Mechanika ogólna
Mechanika ogólna
1
1
Wykład
Wykład nr
nr 14
14
Elementy
Elementy kinematyki i dynamiki
kinematyki i dynamiki
Kinematyka
Kinematyka
Dział
Dział mechaniki
mechaniki zajmujący się
zajmujący się
matematycznym opisem układów
matematycznym opisem układów
mechanicznych oraz badaniem
mechanicznych oraz badaniem
geometrycznych właściwości ich ruchu,
geometrycznych właściwości ich ruchu,
geometrycznych właściwości ich ruchu,
geometrycznych właściwości ich ruchu,
bez wnikania w związek między
bez wnikania w związek między
ruchem, a siłami go powodującymi.
ruchem, a siłami go powodującymi.
Ruch
Ruch ciała
ciała –– zmiana położenia w
zmiana położenia w
przestrzeni, względem innego ciała,
przestrzeni, względem innego ciała,
które traktujemy jako nieruchome.
które traktujemy jako nieruchome.
2
2
Podstawowe pojęcia
Podstawowe pojęcia
Przestrzeń i czas;
Przestrzeń i czas;
–– Współrzędne;
Współrzędne;
–– Tor ruchu;
Tor ruchu;
Ruch postępowy:
Ruch postępowy:
Ruch postępowy:
Ruch postępowy:
–– Prędkość;
Prędkość;
–– Przyspieszenie;
Przyspieszenie;
Ruch obrotowy:
Ruch obrotowy:
–– Prędkość kątowa;
Prędkość kątowa;
–– Przyspieszenie kątowe.
Przyspieszenie kątowe.
3
3
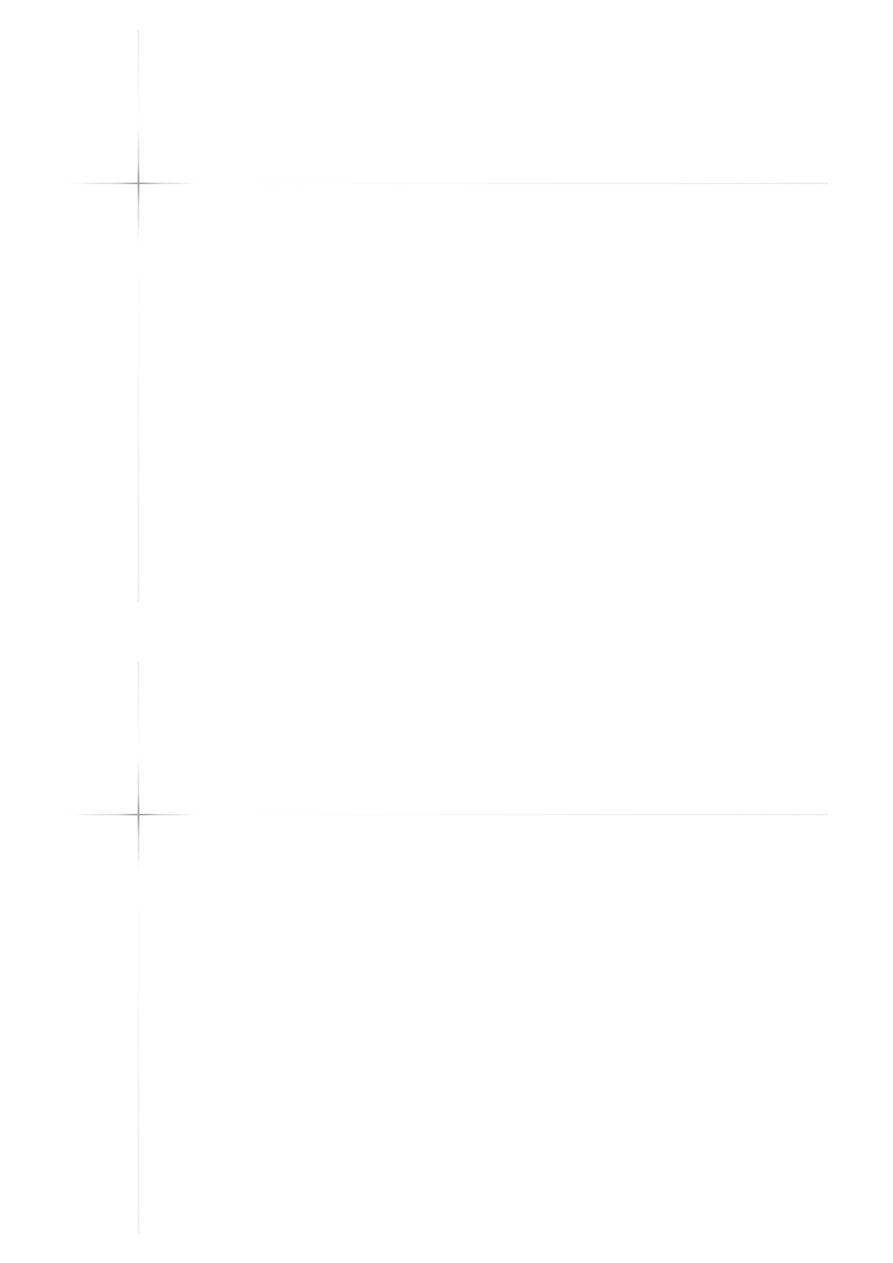
Równania ruchu
Równania ruchu
Wektor wodzący poruszającego się
Wektor wodzący poruszającego się
punktu:
punktu:
Funkcje skalarne opisujące ruch punktu:
Funkcje skalarne opisujące ruch punktu:
t
r
r
Funkcje skalarne opisujące ruch punktu:
Funkcje skalarne opisujące ruch punktu:
4
4
x
x t
y
y t
z
z t
x
y
z
r
i
j
k
x
y
z
x
y
z
i
j
k
t
r
P
Równanie ruchu po torze
Równanie ruchu po torze
(równanie drogi)
(równanie drogi)
Równanie opisujące ruch punktu P,
Równanie opisujące ruch punktu P,
gdy znany jest tor ruchu względem
gdy znany jest tor ruchu względem
nieruchomego położenia
nieruchomego położenia
nieruchomego położenia
nieruchomego położenia
początkowego P
początkowego P
00
::
5
5
x
y
z
P
s
s t
0
P
s t
Prędkość w ruchu
Prędkość w ruchu
prostoliniowym
prostoliniowym
W ruchu jednostajnym:
W ruchu jednostajnym:
W dowolnym ruchu prostoliniowym:
W dowolnym ruchu prostoliniowym:
x
v
t
v
x
–– Prędkość średnia:
Prędkość średnia:
–– Prędkość chwilowa:
Prędkość chwilowa:
6
6
sr
x
v
t
0
lim
t
x
dx
v
t
dt
v
x
x
x
0
P
1
P
2
P
v
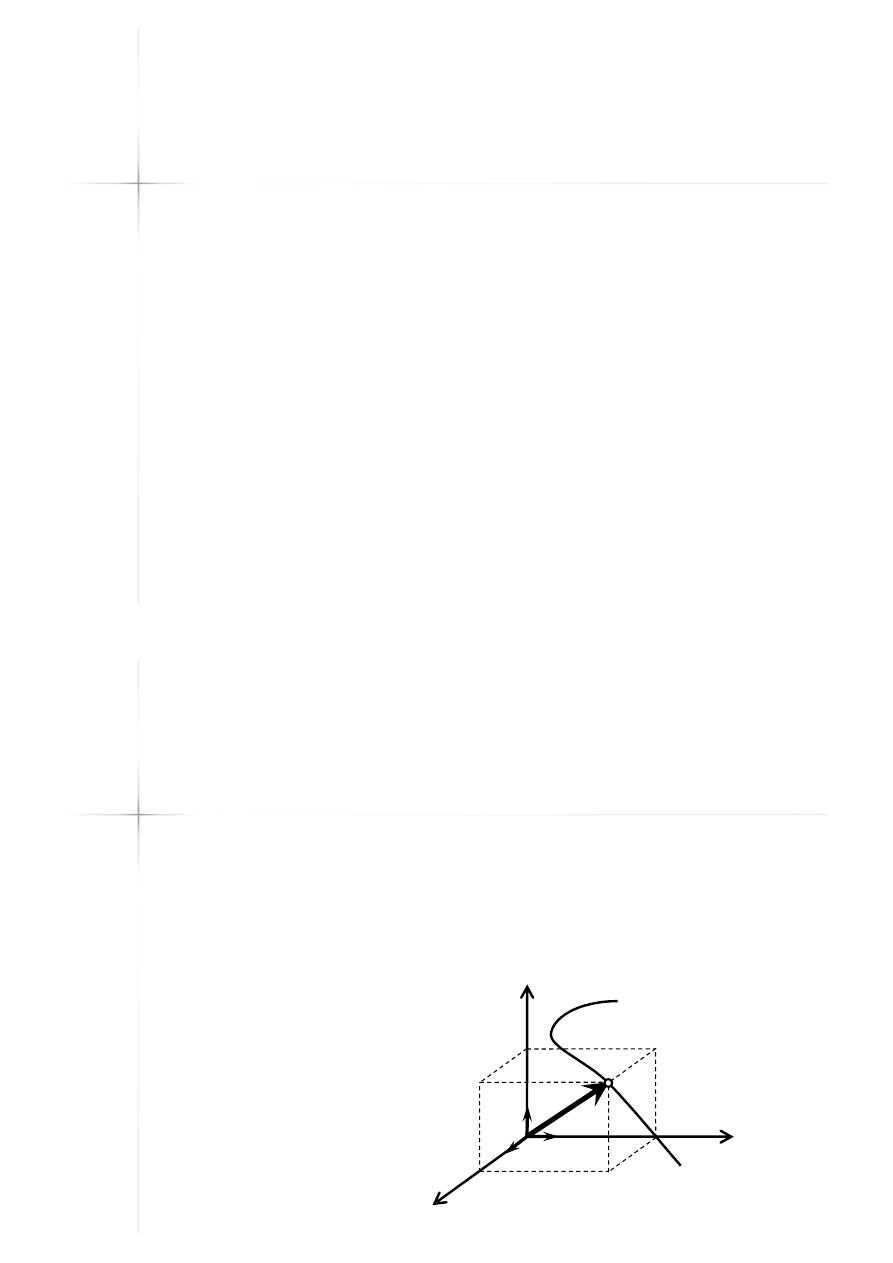
Prędkość w ruchu
Prędkość w ruchu
krzywoliniowym
krzywoliniowym
(1)
(1)
Prędkość punktu:
Prędkość punktu:
–– Wektor o module równym wartości
Wektor o module równym wartości
bezwzględnej pochodnej drogi po czasie,
bezwzględnej pochodnej drogi po czasie,
bezwzględnej pochodnej drogi po czasie,
bezwzględnej pochodnej drogi po czasie,
skierowany wzdłuż stycznej do toru ruchu
skierowany wzdłuż stycznej do toru ruchu
i o zwrocie w kierunku ruchu w danej
i o zwrocie w kierunku ruchu w danej
chwili.
