1
Dr hab. inż. Michał LISOWSKI, prof. P.Wr.
michal.lisowski@pwr.wroc.pl
Uwaga: poniższe materiały maja charakter autorski na prawach rękopisu. Ich udostępnianie
bez zgody autora, a także rozpowszechnianie jest prawnie zabronione.
Wykład 3
POMIAR JAKO PROCES PRZETWARZANIA SYGNAÓW
W algorytmie procesu pomiarowego został wyróżniony pomiar właściwy, który
składał się z:
• wyboru przetworników wielkości mierzonej na porównywaną,
• porównania z wzorcem,
• odczytu wyniku pomiaru.
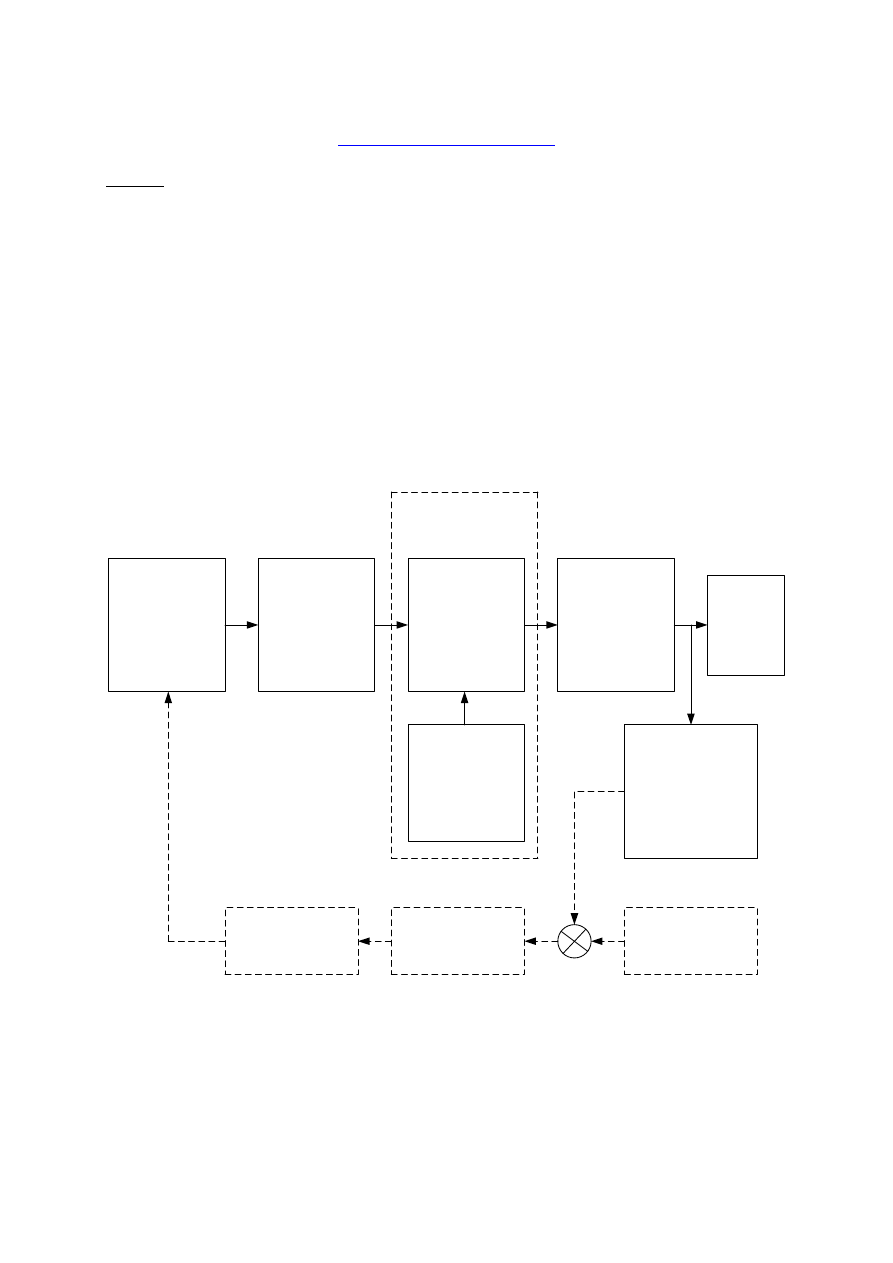
Ten pomiar właściwy należy traktować jako proces przetwarzania sygnałów, którego
schemat pokazano na rys. 3.1.
