Dodatek 1- Uzupełnienie wiadomości o obwodach
magnetycznych
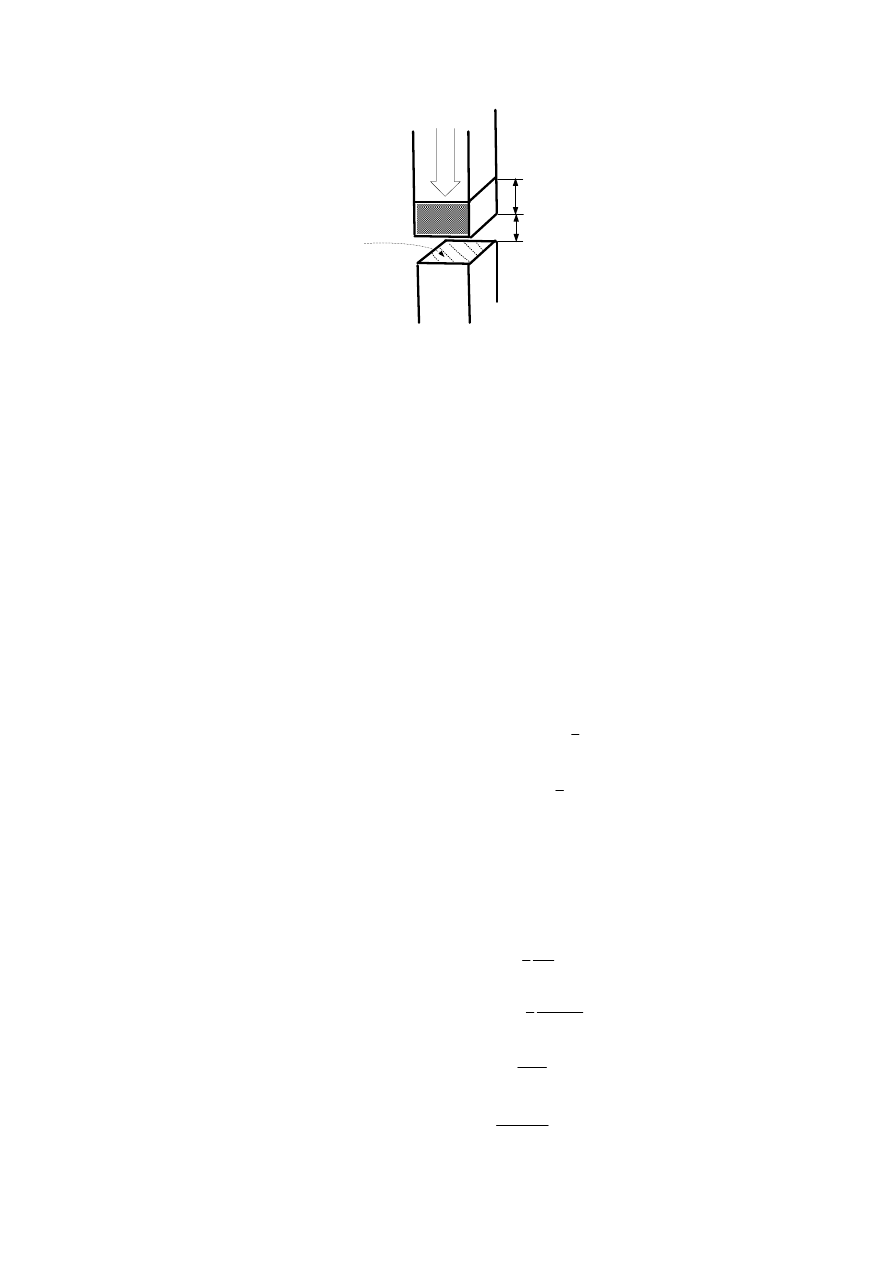
D.1. Wprowadzenie
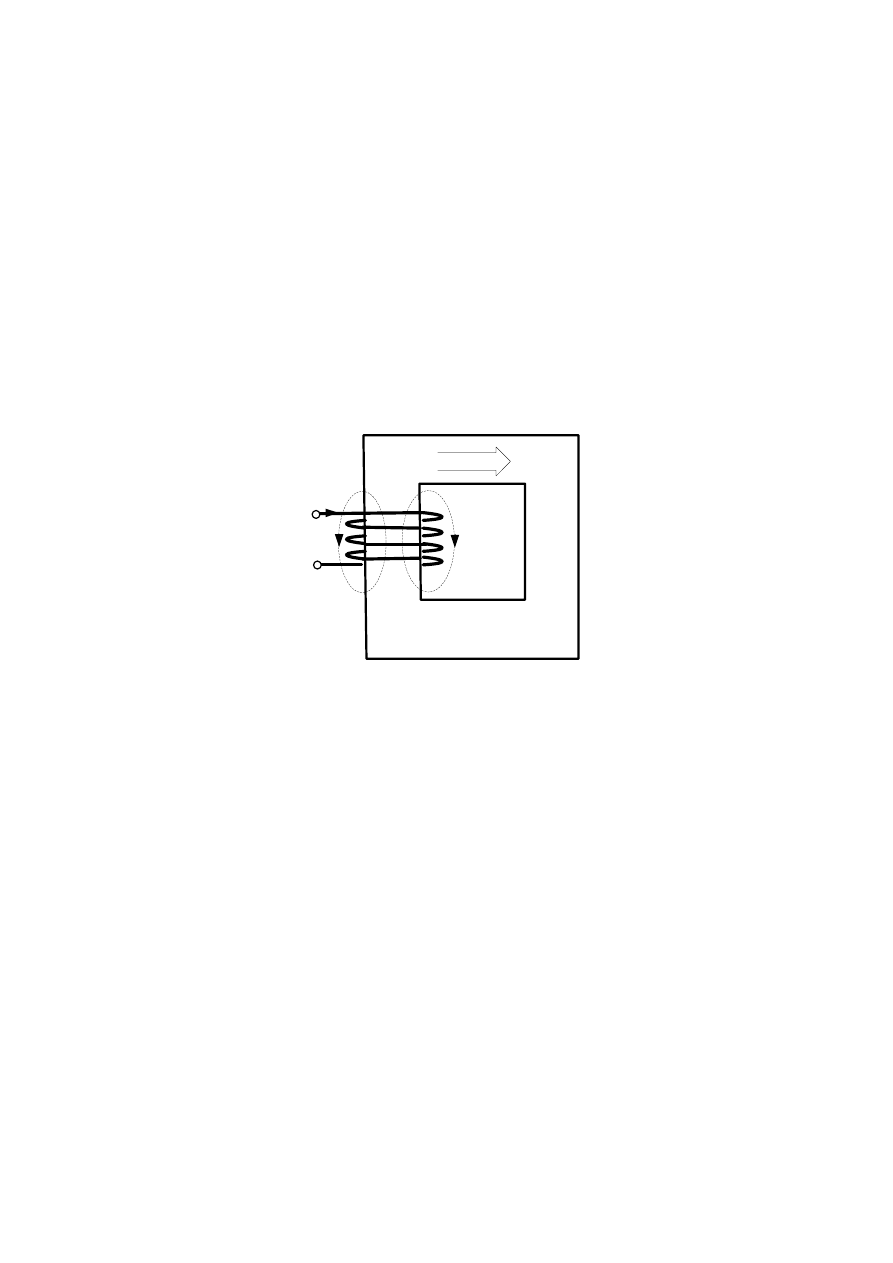
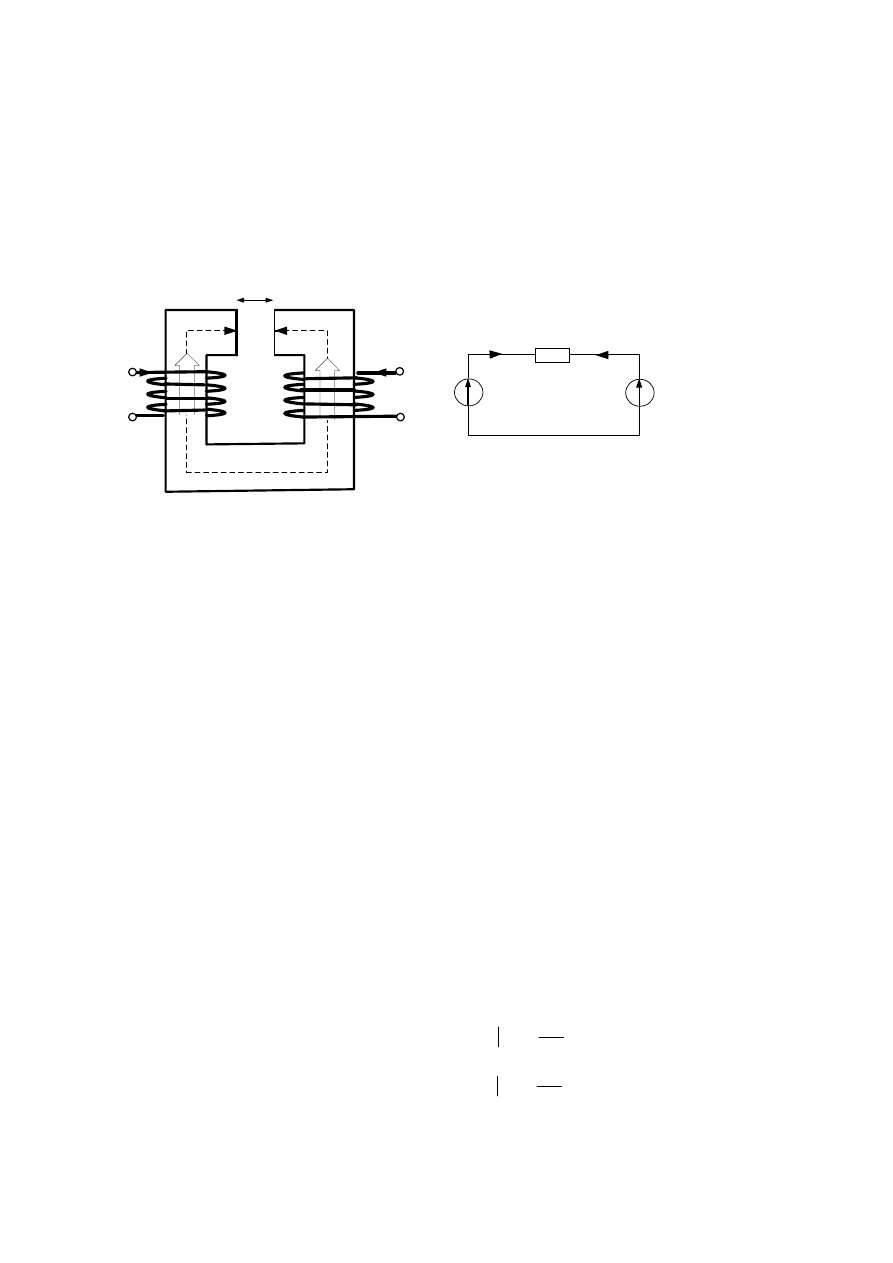
Obwodem magnetycznym nazywamy przestrzeń, w której zamyka się strumień magnetyczny.