chwili.
7
7
0
lim
t
s
ds
v
t
dt
v
x
y
z
P
0
P
v
Prędkość w ruchu
Prędkość w ruchu
krzywoliniowym
krzywoliniowym
(2)
(2)
Składowe prędkości w układzie
Składowe prędkości w układzie
współrzędnych równe są pochodnym po
współrzędnych równe są pochodnym po
czasie odpowiednich współrzędnych:
czasie odpowiednich współrzędnych:
dx
v
x
dy
v
y
dz
v
z
Moduł prędkości (wartość liczbowa):
Moduł prędkości (wartość liczbowa):
Rzut prędkości punktu na oś układu
Rzut prędkości punktu na oś układu
współrzędnych równy jest prędkości z
współrzędnych równy jest prędkości z
jaką porusza się rzut punktu wzdłuż osi.
jaką porusza się rzut punktu wzdłuż osi.
8
8
x
dx
v
x
dt
y
dy
v
y
dt
z
dz
v
z
dt
2
2
2
2
2
2
x
y
z
ds
v
v
v
v
x
y
z
dt
Prędkość w ruchu
Prędkość w ruchu
krzywoliniowym
krzywoliniowym
(3)
(3)
W układzie współrzędnych
W układzie współrzędnych
prostokątnych rzuty prędkości punktu
prostokątnych rzuty prędkości punktu
są prędkościami rzutów wektora
są prędkościami rzutów wektora
są prędkościami rzutów wektora
są prędkościami rzutów wektora
wodzącego
wodzącego rr..
Prędkość punktu równa jest pochodnej
Prędkość punktu równa jest pochodnej
geometrycznej względem czasu
geometrycznej względem czasu
promienia wodzącego tego punktu:
promienia wodzącego tego punktu:
9
9
d
d ds
ds
t
dt
ds dt
dt
r
r
v
r
t
Przyspieszenie punktu
Przyspieszenie punktu
Pierwsza pochodna prędkości
Pierwsza pochodna prędkości
względem czasu:
względem czasu:
2
2
d
d
dt
dt
v
r
a
v
r
Składowe w układzie kartezjańskim
