Maszyna Turinga
Alan Mathison Turing (ur. 23 czerwca 1912 w Londynie –
zm. 7 czerwca 1954 w Wilmslow) –
angielski matematyk, twórca maszyny Turinga
i jeden z twórców informatyki.
Budowa maszyny Turinga
Alan Turing pod koniec lat trzydziestych
ubiegłego wieku na potrzeby swoich bada
ń
nad
problemami
obliczalno
ś
ci
opracował
model maszyny, który mo
ż
na zrealizowa
ć
nawet na kartce papieru.
Był
to automat abstrakcyjny, słu
żą
cy do
analizy algorytmów.
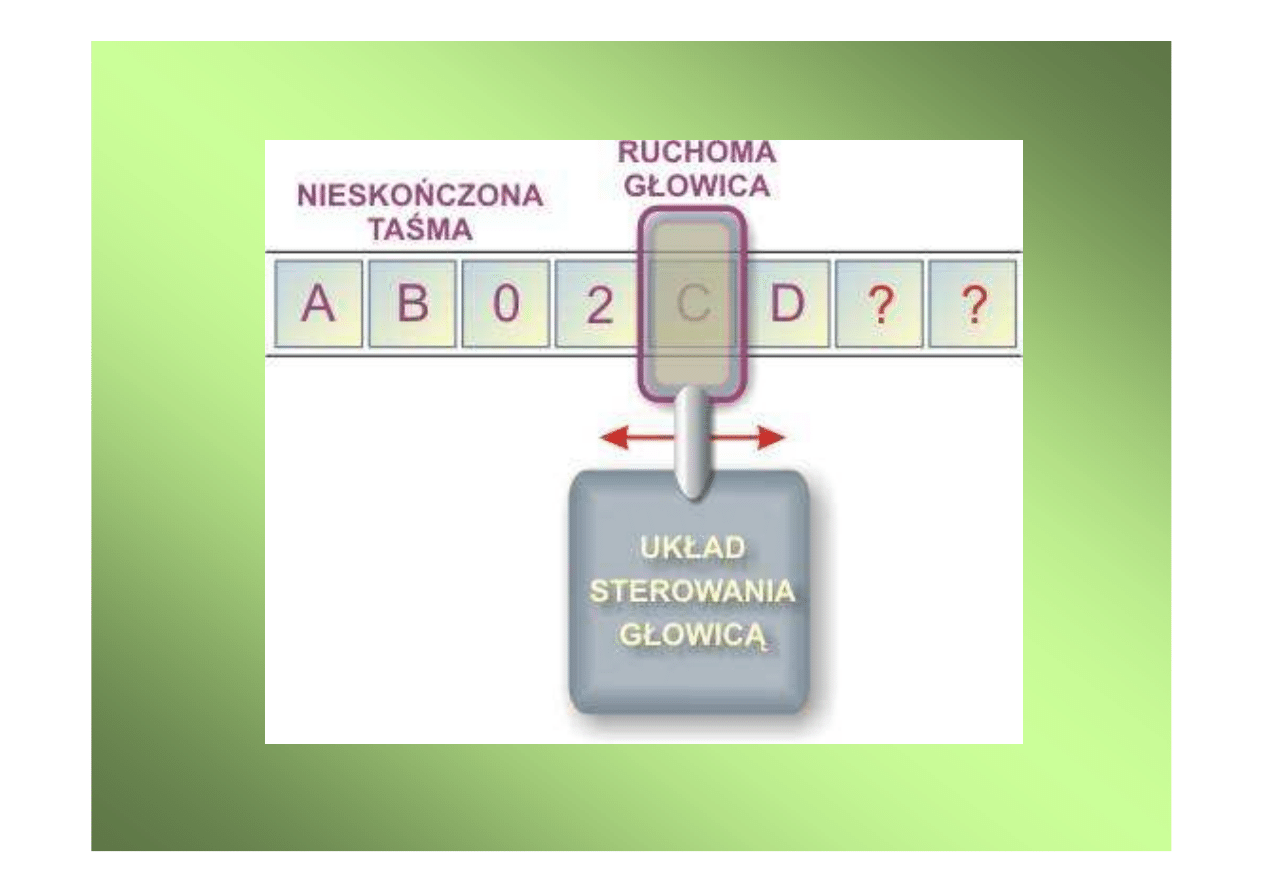
Maszyna Turinga zbudowana jest z trzech
głównych elementów:
1. Niesko
ń
czonej ta
ś
my zawieraj
ą
cej komórki
z przetwarzanymi symbolami.
2. Ruchomej głowicy zapisuj
ą
co-odczytuj
ą
cej.
3. Układu sterowania głowic
ą
.
Niesko
ń
czona ta
ś
ma
jest odpowiednikiem
współczesnej pami
ę
ci komputera. Ta
ś
ma dzieli
si
ę
na komórki, w których umieszczone zostały
symbole, czyli po prostu znaki przetwarzane
przez maszyn
ę
Turinga. Symbole te stanowi
ą
odpowiednik danych wej
ś
ciowych. Maszyna
Turinga odczytuje te dane z kolejnych komórek
i przetwarza na inne symbole, czyli dane
wyj
ś
ciowe.
Wyniki
oblicze
ń
równie
ż
s
ą
zapisywane w komórkach ta
ś
my.
... A A C C D D 0 1 2 3 E F G Z ? ? ...
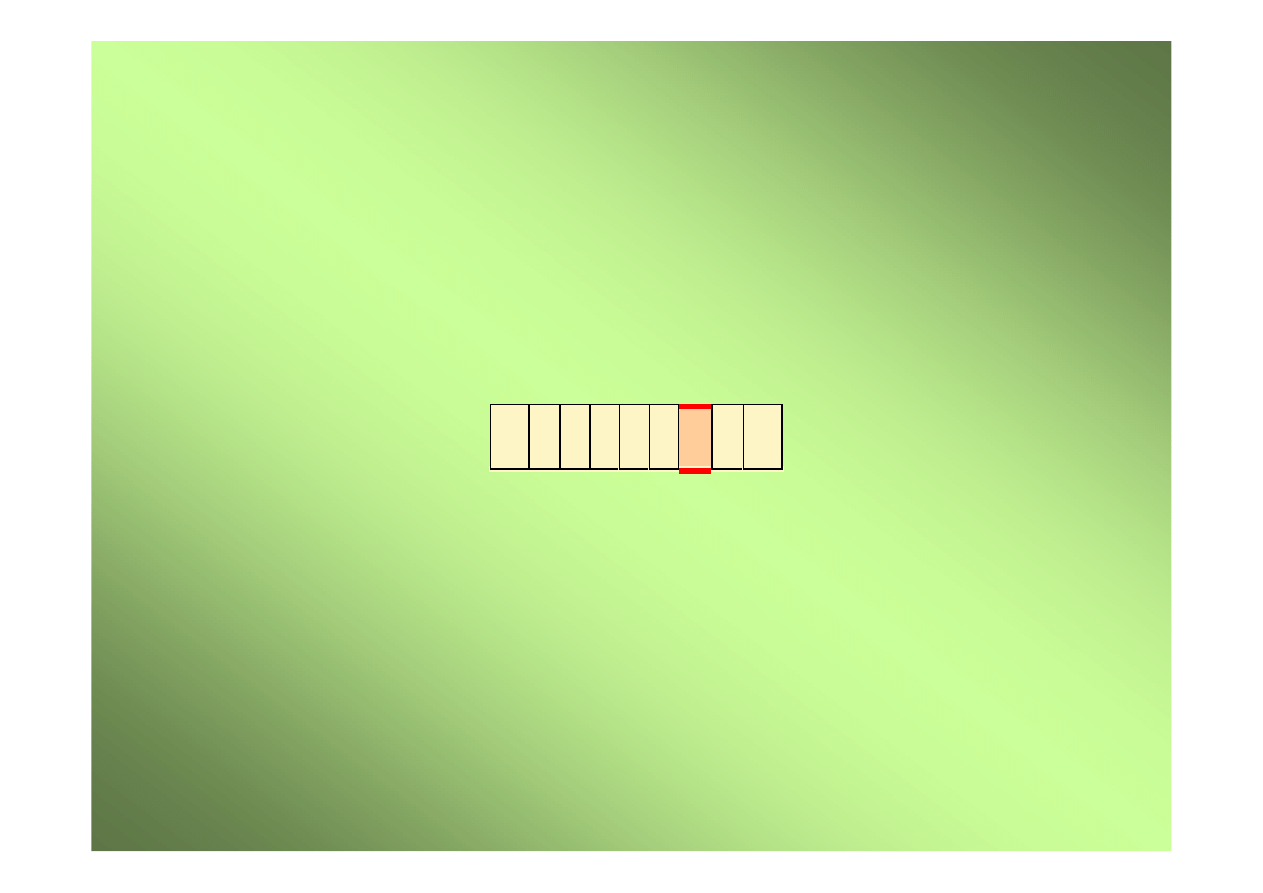
Głowica zapisuj
ą
co – odczytuj
ą
ca
Głowica
ta
odpowiada
funkcjonalnie
urz
ą
dzeniom wej
ś
cia/wyj
ś
cia współczesnych
komputerów lub układom odczytu i zapisu
pami
ę
ci.