Przykładem takiego obwodu może być stalowy rdzeń, na którym nawinięto cewkę o liczbie zwojów
w
(Rys. D.1.). Pod wpływem wymuszonego prądu płynącego w cewce powstaje w rdzeniu pole
magnetyczne. Linie sił pola magnetycznego przebiegające w rdzeniu tworzą strumienie główne
Φ
(zamykające się przez rdzeń) oraz rozproszenia
σ
Φ
(zamykający się przez powietrze). Zazwyczaj
strumień rozproszenia stanowi kilka procent strumienia głównego i często w rozważaniach bywa
pomijany.
i
Φ
σ
Φ
σ
Φ
w
Rys. D.1. Przykład obwodu magnetycznego
W dalszej kolejności rozważać będziemy jedynie strumienie główne, więc założymy, że strumień
całkowity wytworzony przez prąd w cewce równa się strumieniowi głównemu, który przenika przez
przekroje elementów rdzenia. Dla obwodów magnetycznych występują pewne analogie z obwodami
elektrycznymi, a wielkość
i
⋅
=
Θ
w
nazywa się siłą magnetomotoryczną lub przepływem.
D.2. Prawo Ohma dla obwodów magnetycznych
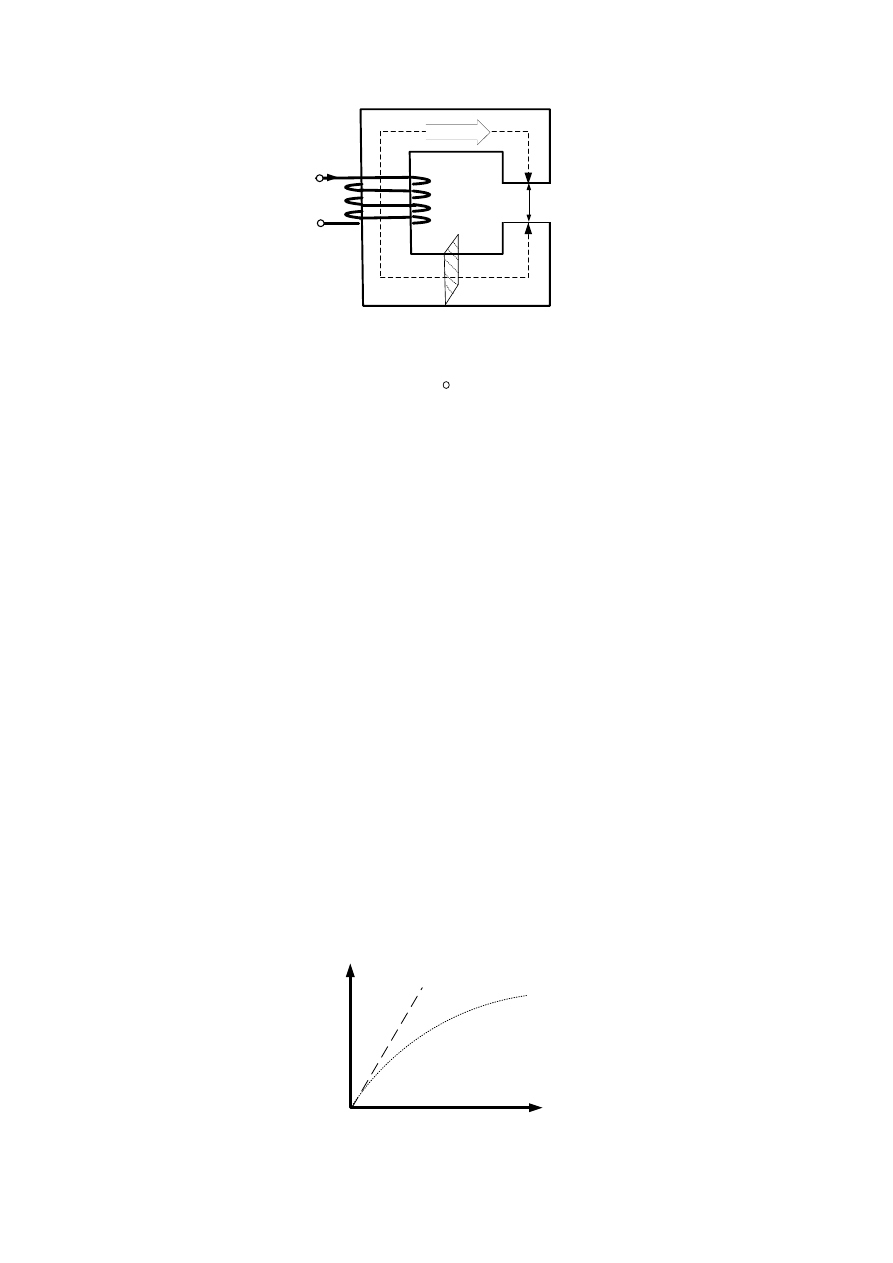
Rozważania dotyczące analiz obwodów magnetycznych rozpoczniemy od postawienia zadania
polegającego na określeniu strumienia głównego cewki nawiniętej na stalowym rdzeniu (Rys. D.2.) o
przekroju S zawierającą szczelinę powietrzną
δ
.
i
Φ
Fe
l
S
δ
l
w
Rys. D.2. Obwód magnetyczny ze szczeliną powietrzną
Zapisując prawo przepływu (Ampera)
∫
=
Θ
=
⋅
→
→
i
dl
H
w dla rozpatrywanego obwodu
magnetycznego z Rys. D.2. otrzymamy
Θ
=
⋅
+
⋅
δ
δ
l
l
H
H
Fe
Fe
(D.1)
gdzie
Fe
H
- natężenie pola magnetycznego w żelazie [A/m]
Fe
l
- długość linii sił pola magnetycznego w żelazie [m]
δ
H - natężenie pola magnetycznego w szczelinie powietrznej [A/m]
δ
l
- długość linii sił pola magnetycznego w szczelinie powietrznej [m]
Ponieważ obwód magnetyczny jest nierozgałęziony, dlatego ogólna formuła określająca strumień
magnetyczny
∫∫
→
→
⋅
=
Φ
S
s
B d może zostać zastąpiona wyrażeniem
Φ
=
Φ
=
Φ
δ
Fe
(D.2)
gdzie
S
⋅
=
Φ
Fe
Fe
B
[Wb]
S
⋅
=
Φ
δ
δ
B
[Wb]
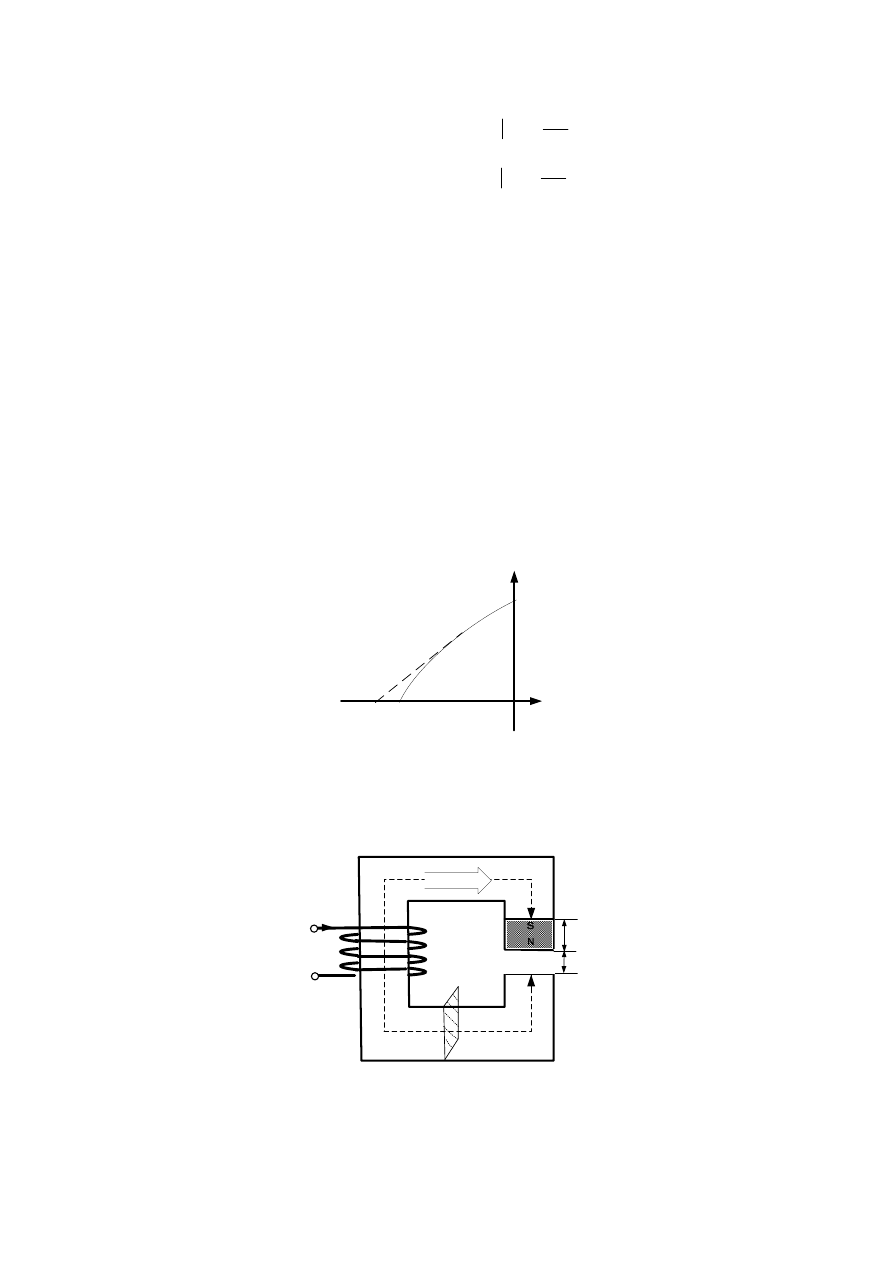
a zależność określającą indukcję
Fe
B należy określić zgodnie z charakterystykami magnesowania stali
(Rys. D.3.), gdzie
Fe
µ
nosi nazwę przenikalności magnetycznej. Jednostką indukcji magnetycznej jest
tesla [T]
Fe
Fe
Fe
H
B
µ
=
(3)
Fe
H
Fe
B
Rys. D.3. Przykładowa charakterystyka magnesowania żelaza
Jeżeli założyć, że uwzględniamy liniową aproksymację magnesowania to wówczas będziemy
rozważać cewkę o charakterystyce liniowej, czyli
i
~
Φ
.
