
Akademia Górniczo-Hutnicza im. Stanisława Staszica
w Krakowie
Wydział Inżynierii Mechanicznej i Robotyki
Podstawy Konstrukcji Maszyn 2
Projekt nr 4 – Przekładnia
Wykonał:
Tomasz Siudak
Grupa 5
1
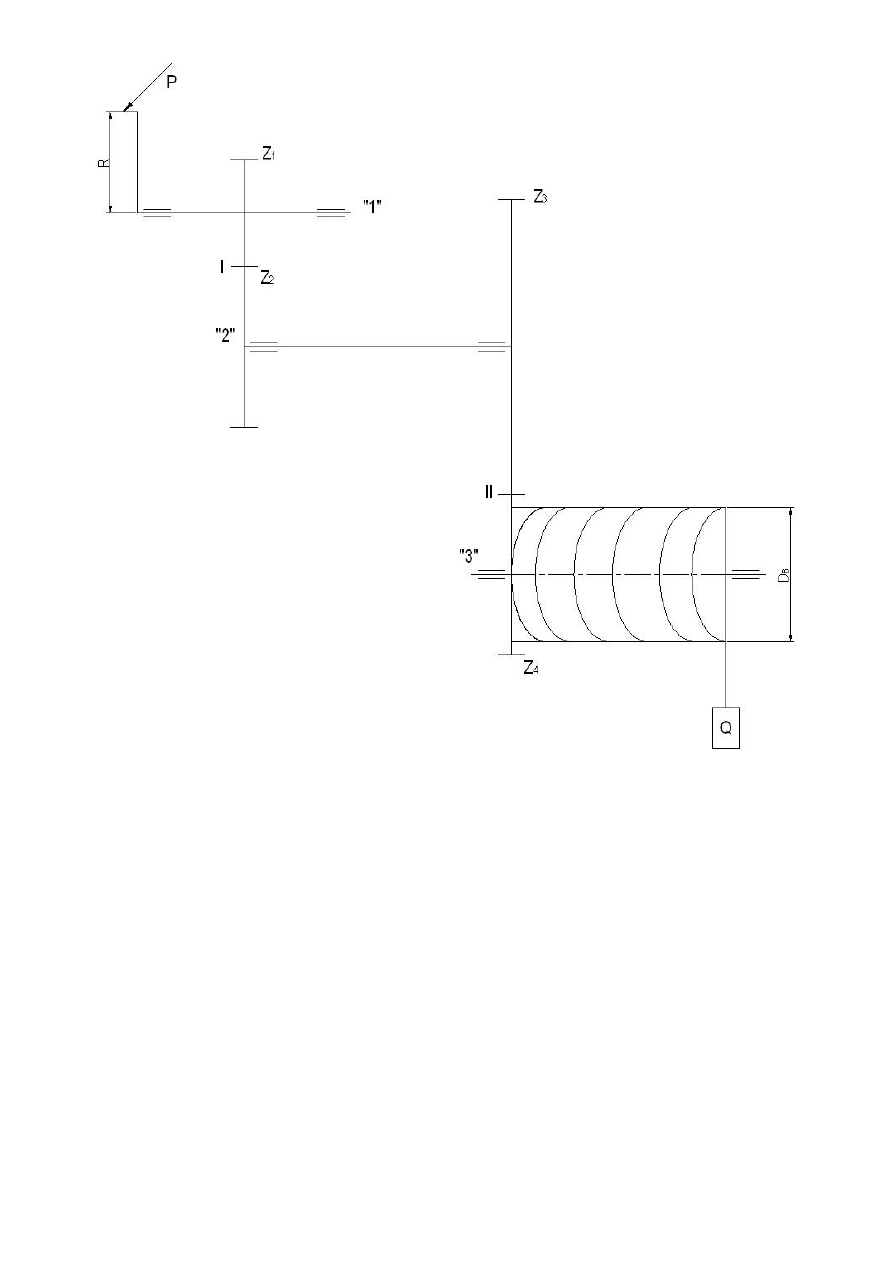
Temat: Obliczyć parametry kół zębatych przekładni zębatej otwartej dla danych wg
podanego schematu przekładni:
250
P
N
=
,
380
R
mm
=
,
14
Q
kN
=
,
440
B
D
mm
=
6
I
i
≤
,
,
6
II
i
≤
1
14
z
≤
2
Dane Obliczenia Wynik
1. Założenia projektowe
Projektowana przekładnia, jest przekładnią zębatą otwartą
- liczba cykli nie jest duża
- przekładnia jest napędzana siłą rąk ludzkich w związku z czym,
prędkości obrotowe są niskie stosuje koła zębate o zębach prostych
- produkcja przekładni jednostkowa
20
α
=
D
0
β
=
D
Wał z kołami zębatymi będzie ułożyskowany symetrycznie, w związku
z czym względną szerokość przekładni w odniesieniu do średnicy
podziałowej
1
d
b
d
ϕ
=
zaleca się przyjmować w granicach
(
)
0,8 1,6
÷
Zbyt dużo niewiadomych we wstępnej fazie obliczeń zmusza nas do
przyjęcia wartości przybliżonych, empirycznie sprawdzonych, a
mianowicie:
- względną długość zęba
λ przyjmuje się zwykle w granicach
6 15
b
m
λ
=
= ÷ w przekładniach ogólnego zastosowania, chociaż w
zastosowaniach specjalnych zdarzają się wyjątki.
Przyjmuję:
10
b
m
λ
=
=
2. Mechanika obciążeń
2.1 Obliczanie momentów obrotowych na wałach „1” i „3”
1
M
P R
= ⋅
1
250
0,38
95
M
N
m
N
=
⋅
=
m
3
14
0,22
3,08
2
B
D
M
Q
kN
m
k
= ⋅
=
⋅
=
Nm
2.2 Całkowite przełożenie przekładni
3
1
c
c
M
M i
η
=
⋅ ⋅ gdzie:
c
