
Laboratorium Podstaw Elektrotechniki i Elektroniki
dla studentów WIP
Temat:
SILNIK SKOKOWY
PRZETWORNIKI OPTOELEKTRONICZNE
materiały pomocnicze do laboratorium elektroniki, elektrotechniki i energoelektroniki
wyłącznie do użytku wewnętrznego przez studentów WIP PW
bez prawa kopiowania i publikowania
Zakład Trakcji Elektrycznej
IME PW
2003
- -
1
1. Podstawowe wiadomości o silnikach skokowych
Silniki skokowe należą do elektromechanicznych przetworników energii przetwarzających. podawane na
uzwojenie silnika impulsy elektryczne, pojedyncze lub ich ciąg, na mechaniczne przemieszczenie kątowe
lub liniowe. Są one stosowane w układach automatyki jako elementy wykonawcze (serwomechanizmy).
Ze względu na impulsowe sterowanie i dyskretny charakter pracy, silniki skokowe są szczegó1nie
przydatne jako serwomechanizmy w urządzeniach sterowanych numerycznie.
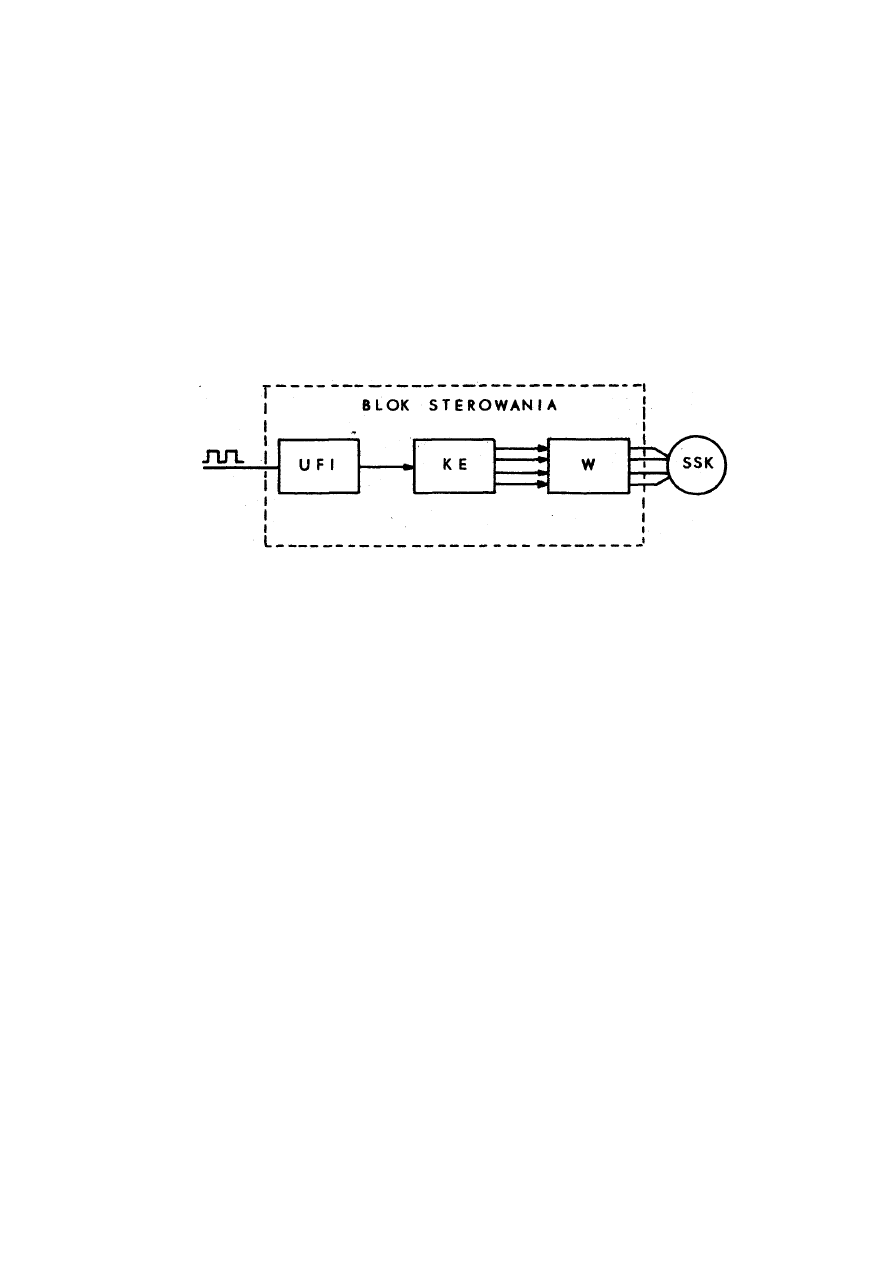
Na rys.1 przedstawiono schemat układu napędowego z silnikiem sokowym. Ciąg impulsów sterujących
doprowadzony jest do układu formowania impulsów, skąd sygnał o odpowiednim kształcie podawany jest
do komutatora elektronicznego i po wzmocnieniu na wybrane przez komutator uzwojenie silnika
skokowego SSK.
rys.1 Schemat układu napędowego otwartego z silnikiem sokowym
Przedstawiony na rys.1 układ napędowy jest układem otwartym. Jeżeli w układzie tym zastosuje się
sprzężenie zwrotne, przekazujące sygnał o położeniu wirnika lub innego związanego z nim elementu
wykonawczego na wejście układu, otrzyma się układ napędowy zamknięty. Sygnał sprzężenia zwrotnego
jest porównywany z ciągiem impulsów sterujących. (sygnałem zadającym położenie wirnika). Otrzymany
w wyniku porównania sygnał błędu powoduje korekcje położenia wirnika.
Istnieją trzy podstawowe rodzaje silników skokowych:
- silniki magnetoelektryczne,
- silniki reluktancyjne,
- silniki hybrydowe.
Zasada pracy każdego silnika opiera się na dyskretnych zmianach pola magnetycznego, które powodują
ściśle określone przemieszczenia kątowe wirnika - czyli skoki.
Podstawowymi cechami wyróżniającymi silniki skokowe spośród innych rodzajów silników są:
- jednokrotny impuls prądu przepływającego przez uzwojenie silnika - niezależnie od czasu jego
przepływu (powyżej pewnego minimum);
- powoduje tyko jeden skok wirnika o kąt zawsze mniejszy od 180°;
- droga kątowa wirnika (skok) jest taka sama dla każdego impulsu prądowego i nie zależy ani od długości
jego trwania, ani od jego wartości - jeśli tylko nie wykracza on poza ustalone wartości graniczne;
- wirnik silnika przyjmuje zawsze te same położenia, zwane pozycyjnymi w których się zatrzymuje.
Stojan silnika skokowego jest wykonany ze stali elektrotechnicznej i ma bieguny wydatne lub utajone.
2. Silnik skokowy magnetoelektryczny (o wirniku czynnym)
Silniki magnetoelektryczne maja wirnik z magnesami trwałymi (czynny), tworzącymi bieguny wydatne
lub magnes pierścieniowy wielobiegunowy. Silniki o tej konstrukcji charakteryzują się możliwością
- -
2
uzyskiwania dużych momentów obrotowych, małą wartością elektromechanicznej stałej czasowej i
zdolnością zapamiętywania ostatniego skoku nawet po wyłączonym zasilaniu. Wadą tych. silników jest
duży moment; bezwładności wirnika, mała częstotliwość pracy i niewielka częstotliwość rozruchowa.
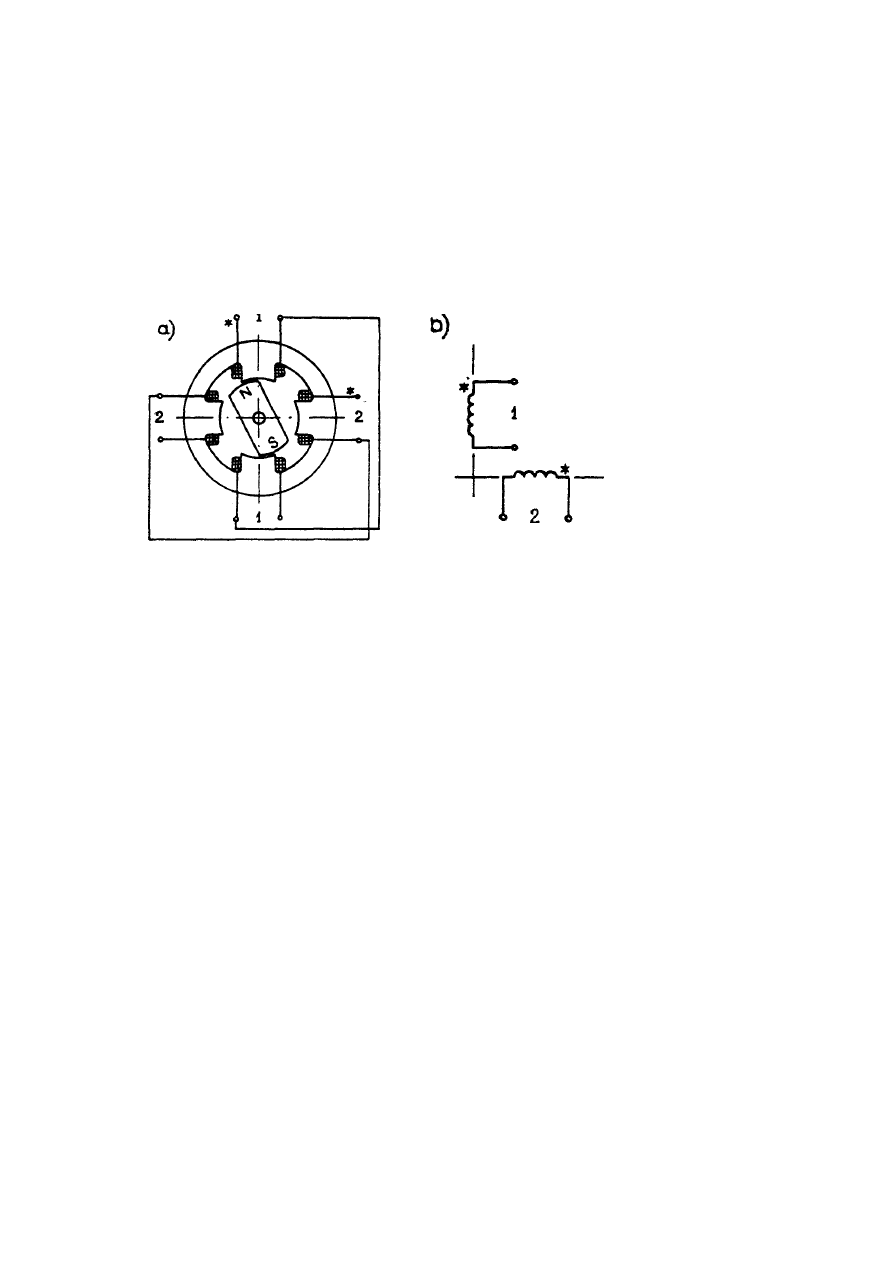
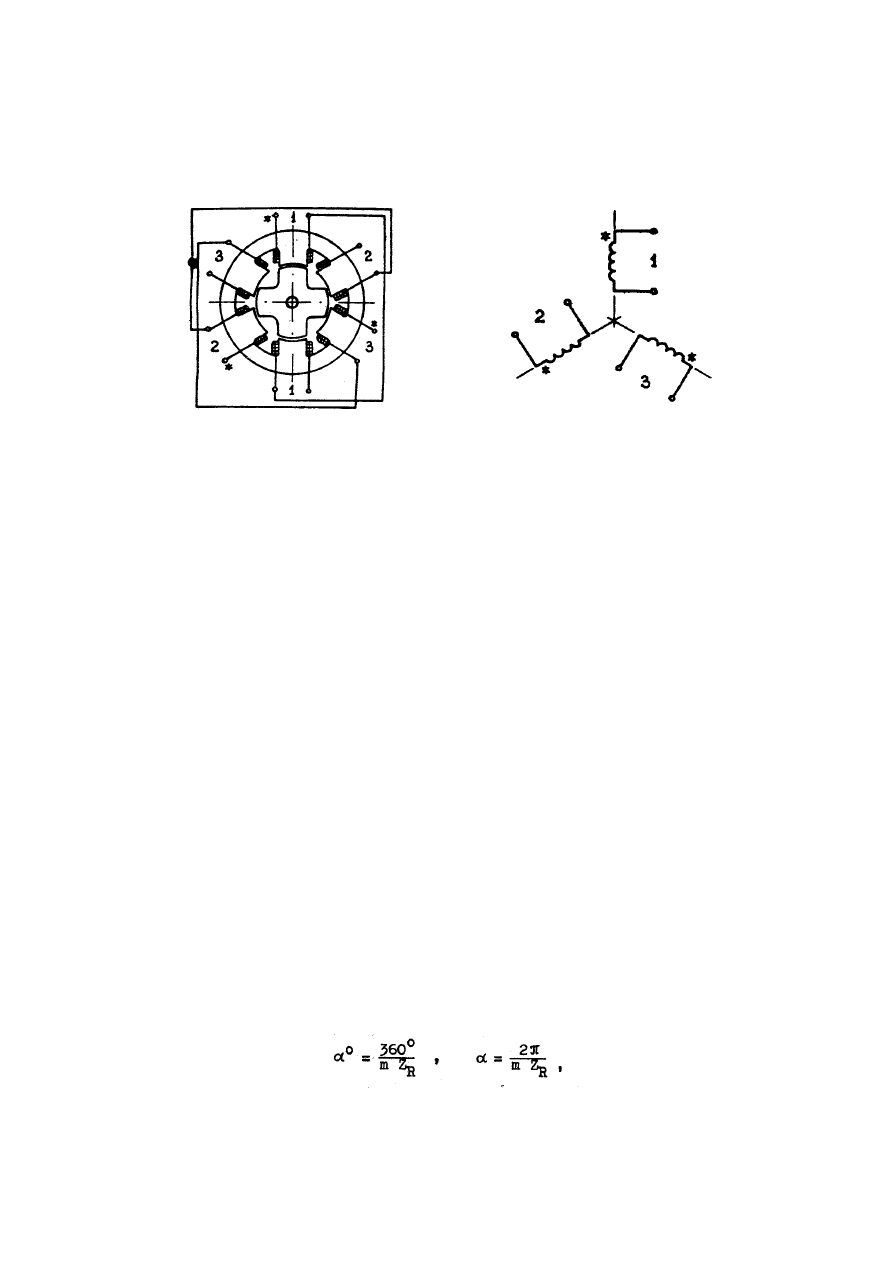
Model silnika skokowego o wirniku czynnym z magnesem trwałym jest przestawiony na rys.2a. Stojan
ma cztery bieguny wydatne na których znajdują się cztery jednakowe cewki uzwojenia sterującego.
Cewki na przeciwległych biegunach połączone są szeregowo tworząc w ten sposób uzwojenie
dwufazowe (rys.2b). Wirnik o dwóch wydatnych biegunach wykonany jest z magnesu trwałego.
Działanie silnika przy założeniu, że nie jest on obciążony jest następujące. Jeżeli zasilić uzwojenie 1
napięciem o dodatniej (umownie) biegunowości, to wytworzy ono strumień
φ
1
,
rys. 2 Model silnika skokowego o wirniku czynnym (a) i schemat jego uzwojeń sterujących (b)
skierowany od bieguna N do bieguna S stojana. Wówczas wirnik ustawi się wzdłuż tego strumienia tak,
aby przewodność magnetyczna na drodze strumienia
φ
1
była największa (rys.2a) . W tym przypadku
strumień stojana
φ
S
=
φ
1
. Jeżeli teraz dodatkowo zasilić uzwojenie 2 napięciem o dodatniej (umownie)
biegunowości, to wytworzy ono strumień
φ
2
, a strumień stojana
φ
S
będzie wypadkowym strumieni
φ
1
i
φ
2
.
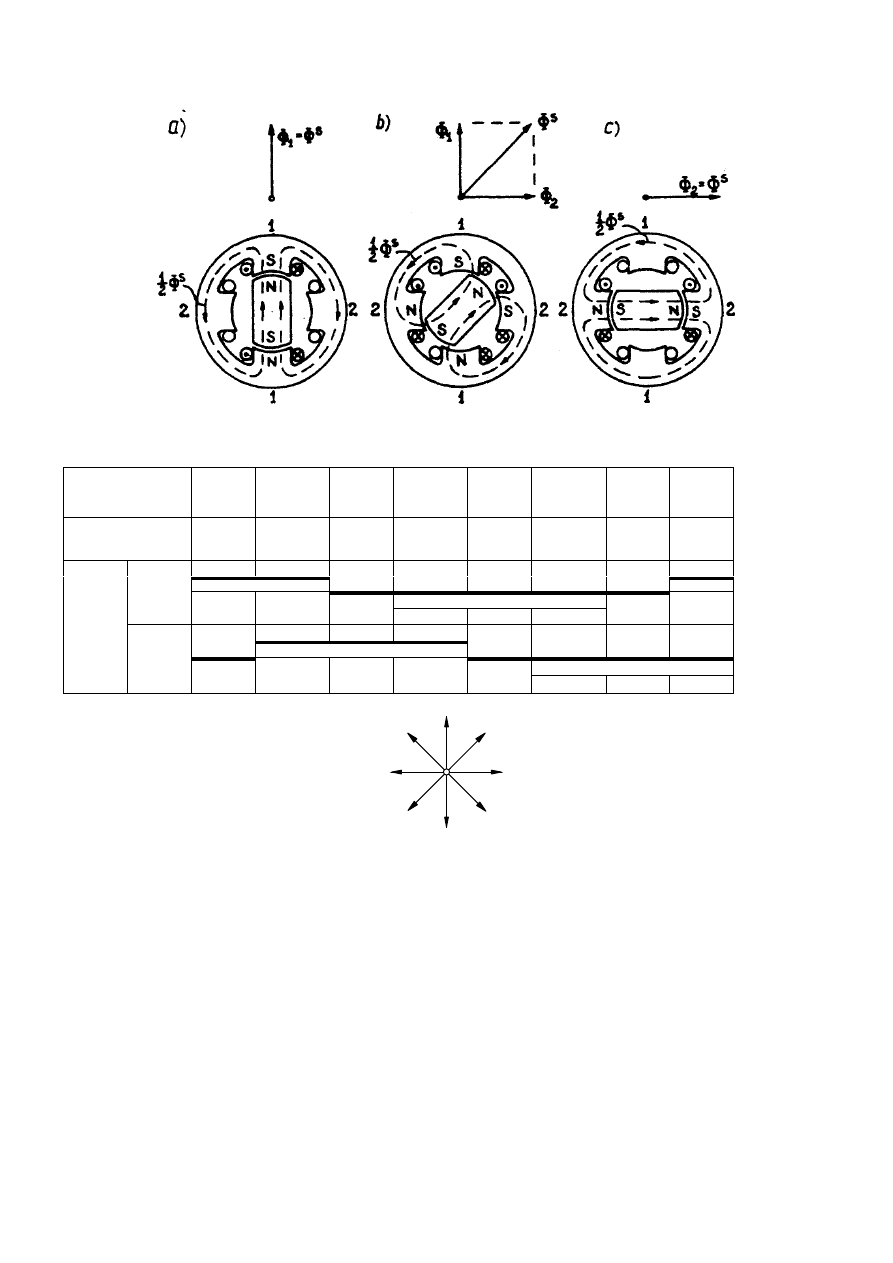
Wirnik ustawi się wówczas wzdłuż strumienia
φ
S
,następnie, po odłączeniu uzwojenia 1 od napięcia
strumień
φ
S
,będzie identyczny ze strumieniem
φ
2
, a wirnik zajmie położenie wzdłuż strumienia
φ
S
=
φ
2
(rys.3c). Kolejne położenie wirnika można uzyskać, jeżeli zasili się uzwojenie 1 napięciem o ujemnej
biegunowości, a uzwojenie 2. napięciem o dodatniej biegunowości. W ten sposób można zrealizować 8
stanów elektrycznych uzwojeń sterujących (8 taktów). Na rys.4a przedstawiono pełen cykl komutacji
uzwojeń analizowanego silnika, a na rys.4b wykres położeń w przestrzeni osi wypadkowego strumienia
stojana odpowiadających poszczególnych taktom.
