
Infrastruktura transportu II
DIAGNOSTYKA NAWIERZCHNI
DROGOWYCH I LOTNISKOWYCH

Czy można dzisiaj budować dobre drogi bez ich właściwej
diagnostyki? Bądź jeszcze bardziej stanowczo: po co wydawać
pieniądze na diagnostykę, jeśli wiadomo, że i tak jest źle? Takie
pytania pojawiają się co jakiś czas w ogólnonarodowej debacie na
temat polskich dróg.
Pytania na pierwszy „rzut oka” jak najbardziej sensowne, zważywszy
na ciągły deficyt środków finansowych na budowę nowych dróg, a
także na remonty tych mocno zdewastowanych.
Nasze drogi są „chore”, ale nie ma na nie jednego panaceum by je
„uzdrowić”, no chyba żebyśmy mieli nadmiar pieniędzy, ale i w
takiej sytuacji taniej jest zrobić diagnostykę.

Nawierzchnia drogowa charakteryzuje się specyficznymi
warunkami pracy i zużywania się, dlatego też jej diagnostyka
posługuje się równie specyficznymi metodami i środkami.
W tym przypadku jej zadania obejmują:
- diagnozę – określenie bieżącego stanu,
- genezę – określenie przyczyn powstawania aktualnego
stanu,
- prognozę – określenie czasu przyszłej zmiany stanu
nawierzchni

Dla celów diagnostyki wydziela się pojęcia: diagnostyki całej
konstrukcji nawierzchni oraz nawierzchni górnej warstwy
nawierzchni narażonej bezpośrednio na oddziaływania kół
pojazdów.
Celem diagnostyki jest określenie stanu technicznego warstw
powierzchniowych nawierzchni za pomocą obiektywnych
metod oraz ustalenie środków podwyższających trwałość,
efektywność i niezawodność użytkową.

Diagnostyka nawierzchni drogowych jest jak najbardziej
potrzebna i to przede wszystkim ze względu na właściwe
prowadzenie polityki finansowej.
To właśnie badania diagnostyczne dają podstawową
podpowiedź administracji drogowej jaki powinien być zakres
remontu i kiedy należy go wykonać.

Badania diagnostyczne nawierzchni są niezbędne:
- projektowaniu wzmocnień i remontów nawierzchni drogowych i
lotniskowych (takie dobieranie cech warstwy, aby umożliwić jak
najwyższy stopień bezpieczeństwa, wygody i ekonomiki jazdy,
- badaniach jakości wykonania nowych i modernizowanych dróg
(diagnostyka kontrolna, badanie warstwy ścieralnej),
- zbieraniu danych do systemów oceny stanu nawierzchni
(diagnostyka eksploatacyjna, badanie warstwy ścieralnej w czasie
użytkowania).
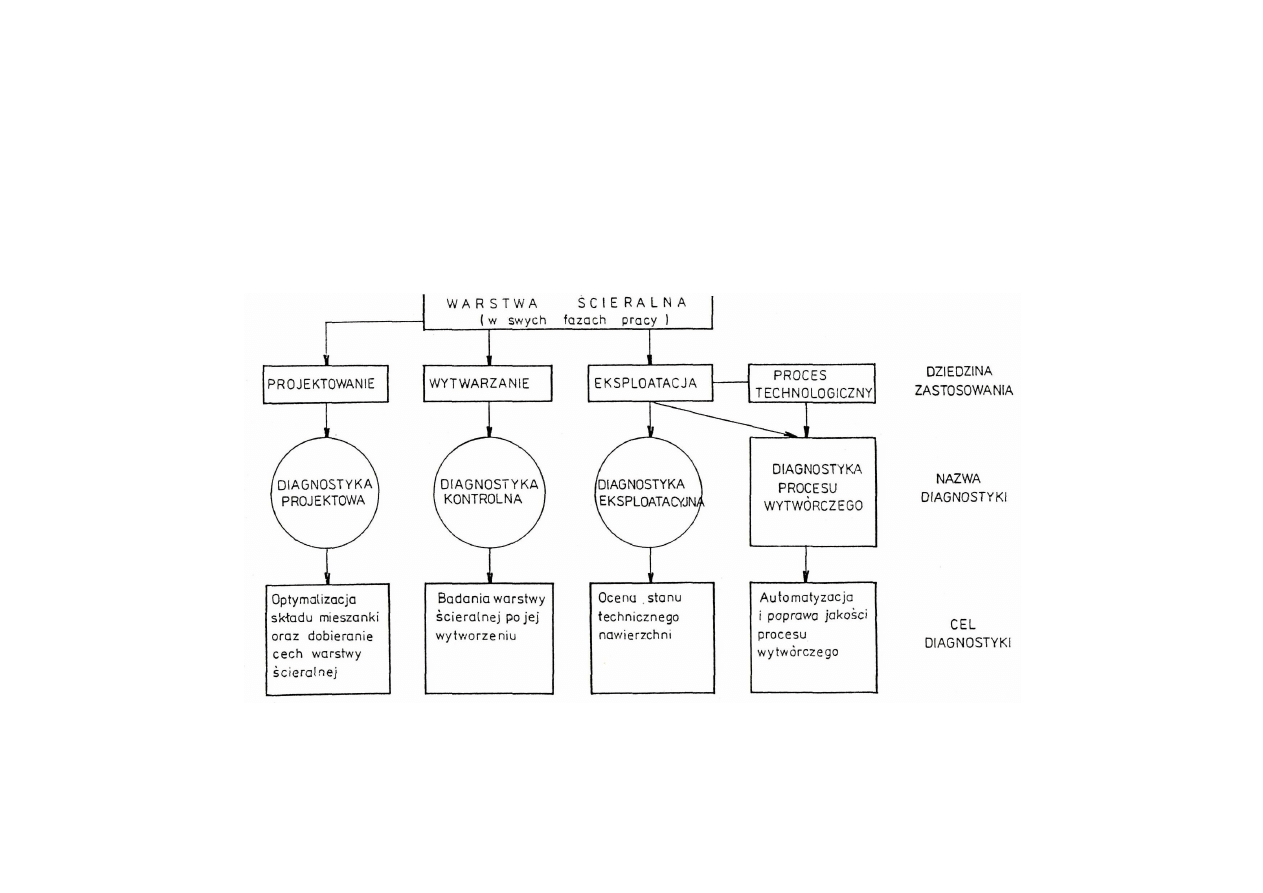
Syntetyczne ujęcie poszczególnych rodzajów diagnostyki
warstwy ścieralnej
Do podstawowych badań diagnostycznych nawierzchni
drogowej zaliczamy:
Pomiar ugięć nawierzchni, czyli zdolność nawierzchni do
przenoszenia obciążeń od pojazdów. Obecnie ma to
szczególne znaczenie, gdyż jesteśmy w trakcie procesu
dostosowywania głównych ciągów tranzytowych
(ok. 3000 km dróg) do wymagań unijnych w tym zakresie.
A te wymagania nakładają na Polskę zobowiązanie
dostosowania do roku 2010 nośności tych dróg do
przenoszenia obciążenia równoważnego 115 kN na oś
pojazdu.
Do podstawowych badań diagnostycznych nawierzchni drogowej
zaliczamy:
• Badanie współczynnika tarcia koła pojazdu samochodowego z
powierzchnią nawierzchni. Badania takie wykonywane są co roku na
głównych drogach krajowych.
• Badanie cech geometrycznych nawierzchni takich jak równość podłużna
i poprzeczna (głębokość kolein) nawierzchni. Cecha bardzo istotna w
ocenie stanu nawierzchni, a często najważniejsza przy podjęciu decyzji o
remoncie.
• Badanie grubości konstrukcji nawierzchni i jej stanu. Układy
konstrukcyjne na naszych drogach, i jest to pewna zaszłość historyczna, są
często nietypowe. Dlatego też bardzo istotne jest rozpoznanie rzeczywistej
konstrukcji przed podjęciem decyzji np. o zakresie jej remontu.
Pomiar ugięć nawierzchni drogowych i lotniskowych
Pomiar ugięć nawierzchni ugięciomierzem dynamicznym jest
najważniejszym badaniem służącym do projektowania wzmocnienia
nawierzchni drogowych. Pozwala ono na określenie pozostałej trwałości
konstrukcji drogowej, która jest przewidziana do modernizacji.
Na tej podstawie oraz w oparciu o prognozowaną wielkość ruchu
drogowego określa się wielkość (grubość) wzmocnienia oraz technologię
jego wykonania. W większości krajów ugięciomierz dynamiczny FWD
(Falling Weight Deflectometer) staje się lub jest najbardziej powszechnie
stosowanym urządzeniem do oceny nośności.
Oceniane są zarówno w trakcie budowy, jak i po wykonaniu, różne typy
nawierzchni, najczęściej dróg i lotnisk, a także dużych powierzchni
przemysłowych