i - całkowite przełożenie przekładni
c
η
- sprawność przekładni (dla przekładni zębatych przyjmuje się
95%
c
η
=
)
3
1
3080
95 0,95
c
c
c
M
i
i
M
η
=
⇒ =
⋅
⋅
34,13
c
i
=
2.3 Przełożenia poszczególne
c
I
I
i
i i
I
= ⋅
przyjmuję
6
I
i
=
34,13
6
c
II
II
I
i
i
i
i
= ⇒
=
5,69
II
i
=
2.4 Dobór ilości zębów dla kół zębatych pierwszego stopnia przełożenia
3
Przyjmuję
1
14
z
=
wobec, czego
2
1
I
z
z i
= ⋅
2
14 6 84
z
=
⋅ =
2.5 Dobór ilości zębów dla kół zębatych drugiego stopnia przełożenia
Przyjmuje
3
17
z
=
4
3
II
z
z i
= ⋅
4
17 5,69 96,73
z
=
⋅
=
Przyjmuję
4
97
z
=
2.4 Graniczna liczba zębów
Teoretyczna graniczna liczba zębów
g
z - najmniejsza liczba zębów,
przy której nie wystąpi jeszcze podczas nacinania koła zębatego,
podcięcie zęba oblicza się z zależności:
2
0
2
sin
g
z
α
=
Dla
20
α
=
D
17
g
z
=
Przy
g
z
z
< występuje podcięcie zęba u podstawy. Ponieważ w praktyce
dopuszcza się nieznaczne podcięcie niepowodujące jeszcze ujemnych
skutków, wprowadza się tzw. praktyczną graniczną liczbę zębów
,
g
z
określoną zależnością:
,
5
6
g
g
z
=
4
z , dla
20
α
=
D
,
14
g
z
=
2.5 Współczynnik przesunięcia zarysu
Pomimo tego że liczba zębów
14
z
=
jest jeszcze dopuszczalna to
jednak zakładam że nawet minimalne podcięcie zarysu jest
niedopuszczalne, w związku z powyższym należy zastosować
przesunięcie zarysu zęba dla pierwszego koła zębatego.
Współczynnik granicznego przesunięcia zarysu
x
jest równy:
1
1
1
17 14
17
g
g
g
g
z
z
x
x
z
−
−
=
⇒
=
1
0,18
g
x
=
- powyżej tej wielkości następuje niedopuszczalne
zaostrzenie zębów.
