
1
Sterowanie silnika skokowego reluktancyjnego
Instrukcja do ćwiczenia
Celem ćwiczenia jest zapoznanie się z budową silnika skokowego reluktancyjnego, sposobem
sterowania oraz wyznaczeniem jego charakterystyk dynamicznych. Silnik skokowy
rekuktancyjny z uwagi na swą budowę najczęściej zasilany jest unipolarnie. Najprostszym
sposobem jego sterowania jest sterowanie napięciowe. W takim przypadku napięcie zasilające
jest podawane na poszczególne pasma bez żadnych ograniczeń. Daje to dobre rezultaty w
zakresie stosunkowo małych częstotliwości pracy. Wraz ze wzrostem częstotliwości
taktowania prądy w poszczególnych nie osiągają już wartości ustalonych. Tym samym
prowadzi to ograniczenia wartości wytwarzanego momentu a w konsekwencji do zatrzymania
silnika. Jedną z metod zapobiegania temu problemowi jest stosowanie tzw. forsowanie
wzbudzenia. Polega ono na zwiększeniu wartości napięcia zasilającego przy jednoczesnym
dołączeniu dodatkowej rezystancji R
d
ograniczającej wartość prądu do wartości znamionowej.
Układ sterowania silnika zbudowano w oparciu o układ mikroprocesora 8-bitowego.
Umożliwia ona płyną zmianę częstotliwości podawanych impulsów, zmianę kierunku
wirowania oraz komutowanie uzwojeń w sekwencji 1/4, 1/2 i 3/8.
Parametry znamionowe czteropasmowego silnika skokowego EDS20:
napięcie znamionowe U
N
=15V,
prąd znamionowy I
Nph
=3.7A,
pobór mocy PinN =120 W,
skok znamionowy α
N
=3°,
moment znamionowy T
N
=4 Nm,
maksymalny moment synchronizujący T
Ns
=10 Nm,
moment rozruchowy T
l
=71 Nm,
moment bezwładności wirnika J=53300* 10
-7
kgm
2
,
rezystancja pasma R
ph
=3.95 Ω,
impedancja pasma Z
ph
=30.5 Ω,
częstotliwość graniczna f
g
=75 Hz.
2
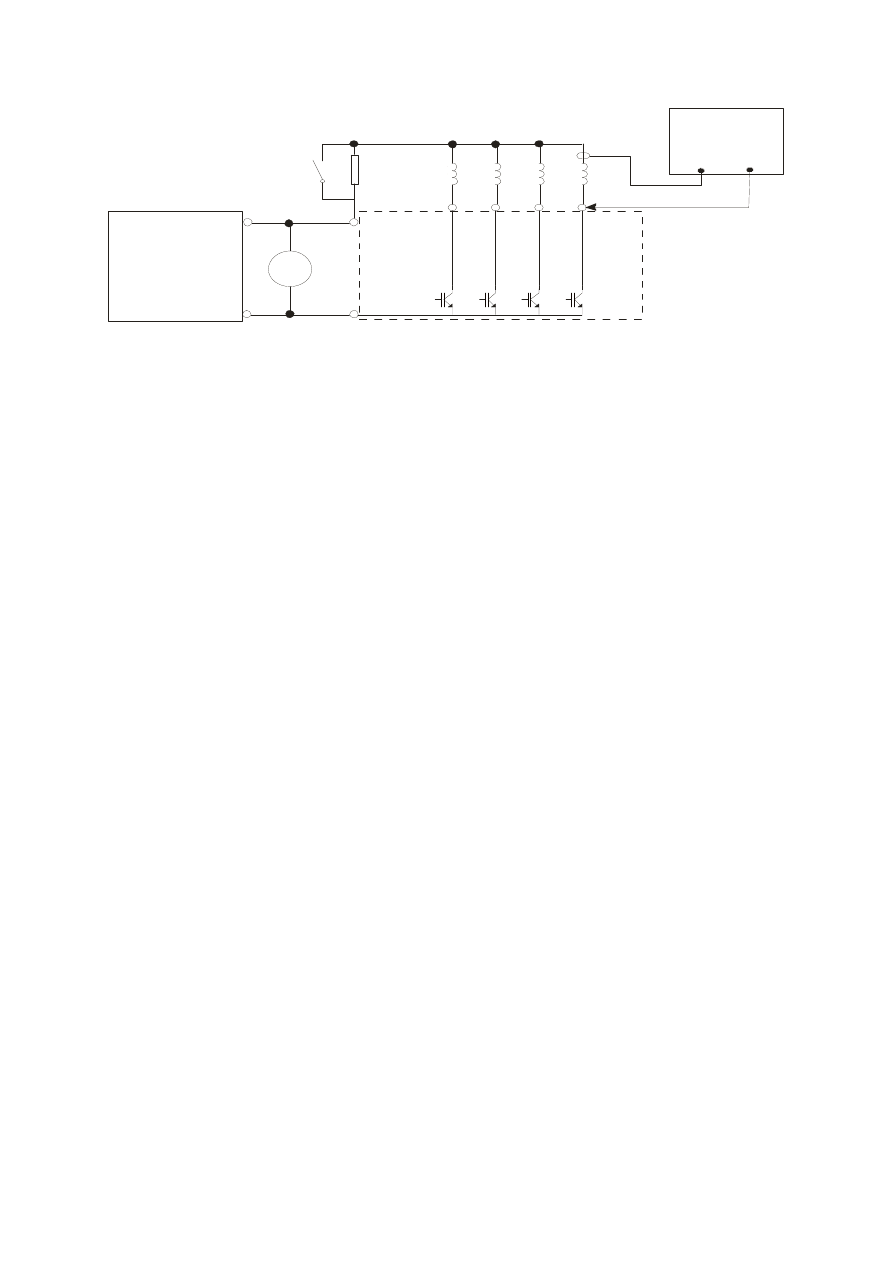
W
Rd
Zasilacz
V
+
+
-
-
T1
T2
T3 T4
Ph1 Ph2 Ph3 Ph4
Mikroprocesorowy sterownik
silnika skokowego
Oscyloskop
cyfrowy
Rys. 1 Schemat pomiarowy do badania silnika skokowego reluktancyjnego