Stosuje się różne metody pomiarów ugięć, które zaliczane są do grupy tzw. badań
nieniszczących NDT (Non Destructive Testing). Wykorzystywane w tych metodach
urządzenia można podzielić na sześć kategorii:
• pomiar ugięć od obciążeń statycznych – Belka Benkelmana,
• pomiar ugięć za pomocą belki zautomatyzowanej – Lacroix,
• pomiar ugięć od obciążeń dynamicznych – Curviameter,
• pomiar ugięć od obciążeń harmonicznych – Road Rater,
• pomiar ugięć od obciążeń udarowych – FWD (Falling Weight
Deflectometer), HWD (Heavy Weight Deflectometer).
• pomiar propagacji fali – SPA (Seismic Pavement Analizer).
Ugięciomierze udarowe to w ostatnich latach urządzenia
najczęściej stosowane w ocenie nośności nawierzchni.
Aparaty wykorzystywane są w pomiarach na różnych
typach nawierzchni, najczęściej dróg i lotnisk oraz do oceny
dużych powierzchni przemys
ł
owych.
Urządzenia te można podzielić na dwie grupy: FWD -
symulujące nacisk do 120 kN i stosowane g
ł
ównie na
drogach oraz HWD (Heavy Weight Deflectometer) - „nieco”
cięższa odmiana zwyk
ł
ych ugięciomierzy, symulujące
nacisk nawet do 250 kN stosowane są jedynie do oceny
nawierzchni lotnisk.
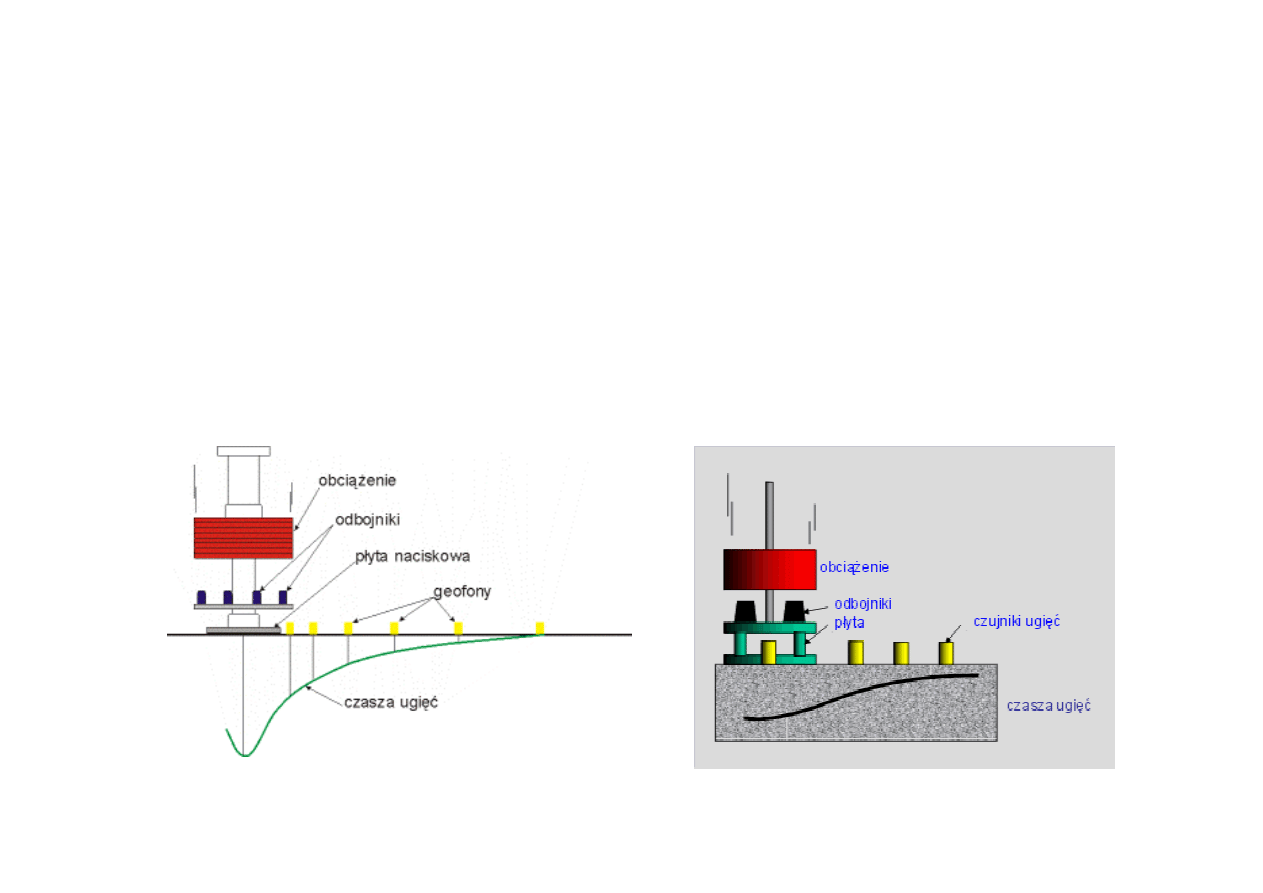
FWD wywo
ł
uje obciążenie przez zrzucenie ciężaru na uk
ł
ad t
ł
umiący zamontowany na p
ł
ycie
naciskowej. Elementy systemu takie jak ciężar, uk
ł
ad t
ł
umiący oraz wysokość zrzutu mogą być
każdorazowo zmieniane w celu uzyskania za
ł
ożonego obciążenia. Wartości ugięć mierzone są przez
czujniki w centrum obciążenia oraz w kilku ustalonych od punktu obciążenia odleg
ł
ościach.
Normalnie rejestrowane są podczas pomiarów jedynie maksymalne wartości obciążeń i ugięć.
W zależności od typu nawierzchni, przyjętych w metod projektowania lub dla celów badawczych
stosowane są różne wielkości obciążeń. Dla dróg najczęściej symulowane jest obciążenie o wartości
50
±
5kN co odpowiada naciskowi ko
ł
a bliźniaczego osi 100 kN.
Czujniki ugięć
W zależności od marki FWD stosowane są trzy rodzaje czujników ugięć: geofony,
akcelerometry oraz sejsmometry. W większości produkowanych obecnie urządzeń
stosowane są geofony.
Płyta naciskowa
Płyta naciskowa słu
ż
y do przekazania impulsu
obci
ąż
enia na nawierzchni
ę
. W zale
ż
no
ś
ci od typu
nawierzchni, przyj
ę
tych metod projektowania lub dla
celów badawczych stosowane s
ą
płyty ró
ż
ni
ą
ce si
ę
budowa i wielko
ś
ci
ą
.
Do pomiaru ugi
ęć
nawierzchni asfaltowych
wykorzystuje si
ę
płyty stalowe o
ś
rednicy 300 mm
z poduszk
ą
gumow
ą
grubo
ś
ci min. 5mm, która
stosowana jest w celu zapewnienia dobrego kontaktu
płyty z nawierzchni
ą
.
Niektóre z urz
ą
dze
ń
wyposa
ż
one s
ą
w płyty z
odpowiednio dobranego polichlorku winylu o grubo
ś
ci
20 mm bez poduszki, w innych stosowane s
ą
tzw.
płyty segmentowe, podzielone na dwie lub cztery
cz
ęś
ci z poduszk
ą
gumow
ą
grubo
ś
ci do 20 mm.

Ugięciomierz FWD jest jednym z tych urządzeń, które pozwalają
inżynierowi opisać i zrozumieć strukturalne zachowanie nawierzchni.
Wyniki pomiarów muszą być tak przetworzone, aby mog
ł
y być
wykorzystane w procesie oceny stanu nawierzchni.
Przed przystąpieniem do pomiarów ugięć należy określić cechy
powierzchniowe nawierzchni (ocena wizualna, pomiar g
ł
ę
bokości kolein
itp.), prawdopodobne przyczyny zaobserwowanych uszkodzeń oraz
konstrukcję nawierzchni, wykorzystując przy tym klasyczne jak
i nowoczesne metody pomiaru np. Pentoradar.
Mając te dodatkowe ale ważne informacje można podjąć decyzję o tym czy
i w jaki sposób przeprowadzić pomiary ugięć nawierzchni.

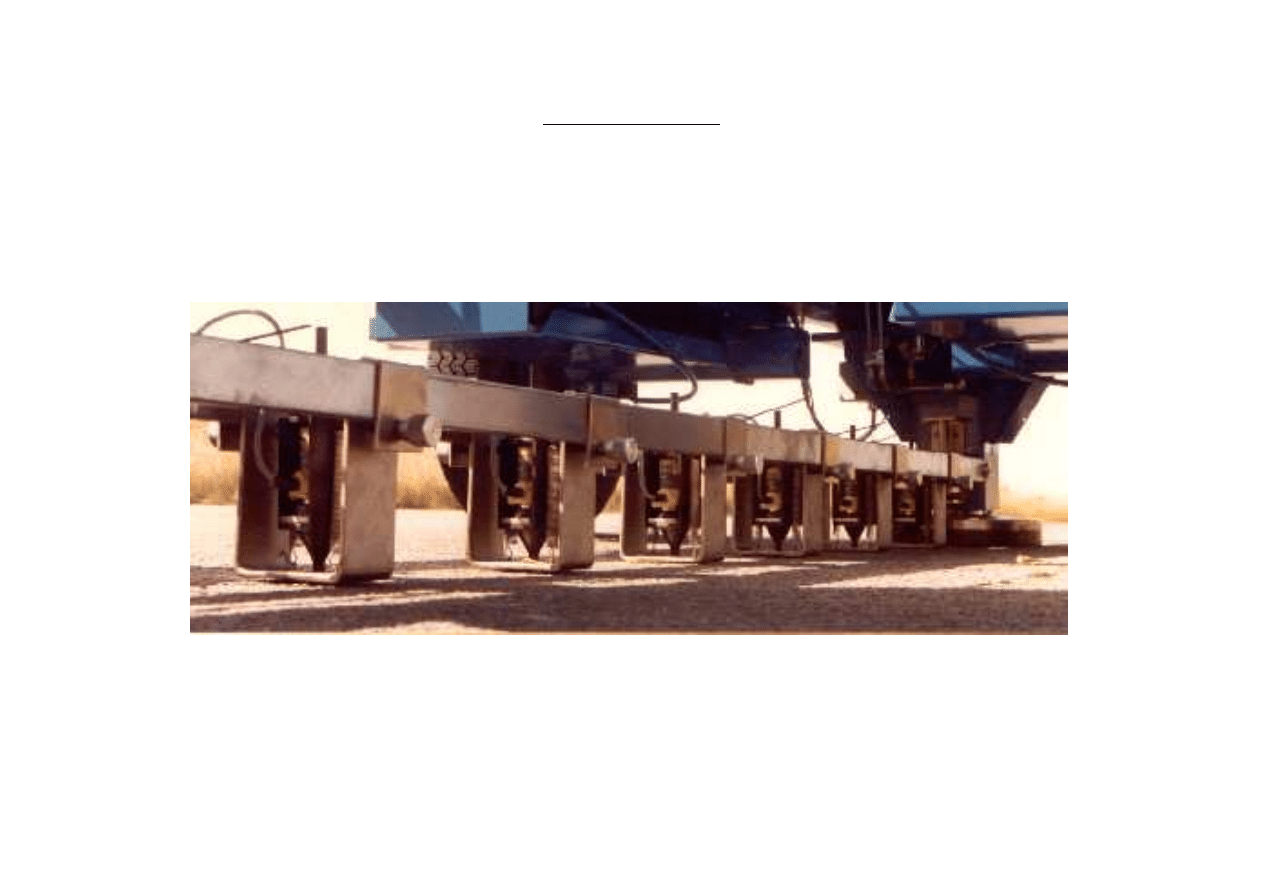
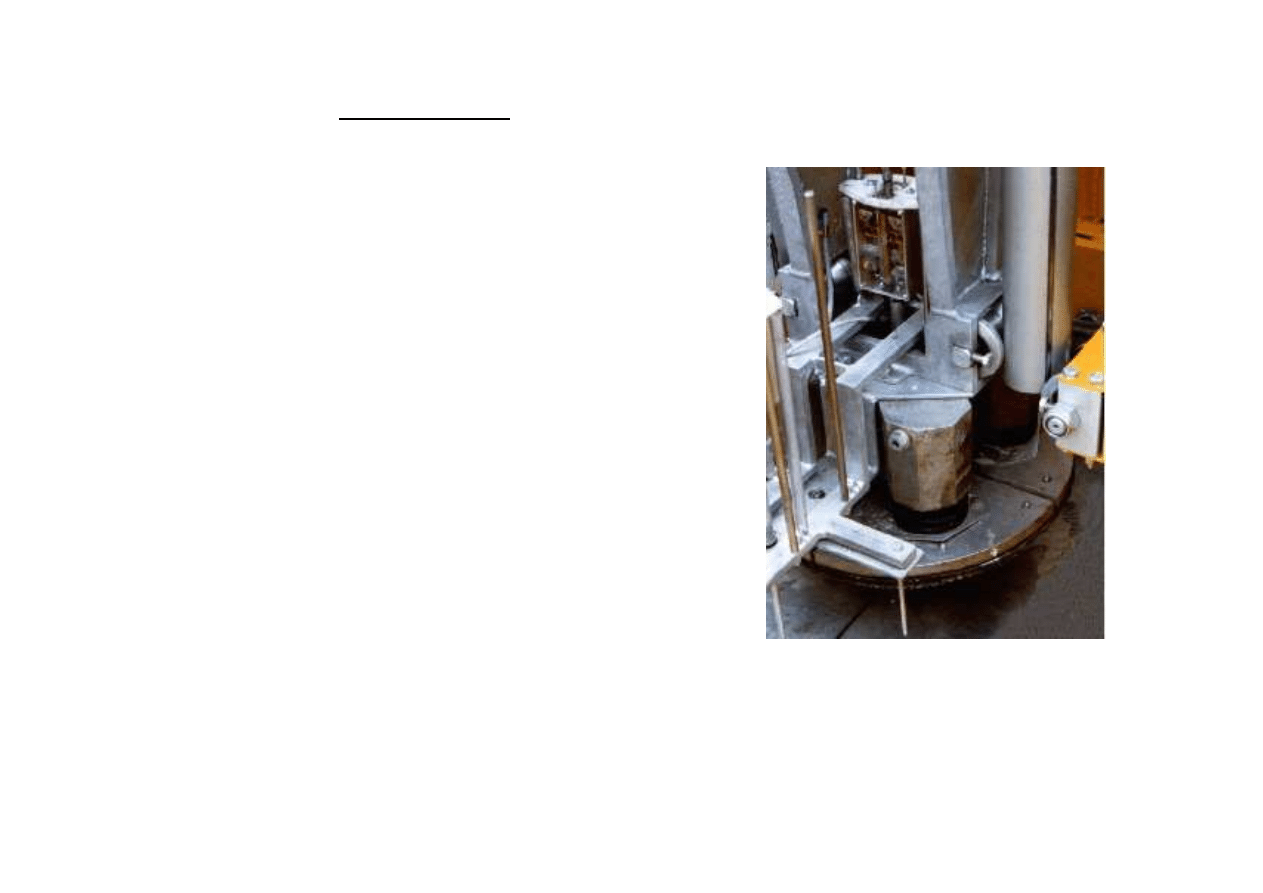
Zestaw FWD i HWD
Metody radarowe oceny konstrukcji nawierzchni
Radar przypowierzchniowy i podpowierzchniowy wysyła falę
elektromagnetyczną w głąb konstrukcji nawierzchni za
pomocą anteny zainstalowanej na pojeździe badawczym lub
przenośnym. Wyemitowane promieniowanie odbijane jest z
powrotem do anteny.