Przyjmuję
1
0,18
x
=
3. Dobór materiałów
3.1 Materiał zębnika
Na materiał zębnika dobieram stal C55 wg PN-EN 10083-2+11:1999 w
stanie ulepszonym cieplnie (QT)
550
e
R
MPa
=
800 950
m
R
MPa
=
÷
Twardość:
260
HB
1
0,8
440
FP
e
R
MPa
σ
=
⋅
=
3.2 Materiał koła zębatego
Na koło zębate dobieram stal C45 wg PN-EN 10083-2+11:1999 w
stanie ulepszonym cieplnie (QT)
490
e
R
MPa
=
700 850
m
R
MPa
=
÷
Twardość
240HB
2
0,8
390
FP
e
R
MPa
σ
=
⋅
=
4. Wstępne obliczenia modułu
Dominujące niebezpieczeństwo zniszczenia przekładni pochodzi od
złamania zębów, w związku z powyższym należy zastosować
odpowiednio duży moduł, aby zmniejszyć naprężenia zginające u
podstawy zęba.
g
F
FS
F
Y
b m
FP
σ
σ
=
⋅
≤
⋅
Znam moment skręcający na kole czynnym, więc przyjmuję:
1
1
n
d
m
z
=
⋅ oraz
n
b
m
λ
= ⋅
Zależność na moduł przybiera postać:
1
3
1
1
1
2
F
FS
FP
M K
m
Y
z
Y Y
ε
β
λ
σ
⋅
⋅
≥
⋅
⋅
⋅ ⋅
⋅
, gdzie:
1
M - moment obrotowy na wale „1”
F
σ
- rzeczywiste naprężenia od zginania
FP
σ
- dopuszczalne naprężenia na zginanie nie powodujące
odkształcenia zęba
g
F - nominalna siła obwodowa – zginająca, działająca na okręgu
podziałowym w przekroju czołowym
b
- szerokość wieńca koła
m
- moduł zęba
λ - względna długość zęba
z
- liczba zębów
4.1 Współczynniki eksploatacyjne
F
A
V
F
F
K
K
K
K
K
α
β
=
⋅
⋅
⋅
F
K - współczynnik eksploatacyjny – ujmuje on wpływ różnych
oddziaływań w warunkach eksploatacji na rzeczywiste naprężenia w
podstawie zębów.
A
K - współczynnik zastosowania. Uwzględnia nadwyżki dynamiczne
zewnętrzne (przeciążenia układu roboczego, charakterystyka silnika
napędowego, rozkład mas za i przed przekładnią oraz sprężystość
wałów i sprzęgieł) W obliczeniach wstępnych współczynnik
A
K
przyjmuję się: 1,1 1,4
A
K
=
÷
.
Przyjmuję 1,2
A
K
=
V
K - współczynnik dynamiczny zależny od wielu czynników, z których
prędkość obwodowa kół ma decydujące znaczenie. Ponadto istotny
wpływ ma dokładność wykonania przekładni i sztywność zazębienia.
W obliczeniach wstępnych można przyjąć empiryczny wzór Merita:
5
1
V
K
ϑ
=
≥
, jeśli w dalszych obliczeniach należy przyjąć
, ponieważ w temacie zadania nie ma zdefiniowanej wymaganej
prędkości wyciągania ciężaru Q toteż przyjmuję, że prędkość
obwodowa
1
V
K
<
1
V
K
=
ϑ jest mała i co za tym idzie
1
V
K
= .
F
K
β
- współczynnik rozkładu obciążenia gnącego na długości zęba
(szerokości wieńca zębatego) uwzględnia wzrost naprężeń gnących
wskutek nierównomiernego przylegania zębów pod obciążeniem.
Współczynnik
H
K
β
w zależności od układu kół zębatych w przekładni,
5
oraz dla kół „miękkich” w przybliżeniu jest równy:
1,025
H
K
β
=
Współczynnik
F
K
β
jest około 15-20% mniejszy od
H
K
β
i można go
oszacować z zależności:
F
N
F
H
K
K
β
β
=
Przy czym wykładnik
dla zębów prostych, oraz względnej długości
zębów równej:
F
N
10
b
m
λ
=
=
jest równy:
0,85
F
N
=
, zatem
0,85
1,025
F
K
β
=
1,021
F
K
β
=
F
K
α
- współczynnik rozkładu obciążenia wzdłuż odcinka przyporu na
poszczególne pary zębów znajdujących się w danej chwili w przyporze.
