1
Dr hab. inż. Michał LISOWSKI, prof. P.Wr.
michal.lisowski@pwr.wroc.pl
Uwaga: poniższe materiały maja charakter autorski na prawach rękopisu. Ich udostępnianie
bez zgody autora, a także rozpowszechnianie jest prawnie zabronione.
Wykład 4b
ZASADA DZIAŁANIA MIERNIKA MAGNETOELEKTRYCZNEGO
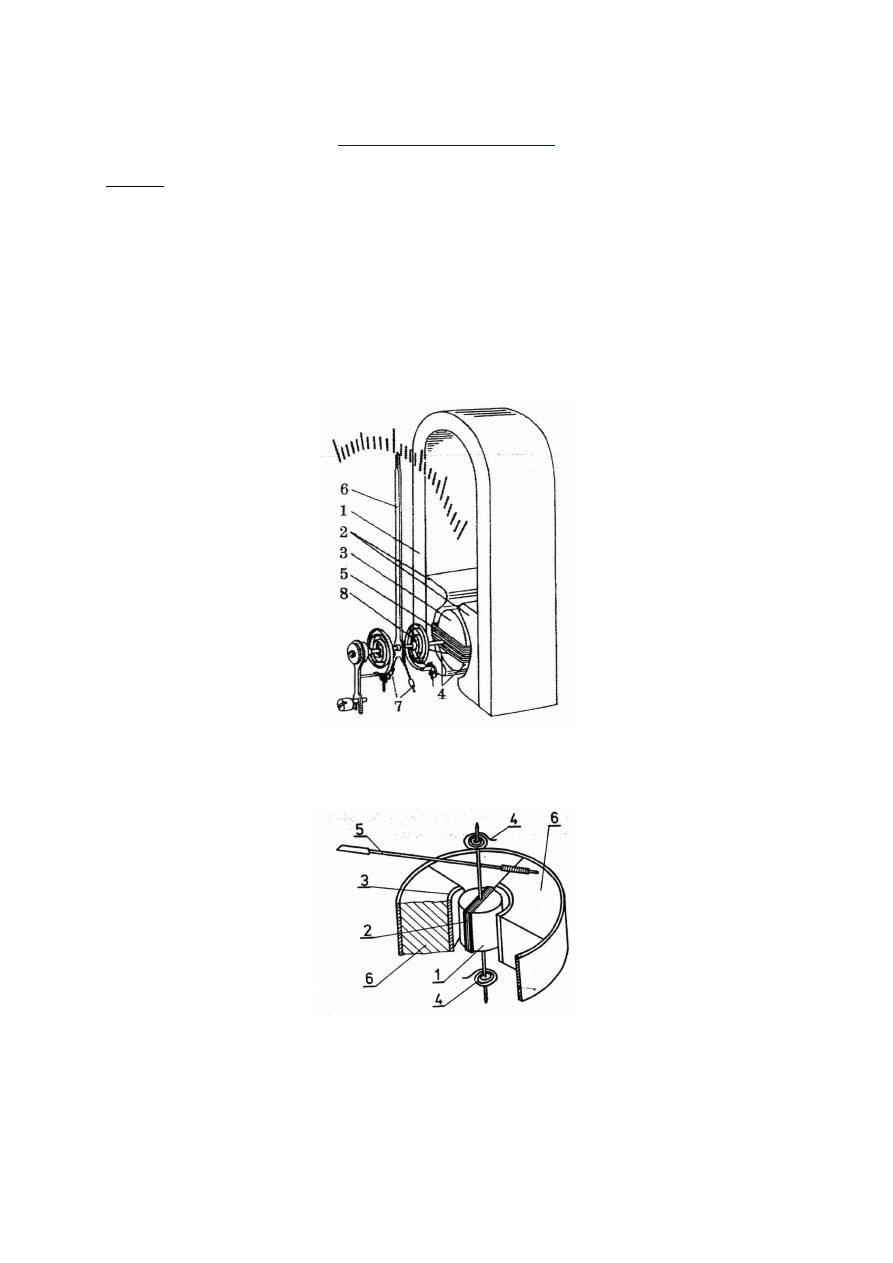
Budowę miernika magnetoelektrycznego z magnesem zewnętrznym pokazano na rys. 4.9, a
na rys. 4.10 przedstawiono budowę przyrządów magnetoelektrycznych, obecnie najczęściej
stosowanych, z magnesem wewnętrznym.