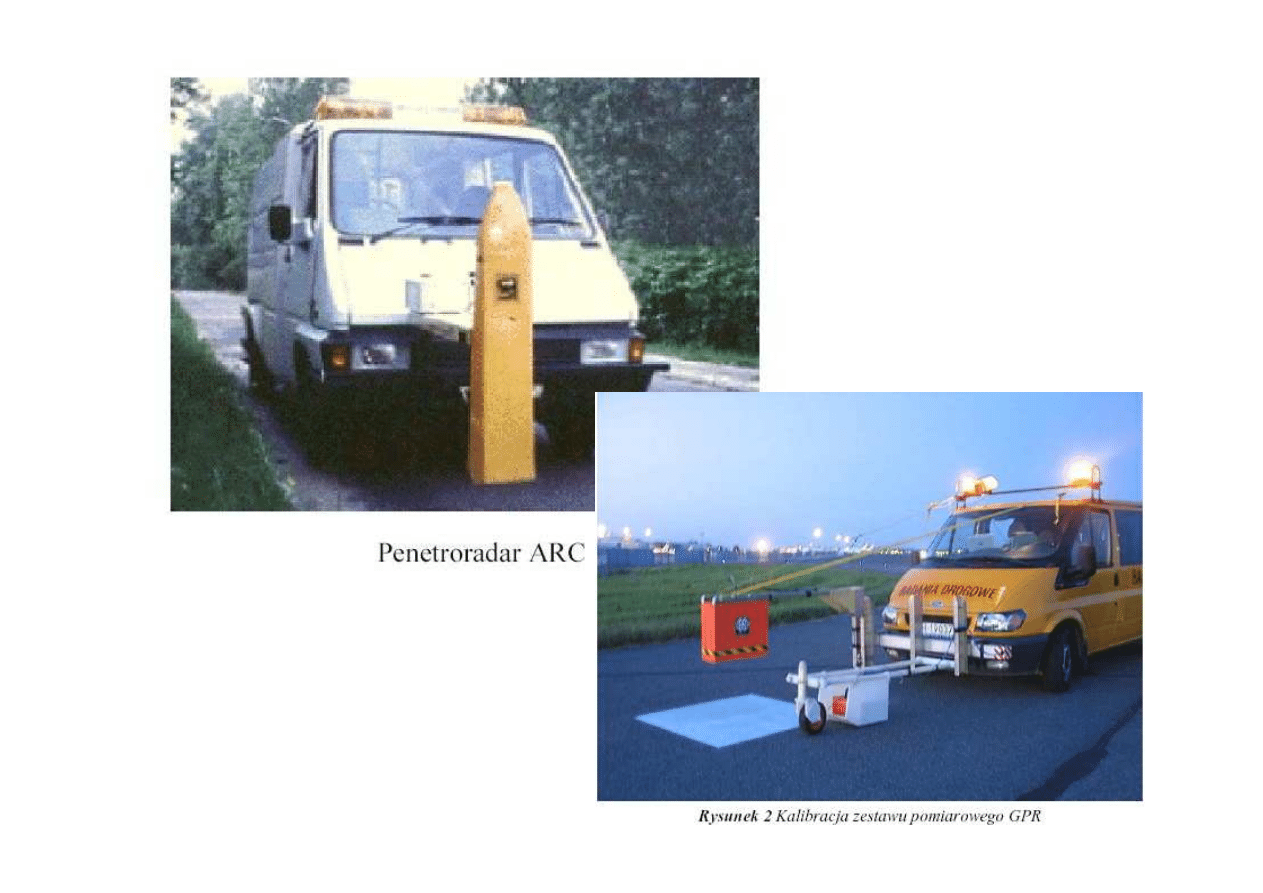
Do metod symulacyjnych można również zaliczyć
penetroradar ARC. System generuje impulsy fali
elektromegnetycznej emitowane przez antenę, która
jednocześnie odbiera sygnały odbite od granic między
warstwami o różnych właściwościach elektromagnetycznych.
Dane przekazywane są do zespołu kontroli radaru i
wyświetlane na monitorze komputera w formie wykresu
kolejnych sygnałów, w zależności od przebytego dystansu
System ARC daje ciągłą informację o rodzaju konstrukcji
nawierzchni, grubościach poszczególnych warstw, odcinkach
jednorodnych oraz o występujących zmiennościach
i anomaliach.

Wykorzystanie GPR pentroradaru – do analizy konstrukcji
nawierzchni
Zastosowanie technik radarowych do rozpoznania konstrukcji
nawierzchni drogowych ma już swoją historię. Tradycyjne metody
czyli odwierty mają swoje bezsprzeczne zalety, ale mają też wady.
Oprócz wysokiego kosztu wykonania jednego odwiertu do wad tej
techniki można zaliczyć czasoch
ł
onność wykonania oraz ograniczona
ilość informacji jaką dostarcza jeden odwiert.
Odwierty sprawdzają się przede wszystkim na krótkich odcinkach lub
gdy potrzebne są informacje o konstrukcji nawierzchni dotyczące
konkretnego miejsca na drodze. W przypadkach d
ł
ugich odcinków,
gdy niezbędne są dane o nawierzchni na ca
ł
ym odcinku (w sposób
ciąg
ł
y) bardzo pomocne staje się wykorzystanie GPR.

GPR jest ważnym uzupe
ł
nieniem klasycznych metod
rozpoznania konstrukcji nawierzchni, co więcej, pozwala na
uzyskanie dodatkowych informacji o drodze i jej stanie. Równie
ważne jest stwierdzenie, że zastosowanie GPR nie powinno
wykluczać wykonania odwiertów – technologie te powinny się
uzupe
ł
niać.
Podstawowe zalety GPR:
- ci
ą
gło
ść
pomiaru na całym odcinku
- szybko
ść
pomiaru
- bezpiecze
ń
stwo wykonywania pomiaru
- dodatkowe informacje o stanie nawierzchni

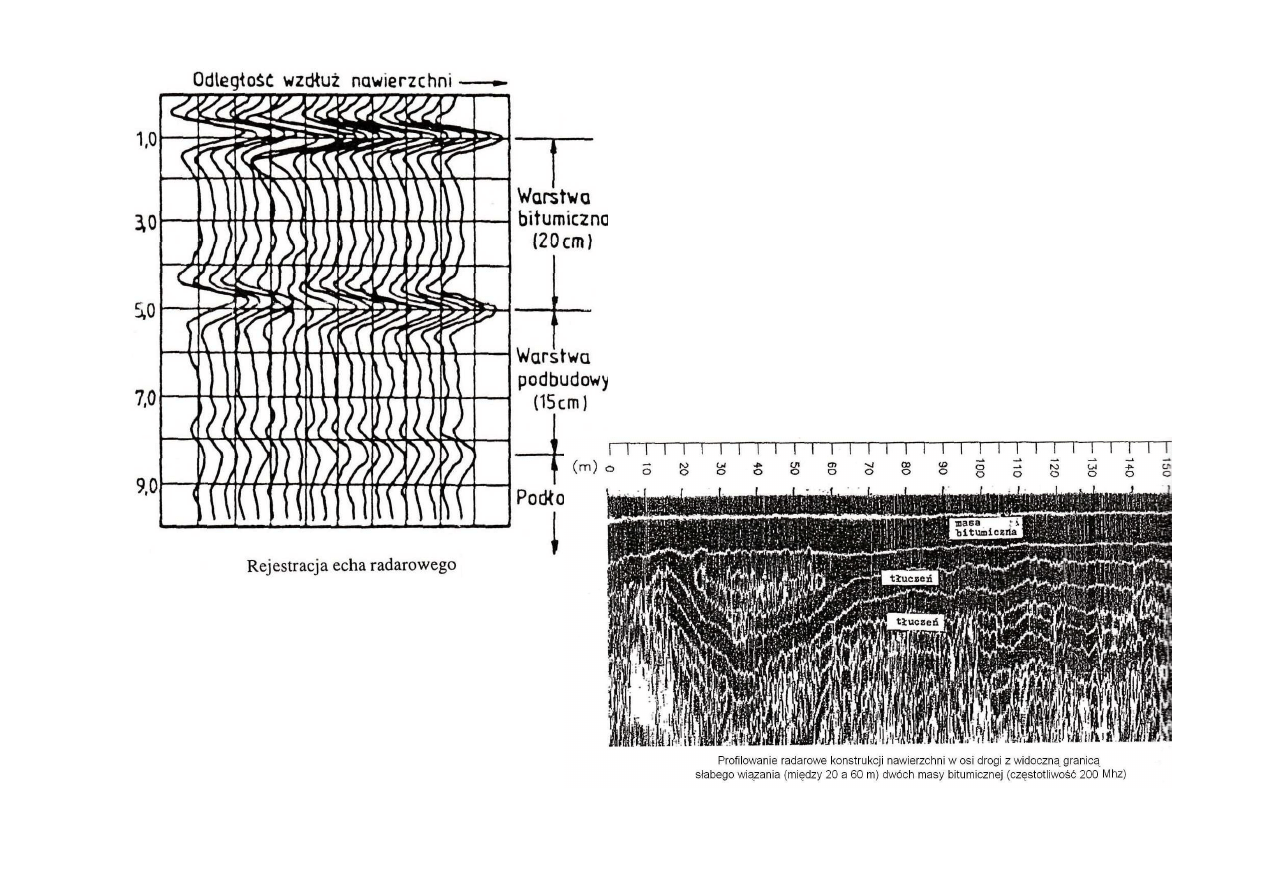
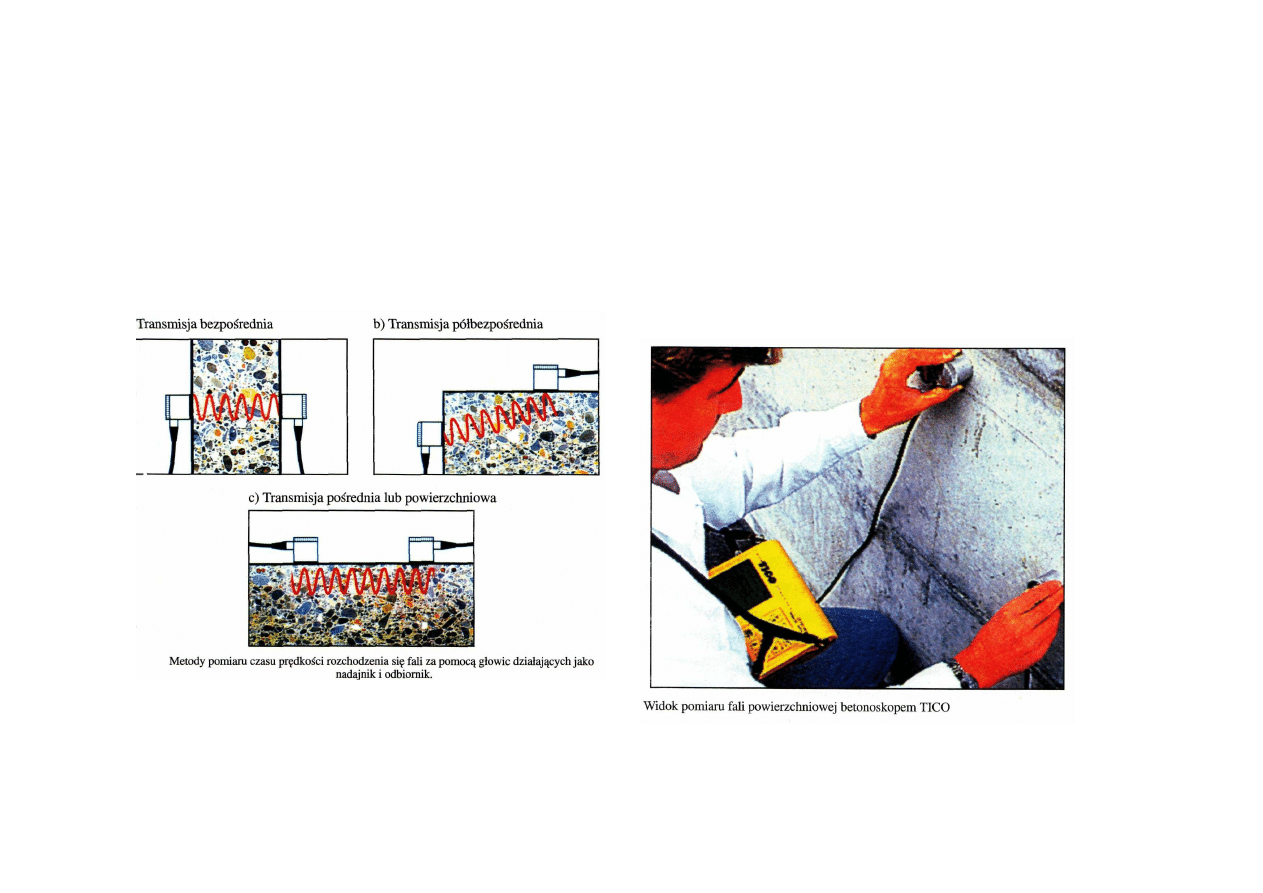
Zasada pomiaru radarowego polega na
analizie odbicia fal wysyłanych w kierunku
nawierzchni.
Poniewa
ż
pr
ę
dko
ść
rozchodzenia si
ę
fal w
ró
ż
nych o
ś
rodkach (np. beton asfaltowy,
piasek itp.) jest ró
ż
na, znaj
ą
c charakterystyki
fizyczne ró
ż
nych materiałów i pr
ę
dko
ś
ci fal
mo
ż
na okre
ś
li
ć
grubo
ś
ci warstw od których
nast
ę
puje odbicie sygnału.
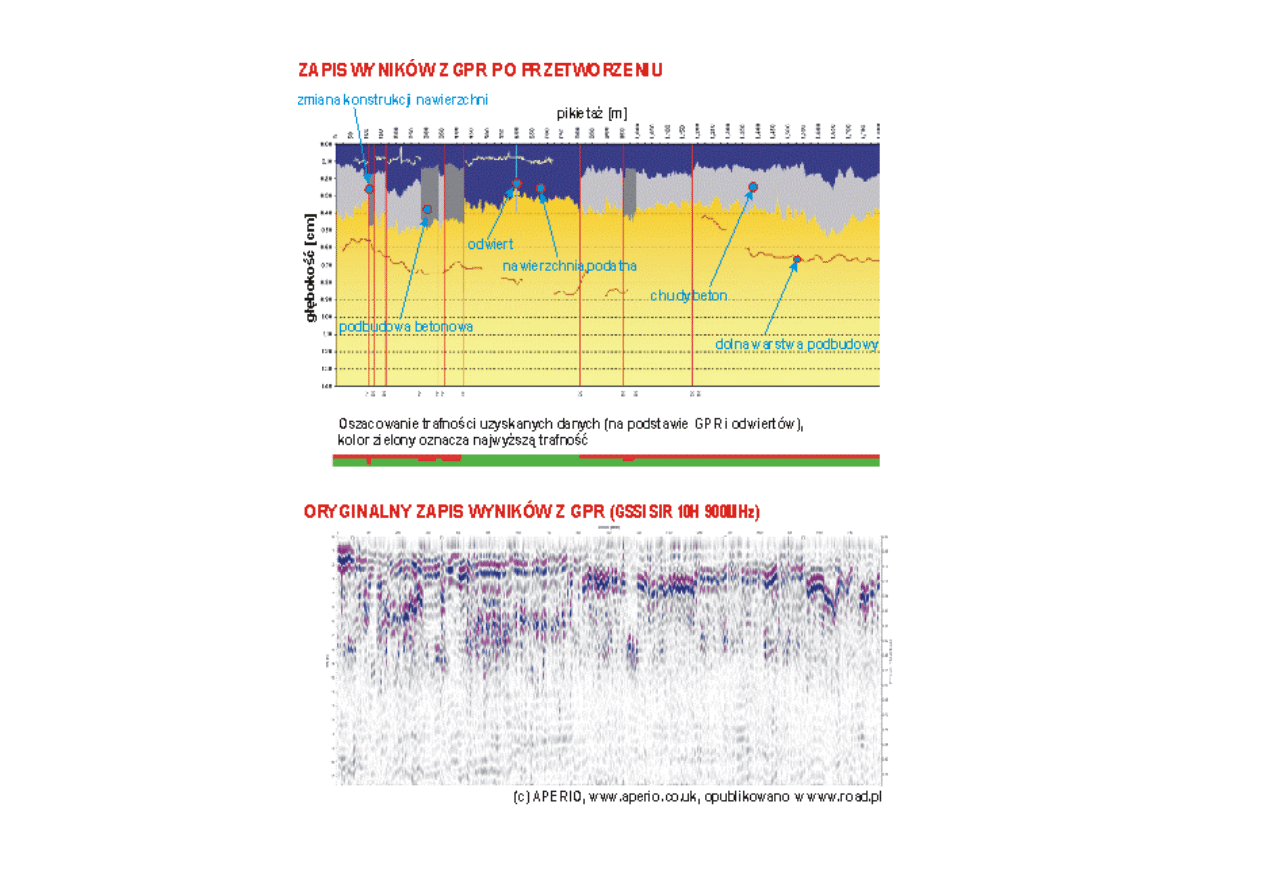
Pomiar dokonywany jest przez pojazd
wyposa
ż
ony w cyfrowy system GPR, zwykle
z kilkoma rodzajami anten radarowych.