Obiekt jako
źródło informacji
wielkości
mierzonej
Przetwornik
wielkości
mierzonej na
porównywaną
(czujnik)
Przyrząd
porównujący
Przetwornik
stanu
porównania na
wielkość
obserwowaną
(wskaźnik)
Obserwa-
tor
Wzorzec
wielkości
mierzonej
Przetwornik
pomiarowy
Urządzenie
zbierania danych
(komputer)
Zadajnik
Regulator
Urządzenie
wykonawcze
x
y
z
y
n
Sterowanie
procesem
technologicznym
Rys.3.1. Schemat procesu pomiarowego
W wyniku tego przetwarzania sygnał pomiarowy zmienia zwykle wielokrotnie
zarówno swój charakter fizyczny jak i swoją wartość. W konsekwencji powstają błędy
przetwarzania, czyli zniekształcenia informacji zawartych w sygnale. Przyczyną tego są
właściwości elementów przetworników pomiarowych, które:
2
1) gromadzą część energii w postaci kinetycznej (ruchome masy w układach
elektromechanicznych, indukcyjności w układach elektrycznych, bezwładności cieczy w
układach pneumatycznych i hydraulicznych),
2) gromadzą część energii w postaci potencjalnej (sprężystość w układach mechanicznych,
pojemność w układach elektrycznych, ściśliwość gazów w układach pneumatycznych),
3) powodują straty energetyczne sygnału pomiarowego (tarcie w układach mechanicznych,
rezystancja w układach elektrycznych, opory przepływu gazu i cieczy w układach
pneumatycznych i hydraulicznych).