W określonych granicach stosowania współczynnik
F
K
α
jest równy
H
K
α
, wstępnie można je wyznaczyć w zależności od klasy dokładności
wykonania kół:
(
)
2
1
1 0,25
5
1
H
F
K
K
n
Z
α
α
ε
⎛
⎞
=
= +
−
−
⎜
⎝
⎠
⎟
, gdzie - klasa dokładności 5…9.
n
Z
ε
- współczynnik stopnia pokrycia
Dla kół wykonanych w klasie 6…8, o zębach prostych w przybliżeniu
przyjmuje się
1,00 1,18
H
F
K
K
α
α
=
=
÷
Przyjmuję 1,1
F
K
α
=
1,2 1 1,021 1,1
F
K
=
⋅ ⋅
⋅
1,35
F
K
=
4.2 Współczynniki konstrukcyjne
Ujmują one wpływ niektórych podstawowych parametrów
konstrukcyjnych.
FS
Y - współczynnik kształtu zęba
FS
Fa
Sa
Y
Y
Y
=
⋅
Fa
Y - współczynnik uwzględniający stereomechaniczny układ
przyłożenia siły zginającej do wierzchołka zęba.
Sa
Y - współczynnik uwzględniający działanie karbu oraz wpływ
naprężeń tnących i ściskających w podstawie zęba.
Dla zębów o kącie przyporu
i względnego promienia zaokrąglenia
narzędzia
20
D
0
0,2
a
n
m
ρ
=
przybliżony wzór na współczynnik kształtu
ma postać:
FS
Y
2
7,63 15,94
4,08 0,18
FS
v
v
x
Y
x
z
z
=
+
+
−
Po podstawieniu danych otrzymuję:
(
)
2
7,63 15,94 0,176
4,08 0,18 0,176
14
14
FS
Y
⋅
=
+
⋅
+
−
6
4,43
FS
Y
=
Y
ε
- współczynnik liczby przyporu, uwzględniający to, że w strefie
jednoparowego przyporu pełne obciążenie
nie działa na wierzchołku
zęba, lecz na mniejszym ramieniu, dlatego współczynnik ten zwykle
przyjmuje wartość mniejszą od jedności:
bn
F
0,8
0,2
Y
ε
α
ε
=
+
W obliczeniach wstępnych można przyjąć z korzyścią dla obliczeń
0,8 1
Y
ε
=
÷
Przyjmuję 0,8
Y
ε
=
Y
β
- współczynnik pochylenia linii zęba, uwzględniający korzystniejszy
rozkład naprężeń u podstawy zęba w rzeczywistości niż w zastępczym
modelu obliczeniowym.