Głowica zawsze znajduje si
ę
nad jedn
ą
z komórek ta
ś
my. Mo
ż
e ona odczytywa
ć
zawarto
ść
tej komórki oraz zapisywa
ć
do niej
inny symbol - na tej zasadzie odbywa si
ę
przetwarzanie danych - z jednych symboli
otrzymujemy
inne.
Oprócz
odczytywania
i zapisywania symboli w komórkach głowica
wykonuje ruchy w prawo i w lewo do s
ą
siednich
komórek na ta
ś
mie. W ten sposób mo
ż
e si
ę
ona
przemie
ś
ci
ć
do dowolnie wybranej komórki
ta
ś
my.
Układ sterowania
Układ
sterowania
głowic
ą
zarz
ą
dza
przetwarzaniem informacji. Jego współczesnym
odpowiednikiem jest procesor komputera. Układ
ten odczytuje za pomoc
ą
głowicy symbole
z komórek ta
ś
my oraz przesyła do głowicy
symbole do zapisu w komórkach. Dodatkowo
nakazuje on głowicy przemie
ś
ci
ć
si
ę
do
s
ą
siedniej komórki w lewo lub w prawo.
Podstaw
ą
działania maszyny Turinga s
ą
stany
układu sterowania. Stan układu sterowania
okre
ś
la jednoznacznie jak
ą
operacj
ę
wykona,
oraz jak zareaguje maszyna Turinga, gdy
odczyta z ta
ś
my okre
ś
lony symbol.
Zatem operacje wykonywane przez układ
sterowania zale
żą
od dwóch czynników:
1. Symbolu odczytanego z komórki na ta
ś
mie.
2. Bie
żą
cego stanu układu steruj
ą
cego.
Stany zostały okre
ś
lone kolejnymi nazwami:
q0, q1, q2, ... ,qn, gdzie q0 jest stanem
pocz
ą
tkowym, w którym znajduje si
ę
maszyna
Turinga przed rozpocz
ę
ciem przetwarzania
symboli na ta
ś
mie.
Przyjmijmy nast
ę
puj
ą
c
ą
składni
ę
instrukcji
dla maszyny Turinga:
Instrukcja
maszyny
Turinga
Znaczenia symboli
S
o
- symbol odczytany przez głowic
ę
z
bie
żą
cej komórki na ta
ś
mie
q
i
- bie
żą
cy stan układu sterowania
S
z
- symbol, jaki zostanie zapisany w
bie
żą
cej komórce na ta
ś
mie
q
j
- nowy stan, w który przejdzie układ
sterowania po wykonaniu tej operacji
(S
o
,q
i
,S
z
,q
j
,L/R)
L/R
- ruch głowicy o jedn
ą
komórk
ę
w lewo
(L) lub w prawo (R)
S
0
i q
i
s
ą
tzw. cz
ęś
ci
ą
identyfikacyjn
ą
instrukcji. Maszyna Turinga wykonuje tyle
ró
ż
nych instrukcji, ile zdefiniujemy cz
ęś
ci
identyfikacyjnych - w programie nie mo
ż
e by
ć
dwóch ró
ż
nych instrukcji o identycznej cz
ęś
ci
identyfikacyjnej.
Powód jest oczywisty -
któr
ą
instrukcj
ę
nale
ż
ałoby w takim wypadku wykona
ć
?
S
z
, q
j
i L/R s
ą
tzw. cz
ęś
ci
ą
operacyjn
ą
, która
okre
ś
la
jakie
działanie
podejmuje
dana
instrukcja. Cz
ęś
ci operacyjne ró
ż
nych instrukcji
mog
ą
by
ć
takie same - oznacza to jedynie, i
ż
instrukcje te wykonuj
ą
dokładnie to samo
działanie.
Program dla maszyny Turinga
Aby lepiej zrozumie
ć
działanie maszyny
Turinga, rozwa
ż
my nast
ę
puj
ą
cy program
zło
ż
ony z dwóch instrukcji:
Program
0,q0,1,q0,L bit
0 zamień na 1
1,q0,0,q0,L bit
1 zamień na 0
Przyjmijmy równie
ż
,
ż
e fragment niesko
ń
czonej
ta
ś
my zwiera nast
ę
puj
ą
cy ci
ą
g symboli:
... ? 1 0 1 1 0 ? ...
Symbolem pustym jest znak pytajnika. Dane do
przetworzenia przez program zawarte s
ą
w kolejnych
5 komórkach - 10110.
Załó
ż
my, i
ż
jest to jaka
ś
warto
ść
binarna.
Przed rozpocz
ę
ciem wykonywania programu
ustawiamy głowic
ę
na okre
ś
lonej komórce ta
ś
my.
W tym przypadku niech b
ę
dzie to ostatni symbol
0:
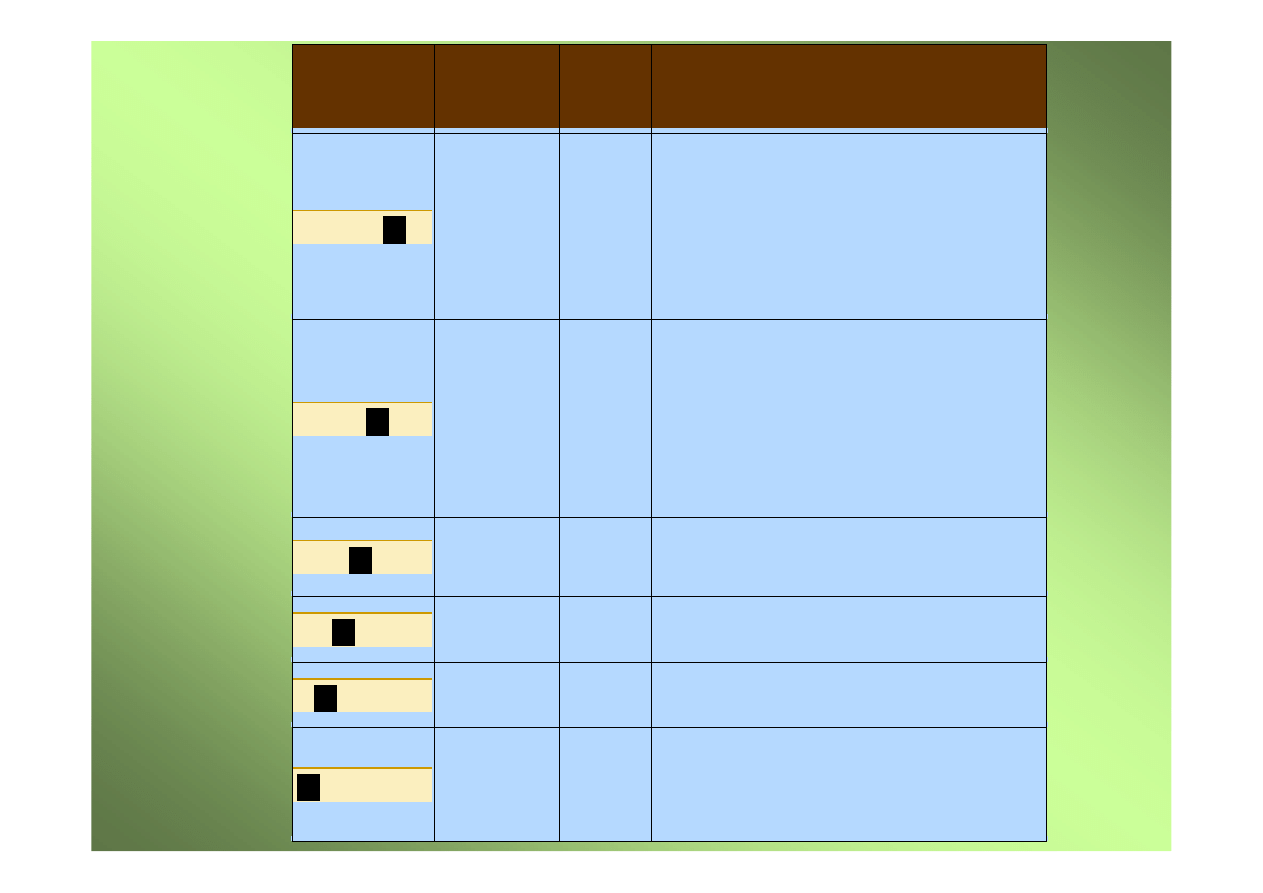
Po uruchomieniu maszyny Turinga obserwujemy
co si
ę
stanie:
... ? 1 0 1 1 0 ? ...
