Politechnika Warszawska
Instytut Automatyki i Robotyki
Prof. dr hab. inż. Jan Maciej Kościelny
PODSTAWY AUTOMATYKI
część 1
Pojęcia podstawowe, klasyfikacja układów sterowania

2
Program
Podstawy Automatyki
Instytut Automatyki i Robotyki
Autorzy programu:
prof. dr hab. inż. Jan Maciej Kościelny, doc. dr inż. Marek Żelazny
Semestr IV-V
Liczba godzin zajęć według planu studiów:
Wykład 30
E
Ćwiczenia 15
Laboratorium 30
Liczba punktów kredytowych: 6

3
Program wykładu
Pojęcia podstawowe: sygnał, informacja, element automatyki, układ automatyki, obiekt,
regulator. Struktury przyrządowe i klasyfikacje układów automatyki.
Układy liniowe: opis matematyczny (równania różniczkowe, transmitancja operatorowa,
równania stanu i wyjść, podstawy opisu układów dyskretnych), linearyzacja,
przedstawianie właściwości statycznych i dynamicznych. Podstawowe człony
dynamiczne, charakterystyki częstotliwościowe. Schematy blokowe.
Obiekty regulacji i regulatory przemysłowe: obiekty statyczne i astatyczne, metody
identyfikacji. Regulatory PID - realizacja mikroprocesorowa, właściwości funkcjonalne.
Wymagania stawiane układom automatyki: stabilność (podstawowe kryteria),
dokładność statyczna, jakość dynamiczna i jej wskaźniki. Dobór nastaw regulatorów.
Struktury układów automatyki i przykładowe zastosowania: regulacja
jednoobwodowa, kaskadowa, z korekcją dynamiczną, regulacja stosunku prosta i
kaskadowa, układy zamknięto-otwarte. Zastosowania w energetyce, przemyśle
chemicznym, przemyśle spożywczym.
Układy nieliniowe: typowe nieliniowości, opis matematyczny, rodzaje stabilności, metody
Lapunowa. Płaszczyzna fazowa. Metoda funkcji opisującej.
Technika automatyzacji: Realizowane zadania. Struktury funkcjonalne układów
automatyki. Struktury sprzętowe: systemy zintegrowane - klasy DCS, sterowniki
programowalne, systemy monitorowania - SCADA, sieci w układach automatyki,
układy blokad i zabezpieczeń. Konfigurowanie układów automatyki.

4
Program ćwiczeń audytoryjnych
Ćwiczenia audytoryjne są ściśle skorelowane z materiałem wykładowym i
obejmują:
- formułowanie opisu matematycznego wybranych elementów automatyki
- wyznaczanie odpowiedzi na typowe wymuszenia przy użyciu rachunku
operatorowego (przekształcenia Laplace
- układanie i przekształcanie schematów blokowych
- analityczne i wykreślne metody wyznaczania charakterystyk
częstotliwościowych
- badanie stabilności układów automatyki (metody Hurwitza i Nyquista)
- badanie dokładności statycznej układów automatyki
- identyfikacja obiektów regulacji na podstawie zarejestrowanych
odpowiedzi skokowych obiektu lub charakterystyk częstotliwościowych
- dobór nastaw regulatora do przykładowych obiektów regulacji
- analiza nieliniowych układów automatyki metodą płaszczyzny fazowej
- badanie stabilności nieliniowych układów automatyki rozszerzoną metodą
Nyquista (wykorzystanie funkcji opisującej)
5
Literatura do wykładu
Żelazny M.: Materiały pomocnicze do wykładu: Podstawy Automatyki
Żelazny M.: Podstawy Automatyki. WNT, Warszawa 1976
Kościelny W.: Materiały pomocnicze do nauczania podstaw automatyki. Oficyna
Wydawnicza PW, Warszawa 1997
Gessing R.: Podstawy automatyki. Wydawnictwo Politechniki Śląskiej, 2001
Mazurek J., Vogt H., Zydanowicz W.: Podstawy automatyki. Oficyna Wydawnicza
PW, Warszawa 2002
Pułaczewski J, Szacka K. Manitius A.: Zasady automatyki. WNT, Warszwa, 1974
Węgrzyn S.: Podstawy automatyki. PWN, Warszawa, 1980
Kaczorek T.: Teoria układów regulacji automatycznej. WNT, Warszawa, 1974
Pełczewski W.: Teoria sterowania. Ciągłe stacjonarne układy liniowe. WNT,
Warszawa1980
Dorf R., Bishop R.: Modern Control Systems. Addison-Wesley Publishing
Company, 1995
Żelazny M.: Materiały pomocnicze do wykładu: Podstawy Automatyki
Żelazny M.: Podstawy Automatyki. WNT, Warszawa 1976
Kościelny W.: Materiały pomocnicze do nauczania podstaw automatyki. Oficyna
Wydawnicza PW, Warszawa 1997
Gessing R.: Podstawy automatyki. Wydawnictwo Politechniki Śląskiej, 2001
Mazurek J., Vogt H., Zydanowicz W.: Podstawy automatyki. Oficyna Wydawnicza
PW, Warszawa 2002
Pułaczewski J, Szacka K. Manitius A.: Zasady automatyki. WNT, Warszwa, 1974
Węgrzyn S.: Podstawy automatyki. PWN, Warszawa, 1980
Kaczorek T.: Teoria układów regulacji automatycznej. WNT, Warszawa, 1974
Pełczewski W.: Teoria sterowania. Ciągłe stacjonarne układy liniowe. WNT,
Warszawa1980
Dorf R., Bishop R.: Modern Control Systems. Addison-Wesley Publishing
Company, 1995
6
Literatura do ćwiczeń audytoryjnych
Holejko D., Kościelny W., Niewczas W.: Zbiór zadań z podstaw automatyki. Oficyna
Wydawnicza PW, Warszawa 1985
Amborski K., Marusak A.: Teoria sterowania w ćwiczeniach. PWN, Warszawa 1978
Holejko D., Kościelny W., Niewczas W.: Zbiór zadań z podstaw automatyki. Oficyna
Wydawnicza PW, Warszawa 1985
Amborski K., Marusak A.: Teoria sterowania w ćwiczeniach. PWN, Warszawa 1978
7
Pojęcia podstawowe
Sygnał - wielkość fizyczna występująca w procesie sterowania będąca
nośnikiem informacji
(sygnały ciągłe i dyskretne)
Sygnał - wielkość fizyczna występująca w procesie sterowania będąca
nośnikiem informacji
(sygnały ciągłe i dyskretne)
Informacja - wartość lub kształt przebiegu sygnału
Informacja - wartość lub kształt przebiegu sygnału
Sygnały:
• ciągłe - będące ciągłą funkcją czasu
• dyskretne (wielostanowe) – wartości należą do dyskretnego
(przeliczalnego) zbioru
Sygnały dyskretne można otrzymać z sygnału ciągłego w wyniku
kwantowania wartości
Szczególnym przypadkiem sygnałów dyskretnych są sygnały binarne
– {0,1})
Sygnały:
• ciągłe - będące ciągłą funkcją czasu
• dyskretne (wielostanowe) – wartości należą do dyskretnego
(przeliczalnego) zbioru
Sygnały dyskretne można otrzymać z sygnału ciągłego w wyniku
kwantowania wartości
Szczególnym przypadkiem sygnałów dyskretnych są sygnały binarne
– {0,1})
8
Pojęcia podstawowe
Układ automatyki - zespół wzajemnie powiązanych elementów biorących
udział w sterowaniu automatycznym danego procesu
(uporządkowany zgodnie z kierunkiem przekazywania sygnałów)
Układ automatyki - zespół wzajemnie powiązanych elementów biorących
udział w sterowaniu automatycznym danego procesu
(uporządkowany zgodnie z kierunkiem przekazywania sygnałów)
Sterowanie automatyczne - oddziaływanie na proces, którego
zamierzony przebieg chcemy uzyskać bez udziału człowieka, za
pomocą urządzeń nazywanych ogólnie aparaturą automatyki.
Sterowanie automatyczne - oddziaływanie na proces, którego
zamierzony przebieg chcemy uzyskać bez udziału człowieka, za
pomocą urządzeń nazywanych ogólnie aparaturą automatyki.
