
Automatyka i Robotyka
2011/12
Fizyka 1
Materiały do wykładu 3
21 10 2011
⃗
a
w
⃗
a
w
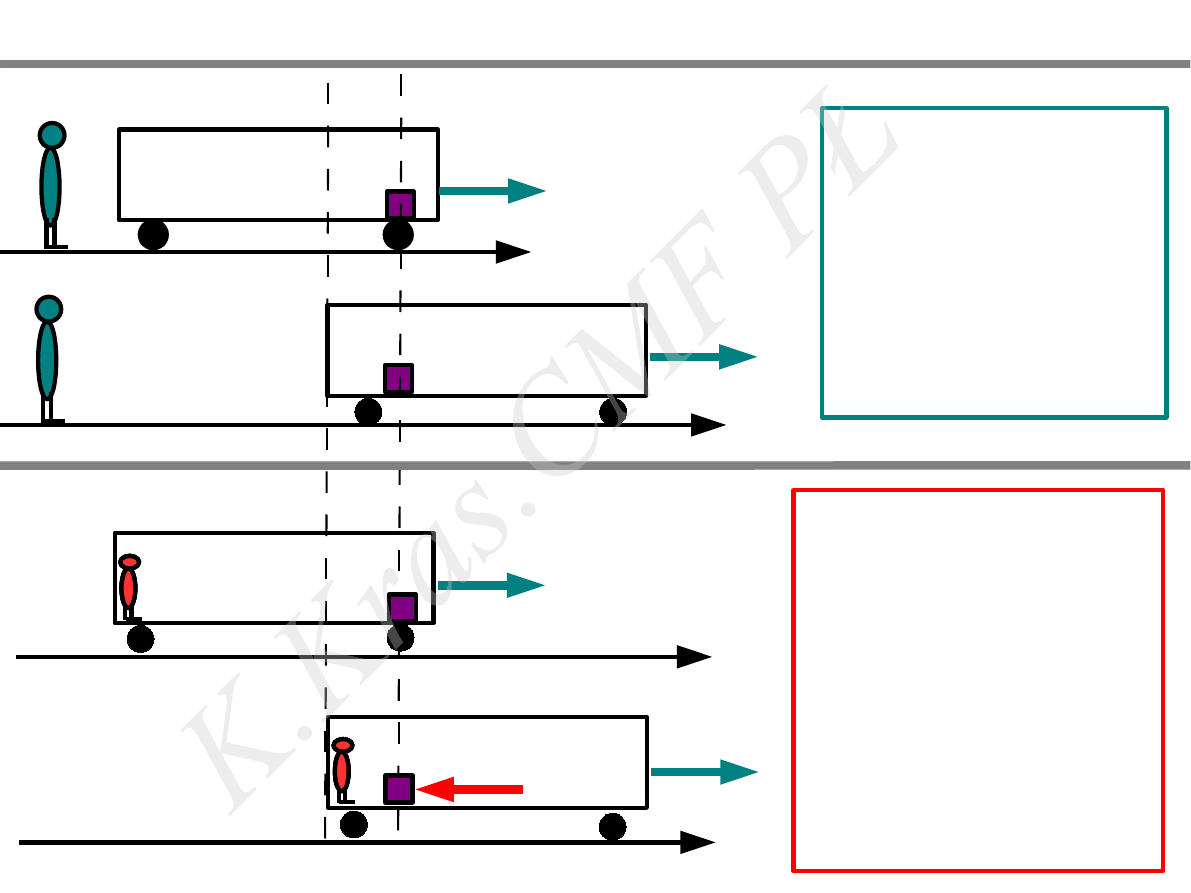
brak tarcia pomiędzy wózkiem i klockiem (m)
inercjalny
⃗
a
w
⃗
a
w
nieinercjalny
F
kx
=
0
a
kx
=
0
x
x
x
x
przyspieszenie klocka
względem ziemi
⃗
a
w
⃗
B
a
kx
≠
0
a
kx
= −
a
w
m a
kx
=
0
przyspieszenie klocka
względem wagonu