Z przedstawionego rozumowania wynika, że kolejnym stanom zasilania uzwojeń stojana odpowiadają
kolejne położenia w przestrzeni wektora strumienia wypadkowego. Równocześnie każdemu położeniu
wektora strumienia odpowiada jedno ustalona położenie wirnika, czyli skokowa zmiana położenia
wektora strumienia uwidacznia się na zewnątrz jako skokowa zmiana położenia wirnika.
W zależności od ruchu (skoku) pola magnetycznego magnes trwały wirnika ustawia się zgodnie z
kierunkiem tego pola.
- -
3
rys. 3 Zasada działania silnika skokowego o wirniku czynnym:
a)
Takty komutacji
l
2
3
4
5
6
7
8
ozn. stanów
elektrycznych
(+1)
(+1,+2)
(+2)
(-1,+2)
(-1)
(-1,-2)
(-2)
(+1,-2)
uzwoj
1
biegun
owość
napięć
zasil.
uzwoj
2
b)
1
3
2
4
5
6
7
8
rys. 4 Ilustracja sposobu zasilania uzwojeń sterujących silnika skokowego zapewniającego otrzymanie
różnych taktów komutacji (a) oraz odpowiadające tym taktom położenia w przestrzeni osi wypadkowego
strumienia stojana (b)
Zasilając kolejno fazy silnika impulsami prądowymi, powodujemy skokowe przesuwanie się wirnika w
określonym kierunku. W celu określenia wartości momentu synchronizującego położenie wirnika z
polem magnetycznym przyjmuje się następujące założenia:
- indukcja magnetyczna wywoływana przez magnes wirnika w szczelinie silnika ma przebieg
kosinusoidalny w stosunku do osi podłużnej wirnika d,
- stojan silnika jest ,,gładki" w sensie magnetycznym,
- komutator elektroniczny współpracujący z silnikiem, pozwala na dowolny sposób połączenia uzwojeń
faz ze źródłem napięcia zasilania,
- -
4
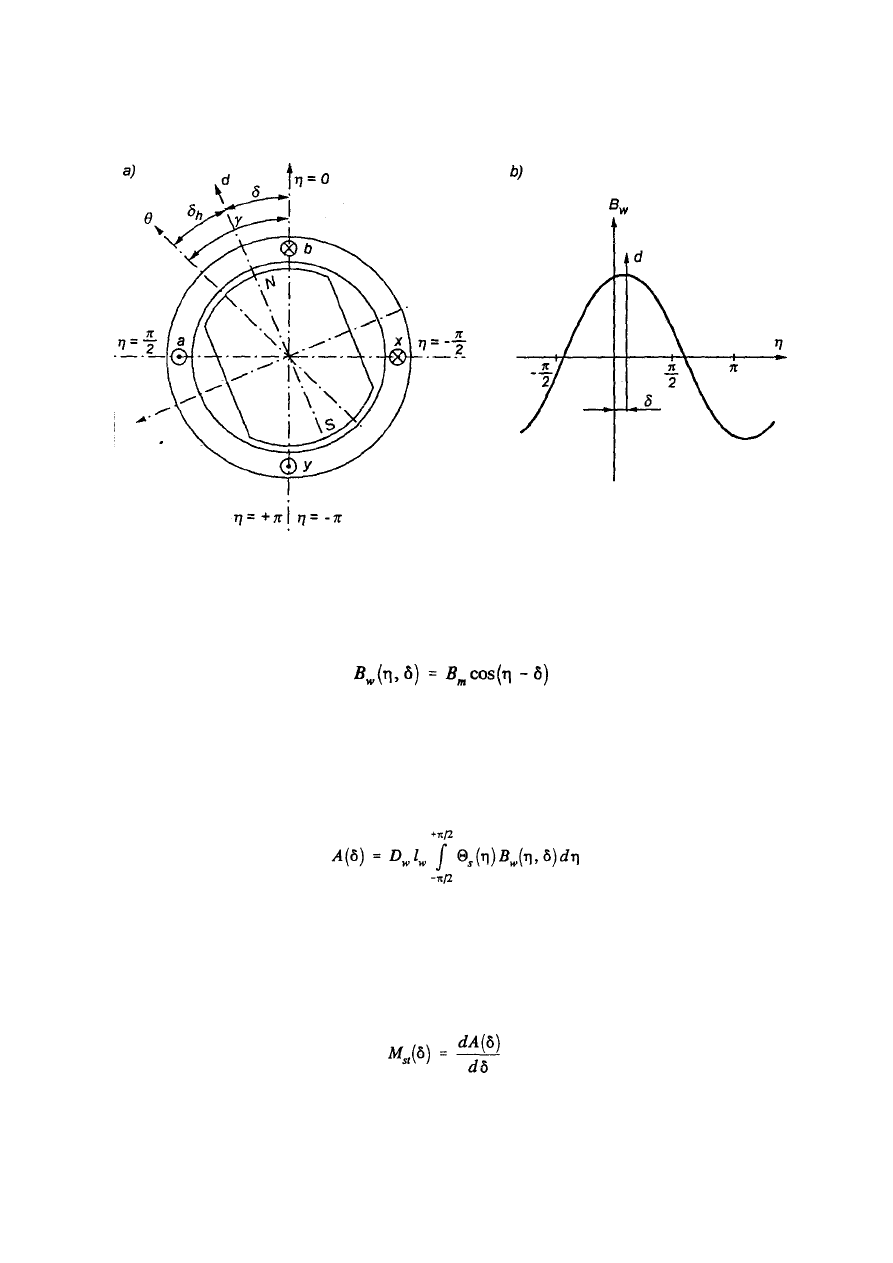
- wirnik silnika zablokowany jest mechanicznie w pozycji jak na rys.5, a kąt
δ określający położenie
wirnika względem stojana, a wiec i rozkład indukcji w szczelinie, są niezmienne.
rys. 5 Schemat magnetoelektrycznego, dwufazowego silnika skokowego (a) oraz rozkład indukcji
wirnika w szczelinie (b)
Po uwzględnieniu tych założeń, zapis rozkładu indukcji magnetycznej w szczelinie silnika będzie miał
postać:
przy czym: B
m
- wartość maksymalna indukcji magnetycznej wirnika w osi podłużnej d.
Moment synchronizujący położenie osi podłużnej wirnika z polem stojana jest pochodną energii
układu względem kąta położenia wirnika
δ. Energię układu można wyznaczyć, znając rozkłady indukcji
magnetycznej wirnika i przepływu magnetycznego stojana - wynosi ona:
przy czym:
D
w
, l
w
— średnica i długość wirnika,
Θ
s
- przepływ magnetyczny stojana,
B
w
- indukcja magnetyczna wirnika.
Ogólne równanie opisujące moment synchronizujący silnika ma postać:
Uzwojenie fazowe stojana jest uzwojeniem sterującym w całości (jak na rys.2b) albo dzieli się je na dwa
uzwojenia sterujące, których osie magnetyczne przesunięte są w przestrzeni o 180° (jak na rys.6). W tym
przepadku podwaja się liczba faz uzwojenia sterującego i wystarczy stałobiegunowe, jednokierunkowe
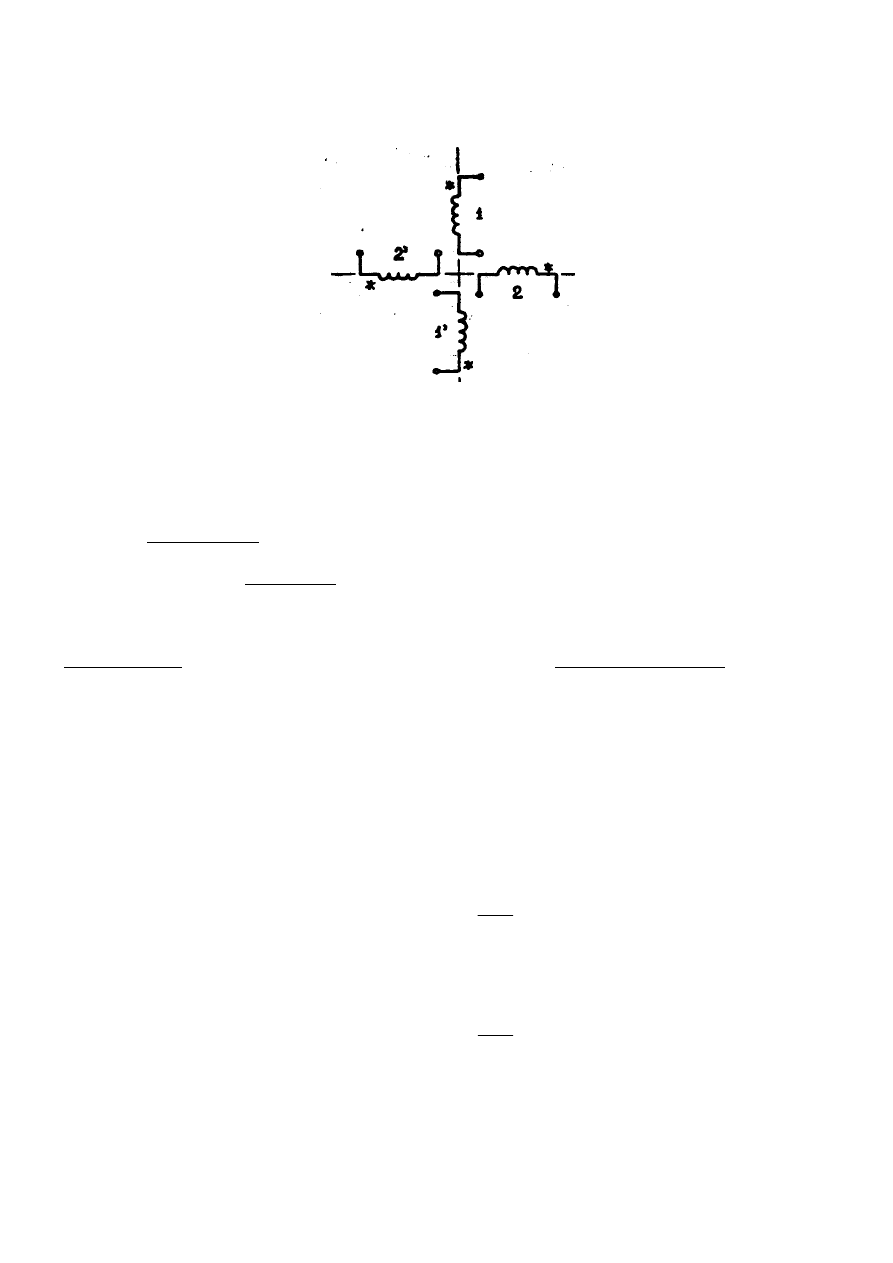
- -
5
zasilanie uzwojeń aby otrzymać te same położenia wektora strumienia co na rys.4b. Np. (+1), (+1,+2),
(+2), (+1',+2), (+1'), (+1’ ,+2’), (+2'), (+1.+2').
rys. 6 Schemat uzwojenia czterofazowego
Do tej pory zakładaliśmy, że kolejnym taktom odpowiada zasilanie pojedynczej fazy, a następnie dwóch
faz uzwojenia sterującego. Jeżeli natomiast możliwe jest zasilanie tylko pojedynczych faz, to np. dla
uzwojenia dwufazowego otrzymuje się 4 takty komutacji - (+1), (+2), (-1), (-2). Podobnie jest w
przypadku gdy możliwe jest zasilanie tylko jednoczesne dwóch faz - (+1.+2), (-1,+2), (-1,-2). (+1,-2).
Jeżeli w różnych taktach ma miejsce wzbudzenie różnych liczb uzwojeń, to mamy do czynienia z
komutacją niesymetryczną. Otrzymuje się wtedy różne wartości wypadkowego strumienia stojana dla
taktów parzystych i nieparzystych.
Komutację nazywa się symetryczną, jeżeli dla wszystkich taktów wzbudzana jest jednakowa liczba
uzwojeń sterowania (pojedynczo, parami, po trzy itd.). Wartość wypadkowego strumienia stojana jest
wówczas dla wszystkich taktów jednakowa.
Jeżeli w czasie cyklu komutacji napięcie sterujące jest jednego znaku wówczas mówimy o komutacji
stałobiegunowej, jeżeli natomiast zmienia znak to jest to komutacja przemienno-biegunowa.
W ogólnym przypadku liczba taktów k w cyklu komutacji (a więc również liczba ustalonych położeń
wirnika w przedziale 360° elektrycznych). jest proporcjonalna do liczby uzwojeń sterowania m i zależy
od sposobu komutacji
2
1
n
n
m
k
⋅
⋅
=
(1)
przy czym n
1
= 1 dla komutacji symetrycznej, n
1
= 2 dla niesymetrycznej oraz n
2
= 1 dla komutacji
stałobiegunowej, n
2
= 2 ale przemiennobiegunowej.
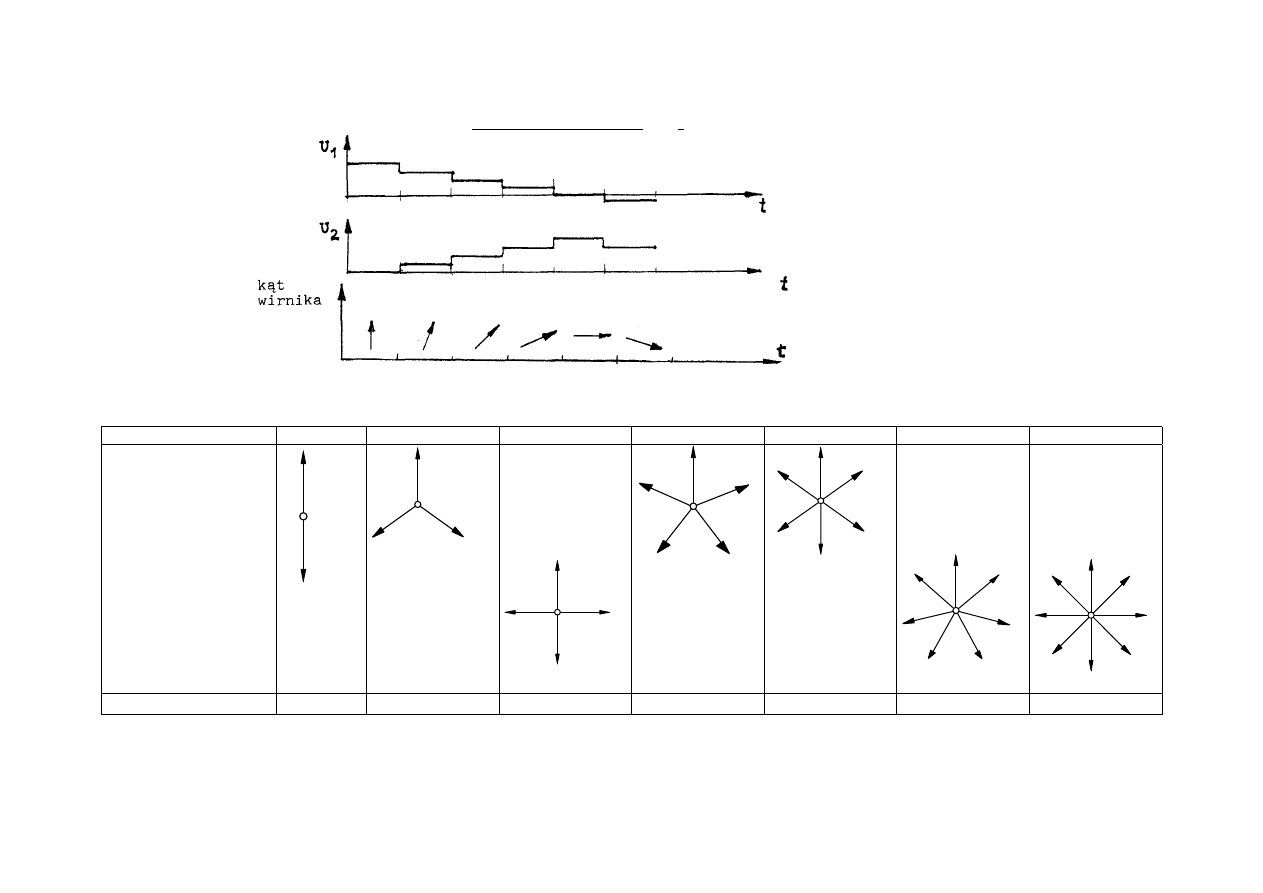
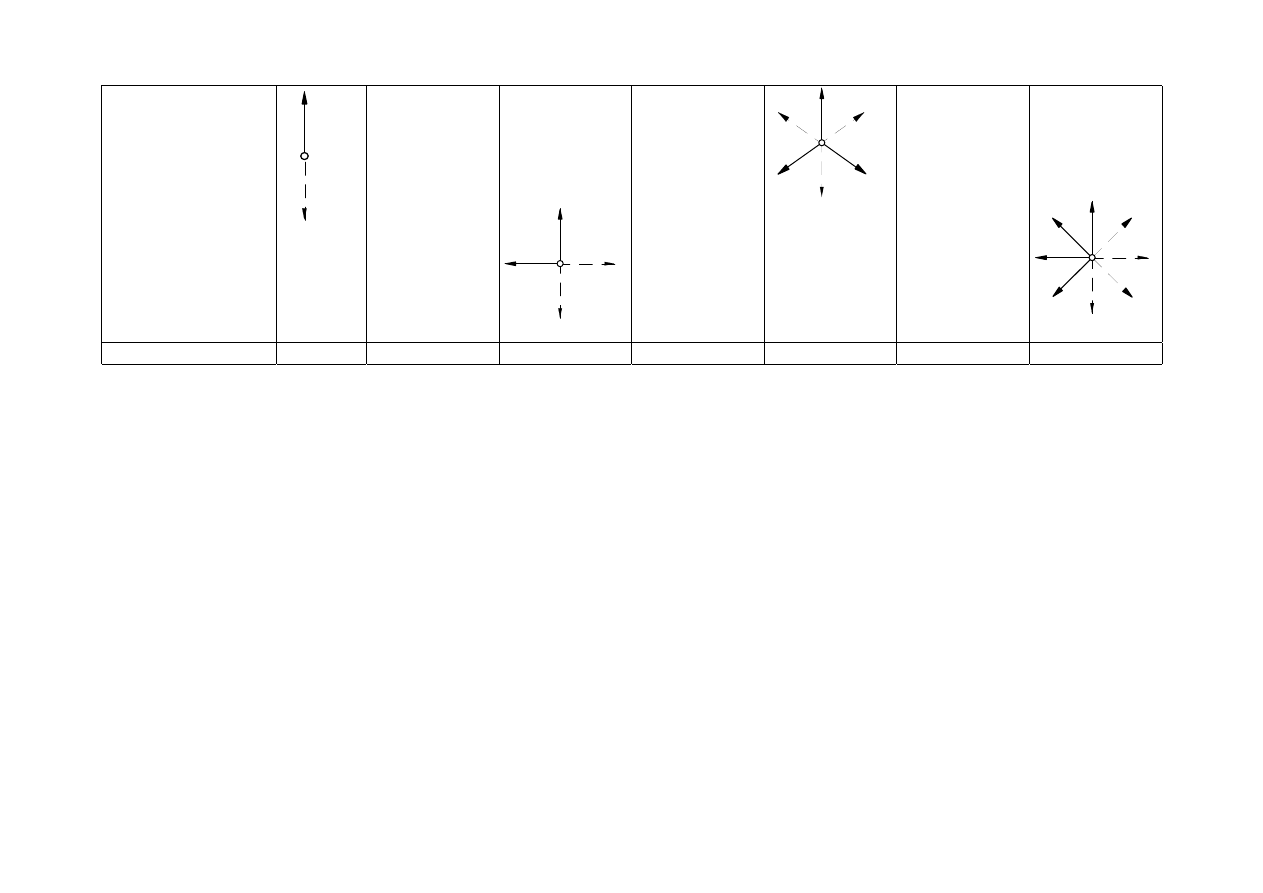
W tablicy 1 przedstawiono położenia wektora strumienia stojana w przedziale 360° elektrycznych (czyli
dla pełnego cyklu komutacji) w zależności od liczby uzwojeń sterowania i liczby taktów komutacji.