Rys. 4.9. Budowa miernika magnetoelektrycznego z magnesem zewnętrznym: 1 – magnes,
2 – nabiegunnik, 3 – rdzeń, 4 – szczelina powietrzna, 5 – cewka. 6 – wskazówka,
7 – przeciwwagi 8 – sprężynka zwrotna
Rys. 4.10. Budowa miernika magnetoelektrycznego z magnesem wewnętrznym: 1 – rdzeń,
2 – cewka ruchoma, 3 – nabiegunniki, 4 – sprężynka zwrotna, 5 – wskazówka, 6 – magnes
trwały
2
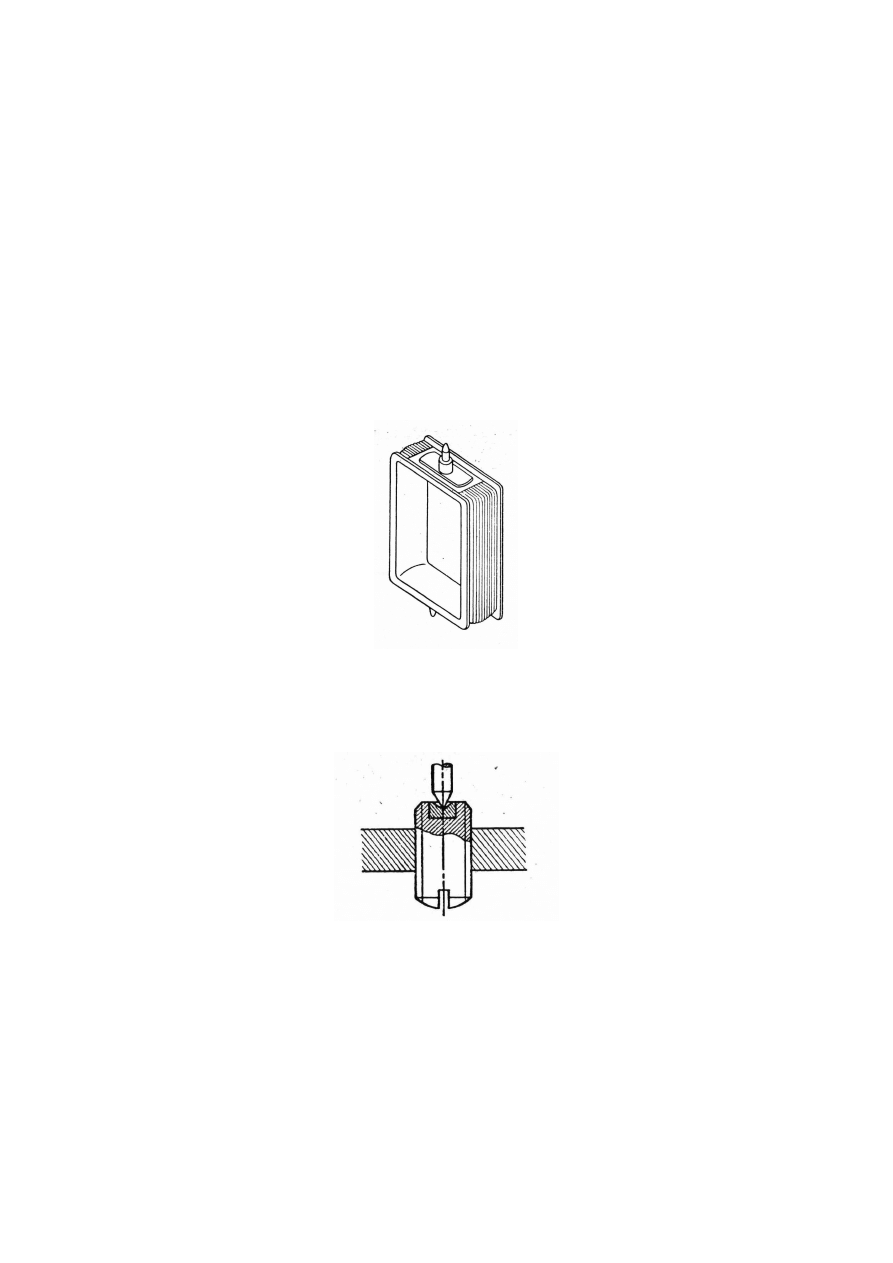
Prąd I przepływający przez cewkę o liczbie zwojów z i szerokości d, nawiniętą na
ruchomej ramce (rys. 4.11) znajdującej się w polu magnetycznym o indukcji B i szerokości
nabiegunnika l wywołuje moment obrotowy
M = IBzdl .