Dokonując przekształceń po zdefiniowaniu zależności na indukcję w szczelinie powietrznej
δ
δ
µ
=
H
B
0
(
7
0
10
4
−
⋅
π
=
µ
[V][s]/[A][m]) otrzymamy
S
Fe
Fe
Fe
Fe
B
H
µ
Φ
=
µ
=
(D.4)
S
0
0
µ
Φ
=
µ
=
δ
δ
B
H
(D.5)
Podstawiając wyrażenia (D.4), (D.5) do zależności opisującej prawo przepływu (D.1) dostaje się
następujące wyrażenie
Θ
=
µ
Φ
+
µ
Φ
δ
S
l
S
l
0
Fe
Fe
(D.6)
Definiując reluktancję
µ
R
(opór magnetyczny) dla elementów obwodu magnetycznego
S
l
R
Fe
Fe
Fe
µ
=
µ
(D.7)
S
l
R
0
µ
=
δ
µδ
(D.8)
dostaje się dla wyrażenia (D.6) postać prawa Ohma dla obwodów magnetycznych w następującej
formie
Θ
=
+
Φ
µδ
µ
)
R
R
(
Fe
(D.9)
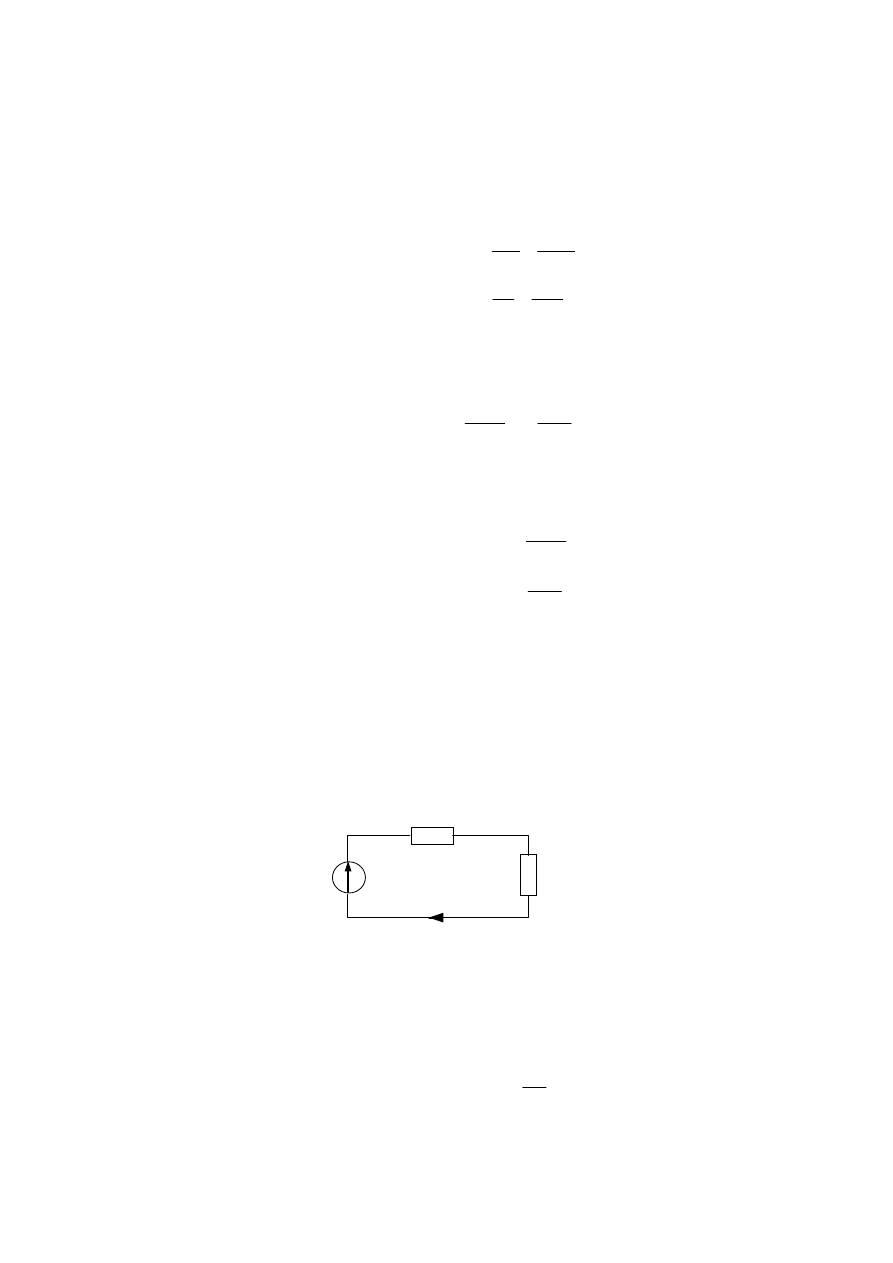
Można, więc obwód magnetyczny z Rys. D.2. Zastąpić równoważnym obwodem elektrycznym
(Rys. D.4.)
Fe
µ
R
i
w
=
Θ
µδ
R
Φ
Rys. D.4. Schemat zastępczy obwodu magnetycznego z Rys. D.2.
Podobnie jak dla obwodów elektrycznych w obwodach magnetycznych istnieje pojęcie
przewodności tylko magnetycznej, będącej odwrotnością reluktancji i nazywa się ją permeancją.
Jednostką permeancji jest Henr [H].
µ
=
Λ
R
1
(D.10)
Prawo Ohma dla obwodów magnetycznych może mieć również postać
µ
Λ
=
Φ
U
(D.11)