Wartość skoku wektora strumienia stojana dla jednego taktu w stopniach elektrycznych wynosi:
k
e
°
=
Θ
360
(2)
Silniki skokowe mają prawie wyłącznie wirniki wielobiegunowe (p>l) i wówczas skok mechaniczny (tj.
kąt obrotu wirnika przy przejściu z jednego taktu do następnego) wynosi:
p
k
e
⋅
°
=
Θ
360
(3)
- -
6
Przez zasilanie uzwojeń sterujących 1,2 prądem o nierównej wartości możliwe jest uzyskanie dodatkowych położeń kątowych wirnika w danym
takcie. Taki sposób sterowania określany jest jako praca z mikroskokami (rys.7).
rys. 7 Praca z mikroskokami.
Tabela 1
Liczba uzwojeń sterowania
2
3
4
5
6
7
8
Położenie wektora
strumienia stojana w
przedziale 360
st.elektrycznych przy
komutacji stałobiegunowej
+1
+2
+1
+3
+2
+1
+3
+2
+4
+1
+3
+2
+4
+5
+1
+3
+2
+4
+5
+6
+1
+3
+2
+4
+5
+6
+7
+1
+3
+2
+4
+5
+6
+7
+8
Liczba uzwojeń sterowania 1
2
3
4
- -
7
Położenie wektora
strumienia stojana w
przedziale 360
st.elektrycznych przy
komutacji
przemiennobiegunowejobi
egunowej
+1
-1
+1
-1
+2
-2
+1
+2
-3
-1
+3
-2
+1
+3
+2
+4
-1
-2
-3
-4
Liczba taktów komutacji k 2
3
4
5
6
7
8
- -
8
Zwiększenie liczby par biegunów przy stałej średnicy wirnika jest ograniczone
możliwościami technologicznymi i zwiększeniem strumieni rozproszenia między biegunami
wirnika. Zwykle p = 4...6. Zwiększenie liczby uzwojeń sterowania powoduje (przede
wszystkim) konieczność zastosowania bardziej skomplikowanego komutatora i dlatego
zwykle m = 2...4. W związku z powyższymi ograniczeniami w silniku skokowym o wirniku
czynnym wartość skoku mechanicznego
θ jest zwykle rzędu dziesiątków stopni.
Zatrzymywanie się wirnika następuje z pewnym błędem kątowym, zwanym statycznym
błędem kątowym, łownym kątowi niezgodności położenia .podłużnej osi d wirnika z osią
wypadkową pola stojana.
Wadami magnetoelektrycznych silników skokowych są niska częstotliwość pracy i niska
częstotliwość rozruchowa silnika. Niska częstotliwość pracy wywołana jest:
- dużym momentem bezwładności wirnika z uwagi na duży ciężar i masywność magnesu
trwałego,
- długimi drogami kątowymi odpowiadającymi jednemu skokowi.
3. Silnik skokowy reluktancyjny (o wirniku biernym)
Silniki reluktancyjne mają uzębiony wirnik (bierny) wykonany z blach elektrotechnicznych.
Mają one prostsza budowę od magnetoelektrycznych, ale są dużo trudniejsze do wykonania
Zaletą tych silników jest większa od magnetoelektrycznych częstotliwość pracy (małe kąty
dla jednego skoku). Zastosowanie silników skokowych reluktancyjnych jest ograniczone ze
względu na gorsze od magnetoelektrycznych. pozycjonowanie związane z dużymi
kołysaniami wirnika wokół położenia równowagi. Jednym ze sposobów zmniejszenia kołysań
jest stosowanie pracy dwóch pasm sterujących w każdym takcie. Należy podkreślić, ze na
dokładność pracy silnika skokowego (zwłaszcza reluktancyjnego) zdecydowany wpływ ma
dokładność wykonania obwodu magnetycznego i uzwojeń.
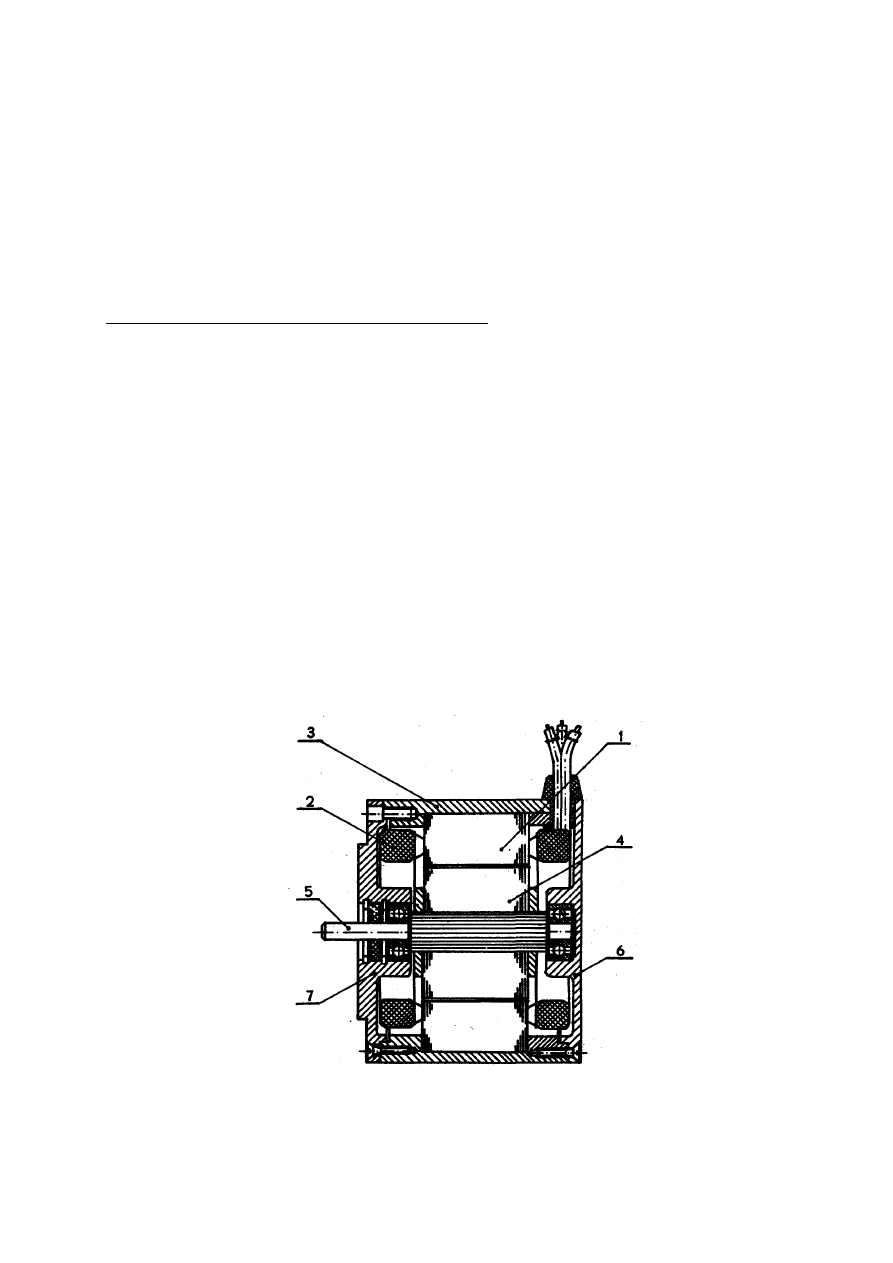
Przykładowa konstrukcja silnika skokowego reluktancyjnego przedstawiono na rys.8.
rys. 8 Przekrój podłużny silnika skokowego reluktancyjnego EDS-10: 1 - blachowany stojan,
2 - uzwojenie stojana, 5 - korpus stalowy, 4 - blachowany wirnik, 5 - wałek wirnika,
6, 7 - tarcze łożyskowe
- -
9
Model silnika skokowego, reluktancyjnego jest przedstawiony na rys.9a. Stojan (w tym
przypadku sześciobiegunowy) podobny jest do stojana silnika skokowego, o wirniku
czynnym (rys.2a).
a)
b)
rys. 9 Model silnika skokowego reluktancynnego (a) i schemat jego uzwojeń sterujących (b)
Wirnik o biegunach wydatnych wykonany jest w tym przypadku jako czterobiegunowy.
Działanie silnika skokowego wirniku biernym reluktancyjnym jest podobne jak silnika
skokowego o wirniku czynnym, z tą tylko różnicą, że wirnik reluktancyjny nie rozróżnia
zmiany kierunku wektora strumienia stojana o 180° elektrycznych. Położenie wirnika będzie
jednak zawsze takie, aby zapewnić największą przewodność na drodze strumienia. Zasadę
działania silnika skokowego o wirniku reluktancyjnym zilustrowano na rys.10.
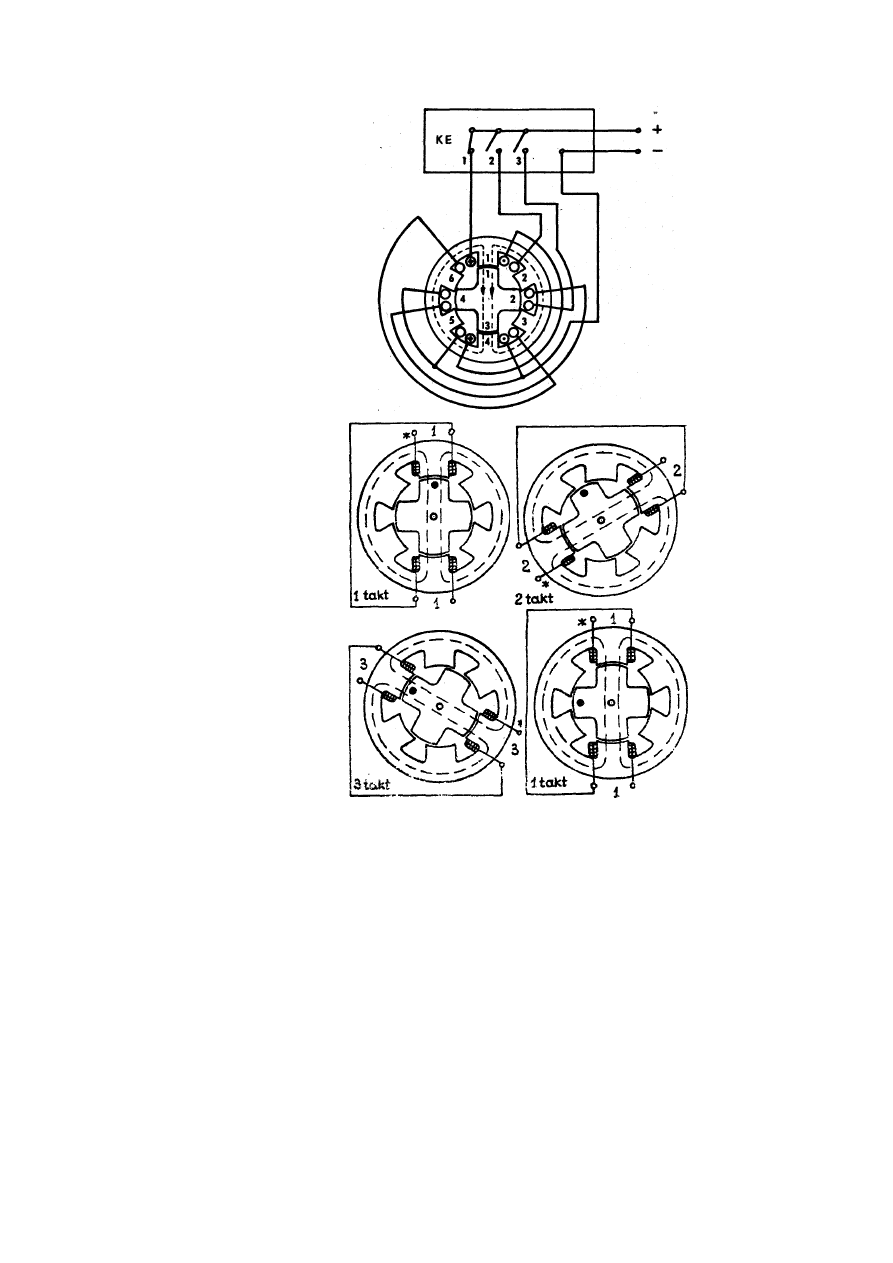
Komutator sterujący pracą silnika skokowego załącza napięcia sterujące na poszczegó1ne
pasma (uzwojenia) sterujące silnika według zaprogramowanej kolejności. Uzębiony wirnik
przy każdym kolejnym załączeniu pasma sterującego zajmuje takie położenie, aby zapewnić
strumieniowi magnetycznemu drogę o największej przewodności. Idea realizowania ruchu
obrotowego wirnika w postaci skoków jest przedstawiona na rys.10a. Schemat przedstawia
stojan z trzema pasmami sterującymi, którego kolejne bieguny ponumerowano od 1 do 6, oraz
wirnik reluktancyjny o czterech zębach ponumerowanych. od 1 do 4. Jeśli komutator
przedstawiony na rys.6a w postaci trójbiegunowego włącznika poda napięcie sterujące na
pasmo sterujące 1, to wirnik zajmuje wówczas położenie takie, że jego zęby 1 i 5 ustawiają
się zgodnie z biegunami stojana 1 i 4 (rys.10b). Jeżeli następnie napięcie sterujące zostanie
doprowadzone do cewek pasma 2 przy jednoczesnym odłączenia od napięcia cewek
uzwojenia pasma 1, to wirnik zajmie położenie takie, ze jego zęby 2 i 4 pokryją się
odpowiednio z biegunami stojana 2 i 5. Wirnik przesunie się zatem o jeden skok w lewo.
Takie położenie wirnika jest najbliższym położeniem zapewniającym maksymalna
przewodność drogi strumienia magnetycznego (maksymalna permeancję). Jeżeli zgodnie z
powyższa zasada zmieniać zasilanie pasm sterujących, według cyklu 1, 2, 3, 1, 2... ltd., to
wirnik zacznie skokowo realizować ruch. obrotowy w lewo. Przy zmianie kolejności
podawania napięcia sterującego na pasma sterujące silnika według taktu 1, 3, 2, 1, 3... itd.,
wirnik zmieni kierunek ruchu na przeciwny.
Wartość kąta obrotu wirnika dla jednego skoku wyrażona dpowiednio w stopniach.
α
0
i
radianach
α wynosi:
gdzie: m - liczba faz uzwojeń sterujących, Z
R
- liczba zębów wirnika.
- -
10
a)
b)
rys. 10 Zasada pracy silnika skokowego reluktancyjnego trójfazowego przy komutacji
symetrycznej (punktem oznaczono we wszystkich przypadkach ten sam występ wirnika).
Liczbę taktów silnika skokowego reluktancyjnego określa się na podstawie wzoru (1), przy
czym należy przyjmować n
2
= 1 tak dla komutacji stało jak i przeniennobiegunowej (gdyż jak
wspomniano zmiana kierunku pola o 180° nie wpływa na położenie wirnika). Wzory (2) i (3)
pozostają prawdziwe, jeżeli zamiast liczby par biegunów p podstawić liczbę występów
biegunów wirnika.
Wirnik silnika skokowego przedstawionego na rys.10 (dla tego silnika k=3,
θ
e
=120°,
θ=30°)
wykona pełen obrót po czterech cyklach komutacji.
Wirnik silnika skokowego reluktancyjnego może mieć znacznie więcej biegunów niż wirnik o
magnesach trwałych. W granicznym przypadku można otrzymać wirnik równomiernie
użłobkowany. Jeżeli dodatkowo wykonać żłobki na jawnych biegunach stojana to otrzymuje
się tzw. silnik skokowy reduktorowy (rys.11).