Sprężynka zwrotna, wskutek jej skręcenia, wytwarza moment zwrotny
M
z
= k
α
.
W stanie ustalenia się wskazań
M = M
z
, czyli IBzdl = k
α
.
Stąd
I = c
α
,
gdzie
c = k/(IBzdl).
Rys. 4. 11. Cewka nawinięta na ruchomej ramce
Czopy, z hartowanej stali węglowej, przyklejone do cewki ułożyskowane są łożyskach
z kamieni szlachetnych (syntetyczny szafir lub rubin), podobnie jak czopy w zegarkach
(rys.4.12).
Rys. 4.12. Czop i łożysko
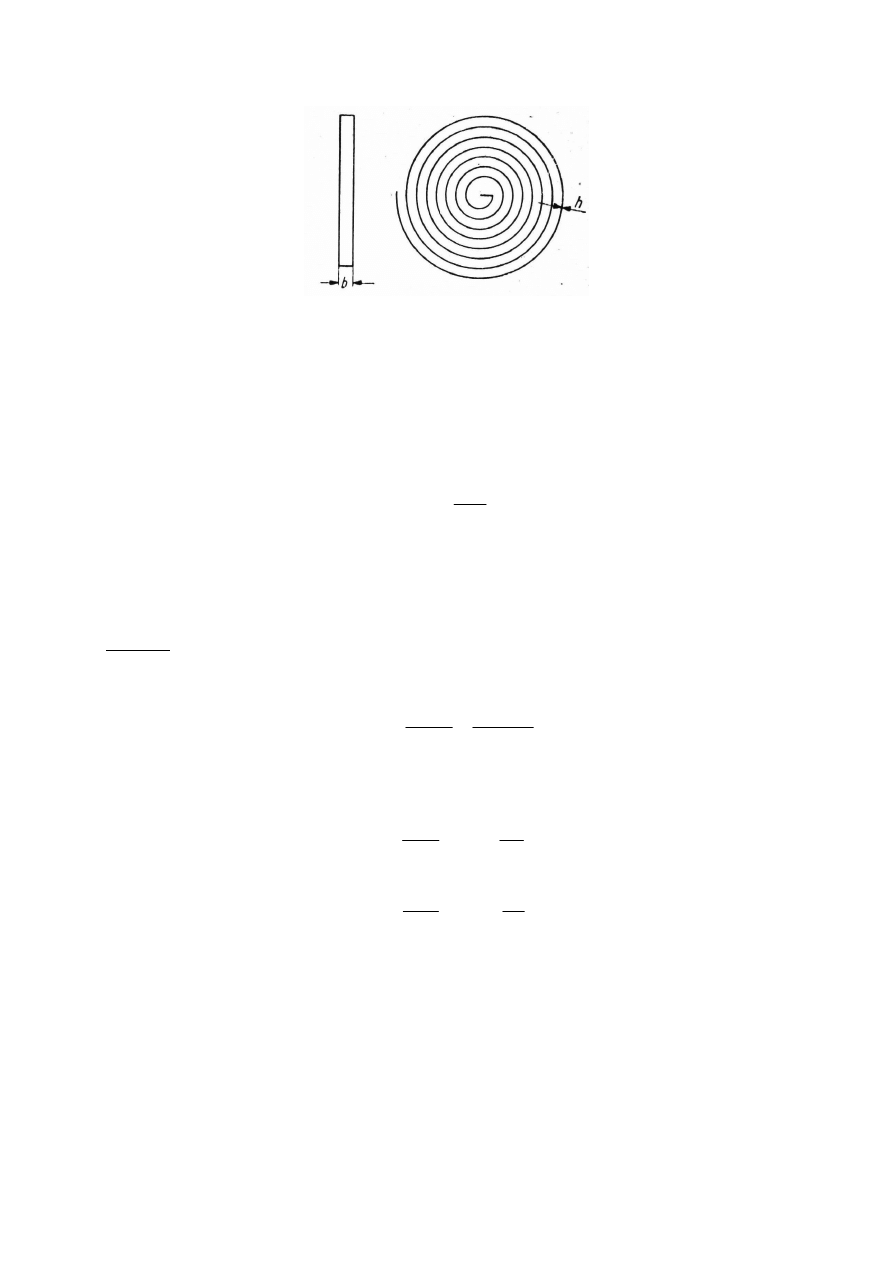
Sprężynki zwrotne (rys. 4.12) równocześnie służą jako doprowadzenia prądu do
uzwojenia cewki
3
Rys. 4.12. Sprężynka zwrotna
NIEDOKŁADNOŚĆ PRZYRZĄDÓW ANALOGOWYCH
Klasa przyrządu
.