gdzie
µ
U
jest tzw. napięciem magnetycznym.
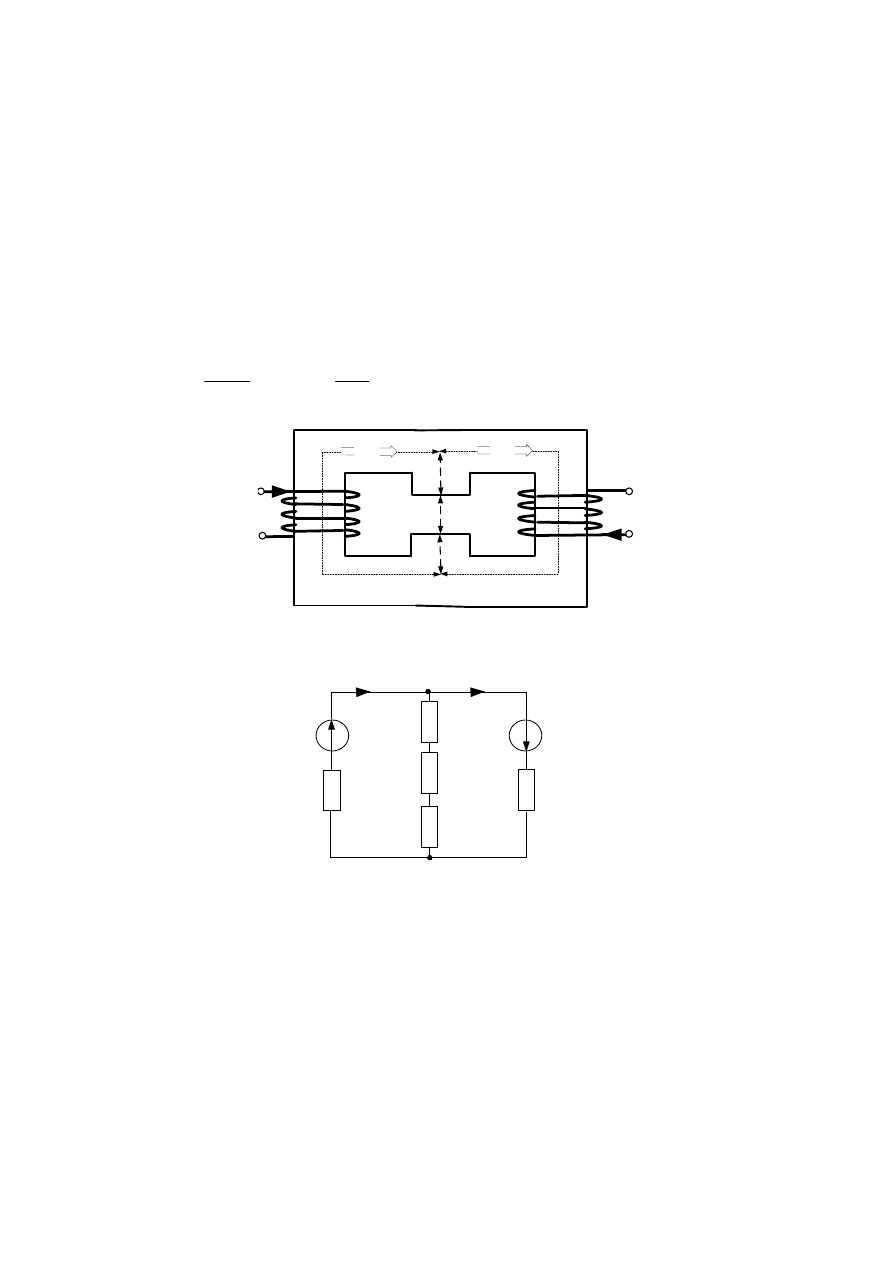
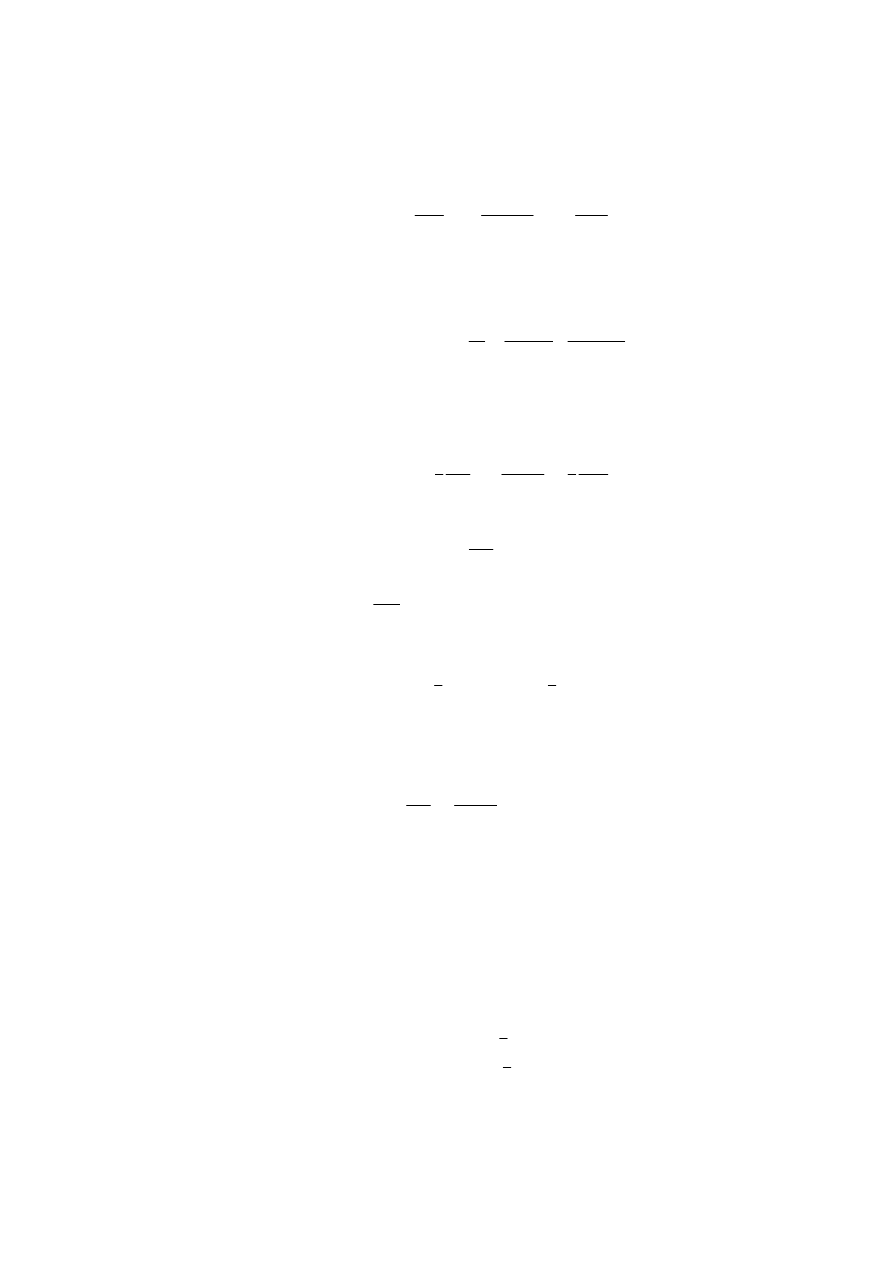
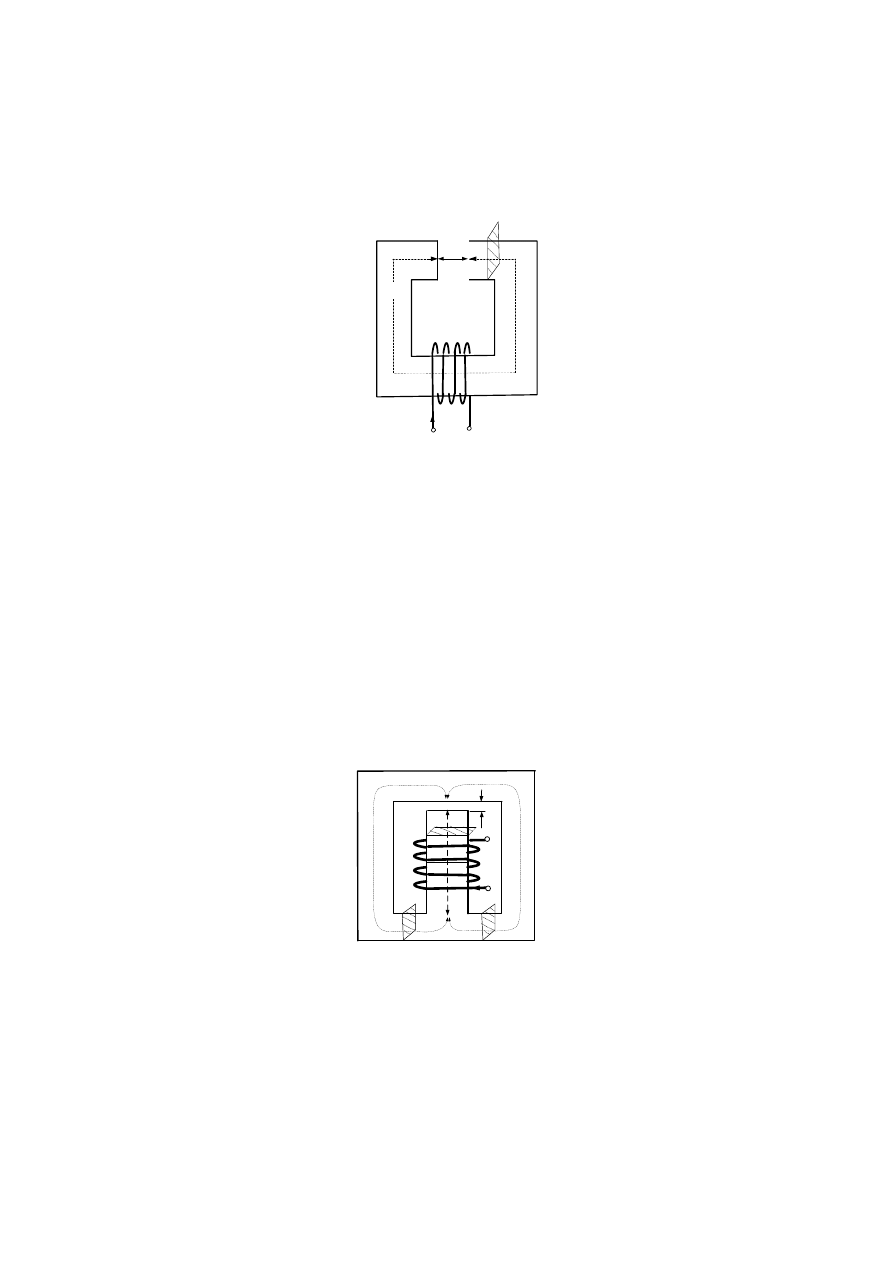
D.3. Rozgałęzione obwody magnetyczne
Poprzez analogię obwodów magnetycznych do obwodów elektrycznych można tworzyć zastępcze
równoważne obwody i dla nich zastosować prawa Kirchhoffa w celach analiz rozpływu strumieni w
obwodach magnetycznych. Ilustruje to następujący przykład rozgałęzionego obwodu magnetycznego
(Rys. D.5.) i odpowiadający temu obwodowi równoważny schemat elektryczny (Rys. D.6), dla
którego
i
Fe
i
i
S
l
R
µ
=
µ
oraz
S
l
R
0
µ
=
δ
µδ
.
1
i
Fe
µ
2
i
1
w
1
l
2
l
3
l
s
2
w
δ
l
4
l
2
Φ
1
Φ
s
s
s
Rys. D.5. Przykładowy rozgałęziony obwód magnetyczny
1
R
µ
1
1
1
w i
=
Θ
µδ
R
1
Φ
2
2
2
w i
=
Θ
2
R
µ
3
R
µ
4
R
µ
2
Φ
Rys. D.6. Schemat zastępczy obwodu magnetycznego z Rys. D.5.
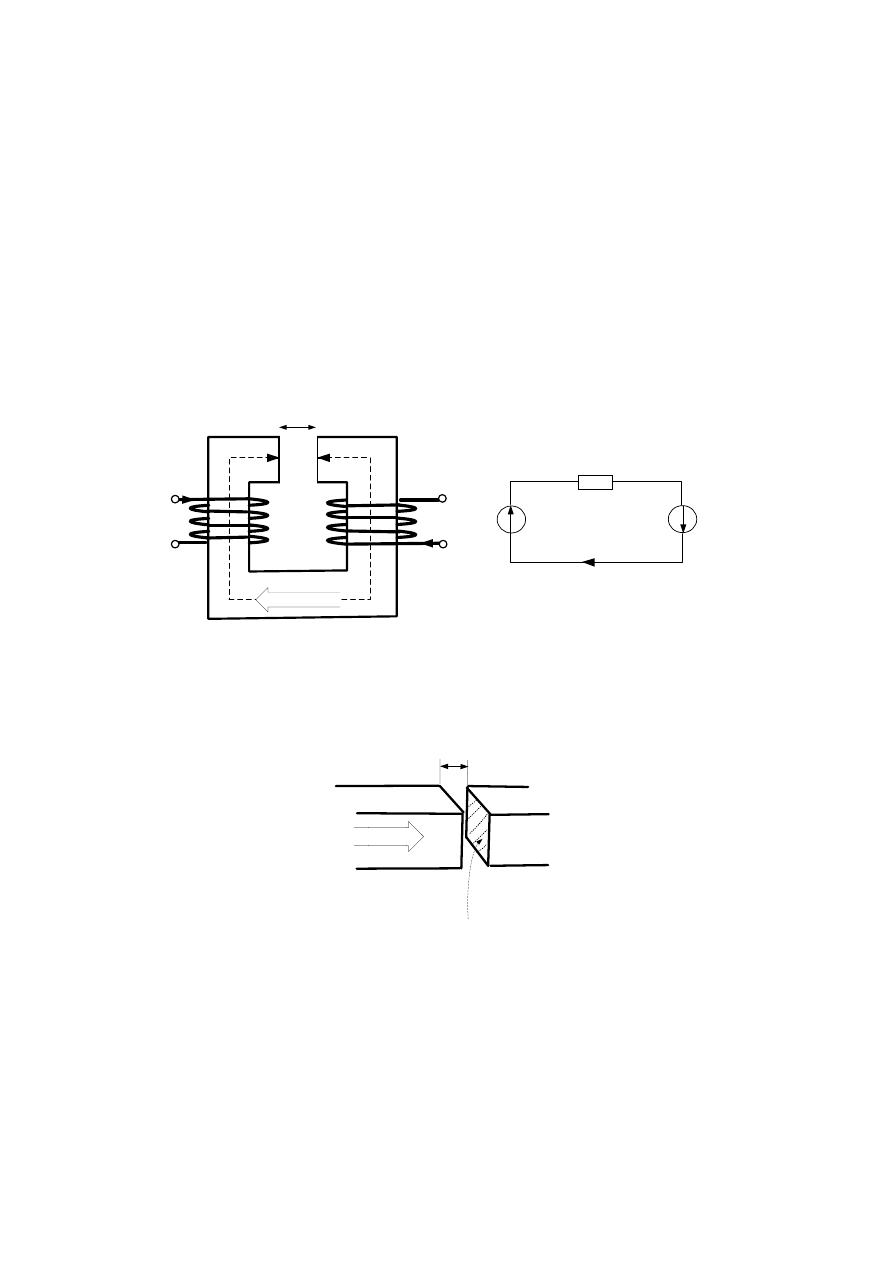
D.4. Indukcyjności własne i wzajemne cewek
Dla ilustracji analiz głównych strumieni sprzężonych cewek zostanie rozpatrzony układ dwóch
cewek nawiniętych na wspólnym rdzeniu ze szczeliną powietrzną (Rys. D.7. – Dla uproszczenia
przyjęto
∞
→
µ
rFe
).