Dokładno
ść
pomiaru cech nawierzchni zale
ż
y
od cz
ę
stotliwo
ś
ci próbkowania systemu, która
jest kontrolowana przez cz
ę
stotliwo
ść
radaru
(anten
ę
) i pr
ę
dko
ść
pojazdu. Przy pr
ę
dko
ś
ci 80
km/h typowa cz
ę
stotliwo
ść
próbkowania wynosi
jeden impuls co 0.5 m, a wi
ę
c elementy o
wielko
ś
ci mniejszej ni
ż
0.5 m mog
ą
zosta
ć
„zgubione". Powierzchnia analizowana przez
radar zale
ż
y od konfiguracji anteny i zwykle
wynosi około 300 mm (długo
ść
) na gł
ę
boko
ś
ci
300 mm.
Do poprawnej interpretacji wyników niezb
ę
dne
jest wykonanie odwiertów kalibruj
ą
cych,
okre
ś
laj
ą
cych rodzaj materiału w nawierzchni
oraz kalibruj
ą
cych pr
ę
dko
ść
impulsu fali
radiowej. Dla kalibrowania zwykle wykonuje si
ę
odwiert co 10 km na drogach zamiejskich i 5 km
na drogach miejskich. Optymalne poło
ż
enie
miejsc do wykonania odwiertów lokalizowane
jest po wst
ę
pnej obróbce danych.
rys. 3

Penetroradar – wspomaganie zarz
ą
dzania
sieci
ą
drogow
ą
Dane na poziomie zarz
ą
dzanej sieci drogowej
zawieraj
ą
zwykle informacje z:
- wizualnej oceny stanu,
- równo
ś
ci poprzecznej,
- równo
ś
ci podłu
ż
nej,
- współczynnika tarcia,
- ugi
ęć
Wykorzystywane s
ą
do planowania bud
ż
etów,
ustalania kolejno
ś
ci remontowania (wyboru
odcinków).
Na podstawie zebranych informacji
zarz
ą
dzaj
ą
cy jest w stanie okre
ś
li
ć
strategi
ę
utrzymania sieci na najbli
ż
szy okres oraz plan
wieloletni.

Penetroradar – do przygotowania remontu drogi
Przygotowanie projektu remontu drogi wymaga posiadania zestawu
danych, dzi
ę
ki którym in
ż
ynier technolog nawierzchni mo
ż
e przygotowa
ć
wła
ś
ciw
ą
koncepcj
ę
remontu.
Do takich danych nale
żą
:
- informacje o konstrukcji nawierzchni na całym odcinku,
- informacje o ugi
ę
ciach nawierzchni,
- informacja o stanie powierzchni,
- informacje o odkształceniach,
- informacje o cechach materiałowych poszczególnych warstw
nawierzchni,
- informacje o stanie podbudowy, rozwarstwieniach mi
ę
dzy warstwami
bitumicznymi itd.
Badanie współczynnika tarcia
Badanie współczynnika tarcia koła pojazdu
samochodowego z powierzchnią nawierzchni
przeprowadza się za pomocą urządzeń symulujących
hamowanie koła samochodu w trakcie jego ruchu po
jezdni przy określonych prędkościach. Na świecie
stosowanych jest kilkanaście takich urządzeń. W
Polsce, czym warto się pochwalić, mamy urządzenie
zbudowane według własnych: idei, metody i projektu
– jest to zestaw SRT-3
Przebieg momentu hamuj
ą
cego W(t), siły przyczepno
ś
ci F(t)
i pr
ę
dko
ś
ci k
ą
towej koła pomiarowego w
k
(t) w cyklu hamowania
przyczepy dynamometrycznej
Dzi
ę
ki oryginalnym rozwi
ą
zaniom SRT-3 posiada szereg zastosowa
ń
i mo
ż
liwo
ś
ci:
•
pomiar współczynnika przyczepno
ś
ci przy pełnej blokadzie koła pomiarowego
dwoma metodami, tj poprzez pomiar momentu hamuj
ą
cego i przez bezpo
ś
redni
pomiar siły przyczepno
ś
ci,
•
pomiar maksymalnej warto
ś
ci współczynnika przyczepno
ś
ci
(przy danej pr
ę
dko
ś
ci pomiarowej),
•
pomiar siły oporów toczenia,
•
pomiar współczynnika przyczepno
ś
ci na łukach,
•
pomiar siły w zawieszeniu przyczepy dynamometrycznej,
•
mo
ż
liwo
ść
okre
ś
lenia współczynnika przyczepno
ś
ci w funkcji po
ś
lizgu wzgl
ę
dnego.
Współczynnik przyczepno
ś
ci wzdłu
ż
nej w funkcji po
ś
lizgu wzgl
ę
dnego

Dane techniczne zestawu pomiarowego SRT-3
•
obci
ąż
enie nominalne koła pomiarowego - 2943 N (300 kG)
•
nominalna pr
ę
dko
ść
pomiarowa - 60 km/h
•
zakres pr
ę
dko
ś
ci pomiarowych - 30 - 120 km/h
•
opona pomiarowa: 185/70 R14 Barum Bravura (Continental) oraz
165 R15/PIARC-Vredestain gładka z obwodowymi rowkami (opona
wzorcowa)
•
masa całkowita - 370 kg
•
hydropneumatyczny system hamowania
•
pneumatyczny system wypływu wody
•
regulowany czas hamowania
•
regulowany czas u
ś
redniania mierzonych warto
ś
ci
Badanie cech geometrycznych nawierzchni
Obecnie powszechnie na całym świecie stosuje się do pomiarów cech
geometrycznych drogi urządzenia oparte na wykorzystaniu laserów zwane
profilografami laserowymi.
Profilograf laserowy jest urządzeniem umożliwiającym dokonywanie pomiarów
podstawowych parametrów dróg, takich jak:
• równość podłużna nawierzchni (określana zazwyczaj wskaźnikiem
IRI – International Roughness Index),
• równość poprzeczna nawierzchni (określana jako głębokość kolein),
• hipotetyczna głębokość filmu wodnego w koleinie,
• spadki podłużne drogi,
• spadki poprzeczne,
• promienie łuków poziomych drogi,
• tekstura nawierzchni.
Pomiar równości podłużnej
Do pomiaru równości podłużnej mogą być
stosowane przyrządy opisujące nierówności
powierzchni geometrycznej warstwy wierzchniej.
Urządzenie APL należy do grupy profilografów o
inercyjnej bazie pomiarowej, który rejestruje profil
podłużny o długościach mieszczących się w
przedziale od 0,5 m do 50 m.

Aparat APL do pomiaru równości podłużnej

Do pomiaru równości można również zastosować metodę
symulacyjną. Aktualnie jedno z najnowocześniejszych
urządzeń – profilometr laserowy rejestruje powierzchnie
geometryczną piętnastoma laserami mierzącymi odległość od
powierzchni geometrycznej warstwy wierzchniej.
Zamontowany wewnątrz belki układ inercyjny rejestruje
wszelkie jej ruchy. Na lewym tylnym kole zamontowano
czujnik licznika przejechanej odległości. W czasie pomiarów
dane z laserów, układu inercyjnego i licznika drogi
gromadzone są w komputerze i prezentowane graficznie w
czasie rzeczywistym.
Podstawowe dane techniczne i wymagania dla profilografu
:
• prędkość pomiarowa: do 100 km/h,
• krok pomiarowy (częstotliwość próbkowania) czujnika do tekstury:
<0,25 mm,
• zakres pomiarowy (względem ustalonej odległości czujnika tekstury
od drogi): I 32 mm,
• oprogramowanie umożliwiające m.in. wyznaczenie współczynnika
IRI (International Roughness Index),
• min. 7 czujników laserowych do pomiaru profilu poprzecznego drogi,
• parametry pomiarów równości poprzecznej i podłużnej zgodne z
normami europejskimi.

