
2. WSTĘP DO TEORII SPRĘŻYSTOŚCI
1
2.
2. WSTĘP DO TEORII SPRĘŻYSTOŚCI
2.1. Tensory macierzy
Niech macierz [D] będzie macierzą cosinusów kierunkowych
[
D
]
=
[
i ' j
]
(2.1)
Macierz transformowana jest równa macierzy odwrotnej (transformacja ortonormalna)
[
D
]
−1
=
[
D
]
T
(2.2)
Jeśli przyjmiemy, że wektor w pierwszej bazie ma współrzędne A
i
a w drugiej bazie współrzędne A
i'
to możemy macierzowo zapisać
[
A
i '
]
=
[
D
]
[
A
i
]
(2.3)
Postać macierzową można utworzyć także dla tensora
T
ij
=[T ]
3
×3
(2.4)
jak i wektora
A
i
=[ A]
3
×1
={A}=col [ A]=col {A}
(2.5)
Zauważmy, że transponując wektor w rezultacie otrzymamy macierz o wymiarach 1x3
{A}
T
=[ A]
1
×3
(2.6)
Mnożenie skalarne przedstawia się za pomocą zapisu
a) skalarnego (absolutnego)
A⋅B=c
(2.7)
b) wskaźnikowego
c
=A
i
⋅B
i
(2.8)
Aściukiewicz P., Baron P., Gawron U., Krzysztoń A., Ratajczak D., Wojciechowski M.
AlmaMater

2. WSTĘP DO TEORII SPRĘŻYSTOŚCI
2
c) macierzowego
A→[ A]=
[
A
1
A
2
A
3
]
=[ A
1
A
2
A
3
]
T
B →[B]=
[
B
1
B
2
B
3
]
[
B
1
B
2
B
3
]
3
×1
A⋅B=[ A]
T
[ B]=[ A
1
A
2
A
3
]
1
×3
[C ]
(2.9)
Łatwo zatem zauważyć, że w wyniku mnożenia dwóch macierzy o wymiarach 3x3 otrzymujemy
macierz także o wymiarach 3x3. Pamiętajmy o tym, że mnożenie dwóch macierzy jest możliwe tylko wtedy,
gdy liczba kolumn pierwszej z nich jest równa liczbie wierszy drugiej.
[ A]
3
×3
[ B]
3
×3
=[C ]
3
×3
(2.10)
Wskaźnikowo mnożenie dwóch macierzy 3x3 zapisujemy w następujący sposób:
A
ij
⋅B
jk
=C
ik
(2.11)
2.2. Działanie tensora na wektor
Tensor działa na wektor jako operator
T a=b
T
ij
a
j
=b
i
[T ]
3
×3
[a]
3
×1
=[b]
3
×1
(2.12)
co przedstawiają powyższe równania w zapisie odpowiednio absolutnym, wskaźnikowym i
wektorowym. Działanie tensora można przykładowo zaprezentować w następujący sposób:
a⋅T =c
[a]
3
×1
[T ]
3
×3
niewykonalne
a
i
⋅T
ij
=c
j
[a]
1
×3
T
[T ]
3
×3
=[b]
1
×3
T
A
i '
=
i ' j
A
j
[ A
'
]=[ D][ A]
A
j
=
ji '
A
i '
[ A]=[ D]
T
[ A
'
]
(2.13)
2.3. Transformacja tensora (o 9 składowych)
Korzystając z prawa transformacji tensora wyznaczymy teraz współrzędne tensora w układzie
Aściukiewicz P., Baron P., Gawron U., Krzysztoń A., Ratajczak D., Wojciechowski M.