m a
kx
=
m(−a
w
)
⃗
a
w
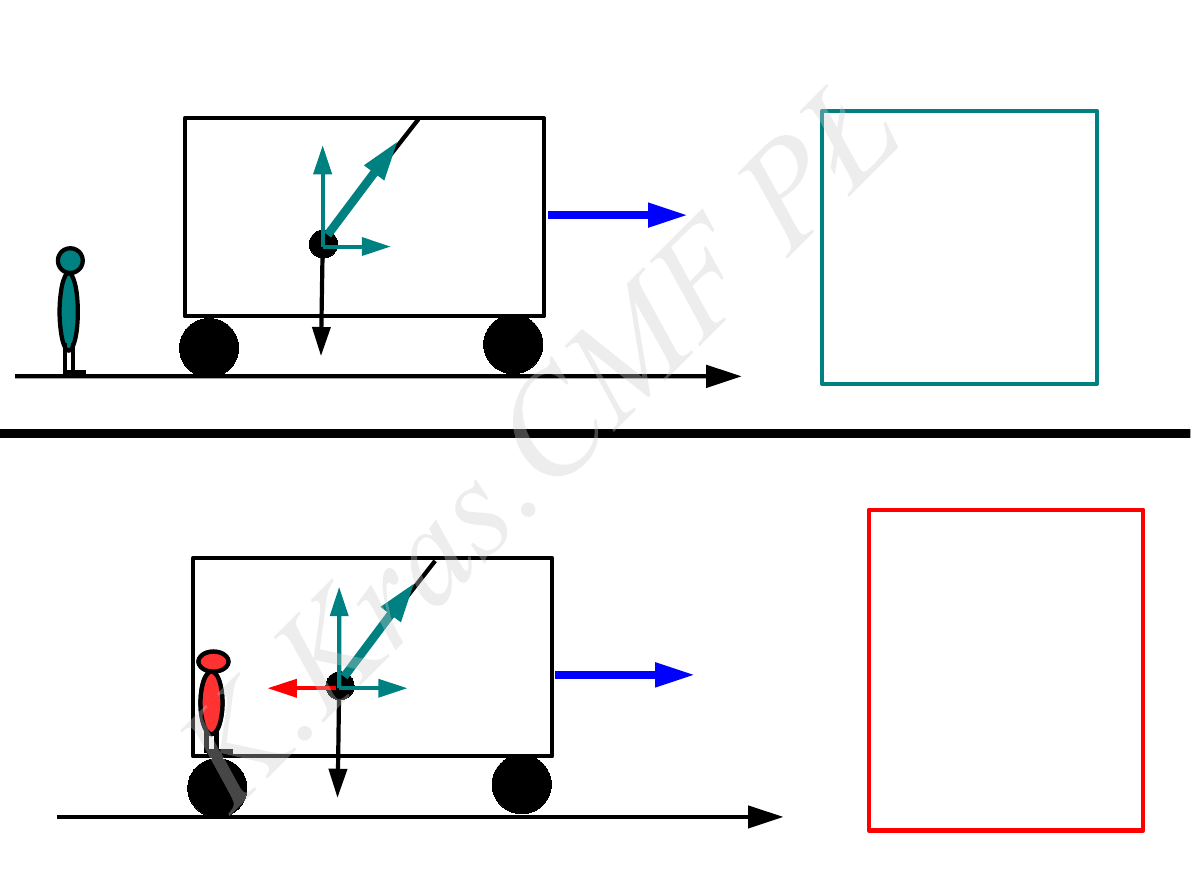
inercjalny
nieinercjalny
⃗
N
x
=
m ⃗
a
w
x
⃗
N
x
− ⃗
B =0
⃗
a
x
=
0
⃗
a
w
x
⃗
mg
⃗
N
⃗
N
x
⃗
mg
⃗
N
⃗
N
x
⃗
B
⃗
a
x
= ⃗
a
w
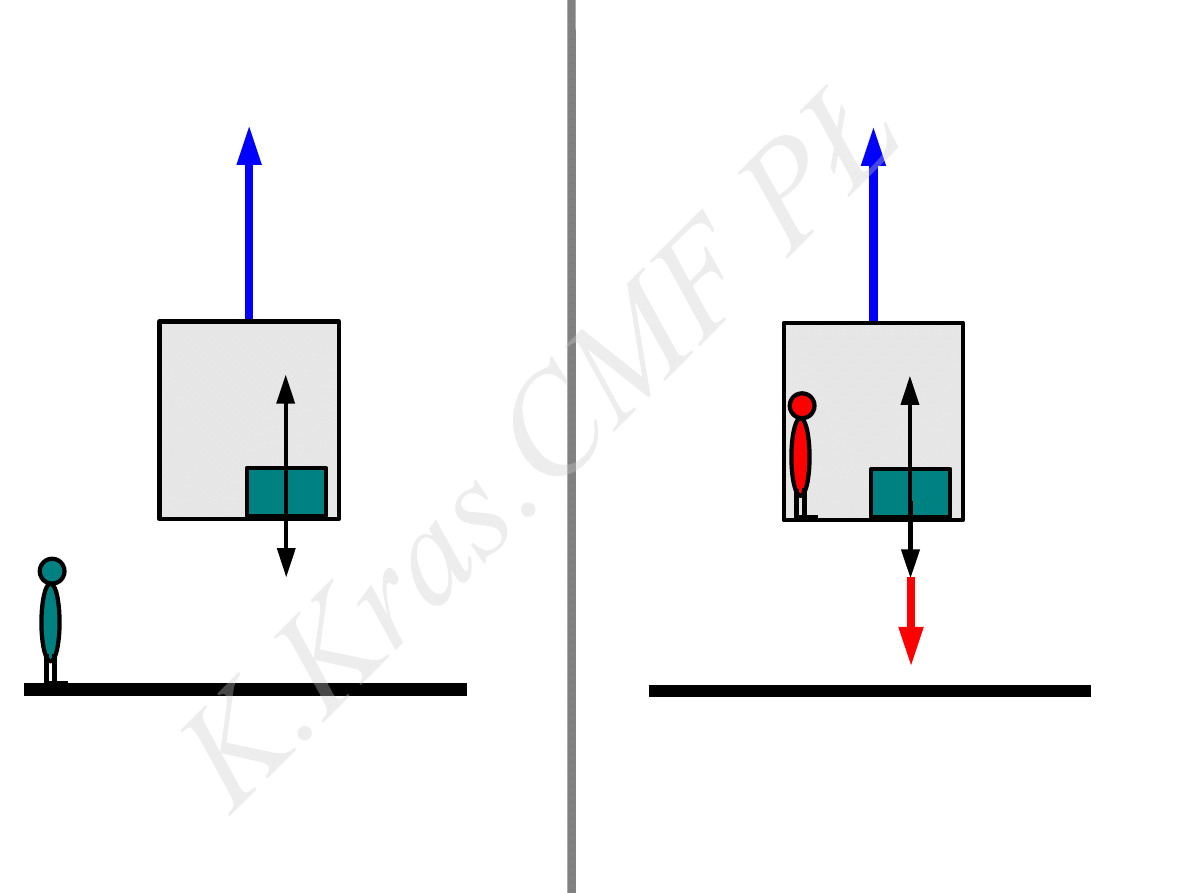
m
⃗
a
w
m ⃗g
R
⃗
a
m
= ⃗
a
w
m
⃗
a
w
m ⃗g
R
⃗
a
m
=
0
⃗
B=m ⃗
a
w
inercjalny
nieinercjalny