1
1
1
w i
=
Θ
µδ
R
1
Φ
2
2
2
w i
=
Θ
2
Φ
1
i
1
w
1
Φ
Fe
l
δ
l
S
∞
→
µ
Fe
r
2
i
S
2
w
2
Φ
⇔
Rys. D.7. Układ dwóch cewek sprzężonych i odpowiadający im schemat zastępczy
Strumieniem skojarzonym cewki nazywać będziemy iloczyn strumienia i liczby zwojów
1
1
1
w
Φ
=
Ψ
,
2
2
2
w
Φ
=
Ψ
(D.12)
Ponieważ strumienie
1
Φ
i
2
Φ
mogą być wzbudzane zarówno przez prądy cewek 1 i 2, dlatego
można dokonać superpozycji strumieni pochodzących od tych prądów
12
11
1
Φ
+
Φ
=
Φ
(D.13)
22
21
2
Φ
+
Φ
=
Φ
(D.14)
gdzie
11
Φ
- strumień zamykający się przez cewkę 1, wzbudzony przez cewkę 1
12
Φ
- strumień zamykający się przez cewkę 1, wzbudzony przez cewkę 2
21
Φ
- strumień zamykający się przez cewkę 2, wzbudzony przez cewkę 1
22
Φ
- strumień zamykający się przez cewkę 2, wzbudzony przez cewkę 2
Zależność określająca strumienie skojarzone przybiera, zatem formę
12
1
11
1
1
w
w
Φ
+
Φ
=
Ψ
, (D.15)
22
2
21
2
2
w
w
Φ
+
Φ
=
Ψ
(D.16)
Zgodnie ze schematem zastępczym z Rys. D.7.
Λ
Θ
=
Θ
=
Φ
=
Φ
µδ
=
1
1
0
1
11
2
R
i
(D.17)
Λ
Θ
=
Θ
=
Φ
=
Φ
µδ
=
2
2
0
1
12
1
R
i
(D.18)
Λ
Θ
=
Θ
=
Φ
=
Φ
µδ
=
1
1
0
2
21
2
R
i
(D.19)
Λ
Θ
=
Θ
=
Φ
=
Φ
µδ
=
2
2
0
2
22
1
R
i
(D.20)
więc
2
12
1
11
2
2
1
1
2
1
1
L
L
)
w
w
(
)
w
(
i
i
i
i
+
=
Λ
+
Λ
=
Ψ
, (D.21)
2
22
1
21
2
2
2
1
2
1
2
L
L
)
w
(
)
w
w
(
i
i
i
i
+
=
Λ
+
Λ
=
Ψ
(D.22)
Z powyższej zależności widać, że dla liniowego obwodu magnetycznego strumienie sprzężone są
liniową kombinacją prądów, a współczynniki
11
L
i
22
L
noszą nazwę indukcyjności własnych,
natomiast
21
12
L
L
=
nazywa się indukcyjnościami wzajemnymi cewek.
D.5. Obwody magnetyczne z magnesem trwałym
Magnesy trwałe charakteryzuje się za pomocą krzywej odmagnesowania, czyli części pętli
histerezy z II ćwiartki wykresu
)
(
H
f
B
=
. Dla magnesów z ziem rzadkich typu NdFeB oraz SmCo
można przyjmować liniową aproksymację ch-ki odmagnesowania (Rys. D.8.), gdzie
r
B
jest indukcją
remanentu (rzędu 1.0÷1,3[T]), natomiast
c
H
jest natężeniem koercji (rzędu 800÷1000[kA/m]).
m
H
m
B
r
B
c
H
Rys. D.8. Charakterystyka demagnesowania magnesów z ziem rzadkich
Do analizy przypadku obwodu magnetycznego z magnesem trwałym rozważymy przykład rdzenia
stalowego, na którym nawinięto cewkę (dla rdzenia zaniedbamy spadki napięć magnetycznych) w
obwodzie, którego znajduje się magnes trwały o przekroju
S
oraz szczelina powietrzna
δ
.
i
Φ
Fe
l
δ
l
S
∞
→
µ
Fe
r
m
l
w
Rys. D.9. Obwód magnetyczny z magnesem trwałym
Zapisując prawo przepływu dla analizowanego obwodu magnetycznego z Rys. D.9. otrzymujemy

Θ
=
⋅
+
⋅
+
⋅
δ
δ
l
l
l
H
H
H
m
m
Fe
Fe
(D.23)
gdzie
m
H - natężenie pola magnetycznego w magnesie [A/m]
m
l
- długość linii sił pola magnetycznego w magnesie [m]
Ponieważ zakładaliśmy, że
∞
→
µ
Fe
więc zależność (D.23) upraszcza się do postaci
Θ
=
⋅
+
⋅
δ
δ
l
l
H
H
m
m
(D.23)
Charakterystykę odmagnesowania z Rys. D.8. można aproksymować następującą zależnością
m
rm
r
m
H
B
µ
µ
+
=
0
B
lub
m
r
m
H
B
)
1
(
B
0
χ
+
µ
+
=
(D.24)
gdzie
rm
µ
- przenikalność magnetyczna względna magnesu (dla magnesów z ziem rzadkich wynosi ona
1.02 ÷ 1.1 przez co objętość magnesu może być z pewnym przybliżeniem traktowana jak
powietrze)
χ
- podatność magnetyczna
Po przekształceniach zależności
)
(
H
f
B
=
dla szczeliny i magnesu otrzymuje się wyrażenia
opisujące natężenia pola magnetycznego
0
µ
=
δ
δ
B
H
(D.25)
rm
r
m
m
B
H
µ
µ
−
=
0
B
(D.26)
Ponieważ obwód magnetyczny (Rys. D.9) jest nierozgałęziony, więc
Φ
=
Φ
=
Φ
δ
m
. Ze względu
na jednakowy przekrój dla szczeliny i magnesu również indukcje w szczelinie i magnesie są sobie
równe (
B
B
B
m
=
=
δ
). Można, zatem prawo przepływu (D.23) dla tego obwodu magnetycznego,
zapisać w następującej formie
Θ
=
µ
+
µ
µ
−
δ
l
l
0
0
B
B
B
m
rm
r
(D.27)
Wprowadzając oznaczenie
rm
m
m
µ
=
l
l
'
można zapisać zależność na indukcję w szczelinie i magnesie
następująco
δ
δ
+
+
+
µ
Θ
=
l
l
l
B
l
l
'
'
'
0
m
m
r
m
B
(D.28)
Po wprowadzeniu zależności na strumień
S
⋅
=
Φ
B
do (D.28) i wykonaniu formalnych
przekształceń matematycznych otrzymamy prawo Ohma dla obwodu magnetycznego, w którym
umieszczony jest magnes trwały
0
'
0
'
l
B
S
l
l
µ
+
Θ
=
µ
+
Φ
δ
m
r
m
(D.29)
co można również przedstawić następująco
m
F
R
+
Θ
=
Φ
µ
(D.30)
gdzie
µ
R - zastępcza reluktancja obwodu magnetycznego (
m
µ
µδ
µ
+
=
R
R
R
;
S
l
R
0
µ
=
δ
µδ
;
S
l
R
0
'
µ
=
µ
m
m
)
m
F
- siła magnetomotoryczna magnesu (
0
'
l
B
F
µ
=
m
r
m
)
Zastępczy schemat obwodu magnetycznego z magnesem trwałym z Rys. D.9. wygląda, więc
następująco
i
w
=
Θ
µδ
R
Φ
m
F
m
µ
R
Rys. D.10. Schemat zastępczy obwodu magnetyczny z magnesem trwałym
W stanie bezprądowym indukcja
0
B
=
B
i przedstawia się następująco
δ
+
=
l
l
l
B
B
'
'
0
m
m
r
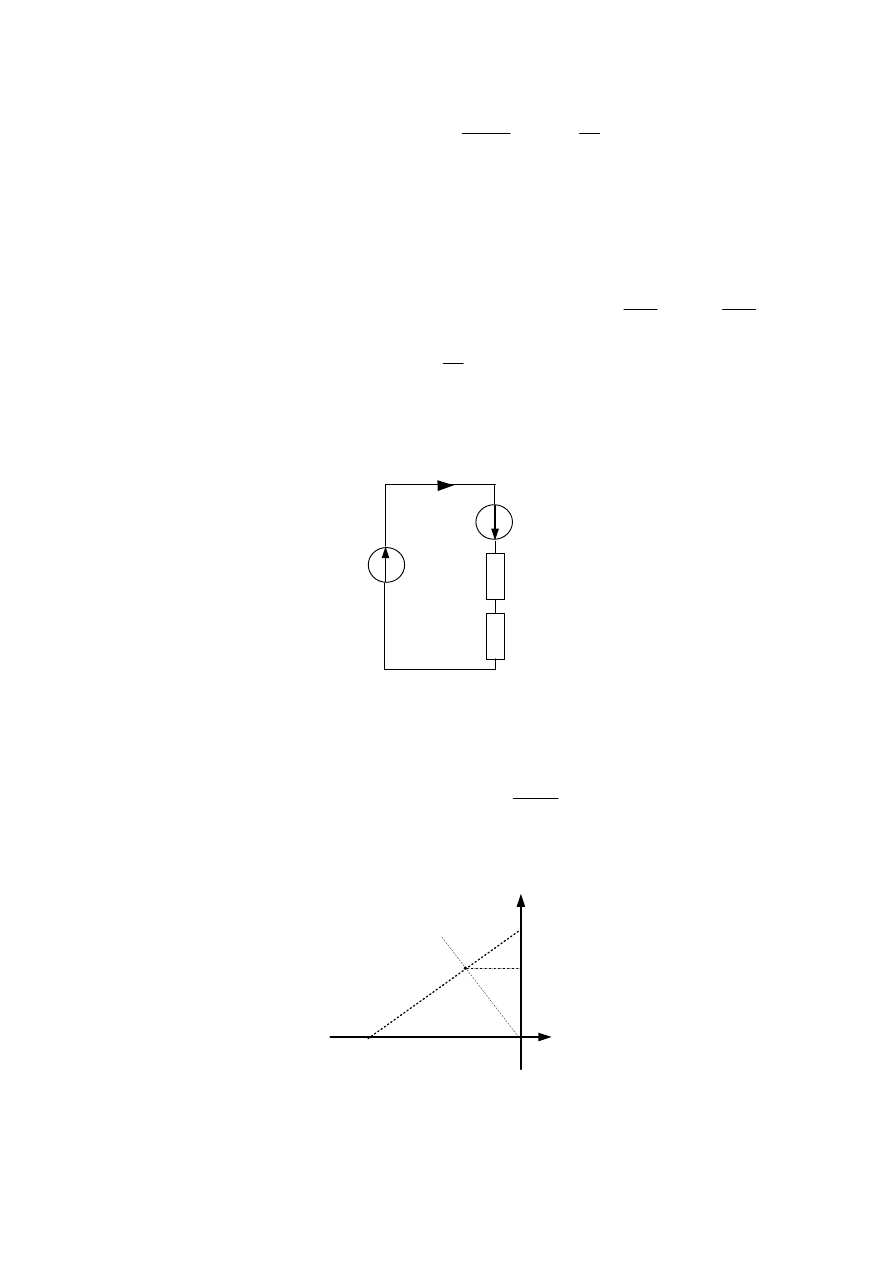
(D.31)