Składowe w układzie kartezjańskim
można wyrazić jako drugie pochodne
można wyrazić jako drugie pochodne
współrzędnych:
współrzędnych:
10
10
dt
dt
x
a
x
y
a
y
z
a
z
2
2
2
2
2
2
x
y
z
a
a
a
a
x
y
z
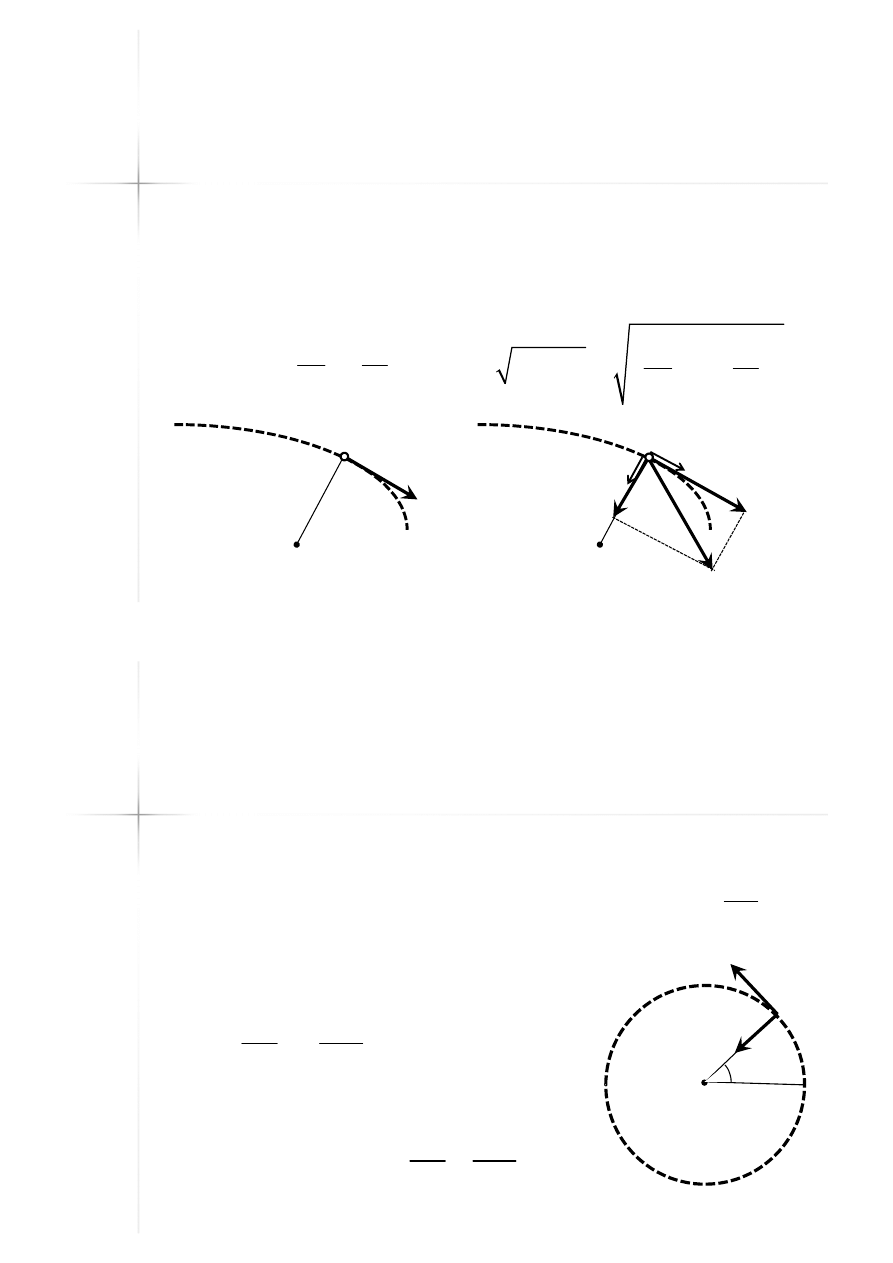
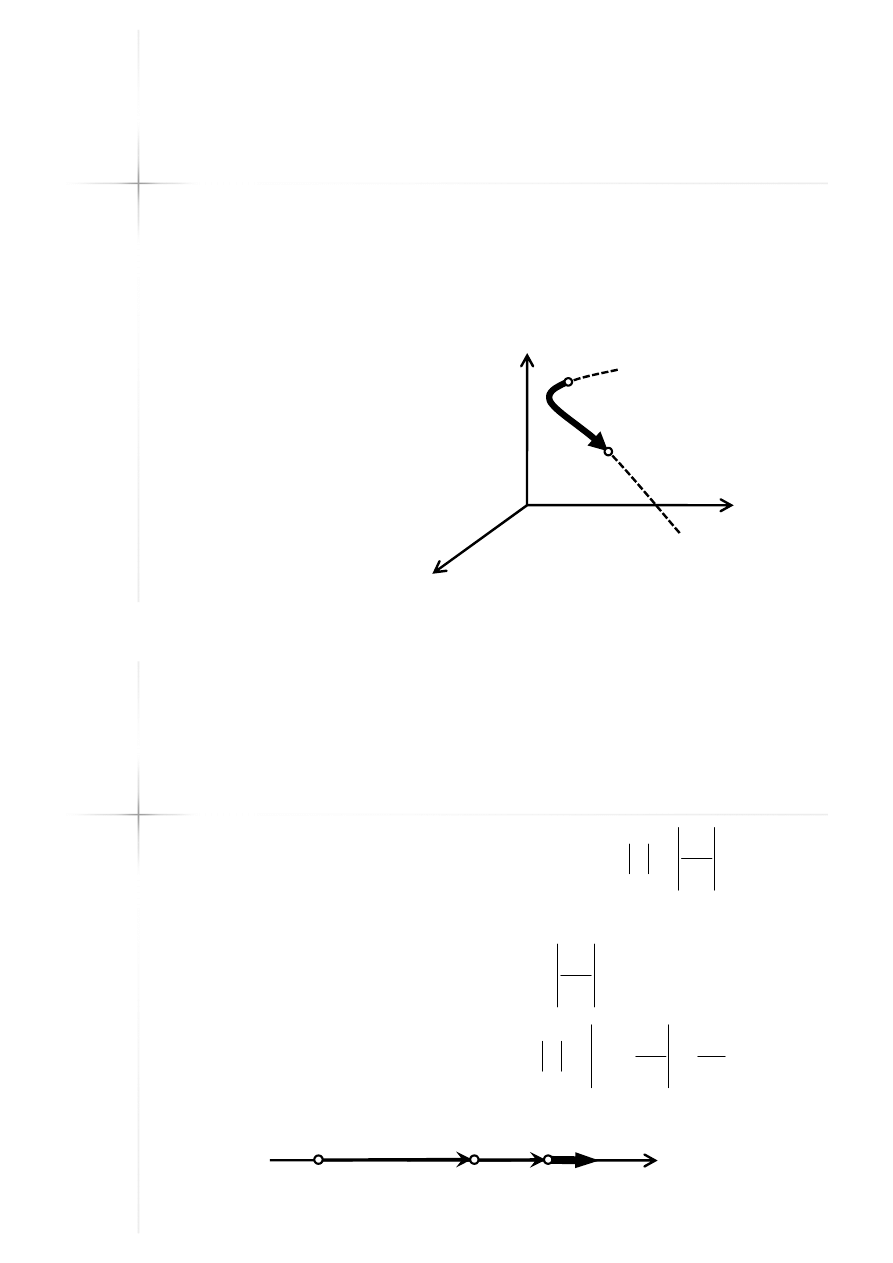
Przyspieszenie styczne i
Przyspieszenie styczne i
normalne do toru ruchu
normalne do toru ruchu
Całkowite przyspieszenie punktu jest
Całkowite przyspieszenie punktu jest
równe sumie składowych
równe sumie składowych –– stycznej i
stycznej i
normalnej do toru ruchu:
normalnej do toru ruchu:
normalnej do toru ruchu:
normalnej do toru ruchu:
11
11
2
t
n
dv
v
dt
a
a
a
t
n
2
2
2
2
2
t
n
dv
v
a
a
a
dt
0
0
v
t
n
t
a
n
a
a
P
P
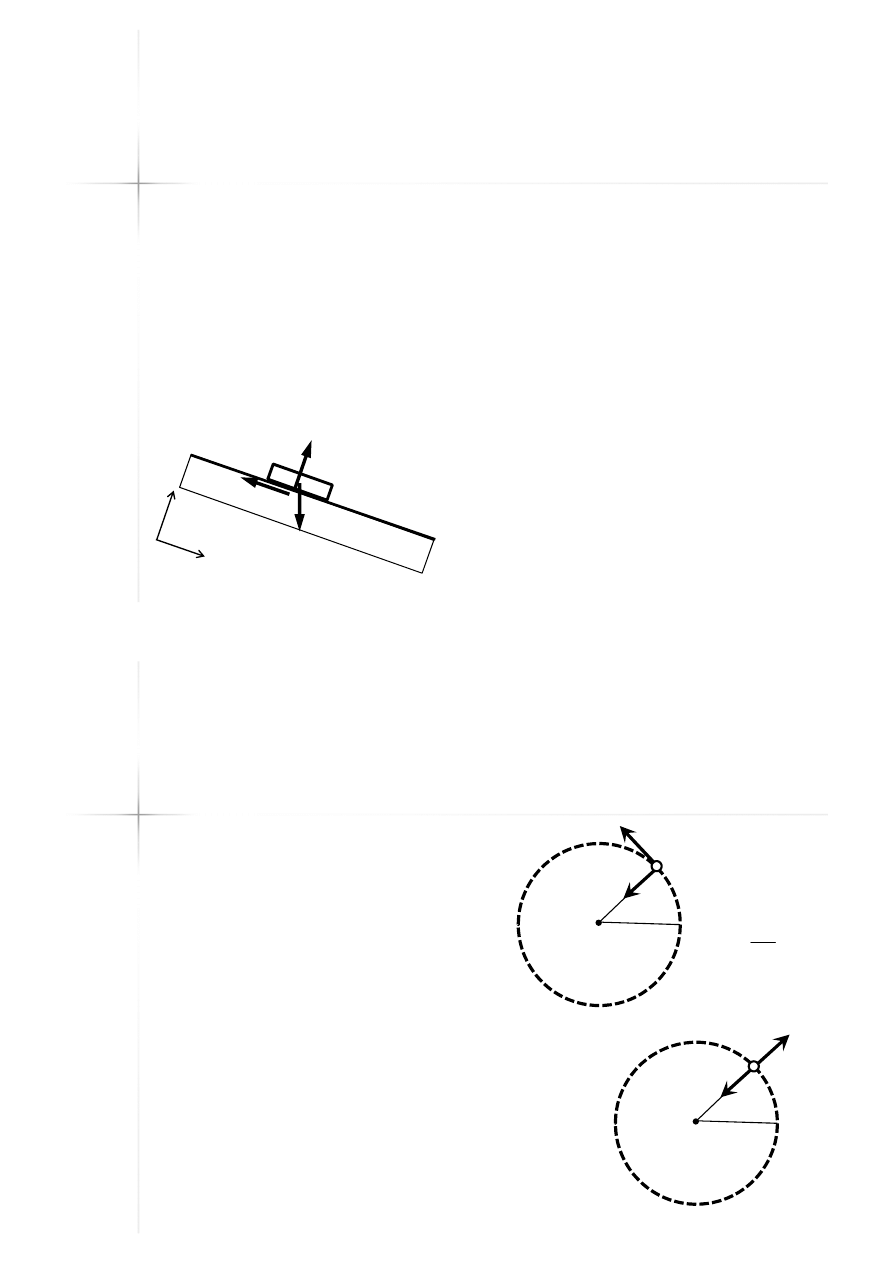
Składowe przyspieszenia
Składowe przyspieszenia
w ruchu po torze kołowym
w ruchu po torze kołowym
Prędkość w zależności od prędkości
Prędkość w zależności od prędkości
kątowej:
kątowej:
Promień krzywizny:
Promień krzywizny:
v
r
d
dt
r
Promień krzywizny:
Promień krzywizny:
Składowe przyspieszenia:
Składowe przyspieszenia:
Przyspieszenie kątowe:
Przyspieszenie kątowe:
12
12
2
2
t
d
d
a
r
r
dt
dt
0
r
t
a
n
a
r
2
n
a
r
t
a
r
2
2
d
d
dt
dt

Szczególne przypadki ruchu
Szczególne przypadki ruchu
Ruch jednostajnie przyspieszony
Ruch jednostajnie przyspieszony
prostoliniowy;
prostoliniowy;
Ruch harmoniczny;
Ruch harmoniczny;
Ruch harmoniczny;
Ruch harmoniczny;
Ruch krzywoliniowy ze stałym
Ruch krzywoliniowy ze stałym
przyspieszeniem.
przyspieszeniem.
