Projektowanie Systemów
Elektromechanicznych
Wykład 3
Przekładnie
Przekładnie
• Zębate:
– Proste;
– Złożone;
– Ślimakowe;
– Planetarne.
• Cięgnowe:
– Pasowe;
– Łańcuchowe;
– Linowe.
Przekładnie
• Hydrauliczne:
– Hydrostatyczne;
– Hydrokinetyczne – podstawą działania jest
wykorzystanie energii kinetycznej płynu.
Stosowane w w automatycznych skrzyniach
biegów. Charakteryzują się stosunkowo niską
sprawnością i możliwością przeciążenia bez
niebezpieczeństwa przeciążenia układu
napędowego.
Przekładnie zębate
Zalety:
• Łatwość wykonania;
• Stosunkowo małe gabaryty;
• Stosunkowo cicha praca – przy
odpowiednim smarowaniu;
• Duża równomierność pracy;
• Wysoka sprawność (do 98%)
Przekładnie zębate
Wady:
• Stosunkowo niskie przełożenie dla
pojedynczego stopnia;
• Sztywna geometria;
• Brak naturalnego zabezpieczenia przed
przeciążeniem.
Przekładnie zębate - podział
Ze względu na umiejscowienie zazębienia
• Zazębienie zewnętrzne;
• Zazębienie wewnętrzne.
Rodzaj ruchu:
• Przekładnia obrotowa;
• Przekładnia liniowa.
Przekładnie zębate - podział
• Wzajemne usytuowanie osi obrotu
• Przekładnia czołowa:
– Walcowa;
– Stożkowa.
• Przekładnia śrubowa:
– Ślimakowa;
– Hiperboloidalna.
Przekładnia prosta
Przełożenie przekładni
2
1
i
2
1
n
n
i
1
2
d
d
i
Wprowadzając pojęcie średnicy podziałowej, modułu oraz
podziałki zęba
m
z
p
z
d
1
2
z
z
i
Przekładnia ślimakowa
)
(
tg
tg
tg
tg
)
(
γ – kąt wzniosu gwintu
ς – „kąt tarcia”, taki że
współczynnik µ=tgς
Elementem napędzającym jest
ślimak
Elementem napędzającym jest
ślimacznica
Samohamowność, gdy: γ < ς, η < 0
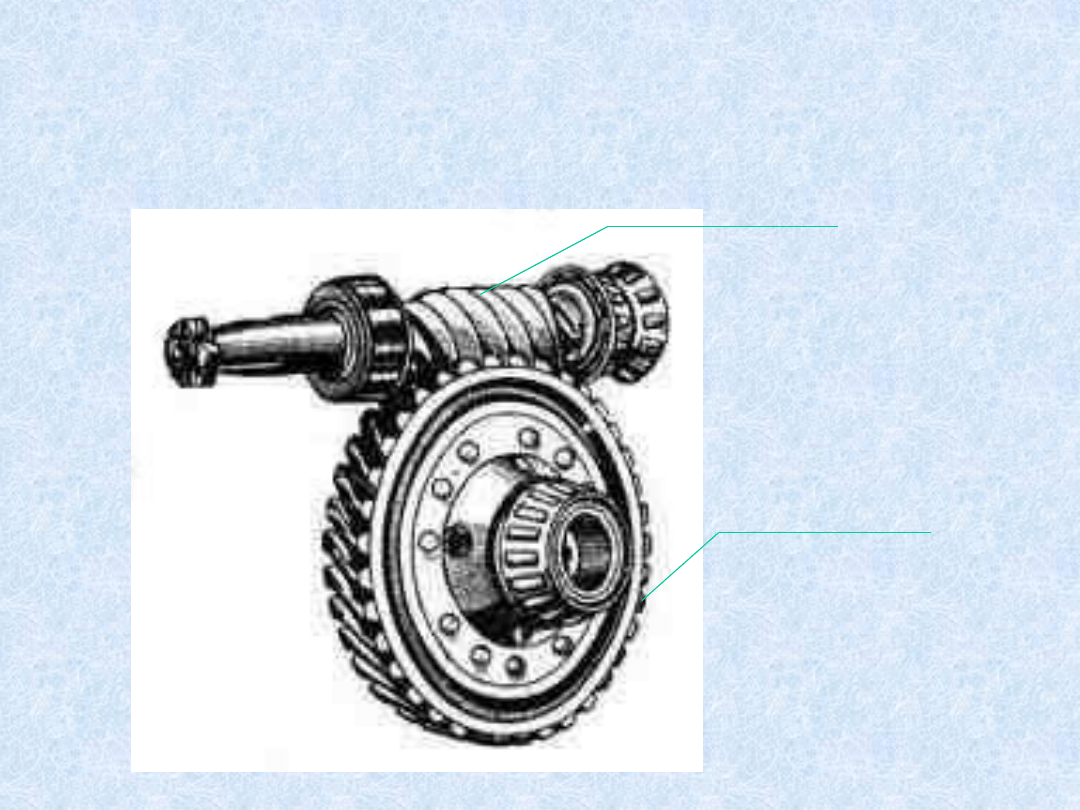
Przekładnia ślimakowa
ślimak
ślimacznica
Przekładnia planetarna
(obiegowa)
• Koło zębate wewnętrzne (centralne) z
uzębieniem zewnętrznym;
