p
q
A
B
C
ω
x
0
y
0
ω = [−1 2 0]
>
p = 2
q = 1
m
A
= m
B
= 120
J
(0)
A
= J
(0)
B
= diag(40,4,40)
J
(0)
C
= diag(8,80,80)
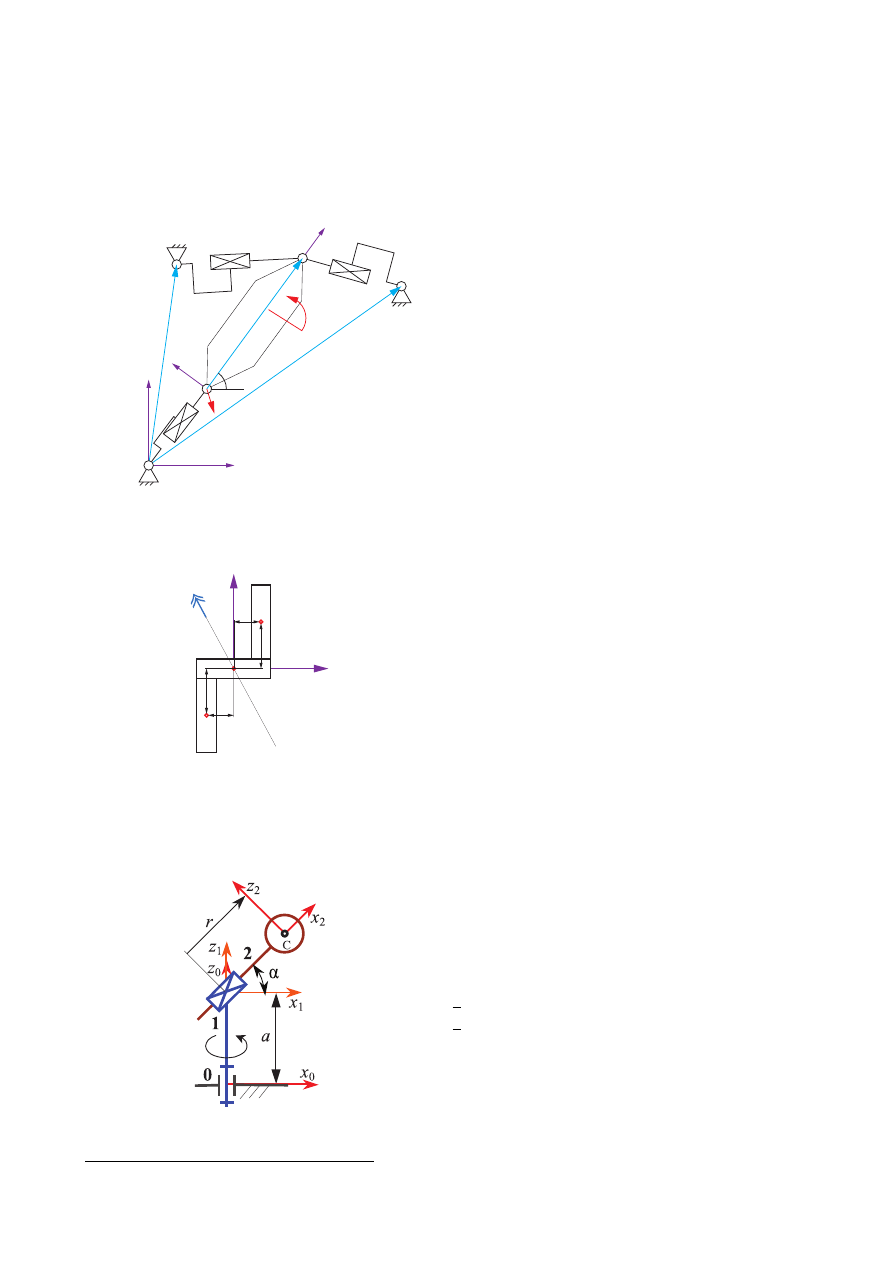
Zadanie 3. Manipulator przenosi jednorodną kulę o masie m i promieniowym momencie
bezwładności J . W rozpatrywanej chwili układy π
0
i π
1
mają jednakową orientację. Obliczyć
F
(0)
oraz moment M
(0)
jakimi człon 1 oddziałuje na podstawę 0. Do tabelki wpisać składową
momentu M
z
ω
J = 8
m = 4
α = π/4
a = 0.6
ω = 4
˙
ω = 8
r = 0.2
√
2
˙r = 0.8
√
2
¨
r = 0
Wszelkie zadania zastrzeżone. Rozwiązywanie surowo wzbronione.
Wyszukiwarka
Podobne podstrony:
Kolokwium 2 2015 01 29
sciaga skrawki egzamin spis tresci, AGH, Semestr V, TOU [Jabłoński, Zagórski], TOU Egzamin - Edwan,
DGP 2015 01 29 ubezpieczenia i swiadczenia
DGP 2015 01 29 kadry i place
2015 01 29 Oskarżeni o gwałt będą m
2015 01 20 EM Kolokwium 100
2015 01 20 EM Kolokwium 100
z 13 2015 01 X k
kolokwium 14 01 10, polibuda, 3 semestr, fizyka i inżynieria materiałowa (kolokwia, sprawozdania, w
Kolokwium 2015
b 35 2015 01 X k
kolokwium 2007 01 17
Kolokwium 2015 10 27
DGP 2015 01 12 rachunkowosc i audyt
2011.01.29 - PZPN - Egzamin - Obserwatorzy, Testy, testy sędziowskie
Zagadnienia z nasiennictwa i szkółkarstwa leśnego do kolokwium 2 2015, Leśnictwo UWM Olsztyn, Semest
więcej podobnych podstron