Ta
ś
ma z
głowic
ą
Odczytany
znak
Stan
bie
żą
cy
Wykonywana operacja
? 1 0 1 1
0
?
0
q0
Kombinacja odczytanego znaku i stanu q0
wyznacza instrukcję 0,q0,1,q0,L. Zatem
znak w bieżącej komórce maszyna
Turinga umieści symbol 1, stanu nie
zmieni (
wciąż pozostanie w q0
) i
przemieści głowicę do sąsiedniej komórki
po lewej stronie.
? 1 0 1
1
1 ?
1
q0
Teraz kombinacja odczytanego znaku i
stanu wewnętrznego wyznacza instrukcję
1,q0,0,q0,L. Znak w bieżącej komórce
taśmy zostanie zastąpiony znakiem 0, stan
wewnętrzny nie zmieni się i głowica
będzie przesunięta w lewo do następnej
komórki.
? 1 0
1
0 1 ?
1
q0
To samo, co powy
ż
ej, instrukcja
1,q0,0,q0,L.
? 1
0
0 0 1 ?
0
q0
Instrukcja 0,q0,1,q0,L.
?
1
1 0 0 1 ?
1
q0
Instrukcja 1,q0,0,q0,L
?
0 1 0 0 1 ?
?
q0
Ta instrukcja nie została zdefiniowana,
zatem program zako
ń
czy swoj
ą
prac
ę
Maszyna Turinga,
a współczesny komputer
Odpowiednikiem procesora jest tu głowica,
pami
ę
ci - ta
ś
ma, natomiast diagram przej
ść
mi
ę
dzy
stanami
odpowiada
BIOS-owi,
Windowsowi lub innemu oprogramowaniu.
Przykład:
maszyna realizuj
ą
ca algorytm Euklidesa wyznaczania
NWD (Najwi
ę
kszy Wspólny Dzielnik) dwóch liczb:
function NWD (x0= 24, x1= 9: Word): Word
;
repeat
x
2
:= x
0
mod x
1
;
x
0
:= x
1
;
x
1
:= x
2
;
until (x
2
= 0);
NWD:= x
0
1. x
2
:= 6; x
0
:=9; x
1
:=6;
2. x
2
:= 3; x
0
:=6; x
1
:=3
3. x
2
:= 0; x
0
:=3; x
1
:=0;
4. NWD=3;
2-wymiarow
ą
Turing machine
opracowano w latach
80-tych. Mrówka porusza si
ę
po siatce zawieraj
ą
cej
białe i czarne pola według nast
ę
puj
ą
cych reguł:
1.
Kiedy mrówka znajdzie si
ę
na polu czarnym obraca si
ę
w prawo i przesuwa o jedno pole do przodu.
2.
Kiedy mrówka jest na polu białym, obraca si
ę
w lewo
i przesuwa do przodu o jedno pole.
3.
Kiedy mrówka opuszcza pole zmienia ono kolor.
Test Turinga
Test Turinga to sposób okre
ś
lania zdolno
ś
ci
maszyny
do
posługiwania
si
ę
j
ę
zykiem
naturalnym i po
ś
rednio maj
ą
cym dowodzi
ć
opanowania przez ni
ą
umiej
ę
tno
ś
ci my
ś
lenia
w sposób podobny do ludzkiego. Test ten został
zaproponowany w 1950 roku przez Alana
Turinga. Turing zaproponował ten test w celu
zamiany pełnego emocji i w jego poj
ę
ciu
bezsensownego pytania "Czy maszyny my
ś
l
ą
?"
na pytanie lepiej zdefiniowane, w ramach bada
ń
nad stworzeniem sztucznej inteligencji.
Test Turinga
Test wygl
ą
da nast
ę
puj
ą
co: s
ę
dzia - człowiek -
prowadzi
rozmow
ę
w
j
ę
zyku
naturalnym
z pozostałymi stronami. Je
ś
li s
ę
dzia nie jest
w stanie wiarygodnie okre
ś
li
ć
, czy która
ś
ze
stron jest maszyn
ą
czy człowiekiem, wtedy mówi
si
ę
,
ż
e maszyna przeszła test. Zakłada si
ę
,
ż
e
zarówno człowiek jak i maszyna próbuj
ą
przej
ść
test zachowuj
ą
c si
ę
w sposób mo
ż
liwie zbli
ż
ony
do ludzkiego.
SCHEMAT TESTU TURINGA
Test pochodzi od zabaw polegaj
ą
cych na
zgadywaniu
płci
osoby
znajduj
ą
cej
si
ę
w innym pokoju przy pomocy serii pyta
ń
i odpowiedzi pisanych na kartkach papieru.
W pierwotnym pomy
ś
le Turinga człowiek musiał
udawa
ć
przeciwn
ą
płe
ć
, a test był ograniczony
do pi
ę
ciominutowej rozmowy. Dzi
ś
nie uwa
ż
a si
ę
tych cech za podstawowe i zasadniczo nie
umieszcza w specyfikacji testu Turinga.
Turing oczekiwał,
ż
e maszyny w ko
ń
cu b
ę
d
ą
w stanie przej
ść
ten test. Ocenił,
ż
e około roku
2000 maszyny z pami
ę
ci
ą
o pojemno
ś
ci 109
bitów (około 119 MB) b
ę
d
ą
w stanie oszuka
ć
30% s
ę
dziów w czasie pi
ę
ciominutowego testu.
Przewidywał
równie
ż
,
ż
e ludzie przestan
ą
uwa
ż
a
ć
zdanie
"my
ś
l
ą
ca
maszyna"
za
wewn
ę
trznie sprzeczne. Oceniał,
ż
e uczenie
maszynowe
nabierze
du
ż
ego
znaczenia
w budowaniu wydajnych maszyn. To twierdzenie
jest przez dzisiejszych badaczy sztucznej
inteligencji oceniane jako zasadne.
Spory o to, czy test Turinga we wła
ś
ciwy sposób
definiuje inteligencj
ę
maszynow
ą
(lub "my
ś
lenie
maszynowe") dotyczyły głównie trzech punktów:
1. Maszyna, która przejdzie test Turinga mo
ż
e by
ć
w stanie symulowa
ć
ludzkie zachowanie
konwersacyjne, lecz mo
ż
e to by
ć
znacznie mniej
ni
ż
prawdziwa inteligencja. Maszyna mo
ż
e
zwyczajnie u
ż
ywa
ć
sprytnie wymy
ś
lonych reguł.
Cz
ę
st
ą
ripost
ą
w społeczno
ś
ci zajmuj
ą
cej si
ę
badaniami nad sztuczn
ą
inteligencj
ą
jest
zadanie pytania "A sk
ą
d wiemy czy ludzie sami
po prostu nie posługuj
ą
si
ę
jakimi
ś
sprytnie
wymy
ś
lonymi regułami?".
2. Maszyna mo
ż
e by
ć
inteligentna nie posiadaj
ą
c
ludzkiej umiej
ę
tno
ś
ci prowadzenia rozmowy.
3. Wielu ludzi mogłoby nie by
ć
w stanie zaliczy
ć
takiego testu. Z drugiej strony, inteligencj
ę
innych ludzi oceniamy zazwyczaj wył
ą
cznie na
podstawie tego co i jak mówi
ą
.
Jak dot
ą
d,
ż
aden komputer
nie zaliczył testu Turinga.
Co roku wyznaczana jest Nagroda Loebnera dla
najlepszych zawodników w te
ś
cie Turinga.
Po raz pierwszy ograniczony test Turinga odbył
si
ę
w 1991 roku, w Bosto
ń
skim Muzeum
Komputerów. Sze
ść
komputerów miało udawa
ć
ludzi, a dwie osoby komputery. Wszystkie
terminale poł
ą
czona ze sob
ą
za pomoc
ą
modemów i sieci telefonicznej. Dziesi
ę
ciu
s
ę
dziów podchodziło kolejno do ka
ż
dego
terminala
i
brało
udział
w
konwersacji
z niewiadomym partnerem. Wynik eksperymentu
był zaskoczeniem.