• Satelity połączone jarzmem (2, 3 lub 4);
• Koło zębate zewnętrzne z uzębieniem
wewnętrznym.
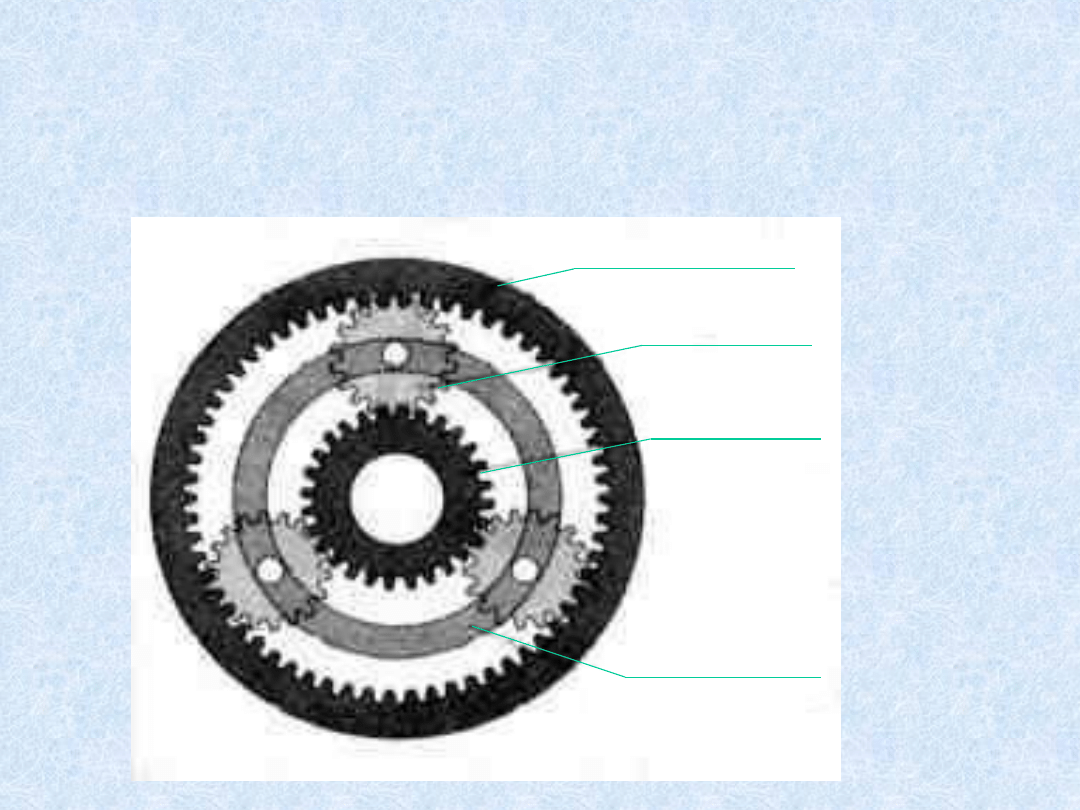
Przekładnia planetarna
(obiegowa)
Koło zębate zewnętrzne
satelita
Koło zębate wewnętrzne
(słoneczne)
Ruchome jarzmo

Przekładnia planetarna -
przełożenie
• Metoda chwilowego środka obrotu
j
j
i
1
13
Względem punktu C
2
2
r
v
B
2
2
2r
v
A
B
A
v
v
2
Metoda chwilowego środka
obrotu
Prędkość liniową v dowolnego punktu A
ciała poruszającego się ruchem płaskim
obrotowym z prędkością kątową względem
nieruchomego w danej chwili punktu B
można obliczyć jako iloczyn prędkości
kątowej i odległości r między punktami A
i B, czyli v=
*r
Przekładnia planetarna -
przełożenie
Względem punktu O
)
(
2
1
r
r
r
v
j
j
j
B
1
1
r
v
A
wiedząc, że:
B
A
v
v
2
)
(
2
2
1
1
1
r
r
r
j
Przekładnia planetarna -
przełożenie
1
2
1
1
2
2
r
r
r
j
2
1
3
2 r
r
r
1
3
1
1
3
1
1
13
z
z
z