AlmaMater

2. WSTĘP DO TEORII SPRĘŻYSTOŚCI
3
obróconym. Postać macierzową wektora
b
w układzie pierwotnym możemy przedstawić jako
[b]=[T ][a]
(2.14)
natomiast w układzie obróconym
[b
'
]=[T
'
][a
'
]
(2.15)
Szukany tensor w układzie obróconym wyznaczamy w następujący sposób:
[b
'
]=[ D][b]
[b]=[ D]
T
[b
'
]
[a]=[ D]
T
[a
'
]
(2.16)
podstawiamy do wzoru
[b]=[T ][a]
i otrzymujemy
[ D]
T
[b
'
]=[T ][ D]
T
[a
'
]
[b
'
]=[T ][ D][ D]
T
[a
'
]
[b
'
]=[T
'
][a
'
]
[T
'
]=[ D][T ][ D]
T
(2.17)
2.4. Analiza pól
Funkcja wektorowa – funkcja, która każdemu punktowi przestrzeni przyporządkowuje wektor.
Funkcja tensorowa – funkcja, która każdemu punktowi przestrzeni przyporządkowuje tensor.
Funkcja skalarna – funkcja, która każdemu punktowi pewnego obszaru przyporządkowuje okreslony
skalar (zwana także polem skalarnym).
Aściukiewicz P., Baron P., Gawron U., Krzysztoń A., Ratajczak D., Wojciechowski M.
AlmaMater
2. WSTĘP DO TEORII SPRĘŻYSTOŚCI
4
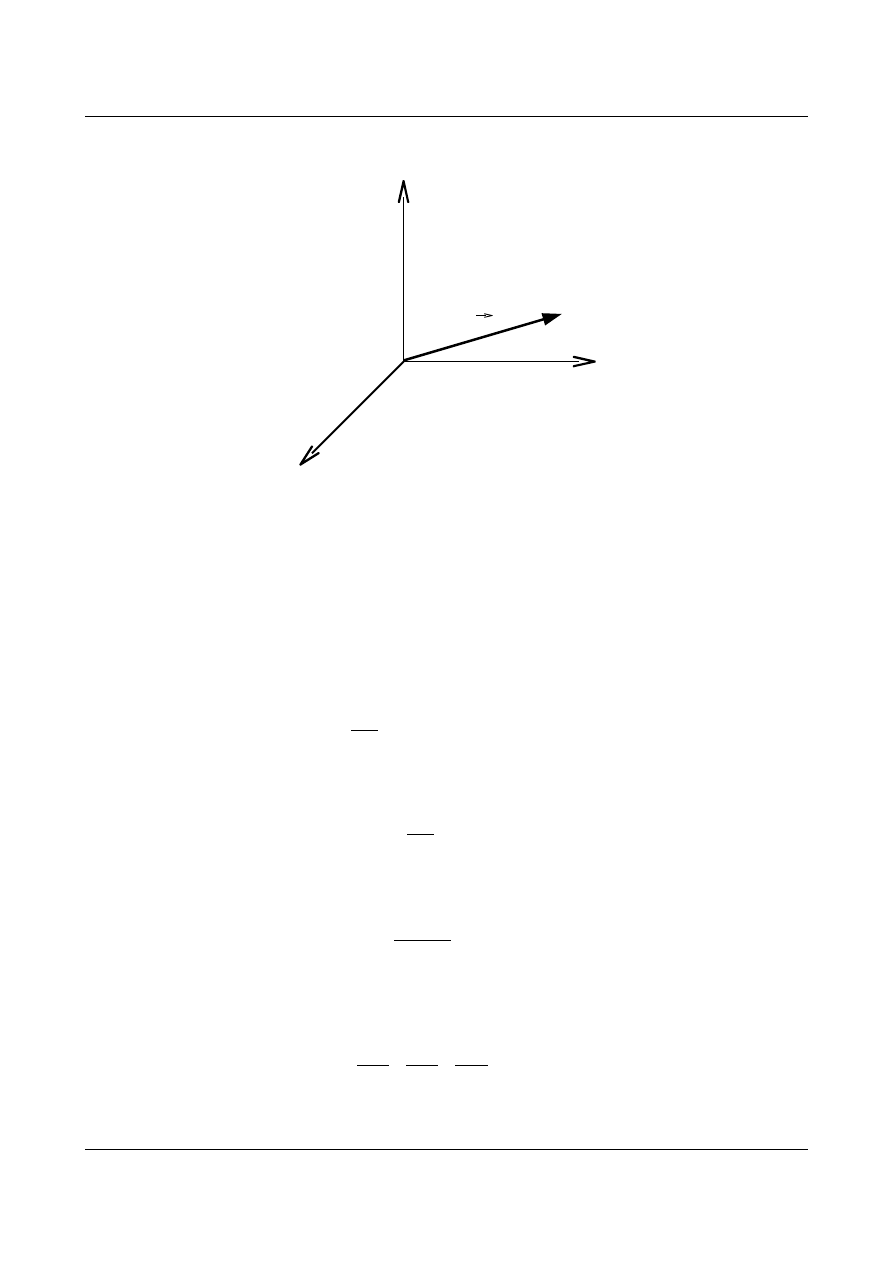
1) Gradient - funkcja wektorowa.