Zwyci
ę
zc
ą
został
program
komputerowy
autorstwa Josepha Weintrauba, który jako temat
rozmów zadeklarował pogaduszki. A
ż
pi
ę
cioro
s
ę
dziów było przekonanych,
ż
e rozmawiało
z człowiekiem. Z kolei specjalista zajmuj
ą
cy si
ę
twórczo
ś
ci
ą
Shakespeara został uznany przez
troje s
ę
dziów za program komputerowy, gdy
ż
zbyt szybko i dokładnie cytował jego dzieła
z pami
ę
ci. Zostało to odebrane jako odczyt
z pami
ę
ci masowej, w której zmagazynowane
zostały teksty utworów.
Maszyna
von Neumana
W roku 1946 John von Neuman (1903-1957),
genialny ameryka
ń
ski uczony w
ę
gierskiego
pochodzenia (przede wszystkim matematyk, ale
tak
ż
e
chemik,
fizjolog,
biolog,
fizyk
i filozof) okre
ś
lił zasady, według których powinno
si
ę
konstruowa
ć
komputery. Zasady te wytyczyły
nowy kierunek w historii komputerów i s
ą
stosowane do dnia dzisiejszego.
John von Neumann
Zasady von Neumana mo
ż
na zawrze
ć
w trzech
punktach:
1.
instrukcje
i
dane
maj
ą
by
ć
identycznie
reprezentowane w maszynie;
2.
program i dane musz
ą
mie
ś
ci
ć
si
ę
w tej samej
wewn
ę
trznej pami
ę
ci (operacyjnej) komputera;
3.
dzi
ę
ki jednakowej reprezentacji danych i instrukcji
maszyna powinna móc wykonywa
ć
operacje na
instrukcjach i całym programie.
Tak
ą
architektur
ę
komputera nazywano sterowan
ą
programem. Wobec tak sformułowanej definicji
komputera ENIAC wszystkie poprzedzaj
ą
ce go
maszyny nie były komputerami.
Maszyna von Neumanna była komputerem w pełni
automatycznym,
cyfrowym
i
uniwersalnym,
z
wczytywanym
programem.
Jej
wewn
ę
trzna
architektura stała si
ę
wzorem dla komercyjnych maszyn
nast
ę
pnej generacji. Komputer posłu
ż
ył do wykonania
wielu oblicze
ń
z dziedziny abstrakcyjnej matematyki,
fizyki i
meteorologii. Pomógł
zbada
ć
wewn
ę
trzn
ą
struktur
ę
gwiazd
i
stabilno
ść
orbit
cz
ą
stek
w
akceleratorach.
Był
naprawd
ę
uniwersalny.
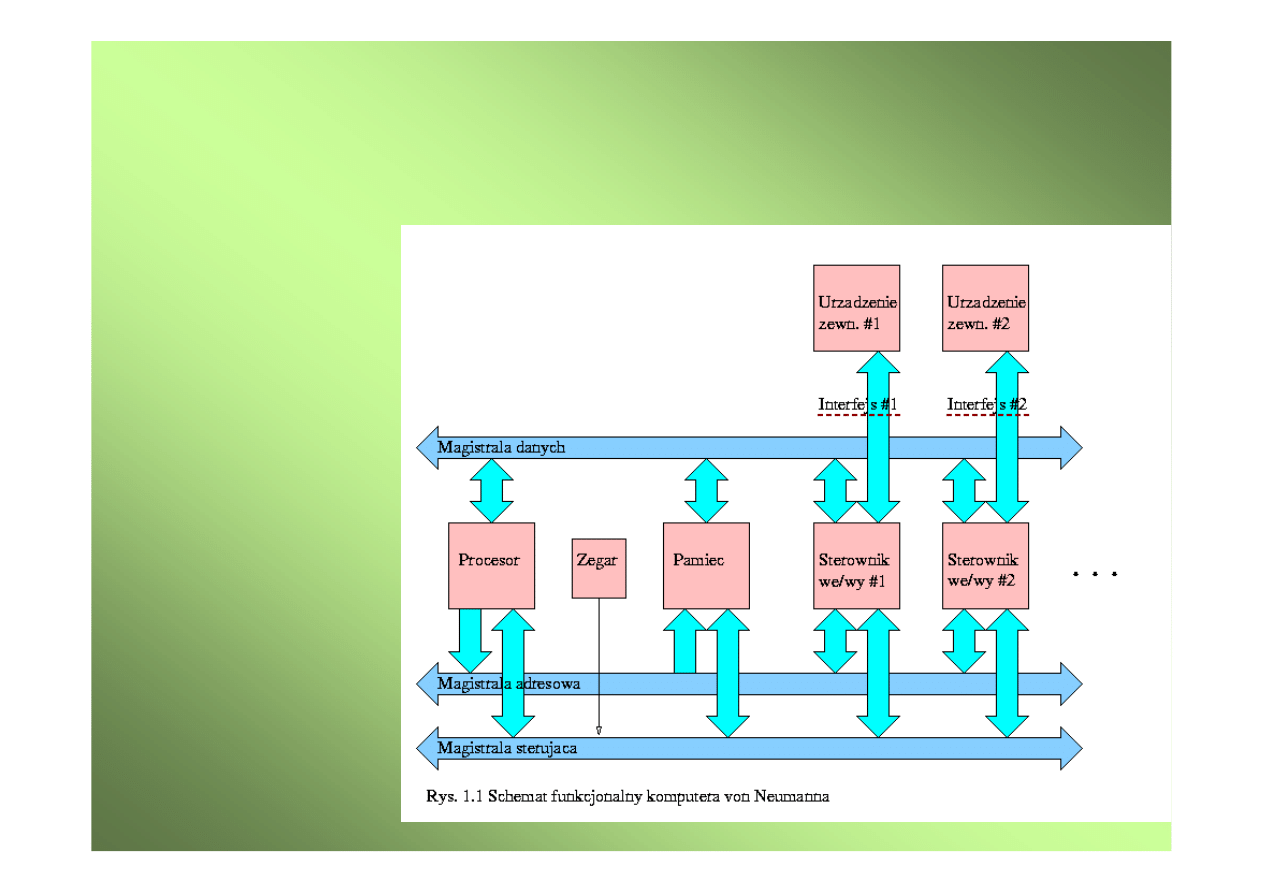
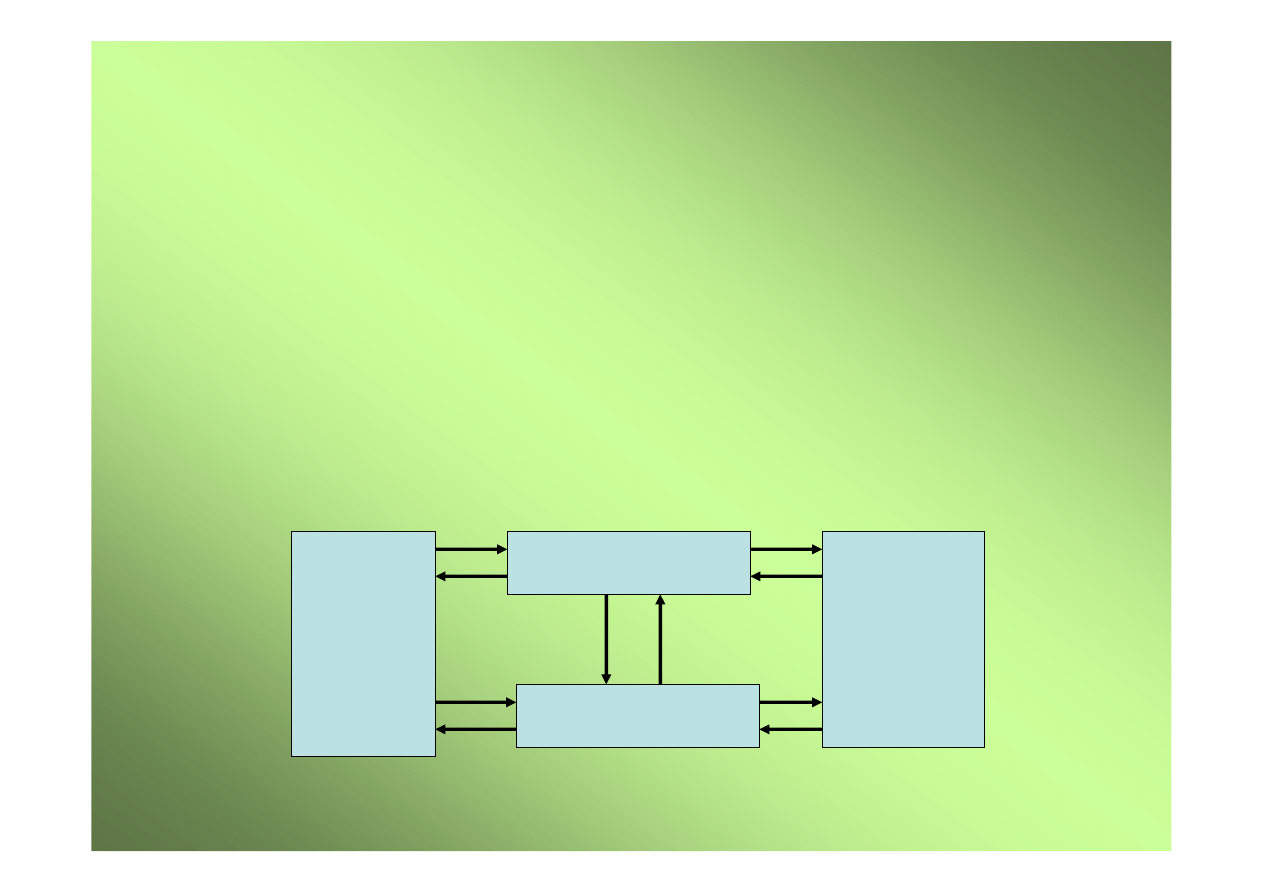
Schemat funkcjonalny komputera
von Neumanna
idea komputera sterowanego programem
Opis schematu maszyny
von Neumanna
• Procesor
• Pami
ęć
• Zegar
• Magistrale
• Wej
ś
cie/Wyj
ś
cie
Procesor (ang. processor) -
układ
dokonuj
ą
cy
operacji
na
danych
zgromadzonych w pami
ę
ci lub płyn
ą
cych z/do
urz
ą
dze
ń
wej
ś
cie/wyj
ś
cie,
sterowany
programem, którego kod znajduje si
ę
w pami
ę
ci.