min
1
120
Y
Y
β
β
β
β
ε
= −
≥
min
1 0,25
0,75
Y
β
β
ε
= −
≥
W obliczeniach wstępnych można przyjąć Y
1
β
=
4.3 Obliczenia modułu
3
1
6
2 95 1,35
4,43 0,8 1
10 14 440 10
m
⋅ ⋅
≥
⋅
⋅ ⋅
⋅
⋅
⋅
3
1
10
909,036
6,16 10
m
≥
⋅
1
1
0,00245
2,45
m
m
m
≥
⇒
≥
mm
m
Dobieram najbliższy znormalizowany moduł
1
2,5
m
m
=
1
2
m
m
=
5. Obliczenia odległości i współczynników korekcji
Teoretyczna odległość osi kół jest równa
1
2
0
1
2
z
z
a
m
+
=
⋅
0
14 84
2,5
122,5
2
a
mm
+
=
⋅
=
mm
m
Przyjmuję znormalizowaną rzeczywistą nominalną odległość osi kół:
125
r
a
m
=
Różnicę między nominalną i rzeczywistą odległością osi usuwam za
pomocą korekcji P
Obliczam wartość współczynnika
r
B
0
0
125 122,5
122,5
r
r
r
a
a
B
B
a
−
−
=
⇒
=
0,02041
r
B
=
1 7
0,02041 1 7 0,02041
p
r
r
B
B
B
=
+
=
+ ⋅
0,02182
p
B
=
Obliczam pozorną odległość osi
(
)
(
)
0
1
122,5 1 0,02182
p
p
a
a
B
= ⋅ +
=
⋅ +
125,17295
p
a
mm
=
7
Ponieważ istnieje konieczność zmniejszenie nadmiernego luzu
obwodowego, sprawdzam wartość zbliżenia osi K
p
r
K
a
a
=
−
125,173 125 0,173
K
=
−
=
Zbliżenie osi o wielkość K powoduje zmniejszenie luzu
wierzchołkowego, który wyniesie:
0,25
c
m
K
=
⋅ −
0,25 2,5 0,173 0,452
c
m
=
⋅
−
=
m
m
Wartość otrzymanego luzu wierzchołkowego będzie większa od
wartości minimalnej
(
)
, a
więc można nie ścinać głów zębów – wynika to również z zależności:
min
min
0,1
0,1 2,5
0,25
c
m
c
mm
m
=
⋅ ⇒
=
⋅
=
0,173
0,0692 1
2,5
K
k
m
=
=
=
< .
Obliczam sumę przesunięć zarysu w obu kołach
1
2
p
0
X
X
a
a
+
=
−
1
2
125,173 122,5 2,673
X
X
m
+
=
−
=
m
1
2
1
2
1
2
1,0692
X
X
x
x
x
x
m
+
+
=
⇒ +
=
2
1
1,0692
x
x
=
−
2
1,0692 0,18 0,89
x
=
−
=
W wyniku dokonania korekcji otrzymuje się zmienioną odległość osi a
co za tym idzie zmianie ulega również toczny kąt przyporu
0
cos
cos
w
r
a
a
α
α
=
122,5
cos
cos 20
0,920898768
125
w
α
=
=
D
'
22 56
w
α
=
D
6. Wymiary zębów i kół:
6.1 Wymiary zębnika
1
d
Wartość przesunięcia zarysu
1
1
1
X
x m
= ⋅
1
0,176 2,5
0,44
X
mm
mm
=
⋅
=
Średnica podziałowa
1
1
d
z m
1
= ⋅
1
14 2,5
35
d
mm
=
⋅
= mm
Średnica wierzchołków
(
)
1
1
1
2
2
a
d
m z
X
=
+
+
1
mm
(
)
1
2,5 14 2
2 0,44
40,88
a
d
mm
=
+
+ ⋅
=
Średnica podstaw
(
)
1
1
1
2,5
2
f
d
m
z
X
=
⋅
−
+
1
m
1
(
)
1
2,5 14 2,5
2 0,44 29,63
f
d
m
=
⋅
−
+ ⋅
=
Wysokość głowy zęba
1
1
a
h
m
X
=
+
1
2,5 0,44 2,94
a
h
m
=
+
=
m
Wysokość stopy zęba
8
9
1
X
1
1
1,25
f
h
m
=
⋅
+
1
1,25 2,5 0,44 3,57
f
h
=
⋅
+
=
Luz wierzchołkowy
1
1
3,57 2,94 0,63
f
a
c
h
h
c
=
−
⇒ =
−
=
6.2 Wymiary koła
2
d