Jeżeli wielkości mierzone są niezależne od czasu, czyli gdy nastąpiło już ustalenie się
sygnału, np. po włączeniu układu pomiarowego lub po zmianie sygnału pomiarowego, to
mamy doczynienie z pomiarami statycznymi. Natomiast gdy wielkość mierzona zmienia się
tak szybko, że sygnał wyjściowy przetwornika nie nadąża za sygnałem wejściowym mówimy
o pomiarach dynamicznych. Stad też i błędy przetwarzania sygnału dzielimy na:
• statyczne i
• dynamiczne.
W warunkach dynamicznych w przetwarzaniu sygnałów należy uwzględnić czas i
przetwornik schematycznie przedstawia się w postaci pokazanej na rys. 3.2.
Rys. 3.2. Przetwornik pomiarowy w warunkach dynamicznych
Statyczne właściwości przetworników pomiarowych
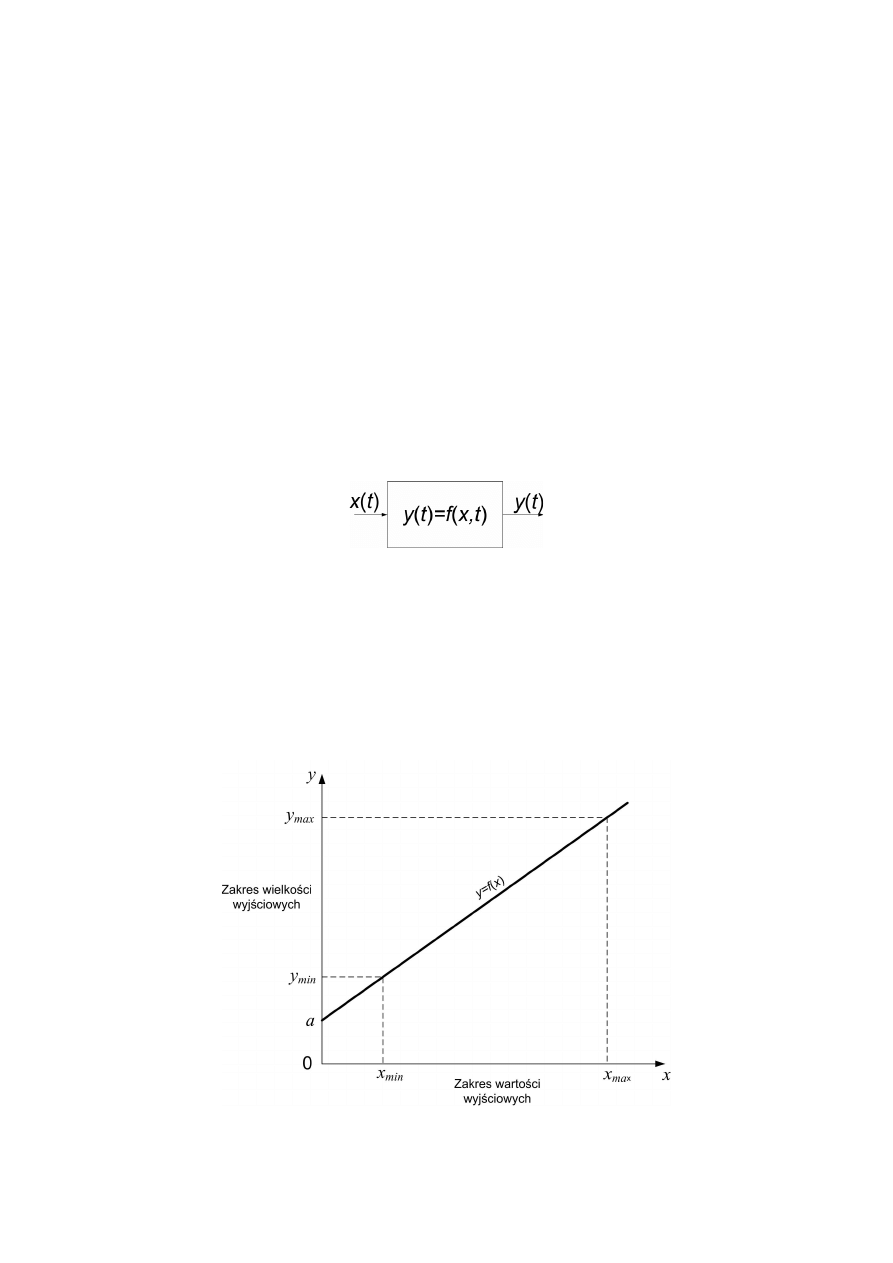
Charakterystyka przetwornika y = f(x) może mieć charakter:
• liniowy – przetwarzanie liniowe (rys. 3.3),
• nieliniowy – przetwarzanie nieliniowe.
Rys. 3.3. Charakterystyka przetwornika liniowego
3
Najczęściej stosuje się przetworniki o charakterystyce liniowej (rys. 3.3):
y = Sx + a ,
gdzie: a jest przesunięciem charakterystyki w stosunku do początku układu współrzędnych,
S – czułością przetwornika zdefiniowaną wzorem:
min
max
min
max
x
x
y
y
x
y
S
−
−
=
=
d
d
.
Odwrotność czułości jest stałą przetwarzania:
S
c
1
=
.
Najczęściej a = 0 oraz często x
min
= 0 i y
min
= 0. Wówczas x = cy.