Do przechowywania swojego wewn
ę
trznego
stanu procesor wyposa
ż
ony jest w pewn
ą
ilo
ść
rejestrów.
Do najwa
ż
niejszych rejestrów procesora nale
żą
:
•
Wska
ź
nik instrukcji (ang. instruction pointer)
-
wskazuje komórk
ę
pami
ę
ci, z której pobrany b
ę
dzie
nast
ę
pna instrukcja do wykonania.
•
Rejestr flag stanu (ang. flag register, flags) - składaj
ą
si
ę
na niego jednobitowe flagi przechowuj
ą
ce
informacje o stanie procesora (np. dopuszczalno
ś
ci
przerwa
ń
) lub rezultacie ostatnio wykonanej instrukcji.
• Wska
ź
nik stosu (ang. stack pointer) - wskazuje
pierwsz
ą
woln
ą
komórk
ę
pami
ę
ci na stosie
procesora - strukturze danych typu FILO (ang.
first in last out - pierwszy przyszedł, ostatni
wyszedł) wykorzystywanej przy skokach do
podprogramów dla przechowywania adresu
powrotu i zmiennych lokalnych.
• Akumulator (ang. accumulator) - słu
ż
y jako
argument a zarazem miejsce umieszczania
rezultatów operacji arytmetycznych.
Pami
ęć
(pami
ęć
operacyjna,
ang. memory) -
przechowuje dane i kod prgramu. Je
ż
eli jej
konstrukcja
umo
ż
liwia
oprócz
odczytu
dokonywanie w niej modyfikacji nazywamy j
ą
RAM (ang. random access memory), je
ś
li jej
konstrukcja
pozwala
jedynie
na
odczyt
nazywana jest ROM (ang. read only memory).
Pami
ęć
dzieli si
ę
na komórki, z których
ka
ż
da jest w stanie przechowa
ć
liczb
ę
całkowit
ą
z ustalonego dla danej architektury zakresu.
Najcz
ęś
ciej jest to 0, 1,...,255. Do zakodowania
takich liczb potrzeba 8 bitów tj. 1 bajt. Ka
ż
da
komórka pami
ę
ci posiada unikalny numer zwany
adresem fizycznym, który słu
ż
y procesorowi do
odwoływania si
ę
do niej.
Zegar
odmierza cykle wykonywania instrukcji
programu.
Magistrale (ang. buses) -
słu
żą
do przesyłania danych i synchronizacji elementów
komputera:
1. Magistrala danych (ang. data bus) słu
ż
y do przesyłania
danych
mi
ę
dzy
pami
ę
ci
ą
,
układami
we/wy,
a procesorem. Ilo
ść
u
ż
ytych tutaj linii (szeroko
ść
szyny)
jest równa długo
ś
ci słowa maszynowego i jest równa
rozmiarowi
komórki
pami
ę
ci,
lub
jest
jego
wielokrotno
ś
ci
ą
.
2. Magistrala
adresów
(ang.
address
bus)
słu
ż
y
procesorowi do wysyłania numerów komórek pami
ę
ci
lub rejestrów we/wy na których b
ę
dzie dokonane
nast
ę
pne przesłanie danych. Ilo
ść
u
ż
ytych tutaj linii
decyduje o ilo
ś
ci pami
ę
ci jak
ą
mo
ż
na zaadresowa
ć
.
3. Magistrala steruj
ą
ca
(ang. control bus) słu
ż
y do
wzajemnej
synchronizacji
oraz
przekazywania
i potwierdzania przyj
ę
cia/wykonania zlece
ń
.
Wej
ś
cie/Wyj
ś
cie
Pozwala
komputerowi
kontaktowa
ć
si
ę
z zewn
ę
trznym
ś
wiatem (klawiatura, monitor,
czytniki,
adaptery
sieciowe
itp)
lub
przechowywa
ć
dane poza pami
ę
ci
ą
operacyjn
ą
(dyski).
Na wej
ś
cie/wyj
ś
cie składaj
ą
si
ę
nast
ę
puj
ą
ce
układy i urz
ą
dzenia
:
1. Sprz
ę
towe sterowniki wej
ś
cia - wyj
ś
cia.
Układy te potrafi
ą
si
ę
porozumiewa
ć
z
procesorem
poprzez
rejestry
we/wy,
przerwania, kanały DMA i własn
ą
adresowaln
ą
przez procesor pami
ęć
układu. Wykonuj
ą
c
zlecenia
procesora
steruj
ą
urz
ą
dzeniami
wej
ś
cia
wyj
ś
cia.
W
technologii
mikrokomputerowej s
ą
montowane jako karty
rozszerzaj
ą
ce wewn
ą
trz obudowy komputera.
2. Urz
ą
dzenia zewn
ę
trzne - zapewniaj
ą
kontakt
komputera
ze
ś
wiatem.
Mog
ą
to
by
ć
klawiatury, monitory, dyski, drukarki, modemy
ale tak
ż
e czujniki i ramiona robotów w procesie
produkcyjnym.
3. Interfejsy. Interfejs jest to specyfikacja sposobu
przesyłania
danych
mi
ę
dzy
dwoma
urz
ą
dzeniami.
Poj
ę
cie
to
bywa
cz
ę
sto
przenoszone na realizacj
ę
sprz
ę
tow
ą
interfejsu
w postaci gniazd, wtyków i kabli. Bywa te
ż
rozszerzane
na
komunikacj
ę
człowiek-
maszyna,
mówimy
wtedy
o
interfejsie
u
ż
ytkownika.