13
13
Ruch jednostajnie
Ruch jednostajnie
przyspieszony prostoliniowy
przyspieszony prostoliniowy
Ruch po prostej ze stałym co do wartości
Ruch po prostej ze stałym co do wartości
i kierunku przyspieszeniem:
i kierunku przyspieszeniem:
Prędkość:
Prędkość:
Położenie punktu:
Położenie punktu:
x
a
x
a
const
1
x
v
x
at
C
2
at
x
C t
C
Położenie punktu:
Położenie punktu:
Warunki brzegowe:
Warunki brzegowe:
Stałe całkowania:
Stałe całkowania:
Równanie ruchu:
Równanie ruchu:
Równanie prędkości:
Równanie prędkości:
14
14
1
2
2
at
x
C t
C
0
(
0)
x t
x
0
(
0)
x
x
v t
v
1
0 x
C
v
2
0
C
x
2
0
0
2
x
at
x
v t
x
0 x
v t
at
v
x
0
x
0
P
P
v
0
0
v
x t
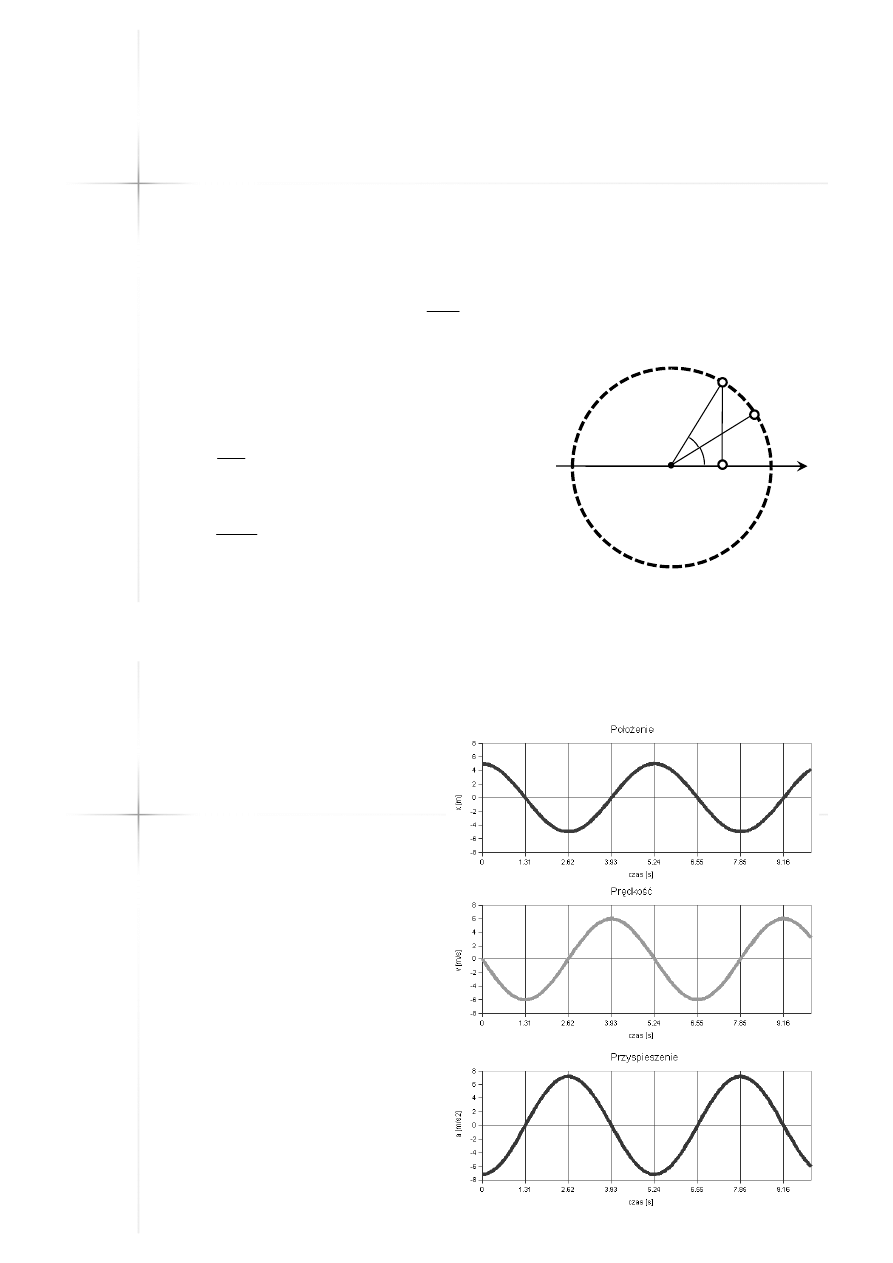
Ruch harmoniczny
Ruch harmoniczny
Punkt
Punkt P
P poruszający się jednostajnie
poruszający się jednostajnie
po okręgu o promieniu
po okręgu o promieniu rr::
2
T
t
Ruch rzutu punktu
Ruch rzutu punktu P
P po osi
po osi xx::
15
15
0
r
0
0
P
P
x
P
0
0
cos
cos
x
r
r
t
T
t
0
sin
dx
v
r
t
dt
2
2
2
0
2
cos
d x
a
r
t
x
dt
Ruch
Ruch
harmoniczny
harmoniczny
Wykresy
Wykresy
położenia,
położenia,
prędkości
prędkości
prędkości
prędkości
i przyspieszenia:
i przyspieszenia:
16
16
Ruch ciała sztywnego
Ruch ciała sztywnego
Ciało sztywne
Ciało sztywne –– układ punktów
układ punktów
materialnych, których wzajemne
materialnych, których wzajemne
odległości pozostają niezmienne.
odległości pozostają niezmienne.
odległości pozostają niezmienne.
odległości pozostają niezmienne.
Ruch postępowy;
Ruch postępowy;
Ruch obrotowy;
Ruch obrotowy;
Złożenie ruchów:
Złożenie ruchów:
–– Ruch płaski;
Ruch płaski;
–– Ruch kulisty.
Ruch kulisty.