X
X
X
kl
n
g
100
∆
δ
ch
=
≥
Klasy są znormalizowane szeregiem: 0,1; 0,2;0,5; 1; 1,5; 2,5
Najczęściej wartością umowna jest zakres pomiarowy.
Przykład
Przyrząd klasy 0,5 o
α
n
=100 dz.
Błąd graniczny wskazań przyrządu
Błąd przy dowolnym wskazaniu X
X
X
kl
X
X
X
n
g
=
∆
=
100
δ
.
lub
α
α
α
α
δα
n
g
kl
=
∆
=
100
.
Np. kl=0,5,
α
n
=150 dz. to dla
α
=10 dz. δ
α
=7,5 %,
α
=50 dz. δ
α
=1,5 %,
α
=100 dz. δ
α
=0,75 %,
α
=150 dz. δ
α
=0,5 %.
Dla wzorów nastawnych klasa odniesiona jest najczęściej do wartości nastawy i jest
wielokrotnością dziesiętną liczb
(1;2;5)10
k
,
gdzie k jest całkowitą liczbą niedodatnią.
.
dz
,
,
kl
n
g
5
0
100
100
5
0
100
±
=
⋅
=
⋅
=
∆
α
α
4
PRZYRZĄDY CYFROWE
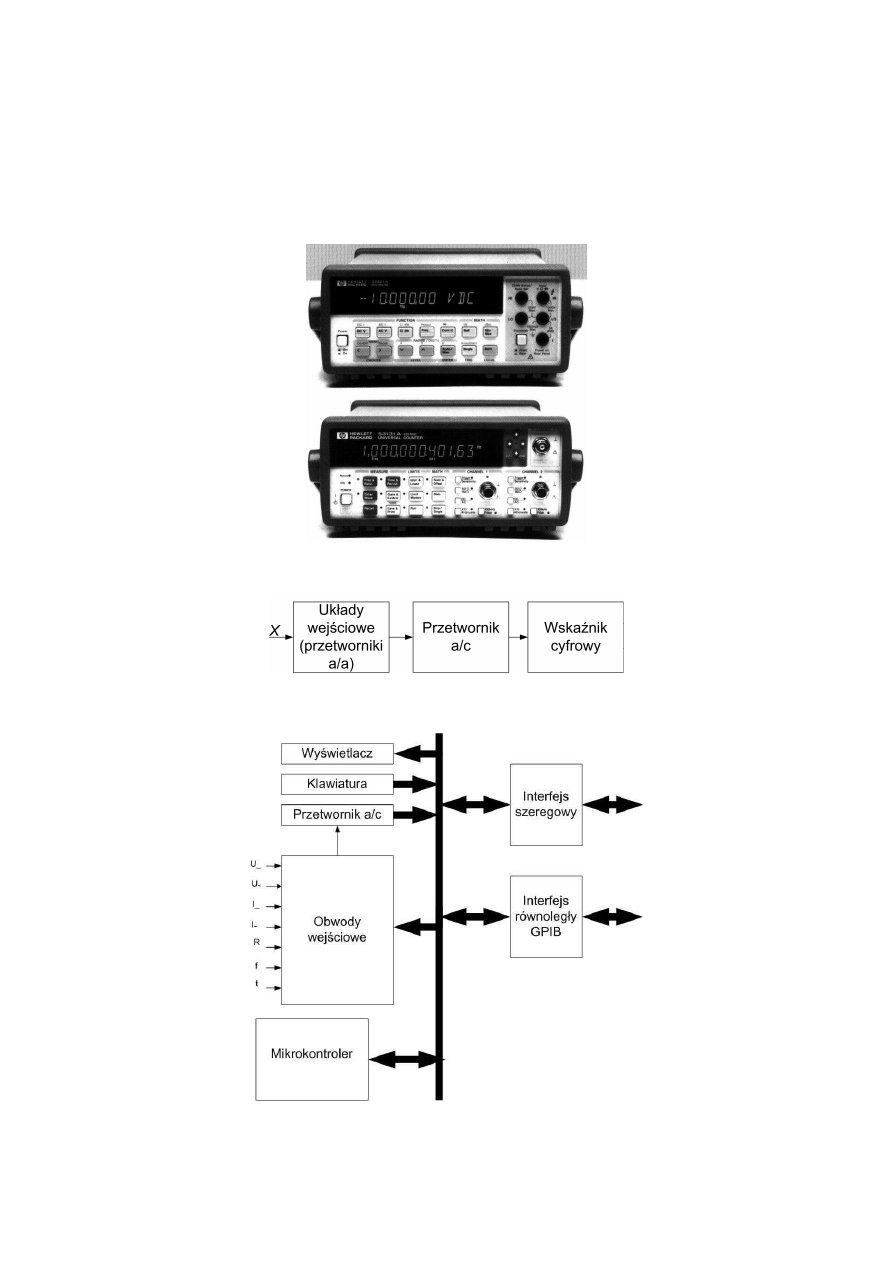
Przyrządy cyfrowe mają cyfrowe pole odczytowe, które dla przyrządów cyfrowych,
umożliwiają odczyt z dużą rozdzielczością (rys. 4.13). Ogólny schemat strukturalny przyrządu
cyfrowego pokazano na rys. 4.14. Przyrządy te obecnie przeważnie w swojej strukturze zawierają
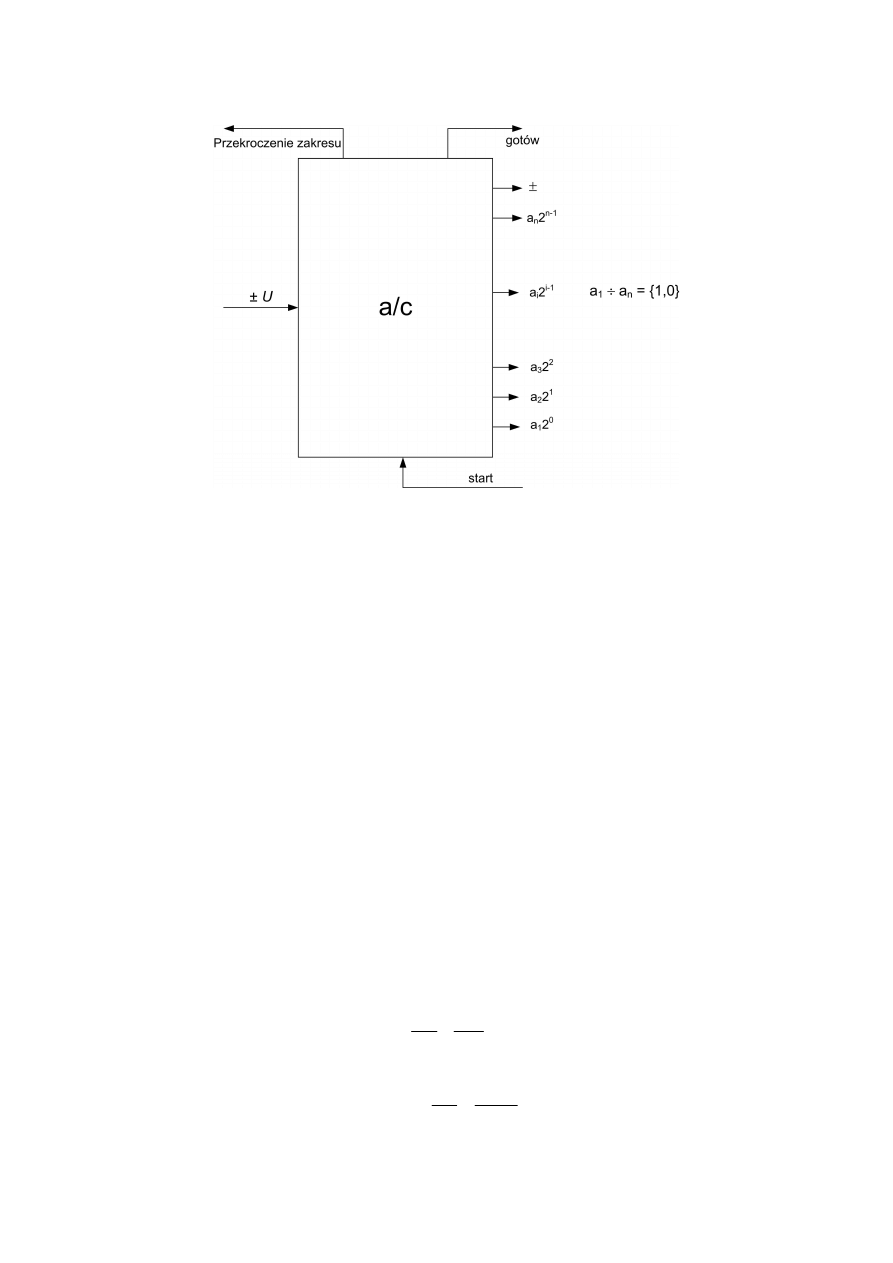
mikroprocesory. Podstawowym elementem przyrządu cyfrowego jest przetwornik analogowo-cyfrowy
(rys. 4.16).