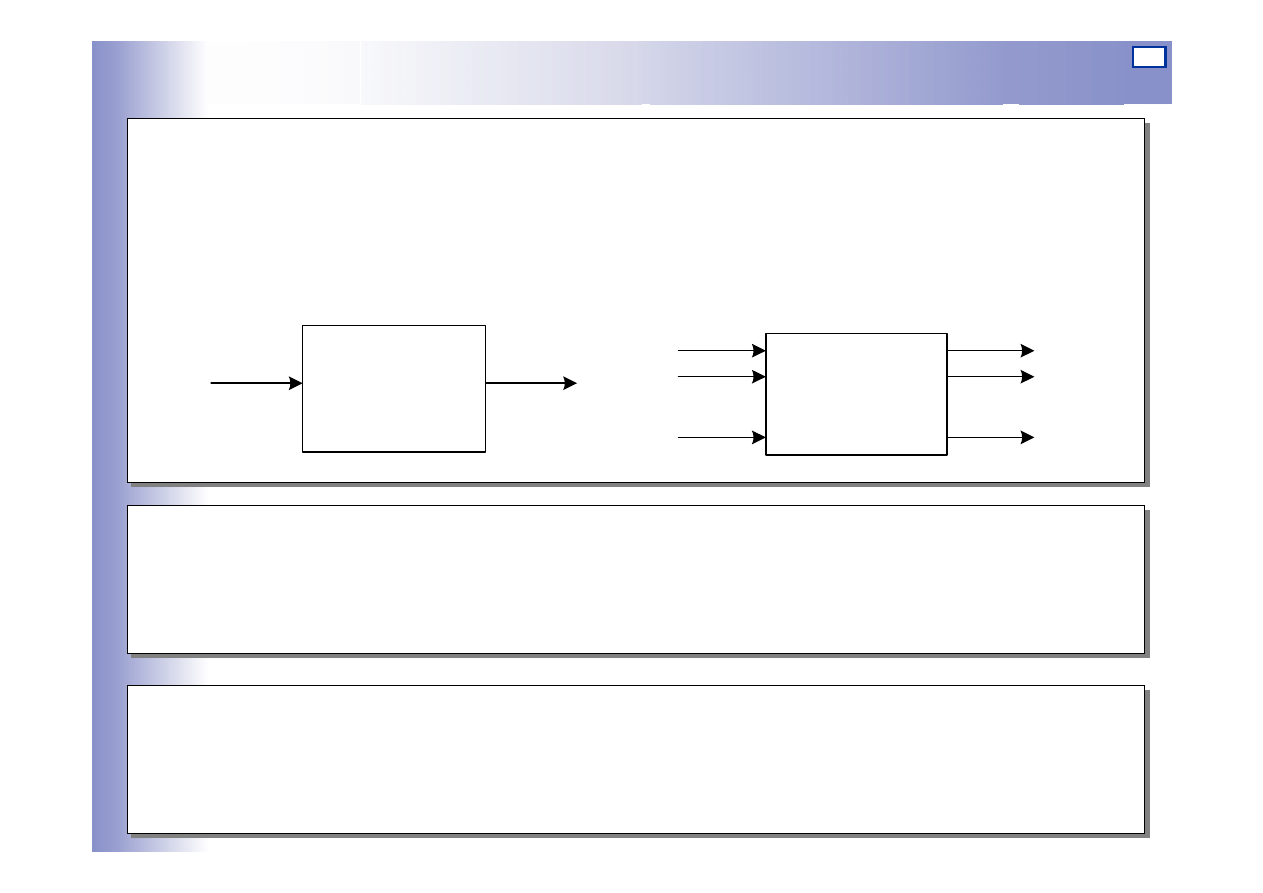
Element automatyki (człon) - podzespół, zespół, przyrząd lub
urządzenie, w którym można wyróżnić sygnał wejściowy i sygnał
wyjściowy - rys. a, lub sygnały wejściowe i wyjściowe - rys. b.
Element automatyki (człon) - podzespół, zespół, przyrząd lub
urządzenie, w którym można wyróżnić sygnał wejściowy i sygnał
wyjściowy - rys. a, lub sygnały wejściowe i wyjściowe - rys. b.
a)
b)
..
.
..
.
u
1
u
2
u
m
y
1
y
2
y
m
u
y
9
Pojęcia podstawowe
Układy sterowania procesami ciągłymi:
• otwarte
• zamknięte (ze sprzężeniem zwrotnym)
-------------------
• ciągłe
• dyskretne (kwantowane w czasie)
Układy sterowania procesami ciągłymi:
• otwarte
• zamknięte (ze sprzężeniem zwrotnym)
-------------------
• ciągłe
• dyskretne (kwantowane w czasie)
Procesy:
• ciągłe – ciągłe sygnały
• dyskretne (binarne) – dyskretne (binarne) wartości sygnałów
Procesy:
• ciągłe – ciągłe sygnały
• dyskretne (binarne) – dyskretne (binarne) wartości sygnałów
Układy sterowania :
• procesami ciągłymi
• procesami dyskretnymi (odrębny wykład)
Układy sterowania :
• procesami ciągłymi
• procesami dyskretnymi (odrębny wykład)
10
Sterowanie w układzie otwartym
w
u
z
z
y
U.S.
O
w - wartość zadana wielkości sterowanej
u - sygnał sterujący
y - wielkość sterowana
z - sygnał zakłócający
US - urządzenie sterujące
O – obiekt (proces) podlegający sterowaniu
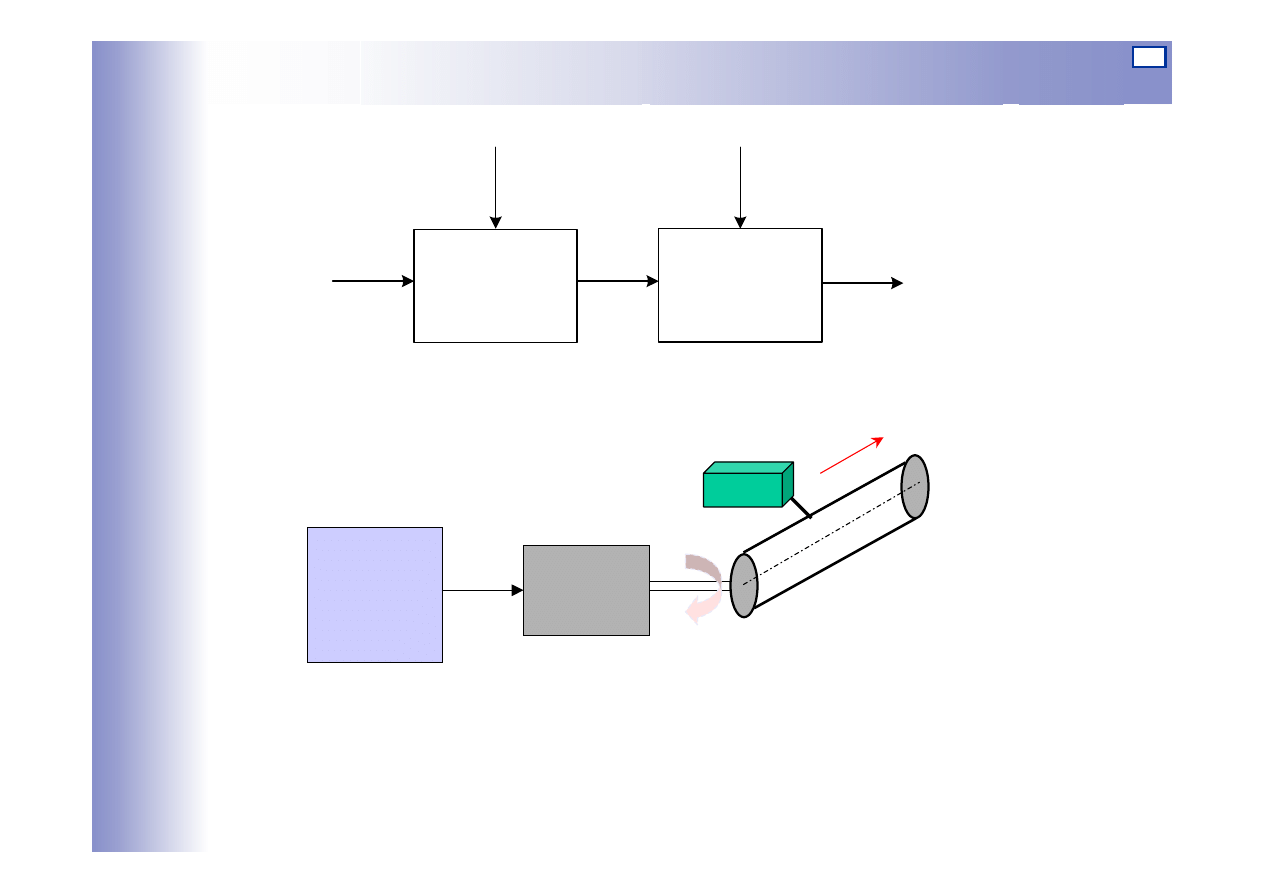
11
Sterowanie w układzie otwartym
w
u
z
z
y
U.S.
O
Układ
sterujący
Silnik
skokowy
u
y
12
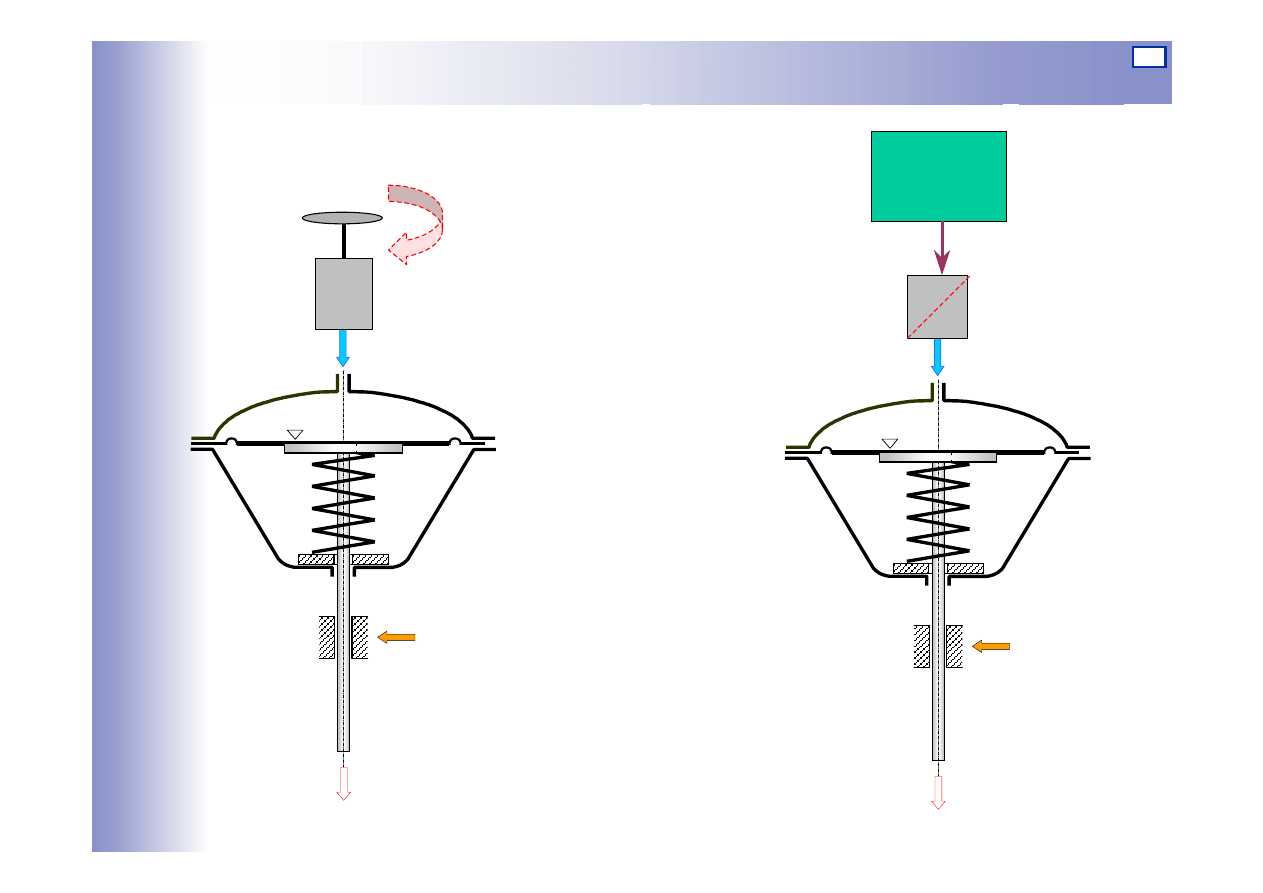
Sterowanie w układzie otwartym
p
s
k
s
A
e
k
d
z
y
Zadajnik
ciśnienia
ręczne
automatyczne
Sterownik
p
s
k
s
A
e
k
d
z
y
e
p
u
13
Sterowanie w układzie zamkniętym
e
u
z
z
y
U.S.