Pierwsze pokolenie komputerów
•
przeznaczone do rozwi
ą
zywania jednego zadania w trybie
pasywnym
•
algorytm posiada stał
ą
struktur
ę
i jest wykonywany
sekwencyjnie
•
funkcjonowanie okre
ś
lone zostaje na etapie projektowania
•
brak systemu operacyjnego
•
budowane w oparciu o lampy elektronowe
•
funkcjonowały w latach 1945-1954
jednostka arytmetyczno-logiczna
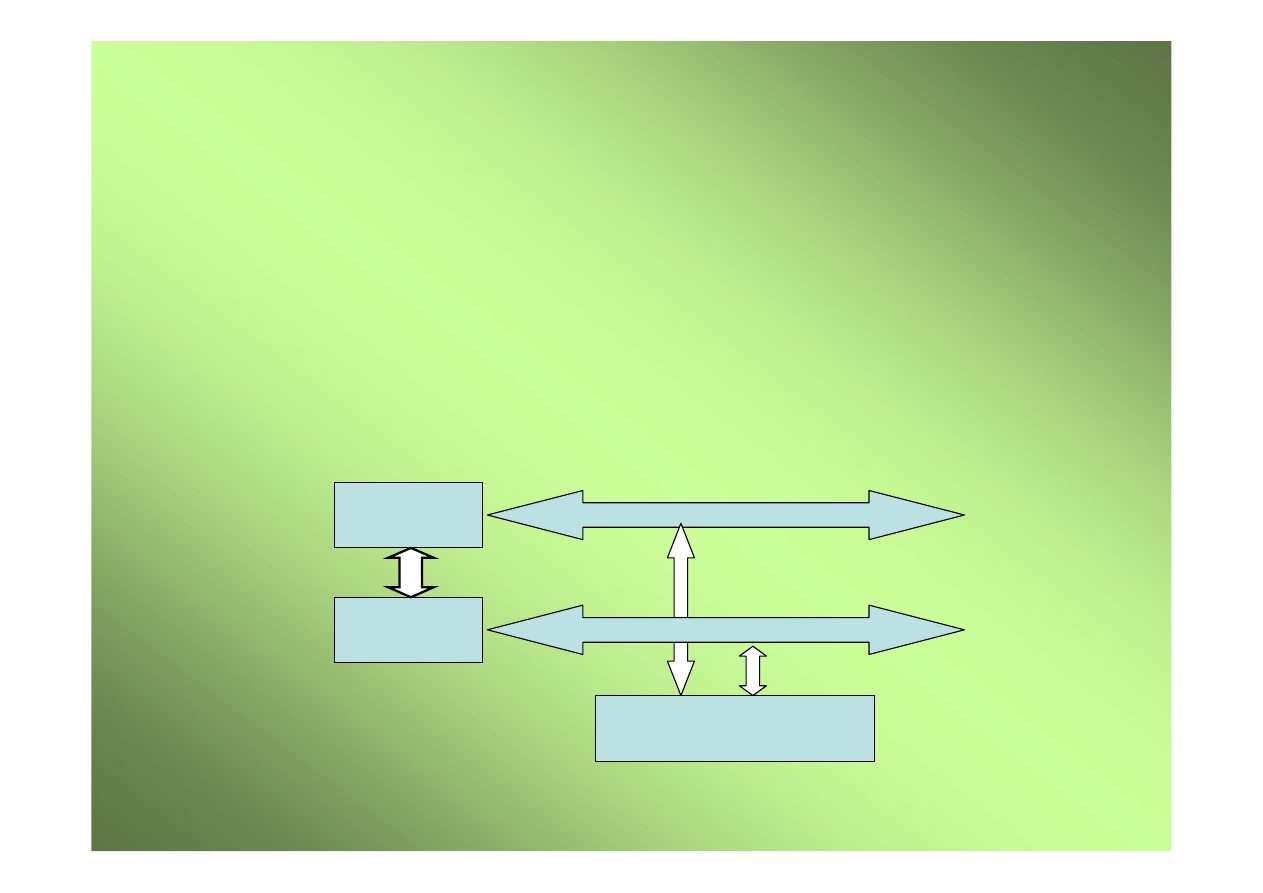
Struktura komputerów pierwszego pokolenia
Pami
ęć
główna
Urz
ą
dzenia
wej
ś
cia-wyj
ś
cia
ALU
Jednostka steruj
ą
ca
Drugie pokolenie komputerów
•
przeznaczone do rozwi
ą
zywania wielu zada
ń
w trybie pasywnym
•
zastosowano algorytm szeregowo-równoległy (elementy
współbie
ż
no
ś
ci)
•
zastosowano prosty system operacyjny (tzw. monitor)
•
wykorzystanie pierwszych j
ę
zyków programowania
•
po raz pierwszy zastosowano pami
ęć
wirtualn
ą
•
budowane w oparciu o tranzystory
•
funkcjonowały w latach 1955-1964
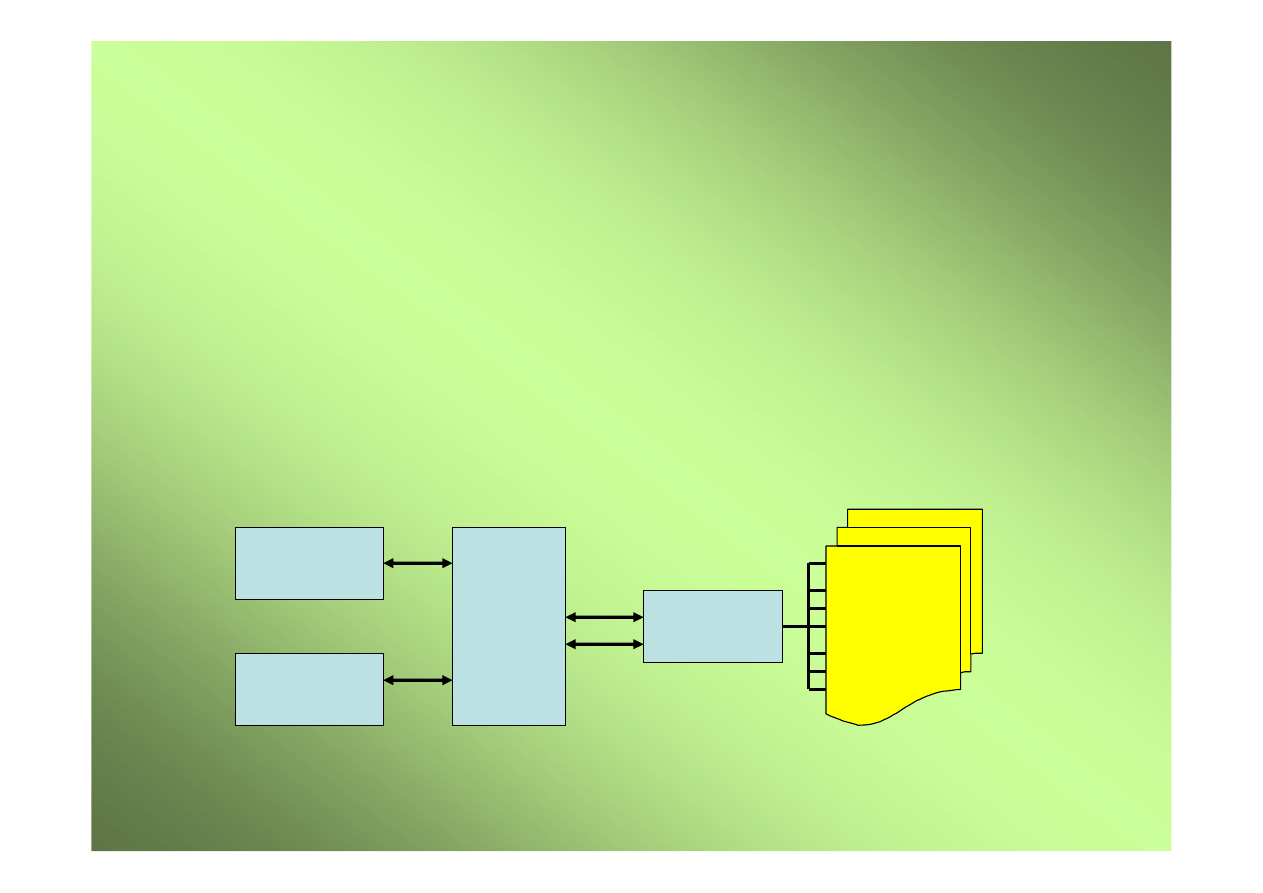
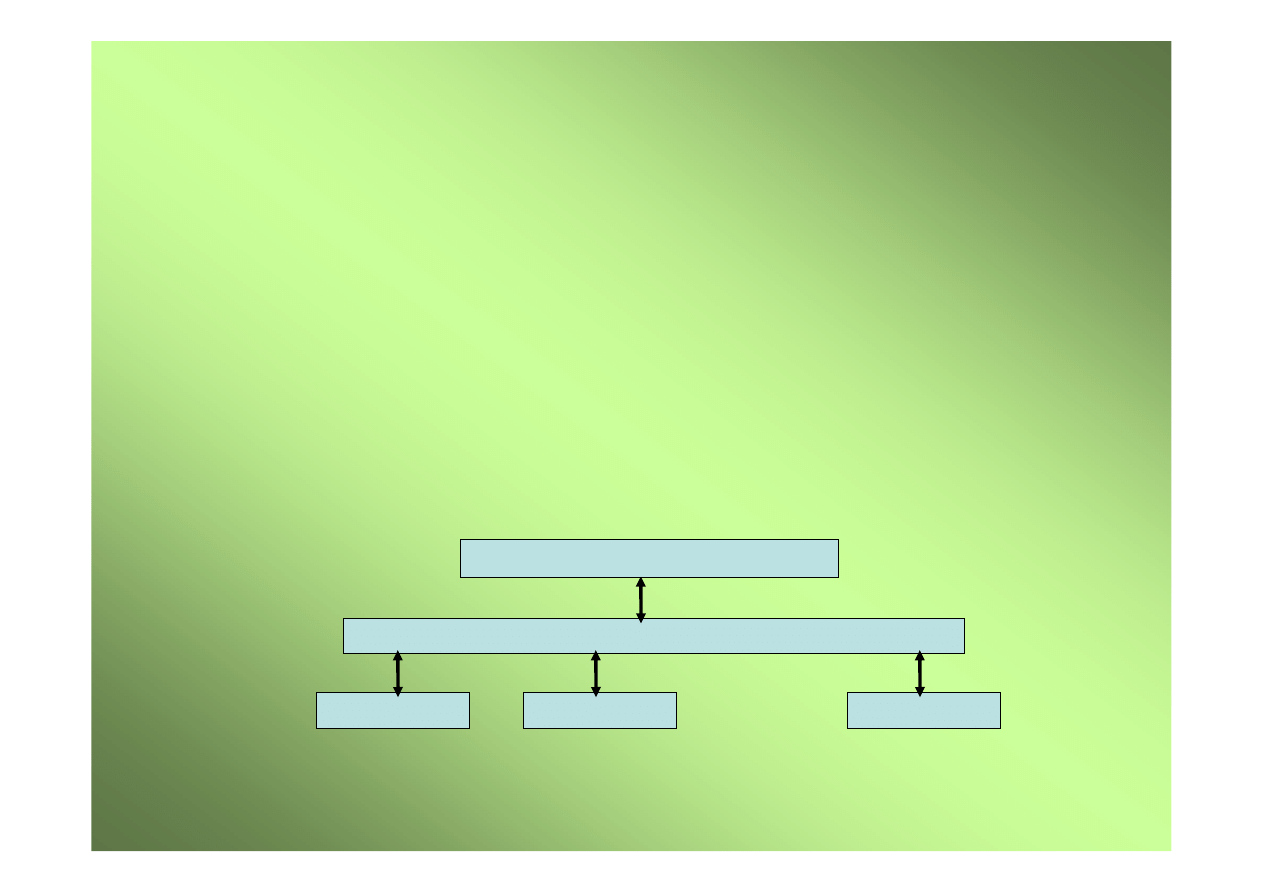
Struktura komputerów drugiego pokolenia
Procesor
centralny
Pami
ęć
Multi-
plekser
Kanały