Wartość przesunięcia zarysu
2
2
2
X
x m
= ⋅
2
0,89 2,5
2,26
X
mm
mm
=
⋅
=
Średnica podziałowa
2
2
d
z m
2
= ⋅
1
84 2,5
210
d
mm
=
⋅
=
mm
Średnica wierzchołków
(
)
2
2
2
2
2
a
d
m
z
X
=
+ +
2
mm
(
)
2
2,5 84 2
2 2,26
219,52
a
d
mm
=
+ + ⋅
=
Średnica podstaw
(
)
2
2
2
2,5
2
f
d
m
z
X
=
⋅
−
+
2
m
2
(
)
2
2,5 84 2,5
2 2,26 208,27
f
d
m
=
⋅
−
+ ⋅
=
Wysokość głowy zęba
2
2
a
h
m
X
=
+
2
2,5 2,26 4,76
a
h
m
=
+
=
m
2
X
Wysokość stopy zęba
2
2
1,25
f
h
m
=
⋅
+
2
1,25 2,5 2,26 5,385
f
h
=
⋅
+
=
Luz wierzchołkowy
2
2
2
2
5,39 4,76 0,63
f
a
c
h
h
c
=
−
⇒
=
−
=
Szerokość wieńca koła
2
2
2
10 2,5
25
b
m
b
mm
mm
λ
= ⋅
⇒
=
⋅
=
Szerokość wieńca zębnika
1
2
b
b
m
1
= +
1
25
2,5
27,5
b
mm
mm
m
=
+
=
m
1
7. Obliczenia konstrukcyjne kół 3 i 4
Materiał jak dla koła nr 2
2
1
M
M i
=
⋅
2
95
6 570
M
Nm
Nm
=
⋅ =
2
3
3
3
3
2
F
FS
FP
M
K
m
Y
z
Y Y
ε
β
λ
σ
⋅
⋅
≥
⋅
⋅
⋅ ⋅
⋅
3
3
6
2 570 1,35
4, 43 0,8 1
10 17 390 10
m
⋅
⋅
≥
⋅
⋅ ⋅
⋅
⋅
⋅
3
3
3
10
5454,22
4,35
6,63 10
m
m
≥
⇒
≥
⋅
Dobieram znormalizowany moduł:
3
4,6
m
=
3
4
m
m
=
7.1 Obliczenia odległości i współczynników korekcji
Teoretyczna odległość osi kół jest równa
3
4
0(3 4)
3
2
z
z
a
m
−
+
=
⋅
0(3 4)
17 97
4,6
262,2
2
a
mm
−
mm
+
=
⋅
=
Ponieważ w temacie zadania nie ma wymaganego przyjmowania
znormalizowanych odległości osi przyjmuję rzeczywistą odległość osi
kół:
262
r
a
mm
=
Różnicę między nominalną i rzeczywistą odległością osi usuwam za
pomocą korekcji P
Obliczam wartość współczynnika
r
B
(3 4)
0(3 4)
0(3 4)
262 262,2
262,2
r
r
r
a
a
B
B
a
−
−
−
−
−
=
⇒
=
0,00076
r
B
= −
1 7
0,00076 1 7 0,00076
p
r
r
B
B
B
=
+
= −
− ⋅
0,00076
p
B
= −
Obliczam pozorną odległość osi
(
)
(
)
(3 4)
0(3 4)
1
262,2 1 0,00076
p
p
a
a
B
−
−
=
⋅ +
=
⋅ −
(3 4)
262
p
a
m
−
m
=
Ponieważ odchyłki wymiarów są bardzo małe nie spowodują
znaczącego zmniejszenia luzu wierzchołkowego
p
r
K
a
a
=
−
0
K
=
Luzu wierzchołkowy wyniesie:
0,25
c
m
K
=
⋅ −
0,25 4,6 1,15
c
m
=
⋅
=
m
4)
Obliczam sumę przesunięć zarysu w obu kołach
3
4
(3 4)
0(3
p
X
X
a
a
−
−
+
=
−
3
4
3
4
3
4
3
262 262,2
0,04
4,6
X
X
x
x
x
x
m
+
−
+
=
⇒ +
=
= −
Przyjmuję:
3
0
x
=
4
0,04
x
= −
W wyniku dokonania korekcji otrzymuje się zmienioną odległość osi a
co za tym idzie zmianie ulega również toczny kąt przyporu
0
cos
cos
w
r
a
a
α
α
=
262,2
cos
cos 20
0,947643866
260
w
α
=
=
D
'
18 37
w
α
=
D
7.2 Wymiary zębów i kół:
10
11
3
7.2.1 Wymiary koła
3
d
Średnica podziałowa
3
3
d
z m
= ⋅
3
17 4,6
78,2
d
mm
=
⋅
=
mm
Średnica wierzchołków
(
)
2
3
3
2
a
d
m z