O
w
+
-
tor główny w y
sprzężenie zwrotne
e=w-y
y - wielkość regulowana
w - wartość zadana wielkości regulowanej
e – odchyłka regulacji
u - sygnał sterujący
z - sygnał zakłócający
US - regulator
O -obiekt regulacji (proces regulowany)
Układ ze sprzężeniem zwrotnym,
14
Sterowanie w układzie zamkniętym
Układ regulacji automatycznej
e
u
z
z
y
U.S.
O
w
+
-
tor główny w y
sprzężenie zwrotne
e=w-y
Tor główny wskazuje zawsze zasadniczą wielkość wejściową układu
(w tym przypadku w) i wielkość wyjściową y. Tor ten ilustruje zwykle
przepływ głównego strumienia materiału lub energii w układzie.
Tor sprzężenia zwrotnego służy do przekazywania informacji.
Zapotrzebowanie energetyczne tego toru jest zwykle pomijanie małe.
Tor główny wskazuje zawsze zasadniczą wielkość wejściową układu
(w tym przypadku w) i wielkość wyjściową y. Tor ten ilustruje zwykle
przepływ głównego strumienia materiału lub energii w układzie.
Tor sprzężenia zwrotnego służy do przekazywania informacji.
Zapotrzebowanie energetyczne tego toru jest zwykle pomijanie małe.
15
Sterowanie ręczne w układzie zamkniętym
e
u
z
z
y
U.S.
O
w
+
-
tor główny w y
sprzężenie zwrotne
e=w-y
Kierunek zadany
Kierunek aktualny
16
Sterowanie ręczne w układzie zamkniętym
Regulacja ręczna temperatury wody w układzie zamkniętym
Realizacja
algorytmu
sterowania
Oddziaływanie
Pomiar temperatury
17
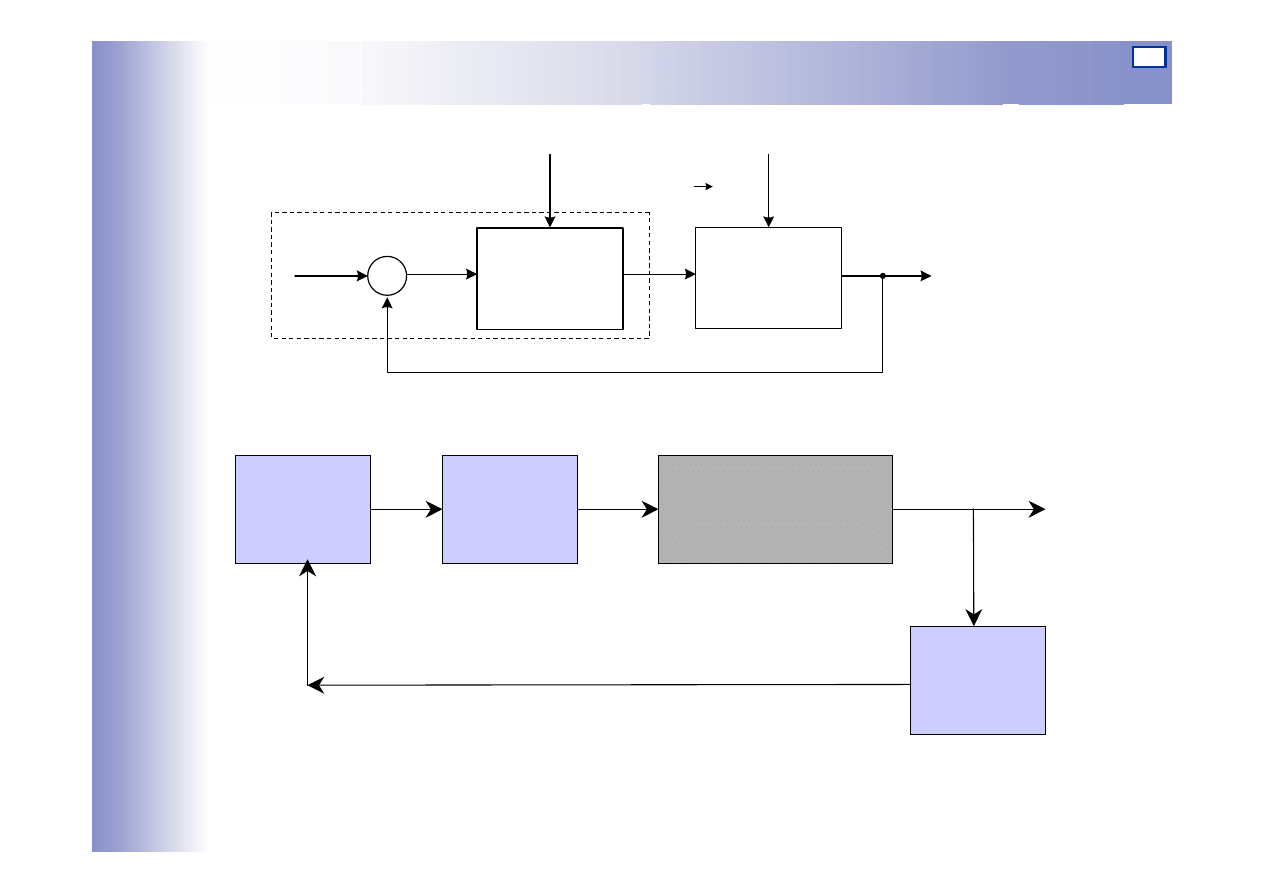
Regulacja automatyczna – struktura aparaturowa
e
u
z
z
y
U.S.