Z zależności (D.31) wynika tzw. punkt pracy magnesu trwałego
m
H
m
B
r
B
c
H
0
B
Rys. D.11. Położenie punktu pracy magnesu trwałego
Dla zmieniającej się szczeliny punkt pracy
0
B
przesuwa się w zależności od wielkości szczeliny
δ
l
zgodnie z poniższym rysunkiem
m
H
m
B
r
B
c
H
0
l
δ
=
δ
0
l
δ
>
δ
0
l
δ
<
δ
Rys. D.12. Przesunięcie punktu pracy magnesu trwałego wskutek zmian szczeliny powietrznej
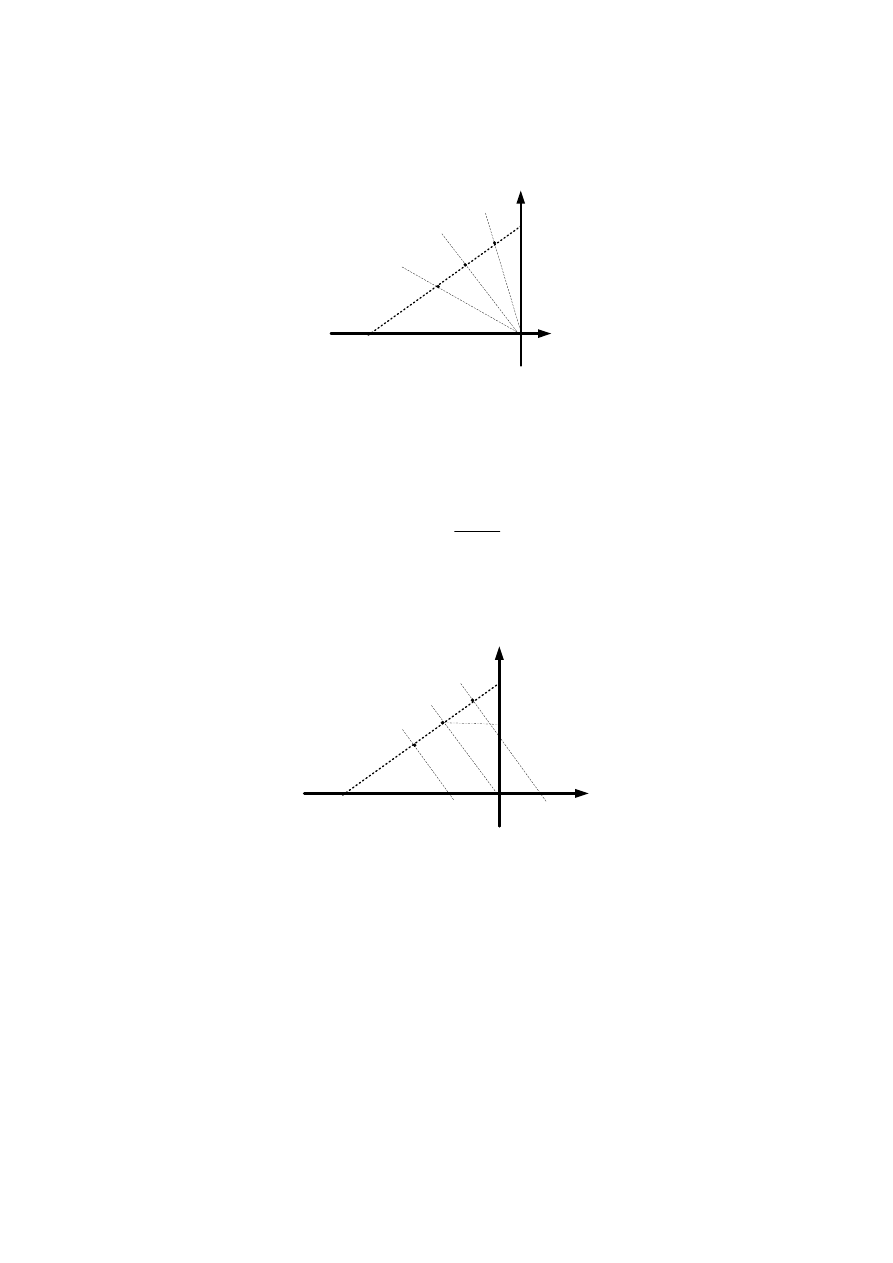
Poddając magnes trwały zewnętrznemu oddziaływaniu pola magnetycznego wytworzonego przez
cewkę z prądem możemy, również doprowadzić do zmiany położenia punktu pracy wskutek
domagnesowania (
0
>
i
) lub odmagnesowania (
0
<
i
) magnesu.
Zgodnie z wcześniej wyprowadzoną zależnością (D.28)
0
0
'
0
B
k
B
l
l
w
+
=
+
+
µ
=
δ
i
i
B
m
(D.32)
widać, że punkt pracy będzie się również przesuwał pod wpływem zewnętrznego pola magnetycznego
wzbudzanego przez prąd cewki.
m
H
m
B
r
B
c
H
0
=
i
0
B
0
>
i
0
<
i
Rys. D.13. Przesunięcie punktu pracy magnesu trwałego wskutek oddziaływania cewki z prądem
Z Rys. D.13. można zauważyć, że pod wpływem oddziaływania demagnesujacego zewnętrznego
pola magnetycznego wytworzonego przez cewkę z prądem może dojść nawet do całkowitego
odmagnesowania magnesu, co będzie skutkować jego zniszczeniem.
D.6. Energia pola magnetycznego
Poprzednie rozważania, w których określono wartości indukcji oraz natężenia pola magnetycznego
dla elementów obwodu magnetycznego były zależnościami uwzględniającymi jednowymiarowy (1-D)
rozkład pola magnetycznego, co dla prostych obwodów magnetycznych jest wystarczającym
przybliżeniem z technicznego punktu widzenia. Na podstawie znajomości rozkładu indukcji oraz
natężenia pola magnetycznego, można wyznaczyć gęstość energii pola magnetycznego (
g
w ) zawartej
w jednostce objętości dowolnej przestrzeni g

∫
=
B
g
B
H
w
0
d
(D.33)
Energia pola magnetycznego będzie, więc zależna od objętości
g
V dla przestrzeni g i w ogólnym
przypadku wyrażać się będzie zależnością
V
B
H
V
w
E
g
g
V
B
V
g
d
)
d
(
d
0
∫ ∫
∫
=
=
(D.34)
Na podobnej zasadzie można zdefiniować gęstość objętościową ko-energii, jako
∫
=
H
g
H
B
w
0
0
d
(D.35)
oraz ko-energię
V
H
B
V
w
E
g
g
V
H
V
g
d
)
d
(
d
0
0
0
∫ ∫
∫
=
=
(D.36)
O ile definicja gęstości energii jest zawsze poprawna o tyle definicja gęstości objętościowej ko-
energii jest słuszna jedynie dla elementów obwodu magnetycznego posiadających swe charakterystyki
w I ćwiartce zależności
)
(
H
f
B
=
. Charakterystyki magnesów trwałych są opisywane funkcjami z II
ćwiartki zależności
)
(
m
m
H
f
B
=
, dlatego wiec należy dla magnesów trwałych zmodyfikować
definicję gęstości objętościowej ko-energii do postaci
∫
=
m
c
H
m
m
m
H
B
w
H
0
d
(D.37)
Ko-energia pola magnetycznego zawarta w magnesie o objętości
m
V wyrażać się będzie
następującą zależnością
V
H
B
V
w
E
m
m
c
m
V
H
m
m
V
m
d
)
d
(
d
H
0
0
∫ ∫
∫
=
=
(D.38)
W celu przeprowadzenia dalszych analiz zależności energetycznych dla pola magnetycznego
podeprzemy się obwodem magnetycznym z Rys. D.9. Zgodnie z założeniami do tego przykładu w
przestrzeni rdzenia stalowego nie ma spadków napięć magnetycznych, więc cała energia pola
magnetycznego koncentrować się będzie w przestrzeni magnesu trwałego oraz szczeliny powietrznej.
Φ
δ
l
S
Fe
m
l
N
S
Fe
Rys. D.14. Przestrzenie szczeliny powietrznej oraz magnesu trwałego
Ko-energię dla tego przypadku można, zatem przedstawić, jako sumę ko-energii szczeliny i
magnesu
m
E
E
E
0
0
0
+
=
δ
(D.39)
gdzie
∫
δ
δ
δ
=
V
dV
w
E
0
0
(D.40)
∫
=
m
V
m
m
dV
w
E
0
0
(D.41)
Ponieważ indukcje w szczelinie i magnesie można zapisać zgodnie z wcześniejszymi założeniami
następująco
δ
δ
µ
=
H
B
0
;
m
rm
r
m
H
B
µ
µ
+
=
0
B
, więc gęstości ko-energii dla rozważanego przypadku
przybierają formę
2
0
2
1
0
0
d
δ
δ
δ
δ
µ
=
=
∫
δ
H
H
B
w
H
(D.42)
)
H
(
)
H
(
d
2
2
0
2
1
H
0
c
m
rm
c
m
r
H
m
m
m
H
H
B
H
B
w
m
c
−
µ
µ
+
−
=
=
∫
(D.43)
Zależności (D.42) oraz (D.43) opisujące gęstości ko-energii w szczelinie i magnesie można
również wyrazić, jako funkcje indukcji. Po formalnych przekształceniach matematycznych otrzymuje
się następujące ogólne formuły przedstawiające gęstości objętościowe ko-energii oraz funkcje ko-
energii dla szczeliny i magnesu
0
2
2
1
0
µ
=
δ
δ
B
w
(D.44)
rm
m
m
B
w
µ
µ
=
0
2
2
1
0
(D.45)
∫
δ
δ
δ
µ
=
V
V
B
E
d
2
1
2
0
0
(D.46)
∫
µ
µ
=
m
V
m
rm
m
V
B
E
d
2
1
2
0
0
(D.47)
Dla rozważanego przykładu z Rys. D.9., gdzie indukcje w szczelinie i magnesie są sobie równe
(
B
B
B
m
=
=
δ
) zależność (D.39) opisująca ko-energie upraszcza się do następującej formuły
)
l
l
(
2
S
V
2
V
2
'
0
2
0
2
0
2
0
m
m
rm
B
B
B
E
+
µ
=
µ
µ
+
µ
=
δ
δ
(D.48)
Wyznaczając strumień zgodnie z formułą (D.30) obowiązującą dla schematu zastępczego z Rys.