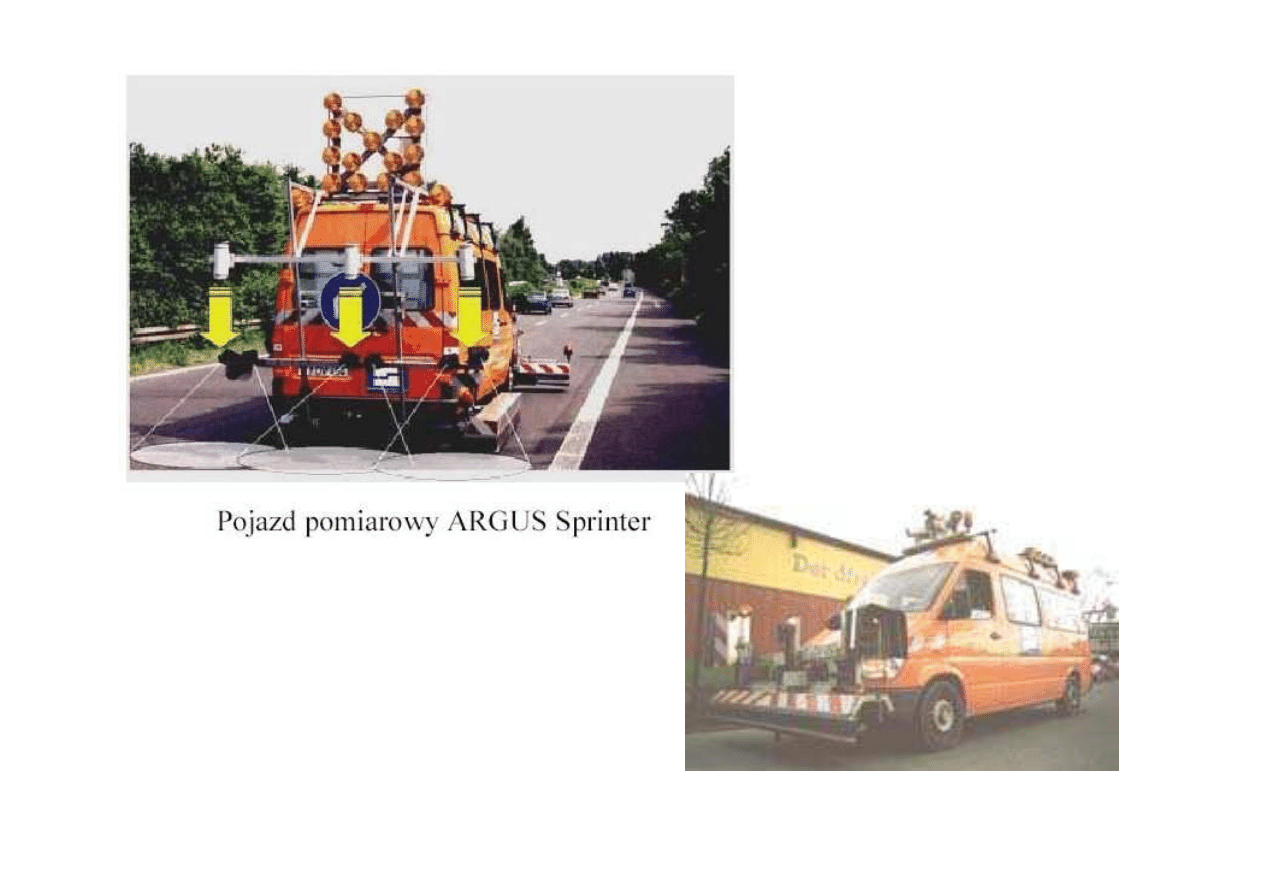
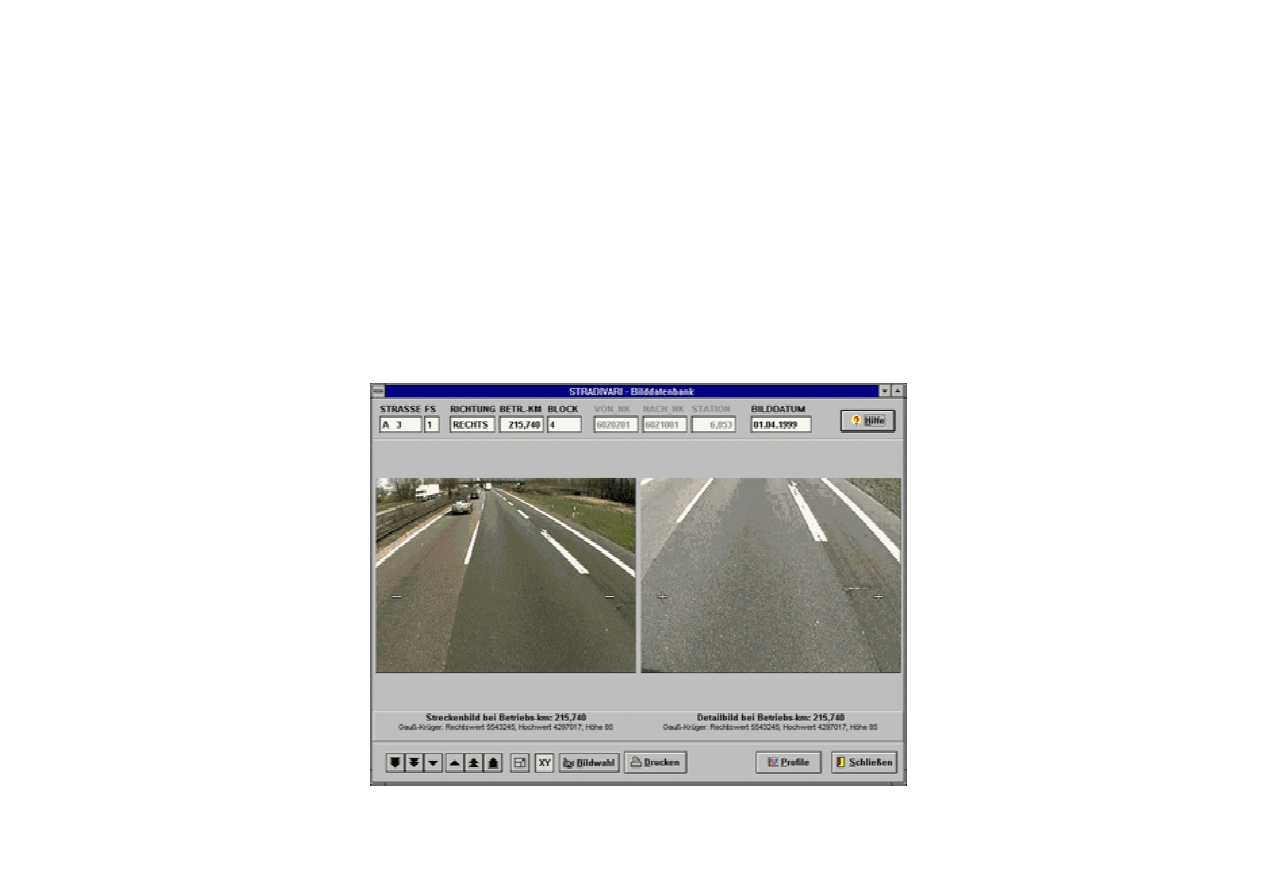
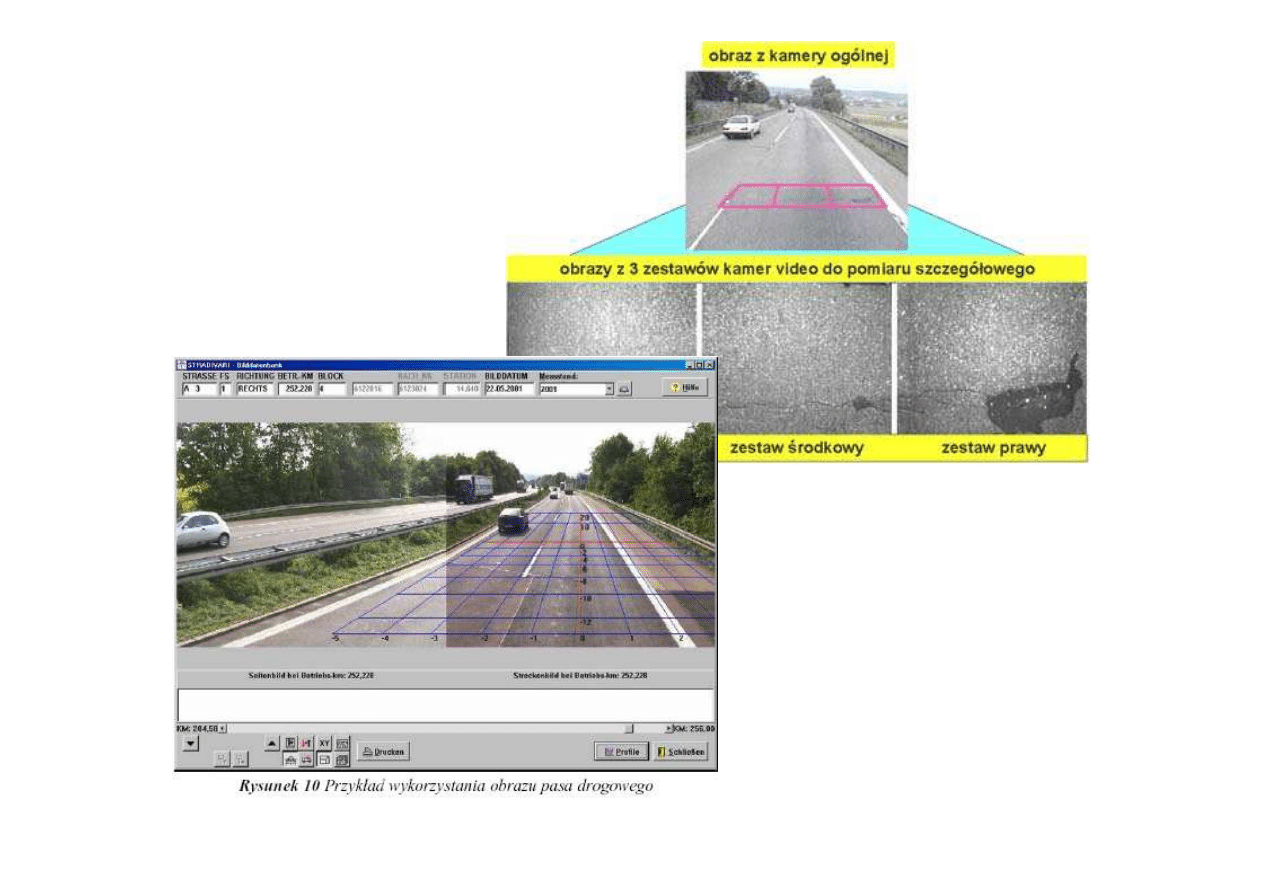
Kombajnem pomiarowym, pracującym w krajach
europejskich jest pojazd ARGUS pracujący na niemieckich
drogach. Pojazd pomiarowy dzięki 8 kamerom video
rejestruje: elementy pasa drogowego (3 kamery), a 5 kamer
video służy do rejestracji szczegółów stanu powierzchni
geometrycznej warstwy wierzchniej. Zastosowanie
sztucznego oświetlenia (lampy stroboskopowe) powoduje, że
mamy doskonałą jakość zdjęć video. Z przodu pojazdu na
belce zainstalowane są 33 czujniki laserowe mierzące
odległość między belką a powierzchnią geometryczną
warstwy wierzchniej.
Pr
ę
dko
ść
pomiarowa pojazdu wynosi do 100 km/h, wi
ę
c nie wprowadza on
wi
ę
kszych zakłóce
ń
w ruchu pojazdów na drodze. Pojazd ten wyposa
ż
ony jest w
1-3 kamer video do rejestracji ogólnej drogi i jej otoczenia oraz 3-5 kamer do
rejestracji szczegółów stanu nawierzchni. Oprócz zapisu video stanu powierzchni
pasa drogi ARGUS pozwala na pomiar:
•równo
ś
ci poprzecznej (koleiny),
•równo
ś
ci podłu
ż
nej,
•spadków nawierzchni.
Program do ogl
ą
dania zarejestrowanego przejazdu.