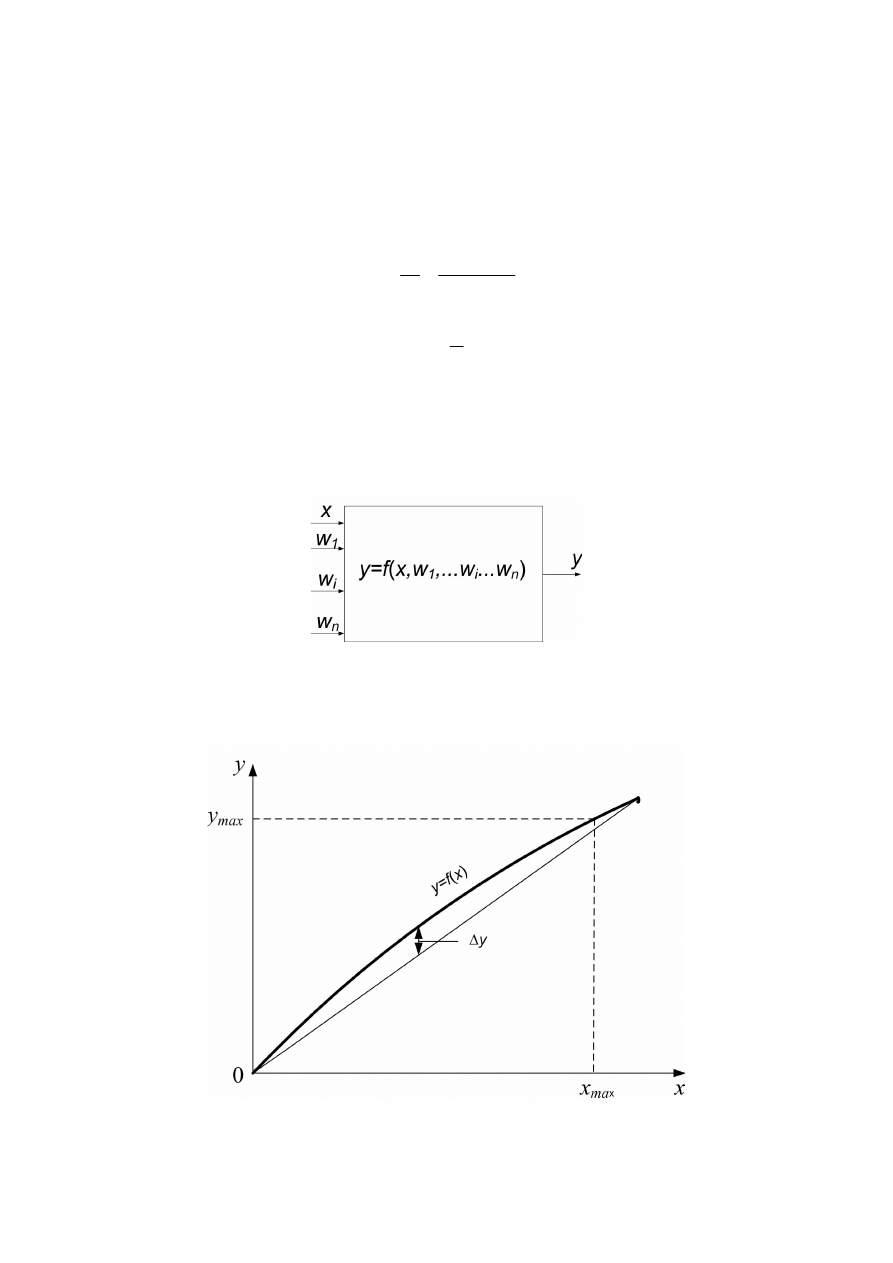
W rzeczywistości sygnał wyjściowy jest funkcją nie tylko sygnału mierzonego x, ale
także wielu wielkości zakłócających w
1
÷
w
n
, czyli y = f(x, w
1
÷
w
n
). Schemat takiego
przetwornika pokazano na rys. 3.4.
Rys. 3. 4. Przetwornik rzeczywisty reagujący na sygnały zakłócające
Przetwornik może mieć charakterystykę odbiegającą od liniowej. Jego nieliniowość
przetwarzania charakteryzuje błąd przetwarzania ∆y (rys. 3.5).