D.10., można indukcje dla tego przypadku przedstawić następująco
S
R
F
w
S
R
F
µ
µ
+
=
+
Θ
=
Φ
=
m
m
i
S
B
(D.49)
Po podstawieniu zależności (D.49) do wzoru (D.48) i wykonaniu formalnych przekształceń,
otrzymujemy zależność na ko-energię w następującej formie
µ
µ
µ
+
+
=
R
F
R
F
w
R
w
2
2
1
2
2
2
1
0
m
m
i
i
E
(D.50)
Definiując indukcyjność dla cewki, jako
µ
=
R
w
L
2
oraz strumień w stanie bezprądowym
(pochodzący od magnesu), jako
µ
=
Φ
R
F
0
m
, ko-energię opisaną zależnością (D.50) można zapisać
również następująco
2
0
2
1
0
2
2
1
0
R
w
L
Φ
+
Φ
+
=
µ
i
i
E
(D.51)
Na podstawie zależności na strumień z formuły (D.30) można zdefiniować tzw. charakterystykę
cewki, czyli zależność strumienia skojarzonego z cewką (
Ψ
) od prądu ( i )
0
0
2
L
w
L
R
F
w
R
w
)
(
Ψ
+
=
Φ
+
=
+
=
Φ
=
Ψ
µ
µ
i
i
i
w
i
m
(D.52)
gdzie
0
Ψ
jest strumieniem skojarzonym z cewka w stanie bezprądowym
Analizując zależność (D.51) zauważamy, że ko-energia układu złożonego z cewki oraz magnesu
trwałego posiada dwa człony, jeden zależny, a drugi niezależny od prądu odpowiadający ko-energii
zgromadzonej w układzie w stanie bezprądowym
m
E
i
E
E
0
0
0
)
(
+
=
Θ
(D.53)
gdzie
i
i
E
0
2
2
1
0
L
Ψ
+
=
Θ
(D.54)
2
0
2
1
0
R
Φ
=
µ
m
E
(D.55)
Zależność (D.54) może zostać również uogólniona do postaci jak jest używana do opisu
energetycznego cewek nie zawierających w swym obwodzie magnetycznym magnesów trwałych
∫
Ψ
=
Θ
i
di
i
E
0
0
)
(
(D.56)
przy czym
)
(i
Ψ
określa się używając formuły (D.52).
Przedstawione wyprowadzenie może zostać, więc rozszerzone i wykorzystane do opisu
energetycznego układów złożonych z większej liczby cewek sprzężonych, zawierających w swym
obwodzie magnetycznym magnesy trwałe.
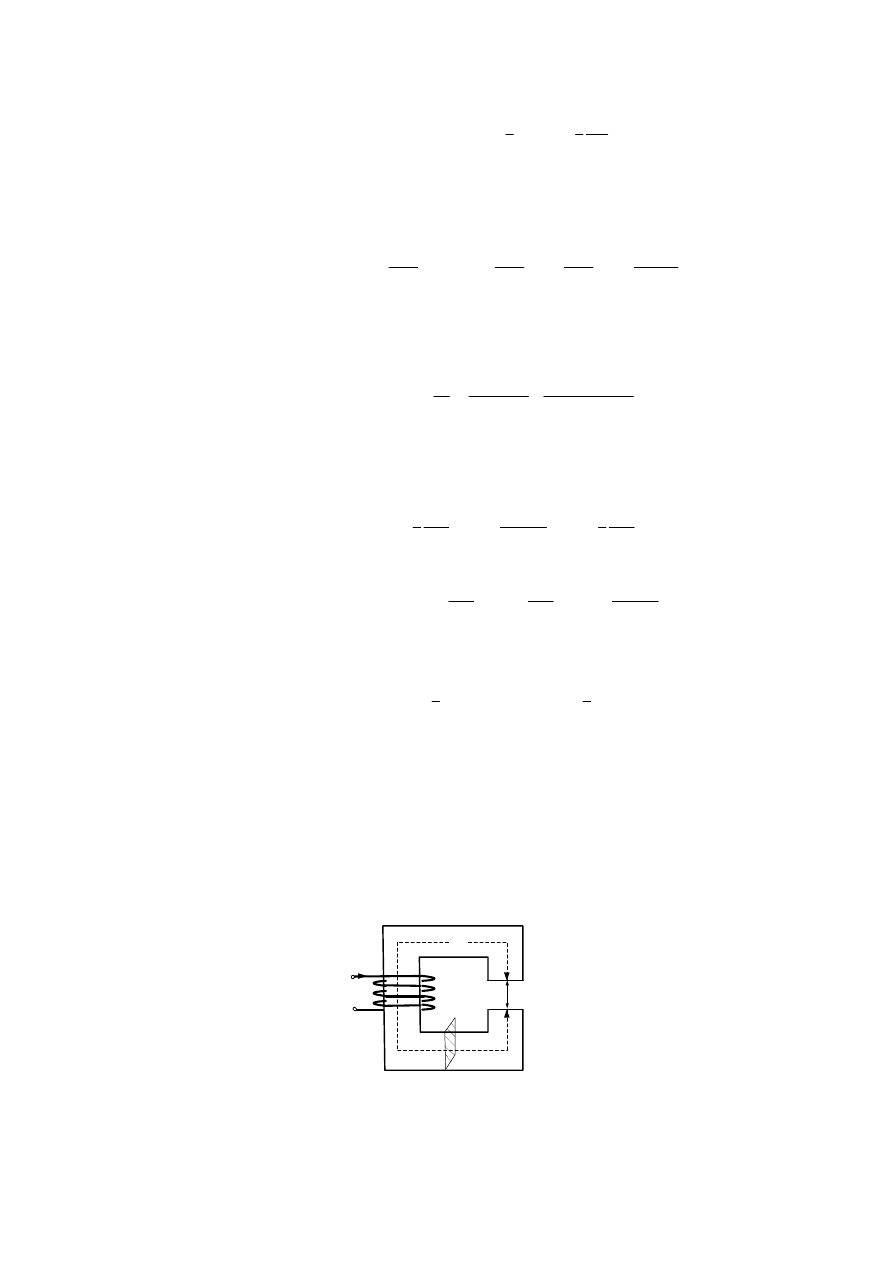
D.7. Zależności energetyczne dla układu cewek liniowych
W celu przeprowadzenia analiz zależności energetycznych dla pola magnetycznego wzbudzanego
przez układ cewek podeprzemy się obwodem magnetycznym z dwoma cewkami z Rys. D.15.
1
1
1
w i
=
Θ
µδ
R
Φ
2
2
2
w i
=
Θ
1
i
1
w
Fe
l
δ
l
S
∞
→
µ
Fe
r
2
i
S
2
w
Φ
⇔
Rys. D.15. Układ dwóch cewek sprzężonych i odpowiadający im schemat zastępczy
Zakładając, że w przestrzeni rdzenia stalowego nie ma spadków napięć magnetycznych
(
∞
→
µ
Fe
r
), więc cała energia pola magnetycznego koncentrować się będzie w przestrzeni szczeliny
powietrznej.
Φ
δ
l
S
Fe
Fe
Rys. D.16. Przestrzeń szczeliny powietrznej
Ko-energię dla tego przypadku można, zatem przedstawić, jako
∫
δ
δ
δ
=
=
V
V
w
E
E
d
0
0
0
(D.57)
Ponieważ indukcja w szczelinie
B
H
B
=
µ
=
δ
δ
0
, więc gęstość ko-energii w szczelinie będzie
równa również gęstości energii i przybiera formę
0
2
2
1
2
0
2
1
0
0
µ
=
µ
=
=
δ
δ
δ
δ
∫
δ
B
H
dH
B
w
H
(D.58)
Zależności przedstawiająca funkcje ko-energii w tym przypadku będzie również tożsama z funkcją
energii
µδ
δ
δ
δ
=
µ
=
µ
=
µ
=
=
∫
δ
R
2
S
S
l
2
V
2
d
2
1
2
2
0
2
0
2
2
0
0
0
B
B
B
V
B
E
E
V
(D.59)
Wyznaczając strumień zgodnie z formułą (D.9), można indukcje dla tego przypadku przedstawić
następująco
S
R
w
w
S
R
2
2
1
1
2
1
µδ
µδ
+
=
Θ
+
Θ
=
Φ
=
i
i
S
B
(D.60)
Po podstawieniu zależności (D.60) do wzoru (D.59) i wykonaniu formalnych przekształceń,
otrzymujemy zależność na ko-energię
2
2
2
2
2
1
1
1
2
1
2
1
2
1
2
1
0
)
(
R
w
)
(
R
w
w
)
(
R
w
i
i
i
i
E
µ
µ
µ
+
+
=
(D.61)
Definiując indukcyjność dla cewek, jako
µ
=
R
w
L
2
1
11
,
µ
=
R
w
L
2
2
22
,
µ
=
R
w
w
L
2
1
12
można ko-energię
opisaną zależnością (D.61), zapisać zgodnie z dobrze znaną klasyczną postacią energii dla dwóch
cewek linowych w następującej formie
2
2
22
2
1
1
1
12
2
1
11
2
1
0
)
(
L
)
(
L
)
(
L
i
i
i
i
E
+
+
=
(D.62)
Zadania
D.1
Podać wzór na indukcyjność cewki nawiniętej (zgodnie z poniższym rysunkiem) na stalowym rdzeniu
o przekroju S. Jak zmieni się ta indukcyjność, jeżeli zaniedbujemy spadki napięć magnetycznych w
żelazie (
∞
→
µ
Fe
r
)? Jak wpływa powiększenie szczeliny powietrznej
δ
l
na wartość indukcyjności?
Zapisać zależność na ko-energie zgromadzona w układzie.
i
Fe
l
S
Fe
µ
δ
l
w
D.2
Cewka o
w
=500 zwojach przewodzi prąd
=
=
I
i
2A. Przekrój rdzenia wynosi S=0.8 10
-4
m
2
a
średnia długość linii sił pola magnetycznego w stalowym rdzeniu o przenikalności względnej
800
=
µ
Fe
r
wynosi
Fe
l
=0.15 m. Wyznaczyć wartość indukcji w szczelinie powietrznej o długości
δ
l
=0.5 mm.
i
Fe
l
δ
l
S
Fe
µ
w
D.3
Dla cewki o
=
w
800 zwojach nawiniętej na stalowym rdzeniu o
Fe
l
=0.3 m i
1000
=
µ
Fe
r
(przedstawionej na rysunku do zad. D.2), wyznaczyć wartość prądu potrzebnego do wytworzenia
indukcji w szczelinie powietrznej na poziomie 1 T, gdy efektywny przekrój szczeliny powietrznej
wynosi S=2500 mm
2
, a jej długość
δ
l
=2 mm. Jak zmieniłyby się ten prąd, gdyby założyć, że
∞
→
µ
Fe
r
?
D.4
Obwód magnetyczny z poniższego rysunku ma na środkowej części o przekroju
=
1
S
800 mm
2
nawiniętą cewkę o
w
=600 zwojach. Zakładając, że przekroje pozostałych gałęzi obwodu
magnetycznego maja przekroje
=
2
S
500 mm
2
, a szczelina powietrzna wynosi
δ
l
=1 mm, obliczyć
prąd wymagany do wzbudzenia strumienia magnetycznego w szczelinie powietrznej o wartości
Φ
=1
Wb. Założyć
600
=
µ
Fe
r
. Sprawdzić, jaki musiałby być ten prąd gdyby założyć, że
∞
→
µ
Fe
r
.