17
17
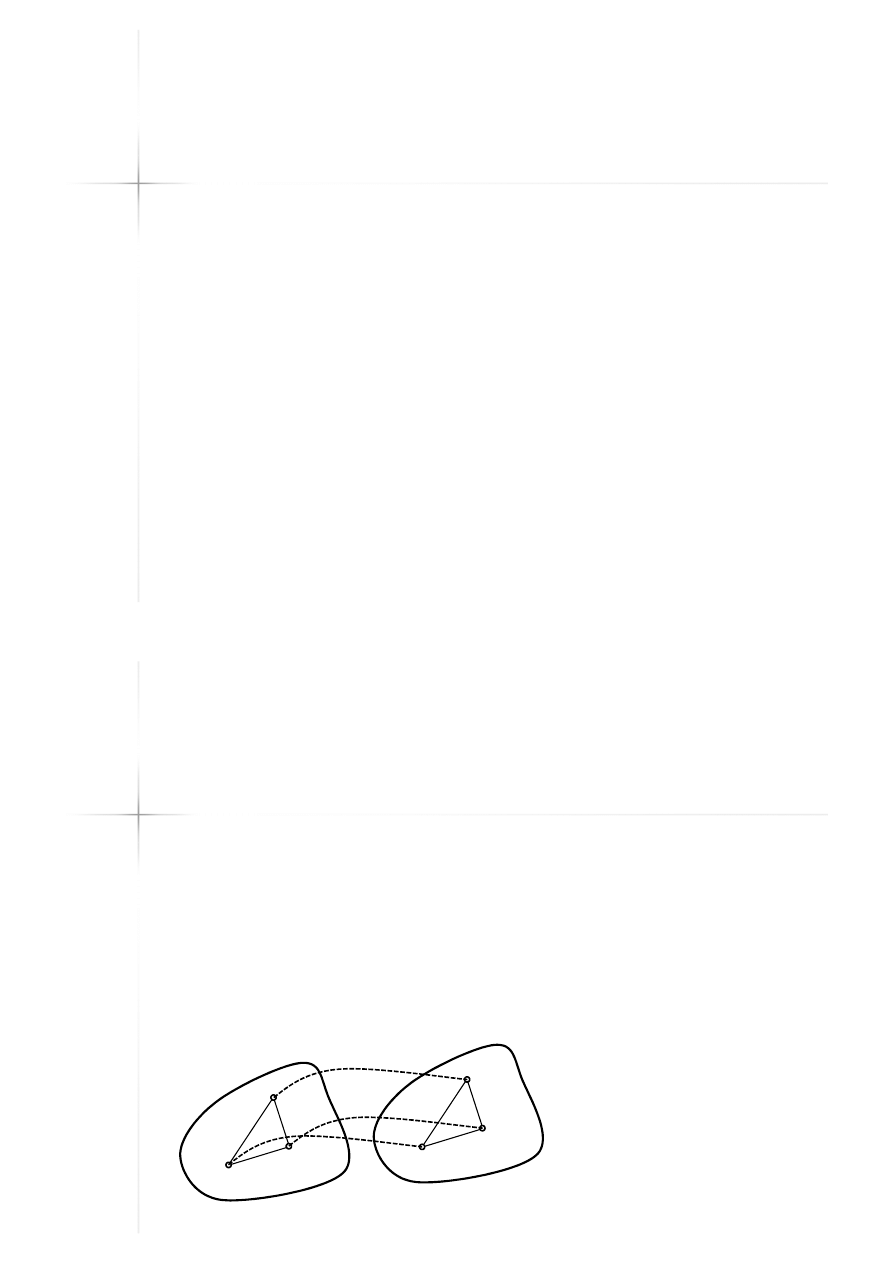
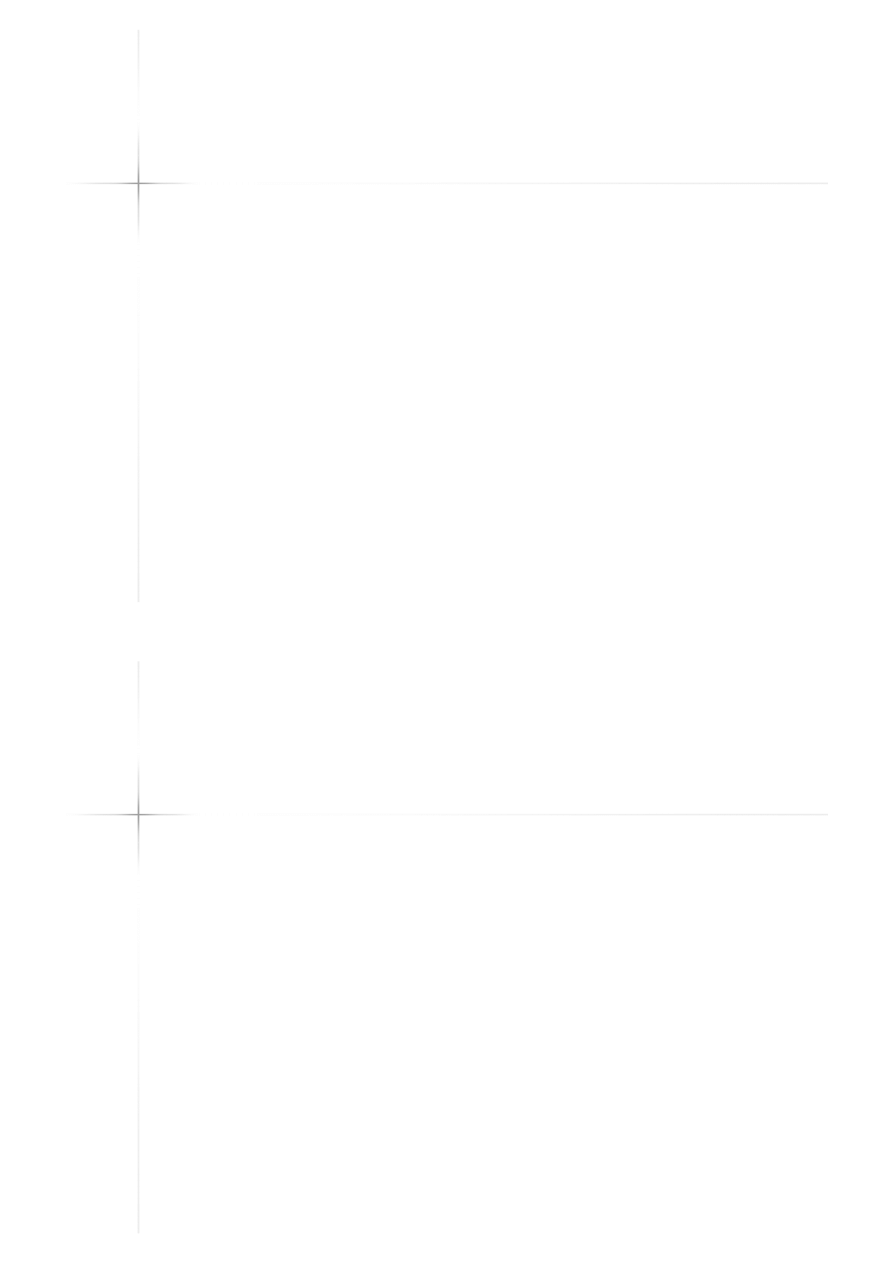
Ruch postępowy ciała
Ruch postępowy ciała
sztywnego
sztywnego
W ruchu
W ruchu postępowym
postępowym prędkości i
prędkości i
przyspieszenia wszystkich punktów
przyspieszenia wszystkich punktów
ciała są jednakowe. Punkty ciała
ciała są jednakowe. Punkty ciała
ciała są jednakowe. Punkty ciała
ciała są jednakowe. Punkty ciała
poruszają się po jednakowych
poruszają się po jednakowych
równolegle przesuniętych torach.
równolegle przesuniętych torach.
18
18
A
B
C
A
B
C
A
B
C
v
v
v
A
B
C
p
p
p
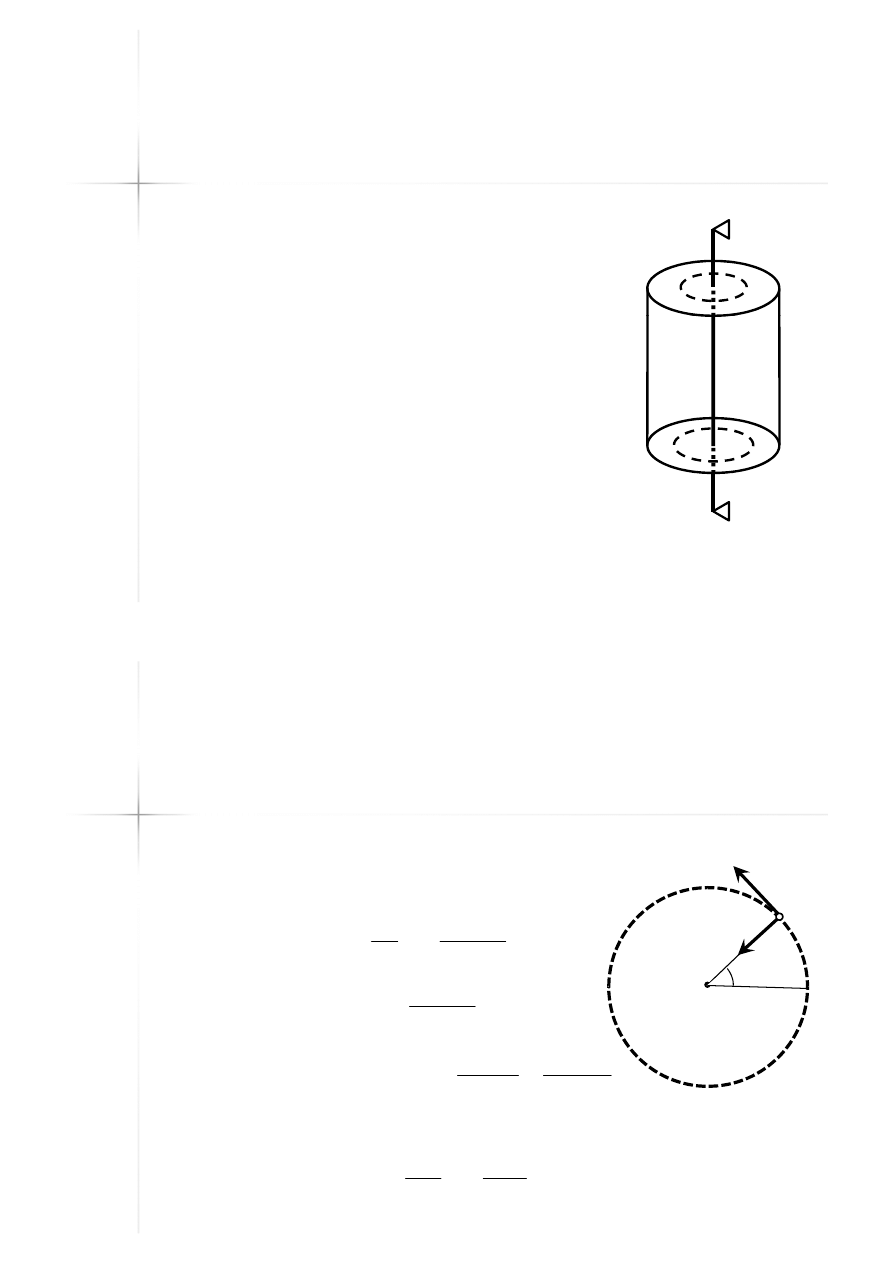
Ruch obrotowy ciała
Ruch obrotowy ciała
sztywnego
sztywnego
Ruch
Ruch obrotowy
obrotowy wokół
wokół
nieruchomej osi obrotu
nieruchomej osi obrotu
(środka obrotu w ruchu
(środka obrotu w ruchu
płaskim).
