1Budowa silnika skokowego.
Silnik skokowy- elektromechaniczny
przetwornik energii. Impuls sterujące
formowane s a w komutatorze- układzie
elektronicznym.Wirnik
czynny – z mag. trwałymi lub z cewką na
prąd stały
bierny- typy reluktancyjnego(zawierają
dodatkowo magnesy trwałe)
Stojan – bieguny wydatne lub utajone
2. Zasada działania silnika skokowego.
silnik skokowy
– silnik elektryczny, w
którym impulsowe zasilanie prądem
elektrycznym powoduje, że jego wirnik
nie obraca się ruchem ciągłym, lecz
wykonuje za każdym razem ruch
obrotowy o ściśle ustalonym kącie.
Spolaryzowany dwubiegunowo wirnik
zajmuje takie położenie by strumień był
zgodny ze strumieniem stojana
3. Narysuj i omów graniczną
częstotliwościową charakterystykę momentu
obciążenia
4. W jaki sposób i w jakim celu jest
stosowane forsowanie?
Forsowanie napięcia do momentu
osiągnięcia wartości nominalnej prądu a
potem jego podtrzymanie
W silnikach krokowych skrócenie czasu
dochodzenia prądu do wartości znamionowej
5. Omów rodzaje pracy silnika skokowego.
Ćwierdskokowa
Półskokowa – silnik wykonuje skok 45˚
Miniskokowa – możliwośd realizacji dużej
liczby miniskoków w granicach skoku
znamionowego
6. Omów parametr statycznego momentu
synchronizującego, przebieg teoretyczny
.