danych
Urz
ą
dzenia
peryferyjne
Trzecie pokolenie komputerów
•
wykorzystywały algorytm sterowania, pozwalaj
ą
cy r
ę
cznie
zmienia
ć
struktur
ę
maszyny
•
rozwini
ę
to wieloprogramowalno
ść
i zastosowano podział czasu
•
zastosowano tryb interakcyjny
•
wykorzystanie j
ę
zyków wysokiego poziomu
•
do budowy wykorzystywano układy scalone małego i
ś
redniego
stopnia scalania
•
funkcjonowały w latach 1955-1964
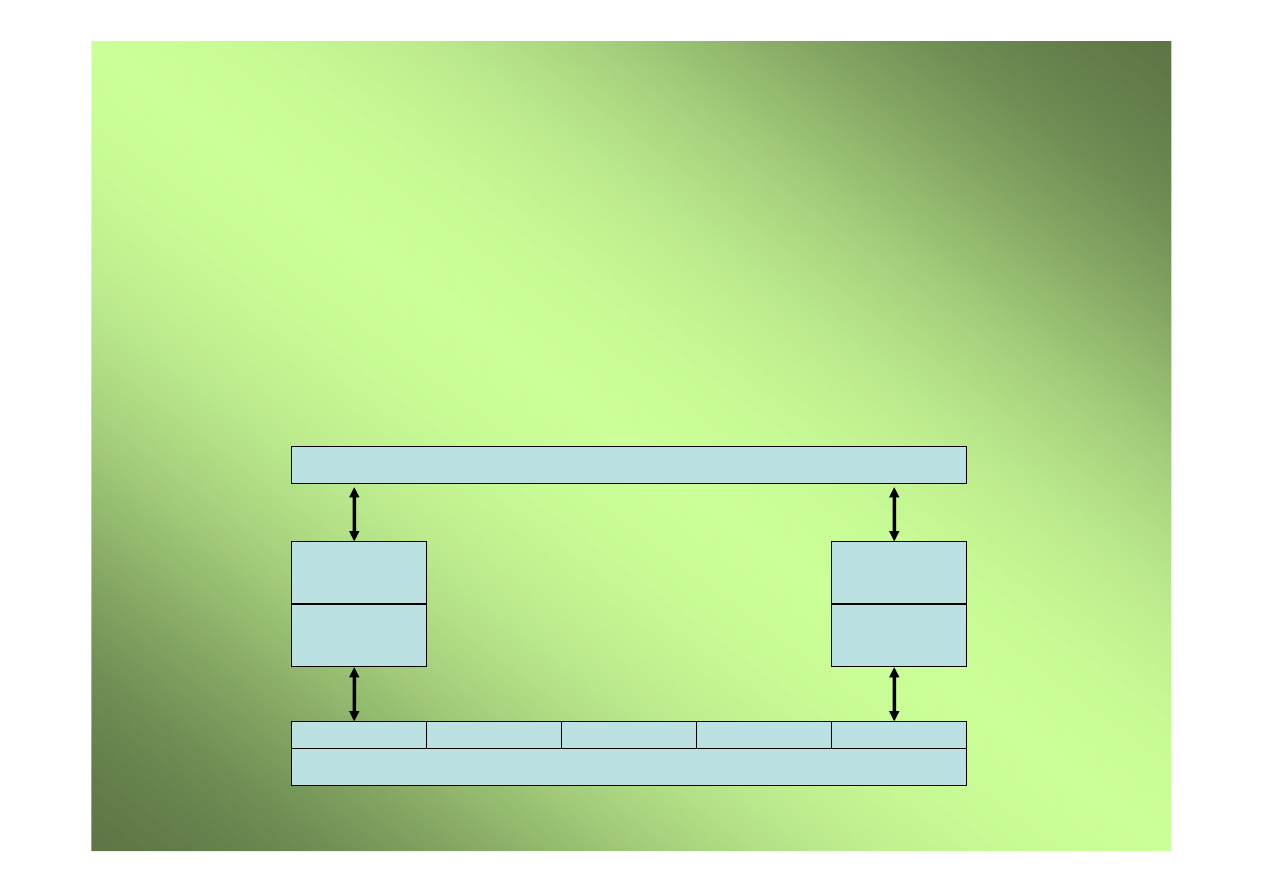
Struktura komputerów trzeciego pokolenia
Procesor
centralny
Pami
ęć
operacyjna
Interfejs pami
ę
ci
Kanały
danych
Interfejs procesora
Czwarte pokolenie komputerów
•
Algorytm sterowania procesem obliczeniowym pozwala na równoległe
rozwi
ą
zywanie szeregu problemów
•
Struktura systemu automatycznie dostosowuje si
ę
do struktury
rozwi
ą
zywanego zadania
•
W celu zwi
ę
kszenia szybko
ś
ci szerzej zastosowano sprz
ę
towe metody
rozwi
ą
zywania niektórych problemów
•
Budowane w oparciu o układy scalone o du
ż
ym stopniu integracji
•
U
ż
ywane w latach 1970-1990
Pami
ęć
operacyjna
Sie
ć
poł
ą
cze
ń
Procesor n
Procesor 1
Procesor 2
.......