płaskim).
płaskim).
płaskim).
Torami punktów ciała są
Torami punktów ciała są
okręgi w płaszczyznach
okręgi w płaszczyznach
prostopadłych do osi
prostopadłych do osi
obrotu i środkach leżących
obrotu i środkach leżących
na tej osi.
na tej osi.
19
19
Ruch obrotowy ciała
Ruch obrotowy ciała
sztywnego
sztywnego
Równanie ruchu obrotowego ciała sztywnego:
Równanie ruchu obrotowego ciała sztywnego:
Prędkość
Prędkość
liniowa:
liniowa:
t
a
a
s
r
t
d
t
ds
v
r
r
t
dt
dt
liniowa:
liniowa:
Prędkość
Prędkość
kątowa:
kątowa:
Przyspieszenie
Przyspieszenie
kątowe:
kątowe:
Składowe przyspieszenia
Składowe przyspieszenia
liniowego:
liniowego:
20
20
0
r
n
a
v
r
r
t
dt
dt
d
t
t
dt
2
2
d
t
d
t
t
dt
dt
2
2
t
d
d
a
r
r
r
dt
dt
2
n
a
r
Dynamika
Dynamika
Dział
Dział mechaniki
mechaniki zajmujący się
zajmujący się
badaniem związków między ruchem
badaniem związków między ruchem
punktów materialnych i ciał sztywnych
punktów materialnych i ciał sztywnych
punktów materialnych i ciał sztywnych
punktów materialnych i ciał sztywnych
oraz sił go wywołujących.
oraz sił go wywołujących.
Dynamika bada zależności między
Dynamika bada zależności między
takimi wielkościami jak: siła,
takimi wielkościami jak: siła,
przyspieszenie, prędkość, pęd, kręt,
przyspieszenie, prędkość, pęd, kręt,
praca, energia itd.
praca, energia itd.
21
21
Pierwsza zasada
Pierwsza zasada
dynamiki Newtona
dynamiki Newtona
Prawo bezwładności
Prawo bezwładności::
–– Z punktu widzenia dynamiki jest wszystko
Z punktu widzenia dynamiki jest wszystko
jedno, czy ciało się porusza ruchem
jedno, czy ciało się porusza ruchem
jedno, czy ciało się porusza ruchem
jedno, czy ciało się porusza ruchem
jednostajnym prostoliniowym, czy jest w
jednostajnym prostoliniowym, czy jest w
spoczynku.
spoczynku.
–– W obu przypadkach siły działające na
W obu przypadkach siły działające na
ciało są w równowadze.
ciało są w równowadze.
–– Można zawsze założyć istnienie
Można zawsze założyć istnienie
nieruchomego układu odniesienia.
nieruchomego układu odniesienia.
22
22
Druga zasada dynamiki
Druga zasada dynamiki
Newtona
Newtona
Pod działaniem stałej siły punkt materialny
Pod działaniem stałej siły punkt materialny
porusza się ruchem jednostajnie
porusza się ruchem jednostajnie
przyspieszonym po linii prostej.
przyspieszonym po linii prostej.
Przyspieszenie z jakim porusza się punkt
Przyspieszenie z jakim porusza się punkt
Przyspieszenie z jakim porusza się punkt
Przyspieszenie z jakim porusza się punkt
jest wprost proporcjonalne do działającej
jest wprost proporcjonalne do działającej
siły (wypadkowej układu sił), a odwrotnie
siły (wypadkowej układu sił), a odwrotnie
proporcjonalne do masy ciała.
proporcjonalne do masy ciała.
23
23
m
P
a
P
a
m
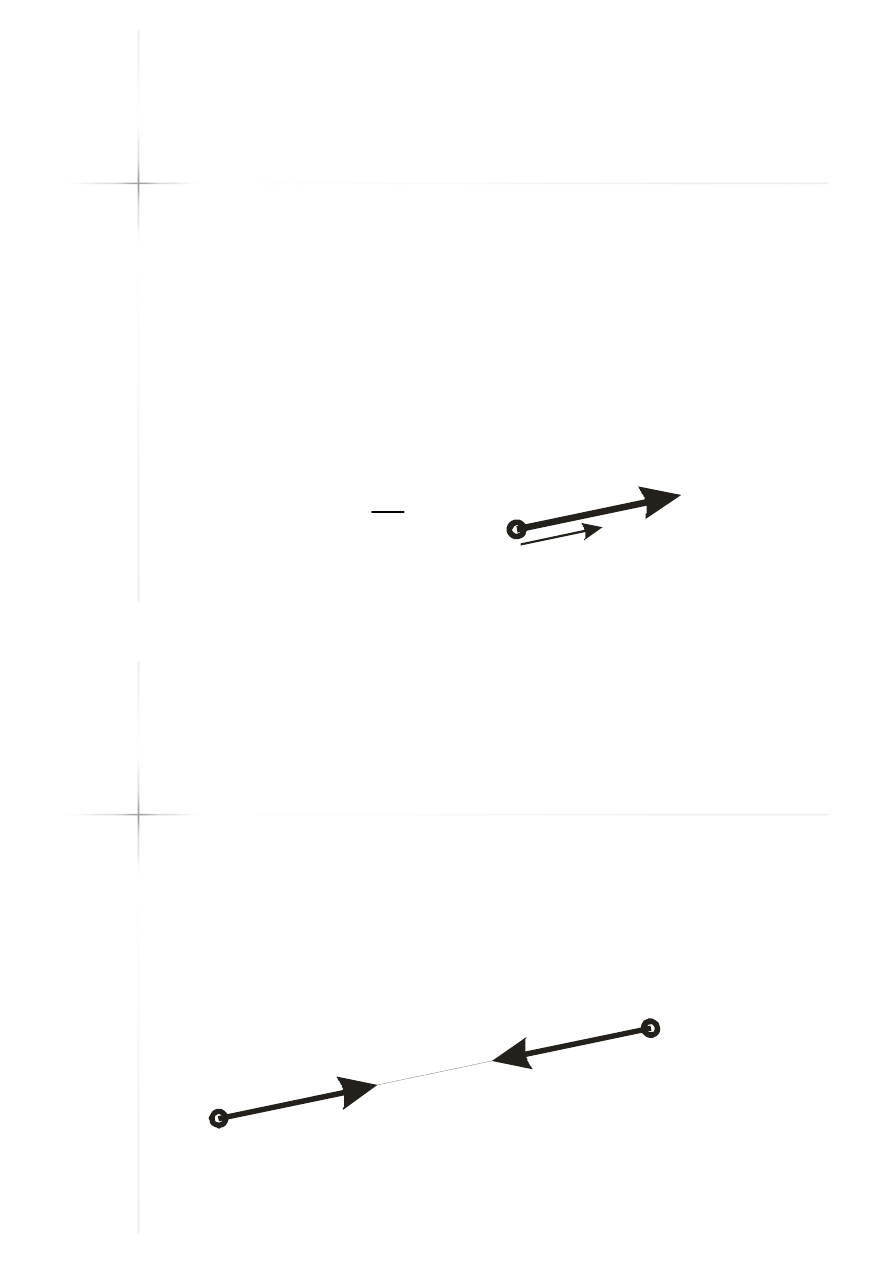
Trzecia zasada dynamiki
Trzecia zasada dynamiki
Newtona
Newtona
Siły wzajemnego oddziaływania dwóch
Siły wzajemnego oddziaływania dwóch
punktów materialnych równoważą się,
punktów materialnych równoważą się,
tj. mają jednakowe moduły i kierunki,
tj. mają jednakowe moduły i kierunki,
tj. mają jednakowe moduły i kierunki,
tj. mają jednakowe moduły i kierunki,
zaś zwroty przeciwne.
zaś zwroty przeciwne.