Pomiar uszkodze
ń
powierzchniowych
Pomiar uszkodze
ń
powierzchniowych takich jak p
ę
kni
ę
cia, łaty,
wyboje, przebitumowania odbywa si
ę
dzi
ę
ki zapisowi video z 3
kamer umieszczonych w tylnej cz
ęś
ci pojazdu ARGUS
Czarno-biały obraz odtwarzany z zapisu podczas sesji interpretacji zdj
ęć
pozwala na zlokalizowanie p
ę
kni
ęć
o szeroko
ś
ci rozwarcia powy
ż
ej 1 mm.
Uzyskanie tak du
ż
ej dokładno
ś
ci obrazu mo
ż
liwe jest dzi
ę
ki zastosowaniu
lamp stroboskopowych. Dodatkowo mo
ż
liwa jest półautomatyczna lokalizacja
p
ę
kni
ęć
zarejestrowanych na filmie.
Przykładowe uszkodzenie
widoczne na zapisie video - łata
i p
ę
kni
ę
cie powierzchni.

Pomiar równo
ś
ci poprzecznej (kolein)
Jednym z najpowszechniej wyst
ę
puj
ą
cych zniszcze
ń
nawierzchni bitumicznych s
ą
deformacje
przekroju poprzecznego (koleiny). Lokalizowanie wyst
ę
powania kolein o gł
ę
boko
ś
ci
przekraczaj
ą
cej warto
ś
ci krytyczne ma bardzo du
ż
e znaczenie z punktu widzenia
bezpiecze
ń
stwa u
ż
ytkownika drogi.
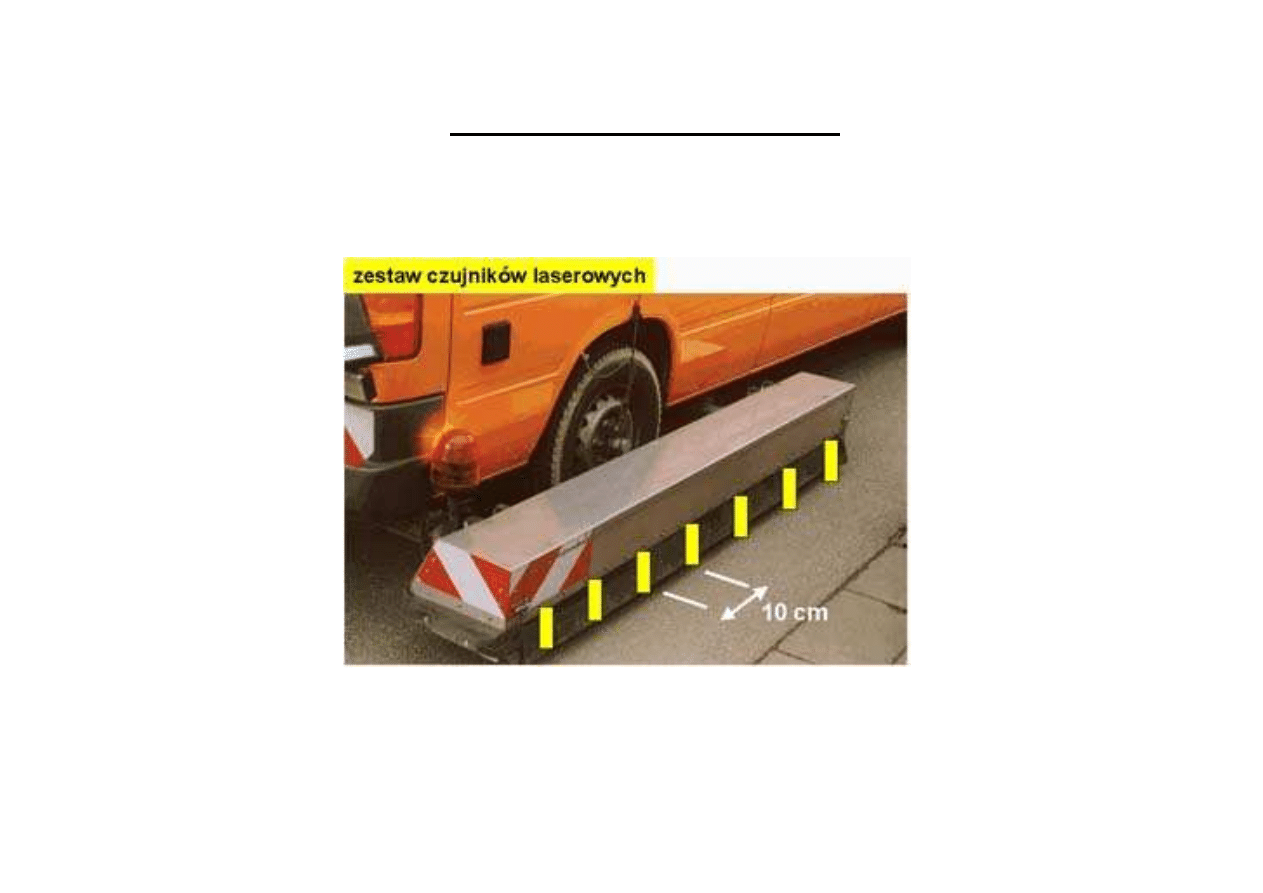
Pojazd ARGUS wyposa
ż
ony jest w belk
ę
poprzeczn
ą
zawieszon
ą
w przedniej cz
ęś
ci pojazdu.
Na belce zainstalowane s
ą
33 czujniki laserowe mierz
ą
ce odległo
ść
mi
ę
dzy belk
ą
a
nawierzchni
ą
.
Szeroko
ść
belki pomiarowej z czujnikami laserowymi jest regulowana i mo
ż
e wynosi
ć
2,5 lub
3,5 m. Pomiar wykonywany jest sekwencyjnie co 100 cm, uzyskuje si
ę
w ten sposób profil
poprzeczny powierzchni pasa ruchu
.
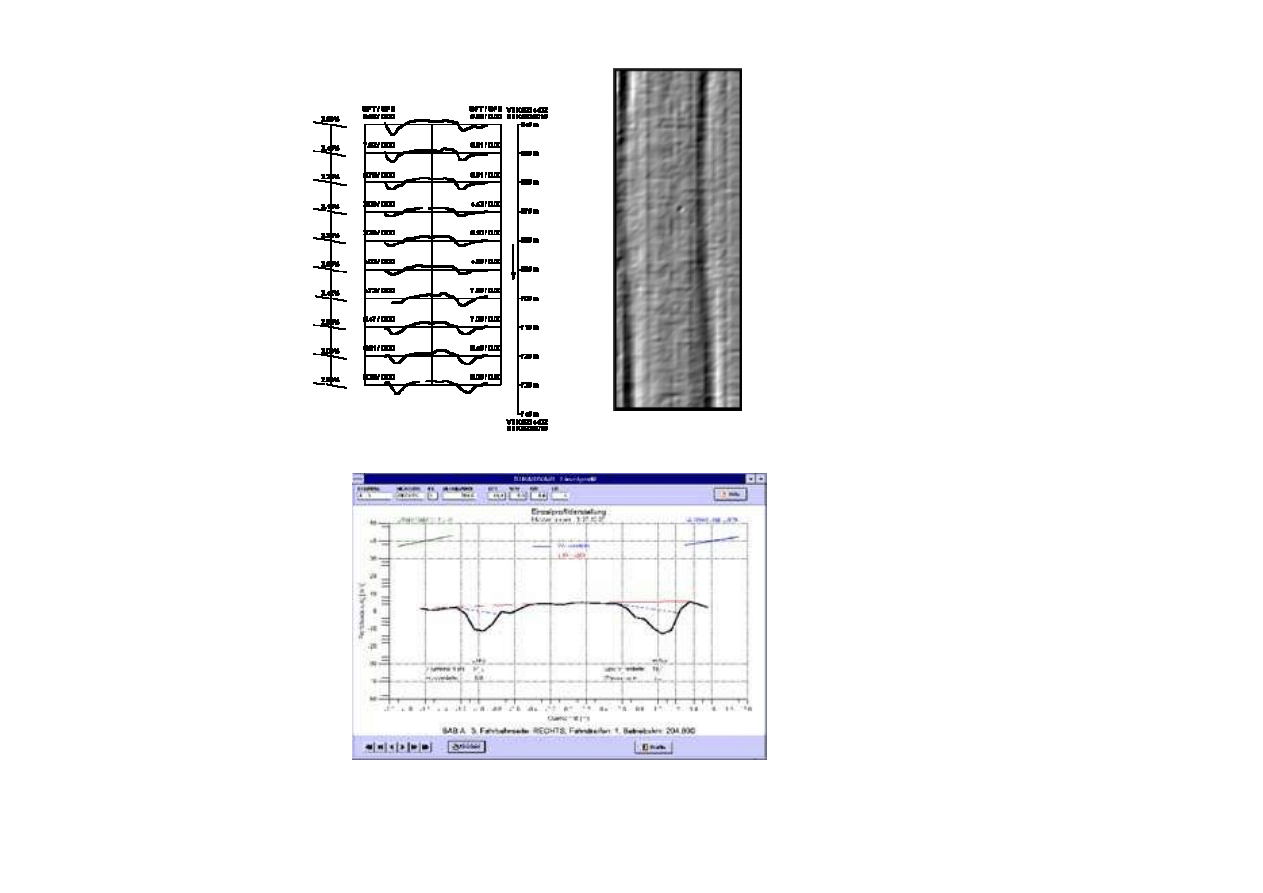
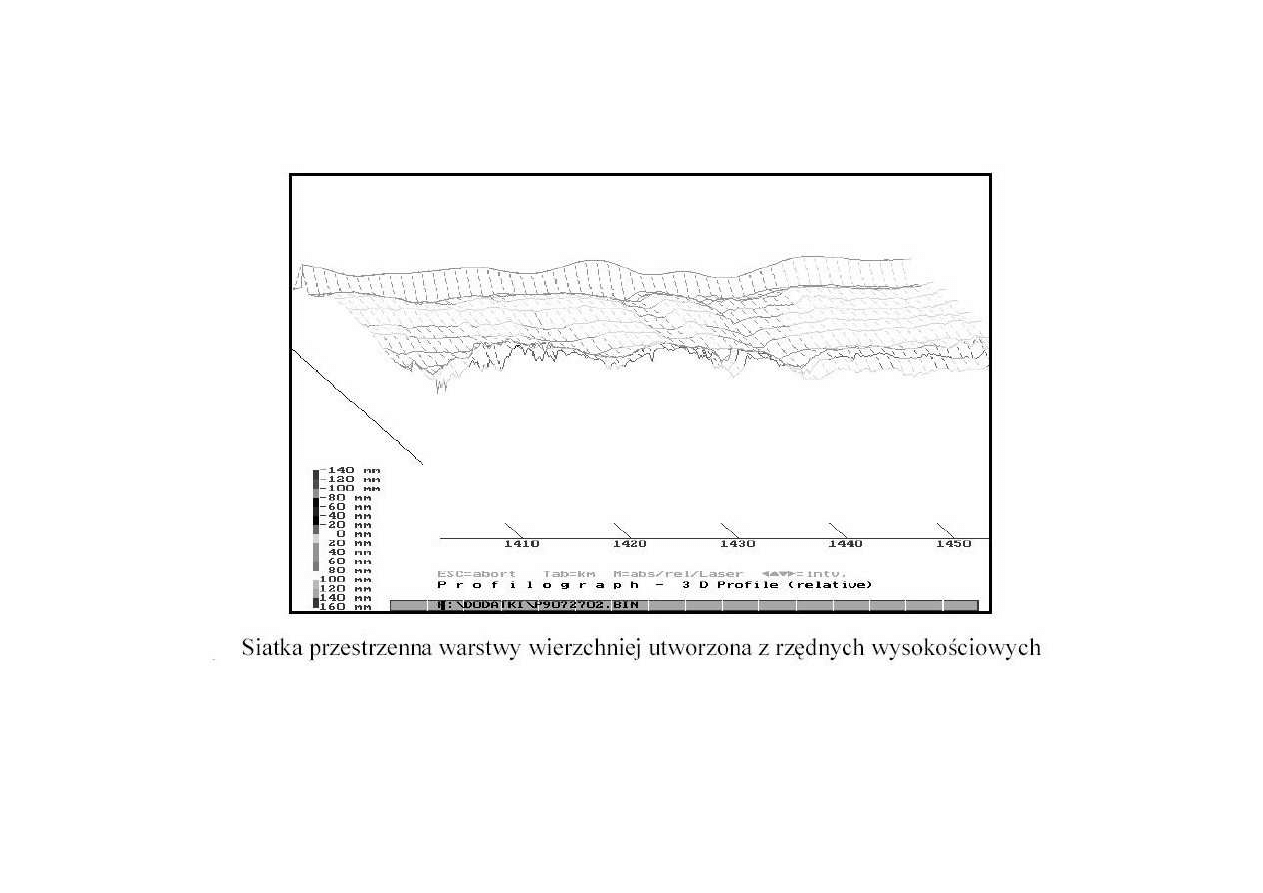
Wizualizacja poprzecznej nierówno
ś
ci nawierzchni w postaci na wykresów oraz cieniowanego rysunku
Na podstawie przeprowadzonego pomiaru gł
ę
boko
ś
ci kolein, oprogramowanie komputerowe pozwala
na obliczenie teoretycznej gł
ę
boko
ś
ci wody w koleinach.
Pomiar równo
ś
ci podłu
ż
nej
Parametr równo
ś
ci poprzecznej jest zwi
ą
zany głownie z komfortem
jazdy. Do jego pomiaru w poje
ź
dzie ARGUS wykorzystuje si
ę
tak
ż
e
zestaw czujników laserowych.
Belka z czujnikami laserowymi umieszczona po prawej stronie pojazdu ARGUS.
Ocena stanu nawierzchni z betonu cementowego metodą
ultradźwiękową