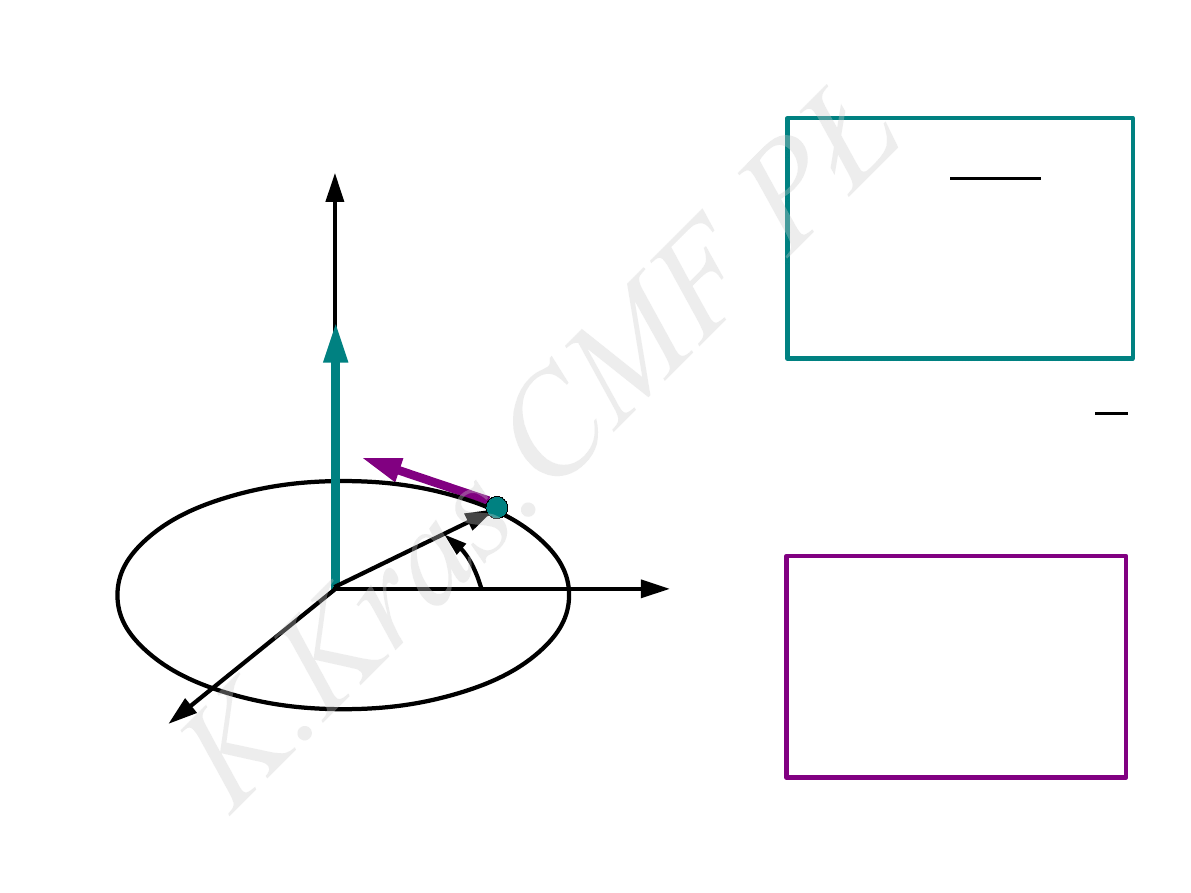
⃗r
⃗
V
⃗
ω
x
z
y
⃗
V = ⃗
ω×⃗r
α
ω =
d α
dt
prędkość kątowa
prędkość liniowa
ω=
const ⇒ ω=α
t
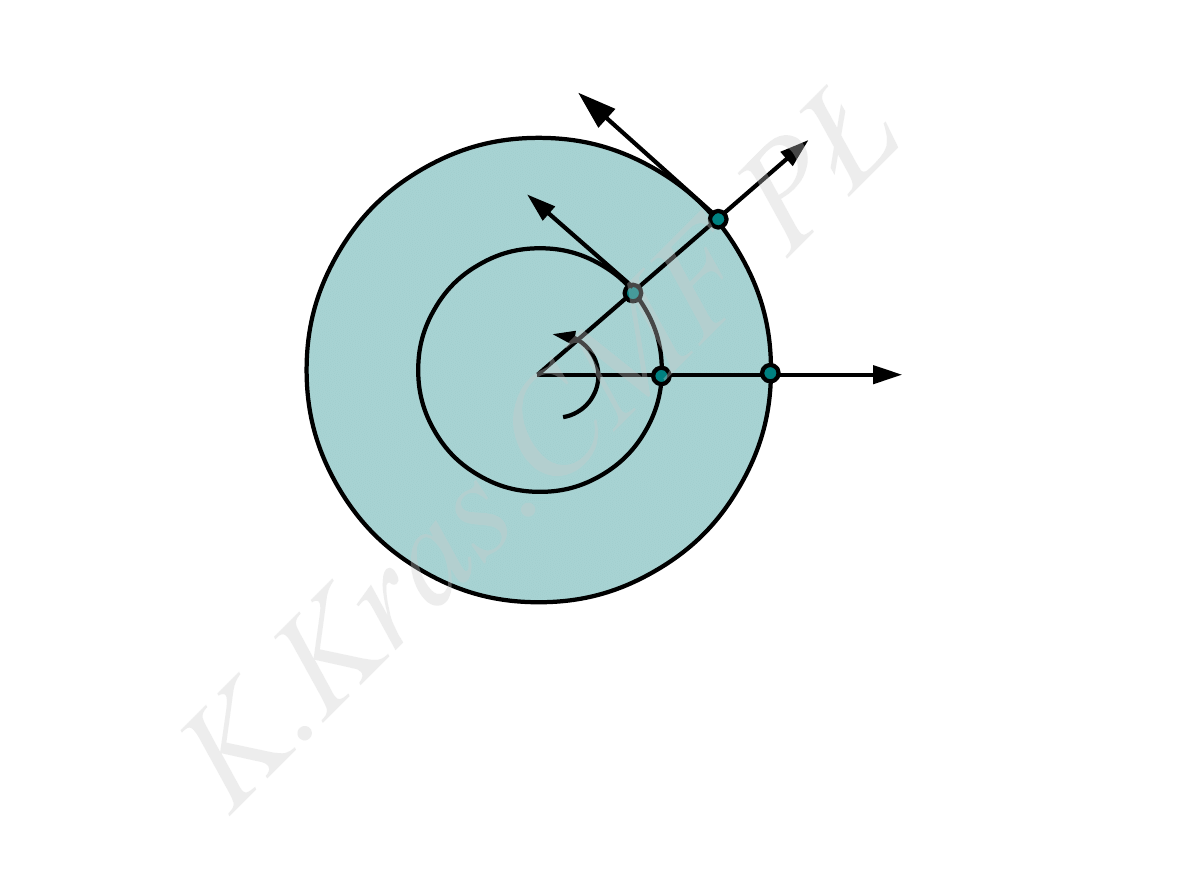
V
1
V
2
V
2
>
V
1
s
1
s
2
s
2
>
s
1
⃗
V = ⃗
ω×⃗r
ω
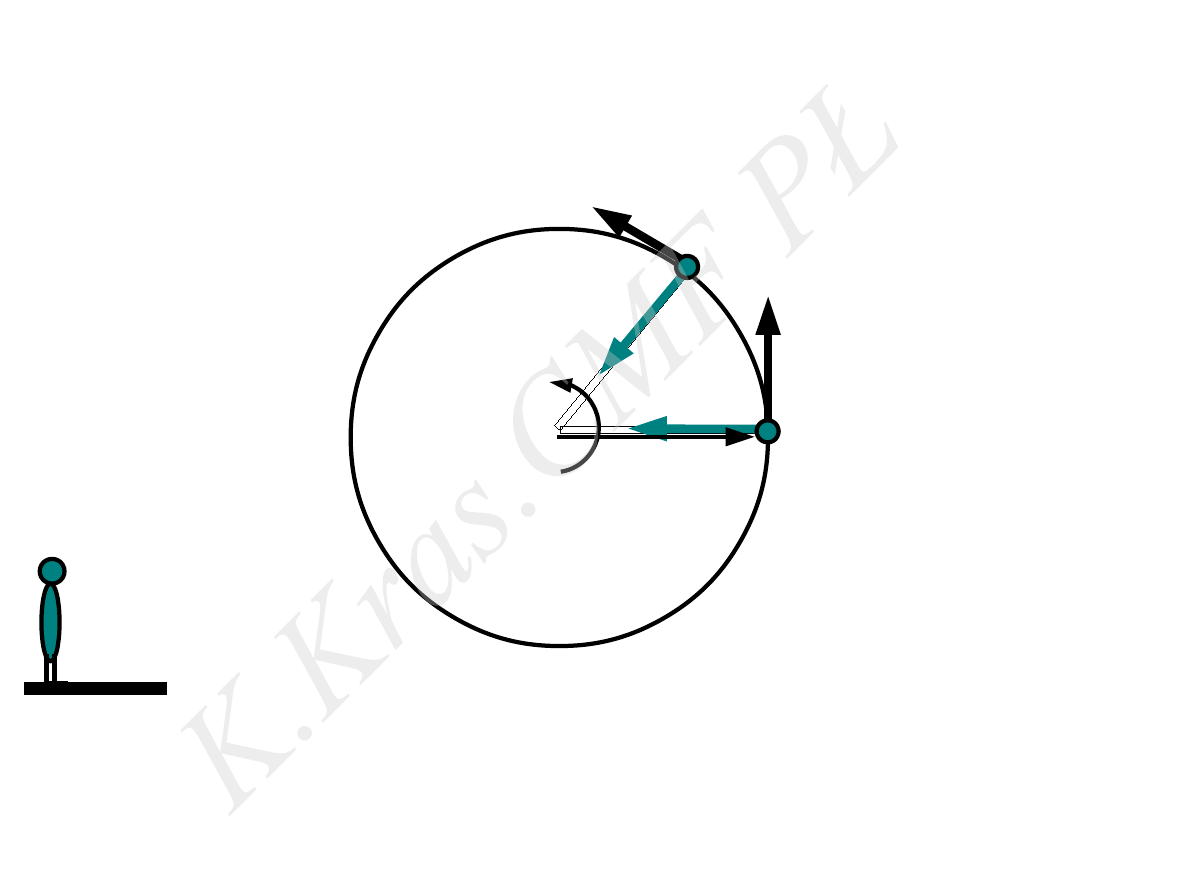
siła dośrodkowa
układ inercjalny
⃗
F
d
⃗
F
d
⃗
V
⃗
V
F
d
=
m ω
2
r
m
m
ω
⃗r