Piąte pokolenie komputerów
•
Pozwala rozwi
ą
zywa
ć
bardzo skomplikowane zadania
•
Algorytm sterowania dopuszcza zmian
ę
struktury systemu
obliczeniowego w trakcie rozwi
ą
zywania zadania
•
U
ż
ywane j
ę
zyki programowania coraz bardziej zbli
ż
aj
ą
si
ę
do
j
ę
zyka naturalnego
•
Wybrane funkcje realizuje si
ę
sprz
ę
towo
Sie
ć
poł
ą
cze
ń
Procesor
skalarny
Pami
ęć
operacyjna
Układy wej
ś
cia wyj
ś
cia
Procesor
wektorowy
Pami
ęć
operacyjna
..........
Architektura komputera pi
ą
tego pokolenia
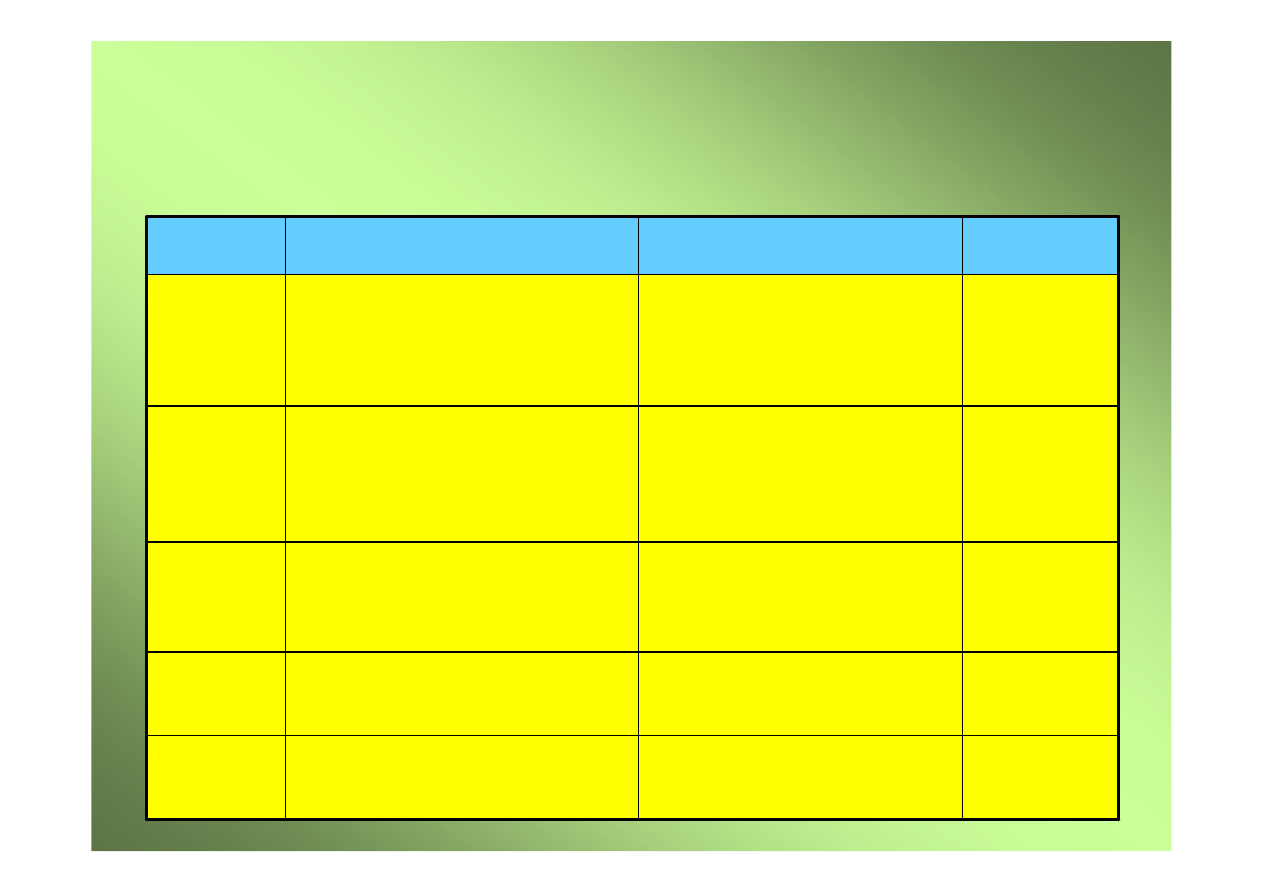
Pięć pokoleń komputerów - zestawienie
Cray MPP
Intel Paragan
VPP500
J
ę
zyk Java. WWW.
Przetwarzanie równoległe
Układy scalone (ULSI)
Architektura skalowalna
Pi
ą
te
1991-.....
VAX 9000
Cray X-MP
IBM 3090
Wieloprocesorowo
ść
J
ę
zyki Ada, Modula
Ś
rodowisko dla pracy równoległej
Układy scalone (LSI oraz VLSI)
Pami
ę
ci półprzewodnikowe
Superkomputery wektorowe
Czwarte
1975-1990
IBM 360/370
CDC 6600
TI-ASC
PDP-8
Wieloprogramowo
ść
i podział czasu
J
ę
zyki PL/I, C, Cobol
Rozbudowany SO
Praca interaktywna
Układy scalone (SSI oraz MSI)
Pami
ęć
cache
Mikroprogramowanie, potokowanie
Trzecie
1965-1974
IBM 7090
CDC 1604
Univac LARC
Elementy wieloprogramowo
ś
ci
J
ę
zyki Algol, Fortran – kompilatory
Monitory (protoplasta SO)
Tranzystory
Dyskretne pami
ę
ci rdzeniowe
Arytmetyka zmiennopozycyjna
Procesory we/wyj
Dzielony dost
ę
p do pami
ę
ci
Drugie
1955-1964
ENIAC
Pronceton IAS
IBM 701
Tryb jednou
ż
ytkownikowy wsadowy
J
ę
zyki maszynowe
Brak podprogramów
We/wy obsługiwane przez procesor
centralny
Lampy elektronowe,
Pami
ęć
na liniach opó
ź
niaj
ą
cych,
Procesor centralny sterowany przez
licznik rozkazów i akumulator
Arytmetyka stałopozycyjna
Pierwsze
1945-1954
Przykłady
Oprogramowanie
I aplikacje
Technologia
i architektura
Pokolenie
Ź
ródło: M. Hajder i inni „Informatyka.Wirtualna podró
ż
w
ś
wiat systemów i sieci komputerowych
Cechy współczesnych systemów
komputerowych
Systemem komputerowym nazywamy zbiór wzajemnie
powi
ą
zanych wzajemnie elementów (komputer,
urz
ą
dzenia peryferyjne, oprogramowanie) których
współdziałanie pozwala osi
ą
gn
ąć
zadany cel
• Wielofunkcyjno
ść
– przystosowanie do realizacji
ró
ż
norodnych zada
ń
(uniwersalno
ść
)
• Zło
ż
ono
ść
– wysoki stopie
ń
skomplikowania sprz
ę
tu i
oprogramowania
• Hierarchiczno
ść
– podział na etapy, umo
ż
liwia rozbicie
przetwarzania
• Spójno
ść
– systemu nie da si
ę
rozbi
ć
na niezale
ż
ne
funkcjonalne elementy
• Rozproszenie – informacja przetwarzana w ró
ż
nych
miejscach (tam gdzie powstaje)
Cechy współczesnych systemów
komputerowych
• Zmienno
ść
struktury – mo
ż
liwo
ść
dostosowania
systemu do zadania
• Niezawodno
ść
– bezawaryjno
ść
, mo
ż
liwo
ść
odtworzenia danych w razie uszkodzenia
• Kontrola i diagnostyka – dost
ę
pno
ść
narz
ę
dzi
diagnostycznych
• Niejednorodno
ść
– ró
ż
norodno
ść
w działaniu
(nie przeszkadzaj
ą
ca we współpracy)
• Równoległo
ść
– mo
ż
liwo
ść
jednoczesnej pracy
wielu elementów przetwarzaj
ą
cych
• Otwarto
ść
systemu – mo
ż
liwo
ść
jego rozbudowy
• Moc obliczeniowa
Wyszukiwarka
Podobne podstrony:
ćw1 Maszyna turinga
Maszyna Turinga
Automaty?strakcyjne maszyna Turinga
MASZYNA TURINGA A UMYSŁ LUDZKI
maszyna Turinga id 281783 Nieznany
3 Maszyna Turinga
Kubity i kot Schrödingera Od maszyny Turinga do komputerów kwantowych
złożoność obliczeniowa algorytmu Maszyny Turinga
3 maszyna turinga
maszyna Turinga przyklady id 28 Nieznany
ćw1 Maszyna turinga
Maszyna Turinga
Maszyna Turinga,v1 1
więcej podobnych podstron