Program ćwiczenia:
1.
Zapoznanie się z budową, sposobem konfiguracji uzwojeń i danymi katalogowymi
silnika.
2.
Połączenie układu pomiarowego zgodnie ze schematem pomiarowym pokazanym na
rysunku 1.
3.
Wyznaczanie zależności częstotliwości granicznej f
g
=f(T
L
) oraz rozruchowej f
l
= f(T
L
)
przy (U
dc
=12V) dla pracy silnika przy:
•
Komutacji symetrycznej 1/4,
•
Komutacji symetrycznej 1/2,
•
Komutacji niesymetrycznej 3/8.
4.
Wyznaczanie zależności częstotliwości granicznej f
g
=f(T
L
) oraz rozruchowej f
l
= f(T
L
)
w warunkach forsowania wzbudzenia (U
dc
=15V oraz R
ad
≈
1
Ω
) dla pracy silnika przy:
•
Komutacji symetrycznej 1/4,
•
Komutacji symetrycznej 1/2,
•
Komutacji niesymetrycznej 3/8.
5.
Wyznaczanie zależności częstotliwości nawrotu f
n
=f(T
L
) przy (U
dc
=12V) dla pracy
silnika przy:
•
Komutacji symetrycznej 1/4,
•
Komutacji symetrycznej 1/2,
•
Komutacji niesymetrycznej 3/8
6.
Obserwacja przebiegów czasowych prądu i napięcia

3
7.
Obliczanie momentu obciążenia:
mgr
r
F
T
L
=
×
=
gdzie:
r = 0.1m,
m – masa obciążników [kg],
g – przyspieszenie ziemskie [m/s
2
].
Wyszukiwarka
Podobne podstrony:
silnik skokowy przebiegi czasowe
Silnik skokowy sterowany komputerem
Sprawozdanie Cw 5 silnik skokowy
Silnik skokowy
A3 Silnik indukcyjny pierscieniowy instrukcja
i1 Silnik STRATTON, BHP, Instrukcje-Jednostronicowe
irek sels, SILNIK SKOKOWY
Instrukcja bhp i eksploatacji wózków jezdnych z silnikiem spalinowym, BHP, Instrukcje BHP, Transport
i1 Wózek silnikowy jezdniowy, BHP, Instrukcje-Jednostronicowe
silnik skokowy, różne
Badanie silnika skokowego, Elektrotechnika, Rok 3, Maszyny elektryczne
1Budowa silnika skokowego3id 18 Nieznany (2)
Badanie silnika skokowego, Badanie silnika skokowego, POLITECHNIKA RADOMSKA
P1 Silnik prądu stałego instrukcja
silnik skokowy przebiegi czasowe
silnik skokowy list2003
więcej podobnych podstron