Pomiar gęstości nawierzchni

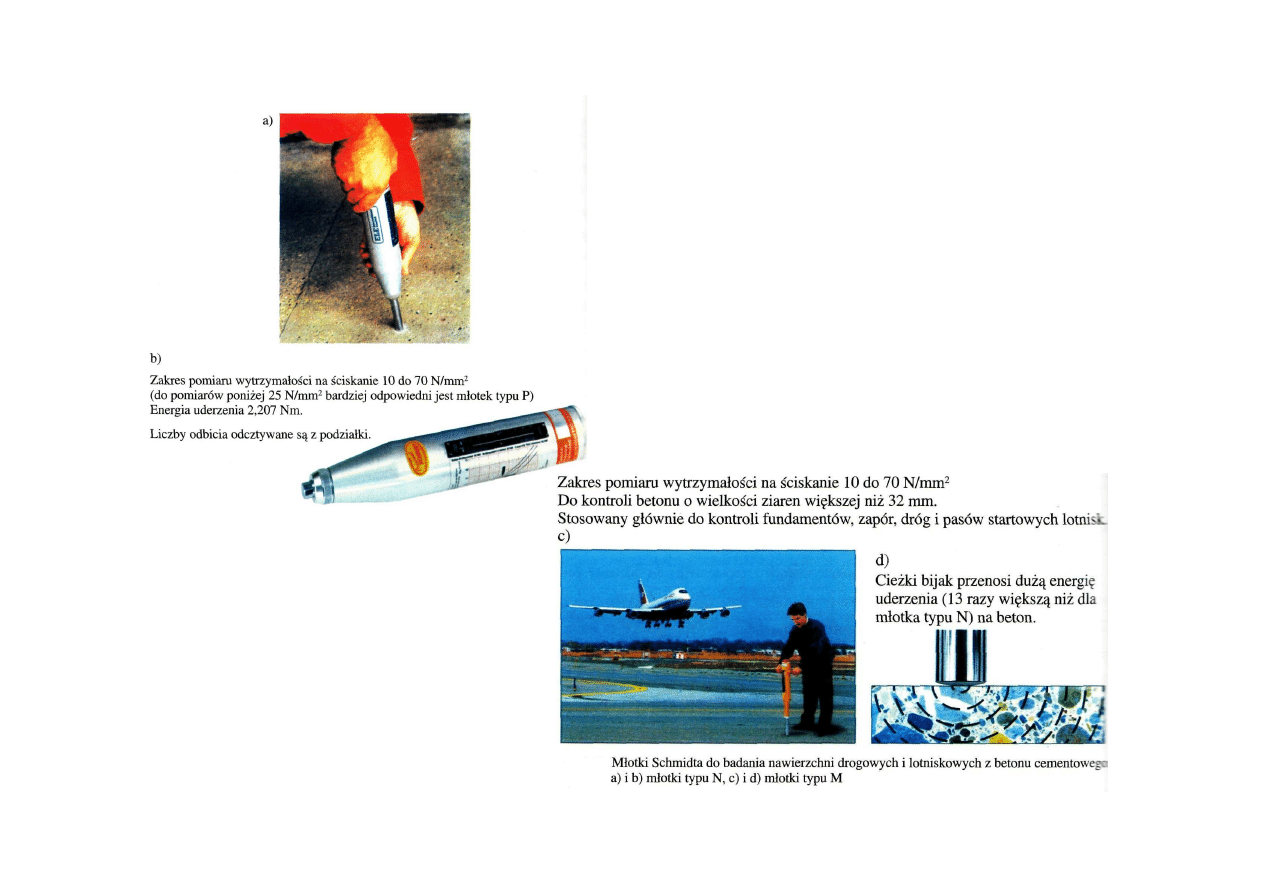
Metoda sklerometryczna (młotek Schmidta)
Metoda ta służy do oceny cech mechanicznych materiału na
podstawie twardości powierzchniowej. Młotek Schmidta
określa twardość powierzchniową na podstawie pomiaru
odskoku od badanej powierzchni ciężaru uderzającego z
określoną siłą. Uderzenie jest wywoływane układem
sprężynowym młotka

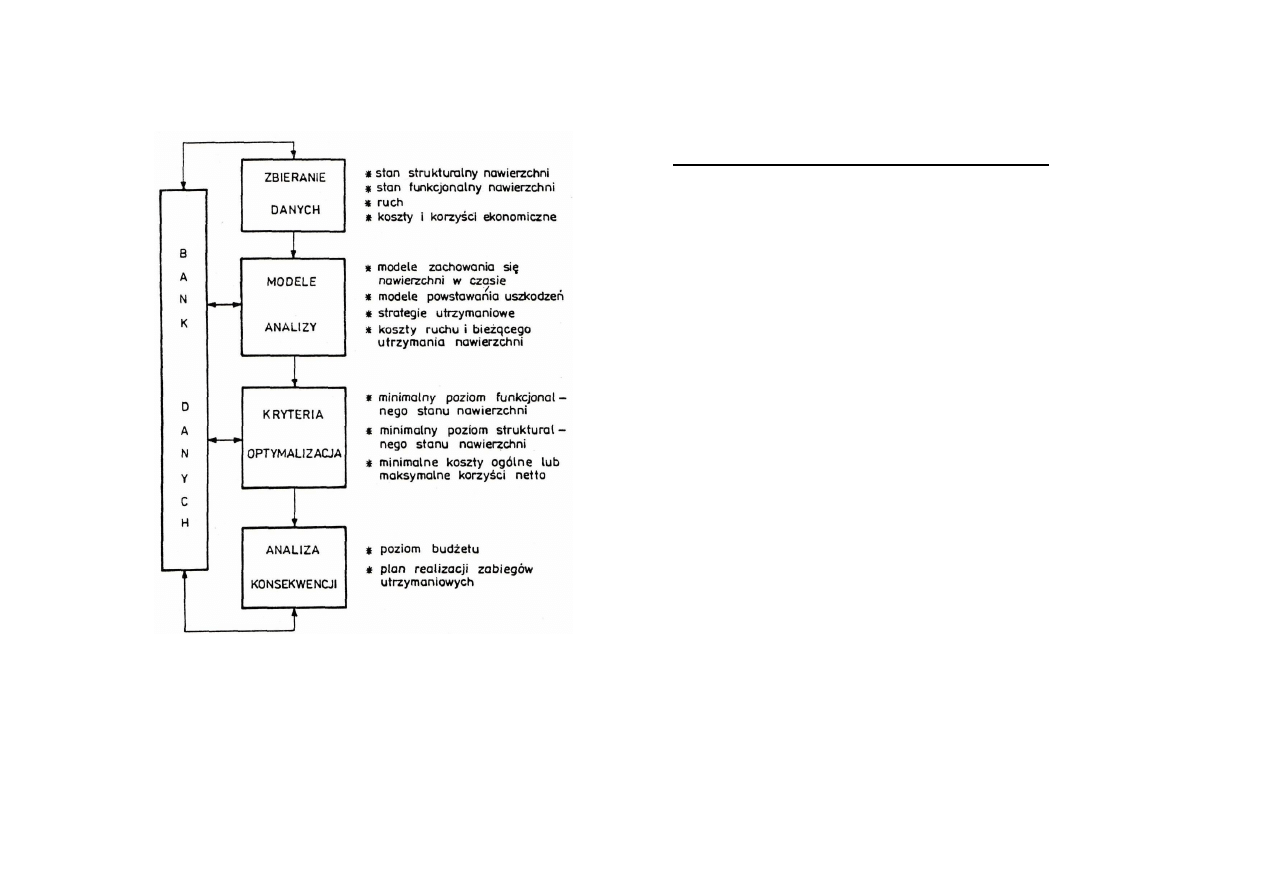
Systemy utrzymania nawierzchni
drogowych – PMS
(Pavement Management System)

Utrzymanie istniejących sieci drogowych, dróg lotniskowych
stanowi jeden z największych problemów administracji
drogowej, a środki materialne i finansowe rzadko w pełni
zaspokajają potrzeby w tym zakresie.
Dlatego też w latach 60-tych pojawiła się koncepcja
stworzenia systemu utrzymania nawierzchni PMS).

System utrzymania nawierzchni definiuje się jako
skoordynowany zespół czynności zmierzających do
osiągnięcia najlepszego wykorzystania dostępnych środków
w celu uzyskania złożonego poziomu cech eksploatacyjnych
nawierzchni umożliwiający bezpieczny i wygodne poruszanie
się pojazdu.
Podstawowe cele PMS:
-utrzymanie możliwie najlepszego stanu nawierzchni
zapełniającego jej ciągłość eksploatacyjną,
- systematyczną obserwację i analizę stopnia zużycia
nawierzchni,
- sporządzenie i przedstawianie opinii o stanie istniejącym
drogi wraz z propozycjami zabiegów utrzymaniowych
i renowacyjnych,
- określenie metody zminimalizowania w założonym czasie
ponoszonych kosztów utrzymania nawierzchni
Realizacja wymienionych celów PMS wymaga
dysponowania niezbędnymi procedurami, kryteriami lub
metodami m.in.:
- wizualne określenie stanu nawierzchni (komfortu jazdy,
szorstkości nawierzchni itp.),
- nieniszczące określenie wytrzymałości (nośności),
- określenie żywotności nawierzchni,
- określenie rodzaju i terminu zabiegów utrzymaniowych
i renowacyjnych.