- -
11
rys. 11 Model silnika skokowego reduktorowego
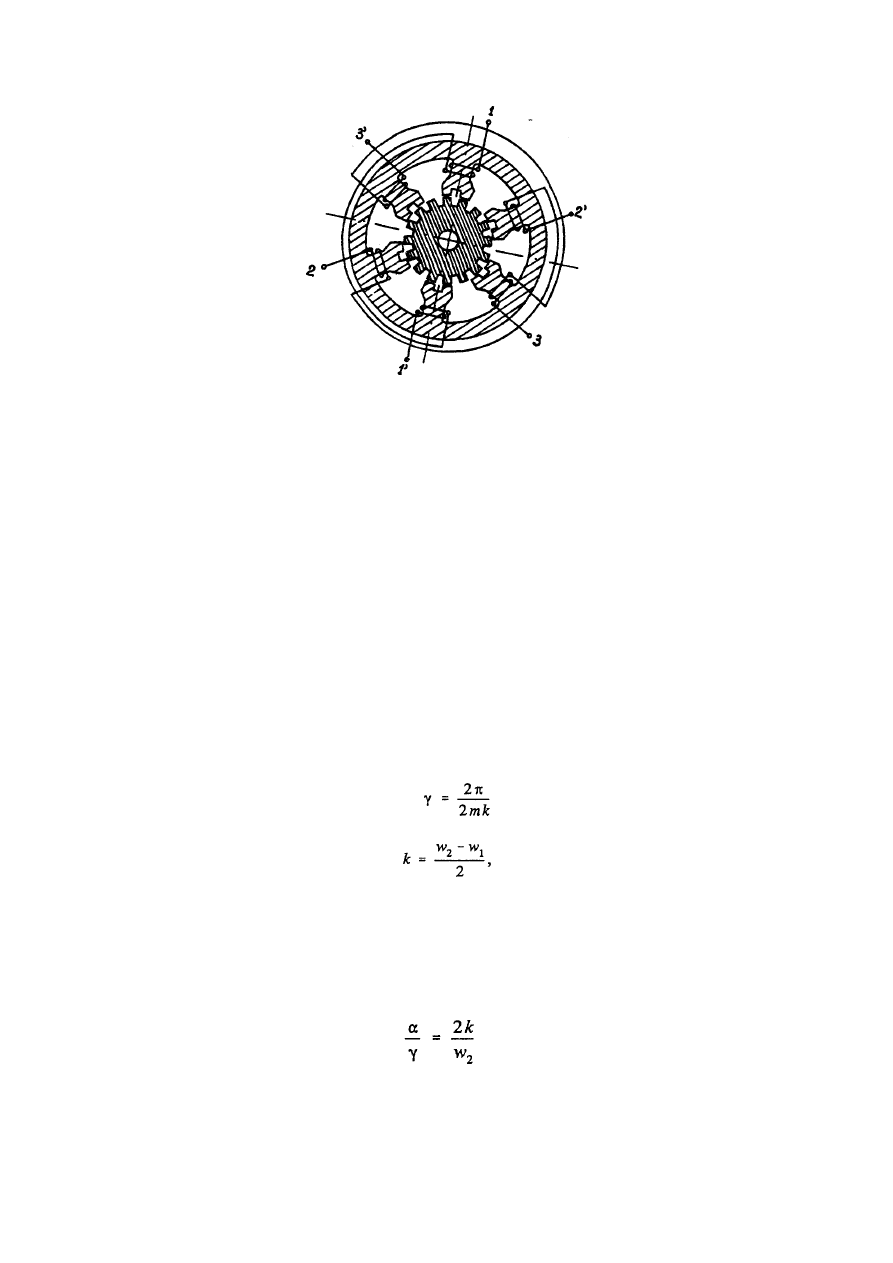
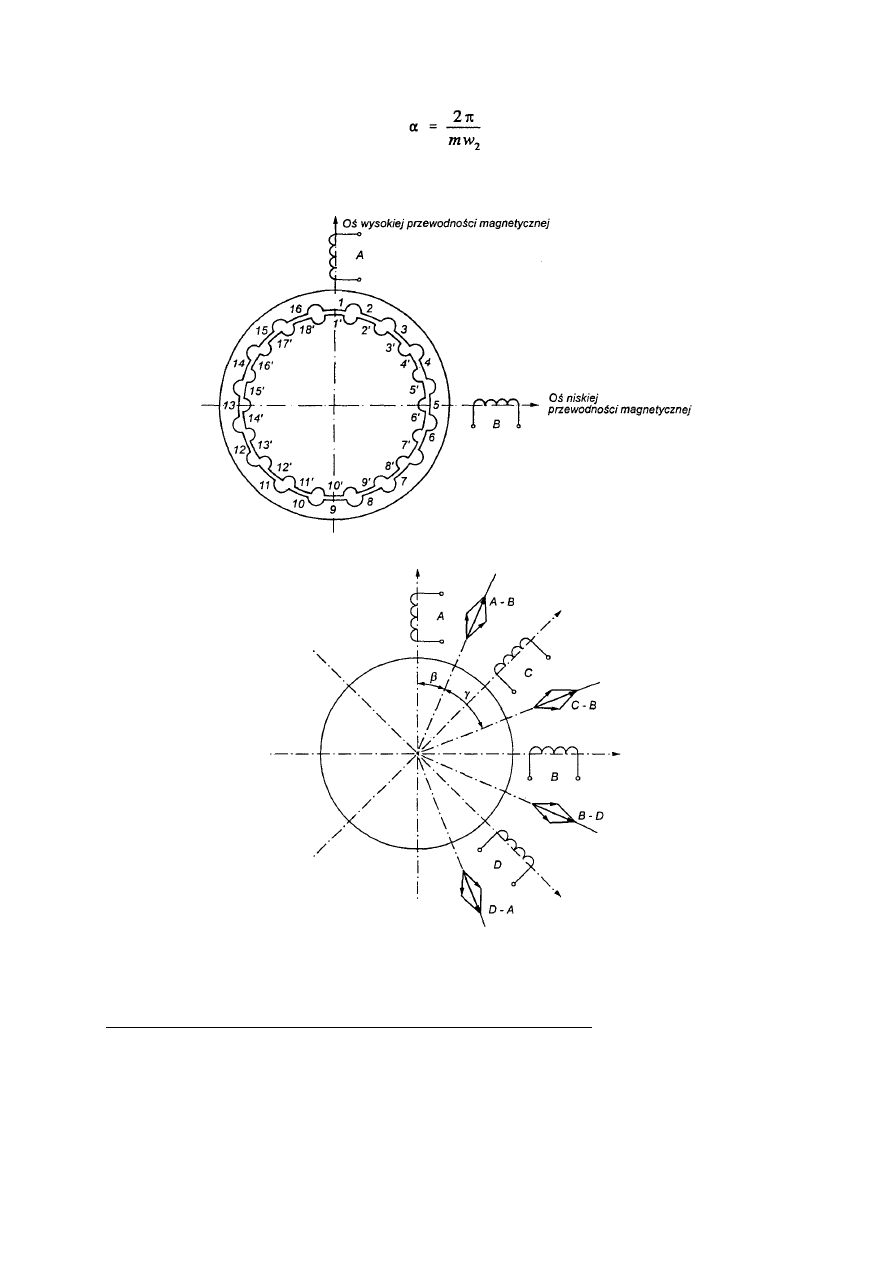
Silniki reluktancyjne budowane są zwykle w formie zilustrowanej na rys.12. Przedstawione
na rysunku ukształtowanie zębów (biegunów) stojana i wirnika narzuca konieczność
zastosowania oprócz faz A i B dwóch dodatkowych faz: C i D o osiach magnetycznych,
pokazanych na rys.13.
Silnik taki ma nierówna liczbę zębów na obwodzie stojana i wirnika - w przedstawionym
przypadku 18 i 16. Przy ustawieniu wirnika, jak to pokazuje rys.12, oś maksymalnej
przewodności magnetycznej pokrywa się z osią uzwojenia A (ustawienie ,,ząb na ząb"),
natomiast oś minimalnej przewodności magnetycznej pokrywa się z osią magnetyczna
uzwojenia B (ustawienie ząb na ,,żłobek"). Jeśli zasilimy fazę A i C, wypadkowe pole
magnetyczne stojana przyjmie pozycję oznaczoną katem
β na rys.13 i spowoduje niewielki
obrót wirnika w prawo tak, aby zęby 2 i 2' pokryły się tworząc oś maksymalnej
przewodności. Podobnie, gdy zasilimy fazy C i B, pole magnetyczne przesunie się o kąt
γ i
spowoduje ruch silnika w prawo o 1/4 podziałki zębowej tak, ze zęby 4 i 4' pokryją się,
tworząc oś maksymalnej przewodności magnetycznej.
Jak widać, skok pola jest znaczny, natomiast skok wirnika niewielki. Następuje w tym
przypadku redukcja obrotu wirnika w stosunku do skoku pola. Aby wyznaczyć stopień
redukcji obrotu wirnika silnika określamy kąt skoku pola
przy czym: wartość k wyznacza się z równości
gdzie:
w
1
i w
2
- liczby zębów odpowiednio: stojana i wirnika, m - liczba faz silnika.
Najkorzystniejszy stopień redukcji uzyskuje się dla k = 1. Stosunek skoku wirnika do skoku
pola magnetycznego (inaczej skoku osi maksymalnej przewodności magnetycznej)
nazywamy przełożeniem silnika, i wynosi ona:
przy czym: a - długość kątowa skoku wirnika.
Ogólna zależność określająca kątowa długość skoku ma postać:
- -
12
przy czym: m - liczba faz silnika.
rys. 12 Kształt blach stojana i wirnika silnika reluktancyjnego - reduktorowego
rys. 13 Układ przestrzenny faz i kierunek działania przepływów magnetycznych w
czterofazowym silniku reluktancyjnym - reduktorowym
Silniki reluktancyjne reduktorowe mogą osiągać skoki bardzo małe, nawet ułamków stopnia.
Silniki skokowe reluktancyjne charakteryzują się cennymi zaletami, a mianowicie:
1) możliwością pracy z dużymi częstotliwościami i krótkimi skokami,
2) zwarta i trwałą konstrukcją,
3) prostym sposobem produkcji i niskim kosztem produkcji,
4) brakiem części iskrzących.
- -
13
Podstawową wadą silników reluktancyjnych jest tendencja do kołysań wirnika wokół
położenia równowagi po wykonaniu skoku. Aby wyeliminować tę wadę należy stosowa
specjalne układy tłumiące.
4. Silniki hybrydowe
Połączenie zalet obu opisanych silników skokowych niesie konstrukcja silników
hybrydowych, które zgodnie z tą nazwą są niejako połączeniem silnika magnetoelektrycznego
z reluktancyjnym.
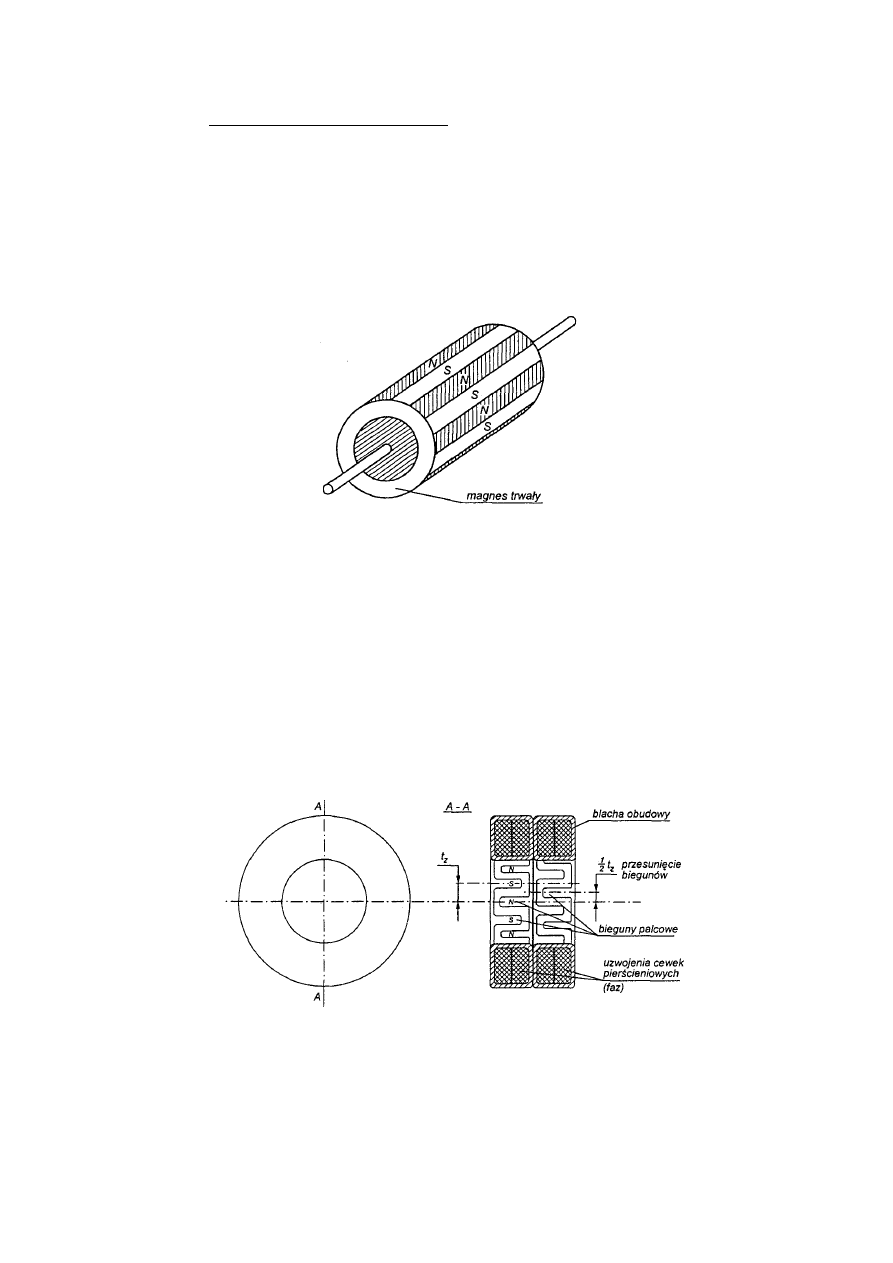
rys. 14 Schematyczne przedstawienie wirnika silnika hybrydowego
Wirnik tego silnika stanowi cylindryczny wielobiegunowy magnes trwały - rys.14. Wirnik
jest namagnesowany promieniowo i w tym przypadku ma 12 par biegunów na swym
obwodzie. Stojan silnika złożony jest z dwóch identycznych części rozmieszczonych jak
pokazano na rys.15. Każda z części stojana składa się z zewnętrznej blachy ze stali miękkiej
magnetycznie, zwiniętej w kształt pierścienia o przekroju prostokątnym, przy czym
wewnętrzna po-wierzchnia blachy wycięta jest w kształt biegunów ,,palcowych". Wnętrza
każdego pierścienia wypełniają po dwie cewki pierścieniowe nawinięte bifilarne. Zasilając
jedną z cewek części pierwszej, bieguny palcowe tej części stojana przyjmują biegunowość
pokazana na rys.15. Zasilając cewkę drugą napięciem o takiej samej biegunowości co
poprzednio, otrzymamy przeciwną biegunowość palcowych biegunów magnetycznych.
rys. 15 Schemat stojana silnika skokowego — hybrydowego
Istotna cecha konstrukcji jest przesuniecie w przestrzeni usytuowania biegunów palcowych
jednej i drugiej części stojana o pół podziałki zębowej (l/2tz).
- -
14
5. Stan pracy statycznej - moment obrotowy silnika skokowego
Praca statyczna silnika skokowego ma miejsce wtedy, gdy prąd w uzwojeniach sterujących
silnika ma wartość ustaloną. Ten rodzaj pracy określa charakterystyka statycznego momentu
synchronizującego, która przedstawia moment silnika przeciwdziałający siłom zewnętrznym
wychylającym wirnik z położenia równowagi.
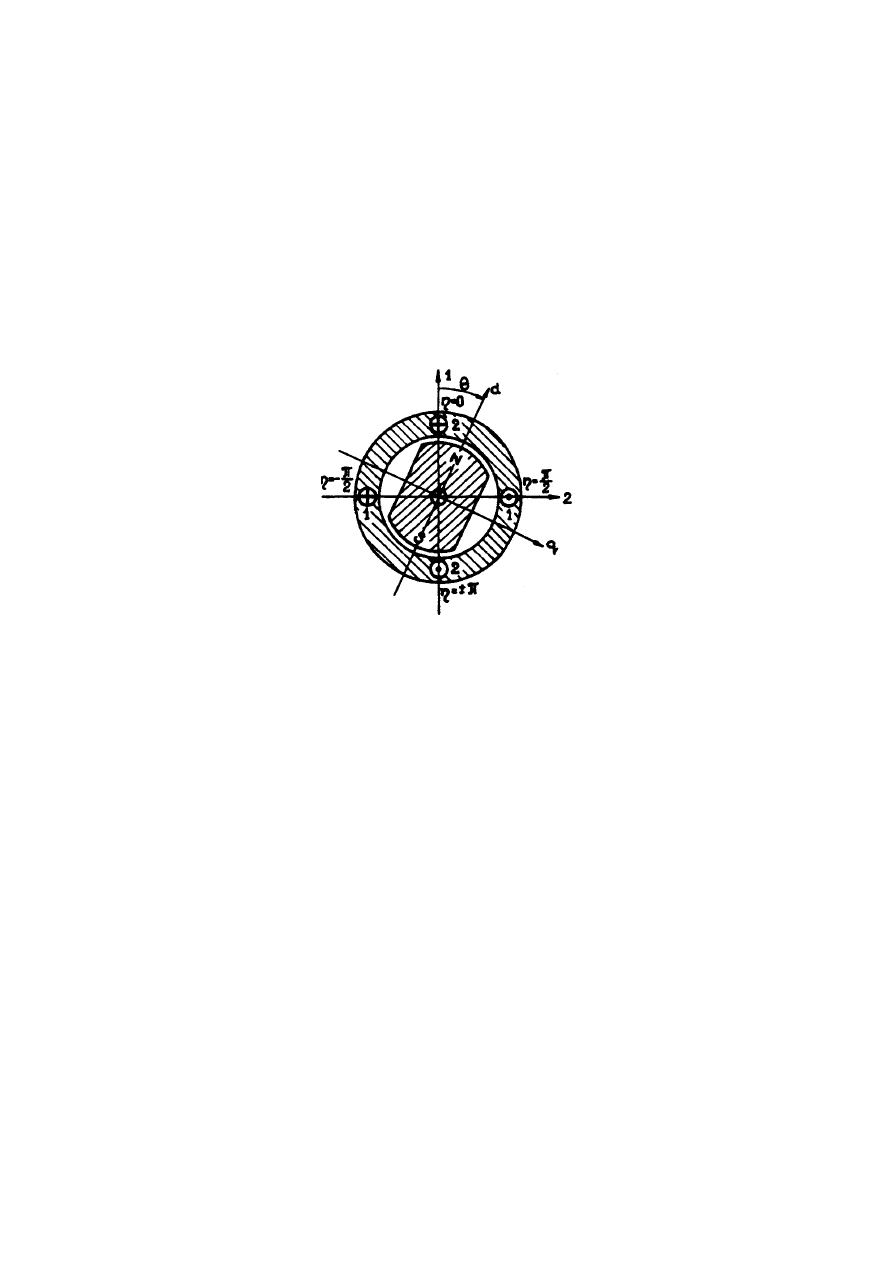
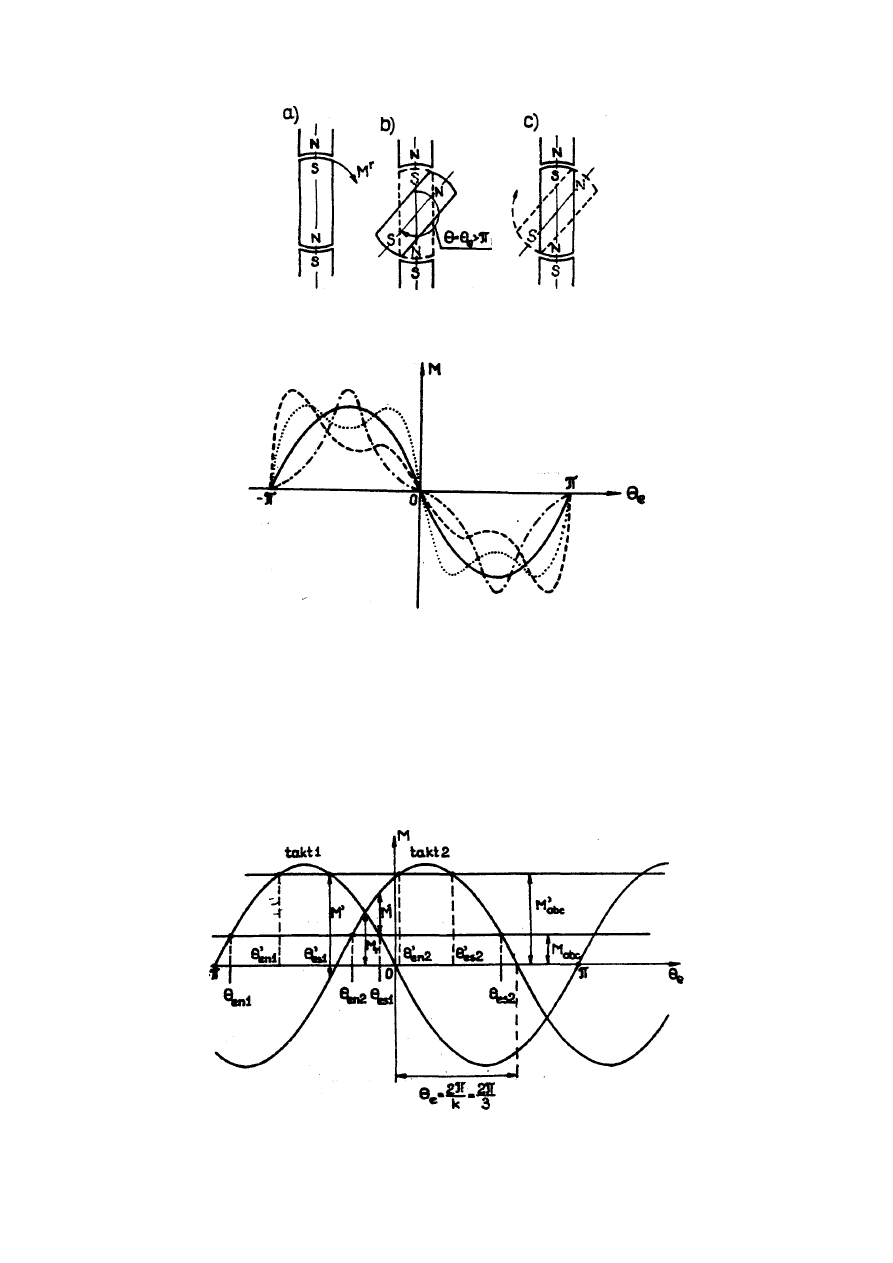
Zasada powstawania i charakter momentu obrotowego silnika skokowego zostaną wyjaśnione
na przykładzie modelu maszyny o dwóch jednakowych cewkach skupionych na stojanie oraz
o wirniku czynnym dwubiegunowym (rys.16). Dla uproszczenia analizy zakłada się, że
indukcja w szczelinie powietrznej pochodząca od wzbudzenia wirnika ma rozkład
kosinusoidalny względem podłużnej osi d wirnika. Dodatkowo wprowadza się pojęcie
współrzędnej bieżącej obwodu stojana q, która liczona jest od osi 1 uzwojenia 1 stojana.
rys. 16Model silnika skokowego dwufazowego o wirniku czynnym
Położenie wirnika względem stojana określone jest przez kat
θ zawarty między osią 1
uzwojenia 1 stojana a osią podłużną d wirnika. Liczba zwojów jednego uzwojenia stojana
wynosi z.