r
r
r
i
j
j
ostatecznie:
Przekładnia pasowa
Zalety:
• Łagodzenie gwałtownych zmian obciążenia;
• Tłumienie drgań;
• Zabezpieczenie zespołów napędowych
przed nadmiernym przeciążeniem;
• Prostota, niskie koszty wytwarzania;
• Mała wrażliwość na dokładność
wzajemnego ustawienia osi
Przekładnia pasowa
• Wady:
• Mała zwartość;
• Duże siły obciążające wały i łożyska –
naciąg pasów;
• Niestałość przełożenia – poślizg pasów.
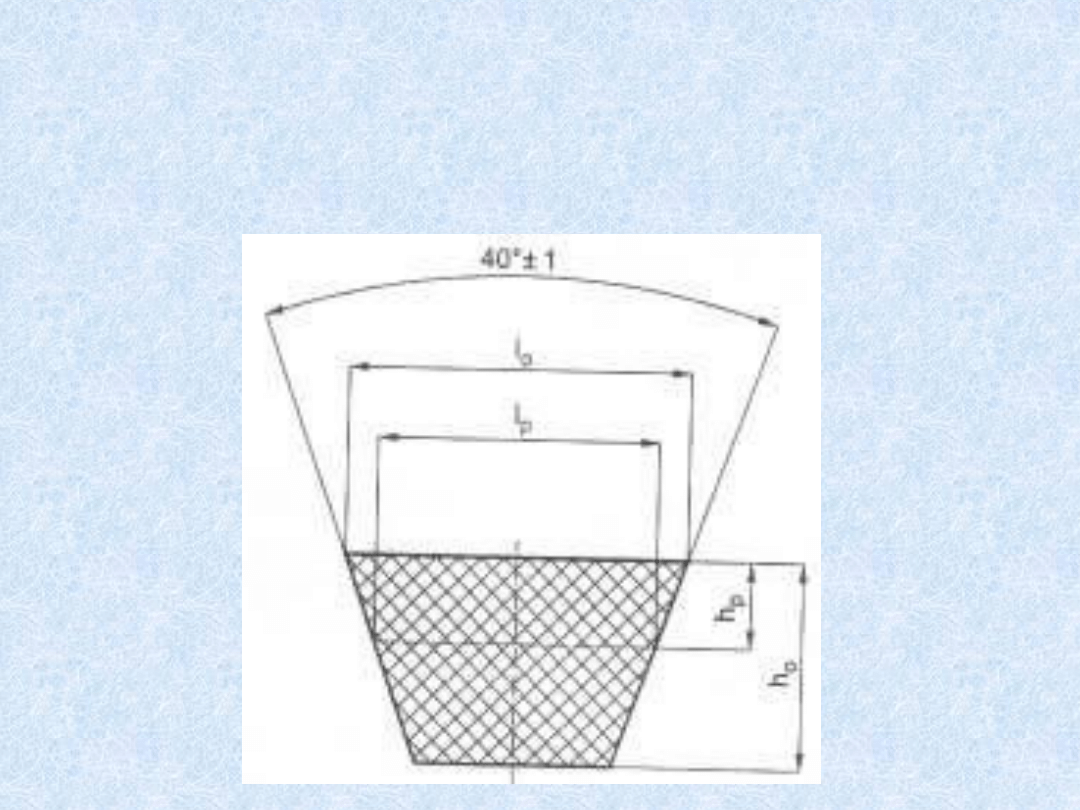
Przekładnia pasowa
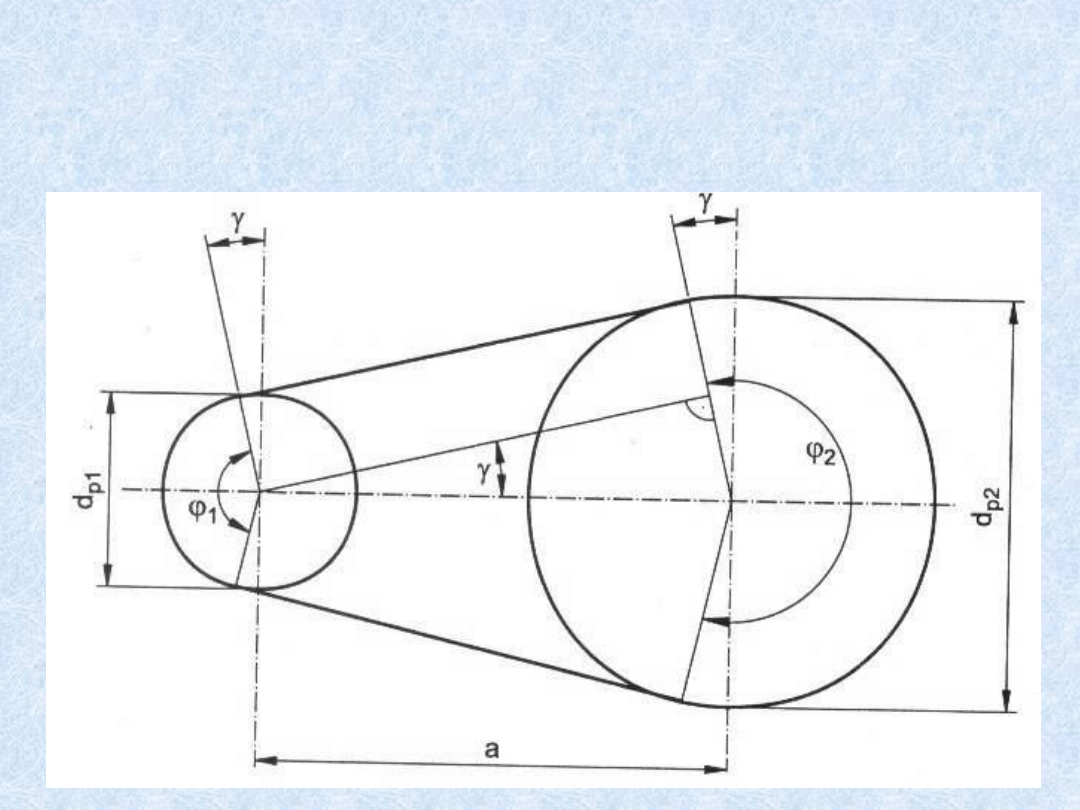
Przekładnia pasowa - schemat
Przekładnia pasowa - obliczenia
1. Wstępny dobór przekroju pasa, średnicy
mniejszego koła (najmniejsze w danym
typoszeregu, ze względu na zwartość
przekładni)
2. Obliczenie prędkości obwodowej na
średnicy skutecznej
2
p
d
v
Przekładnia pasowa - obliczenia
• Obliczenie przełożenia i średnicy
skutecznej drugiego koła:
2
1
2