24
24
P
1
P
2
2
1
P
P
2
1
P
P
Zasada superpozycji
Zasada superpozycji
Efekt działania kilku wpływów na ciało
Efekt działania kilku wpływów na ciało
można wyrazić jako sumę efektów ich
można wyrazić jako sumę efektów ich
działania.
działania.
Przyspieszenie z jakim porusza się ciało
Przyspieszenie z jakim porusza się ciało
Przyspieszenie z jakim porusza się ciało
Przyspieszenie z jakim porusza się ciało
pod wpływem układu sił (siły
pod wpływem układu sił (siły
wypadkowej) może zostać obliczone
wypadkowej) może zostać obliczone
jako suma przyspieszeń powodowanych
jako suma przyspieszeń powodowanych
przez każdą z sił składowych.
przez każdą z sił składowych.
25
25
1
2
...
...
n
n
m
m
m
m
1
2
a
a
a
a
P
P
P
P
Prawo grawitacji
Prawo grawitacji
Dwa ciała działają na siebie wzajemnie
Dwa ciała działają na siebie wzajemnie
jednakowymi co do wartości i
jednakowymi co do wartości i
przeciwnie zwróconymi siłami o wartości
przeciwnie zwróconymi siłami o wartości
przeciwnie zwróconymi siłami o wartości
przeciwnie zwróconymi siłami o wartości
odwrotnie proporcjonalnej do kwadratu
odwrotnie proporcjonalnej do kwadratu
odległości między ich środkami i wprost
odległości między ich środkami i wprost
proporcjonalnej do iloczynu mas tych
proporcjonalnej do iloczynu mas tych
ciał.
ciał.
26
26
1
2
2
m m
r
P
G
Równania ruchu punktu
Równania ruchu punktu
materialnego
materialnego
Dynamiczne równanie różniczkowe ruchu
Dynamiczne równanie różniczkowe ruchu
punktu materialnego:
punktu materialnego:
d
d
m
m
m
r
r
a
P
Dynamiczne różniczkowe równania ruchu
Dynamiczne różniczkowe równania ruchu
we współrzędnych prostokątnych:
we współrzędnych prostokątnych:
27
27
m
m
m
dt
dt
r
a
P
x
ix
i
m x
m a
P
z
iz
i
m z
m a
P
y
iy
i
m y
m a
P
Skalarne równania ruchu
Skalarne równania ruchu
Rzutowanie przyspieszenia na osie
Rzutowanie przyspieszenia na osie
normalną, styczną i binormalną:
normalną, styczną i binormalną:
2
v
m a
m
P
dv
m a
m
P
Wektor przyspieszenia całkowitego leży
Wektor przyspieszenia całkowitego leży
na płaszczyźnie ściśle stycznej do toru.
na płaszczyźnie ściśle stycznej do toru.
28
28
n
in
i
v
m a
m
P
t
it
i
dv
m a
m
P
dt
b
ib
i
m a
P
0
b
a
Pierwsze i drugie zadanie
Pierwsze i drugie zadanie
dynamiki
dynamiki
Pierwsze zadanie dynamiki:
Pierwsze zadanie dynamiki:
–– Dana jest masa i równania ruchu punktu
Dana jest masa i równania ruchu punktu
materialnego, należy wyznaczyć siły
materialnego, należy wyznaczyć siły
materialnego, należy wyznaczyć siły
materialnego, należy wyznaczyć siły
działające na ten punkt;
działające na ten punkt;
Drugie zadanie dynamiki:
Drugie zadanie dynamiki:
–– Dana jest masa i siły działające na punkt
Dana jest masa i siły działające na punkt
materialny, należy wyznaczyć równania
materialny, należy wyznaczyć równania
ruchu tego punktu.
ruchu tego punktu.
29
29
Pierwsze zadanie
Pierwsze zadanie
dynamiki
dynamiki
Równanie ruchu:
Równanie ruchu:
Składowe wypadkowej we współrzędnych
Składowe wypadkowej we współrzędnych
prostokątnych:
prostokątnych:
m
m
a
r
P
Składowe wypadkowej we współrzędnych
Składowe wypadkowej we współrzędnych
prostokątnych:
prostokątnych:
Wartość i kierunek wypadkowej:
Wartość i kierunek wypadkowej:
30
30
x
P
mx
y
P
my
x
P
mz
2
2
2
x
y
z
P
P
P
P
cos
,
x
P
P
P i
cos
,
y
P
P
P j
cos
,
z
P
P
P k