W stanie ustalonym każdej kombinacji włączenia uzwojeń (dla której pod wpływem stałego
napięcia U popłynie w uzwojeniu prąd I wytwarzając przepływ Iz ) odpowiada pewien stan
elektryczny, scharakteryzowany ściśle określonym rozkładem przestrzennym pola
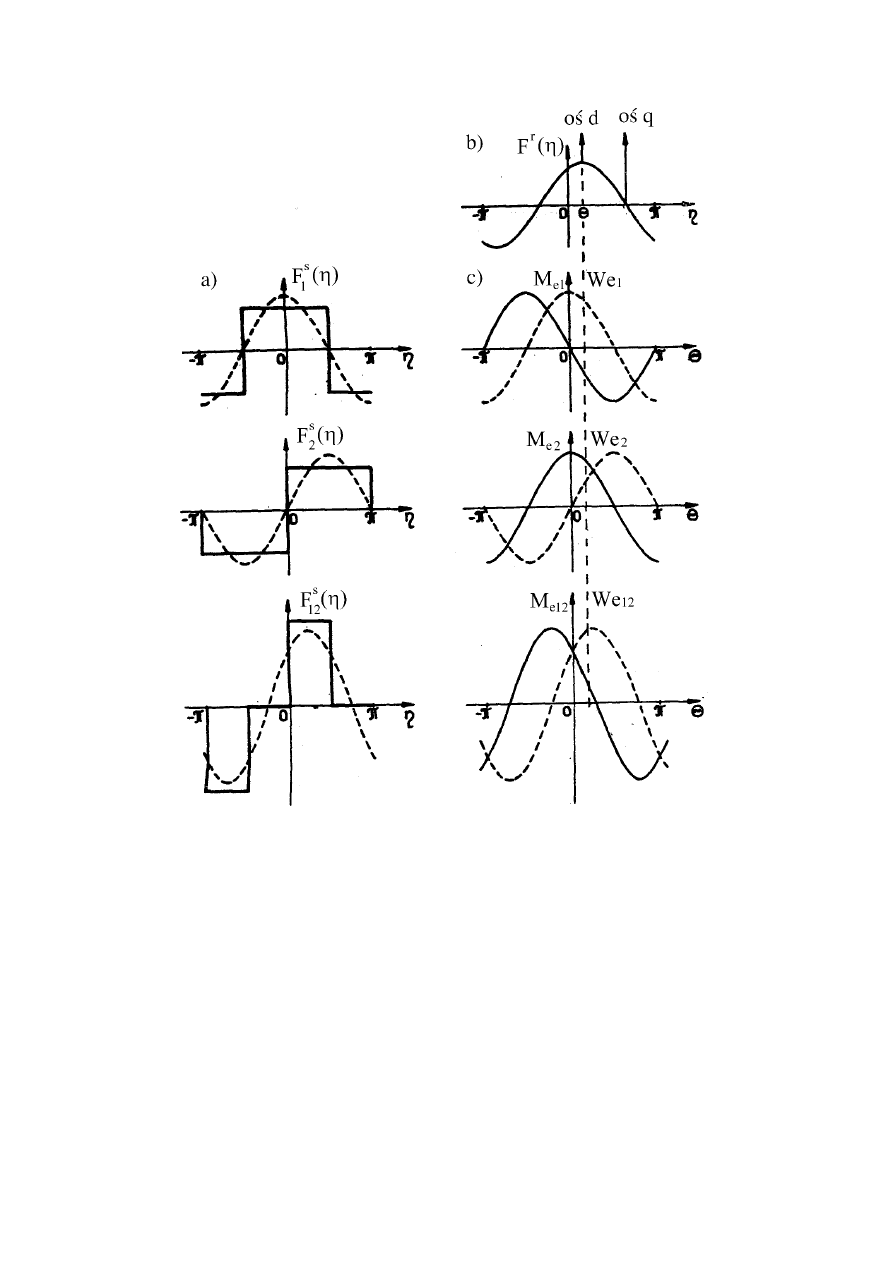
elektromagnetycznego stojana. Na rys.17a przedstawiono rozkład przestrzenny siły
magnetomotorycznej F
S
bieguna stojana i jej pierwszej harmonicznej dla trzech kolejnych
stanów elektrycznych:
a) rozkład przestrzenny siły magnetomotorycznej,
rzeczywisty ———— pierwsza harmoniczna - - - - - - - - -
b) rozkład indukcji pochodzącej od wzbudzonego wirnika
c) przebieg momentu pochodzenia elektrycznego —————
rozkład energii układu - - - - - - - - -
Jak widać rozkład ten zależy tylko od tego jaki w danej chwili występuje stan elektryczny
(takt).
- -
15
rys. 17 Ilustracja zjawisk zachodzących w modelu silnika skokowego z rys.10 dla trzech
stanów elektrycznych:
6. Charakterystyka kątowa silnika skokowego. Stabilność i warunki wykonania
pojedynczego skoku
Charakterystyką kątową silnika skokowego nazywa się zależność statycznego momentu
synchronicznego działającego na wirnik od kąta określającego położenie wirnika względem
stojana.
W celu uogólnienia wniosków rozpatrzona zostanie charakterystyka kątowa silnika dla
którego p<6. Przykładem takiego silnika może być model przedstawiony na rys.9.
Charakterystyka kątowa tego silnika została przedstawiona na rys.18 rys.
Na podstawie charakterystyki kątowej można stwierdzić jednoznacznie jakie siły działają na
wirnik dla danego położenia 0 oraz dla określonego stanu elektrycznego uzwojeń. Siły te
starają się sprowadzić wirnik do stanu równowagi, tzn.
- -
16
rys. 18 Charakterystyka kątowa silnika skokowego reluktancyjnego trójfazowego o czterech
zębach na wirniku
takiego w którym momenty działające na wirnik równoważą się. Jeżeli na wirnik nie działa
moment zewnętrzny (stan jałowy), to punkty równowagi wyznaczone są przez przecięcie
krzywej momentu z osią odciętych.
Część charakterystyki kątowej dla której energia układu jest dodatnia (porównaj rys.17c) nosi
nazwę gałęzi stabilnej, natomiast pozostała część dla której energia układu jest ujemna nosi
nazwę gałęzi niestabilnej. Przykładowo dla charakterystyki z rys.18 gałąź stabilna to część
charakterystyki dla
)
2
,
2
(
e
π
+
π
−
∈
θ
, a gałąź niestabilna dla
)
2
3
,
2
(
e
π
+
π
+
∈
θ
.
Punkty równowagi występujące na części stabilnej charakterystyki kątowej noszą nazwę
punktów równowagi stabilnej (dla stanu jałowego zwanych zerami stabilnymi), a występujące
na części niestabilnej noszą nazwę punktów równowagi niestabilnej (zer niestabilnych).
W przedziale 360° elektrycznych występuje zawsze tylko jeden punkt równowagi stabilnej i
jeden równowagi niestabilnej, natomiast przy obrocie wirnika o 360° (geometrycznych)
wystąpi zawsze z
r
(lub p dla wirnika czynnego) punktów równowagi stabilnej i tyleż
niestabilnej.
Wirnik powróci do wyjściowego punktu równowagi stabilnej (np.
θ = 0) po zaniku momentu
zewnętrznego tylko wtedy, gdy wartość bezwzględna jego wychylenia nie przekroczyła jednej
podziałki biegunowej lub jednego półokresu momentu synchronizującego, czyli gdy
r
z
π
=
θ
(
lub
p
π
=
θ
) tzn. gdy
π
<
θ
e
.
Jeżeli wychylenie wirnika od punktu równowagi, stabilnej wynosi
π
>
θ
e
to wirnik, po
zaniku sił zewnętrznych znajdzie się w innym niż wyjściowy punkcie równowagi statycznej.
Jeżeli natomiast wychylenie wirnika wynosi
π
=
θ
czyli gdy znajdzie się dokładnie w
punkcie równowagi niestabilnej, to po zaniku sił zewnętrznych wirnik z jednakowym
prawdopodobieństwem powróci do wyjściowego lub innego sąsiedniego punktu równowagi
stabilnej.
- -
17
rys. 19 Wymuszenie wychylenia wirnika czynnego silnika skokowego o p = 1: a) stan
początkowy; b) położenie wirnika odpowiadające danemu momentowi M1
c) stan po zaniku momentu M1
rys. 20 Typowe kształty charakterystyk kątowych silnika skokowego o zębach
symetrycznych.
Wszystkie rozważania przeprowadzone dotychczas w tym punkcie dotyczyły zjawisk dla
jednego (i stałego) stanu elektrycznego uzwojeń. Obecnie rozpatrzone zostaną zjawiska przy
przejściu z jednego stanu elektrycznego do następnego. Dla uproszczenia pomija się
elektromagnetyczną stałą czasową uzwojeń stojana jako znikomo małą w porównaniu z
elektromechaniczną stałą czasową wirnika. Inaczej mówiąc w czasie, gdy ustali się nowy stan
elektryczny uzwojeń stojana wirnik pozostanie jeszcze w poprzednim punkcie równowagi
stabilnej.
rys. 21Charakterystyka kątowa silnika skokowego reluktancyjnego trójfazowego o czterech
zębach na wirnika dla dwóch kolejnych taktów komutacji.

- -
18
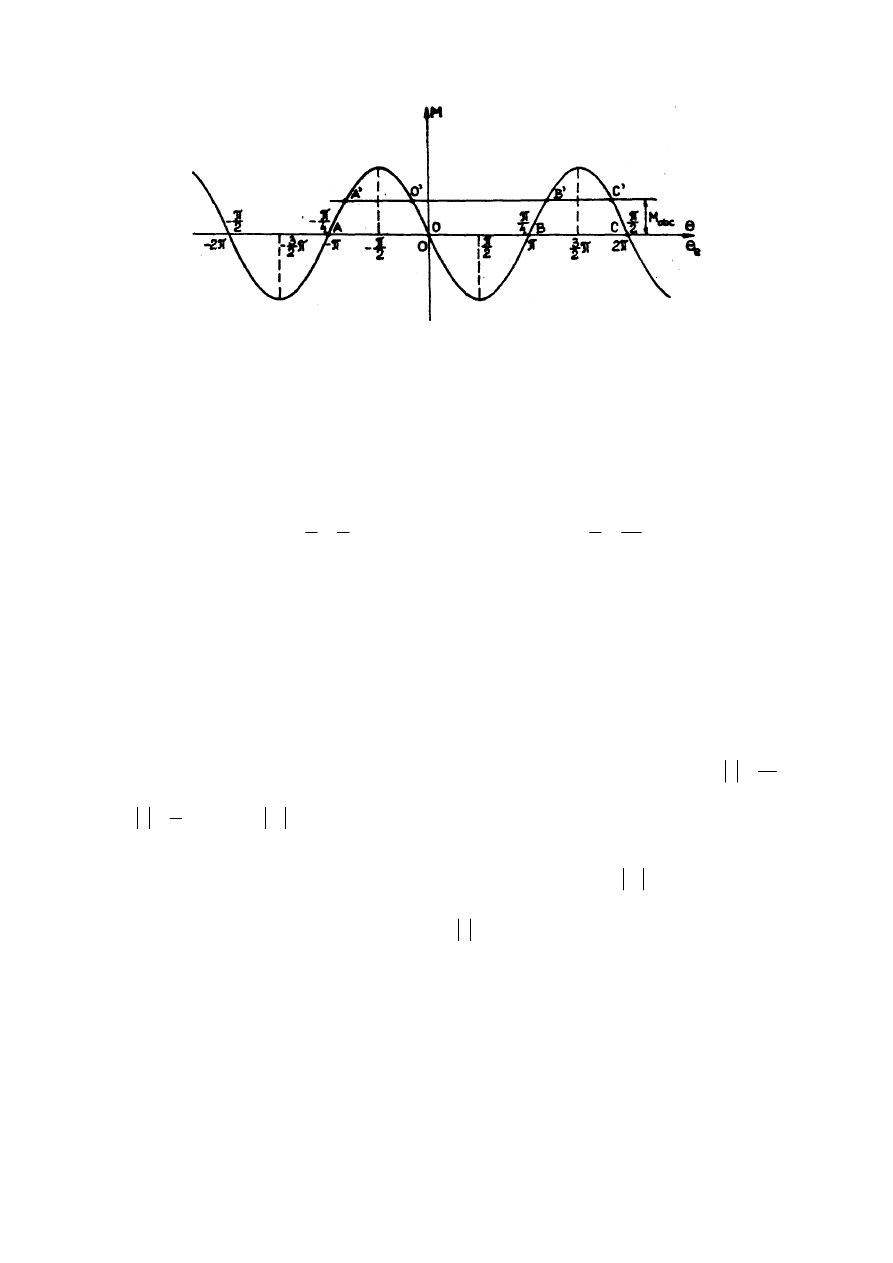
Na rys.21 przedstawiono wykresy momentów pochodzenia elektrycznego dla dwóch
kolejnych taktów komutacji silnika z rys.9. Punkt
θ = 0 określa położenie stabilne wirnika
silnika nieobciążonego dla pierwszego taktu komutacji. Przy przejściu z jednego taktu do
następnego wektor siły magnetomotorycznej (a tym samym i charakterystyka momentu)
wykona skok o kąt
k
2
e
π
=
θ
. Załóżmy, że silnik obciążony jest dodatnim momentem
zewnętrznym Mobc . Wówczas współrzędne punktów stabilnego i niestabilnego dla taktu 1 są
odpowiednio
θes1 = θen2 natomiast dla taktu 2 (w chwili ustalenia się stanu elektrycznego
odpowiadającego temu taktowi)
θes2 = θes1 + 2π/k i θen2 = θen1 + 2π/k. A więc
współrzędne nowych punktów równowagi przesunięte są o wartość skoku elektrycznego w
kierunku dodatnich kątów
θe. Dla stanu 2 wirnik znajdzie się w strefie stabilnej nowej
charakterystyki kątowej (bo
θes1 leży wewnątrz tej strefy) i pod wpływem momentu M
przejdzie do nowego punktu równowagi stabilnej
θes2 dokładniej mówiąc skoczy o ten sam
kąt i w tę samą stronę co wektor siły magnetomotorycznej. Taki przebieg zjawisk jest
charakterystyczny dla prawidłowej pracy silnika skokowego. Gdyby silnik skokowy
obciążony był momentem M’obc > Mobc (tak jak na rys.21), to dla taktu 2 wirnik znalazłby
się w strefie niestabilnej nowej charakterystyki i pod wpływem momentu M’ wykonałby skok
w przeciwną stronę i o inną wartość niż wektor siły magnetomotorycznej. A więc nie
zareagowałby poprawnie na sygnał sterujący.
Granicznym przypadkiem obciążenia silnika jest taka wartość Mobc jaka wynika z przecięcia
się charakterystyk kątowych dla kolejnych taktów. Moment ten nazywany jest momentem
rozruchowym Mr, a prawidłowy skok silnika skokowego odbędzie się tylko wówczas, gdy
Mr
Mobc
≤
. Z powyższych rozważań wynikają warunki wykonania pojedynczego skoku tak
dla silnika obciążonego jak i nieobciążonego.
Obrót wirnika w zadanym kierunku i wykonanie prawidłowego skoku możliwe jest tylko w
takim przypadku, gdy jego wyjściowe położenie stabilne
θes1 zawiera się w granicach strefy
stabilnej dla nowego taktu, czyli gdy
θes1 > θen2.
7. Charakterystyki mechaniczne silników skokowych
Właściwości napędowe silników skokowych scharakteryzowane są dwoma rodzajami
charakterystyk mechanicznych:
- charakterystyką rozruchową,
- charakterystyką pracy (graniczną).
Momentem rozruchowym silnika skokowego nazywa się maksymalny moment obciążenia
jaki może być przyłożony do silnika podczas rozruchu przy danej częstotliwości impulsów
sterujących. Jeżeli przeprowadza się rozruchy silnika skokowego przy coraz to wyższych
częstotliwościach impulsów sterujących, to można doprowadzić do takiej maksymalnej
wartości tej częstotliwości, ze po jej przekroczeniu. silnik nie rusza, bądź ruch jego nie jest
synchroniczny z impulsami sterującymi. Częstotliwość ta nosi nazwę częstotliwości
rozruchowej granicznej.
Charakterystyka rozruchowa określa zależność maksymalnego momentu, jakim może być
obciążony wał silnika, przy którym silnik jeszcze może wystartować bez gubienia skoków, od
częstotliwości powtarzania impulsów prądu zasilającego.
- -
19
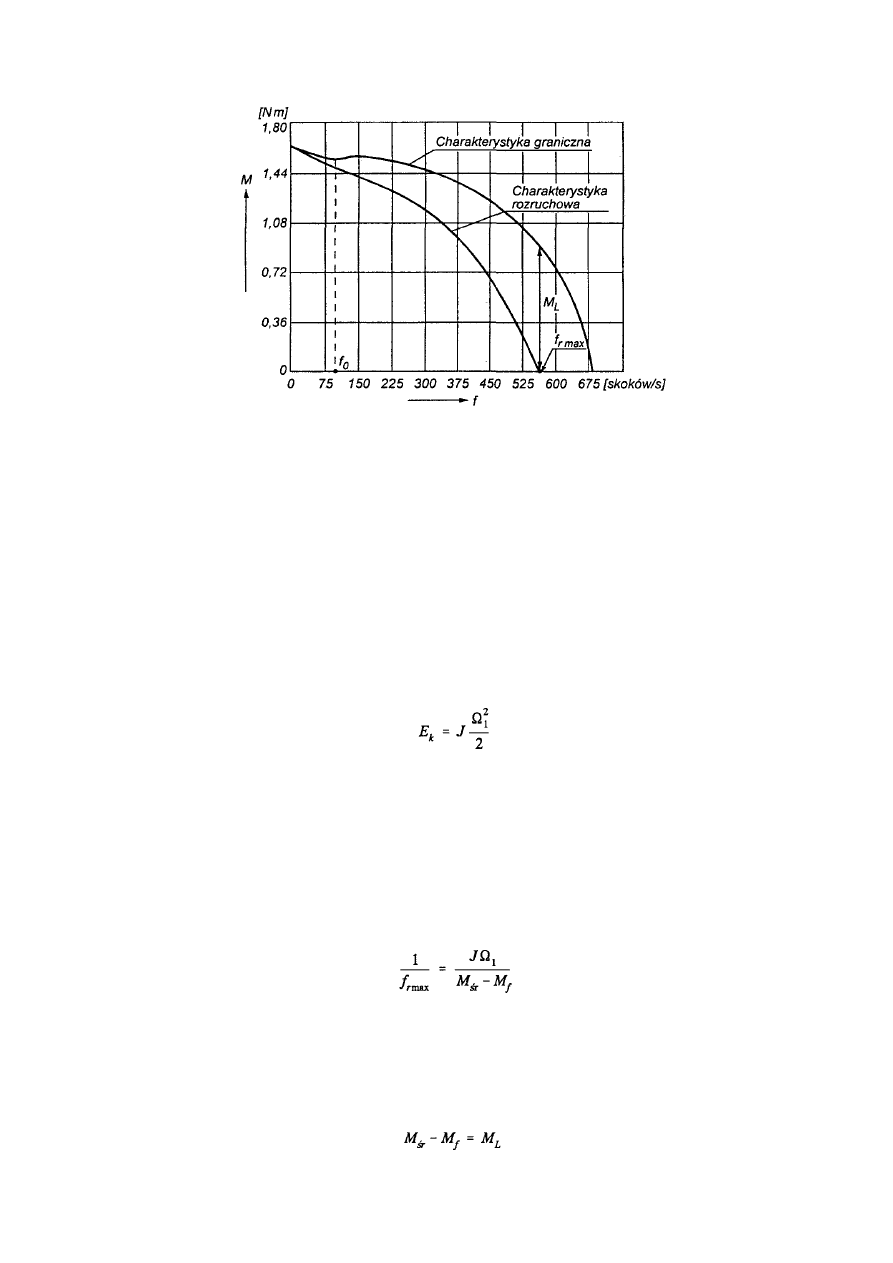
rys. 22 Przykładowy przebieg charakterystyk mechanicznych silnika skokowego
Przy małych częstotliwościach impulsów sterujących (kilkanaście Hz) występuje często
rezonans drgań własnych silnika. Może on utrudniać, a często nawet uniemożliwiać rozruch
silnika. Zjawisko to można ograniczyć przez tłumienie magnetyczne lub tarciowe.