System utrzymania nawierzchni w swej klasycznej
postaci jest dwustopniowy obejmujący dwa szczeble:
- I – sieci,
- II - odcinek
Pierwszy szczebel dotyczy sieci drogowej jako całości i
obejmuje sporządzanie inwentaryzacji danych, a jego
zasadniczym zadaniem jest opracowanie generalnego
programu i harmonogramu prac np.:
- stworzenie tzw. Banku Danych Drogowych,
- ogólna wizualna ocena stanu nawierzchni,
- prognozowanie żywotności nawierzchni,
- przygotowanie długofalowego programu prac

Drugim, obok kompleksowego porównywania wariantów
inwestycji drogowych, niezwykle istotnym
obszarem zastosowania PMS jest planowanie utrzymania dróg w
obrębie całych sieci drogowych. W
tym kontekście PMS wspomaga Zarządcę w udzieleniu
odpowiedzi na trzy fundamentalne pytania:
które odcinki sieci drogowej powinny zostać poddane zabiegom
utrzymaniowym?
jakie zabiegi należy zastosować?
kiedy (w którym roku kalendarzowym) należy je
przeprowadzić?
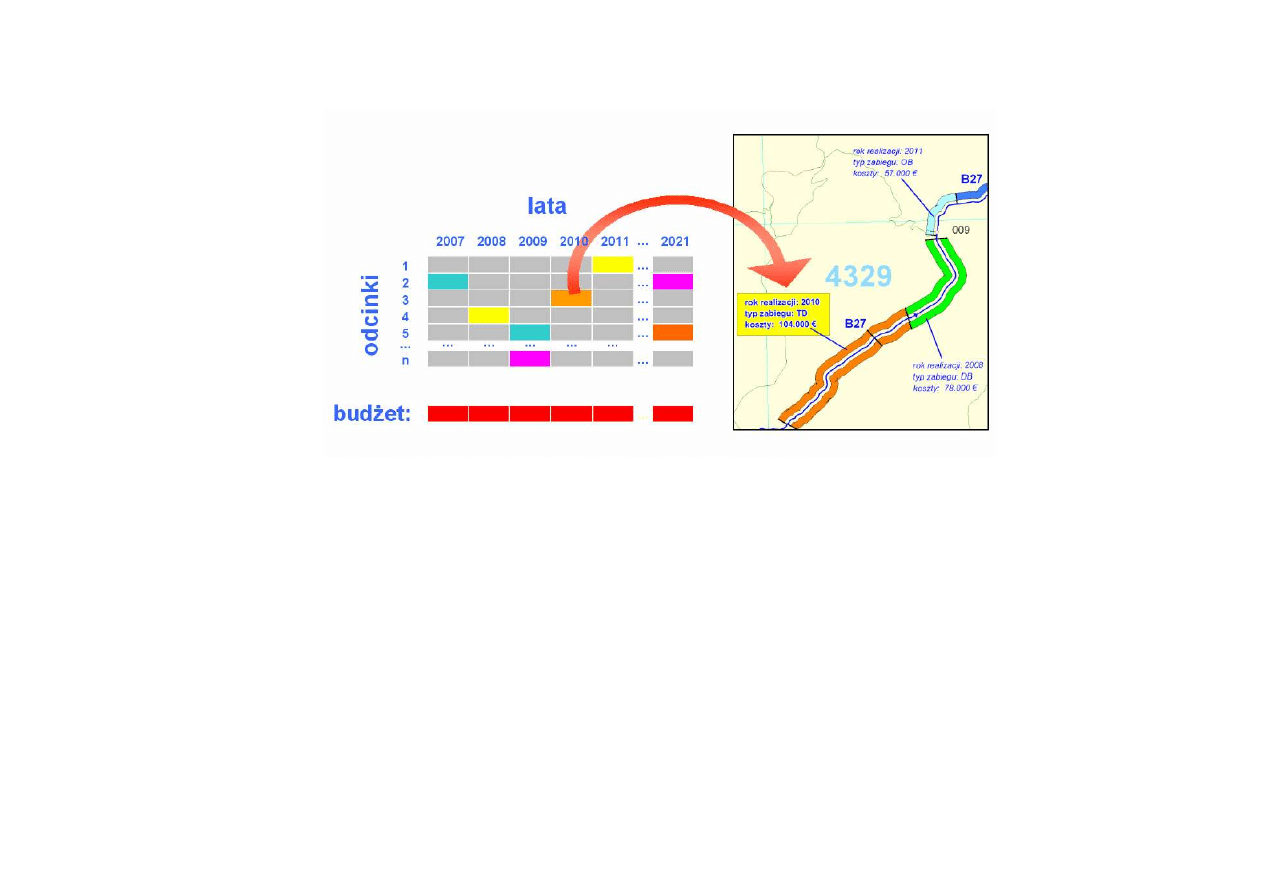
Każdemu programowi utrzymania nawierzchni przypisane są z jednej strony
koszty realizacji, z drugiej zaś korzyści, wynikające z jego przeprowadzenia.
Systemy utrzymania nawierzchni PMS umożliwiają kalkulację tych kosztów i
korzyści na przestrzeni długiego, wieloletniego horyzontu planowania oraz
optymalizację programów utrzymaniowych.

Model PMS składa się z szeregu modeli składowych (submodeli).
Model stanu nawierzchni
Model ten jest najistotniejszym z modeli PMS. Opisuje on stan
eksploatacyjny nawierzchni poprzez wskaźniki stanu:
- równość podłużna,
- głębokość kolein,
- współczynnik przyczepności,
- wskaźniki uszkodzeń powierzchniowych,
- wskaźnik przydatności użytkowej.

Model konstrukcji nawierzchni
Konstrukcja nawierzchni może być modelowana z różnym
stopniem szczegółowości.
Każda warstwa charakteryzowana jest trzema parametrami:
grubość, typ oraz rok wbudowania. Model nawierzchni
uwzględnia ponadto parametry podłoża naturalnego.

Model degradacji stanu nawierzchni
Modele degradacji stanu nawierzchni opisują jego zmienność w
czasie pod wpływem oddziaływania transportowego oraz
czynników klimatycznych i atmosferycznych.
Modele degradacji odnoszą się do poszczególnych wskaźników
stanu.

Model przedsięwzięć utrzymaniowych
Wszystkie typy przedsięwzięć utrzymaniowych, będących
przedmiotem planowania w ramach
PMS są poddane standardyzacji. Każdemu typowi
przypisywane są koszty jednostkowe oraz
określana ich skuteczność

Modele ruchu
Modele ruchu obejmują prognozę ruchu, w tym także prognozę
struktury rodzajowej oraz
koszty ruchu w zależności od stanu eksploatacyjnego
nawierzchni, jak również ocenę
zakłóceń płynności, spowodowanych realizacją robót
utrzymaniowych.
W drugim szczeblu opierając się o ustalenia generalne
dla całej sieci rozpatruje się zagadnienia szczegółowe dla
poszczególnych odcinków drogi. Poszczególne etapy
działań są podobne, lecz analizy i oceny dokonuje się
bardziej wnikliwie. Po określeniu rodzaju, wielkości i
kosztów robót przystępuje się do bezpośredniej jej
realizacji.
Bank Danych Drogowych
Są to zbiory danych o drodze i
nawierzchni, oprogramowanie i
algorytmy, sprzęt komputerowy,
ludzie i organizacja obsługi.
Należy tutaj podkreślić, że baza
danych o drogach jest czynnością
gromadzenia i przechowywania
danych.
Podstawowe dane gromadzone w Banku Danych
Drogowych
-historia drogi (czas budowy, rodzaj warstw, technologii,
zabiegi utrzymaniowe),
- geometria drogi (plan sytuacyjny, szerokość i liczba
pasów ruchu, profil podłużny, przekroje poprzeczne,
skrzyżowania, przejścia dla pieszych, wysokość nasypu i
głębokość wykopu),
- cechy eksploatacyjne (nośność, szorstkość, równość
podłużna i poprzeczna, uszkodzenia),
- wyposażenie i oznakowanie (lokalizacja znaków
drogowych, oświetlenia, odwodnienia,
Podstawowe dane gromadzone w Banku Danych
Drogowych
- charakterystyka ruchu (struktura rodzajowa, natężenie,
prędkość, daty pomiarów),
- wypadkowość (miejsca wypadków, daty, powody,
straty),
-Podział administracyjny (przynależność, klasa
techniczna).

Dobrze stworzony BDD powinien realizować
następujące funkcje użytkowe:
-zbieranie i przechowywanie danych,
- konsultowanie zbiorów i sprawdzanie ich zawartości,
- wykonanie analiz i wyliczanie standardowych
wskaźników oceny stanu nawierzchni,
- wykonywanie czynności optymalizacyjnych.
Wyniki takich analiz można wykorzystać do
programowania robót utrzymaniowych oraz do tworzenia
tzw. modeli żywotności nawierzchni.
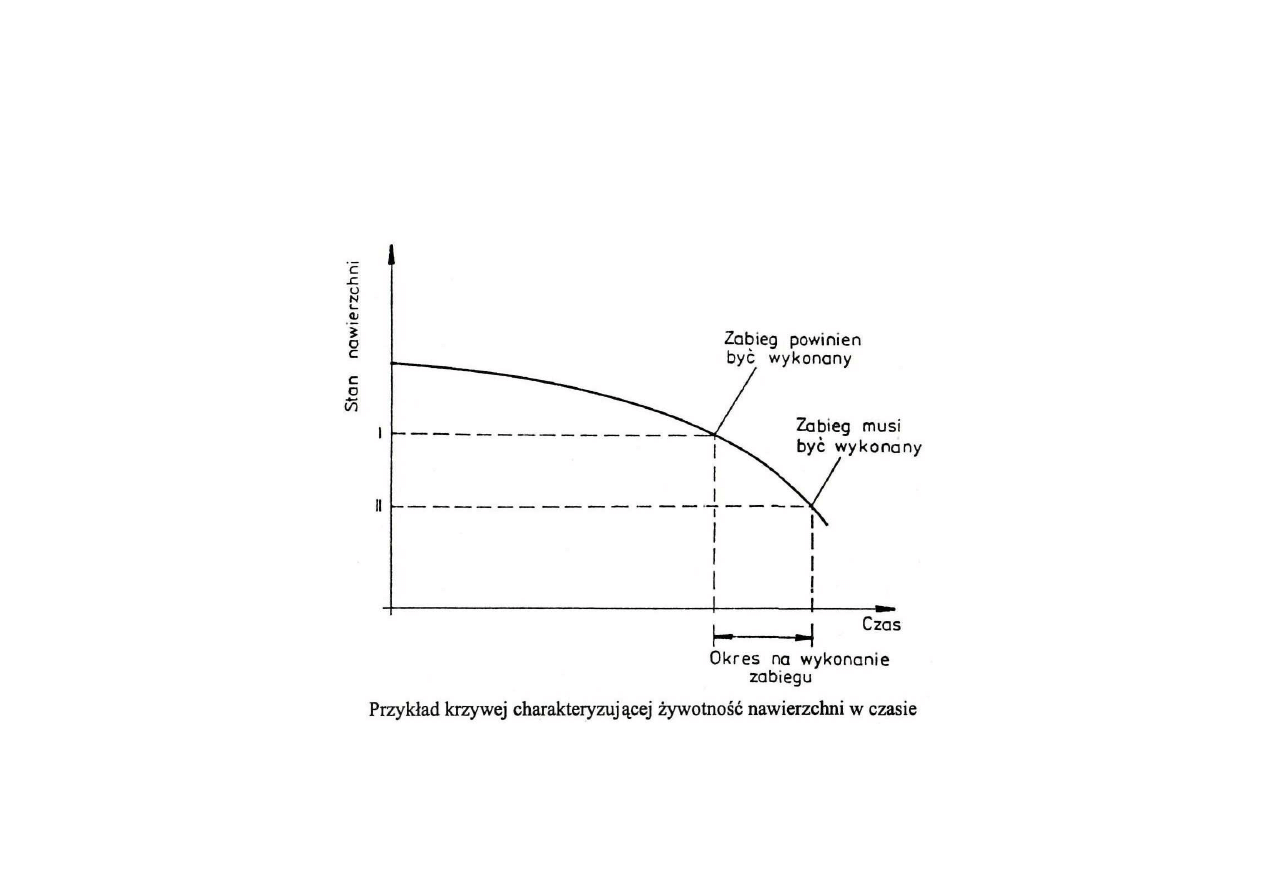
Modele żywotności nawierzchni
Wyszukiwarka
Podobne podstrony:
Infrastruktura transportu II w5
Infrastruktura transportu II w1 2
Infrastruktura transportu II w6
Infrastruktura transportu II w4
Infrastruktura transportu II w5
Infrastruktura transportu lotniczego, INFRASTRUKTURA LOGISTYCZNA
INFRASTRUKTURA TRANSPORTOWA CZĘŚĆ 1
Infrastruktura transportu projekt 2, STUDIA - Kierunek Transport, STOPIEŃ I, SEMESTR 1, Infrastruktu
Zapobieganie negatywnym skutkom transportu, II rok II semestr, BWC, Ekologia, ekologia rolnictwo
Demjaniuk Rozwój infrastruktury transportu drogowego
EKONOMIKA TRANSPORTU II
więcej podobnych podstron