Rys. 3.5. Nieliniowość przetwarzania
4
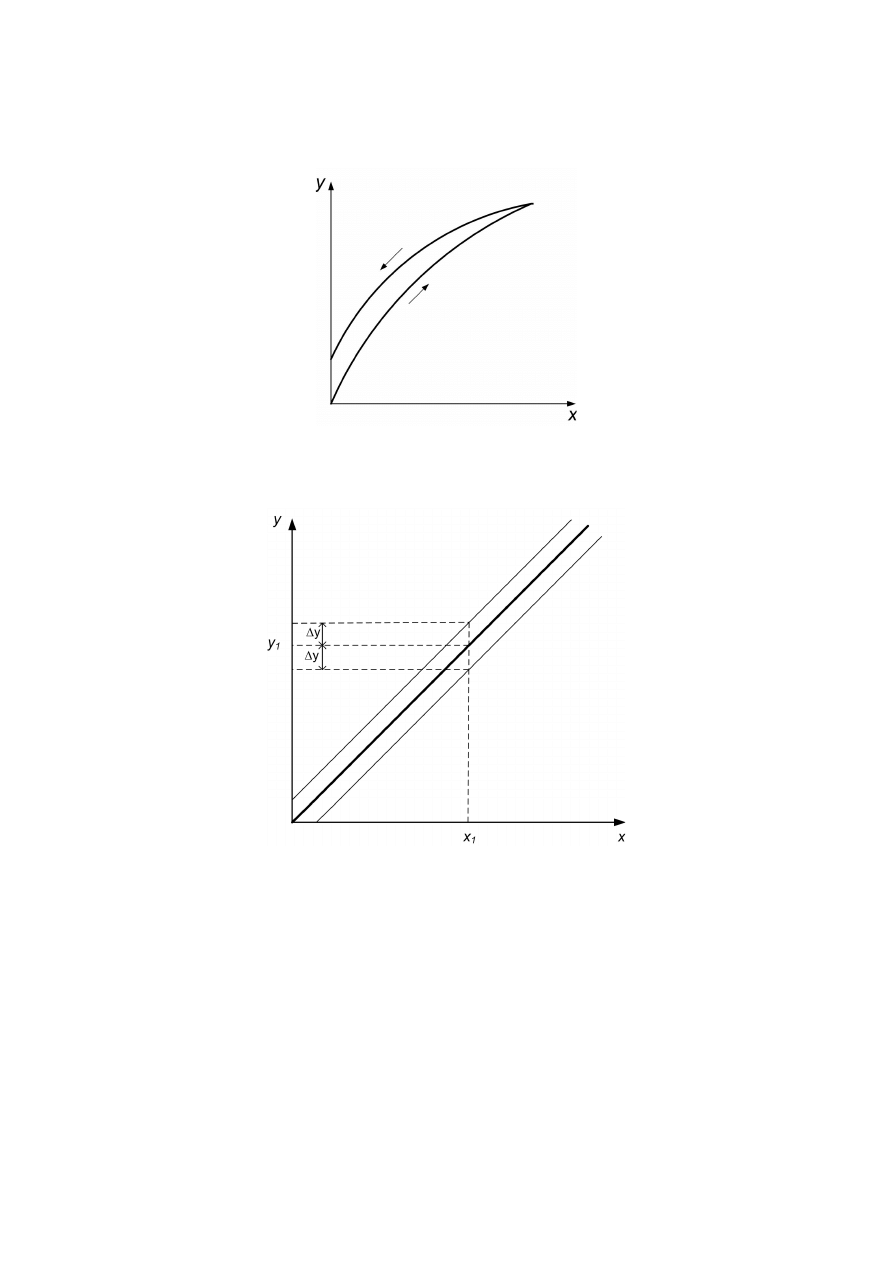
Przetwornik może mieć inną charakterystykę dla sygnały rosnącego i inną dla sygnału
malejącego, czyli mieć histerezę (rys. 3.6).
Rys. 3.6. Histereza przetwornika
Najważniejszym parametrem przetworników jest niedokładność przetwarzania (rys.
3.7).
Rys.3.7. Niedokładność przetwarzania
Jednej wartości sygnału wejściowego x
1
może odpowiadać pomiarowy wyjściowy sygnał y
1p
przedziału
y
y
y
y
y
w
∆
+
≤
≤
∆
−
1
1
1
.
METODY POMIAROWE
Metoda pomiarowa określa sposób realizacji pomiaru. Można je podzielić według:
1) sposobu przetwarzania sygnału,
2) sposobu uzyskiwania wyników,
3) sposobu porównania realizowanego w czasie procesu pomiarowego,
5
Ze względu na sposób przetwarzania sygnału metody pomiarowe dzielimy na:
1) bezpośredniego porównania,
2) pośredniego porównania,
3) różnicowe.