Charakterystyka pracy, zwana także graniczna, podaje zależność maksymalnego,
dopuszczalnego momentu obciążającego silnik będący w ruchu, przy którym może on jeszcze
pracować bez gubienia skoków, od częstotliwości impulsów prądu zasilających jego fazy.
Typowe przebiegi takich charakterystyk przedstawione zostały na rys.22. Jak widać na
rysunku, charakterystyka rozruchowa leży poniżej charakterystyki pracy. Jest to
spowodowane tym, ze w sytuacji kiedy silnik jest już w ruchu, może on być bardziej
obciążony, ponieważ w chwili przełączania faz (rozpoczęcia nastopnego kroku) jego wirnik
ma nadaną pewną prędkość, czyli obdarzony jest pewną energią wynoszącą:
przy czym:
J - moment bezwładności wirnika i układu obciążenia,
Ω - prędkość kątowa wirnika w momencie włączenia kolejnego impulsu prądu.
Na przykład dla punktu maksymalnej częstotliwości rozruchu f
rmax
możemy przyjąć, że
rozwijany przez silnik moment w pierwszym skoku, całkowicie zostaje ,,zużyty" na
przyspieszenie masy wirnika i pokonanie oporów tarcia. W czasie równym l/f
rmax
zostaje
wykonany skok silnika
α, a osiągnięta prędkość przy końcu skoku może być wyznaczona z
zależności:
przy czym:
J - moment bezwładności układu, M
śr
- średni moment synchronizujący rozwijany przez
silnik przy danej częstotliwości, M
f
- moment tarcia.
Jeżeli przyjąć, że prędkość kątowa
Ω
1
będzie utrzymywana na stałym poziomie w czasie
następnego skoku, to praktycznie średni moment synchronizujący silnika będzie mógł być
wykorzystany na pokonanie przyłożonego momentu obciążenia - M
L
, czyli:
- -
20
W przebiegu charakterystyk mechanicznych uwidacznia się zwykle pewne "załamanie" w
okolicach częstotliwości f
0
- wynoszącej około 50-200Hz. Zjawisko to powodowane jest
rezonansem mechanicznym przy częstotliwości drgań własnych f
0
układu mechanicznego:
wirnik silnika-obciążenie. W punkcie tym występują znaczne kołysania wirnika wokół
położenia równowagi, co obniża możliwości obciążenia silnika momentem zewnętrznym.
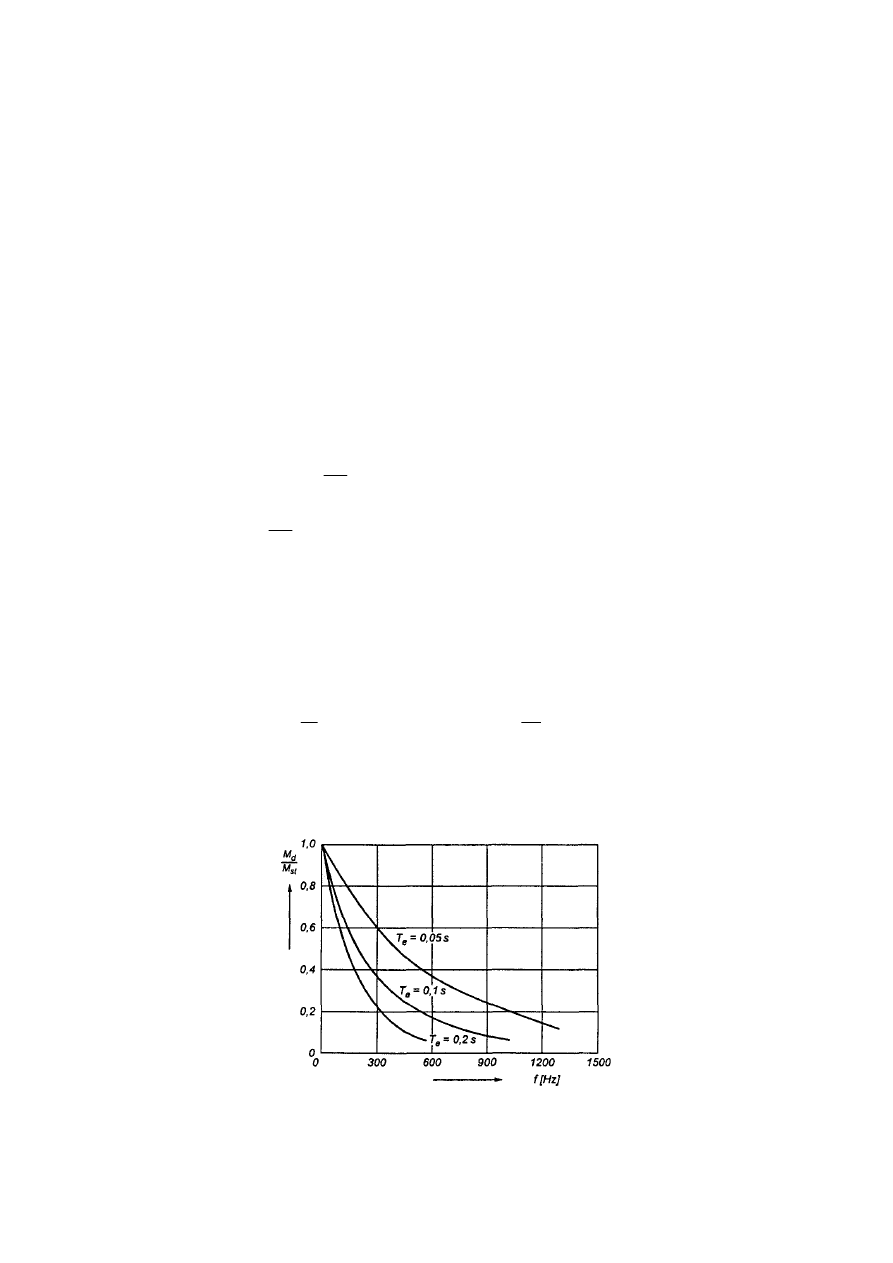
Gdy czas trwania impulsu prądowego jest znacznie dłuższy od stałej czasowej obwodu fazy
silnika można założyć, że wartość prądu średniego w czasie impulsu zasilania jest stała i
równa wartości ustalonej prądu płynącego pod wpływem napięcia zasilania.. Moment
synchronizujący obliczony przy tym założeniu nazywany jest umownie momentem
statycznym, w odróżnieniu od tzw. momentu dynamicznego, kiedy to czas trwania impulsów
prądowych jest porównywalny ze stałą czasową faz silnika.
Przepływ magnetyczny wytwarzany przez uzwojenie silnika zależy od średniej wartości
prądu w czasie trwania impulsów prądowych. Wartość chwilowa prądu w obwodzie fazy
silnika w czasie impulsu prądowego zmienia się zgodnie ze wzorem:
(
)
e
T
t
u
e
I
i
/
1
−
−
=
przy czym:
f
u
R
U
I
=
- wartość ustalona prądu fazy,
f
f
e
R
L
T
=
- elektromagnetyczna stała czasowa obwodu,
f
f
L
R ,
- rezystancja i indukcyjność obwodu fazy silnika.
Jeśli czas będziemy liczyli od początku impulsu prądowego, to przy końcu tego impulsu, po
upływie czasu t
k
, wartość prądu chwilowego wyniesie:
(
)
e
k
T
t
u
k
e
I
I
/
1
−
−
=
Wartość średnia prądu w impulsie jest natomiast równa:
(
)
(
)
−
−
=
−
=
−
−
∫
e
k
k
e
T
t
k
e
u
t
T
t
u
k
śr
e
t
T
I
dt
e
I
t
I
/
0
/
1
1
1
1
Wartość średnia prądu w impulsie jest tym mniejsza w stosunku do wartości ustalonej, im
mniejszy jest czas t
k
w stosunku do stałej czasowej obwodu fazy T
e
. Obniżenie wartości
średniej prądu w impulsie prowadzi do analogicznej obniżki wartości przepływu
magnetycznego.
rys. 23 Przebiegi względnych wartości momentu dynamicznego silnika skokowego w funkcji
częstotliwości skoków dla rożnych stałych czasowych uzwojeń faz silnika
- -
21
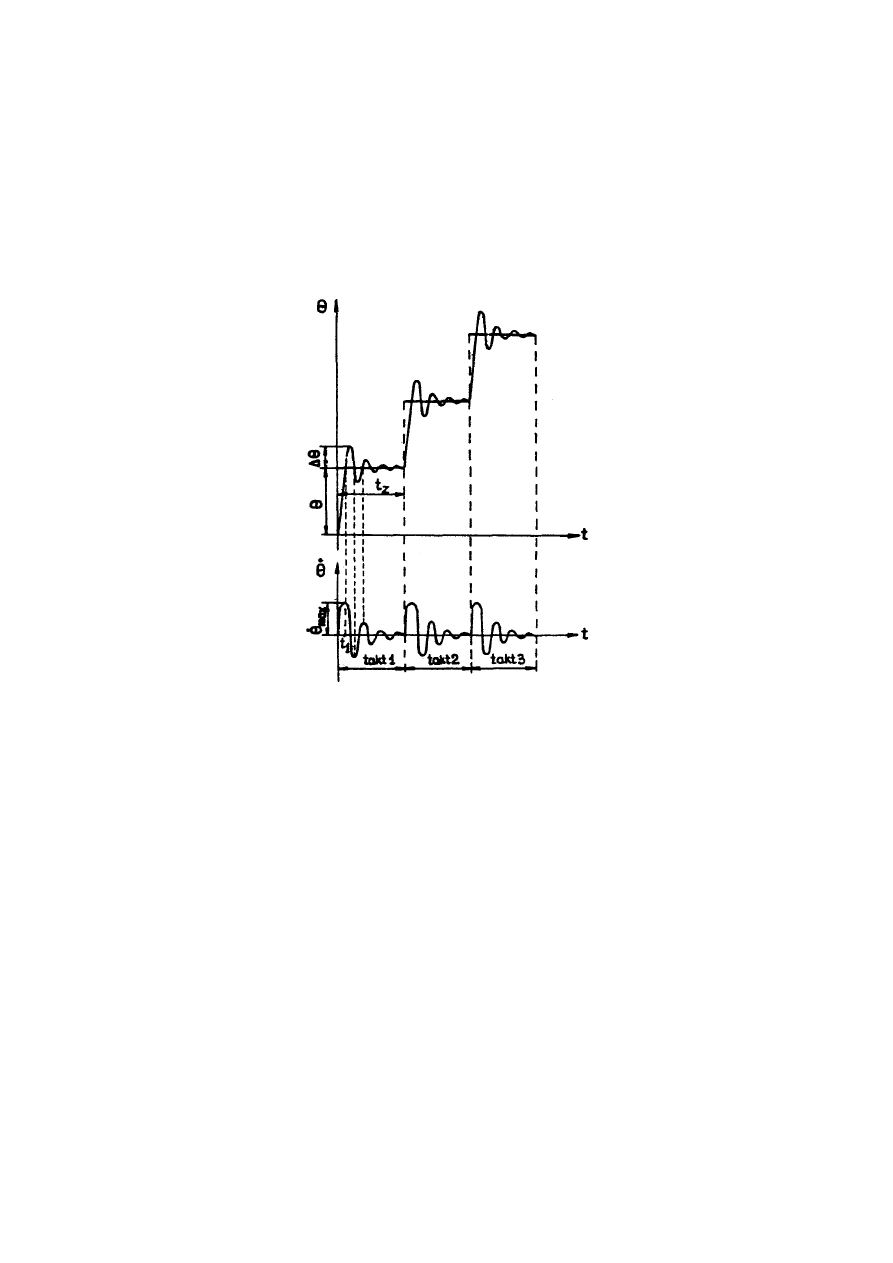
8. Praca quasi-statyczna
Praca quasi-statyczna ma miejsce przy wykonywaniu przez silnik pojedynczego skoku lub
ciągu skoków o dostatecznie małej częstotliwości. Odpowiada to przełączaniu uzwojeń z taką
częstotliwością, przy której proces przejściowy (najczęściej oscylacyjny) jaki na ogół ma
miejsce przy wykonywaniu skoku (rys.24) zostaje zakończony przed wykonaniem następnego
skoku. Inaczej mówiąc dla pracy guasi-statycznej prędkość kątowa wirnika
•
θ na początku
każdego skoku równa się zeru (rys.24).
rys. 24 Ilustracja pracy quasi-statycznej silnika skokowego.
W chwili t1 wirnik wykona skok, jednak ma on wtedy maksymalną prędkość i energię
kinetyczną i dlatego kontynuuje ruch w kierunku dodatnich kątów
θ przeciw siłom pola.
Zaczyna się proces swobodnych drgań wirnika wokół punktu równowagi stabilnej. Drgania
zanikną, kiedy cała energia kinetyczna zostanie zamieniona w straty (elektryczne,
magnetyczne i mechaniczne). Amplituda i czas zanikania t
z
drgań są tym mniejsze im większe
są straty.
Wielkościami charakteryzującymi pracę quasi-statyczną są:
- największa częstotliwość wykonywania skoków,
- wartość przeregulowania
∆θ, tj. maksymalne odchylenie od nowego punktu równowagi
stabilnej w procesie przejściowym,
- maksymalna wartość prędkości
•
θ w czasie skoku,
- czas zanikania drgań swobodnych tz wirnika w czasie skoku.
Dla silników skokowych należy dążyć do zmniejszenia
∆θ i tz przy jednoczesnym
zapewnieniu koniecznej prędkości chwilowej
•
θ wirnika i maksymalnej częstotliwości
wykonywania skoków.
- -
22
9. Praca kinematyczna (ustalona)
Praca kinematyczna (zwana też ustaloną) silnika skokowego ma miejsce przy sterowaniu
silnika impulsami o stałej częstotliwości, przy czym czas zanikania drgań swobodnych
wirnika t
z
jest większy od czasu trwania taktu komutacji. Oznacza to, że prędkość kątowa
wirnika
•
θ na początku każdego skoku nie musi równać się zeru.
Amplituda drgań osiąga wartość największą przy częstotliwości sterowania odpowiadającej
częstotliwości drgań własnych wirnika f
o
:
przy czym: J - moment bezwładności wirnika lub układu.
Ważną charakterystyką pracy kinematycznej jest graniczna charakterystyka mechaniczna
(zwana też charakterystyką częstotliwościową momentu pracy) czyli związek między
częstotliwością impulsów sterujących a wartością statycznego momentu obciążenia przy
którym silnik wypada z synchronizmu i traci zdolność sterowania. Ogólnie ze wzrostem
częstotliwości f zachodzi zmniejszenie momentu obrotowego silnika skokowego:
1) na skutek działania momentów tłumiących od napięć rotacji,
2) na skutek nie osiągania przez prądy wartości ustalonych (odpowiedzialne są za to
napięcia samoindukcji w uzwojeniach sterujących).
Podczas wyznaczania charakterystyki momentu obrotowego (momentu pracy) w funkcji
częstotliwości impulsów sterujących (co odpowiada liczbie skoków w ciągu sekundy) można
uzyskać taka wartość częstotliwości impulsów, przy której silnik wypada z synchronizmu
przy M = 0 i zatrzymuje się. Częstotliwość ta nosi nazwę granicznej częstotliwości pracy.
Aby poprawić przebieg charakterystyk mechanicznych. silników skokowych, często włącza
się szeregowo z ich uzwojeniami sterującymi dodatkowe rezystancje. W takim przypadku
należy odpowiednio zwiększyć napięcie zasilania silnika, aby pokryć spadki napiec na
rezystancjach dodatkowych. Ten sposób poprawiona charakterystyk nazywa się forsowaniem.
Przy zastosowaniu forsowania ulęgają, miedzy innymi, zwiększeniu wartości częstotliwości
rozruchowej granicznej i granicznej częstotliwości pracy.
10. Praca dynamiczna
Stany pracy dynamicznej (czyli takie stany przejściowe jak rozruch, hamowanie, nawrót czy
zmiana częstotliwości sterowania) są, z punktu widzenia eksploatacji, najważniejsze.
Charakter procesów przejściowych w tych stanach zależy zarówno od właściwości samego
silnika, obciążenia, jak również od warunków początkowych przy .których rozpoczął się
rozpatrywany stan przejściowy.
Rozruch następuje zwykle z
położenia ustalonego i jest wywołany skokowym wzrostem
częstotliwości impulsów sterujących od zera do wartości zadanej. Odpowiedź silnika jest
oscylacyjna - silnik wpada w synchronizm w ciągu pierwszego skoku przy nieznacznym
zakołysaniu się wirnika. Właściwości silnika charakteryzuje wówczas graniczna
charakterystyka momentu rozruchowego (rys.22b).
Hamowanie odpowiada skokowemu przejściu częstotliwości impulsów sterujących od pewnej
wartości do zera.
Nawrót jest wynikiem skokowej zmiany kierunku komutacji uzwojeń przy stałej zadanej
częstotliwości impulsów sterujących.
- -
23
Zjawiska zachodzące w ramach jednego skoku są takie jak przy rozruchu, a ponieważ jednak
amplituda wymuszenia jest dwukrotnie większa, więc i częstotliwość maksymalna nawrotu
jest mniejsza od maksymalnej częstotliwości rozruchu.
Zmiana częstotliwości może odbywać się w sposób nagły (zjawiska podobne do zjawisk przy
rozruchu lub hamowaniu) lub też powoli (płynnie). Przy powolnej zmianie częstotliwości
można rozpędzić silnik do znacznych prędkości. Ten rodzaj pracy charakteryzuje graniczna
charakterystyka momentu pracy (rys.22a).
11. Komutatory elektroniczne
Komutatory elektroniczne są integralnymi częściami układów napędowych z silnikami
skokowymi. Mają one za zadanie wytwarzanie impulsów prądowych, zasilających w
odpowiedniej kolejności poszczególne fazy silnika. W zależności od liczby faz silnika oraz
przewidywanego sposobu sterowania pracą silnika stosowane są rożnego typu komutatory.
Silniki skokowe mają zwykle 2, 3, 4 lub 5 faz. Ogólnie, komutator składa się z: obwodu
wejściowego, układów logicznych i wzmacniaczy mocy.