Rys. 2.1. Wektor
X
w układzie kartezjańskim.
X
- zapis absolutny
X
i
- zapis wskaźnikowy
[
X
]
3
×1
- zapis macierzowy
Funkcja
x
1
, x
2
, x
3
jest funkcją skalarną. Jeżeli przyjmiemy, że pochodne tej funkcji są
współrzędnymi pewnego wektora to wektor ten nazywamy gradientem pola skalarnego. Różniczkujemy
funkcję po odpowiednich współrzędnych:
G
i
=
∂
∂ x
i
=G x
1
, x
2
, x
3
(2.18)
Pierwsza pochodna funkcji:
,i
=
∂
∂ x
i
(2.19)
Druga pochodna:
,ij
=
∂
2
∂ x
i
∂ x
j
(2.20)
Różniczkowanie połączone z sumowaniem:
, ii
=
∂
2
∂ x
1
2
∂
2
∂ x
2
2
∂
2
∂ x
3
2
(2.21)
Aściukiewicz P., Baron P., Gawron U., Krzysztoń A., Ratajczak D., Wojciechowski M.
AlmaMater
X
1
2
3
2. WSTĘP DO TEORII SPRĘŻYSTOŚCI
5
Wyznaczamy gradient funkcji:
G
=G
1
e
1
G
2
e
2
G
3
e
3
=G
i
e
i
=
∂
∂ x
i
e
i
=
,i
e
i
=grad =
∇
(2.22)
A więc ostatecznie gradient funkcji
G
=
∇
(2.23)
gdzie operator Nabla
∇≡ ∂
∂ x
i
e
i
(2.24)
Gradient określa kierunek i wartość przyrostu funkcji.
Zad.1. Znając prawo transformacji wektorów udowodnić, że wielkość zwana gradientem jest
wektorem.
G
i '
=
,i '
=
∂
∂ x
i '
=
∂
∂ x
j
∂ x
j
∂ x
i '
=
∂
∂ x
j
ji '
=
∂
∂ x
j
i ' j
=
i ' j
G
j
2) Diwergencja – każdemu punktowi odpowiada wektor:
A=A
i
e
i
gdzie
A
i
=A
i
x
1
x
2
x
3
=A
i
x
ii
T
ij
=
∂ A
i
∂ x
j
=A
i , j
(2.25)
Polem diwergencji różniczkowalnego pola wektorowego nazywamy pole skalarne okreslone
zależnością
A
i , j
= A
i ,i
=
∂ A
1
∂ x
1
∂ A
2
∂ x
2
∂ A
3
∂ x
3
=div A
(2.26)
Ta wielkość ma cechy tensora.
Zad.2. Udowodnić, że omawiana wielkość jest tensorem przez wykazanie, że
T
ij
transformuje się
według prawa transformacji tensora.
Aściukiewicz P., Baron P., Gawron U., Krzysztoń A., Ratajczak D., Wojciechowski M.