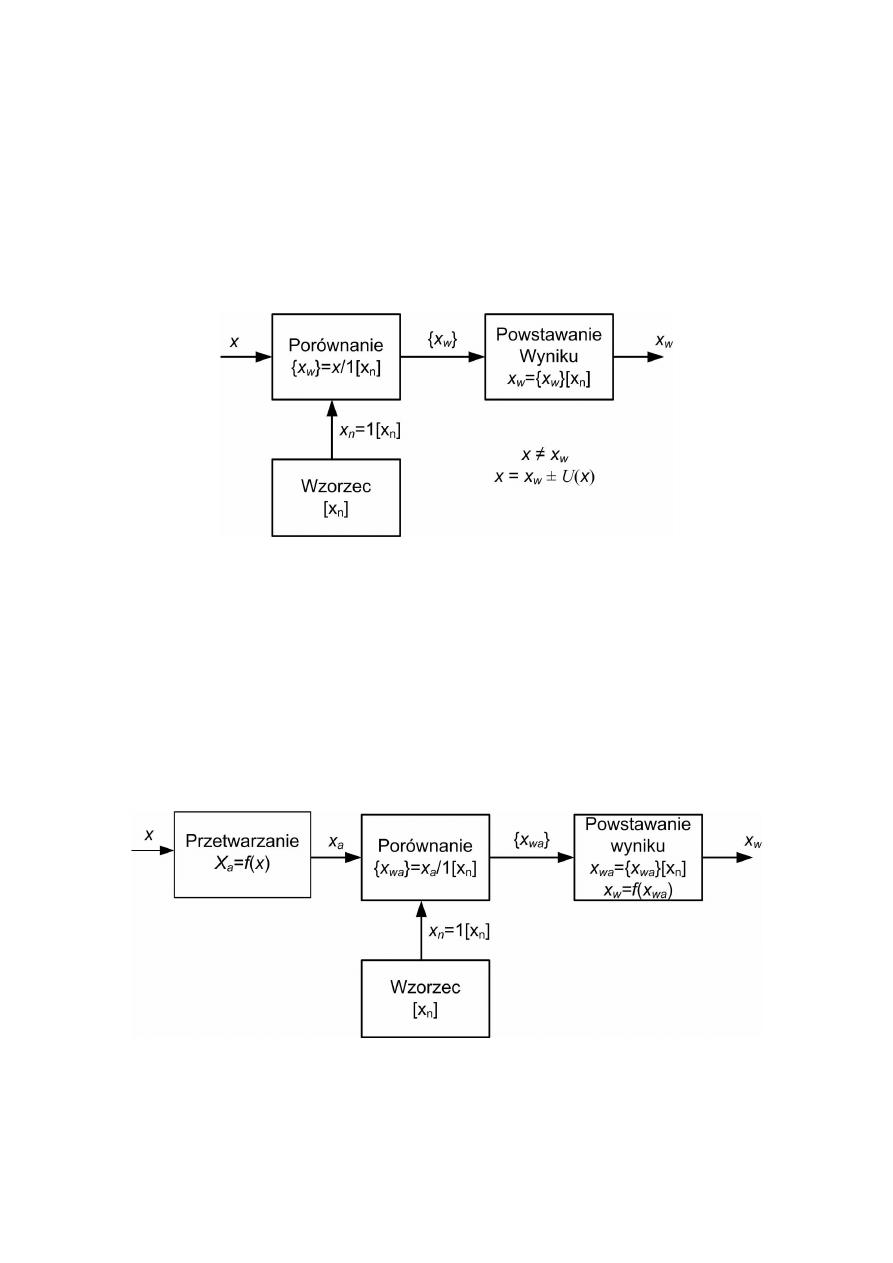
Metody bezpośredniego porównania
Łańcuch pomiarowy jest tu najkrótszy (rys. 3.8), co zapewnia największa dokładność
pomiarów. Przykładem może być pomiar długości przymiarem liniowym.
Rys. 3.8. Metoda bezpośredniego porównania
Otrzymany wynik pomiaru x
w
różni się od wartości rzeczywistej (prawdziwej) x, która
występuje w przedziale
( )
( )
x
U
x
x
x
U
x
w
w
+
≤
≤
−
.