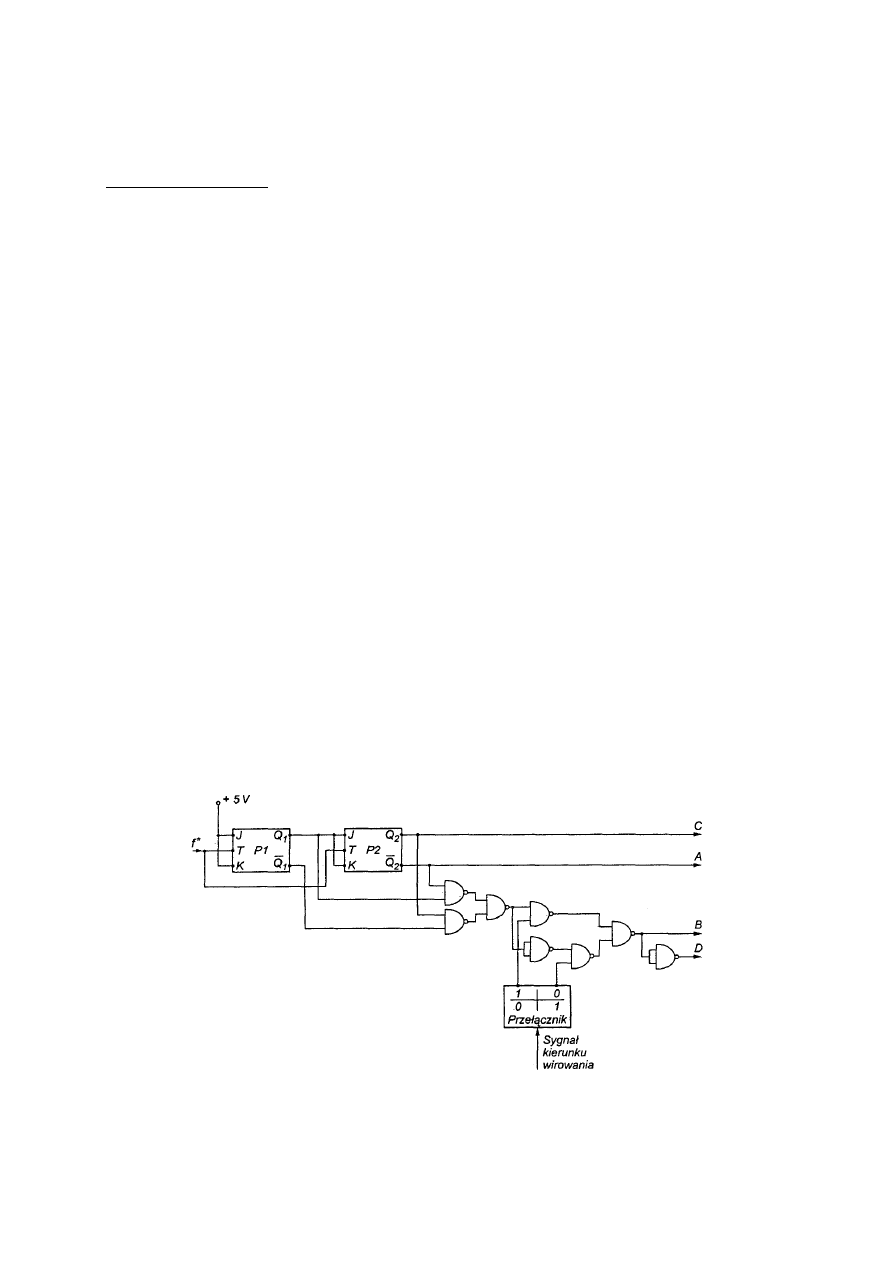
Na rys.26 przedstawiono schemat prostego komutatora do silnika cztero-fazowego o
sterowaniu symetrycznym. Zbudowany on jest z wykorzystaniem dwóch przerzutników JK
oraz kilku bramek typu NAND. Każdemu narastającemu zboczu impulsów sterujących o
przebiegu prostokątnym odpowiada jeden skok pola w silniku. Częstotliwość impulsów
sterujących f* jest wiec jednocześnie częstotliwością skoków wirnika silnika skokowego.
Impulsy wyjściowe z komutatora elektronicznego zasilają obwody baz tranzystorów
pełniących role łączników załączających poszczególne fazy silnika. Takie rozwiązanie
stosowane jest jednak tylko w przypadku bardzo prostych i malej mocy układów z silnikami
skokowymi. W układach bardziej skomplikowanych z kontrola kształtu impulsów radu i
większej mocy, im-pulsy wyjściowe z komutatora sterują układami sterowników prądu baz
wykonywanych w formie układów scalonych lub dyskretnych.
Przedstawiony komutator silnika czterofazowego służy do zasilania symetrycznego, tzn. że
jednocześnie zasilane są zawsze albo dwie fazy, albo jedna, co powoduje, ze momenty
synchronizujące rozwijane przy każdym skoku są jednakowe.
a)
rys. 26 Przykładowe rozwiązanie układu logicznego komutatora do silnika czterofazowego
- -
24
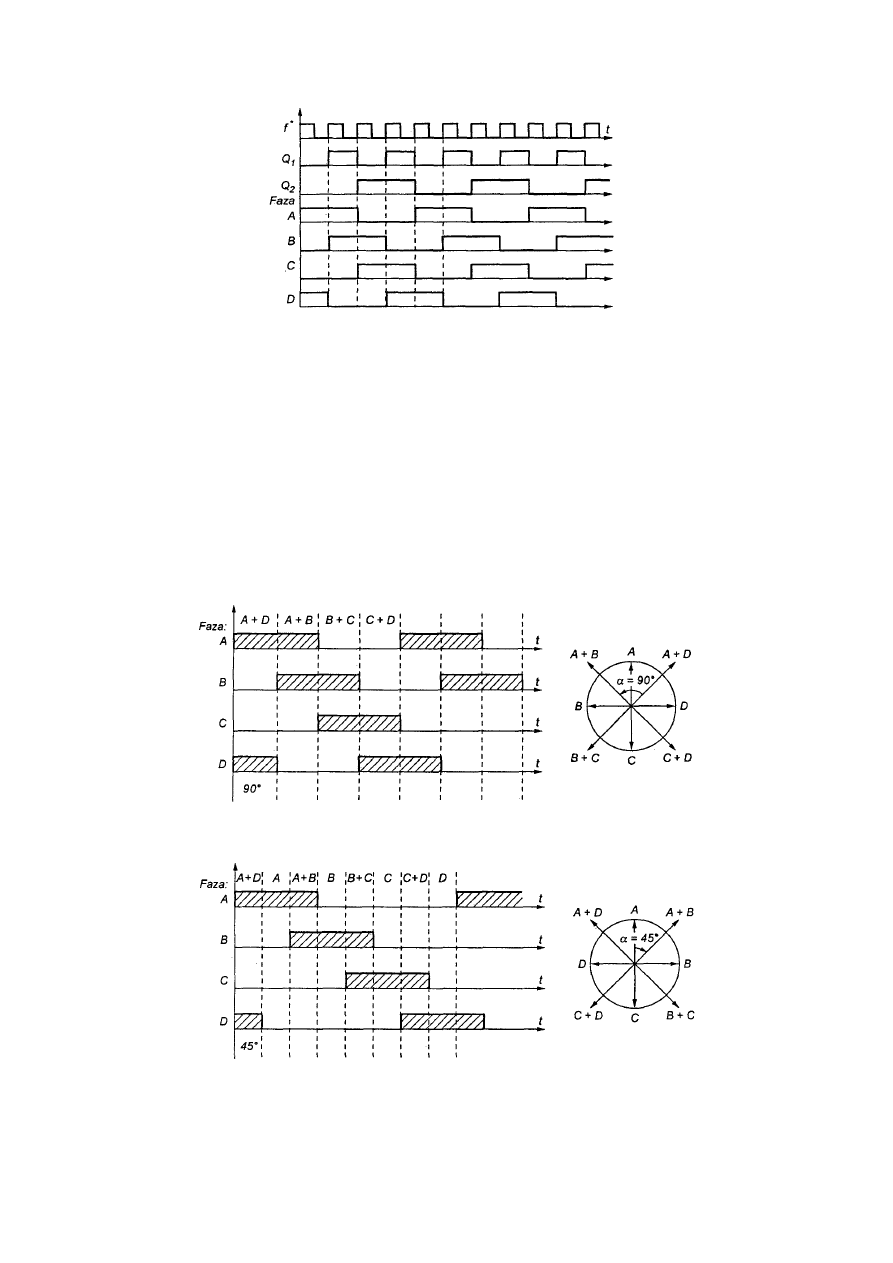
rys. 26 Przebiegi czasowe sygnałów układzie komutatora z rys.25
Silnik czterofazowy może jednak pracować z innym ,,rozkładem czasowym" impulsów
prądowych, pokazanym na rys.27b. W tym przypadku są włączane naprzemiennie dwie fazy i
jedna, co daje nierówne przepływy magnetyczne, a więc i momenty synchronizujące w
kolejnych skokach wirnika. Jest to tzw. sterowanie niesymetryczne, które mimo nierównego
momentu w kolejnych skokach jest czasami stosowane z uwagi na zdwojona liczbą skoków
wirnika, przypadającą na jeden jego obrót.
Skrócenie długości skoku o potowe może być czasami korzystne z punktu widzenia
napędzanego mechanizmu.
Opisane sposoby zasilania silnika czterofazowego nazywane są skrótowo sterowaniem 1/4,
1/2 lub 3/8.
a)
b)
rys. 27 Sekwencje czasowe impulsów zasilających silnika czterofazowego: a) zasilanie
symetryczne; b) zasilanie niesymetryczne
- -
25
12. Optoelektroniczne przetworniki obrotowo-impulsowe typu PFI60 -
obrotowo-kodowe typu PFK75
Przetworniki obrotowo-impulsowe służą do wytworzenia ciągu impulsów, których ilość jest
proporcjonalna do przebytej drogi kątowej wałka osi przetwornika. Układ pomiarowy składa
się z wzorca szklanego z naniesioną metodą fotolitografii mozaiką pól (na przemian i pola
przezroczyste i nieprzeźroczyste) która oświetlana jest z jednej strony światłem
podczerwonym, a z drugiej jej strony umiejscowione są odbiorniki tego światła. Wirująca
tarcza impulsowa powoduje przysłanianie i odsłanianie tych odbiorników, wywołując tym
samym generowanie w nich ciągu sygnału elektrycznego. Sygnały z fotoelementów są
następnie wzmacniane i kształtowane w sygnał o określonym standardzie TTL :
V
8
,
0
"
0
"
≤
V
4
,
2
"
1
"
≥
Przetworniki PFI przygotowane są. do współpracy z rewersyjnymi licznikami impulsów. Jeśli
urządzenia te posiadają układy rozróżniania kierunku oraz, multiplikacji zboczy uzyskuje się
informacje o kierunku obrotu osi oraz czterokrotne zwiększenie rozdzielczości.
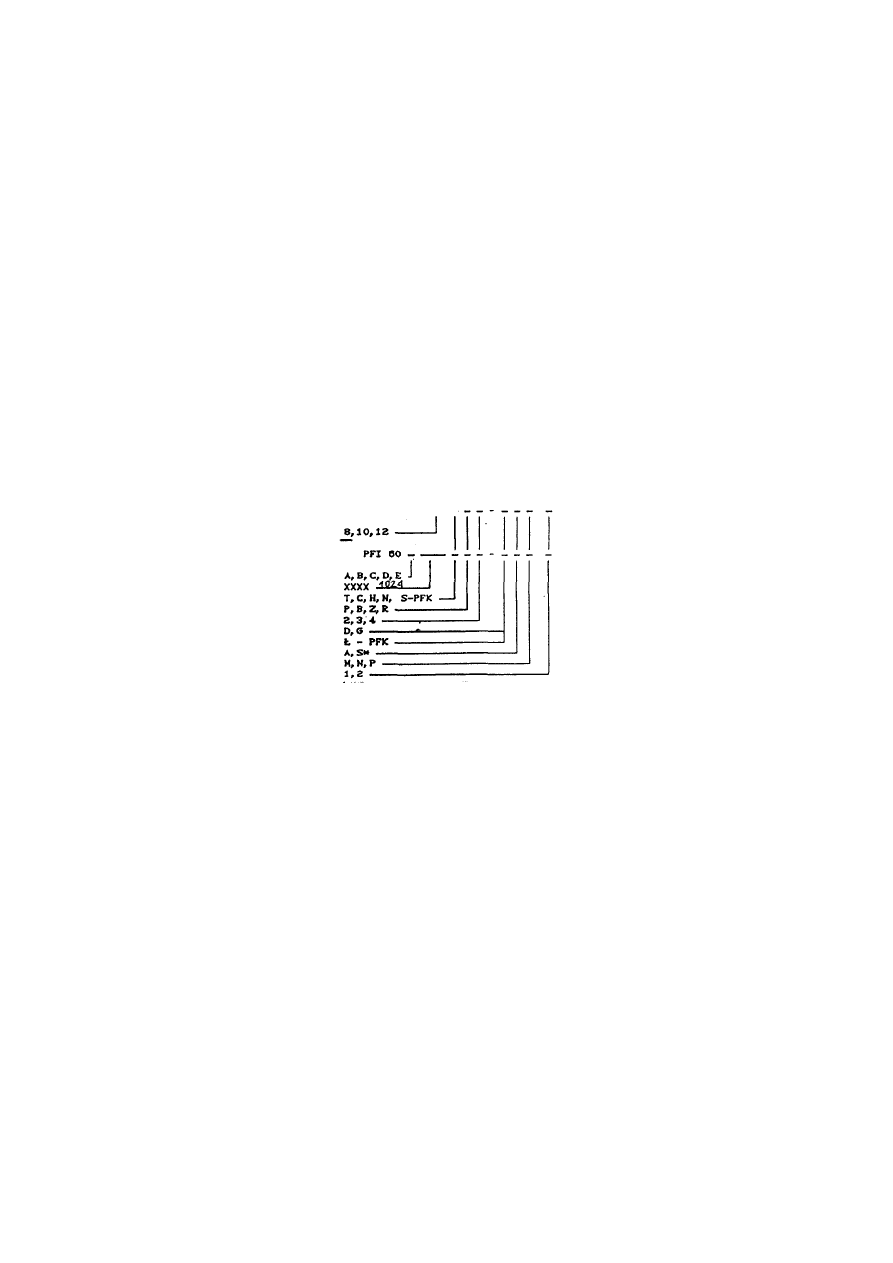
W przypadku przetworników kodowych (PFK) na tarczy szklanej
naniesiona jest mozaika w
postaci 8-śmio, 10-cio albo 12 bitowego kodu GRAY-a. Tego typu rozwiązanie daje
możliwość sczytywania w sposób absolutny położenia osi przetwornika.
Kod określający typ przetwornika
13. Liczniki rewersyjne LR-XXX
Liczniki rewersyjne typu LR-XXX są przyrządami pomiarowymi liczącymi impulsy
odpowiadające kolejnym jednostkowym przyrostom wartości kąta z jednego (LR-1XX),
dwóch (LR-2XX) lub trzech (LR-3XX) przetworników obrotowo-impulsowych np. typu PFI.
Umożliwiają cyfrowy pomiar przesunięcia kątowego lub pośrednio liniowego wzdłuż 1, 2 lub
3 współrzędnych i porównanie z wartością zadaną (nastawnikiem, klawiaturą lub
mikrokomputerem).
Przyrząd umożliwia pomiar i cyfrowy odczyt przesunięcia w dwóch układach, tj.:
- w układzie bezwzględnym: wymiary odniesione do stałego punktu (bazy) - zera licznika
- w układzie przyrostowym: wymiary zadane w szeregowym łańcuchu wymiarowym.
Sterowanie przyrządu może się odbywać bezpośrednio ręcznie, bądź poprzez gniazdo
wielostykowe, sygnałami z układów centralnego sterowania i kontroli.
Trzy wyjścia cyfrowe licznika mogą służyć do sterowania np. silnika napędu maszyny, na
której zainstalowano licznik.
Licznik posiada układ zwielokrotniania liczby impulsów z przetwornika zwiększający 4x
rozdzielczość (np. 1000 działek przetwornika daje 4000 impulsów).
- -
26
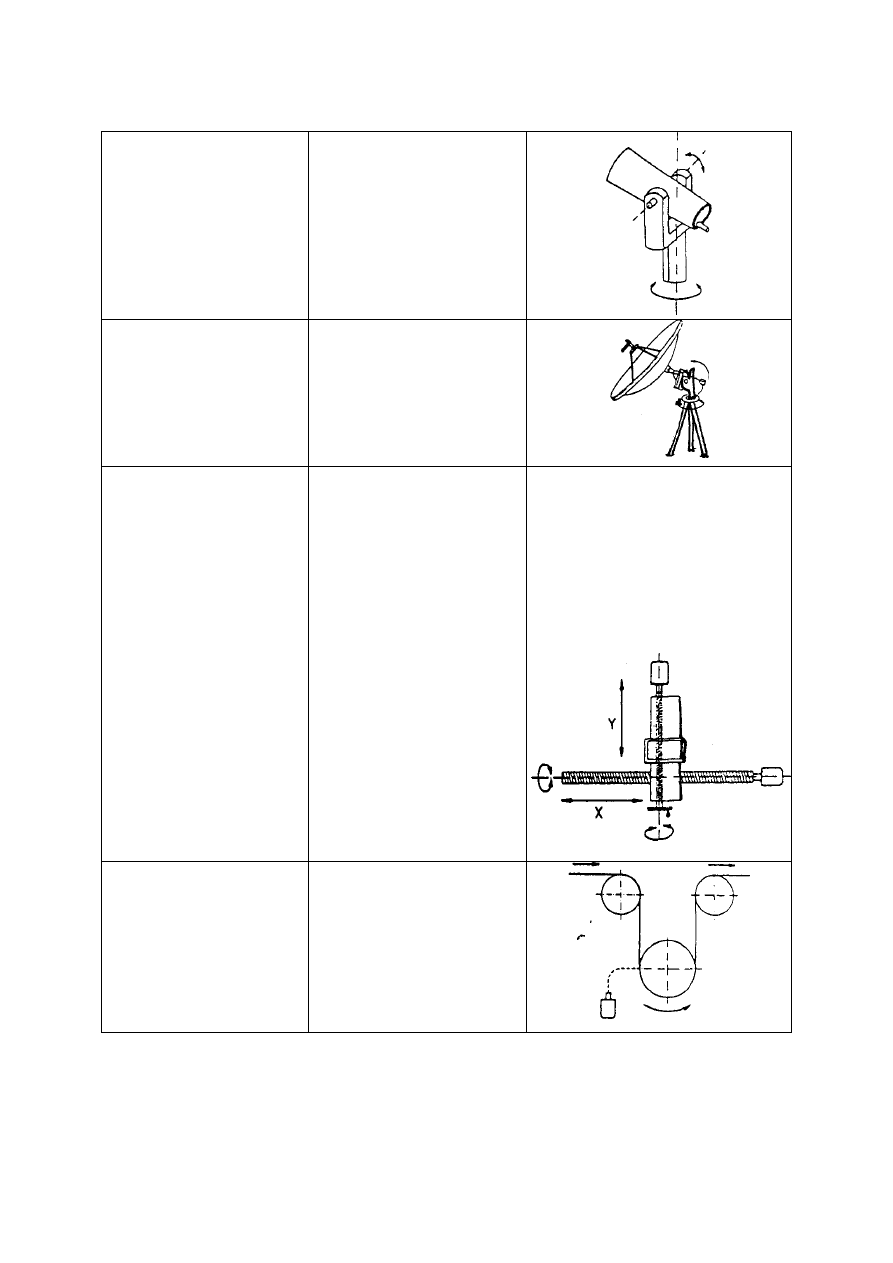
14. Przykładowe aplikacje optoelektroniczych przetworników obrotowych
Pozycjonowanie i pomiar
położenia teleskopu
astronomicznego i innych
obiektów wymagających
precyzyjnego ustawiania w
określonym kącie dla
długotrwałego śledzenia
pozycji w sposób
absolutny.