AlmaMater
2. WSTĘP DO TEORII SPRĘŻYSTOŚCI
6
A=
[
A
1
A
2
A
3
]
T
ij
=
[
A
1,1
A
1,2
A
1,3
A
2,1
A
2,2
A
2,3
A
3,1
A
3,2
A
3,3
]
T
ij
=A
i , j
A
i ' , j '
=
∂ A
i '
∂ x
j '
=
∂ A
i '
∂ x
k
⋅
∂ x
k
∂ x
j '
=A
i ' , k
kj '
=☼
A
i , ' k
=
∂ A
i '
∂ x
k
= ∂
∂ x
k
A
i ,'
= ∂
∂ x
k
A
i
i ' i
=A
i , k
i ' i
☼
=A
i ' k
j ' k
i ' k
Zad.3. Czy jest możliwe zapisanie diwergencji macierzowo?
div
A
=
∇⋅A=
∂ A
1
∂ x
1
∂ A
2
∂ x
2
∂ A
3
∂ x
3
∇⋅A=
[
∂
∂ x
1
∂
∂ x
2
∂
∂ x
3
]
T
⋅
[
A
1
A
2
A
3
]
Zad.4. Obliczyć div z gradΦ.
div
grad =div[
, i
e
i
]=
, ii
=
∂
2
∂ x
1
2
∂
2
∂ x
2
2
∂
2
∂ x
3
2
=∇
2
∇
2
Laplasjan funkcji skalarnej
3) Rotacja – polem rotacji różniczkowalnego pola wektorowego
A
nazywamy pole wektorowe określone
zależnością
∇×A=rot A=R
∂
∂ x
j
e
j
×A
k
e
k
=e
ijk
∂ A
u
∂ x
j
e
i
=e
ijk
A
k , j
e
i
e
j
×
e
k
=
e
ijk
e
i
R
=e
ijk
A
k , j
(2.27)
Aściukiewicz P., Baron P., Gawron U., Krzysztoń A., Ratajczak D., Wojciechowski M.
AlmaMater
2. WSTĘP DO TEORII SPRĘŻYSTOŚCI
7
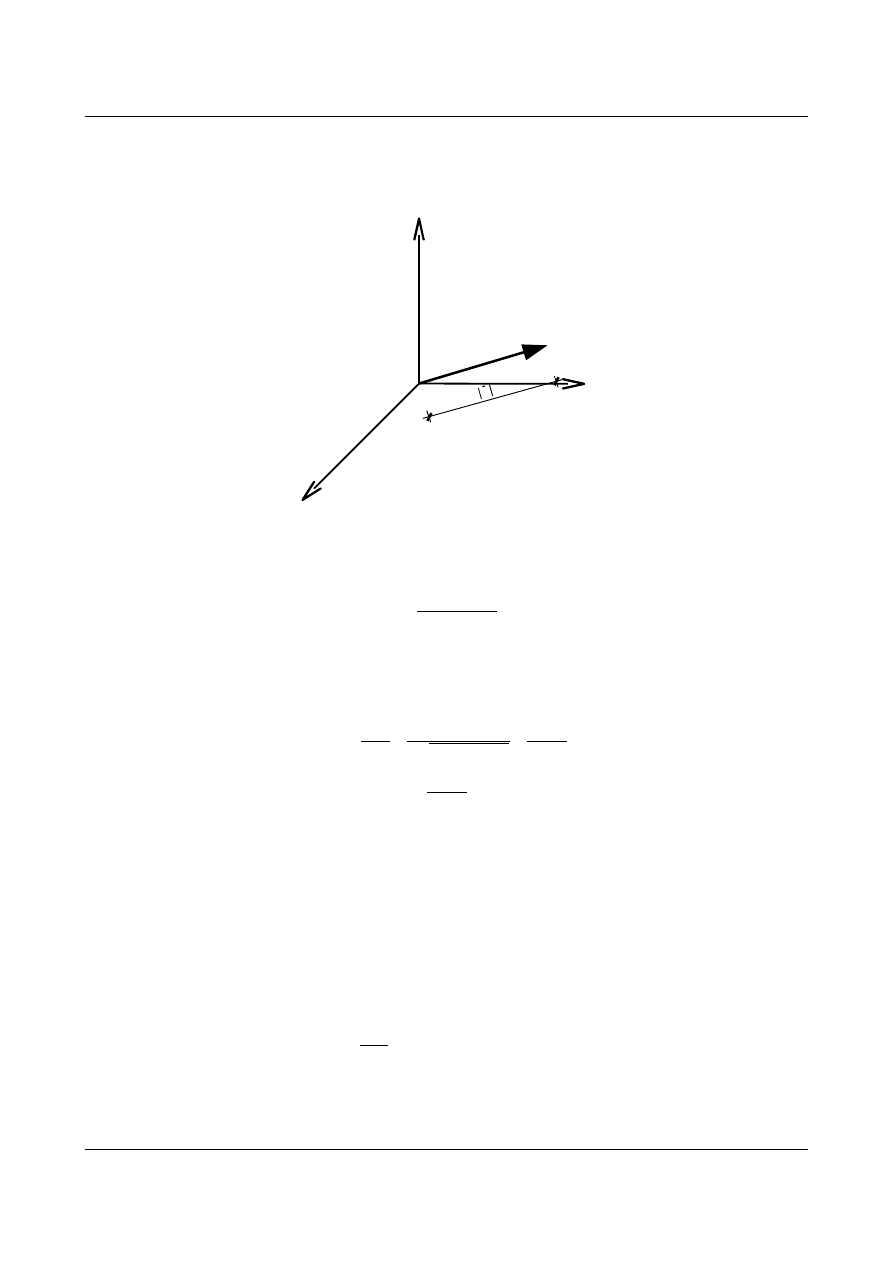
Przykład:
Dany jest punkt P.
Funkcją opisującą położenie tego punktu jest funkcja
x
1
x
2
x
3
opisana wzorem
=
x
1
2
x
2
2
x
3
2
a) wyznaczyć gradient tej funkcji
G
i
=
,i
G
1
=
∂
∂ x
1
=
1
⋅2 x
1
2
x
1
2
x
2
2
x
3
2
=
x
1
│
r │
G
=
r
│
r │