Rys. 4.13. Laboratoryjne multimetry cyfrowe
Rys. 4.14. Schemat strukturalny przyrządu cyfrowego
Rys. 4.15. Schemat strukturalny mikroprocesorowego przyrządu cyfrowego
5
Rys. 4.16. Przetwornik analogowo-cyfrowy
Parametry określające właściwości przetworników a/c:
• zakres napięcia wejściowego,
najczęściej ±5 V lub ± 10 V,
• rezystancja wejściowa,
przeważnie rzędu 10
9
,
• przeciążalność (napięcie wejściowe, które nie powoduje jeszcze uszkodzenia przetwornika),
• niedokładność,
przeważnie ±(0,1 ÷ 0,002) %,
• rozdzielczość (liczba bitów),
4, 8, 16 bitów,
• czas przetwarzania,
od 0,1 s (wolne) do 10 ns (bardzo szybkie),
• rodzaj kodu,
najczęściej binarny,
• obciążalność wyjścia (przeważnie określana jest liczbą bramek, które można przyłączyć do
jednego wyjścia przetwornika),
• warunki użytkowania (zakres temperatury i wilgotności),
• zasada przetwarzania,
• technologia wykonania,
• topografia (rodzaj i rozmieszczenie wyprowadzeń),
• rozmiary,
• masa
NIEDOKŁADNOŚĆ PRZYRZĄDÓW CYFROWYCH
Błąd podstawowy ma dwie składowe: multiplikatywną i addytywną.
Np. dla zakresu 100 mV:
±0,015 % w.m. ±0,002 % w.k.p. ±3µV.
Dla danego wskazania błąd graniczny bezwzględny
∆
+
+
±
=
∆
X
bX
aX
X
of
n
g
100
100
,
a względny błąd graniczny
∆
+
+
±
=
100
X
X
X
X
b
a
X
of
n
δ
.
Może być podany także w postaci
6
±0,01 % w.m. ±1(2) cyfry.
Wówczas
∆
+
±
=
∆
X
n
n
aX
X
g
100
,
∆
+
=
100
n
n
a
X
δ
.
Przykład
V.C. ma niedokładność ±0,1 % ±1 cyfra.
Jeżeli wskazał U=85,1 mV, to
%
,
,
U
22
0
100
851
1
1
0
±
=
+
±
=
δ
,
dla U=2,1 mV
%
,
,
U
9
4
100
21
1
1
0
±
=
+
±
=
δ
.