1
1
2
n
n
d
d
i
p
p
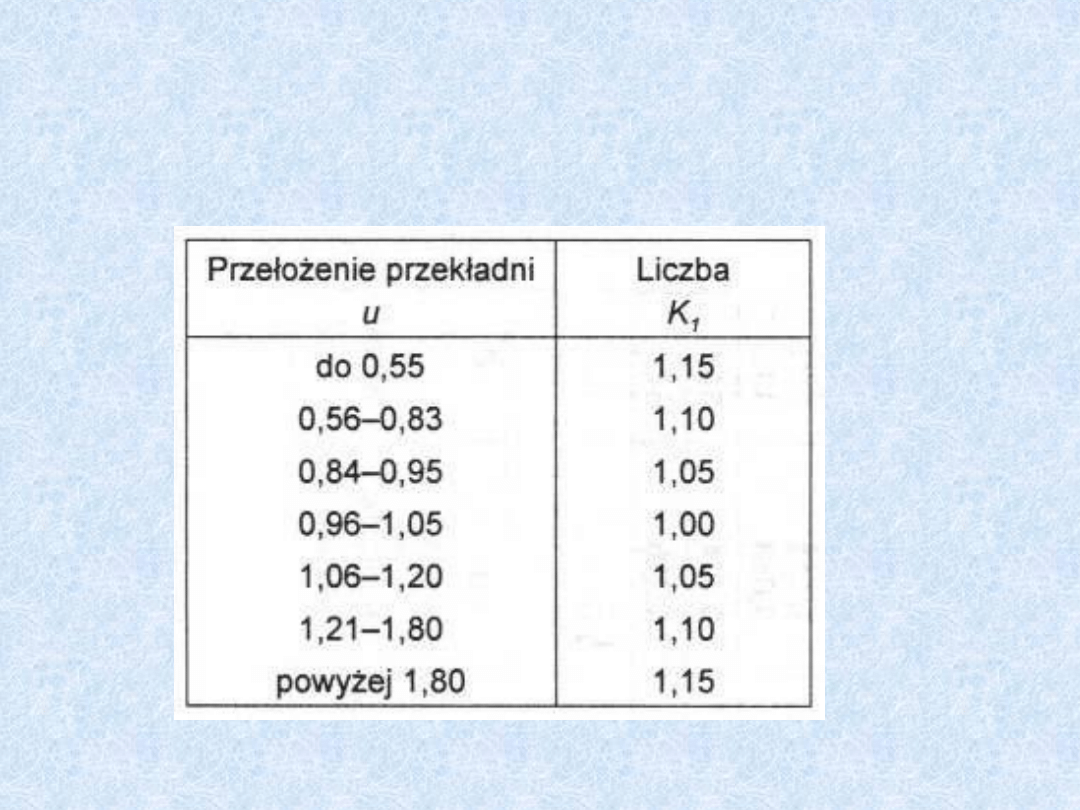
• Obliczenie średnicy równoważnej koła
mniejszego:
1
1
K
d
D
p
e
Przekładnia pasowa - obliczenia
Przekładnia pasowa - obliczenia
• Odległość międzyosiowa a:
)
(
50
2
2
1
2
1
p
p
p
p
d
d
a
d
d
• Długość pasów:
cos
2
)
(
180
2
2
1
2
1
a
d
d
d
d
L
p
p
p
p
p
Przekładnia pasowa - obliczenia
a
d
d
p
p
2
sin
1
2
2
180
1
• Dobrać znormalizowaną długość pasa L
p
• Wynikowa odległość międzyosiowa:
cos
2
)
(
180
2
2
1
2
1
p
p
p
p
p
d
d
d
d
L
a
Przekładnia pasowa - obliczenia
• Sprawdzenie przenoszenia mocy
T
L
k
k
k
N
z
N
1
N
1
– moc przenoszona przez jeden pas dobierana na podstawie średnicy
równoważnej i prędkości obwodowej;
k
L
– liczba uwzględniająca zmienność obciążeń pasa zależna od jego
długości;
k
φ
– liczba zależna od kąta opasania;
k
T
– liczba uwzględniająca warunki i liczbę godzin pracy pasa klinowego.