O
w
+
-
tor główny w y
sprzężenie zwrotne
e=w-y
Regulator
Obiekt
regulacji
Przetwornik
pomiarowy
Element
wykonawczy
u
y
y
m
w
18
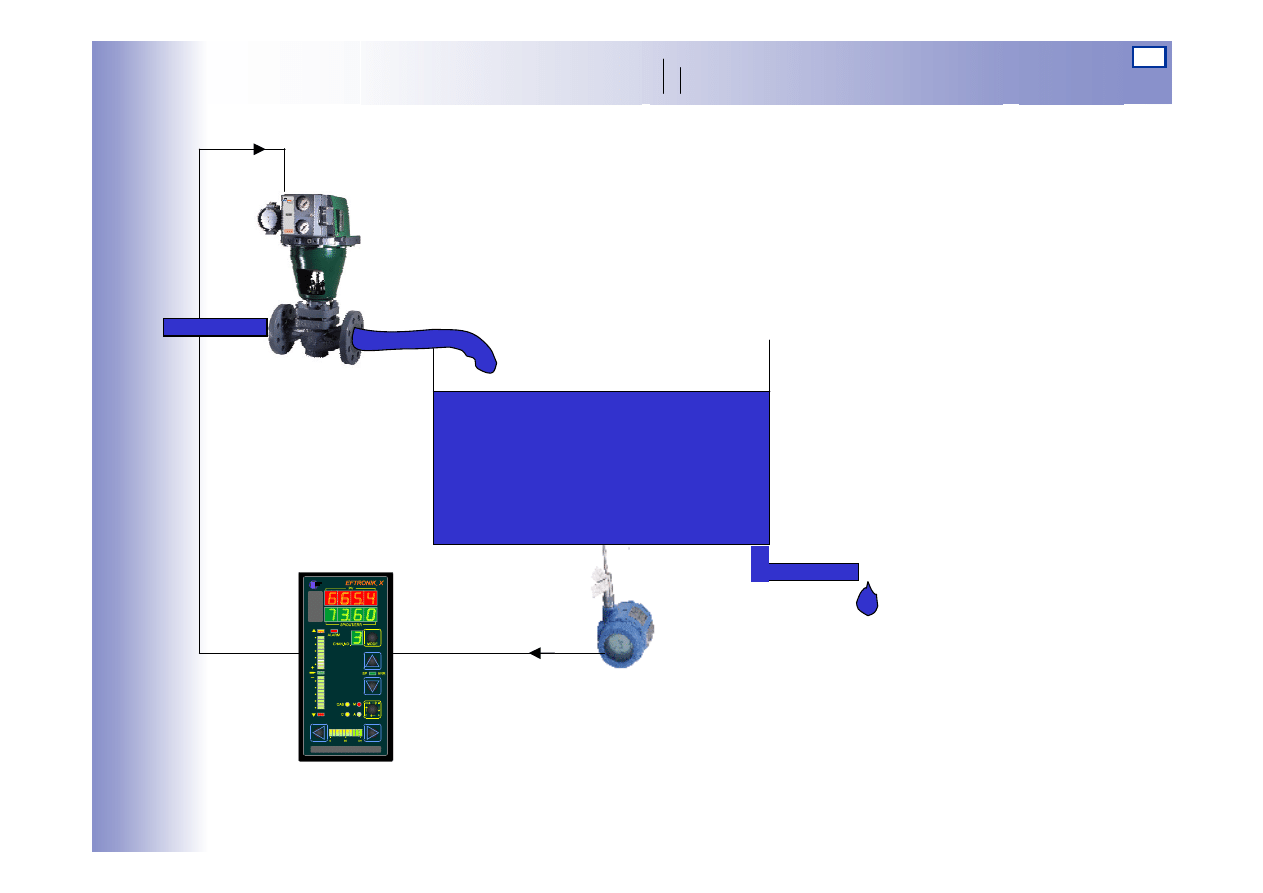
Regulacja automatyczna – struktura aparaturowa
Układ regulacji poziomu wody
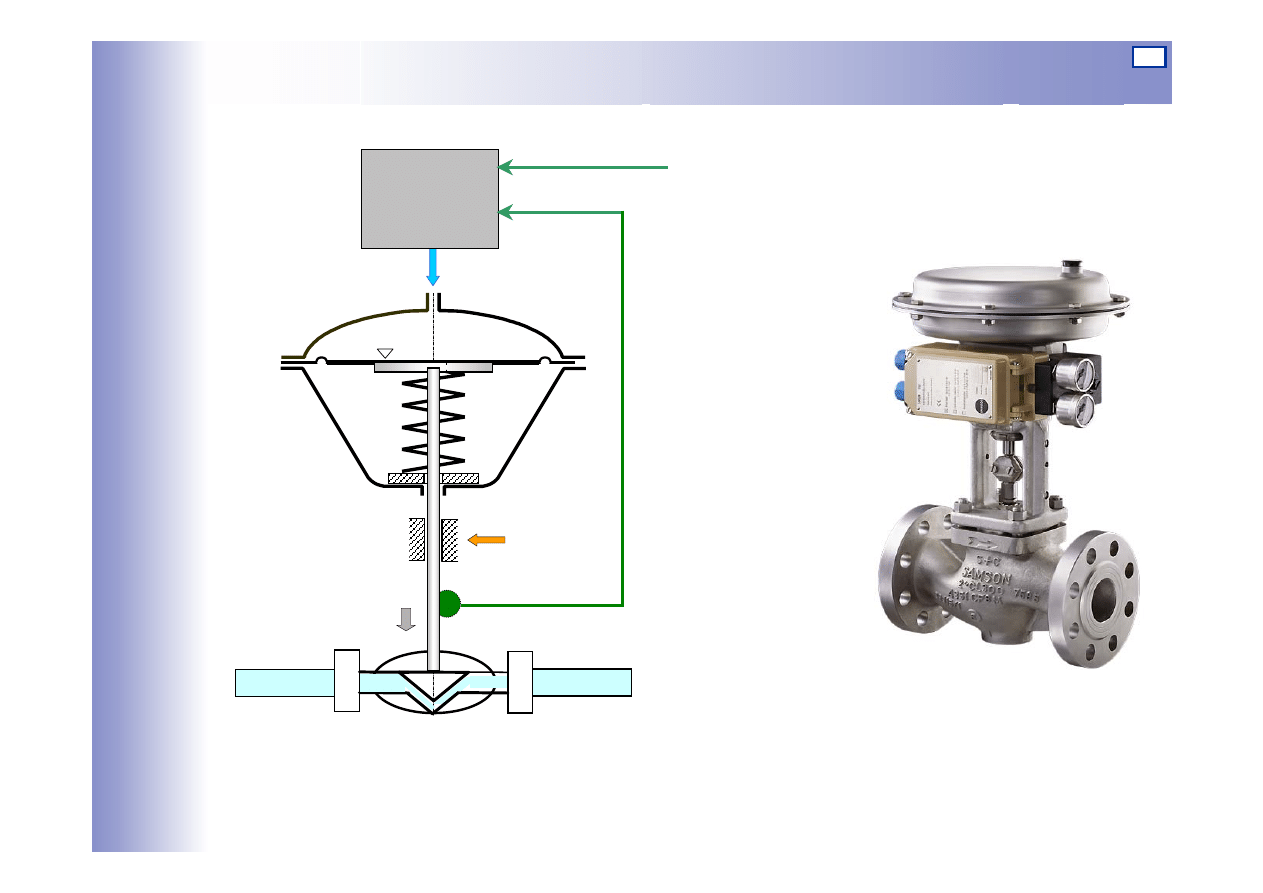
Element wykonawczy
Przetwornik pomiarowy
Regulator
Obiekt regulacji:
proces zmian
poziomu w zbiorniku
y
m
u
19
Regulacja automatyczna
p
s
k
s
A
e
k
d
F
n
Regulator
y
Wartość
zadana
y
m
w
20
Klasyfikacja układów regulacji automatycznej
Ze względu na zadanie realizowane przez układ wyróżnia się:
• układy stabilizujące (układy regulacji stało wartościowej), w=const
• układy programowe (regulacji programowej), w=w(t)
• układy nadążne (serwomechanizmy), w=w[
ϕ(t)]
• inne
Ze względu na zadanie realizowane przez układ wyróżnia się:
• układy stabilizujące (układy regulacji stało wartościowej), w=const
• układy programowe (regulacji programowej), w=w(t)
• układy nadążne (serwomechanizmy), w=w[
ϕ(t)]
• inne
e
u
z
z
y
U.S.
O
w
+
-
tor główny w y
sprzężenie zwrotne
e=w-y
21
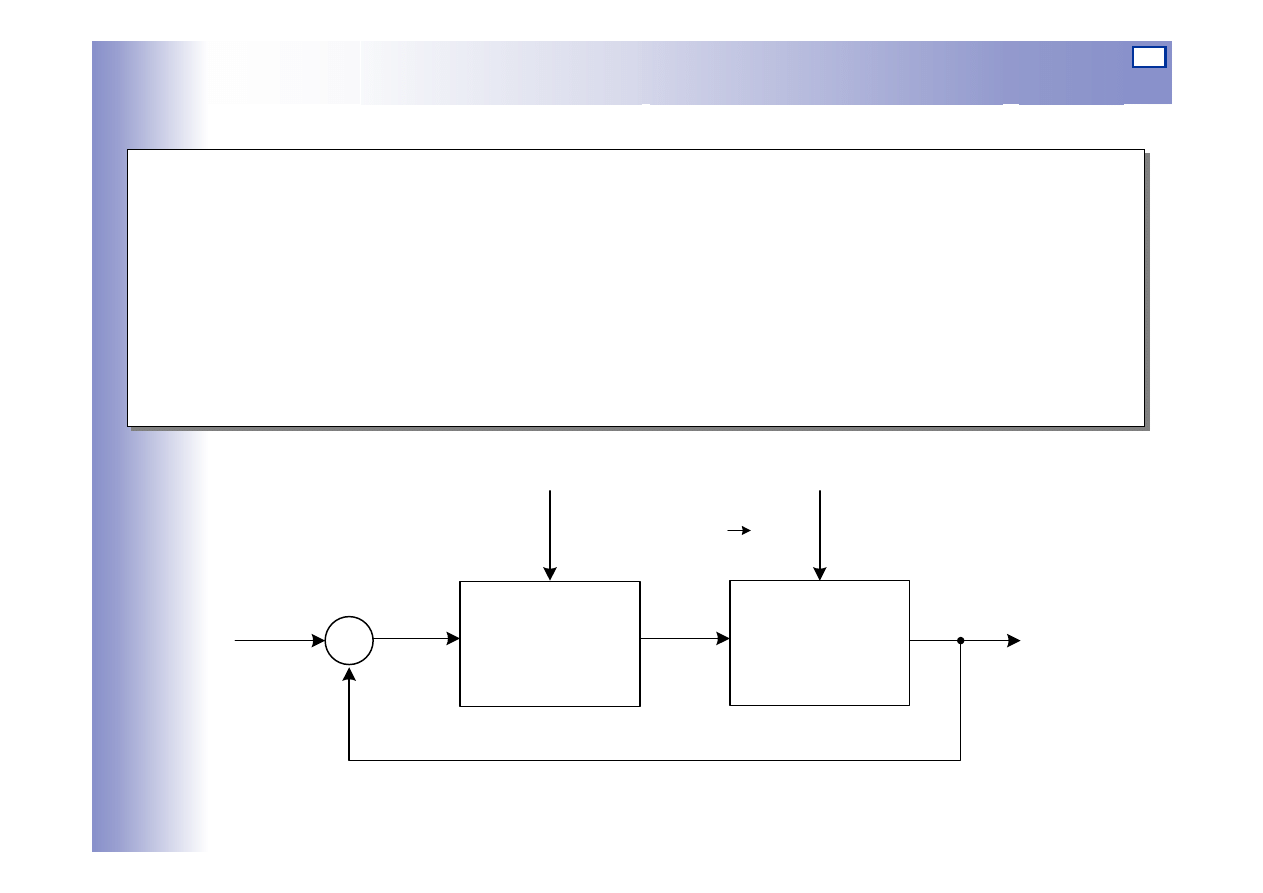
Układy stabilizujące
Zadaniem układu jest utrzymanie możliwie stałej, pożądanej wartości
wielkości wyjściowej oraz minimalizacja wpływu zakłóceń na tę
wielkość.
Często główne zakłócenia wchodzą wraz ze strumieniem materiału lub
energii na obiekt, tworząc tor główny od z
1
do y.