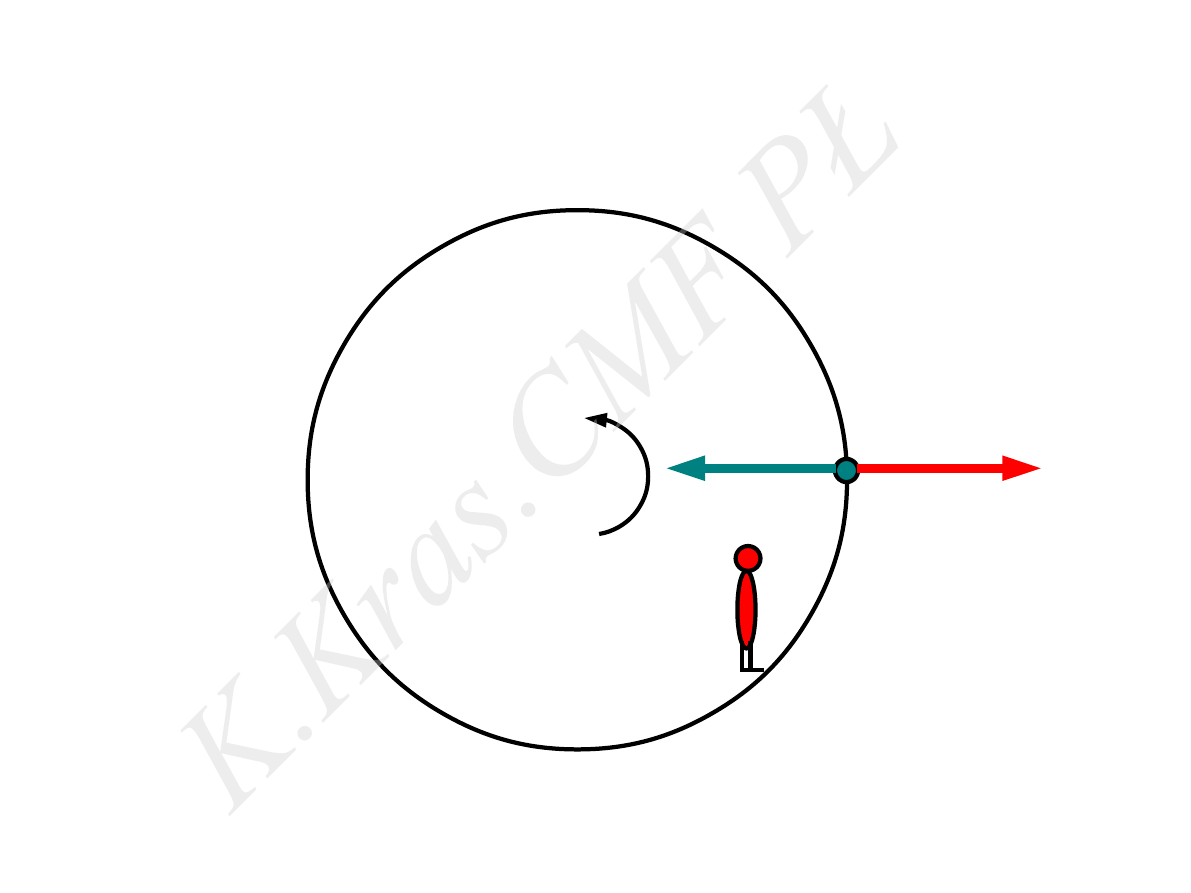
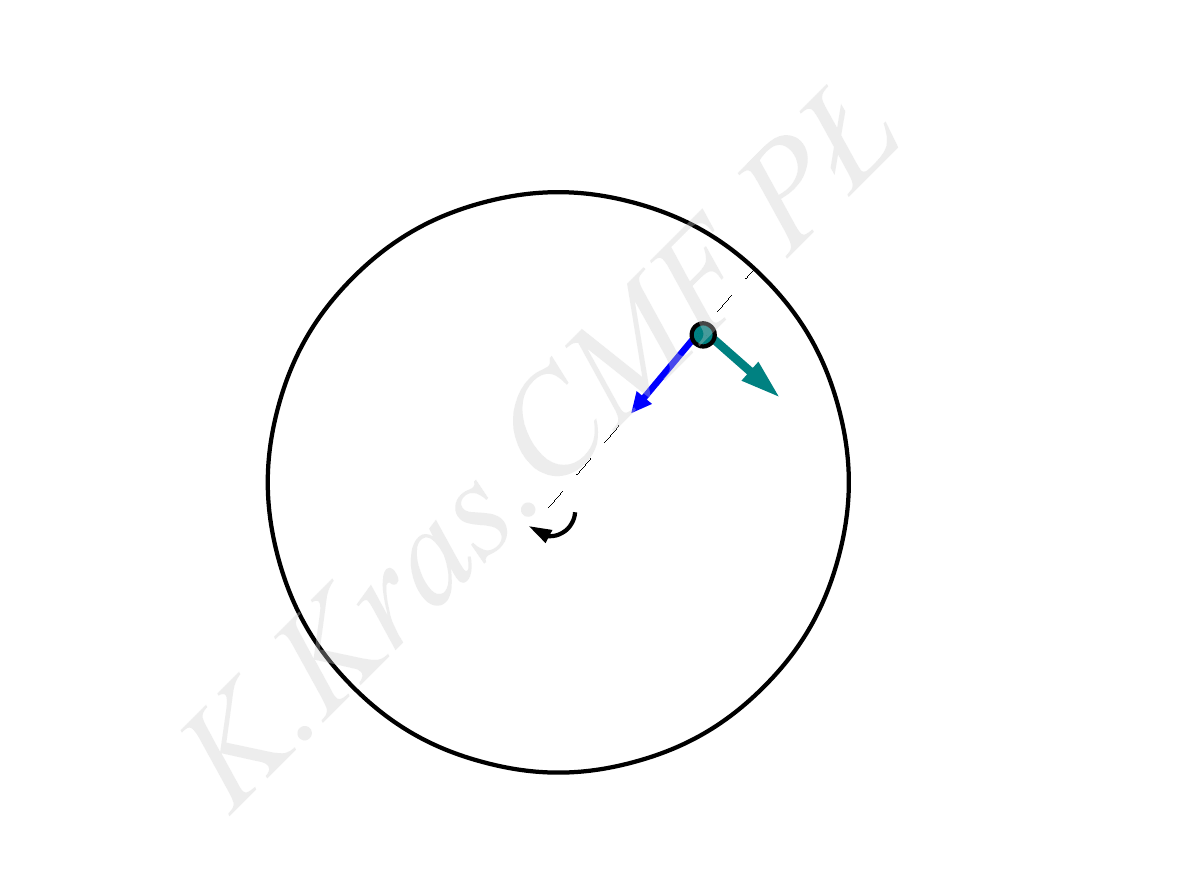
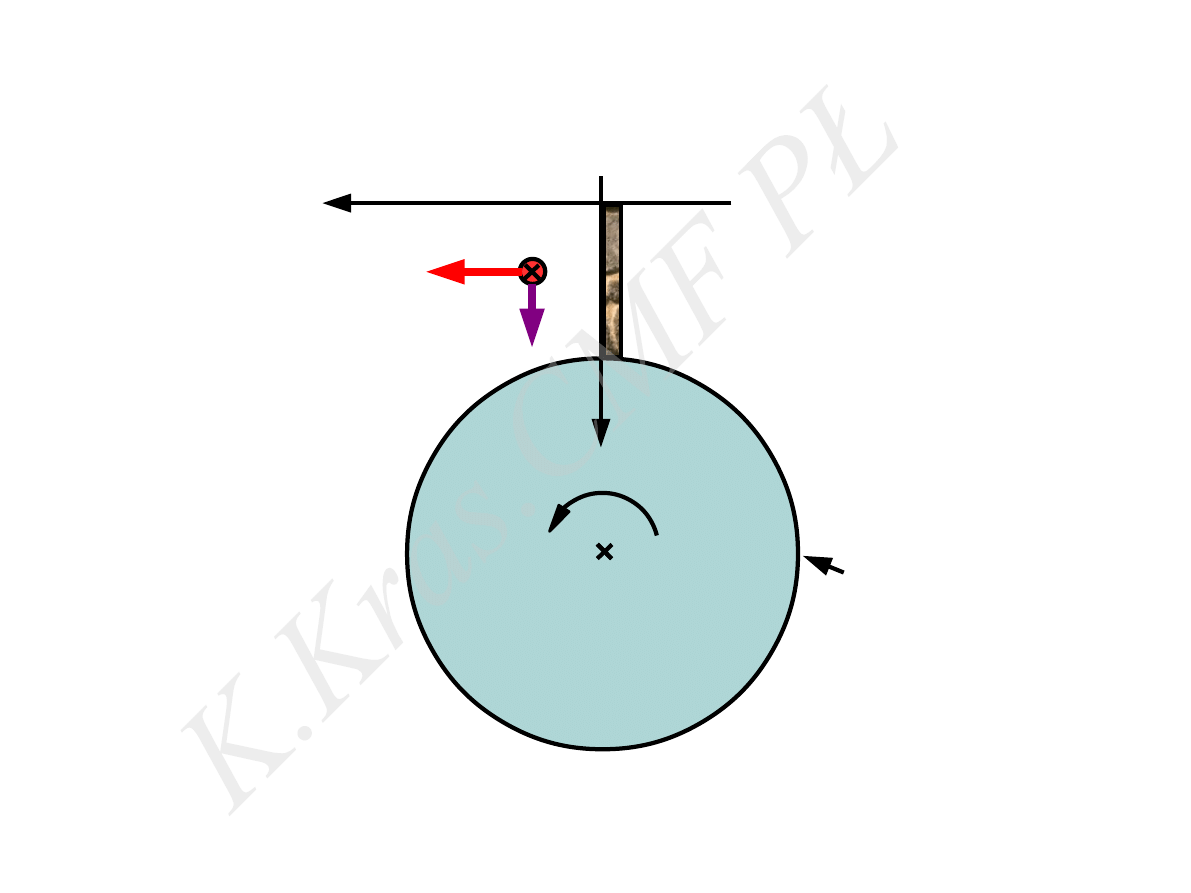
siła dośrodkowa i odśrodkowa
układ nieinercjalny
⃗
F
d
⃗
F
o
ω
⃗
V
⃗
V
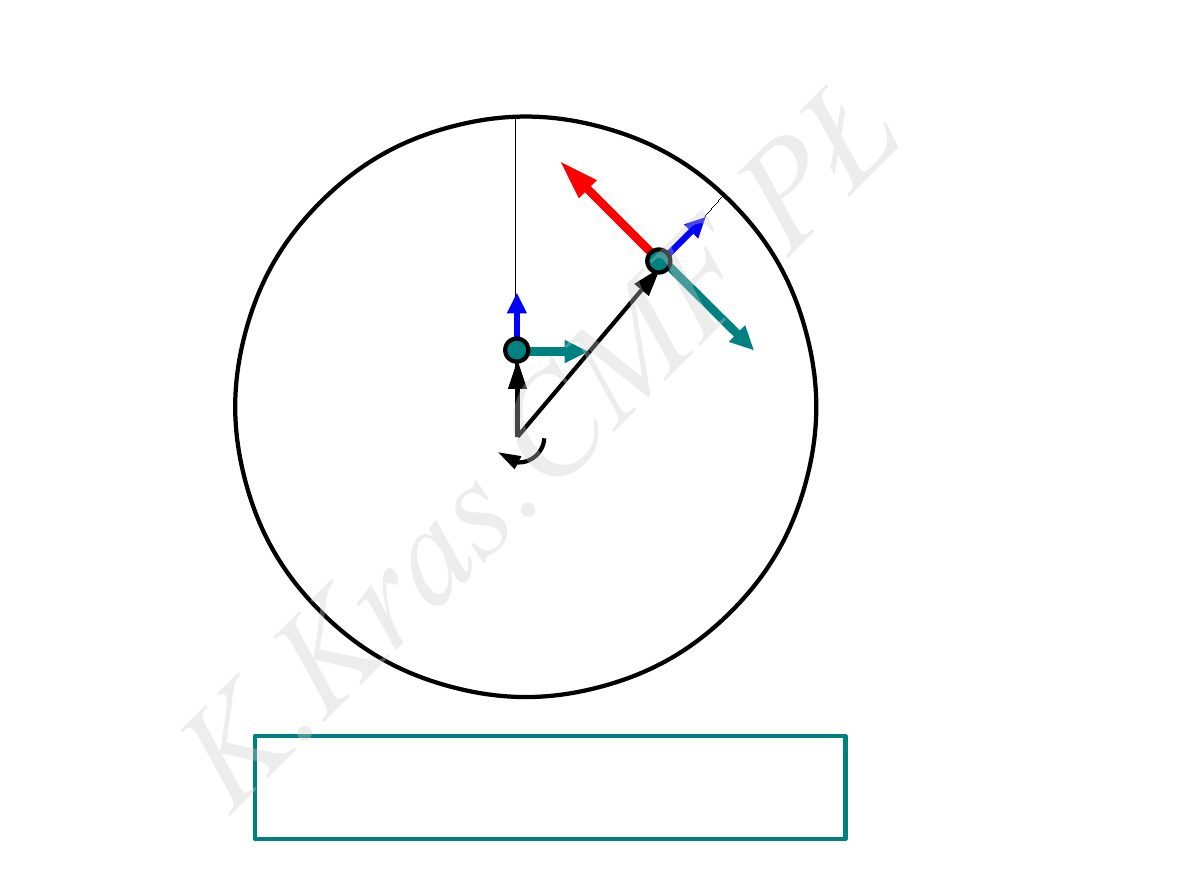
⃗
r
1
a
C
= −
2 ⃗
ω× ⃗
V
⃗
r
2
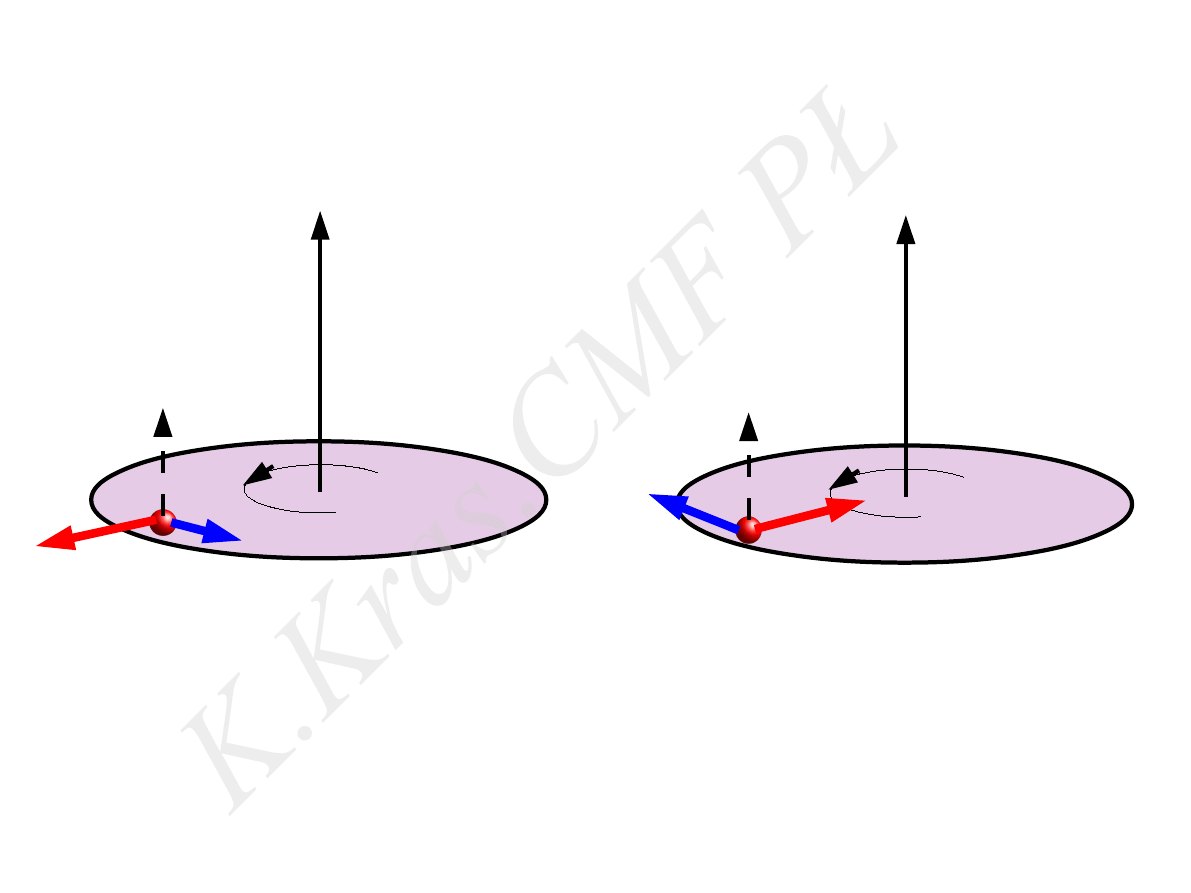
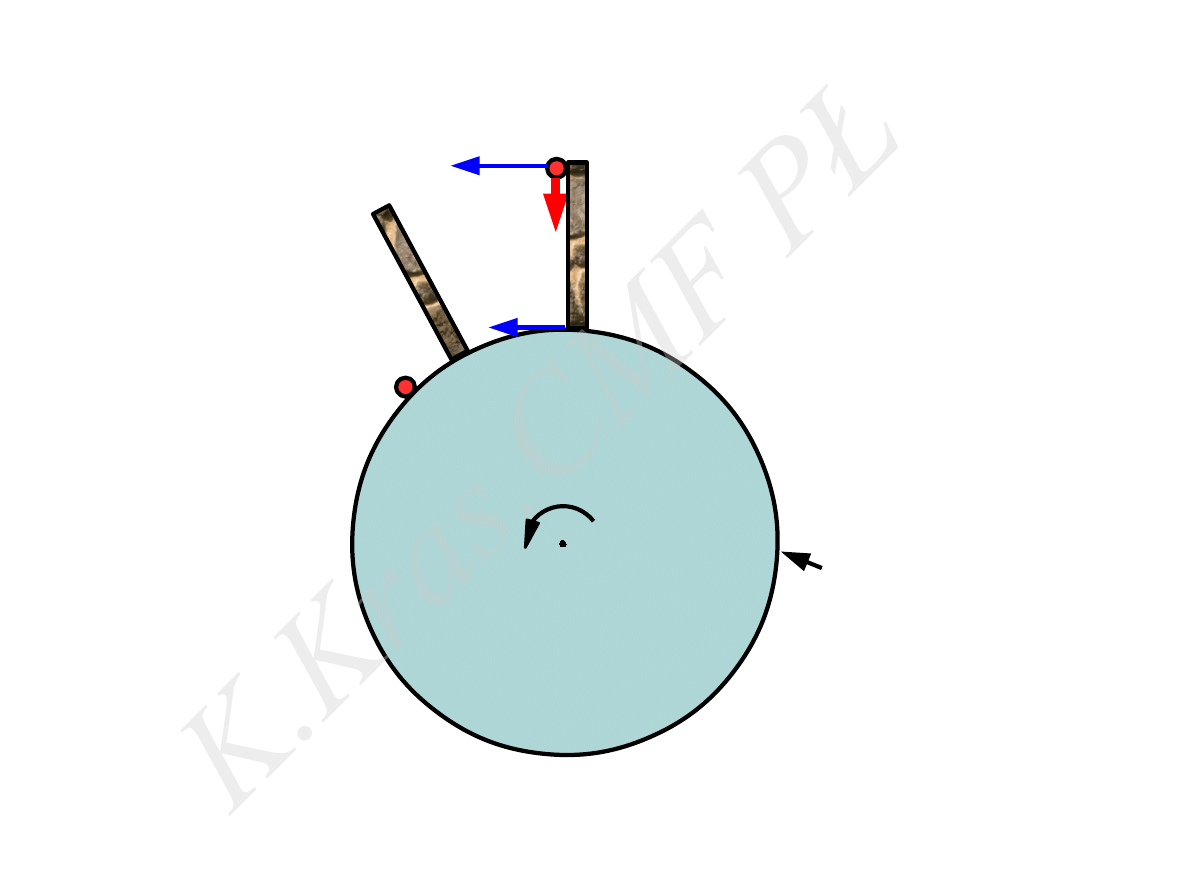
przyspieszenie Coriolisa