Fe
r
µ
i
w
1
l
2
l
1
S
2
S
2
S
2
l
δ
l
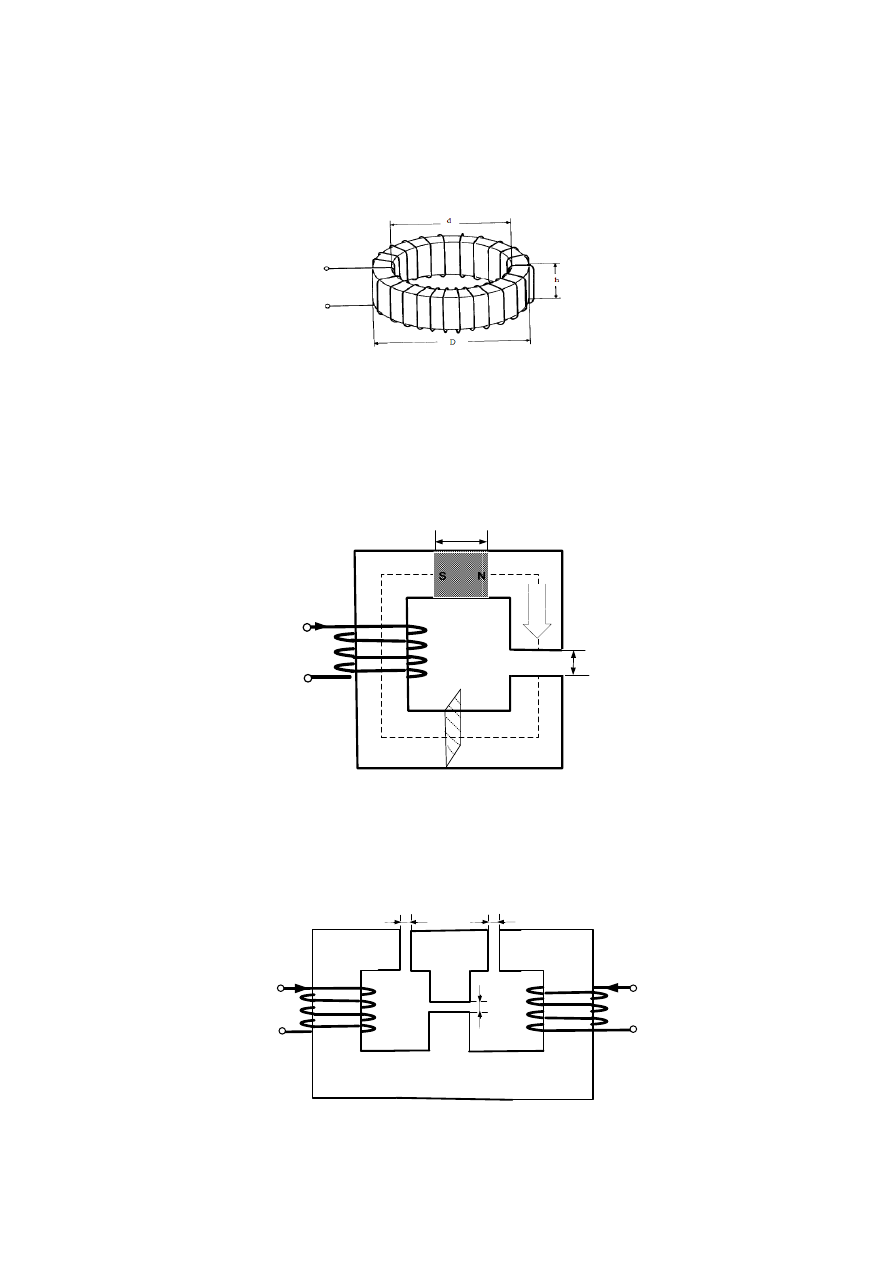
D.5
Dla cewki nawiniętej (jak na rysunku) na niemagnetycznym karkasie o wymiarach: d= 200 mm,
D=300 mm, h= 30 mm i 200 zwojach, obliczyć natężenie pola wewnątrz cewki, wartość indukcji oraz
strumień skojarzony z cewką, jeżeli prąd cewki wynosi 5 A. Jak zmienią się te wielkości, jeżeli karkas
zastąpimy rdzeniem stalowym o przenikalności względnej
400
=
µ
Fe
r
.
D.6
Dla obwodu magnetycznego, w którym umieszczono magnes trwały typu NdFeB o parametrach
B
r
=1.2 T; H
c
=1000 kA/m, dobrać długości magnesu l
m
oraz szczeliny
δ
l
(przy założeniu
jednorodnego przekroju dla szczeliny i magnesu S
δ
=S
m
=S=2000 mm
2
) takie, aby indukcja w
szczelinie wynosiła 0.6 T. Podać wartość oraz kierunek przepływu cewki taki by doprowadzić do
całkowitego odmagnesowania magnesu trwałego (
∞
→
µ
Fe
r
). Wyznaczyć ko-energie zgromadzoną w
układzie oraz strumień skojarzony z cewką dla stanu bezprądowego.
i
Φ
δ
l
S
∞
→
µ
Fe
r
m
l
w
D.7
Wyznaczyć indukcyjności własne i wzajemne cewek nawiniętych (zgodnie z poniższym rysunkiem)
na stalowym rdzeniu o jednorodnym przekroju S w którym występują szczeliny powietrzne o
wymiarach
δ
l
(zaniedbać spadki napięć magnetycznych w żelazie
∞
→
µ
Fe
r
)
1
i
∞
→
µ
Fe
2
i
1
w
S
2
w
δ
l
S
S
∞
→
µ
Fe
δ
l
δ
l
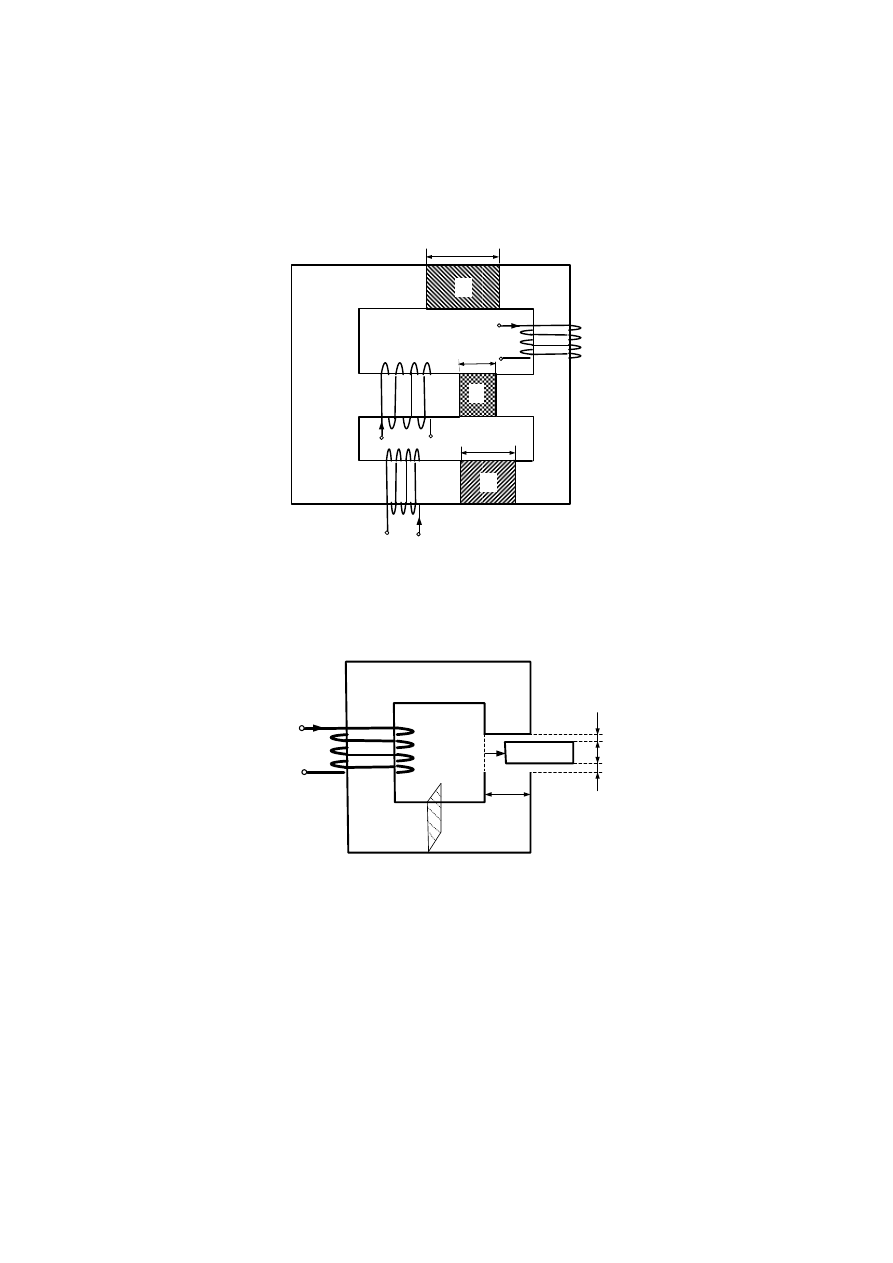
D.8
Wyznaczyć indukcyjności własne i wzajemne cewek nawiniętych na żelaznym rdzeniu (zgodnie z
poniższym rysunkiem) o nieskończenie dużej przenikalności magnetycznej (
∞
→
µ
Fe
r
) w którym
znajdują się trzy szczeliny o przekrojach
3
2
1
S
,
S
,
S
oraz długościach
3
2
1
l
,
l
,
l
wypełnione materiałami
o różnych przenikalnościach magnetycznych
3
2
1
,
,
µ
µ
µ
.
1
i
∞
→
µ
Fe
r
∞
→
µ
Fe
r
2
i
1
w
2
w
1
µ
2
µ
3
µ
1
l
2
l
3
l
1
S
2
S
3
S
3
i
3
w
D.9
Wyznaczyć funkcję indukcyjność cewki od położenia
x ruchomego rdzenia, jeżeli cewka nawinięta
jest (zgodnie z poniższym rysunkiem) na stalowym rdzeniu o nieskończonej przewodności
magnetycznej (
∞
→
µ
Fe
r
).
i
δ
l
2
d
S
=
h
d
x
δ
l
0
µ
>>
µ
Fe
0
µ
>>
µ
Fe
w
Wyszukiwarka
Podobne podstrony:
1- Uzupełnienie wiadomości o obwodach
Orkiestry dęte, symfoniczne. Postać Ludwika van Beethovena, Uzupełnienie wiadomości o Orkiestrach Dę
Krótkie uzupełnienie wiadomości o ocenie opisowej, pedagogika wczesnoszkolna(1)
chemia uzupełnienie wiadomości
RE i ETPC wiadomosci ogolne
Leczenie uzupełniające nowotworów narządu rodnego chemioterapia, radioterapia
I Spedycja wiadomosci podstawowe
08 Stany nieustalone w obwodach RLCid 7512 ppt
Wałki uzupełnienie
Uzupełnienia
TEST UZUPEŁNIANIA ZDAŃ
Wiadomosci ogolne
Printing bbjorgos lekcja41 uzupelnienie A
podstawowe wiadomosci (1)
Podstawowe wiadomosci o programie SciLab wykresy
więcej podobnych podstron