Zadaniem układu jest utrzymanie możliwie stałej, pożądanej wartości
wielkości wyjściowej oraz minimalizacja wpływu zakłóceń na tę
wielkość.
Często główne zakłócenia wchodzą wraz ze strumieniem materiału lub
energii na obiekt, tworząc tor główny od z
1
do y.
e
y
R
O
z
1
u
-
+
-
+
y
z
2
w
ebiegi
pracy
∆"
e=
∆y
R
O
∆z
1
∆u
-
+
∆y
∆z
2
Przykłady: regulacja ciśnienia, poziomu cieczy, natężenia przepływu, pH itd.
22
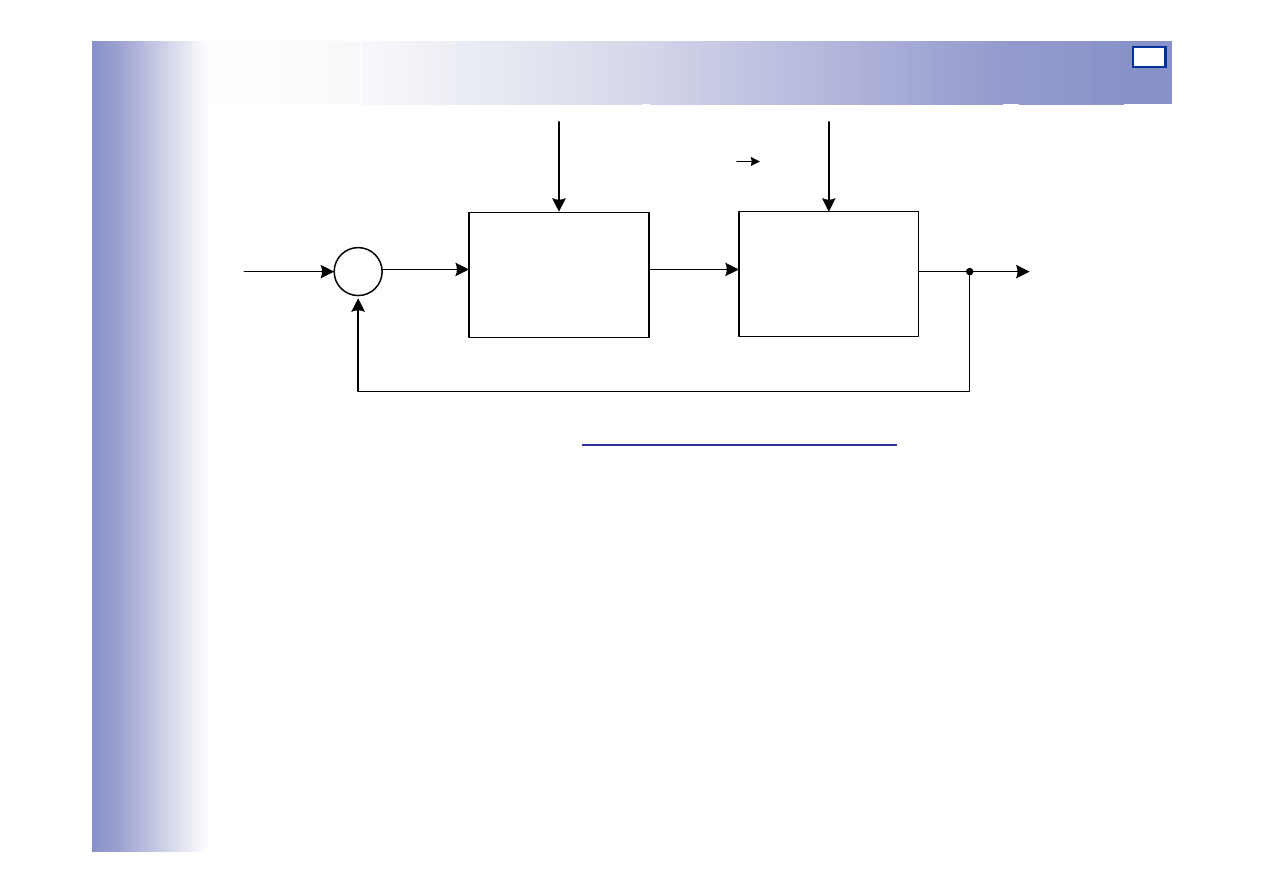
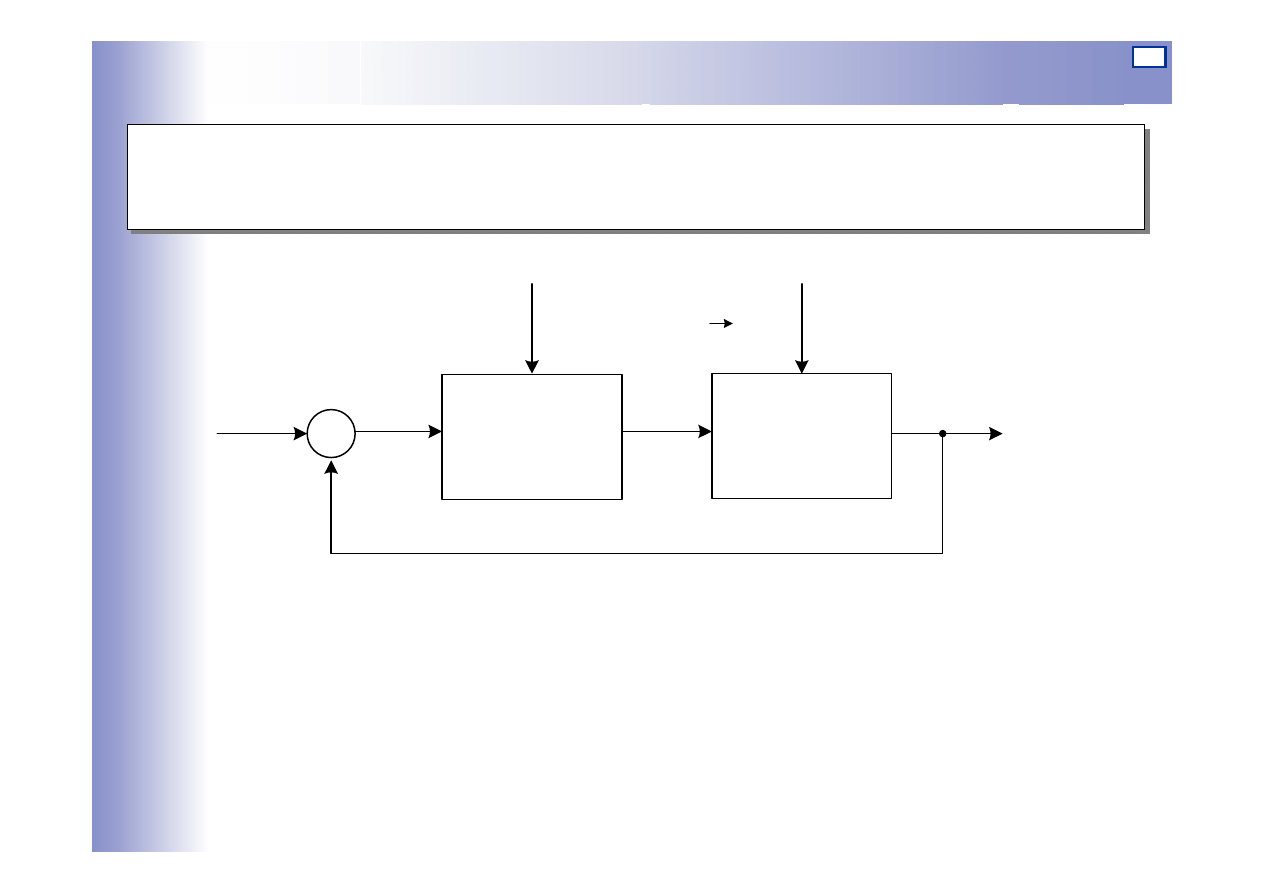
Układy regulacji programowej
Zadaniem układu jest uzyskanie przewidzianych określonym programem
czasowym zmian wielkości regulowanej (sterowanej)
Zadaniem układu jest uzyskanie przewidzianych określonym programem
czasowym zmian wielkości regulowanej (sterowanej)
e
u
z
z
y
U.S.