= e
r
b) Obliczyć div
r
gdy dane są współrzędne wektora miejsca
r
:
r
1
=x
1
r
2
=x
2
r
3
=x
3
r=x
i
e
i
∂
∂ x
i
e
i
⋅x
i
e
i
=111=3
Aściukiewicz P., Baron P., Gawron U., Krzysztoń A., Ratajczak D., Wojciechowski M.
AlmaMater
3
2
1
r
P

2. WSTĘP DO TEORII SPRĘŻYSTOŚCI
8
c) Obliczyć rotację wektora
r
∂
∂ x
i
e
i
×x
i
e
i
=
∂ x
i
∂ x
i
e
i
×e
i
=0
Aściukiewicz P., Baron P., Gawron U., Krzysztoń A., Ratajczak D., Wojciechowski M.
AlmaMater
Wyszukiwarka
Podobne podstrony:
R 47, A T e o r i a S p r ę ż y s t o ś c i, T E M A T Y B L O K O W E, I Wstęp do teorii sprężys
Wstęp do teorii tłumaczeń 22.02.2010, moczulski
WSTĘP DO TEORII BEZPIECZEŃSTWA na 8 02 2014
Wstęp do teorii tłumaczeń 31.05.2010, moczulski
Wstęp do teorii kultury, wykład
Opracowanie 1, nauka - szkola, hasło integracja, rok I, WSTĘP DO TEORII POLITYKI
WSTĘP DO TEORII PAŃSTWA I PRAWA
Wstep do teorii polityki - Chazbijewicz(2)(1), europeistyka
Wstęp do teorii komunikacji cz.1, Wstęp do teorii komunikacji
28.10.11, Wstęp do teorii komunikacji
28.10.11, Wstęp do teorii komunikacji
4.11.11, Wstęp do teorii komunikacji
Wstęp do teorii polityki wykłady
Wstęp do teorii tłumaczeń 22.03.2010, moczulski
Wstęp do teorii tłumaczeń 12.04.2010, moczulski
02 Wstęp do C
więcej podobnych podstron