Przekładnia pasowa - obliczenia
• Liczba pasów:
k
k
k
N
z
L
T
Wariatory – pasy płaskie, stożkowe koła; pasy
klinowe, koła o zmiennej średnicy skutecznej;
płynna i skokowa zmiana przełożenia.
Wielokrążki
• Wielokrążek prosty;
• Wielokrążek potęgowy;
• Wielokrążek różnicowy
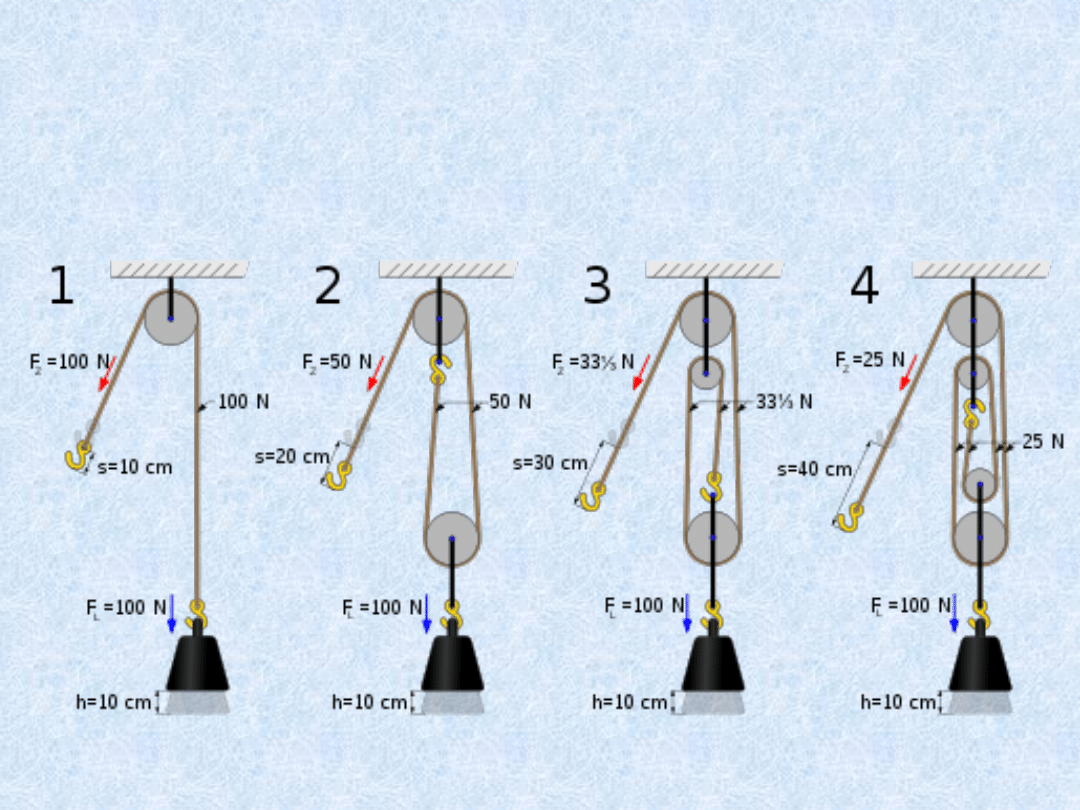
Wielokrążek prosty
Wielokrążek zwykły
• Siła niezbędna do uniesienia ciężaru Q:
wkz
k
Q
P
)
1
(
1
k
k
wkz
Wielokrążek zwykły
Siła niezbędna do uniesienia ciężaru Q dla:
• Końca cięgna umocowanego do zblocza
nieruchomego:
• Końca cięgna umocowanego do zblocza
ruchomego:
n
Q
P
2
)
1
(
2
n
Q
P
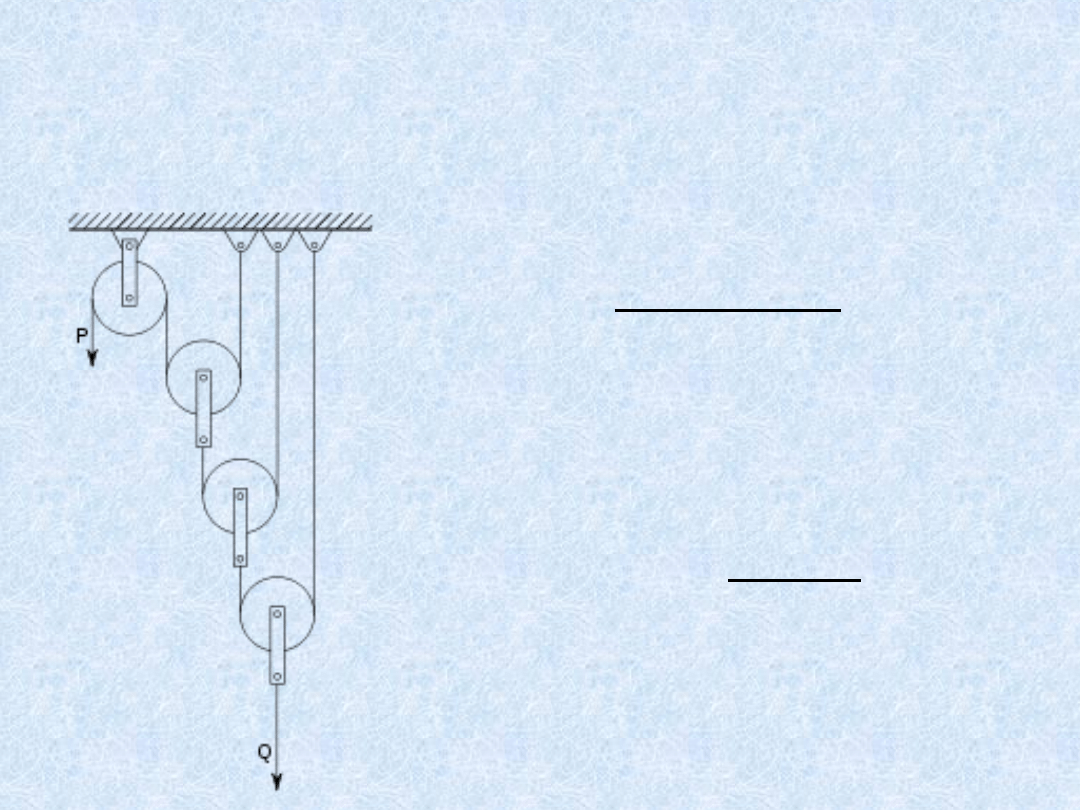
Wielokrążek potęgowy
wkp
n
Q
P
2
n
wkp
)
2
1
(
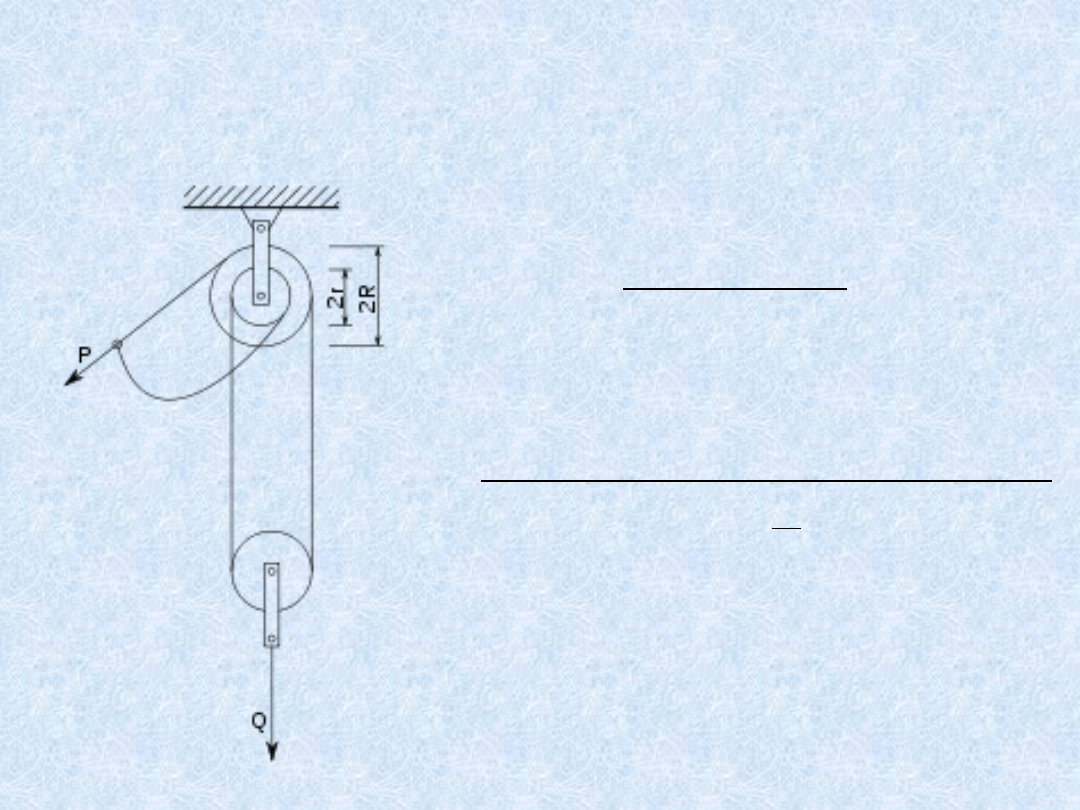
Wielokrążek różnicowy
Q
R
r
R
P
wkr
2
))
1
(
2
,
0
99
,
0
01
,
1
(
2
)
)(
1
(
{kind=link}
R
r
R
r
R
wkr
Wyszukiwarka
Podobne podstrony:
przekroj (PROJEKT2) Model id 40 Nieznany
PrzekladniaPasowa projekt id 40 Nieznany
projekty gry planszowe FD id 40 Nieznany
Projektowanie filtrow FIR id 40 Nieznany
ProjektRys KKa Wrzesinski id 40 Nieznany
Przekladnia zebata gotowa id 40 Nieznany
Projektant grafiki 216604 id 40 Nieznany
projekty gry planszowe FD id 40 Nieznany
projekty szkolen(1) id 401146 Nieznany
Projekt nr2 id 399211 Nieznany
Projekt2 poprawiony id 400268 Nieznany
Projekt z ekologii id 399851 Nieznany
3 Projektowanie betonu id 34011 Nieznany (2)
5 6 3 Lab Registry Backup id 40 Nieznany (2)
Projekt z budownictwa id 399843 Nieznany
Promethidion Opracowanie id 40 Nieznany
Projektowanie raportow id 40062 Nieznany
Projektowanie betonu id 400490 Nieznany
więcej podobnych podstron