O
w
+
-
tor główny w y
sprzężenie zwrotne
e=w-y
Przykłady:
• programowa regulacja temperatury w budynku mieszkalnym
• programowa regulacja temperatury w piecu hartowniczym
• programowa regulacja jednej lub kilku wielkości w procesie rozruchu
(stopniowe dochodzenie do nominalnego stanu pracy)
23
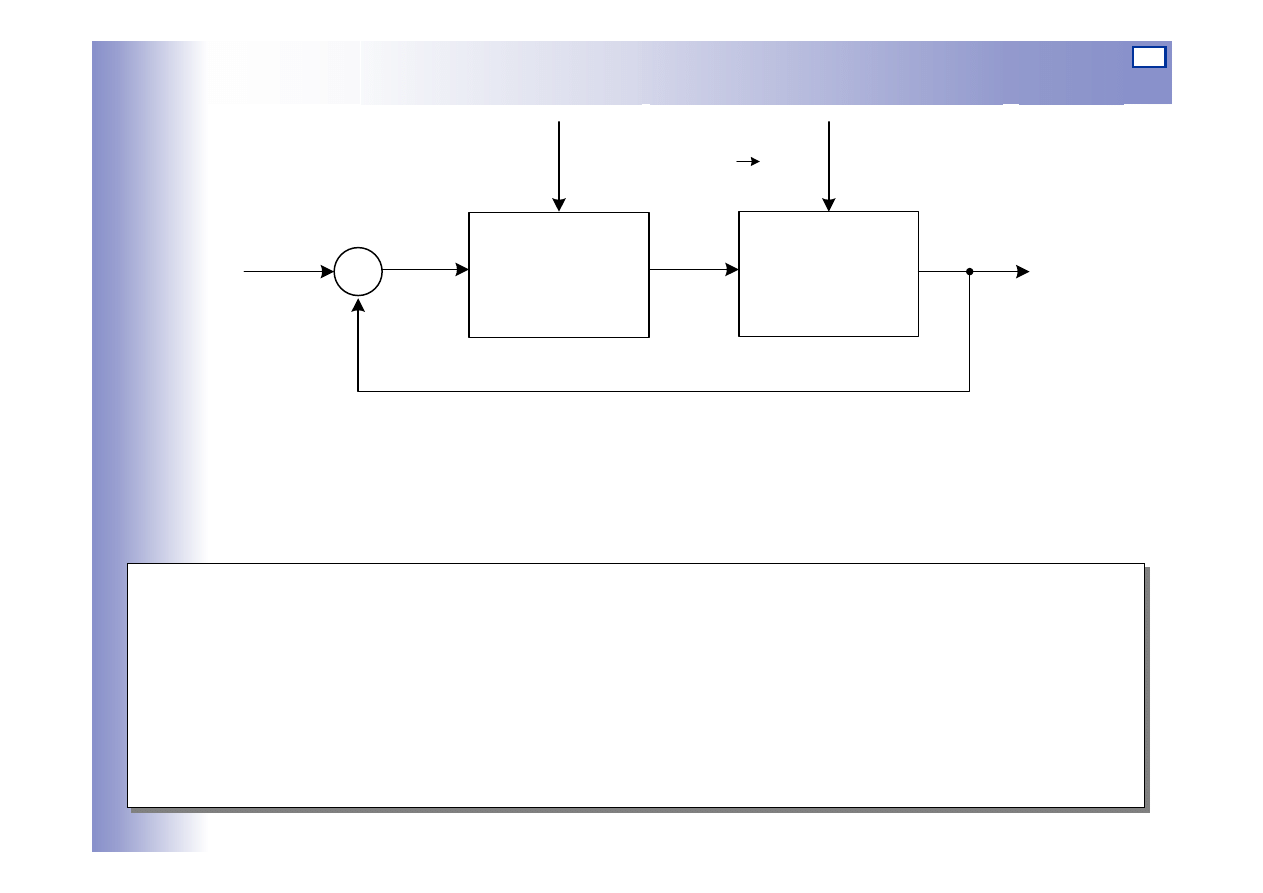
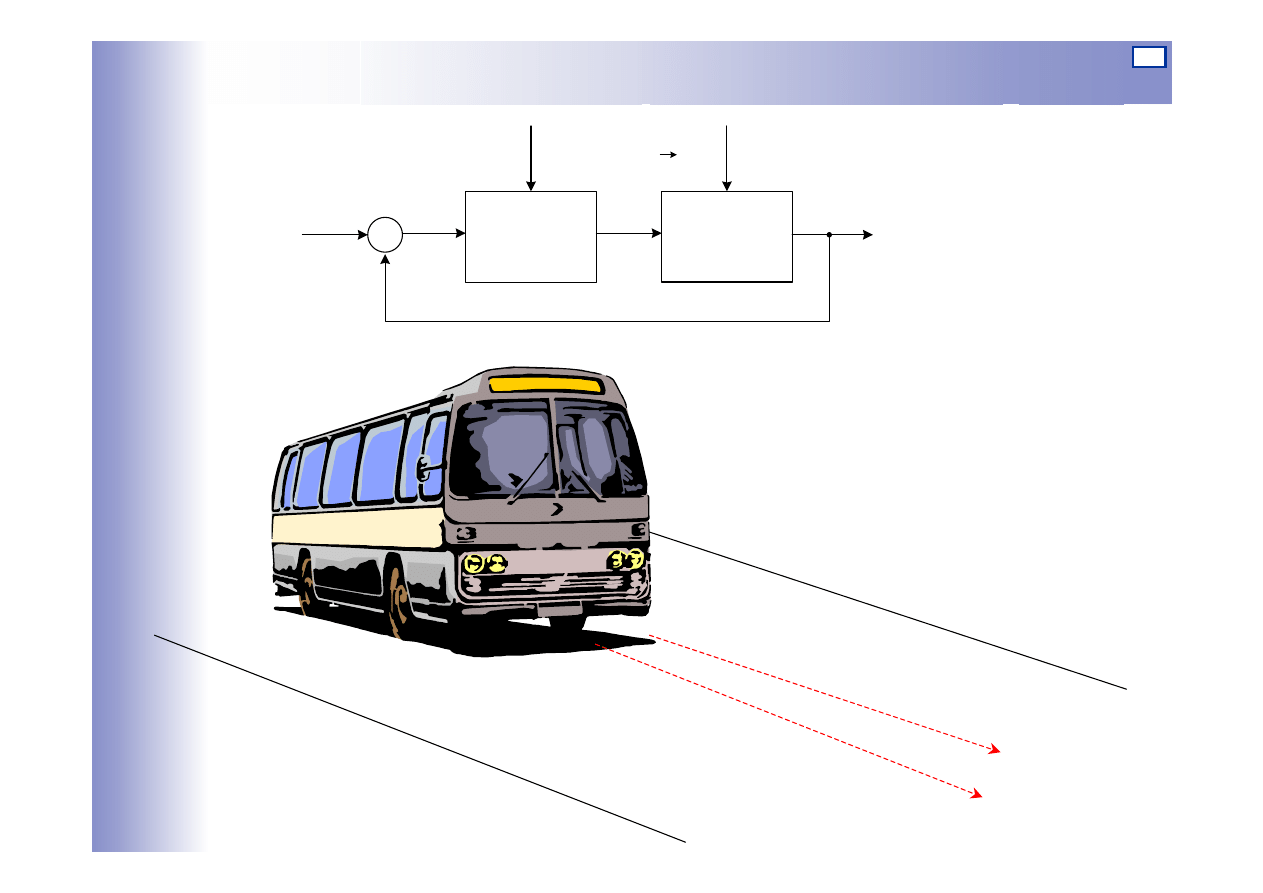
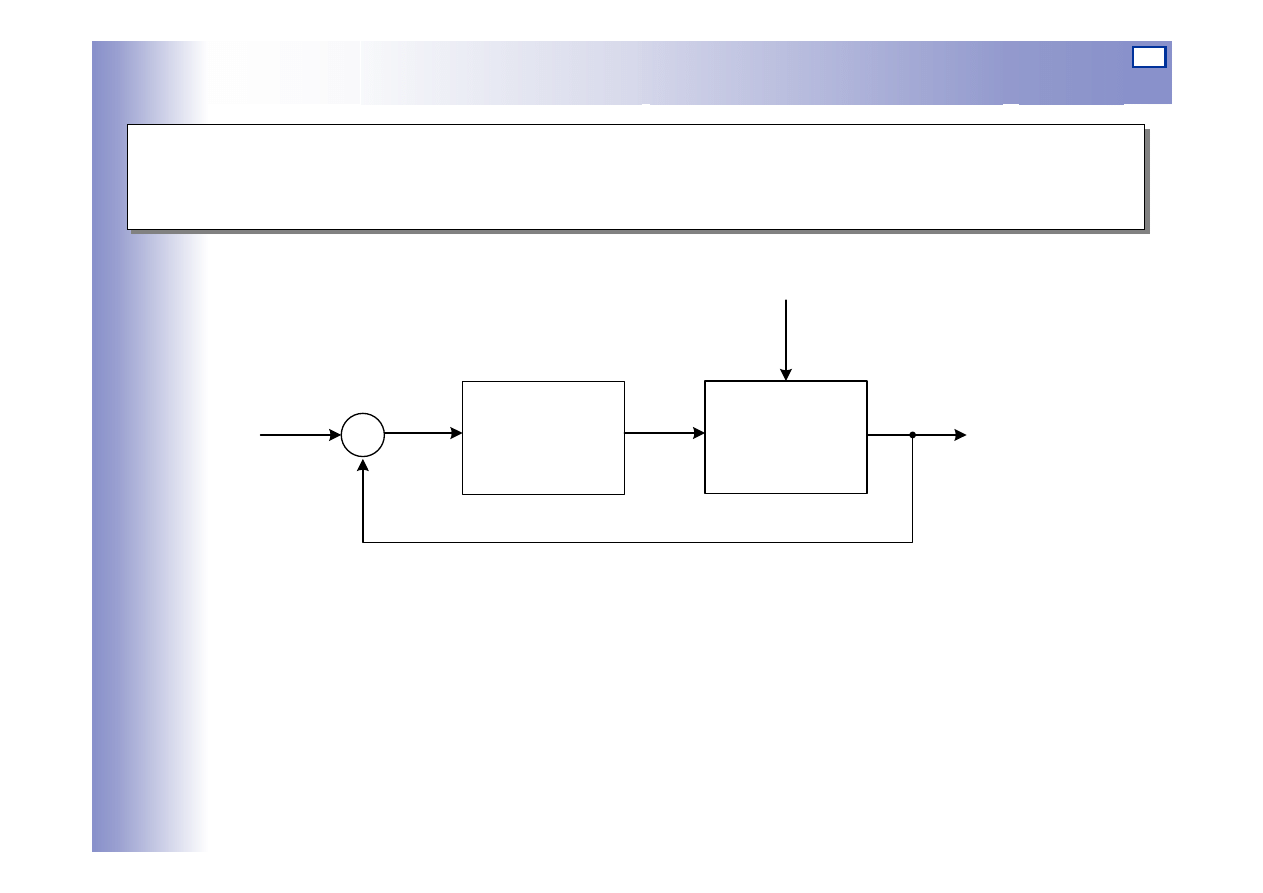
Układy nadążne
Zadaniem układu jest nadążanie wielkości wyjściowej y za zmieniającą się
w nieznany nam sposób wartością zadaną w
Zadaniem układu jest nadążanie wielkości wyjściowej y za zmieniającą się
w nieznany nam sposób wartością zadaną w
e
u
z
y
R
O
w
+
-
Przykłady:
• sterowanie położeniem y dział przeciwlotniczych wg wskazań radaru
określającego położenie w samolotu
• sterowanie położeniem y pisaka rejestratora wg aktualnej wartości w
mierzonej i rejestrowanej wielkości fizycznej
24
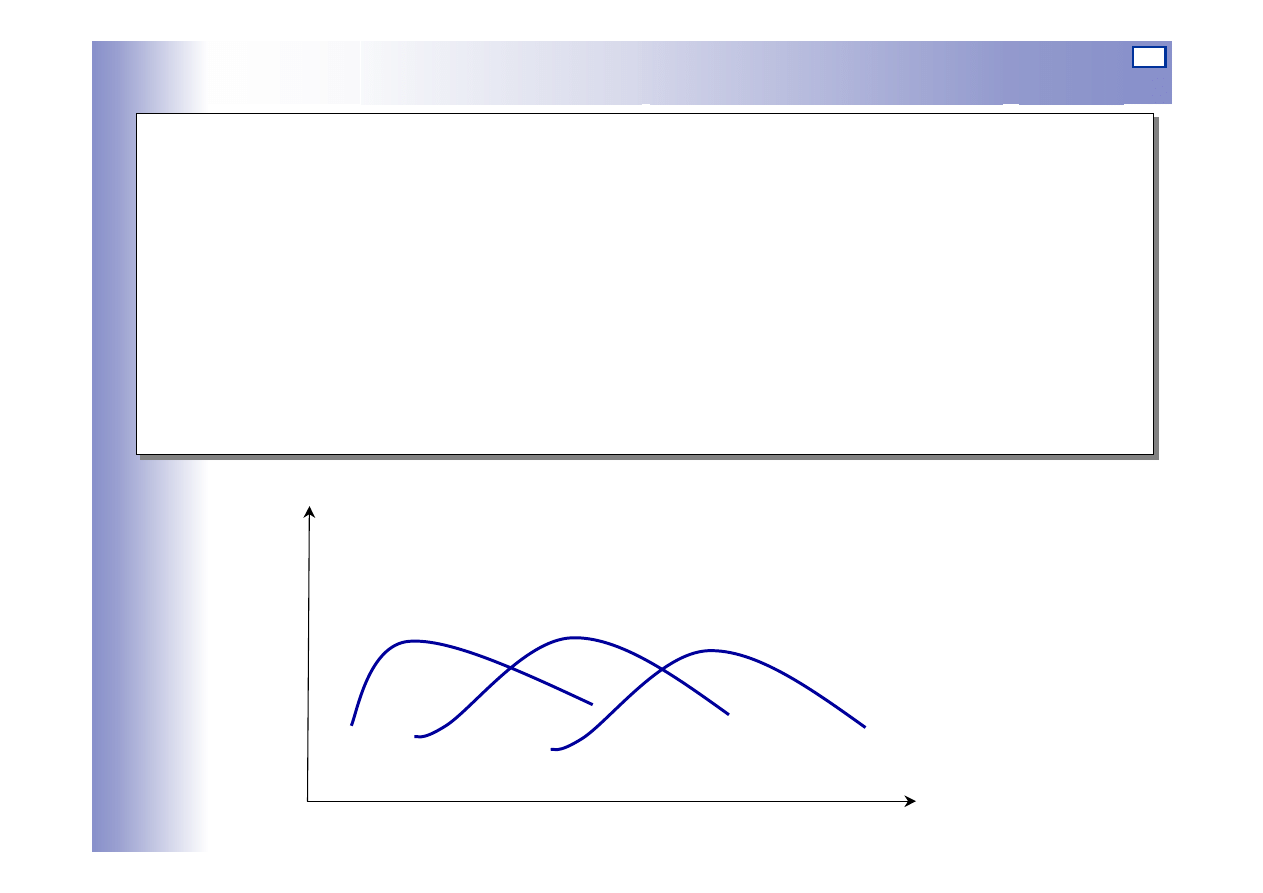
Układy sterowania optymalnego
Zadaniem układu jest utrzymywanie wielkości regulowanej na wartości
ekstremalnej.
Położenie ekstremum zazwyczaj nie jest stałe i zależy od wartości
sygnałów zakłócających
Optymalizacja przebiegu procesów - np. minimalizacja zużycia energii,
minimalizacja kosztów lub maksymalizacja zysku przy założonych
ograniczeniach
Zadaniem układu jest utrzymywanie wielkości regulowanej na wartości
ekstremalnej.
Położenie ekstremum zazwyczaj nie jest stałe i zależy od wartości
sygnałów zakłócających
Optymalizacja przebiegu procesów - np. minimalizacja zużycia energii,
minimalizacja kosztów lub maksymalizacja zysku przy założonych