Statyst. Moment synchr- moment który
wytwarza silnik przy znamionowym zasilaniu,
przy określonym kącie położenia
wirnika.Określana jest na drodze
pomiarowej, Analitycznie jest zbyt trudno
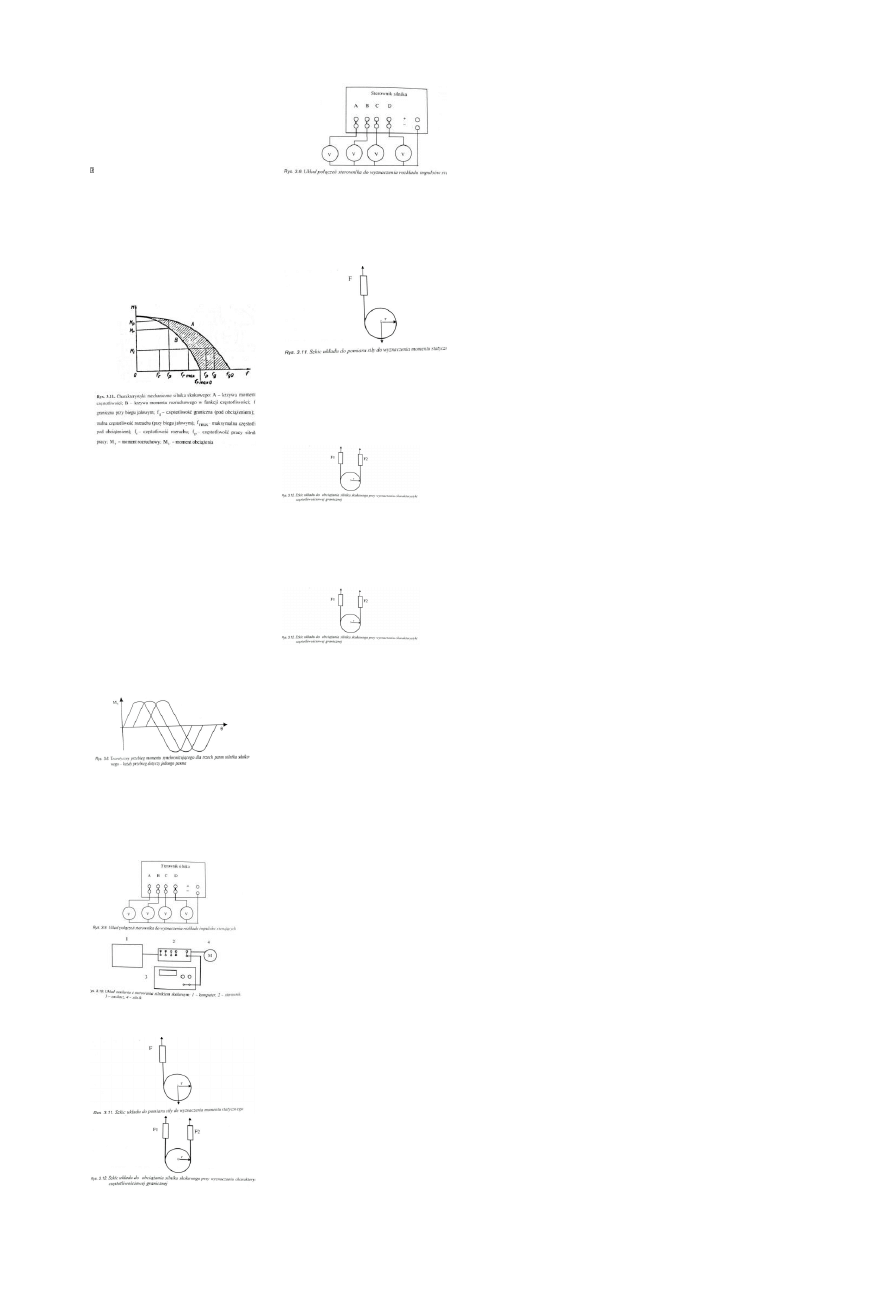
7. Budowa stanowiska laboratoryjnego.
Układy pomiarowe
.
Sterowanie silnika skokowego jest
realizowane przy pomocy komputera PC.
Sterowanie zapewnia pomiar prądu w
pasmach silnika , możliwośd obserwacji
napięc na oscyloskopie, zmianę kierunku
Obrotów
1u.p do wyznaczania rozkładu impulsów
sterujących
2Układ zasilania i sterowania 1-kom 2 –
sterownik 3 zasilacz
3u.p do pomiaru siły do wyznaczenia
momentu statycznego
4Szkic do obciążenia silnika przy wyznaczaniu
ch-ki czetot. granicznej
8. Sposób wyznaczania cyklogramów
impulsów sterujących.
Do pomiarów przyjmuje się częstotliwośd
1Hz. Uruchamia się na przemian opcje bieg i
stop lub zatrzymuje się silnik stop i wymusza
impulsy sterujące opcją 1 skok(k). Należy
narysowad cyklogramy dla wszystkich
rodzajów pracy.
9. Sposób wyznaczania charakterystyki
statycznego momentu synchronizującego,
przebieg teoretyczny.
Zaczepid jeden koniec linki o tarczę
umocowaną na wale silnika. Drugi koniec
połączyd z dynanometrem zawieszonym na
belce hamownicy. Silnik ustawid w tryb pracy
ćwierćokresowej i zatrzymad stop
.Następnie pokrętłem hamownicy
zwiększamy siłę naciągu. M=F*r
10. Sposób wyznaczania charakterystyki
częstotliwościowej granicznej, przebieg
teoretyczny.
Dokonad rozruch silnika a następnie ustawid
określoną częstotliwośd. Silnik obciąża się
hamownicą cierną. Następnie zwiększamy
obciążenie do ustalonej częstotliwości
zasilającej, aż do wypadnięcia z
synchronizmu. M= (F1-F2)*r
11. Sposób wyznaczania charakterystyki
częstotliwościowej rozruchowej
Ustala się częstotliwośd zasilania przy
zatrzymanym wirniku stop, a następnie
uruchamia wstępnie obciążony silnik bieg az
do momentu wystąpienia rozruchu. Moment
rozruchowy ustala sieą wykonując kilka
skoków poleceniem skok następnie regulując
go poktętłem hamownicy dla osiągnięcia
wymaganej wartości
Wyszukiwarka
Podobne podstrony:
18 Silnik uniwersalnyid 17837 Nieznany
18 Silnik uniwersalnyid 17837 Nieznany
silnik skokowy przebiegi czasowe
5 pradnice i silniki id 40384 Nieznany
Silnik skokowy sterowany komputerem
Sprawozdanie Cw 5 silnik skokowy
Bezszczotkowy silnik pradu stal Nieznany (2)
geometria i garsc dowodow id 18 Nieznany
funkcje transporterow ABC id 18 Nieznany
Silnik skokowy
7 silnik skokowy reluktancyjny instrukcja
Badanie silnika indukcyjnego je Nieznany
1f struktury orgaizacyjneid 18 Nieznany (2)
Badanie silnika bocznikowego A4 Nieznany (2)
klasyfikacja silnikow id 235931 Nieznany
Gamo P23 CO2 ilmapistooli id 18 Nieznany
projekt silniki id 399540 Nieznany
irek sels, SILNIK SKOKOWY
więcej podobnych podstron