=
+
(
)
1
4,6 17 2
87, 4
a
d
m
=
+
=
m
Średnica podstaw
(
)
3
3
3
2,5
f
d
m
z
=
⋅
−
(
)
3
4,6 17 2,5
66,7
f
d
m
=
⋅
−
=
m
Wysokość głowy zęba
3
3
a
h
m
=
3
4,6
a
h
mm
=
Wysokość stopy zęba
3
3
1,25
f
h
m
=
⋅
3
1,25 4,6 5,75
f
h
=
⋅
=
Luz wierzchołkowy
3
3
5,75 4,6 1,15
f
a
c
h
h
c
=
−
⇒ =
−
=
Szerokość wieńca koła
3
3
3
10 4,6
46
b
m
b
mm
mm
λ
= ⋅
⇒ =
⋅
=
7.2.2 Wymiary koła
4
d
Wartość przesunięcia zarysu
4
4
4
X
x m
= ⋅
4
0,04 4,6
0,184
X
mm
mm
= −
⋅
= −
Średnica podziałowa
4
4
d
z m
4
= ⋅
4
97 4,6
446,2
d
mm
=
⋅
=
mm
Średnica wierzchołków
(
)
4
4
4
2
2
a
d
m
z
X
=
+
+
4
m
mm
(
)
4
4,6 97 2
2 0,184
455
a
d
m
=
+
− ⋅
=
Średnica podstaw
(
)
4
4
4
2,5
2
f
d
m
z
X
=
⋅
−
+
4
m
4
(
)
4
4,6 97 2,5
2 0,184 434,332
f
d
m
=
⋅
−
− ⋅
=
Wysokość głowy zęba
4
4
a
h
m
X
=
+
4
4,6 0,184 4,416
a
h
m
=
−
=
m
4
X
Wysokość stopy zęba
4
4
1,25
f
h
m
=
⋅
+
4
1,25 4,6 0,184 5,566
f
h
=
⋅
−
=
Luz wierzchołkowy
4
4
4
4
5,566 4,416 1,15
f
a
c
h
h
c
=
−
⇒
=
−
=
Szerokość wieńca koła
3
3
3
10 4,6
46
b
m
b
mm
mm
λ
= ⋅
⇒ =
⋅
=

12
Literatura
:
1. Osiński Z., Bajon W., Szucki T.: Podstawy Konstrukcji Maszyn, PWN, Warszawa 1986
2. Orlik Z., Surowiak W., Rutkowski A.: Części maszyn cz. I i II, WSiP, Warszawa 1985
3. Przykłady obliczeń z Podstaw Konstrukcji Maszyn, pod redakcją Eugeniusza Mazanka, WNT,
Warszawa 2005
Document Outline
Wyszukiwarka
Podobne podstrony:
projekt - Przekładnia ver2 - Oceloot, PKM projekty, PROJEKTY - Oceloot, Projekt VIII - Przekładnia
projekt Sprzeglo ver2 Oceloot id 397907
projekt - Sprzęgło ver2 - Oceloot, PKM projekty, PROJEKTY - Oceloot, Projekt VII - Sprzęgło, Projekt
projekt Sprzęgło ver2 Oceloot
projekt - Przekładnia - Oceloot, PKM projekty, PROJEKTY - Oceloot, Projekt VIII - Przekładnia
Projekt PrzekladniaZebata PrzekladniaZebata(wgLawrowskiego)
projekt przekładnie zębate3
Projektowanie przekładni pasowej
[Krzychu M]Projekt przekładni ślimakowej
S-kliny, PKM - Projekt Przekładnia zębata
[Krzychu M]Projekt przekładni ślimakowej
Projektowanie przekladnie id 40 Nieznany
Projekt PrzekladniaZebata, PrzekladniaZebata Projekt Arkusz2
Projekt-PrzekladniaZebata (2Sg 280S12 Trójfazowe si...)
Projekt-PrzekladniaZebata PrzekladniaZebata
Projekt-PrzekladniaZebata (2Sg 250M12 Trójfazowe si...)
Projekt PrzekladniaZebata, PrzekladniaZebata Projekt Arkusz
PROJEKTY Z PKM, AGH, Semestr 5, PKM całość, PKM akademiki I, PKM-projekty, Projekt przekładni zębate
Projektowanie przekładni walcowych
więcej podobnych podstron