Metody pośredniego porównania
Następuje tu przetworzenie wartości wielkości mierzonej na wartość innej wielkości
porównywanej z odpowiednim wzorcem jednostki miary (rys. 3.9). Tak realizowana jest
większość pomiarów.
Rys. 3.9. Metoda pośredniego przetwarzania
6
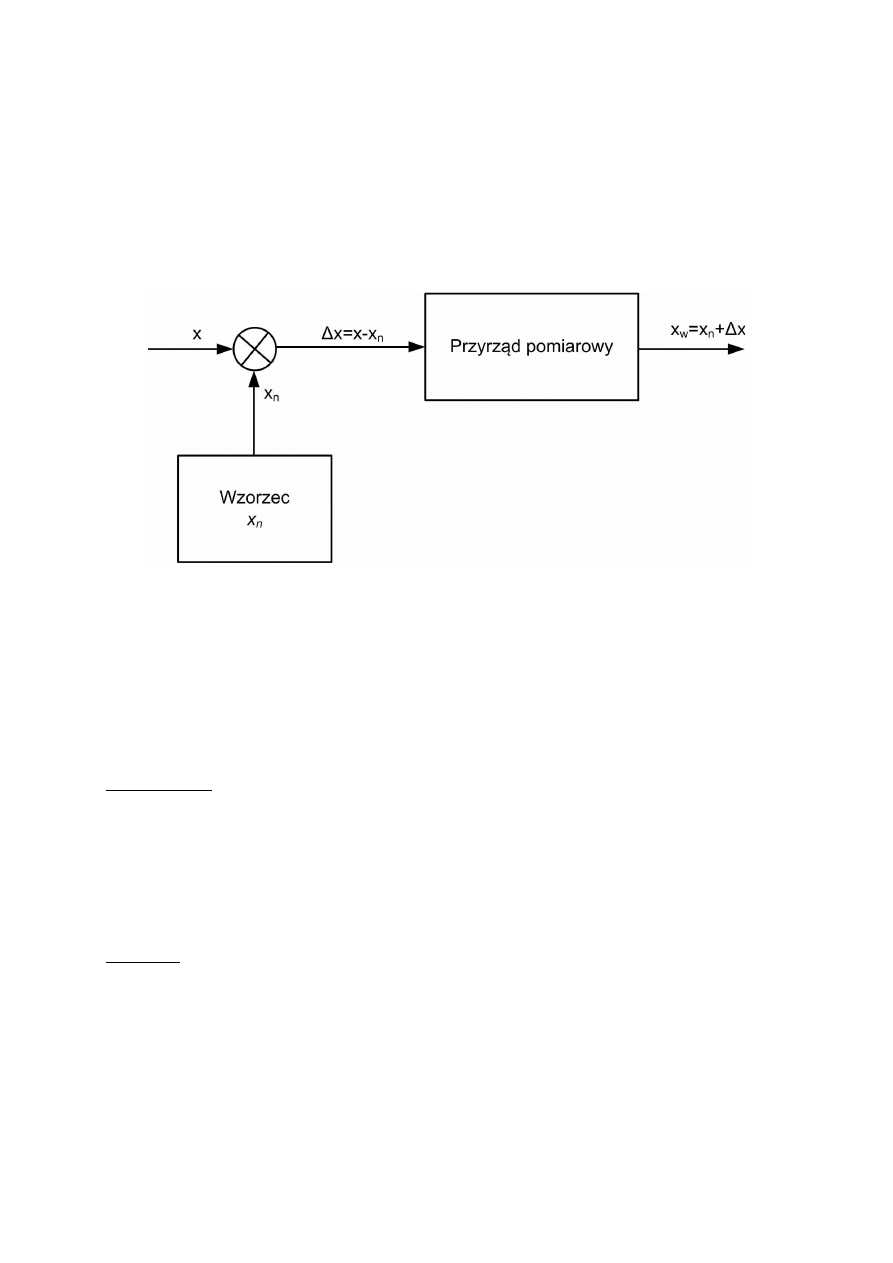
Metody różnicowe
W metodach bezpośredniego porównania teoretycznie wielkość mierzona x jest równa
wielkości wzorcowej x
n
i różnica tych wielkości jest równa 0. Tę metodę w bardzo
dokładnych pomiarach trudno jest zrealizować, gdyż wymaga zastosowania wzorca
regulowanego z taką precyzją aby wartość wielości wzorcowej była równa wartości wielkości
mierzonej. Z tego względu w pomiarach, w których wymaga się dużej dokładności,
najczęściej stosuje się metodę różnicową (rys. 3.10).