ograniczeniach
z=a
z=b
z=v
y
u
25
Układy ciągłe i dyskretne w czasie
Układy ciągłe – zmiany wejścia obiektu oraz obserwacje (pomiary) wyjścia
mogą odbywać się w każdym momencie t .
W opisie układu występują wtedy funkcje czasu u(t), y(t), itp.
Układy ciągłe – zmiany wejścia obiektu oraz obserwacje (pomiary) wyjścia
mogą odbywać się w każdym momencie t .
W opisie układu występują wtedy funkcje czasu u(t), y(t), itp.
Układy dyskretne (w czasie) – zmiany wejścia obiektu oraz obserwacje
(pomiary) wyjścia mogą odbywać się w w ściśle określonych
chwilach, zwykle równoodległych -
∆t
W opisie układu występują wtedy dyskretne funkcje czasu, czyli ciągi: u(k),
y(k), itp., gdzie k oznacza numer kolejnego taktu
Sterowanie komputerowe ma charakter dyskretny.
Układy dyskretne (w czasie) – zmiany wejścia obiektu oraz obserwacje
(pomiary) wyjścia mogą odbywać się w w ściśle określonych
chwilach, zwykle równoodległych -
∆t
W opisie układu występują wtedy dyskretne funkcje czasu, czyli ciągi: u(k),
y(k), itp., gdzie k oznacza numer kolejnego taktu
Sterowanie komputerowe ma charakter dyskretny.
26
Układy liniowe i nieliniowe
Układy liniowe – układy, które zawierają wyłącznie elementy liniowe, tzn.
elementy o liniowych charakterystykach statycznych, opisywane
za pomocą liniowych równań różniczkowych lub różnicowych
Rzeczywiste układy są nieliniowe, ale w wielu przypadkach z
zadawalającym przybliżeniem można opisać działanie układu
nieliniowego, linearyzując jego charakterystyki w otoczeniu
nominalnego punktu pracy
Układy liniowe – układy, które zawierają wyłącznie elementy liniowe, tzn.