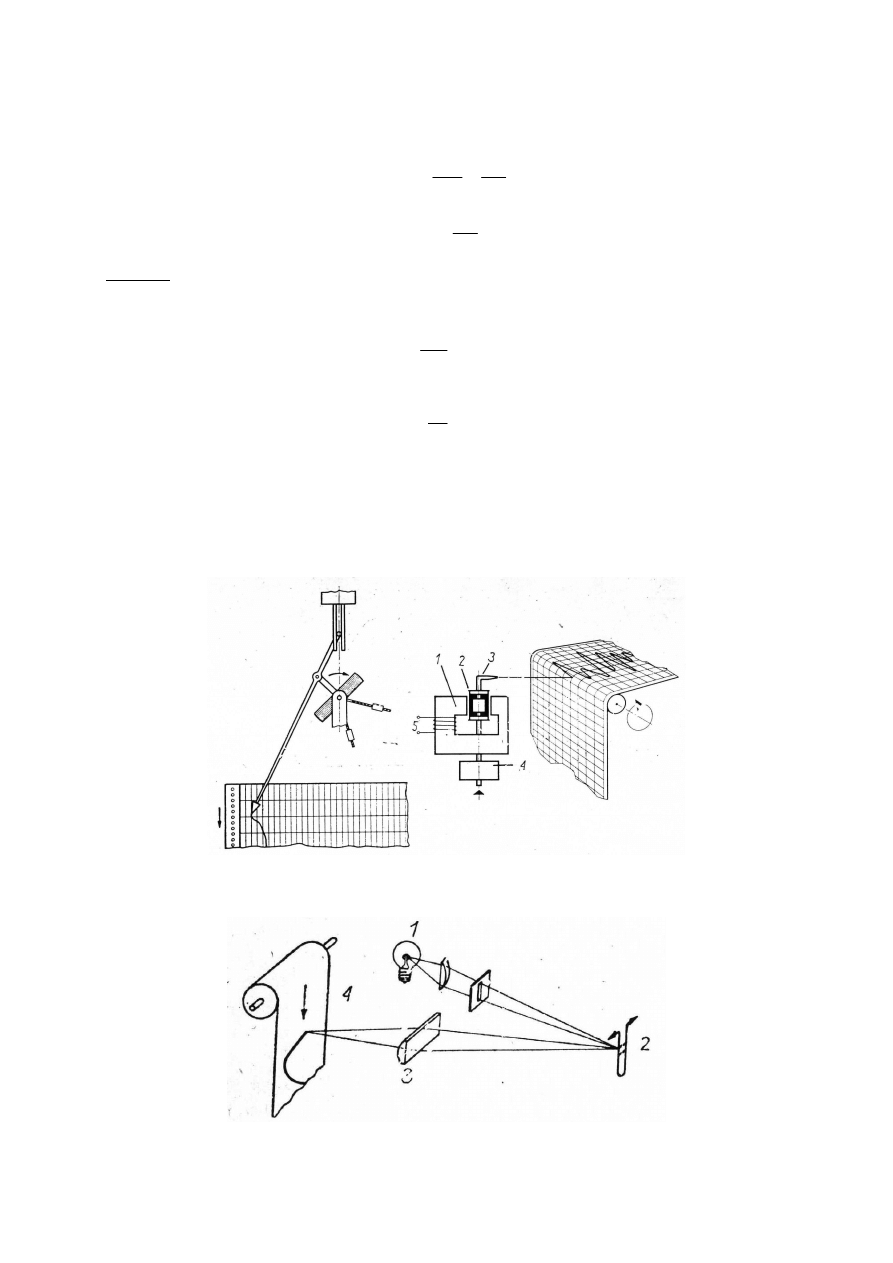
PRZYRZADY REJESTRUJĄCE
REJESTRACJA ANALOGOWA (CIĄGŁA)
Rys. 4.17. Rejestratory atramentowe
Rys. 4.18. Oscylograf pętlicowy
7
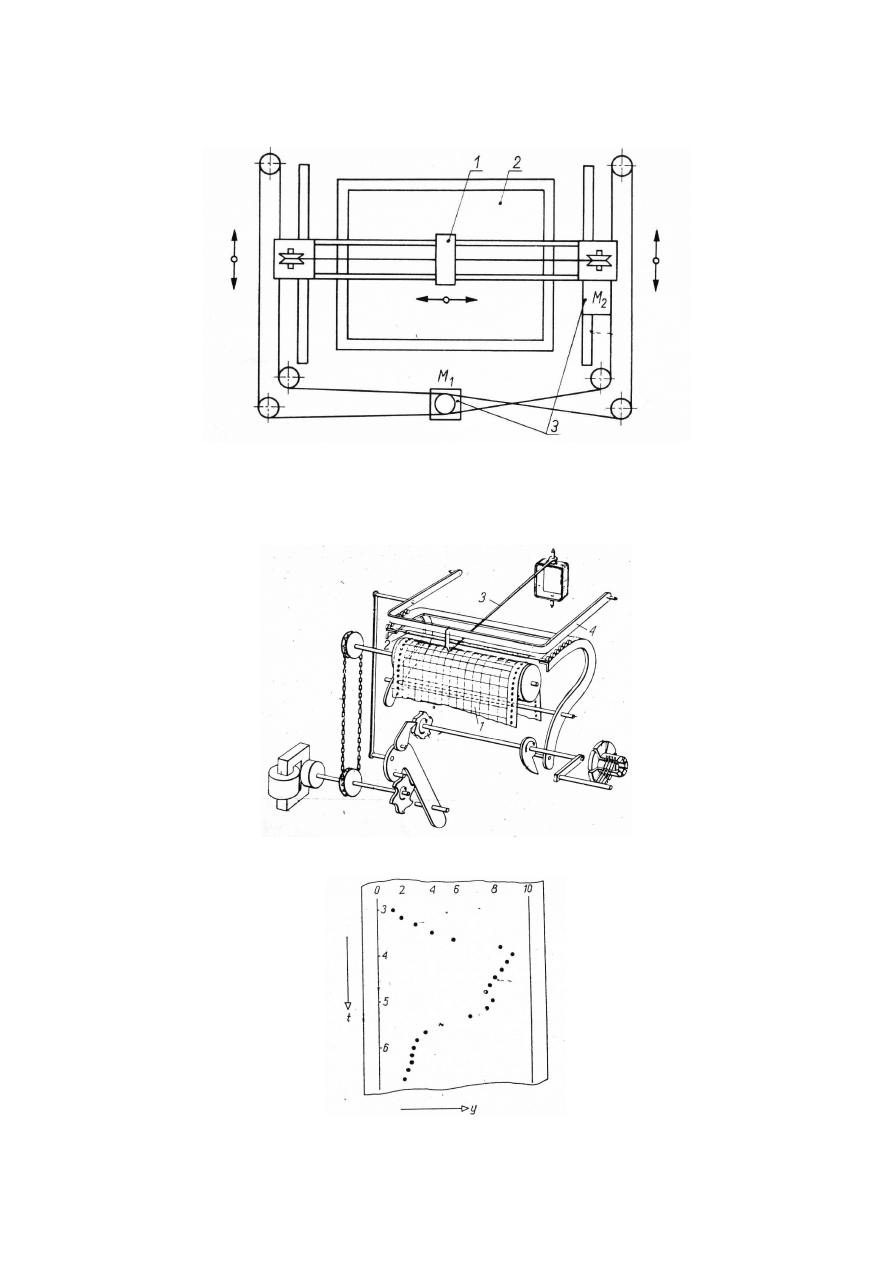
Rys. 4.19. Rejestrator X-Y
REJESTRATRACJA DYSKRETNA
Rys. 4.20. Rejestrator punktowy
Rys. 4.21. Rejestracja punktowa

8
Rys. 4.22. Rejestracja komputerowa
OSCYLOSKOPY
Dostępne są oscyloskopy analogowe i cyfrowe (dyskretne) oraz analogowo-cyfrowe,
tzn. takie które mogą pracować analogowo lub dyskretnie. Czasami mogą zawierać
wewnętrzną drukarkę (rys. 4.23).
Rys. 4.23. Oscyloskop cyfrowy z wewnętrzną drukarką
Wyszukiwarka
Podobne podstrony:
Zadanie z pasowania otwarte, PWR Politechnika Wrocławska, podstawy metrologii, Wykłady 2011
Struktura źródeł błędów w procesie pomiarowym, PWR Politechnika Wrocławska, podstawy metrologii, Wyk
Błędy przypadkowe Metoda pośrednia, PWR Politechnika Wrocławska, podstawy metrologii, Wykłady 2011
Podstawy metrologii Wykład 4a
Przedrostki stosowane do oznaczenia wielokrotności jednostek, PWR Politechnika Wrocławska, podstawy
Podstawy metrologii Wykład 5
Podstawy metrologii Wykład 2
MWG Program wykładu, PWR Politechnika Wrocławska, podstawy metrologii, WYKŁADY
Podstawy metrologii wykład 1
Pracownia Metrologii i Badań Jakości, PWR Politechnika Wrocławska, podstawy metrologii, Wykłady 2011
KLASYFIKACJA BŁĘDÓW a1x, PWR Politechnika Wrocławska, podstawy metrologii, Wykłady 2011
Dyrektywa dot pomiarow, PWR Politechnika Wrocławska, podstawy metrologii, Wykłady 2011
Podstawy metrologii Wykład 1
KLASYFIKACJA PRZYRZADÓW POMIAROWYCH I WZORCÓW MIAR DO POMIARU DŁUGOŚCI, PWR Politechnika Wrocławska,
Podstawy metrologii Wykład 3
więcej podobnych podstron