–
układ nieinecjalny
ω
r
1
ω
r
2
⃗
a
C
ω
⃗
V
⃗
a
C
ω
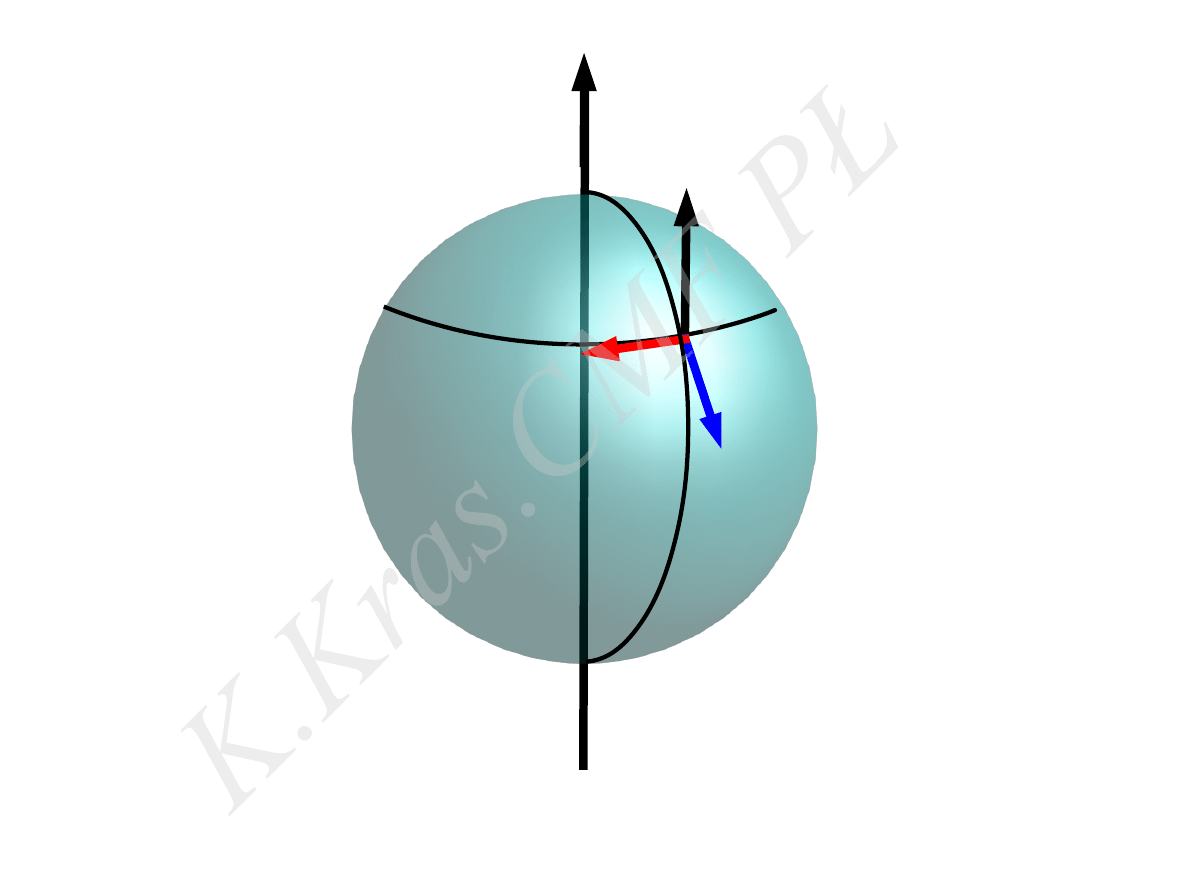
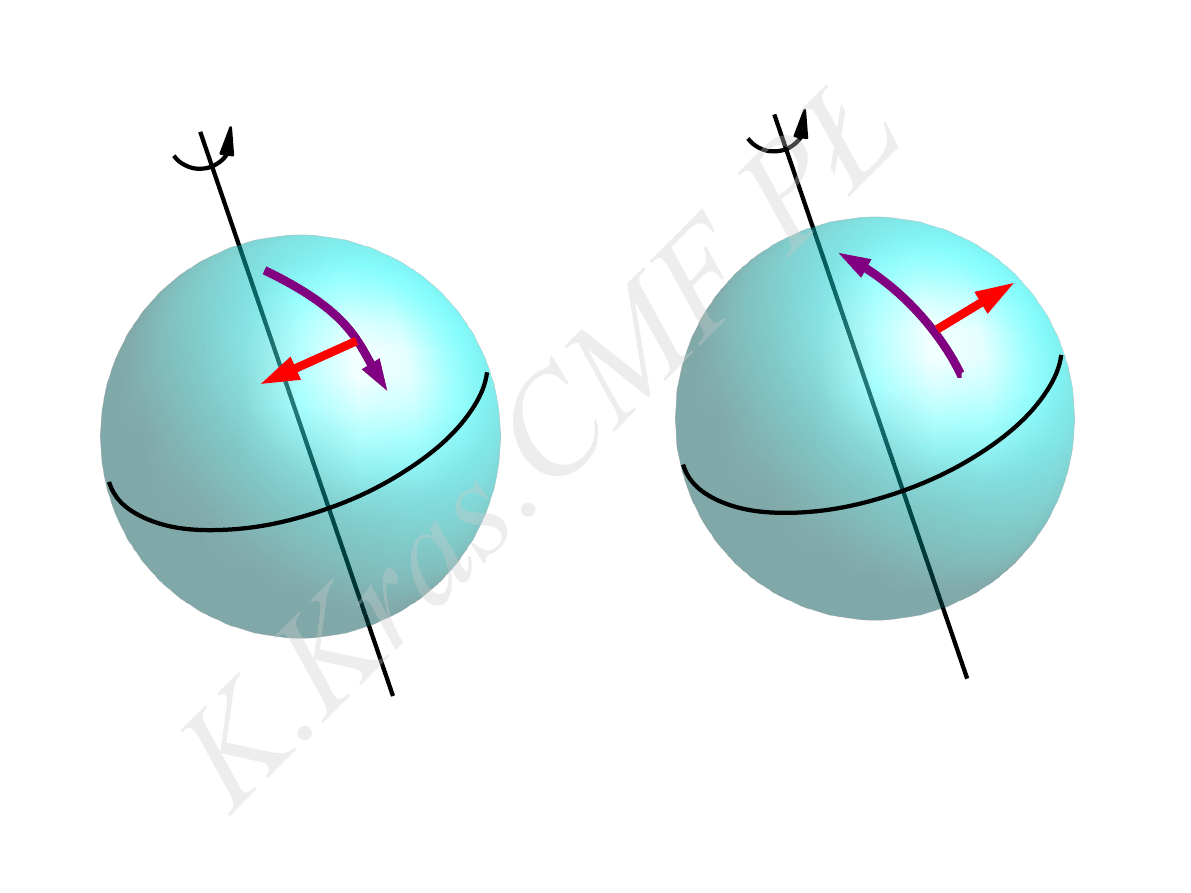
przyspieszenie Coriolisa –
układ nieinecjalny
ω
ω
⃗
V
⃗
F
c
ω
ω
⃗
V
⃗
F
c
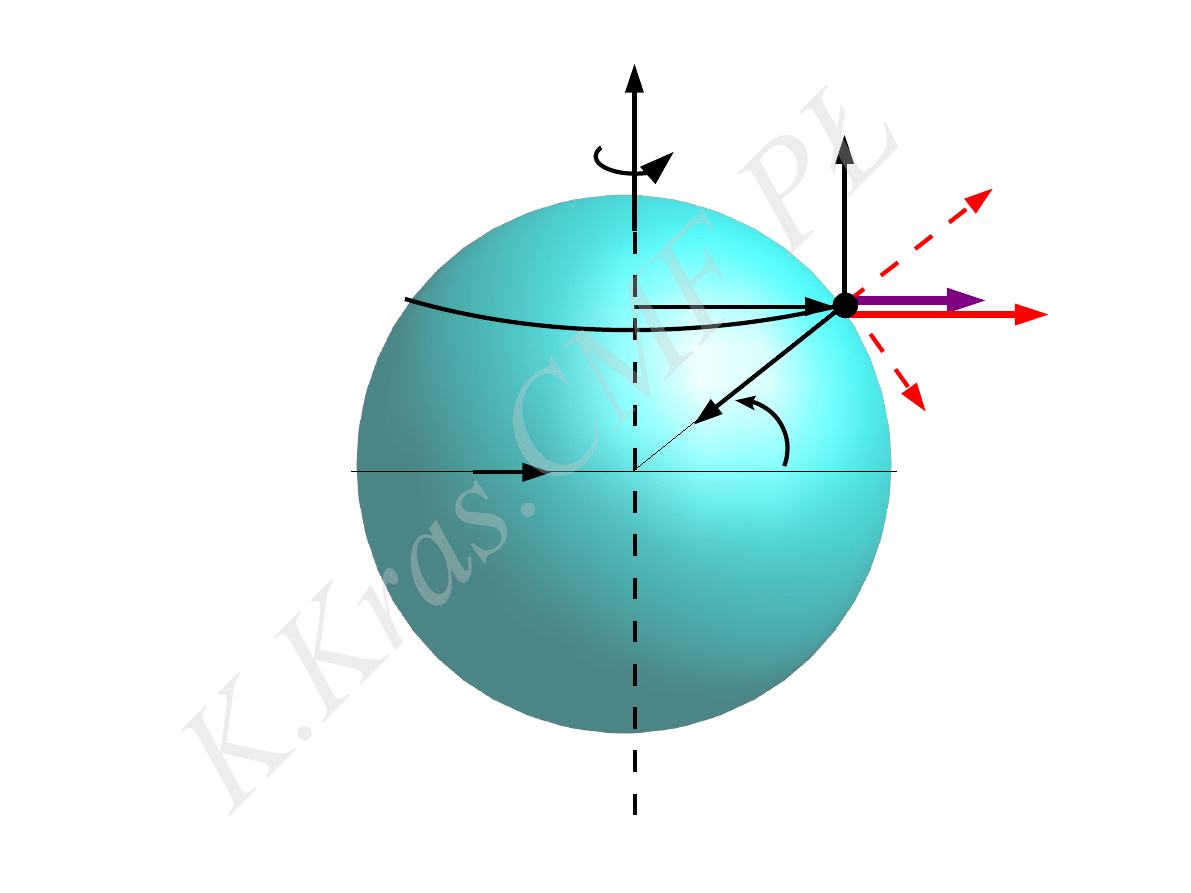
przyspieszenie Coriolisa
–
układ nieinecjalny
⃗
V
ω
ω
⃗
F
c
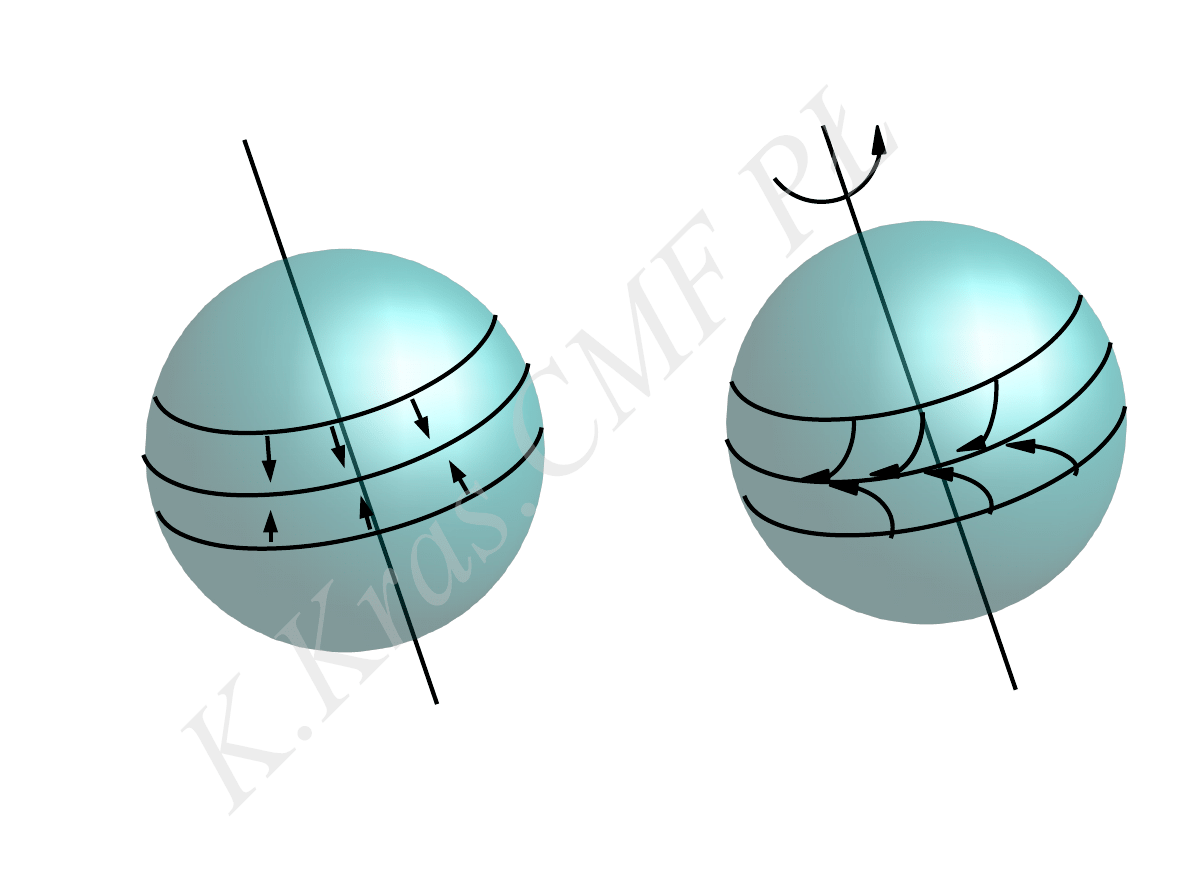