Drugie zadanie dynamiki
Drugie zadanie dynamiki
Ruch punktu pod działaniem siły:
Ruch punktu pod działaniem siły:
–– Stałej co do wartości i kierunku;
Stałej co do wartości i kierunku;
const
P
–– Zależnej od czasu;
Zależnej od czasu;
–– Zależnej od prędkości;
Zależnej od prędkości;
–– Zależnej od położenia.
Zależnej od położenia.
31
31
t
P
P
v
P
P
x
P
P
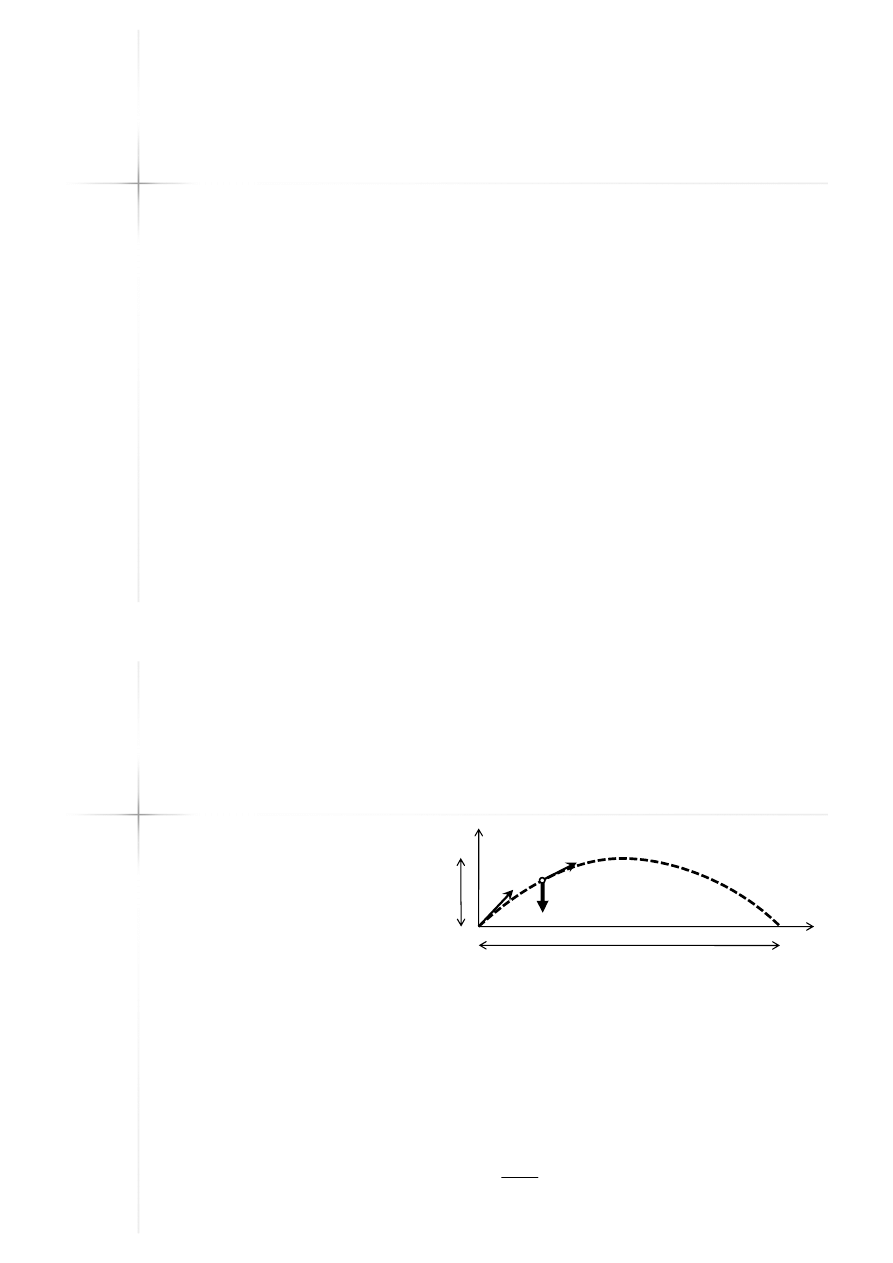
Ruch pod działaniem
Ruch pod działaniem
stałej siły
stałej siły
(1)
(1)
Rzut ukośny:
Rzut ukośny:
Równania ruchu:
Równania ruchu:
0
v
0
mx
my
mg
mg
v
max
x
max
y
Składowe przyspieszeń:
Składowe przyspieszeń:
Składowe prędkości:
Składowe prędkości:
Równania ruchu:
Równania ruchu:
32
32
2
y
v
t
gt
C
1
3
x t
C t
C
0
mx
my
mg
0
x
a
y
a
g
1
x
v
C
2
2
4
2
gt
y t
C t
C
Ruch pod działaniem
Ruch pod działaniem
stałej siły
stałej siły
(2)
(2)
Warunki brzegowe:
Warunki brzegowe:
0
0
(
0)
cos
x
x
v t
v
v
0
0
(
0)
sin
y
y
v t
v
v
(
0)
0
x t
(
0)
0
y t
0
v
mg
v
max
y
max
x
Stałe całkowania:
Stałe całkowania:
Równania prędkości:
Równania prędkości:
Równania ruchu
Równania ruchu
33
33
1
0
cos
C
v
0
sin
v t
gt
v
(
0)
0
x t
(
0)
0
y t
2
0
sin
C
v
3
0
C
4
0
C
0
cos
x
v
v
0
cos
x t
v t
2
0
sin
2
gt
y t
v t
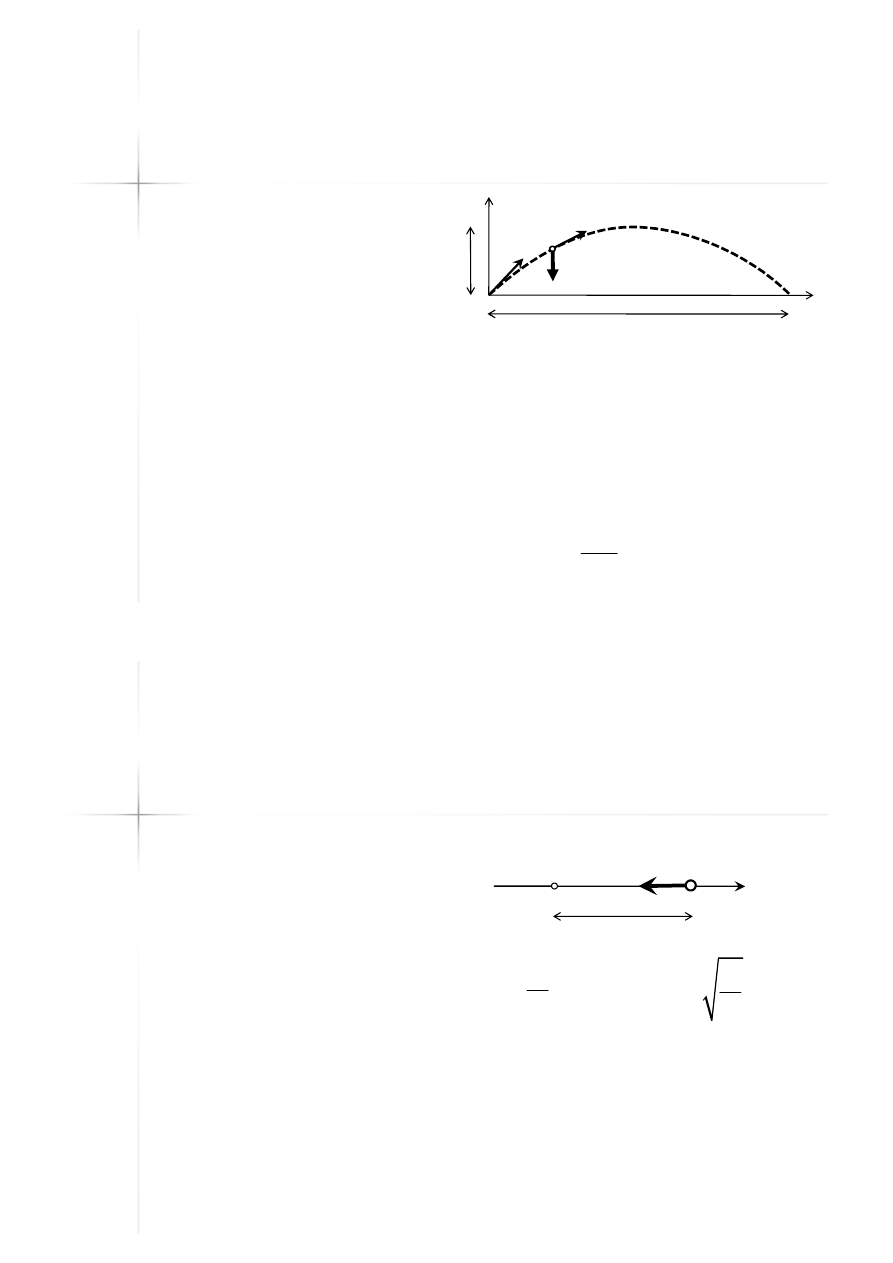
Ruch pod działaniem siły
Ruch pod działaniem siły
zależnej od położenia
zależnej od położenia
Drgania liniowe:
Drgania liniowe:
Różniczkowe
Różniczkowe
równanie ruchu:
równanie ruchu:
0
x
P
m
x
równanie ruchu:
równanie ruchu:
Rozwiązanie ogólne:
Rozwiązanie ogólne:
(Równanie ruchu harmonicznego prostego)
(Równanie ruchu harmonicznego prostego)
34
34
x
x
P
ma
mx
kx
0
k
x
x
m
k
m
1
2
sin
cos
x
C
t
C
t
0
sin
x
a
t
1
0
cos
C
a
2
0
sin
C
a
Ruch nieswobodnego
Ruch nieswobodnego
punktu materialnego
punktu materialnego
W przypadku, gdy warunki zewnętrzne
W przypadku, gdy warunki zewnętrzne
ograniczają swobodę ruchu, w
ograniczają swobodę ruchu, w
równaniu ruchu należy uwzględnić
równaniu ruchu należy uwzględnić
równaniu ruchu należy uwzględnić
równaniu ruchu należy uwzględnić
także siły bierne (reakcje więzów):
także siły bierne (reakcje więzów):
35
35
m
m
a
r
P
R
X
Y
N
m
G
g
T
N
x
x
m
a
P
0
y
y
m
a
P
Siła bezwładności
Siła bezwładności
Równanie ruchu:
Równanie ruchu:
Siła bezwładności
Siła bezwładności
((d’Alemberta
d’Alemberta):
):
m
P
a
0
m
P
a
0
r
v
n
a
0
t
a
const
v
2
n
v
a
r
m
((d’Alemberta
d’Alemberta):
):
Zasada
Zasada d’Alemberta
d’Alemberta::
–– Siły rzeczywiste działające na
Siły rzeczywiste działające na
punkt materialny równoważą
punkt materialny równoważą
się z siłą bezwładności tego
się z siłą bezwładności tego
punktu.
punktu.
36
36
m
B
a
0
P
B
0
r
P
n
a
r
m
B
Wyszukiwarka
Podobne podstrony:
Elementy systemów dynamicznych Simulink
14 elementy topograficzne czaszki, Wykłady anatomia
14 elementy i uklady elektronic Nieznany
14 Elementy morfotyczne krwi c d
Elementy statyki i dynamiki płynów
1Fizyka zadania odpowiedzi kinemat dynamika
1 Kinematyka i dynamika robotów i manipulatorów literatur
3 Elementy kinematyki płynów
Kinematyka i Dynamika Układów Mechatronicznych
Mechanika Ogólna Kinematyka Dynamika
3 Elementy kinematyki płynów 3
3 Elementy kinematyki plynow
WZORY, kinematyka, dynamika, grawitacja
Mechanika Ogólna, Kinematyka Dynamika
14 Elementy grafiki
Fizyka kinematyka i dynamika
więcej podobnych podstron