Rys. 3.10. Metoda różnicowa
Dokładność pomiaru metodą różnicową jest tym większa im mniejsza jest różnica ∆x.
Ze względu na sposobu uzyskiwania wyników metody pomiarowe dzielimy na:
1) proste (bezośrednie),
2) złożone (pośrednia).
W metodach prostych wynik pomiaru x
w
jest identyczny w sensie fizycznym z wielkością
mierzoną x i jest funkcją jednej wielkości (x ≅ x
w
).
Przykłady:
- pomiar masy wagą,
- pomiar napięcia woltomierzem.
W metodach złożonych (pośrednich) wynik pomiaru y jest funkcją wielu wielkości
mierzonych bezpośrednio. Oblicza się go ze złożonych funkcji:
(
)
wn
wi
w
w
w
x
x
x
x
f
y
y
...
...
,
2
1
=
≅
.
Przykład: Pomiar rezystancji metoda pośrednią przez pomiar prądu płynącego przez mierzony
rezystor i napięcia na tym rezystorze. Wynik pomiaru rezystancji oblicza się ze wzoru
R = U/I.
Ze względu na sposób porównania realizowanego w czasie procesu pomiarowego
metody pomiarowe dzielimy na:
1) zerowe,
2) wychyleniowe i cyfrowe,
3) koincydencyjne.

7
Metody zerowe
Metody te polegają na sprowadzeniu do zera (w rzeczywistości do progu nieczułości
detektora) różnicy między wartością mierzoną x i wzorcową x
n
. Jeżeli różnica
∆x = x – x
n
,
to
x
w
≅ x = x
n
.
Metody wychyleniowe i cyfrowe
Wartość wyniku uzyskuje się tu bezpośrednio ze wskazań przyrządów pomiarowych
analogowych (wychylenie wskazówki na skali przyrządu) i cyfrowych (wyświetlone cyfry na
polu cyfrowym).
Metody koincydencyjne
Pomiar polega tu na koincydencji pewnych wskazań lub sygnałów małej różnicy
między wartością mierzoną x i wartością wzorcową x
n
. Przykład: sposób pomiaru długości
suwmiarka z noniuszem.
Wyszukiwarka
Podobne podstrony:
Zadanie z pasowania otwarte, PWR Politechnika Wrocławska, podstawy metrologii, Wykłady 2011
Struktura źródeł błędów w procesie pomiarowym, PWR Politechnika Wrocławska, podstawy metrologii, Wyk
Podstawy metrologii Wykład 4bBRAKNOTATEK
Błędy przypadkowe Metoda pośrednia, PWR Politechnika Wrocławska, podstawy metrologii, Wykłady 2011
Podstawy metrologii Wykład 4a
Przedrostki stosowane do oznaczenia wielokrotności jednostek, PWR Politechnika Wrocławska, podstawy
Podstawy metrologii Wykład 5
Podstawy metrologii Wykład 2
MWG Program wykładu, PWR Politechnika Wrocławska, podstawy metrologii, WYKŁADY
Podstawy metrologii wykład 1
Pracownia Metrologii i Badań Jakości, PWR Politechnika Wrocławska, podstawy metrologii, Wykłady 2011
KLASYFIKACJA BŁĘDÓW a1x, PWR Politechnika Wrocławska, podstawy metrologii, Wykłady 2011
Dyrektywa dot pomiarow, PWR Politechnika Wrocławska, podstawy metrologii, Wykłady 2011
Podstawy metrologii Wykład 1
KLASYFIKACJA PRZYRZADÓW POMIAROWYCH I WZORCÓW MIAR DO POMIARU DŁUGOŚCI, PWR Politechnika Wrocławska,
więcej podobnych podstron