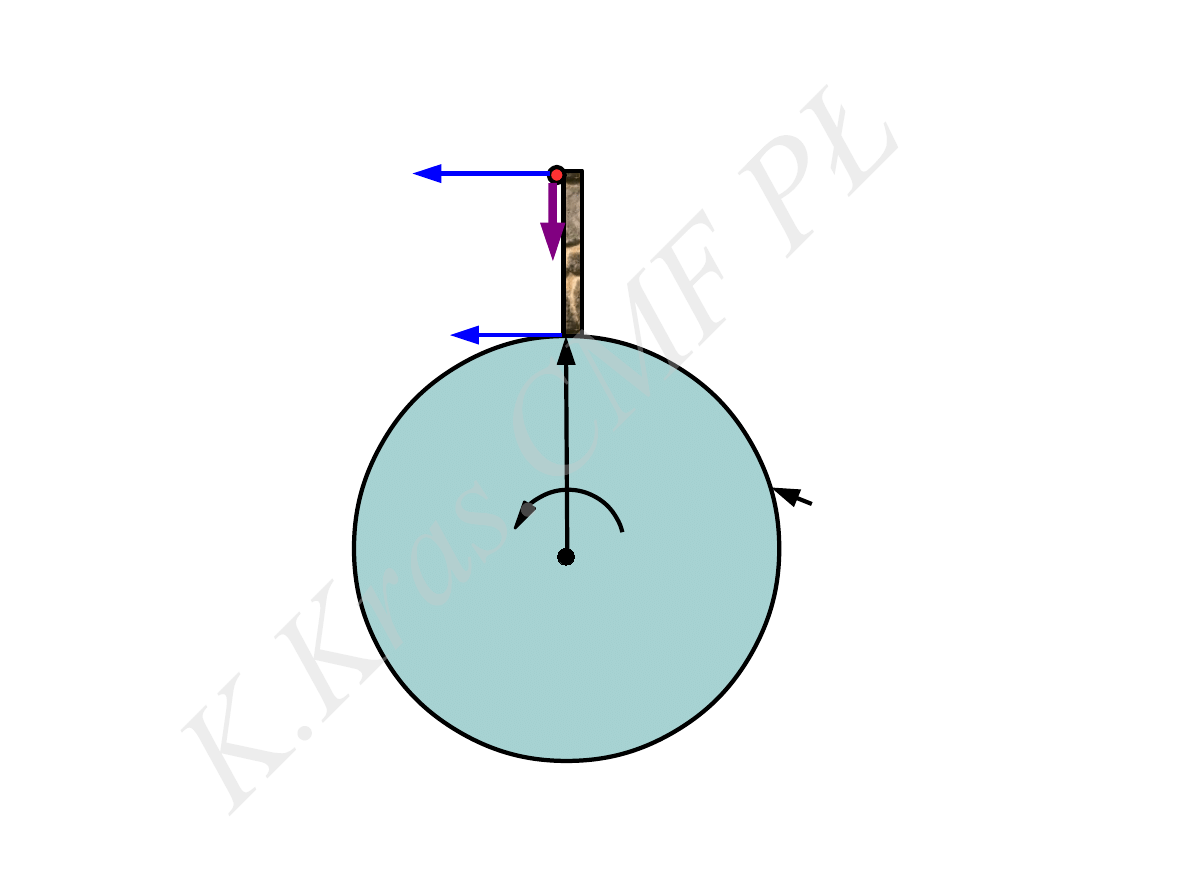
bez obrotu
obrót
⃗
F
c
⃗
F
c
⃗
V
ω
ω
⃗
F
c
ϕ
⃗
ω
⃗
F
O
⃗
V
R
Z
⃗
F
C
⃗
ω
⃗r
⃗
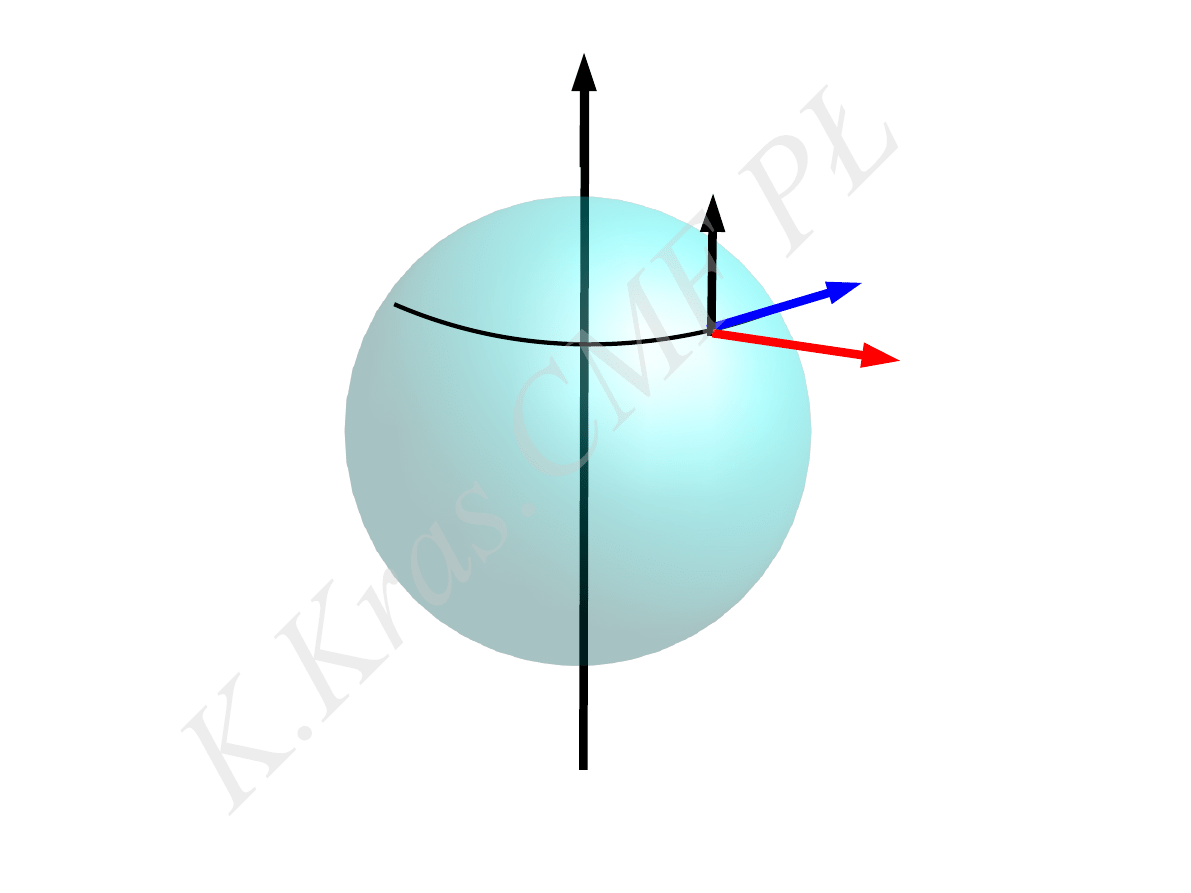
V −za ekran
N
R
h
⃗
V (R)
⃗
V (R+h)
równik
⃗
U
x
Y
U
biegun
N
ω
ω
a
Cx
równik
N
równik
Document Outline
- Slajd 1
- Slajd 2
- Slajd 3
- Slajd 4
- Slajd 5
- Slajd 6
- Slajd 7
- Slajd 8
- Slajd 9
- Slajd 10
- Slajd 11
- Slajd 12
- Slajd 13
- Slajd 14
- Slajd 15
- Slajd 16
- Slajd 17
- Slajd 18
- Slajd 19
Wyszukiwarka
Podobne podstrony:
Materiały do wykładu 4 (27 10 2011)
Materiały do wykładu 4 (28 10 2011)
Materiały do wykładu 3 (20 10 2011)
Materiały do wykładu 2 (13 10 2011)
Materiały do wykładu 4 (27 10 2011)
Materiały do wykładu 4 (28 10 2011)
Materiały do wykładu 7 (18 11 2011)
Materiały do wykładu 7 (17 11 2011)
VAT w działalności gospodarczej Materialy do wykladu - VAT w dzialalnosci - 2011 rok, dostawy krajow
Materialy do wykladu 1 (06 10 2 Nieznany
Materiały do wykładu 6 (04 11 2011)
Materiały do wykładu 5 (03 11 2011)
więcej podobnych podstron