elementy o liniowych charakterystykach statycznych, opisywane
za pomocą liniowych równań różniczkowych lub różnicowych
Rzeczywiste układy są nieliniowe, ale w wielu przypadkach z
zadawalającym przybliżeniem można opisać działanie układu
nieliniowego, linearyzując jego charakterystyki w otoczeniu
nominalnego punktu pracy
Układy nieliniowe – układy, które zawierają chociaż jeden element
nieliniowy
Układy nieliniowe – układy, które zawierają chociaż jeden element
nieliniowy
27
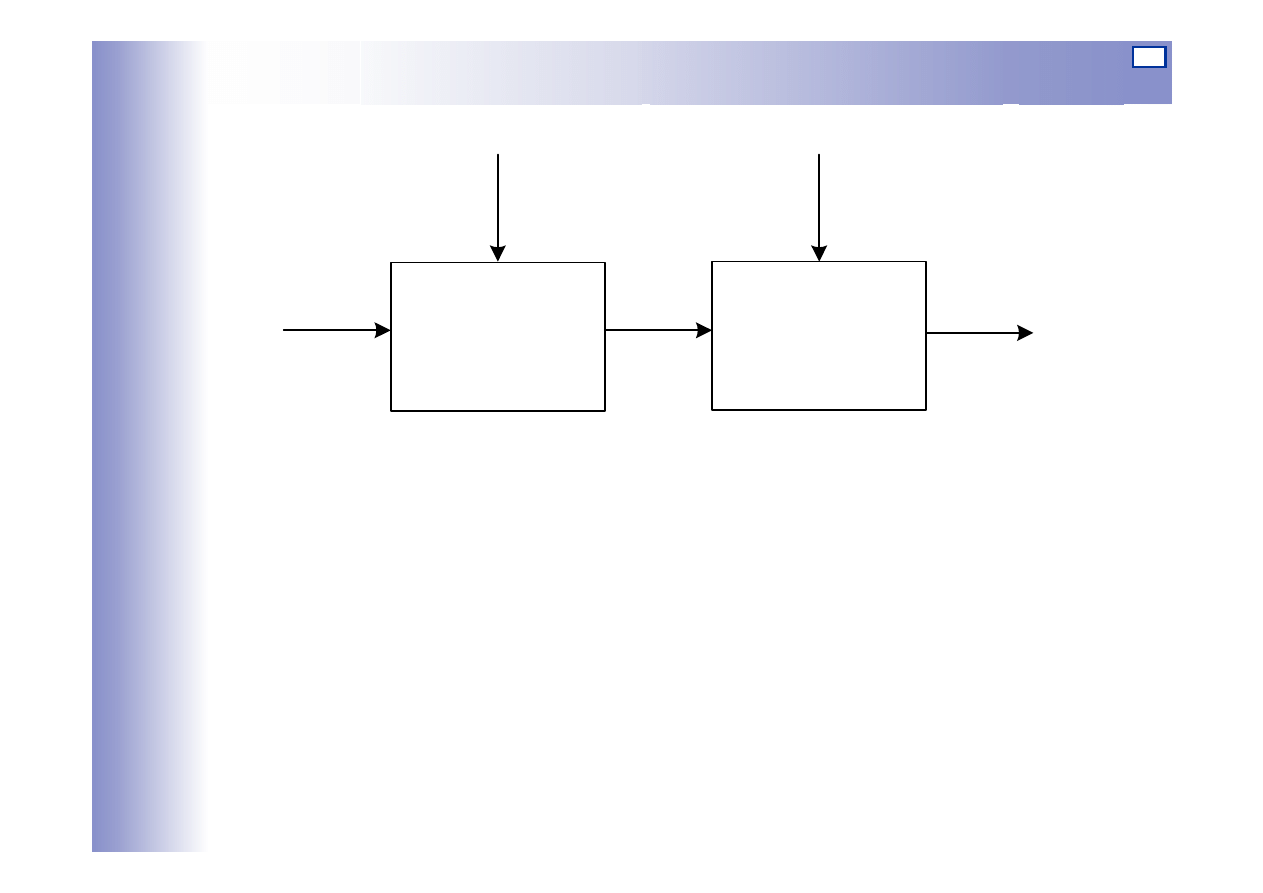
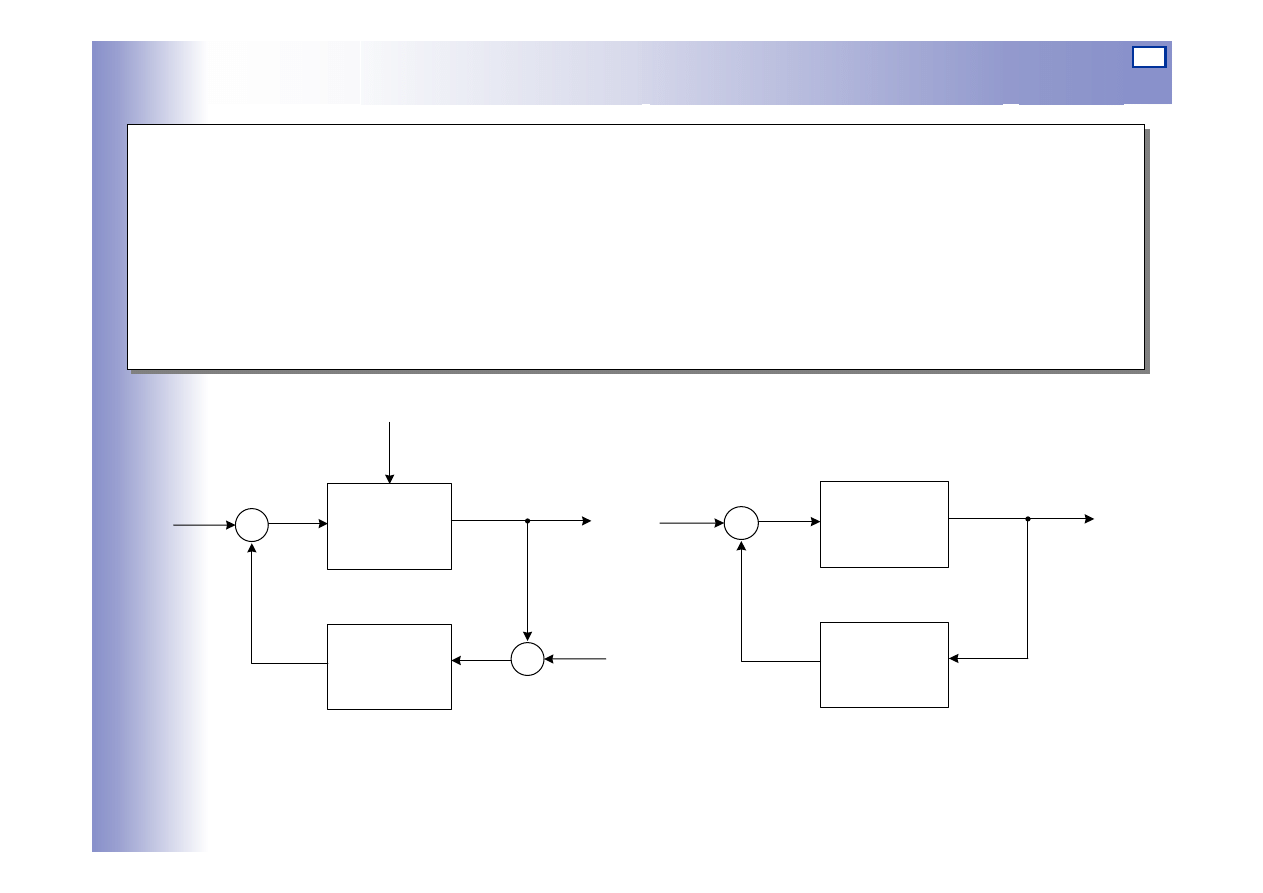
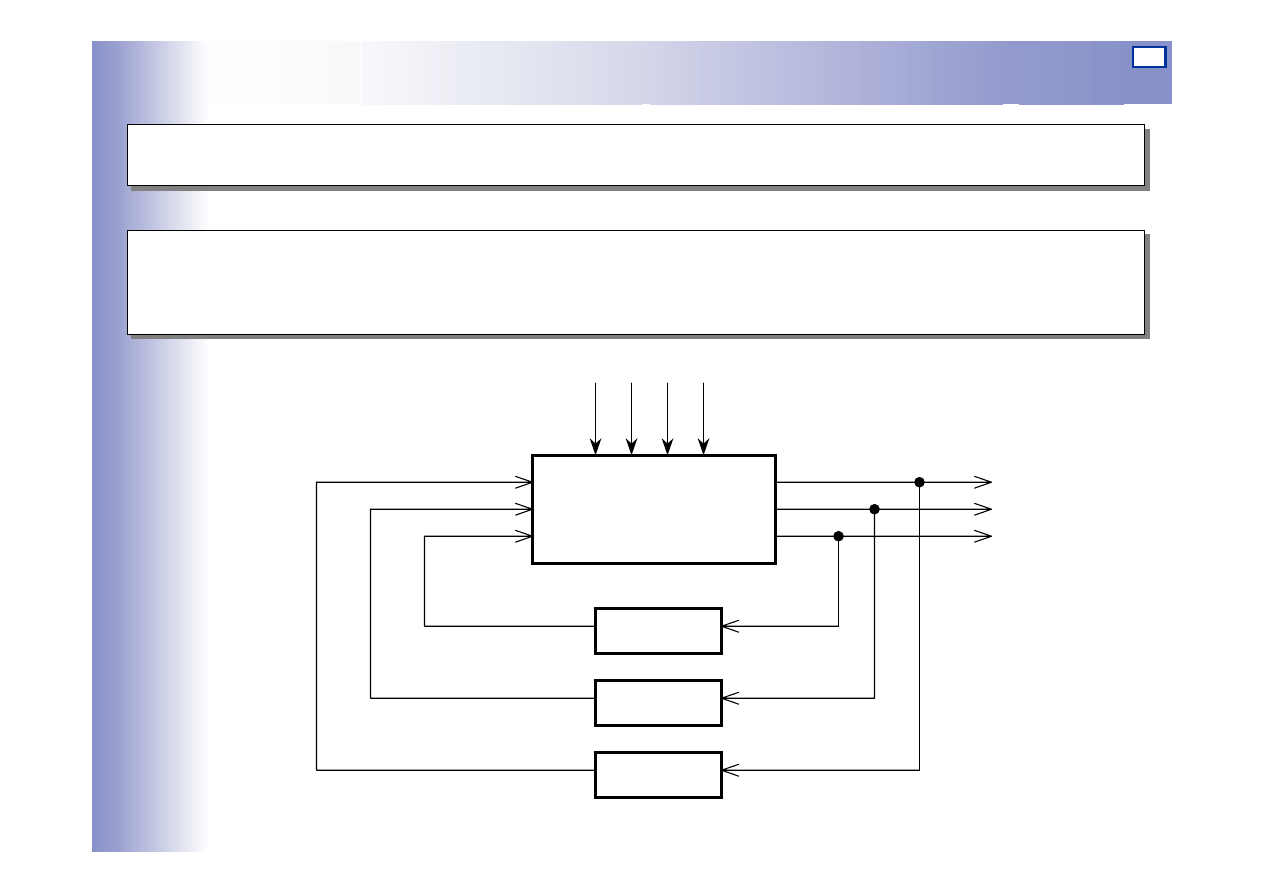
Układy jeno- i wielowymiarowe
Układy jednowymiarowe – układy o jednym wejściu i jednym wyjściu
Układy jednowymiarowe – układy o jednym wejściu i jednym wyjściu
Układy wielowymiarowe – wielkości u oraz y są wektorami (wiele wejść
i wiele wyjść)
Układy wielowymiarowe – wielkości u oraz y są wektorami (wiele wejść
i wiele wyjść)
Obiekt
Reg. 1
Reg. 2
Reg. 3
u
1
u
2
u
3
y
1
y
2
y
3
Wyszukiwarka
Podobne podstrony:
PA1 pojecia podstawowe
Metodyka Obiektowa pojęcia podstawowe
Pojęcia podstawowe, excel
Pojęcia podstawowe, Studia, Prawo, Prawo Kanoniczne
1 pojecia podstawoweid 8796
1 Kancelaria współczesna pojęcia podstawowe
Pojęcie, Podstawy ubezpieczeń, Podstawy ubezpieczeń
Pojęcia podstawowe w układach trójfazowych, POLITECHNIKA LUBELSKA w LUBLINIE_
Z chaosu, Ergonomia-pojecia podstawowe, 1-1
Pojęcia podstawowenowotwory
Pojęcia podstawowe 2
Pojęcia podstawowe
A4 1 Procesy cieplne Ruch ciepła – pojęcia podstawowe
1 pojęcia podstawowe
więcej podobnych podstron