2x PFK75GRA12,
WP222
Pozycjonowanie anteny
satelitarnej
np.:2x PFK75GRA12,
WP222
Sterowanie położeniem
współrzędnościowego
stołu pomiarowego lub
stołu obrabiarki w dwóch
osiach oraz osi pionowej
2/3 x PFI60A2500, 2/3 x
LR187 (LR147)
2/3 x PFI60A2500,
2 x LR169,
2/3 x PFI60A2500,
LR287/LR387
Pomiar długości taśmy
przewijanego materiału
PFI60
LR147
PFI60
LR187
PFI60
LR169
kpi LRD179
- -
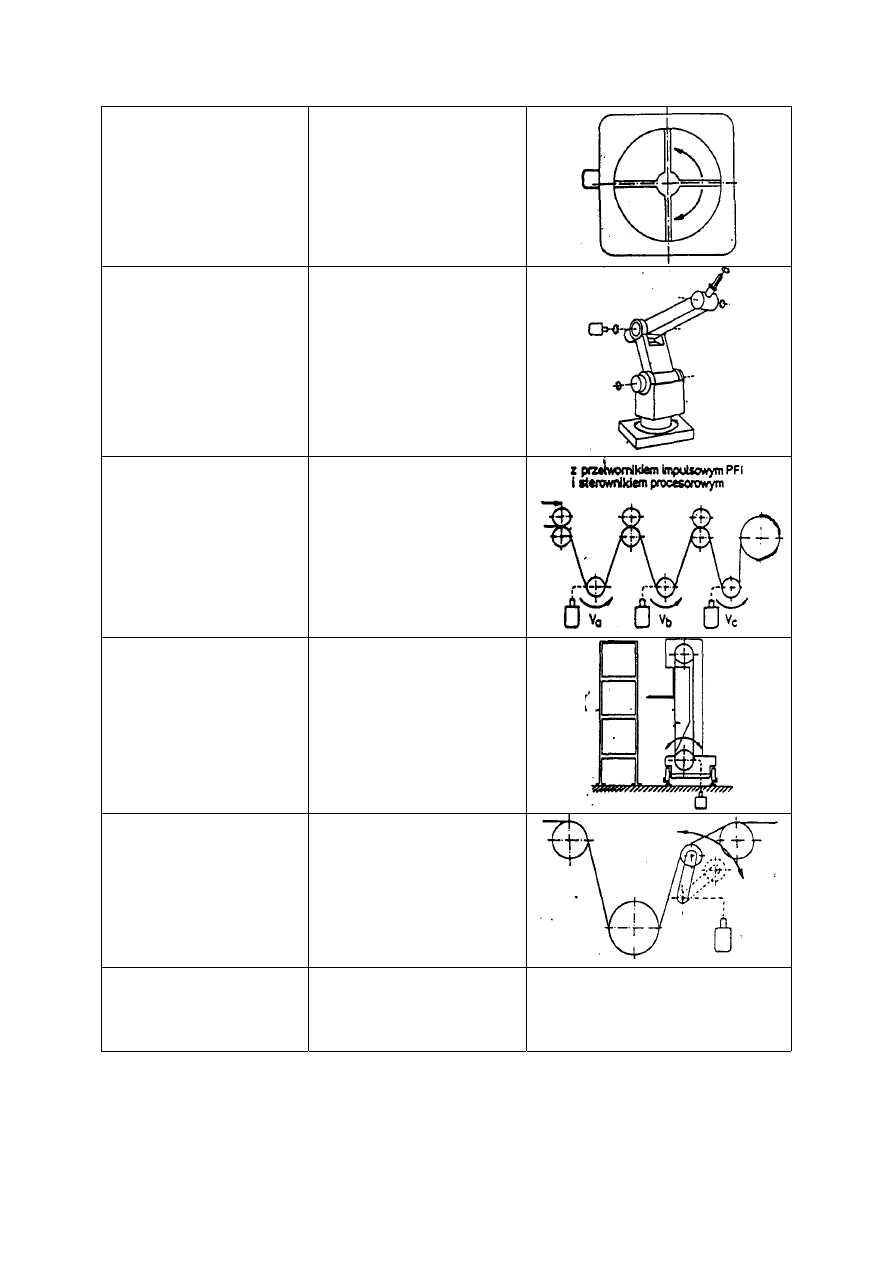
27
Stół podziałowy –
rozwiązanie jak wyżej.
Kontrola położenia ramion
robota przemysłowego. np:
malarskiego.
Pomiar i synchronizacja
prędkości obrotowej
walców
Kontrola i sterowanie
podnośnikiem wysokiego
składowania
PFI60A
LR169
Pomiar naprężenia taśmy
- z zadaniem katów
będących stanami
awaryjnymi.
PFK75GRA8,
WP123
- ze sterowaniem
proporcjonalnym silnikiem
do napędu przesuwu taśmy
PFK75GRA8, SP188
- -
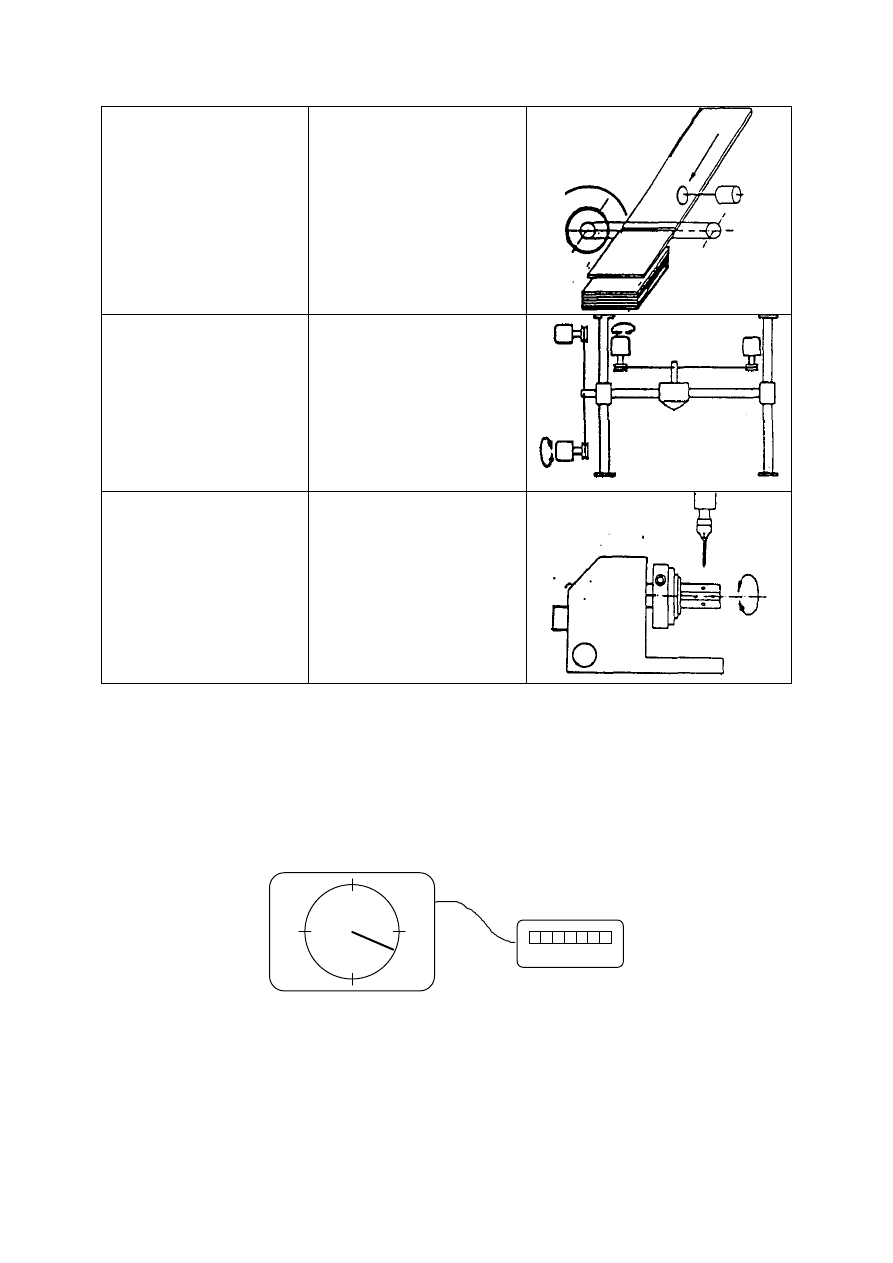
28
Automatyczne cięcie
wyrobu na długość wraz
ze zliczaniem ilości
pociętych odcinków lub
zliczanie łącznej długości
przerobionego materiału.
możliwość wprowadzania
do biblioteki
standardowych wymiarów
ciecia.
PF160A,
LR169
Kontrola i sterowanie
układem napędowym
karetki plotera
Podzielnica mechaniczna z
pozycjonowaniem
elektronicznym
PFK75GRA12,
WP122
15. Przebieg ćwiczenia
1. Pomiary optoelektronicznego przetwornika obrotowo-kodowego PFK75GRA8
180
0
8 bitowy przetwornik położenia bezwzględnego Wskaźnik cyfrowy.
Przetwornik zasilany jest z wyświetlacza. Osią wskaźnika obraca się ręcznie.
Włączyć zasilanie przetwornika i wyświetlacza. Jest wspólne dla tych dwóch urządzeń.
Wykonać następujące czynności a spostrzeżenia zapisać w protokole:
a) zmierzyć kąt odpowiadający jednej działce elementarnej,
- -
29
b) obracając osią przetwornika sprawdzić ile działek elementarnych posiada wskaźnik.
c) Obliczyć kątową wielkość działki elementarnej.
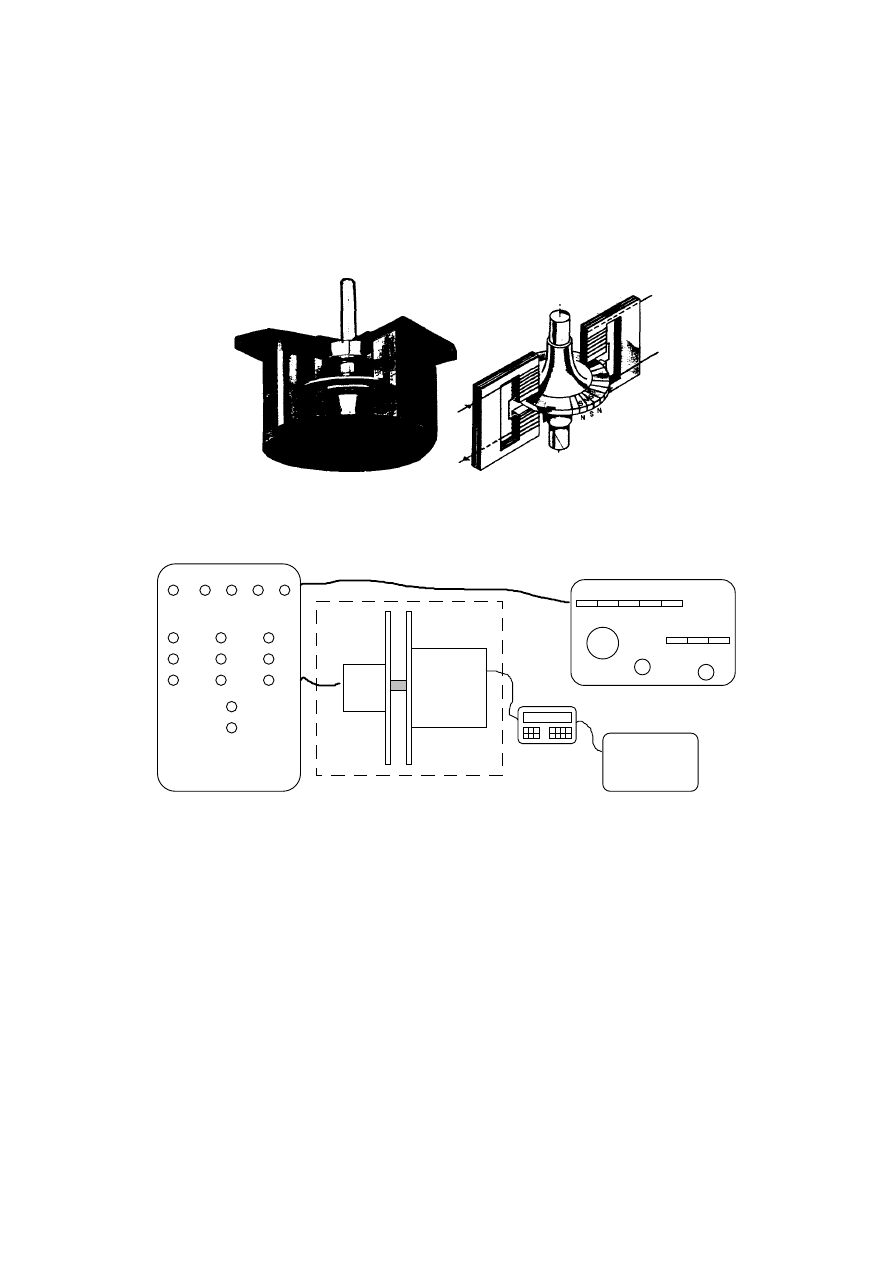
2. Pomiary silnika krokowego (skokowego)
Silnik krokowy typu P530 jest wielopołożeniowym silnikiem najnowszej generacji. Posiada
on 100 pozycji na jeden obrót, a więc l krok wynosi 3,6 stopnia. Silnik posiada 4 uzwojenia
zasilające. Jego maksymalny moment wynosi około 0,1 Nm. Silnik wykonuje l obrót po
podaniu 100 impulsów zasilających. Średnica osi silnika – 5 mm.
Budowa silnika. Przekrój i schemat.
10k
1 10 100 1k
1 0.1 0.01
A
DC
f
A
s
m
B
s
m
G
w
z
POWER
RESET
K
l
p
s
w
start
generator
licznik
zasilacz
przetwornik
impulsowy
zasilacz silnika
silnik
przetwornika
- -
30
Opis funkcji przełączników w zasilaczu silnika.
„Power” – wyłącznik główny.
Lp.
Przełącznik (funkcja)
Górne położenie
Dolne położenia
1.
Start
zasilanie wyłączone
zasilanie włączone
2.
s (sposób startu)
zawsze górne
-
3.
w (tłumienie)
-
zawsze dolne
4.
G (generator napięcia sterującego)
„w” - wewnętrzny
„z” - zewnętrzny
5.
K (kierunek obrotów)
„L” - w lewo
„P” - w prawo
A
„s”
-
6.
Silnik wykonuje 1
skok na impuls
Rodzaj sterowania
B
„s”
-
A
„s”
-
7.
Silnik wykonuje
1/2 skok na impuls
Rodzaj sterowania
B
-
„m”
A
-
„m”
8.
Silnik wykonuje
1/10 skok na
impuls
Rodzaj sterowania
B
„s”
-
A
-
„m”
9.
Silnik wykonuje
1/32 skok na
impuls
Rodzaj sterowania
B
-
„m”
2.1 Obserwacja pracy silnika, sterowanie wewnętrzne
Zaobserwować i narysować oscylogramy napięcia zasilającego cewkę silnika. Obliczyć kąt
mikroskoków dla przypadków gdy (dl różnych sposobów sterowaniasterowania):
a) silnik wykonuje 1 skok na impuls – przełączniki: „start” – „góra”, „s” – „góra”,
„w” –> „dół”, „G” –> „w”, „K” –> „l”, „A”-> „s”, „B” –> „s”, start –>„dół”,
b) silnik wykonuje 1/2 skok na impuls - przełączniki: „start” –> „góra”, „s” –> „góra”,
„w” –> „dół”, „G” –> „w”, „K” –> „l”, „A”- > „s”, „B” –> „m”, start –> „dół”,
c) silnik wykonuje 1/10 skok na impuls - przełączniki: „start” –> „góra”, „s” –> „góra”,
„w” –> „dół”, „G” –> „w”, „K” –> „l”, „A” –> „m”, „B” –> „s”, start –> „dół”,
d) silnik wykonuje 1/32 skok na impuls - przełączniki: „start” –> „góra”, „s” –> „góra”,
„w” –> „dół”, „G” –> „w”, „K” –> „l”, „A” –> „m”, „B” –> „m”, start –> „dół”.
Powtórzyć obserwacje i narysować oscylogramy od a) do d) dla przeciwnego kierunku
obrotu „K” – „p”.
2.2 Obserwacja pracy silnika, sterowanie zewnętrzne
Załączyć generator. W generatorze "DC ofset" i "Amplituda" w prawo na maksimum.
"Amplituda" x1. Ustawić częstotliwość 10 Hz. Zaobserwować obracanie się przy pełnym
skoku, 1/2 skoku, 1/10 skoku i 1/32 skoku.
Pomiary prędkości obrotowej
Ustawić sterowanie na 1/2 kroku "A" - "s", "B" - "m". Generator 500Hz. " start" - "dół".
Przełączyć "B" - na "s" Zwiększać częstotliwość aż silnik stanie." start" - " góra" Odczytać
częstotliwość ze skali generatora.
Ustawić sterowanie na pełen krok "A" - "s", "B" - "s". Generator x 100 Hz. Regulować

- -
31
częstotliwość od 100 do 1000 Hz. załączając i wyłączając silnik.
Zmierzyć częstotliwość przy której silnik nie rusza. Obliczyć prędkości obrotowe w obu
przypadkach.
3. Optoelektroniczny przetwornik impulsów
Przetwornik wytwarza 1024 impulsów na obrót. Współpracuje z licznikiem rewersyjnym
LRD 169, który generuje z tego 4 razy więcej pozycji jak również rozróżnia kierunek
obrotów. Przetwornik napędzany jest silnikiem krokowym. Generator ustawić na 10 Hz.
Przełączniki ustawić: "A" - "s", "B" - "s"," start" - " góra". Załączyć zasilanie licznika. Po
ustaleniu się wskazań wcisnąć "pgm", po pojawieniu się "program" , wcisnąć "8", wcisnąć
"clr", powinno się pojawić "8. 0", wcisnąć "ok" po pojawieniu się "pogram" wcisnąć "6",
wcisnąć "clr", ustawić 10, powinno się pojawić "6. 10" .wcisnąć ''ok", po pojawieniu się
"program" wcisnąć "pgm". Po pojawieniu się liczb wcisnąć "clr". Licznik będzie wskazywał
obrót osi przetwornika co 1 impuls co odpowiada l/ 4096 obrotowi wału. Obliczyć minimalny
rozróżnialny kąt. " start" - " dół" .Zmierzyć czas jednego obrotu przy pełnym kroku i przy
mikroskokach 1/2, 1/10, 1/32. Przełączyć generator zakres pojedynczych Hz i zaobserwować
ruch." start" - " góra".
Uwaga: w przypadku przepełnienia licznika i wygaszenia wyświetlacza wyłączyć zasilanie
licznika na 10 s i powtórzyć programowanie.
4. Pomiar przesunięcia obwodowego
Licznik ma możliwość ustalenia mnożnika do pomiaru prędkości obwodowej lub
przesunięcia. Przeprowadzić procedurę programowania jak w punkcie 2.4. Wcisnąć "pgm",
po pojawieniu się "program", wcisnąć "8", wcisnąć "clr", ustawić "3" powinno się pojawić "8.
3",wcisnąć "ok", po pojawieniu się "program" cisnąć"6", wcisnąć "clr", ustawić K6, powinno
się pojawić "6. K6" .wcisnąć "ok", po pojawieniu się "program" wcisnąć "pgm". Po
pojawieniu się liczb wcisnąć "clr". Licznik będzie wskazywał przesunięcie obwodowe w mm.
K6 należy obliczyć ze wzoru:
N
D
K
/
5
6
⋅
=
π
gdzie: D -średnica wałka w mm, N - liczba impulsów przetwornika (w tym przypadku 1024)
Zaprogramować licznik dla wałka 5,10, 30, mm. Załączyć silnik" start" - "dół" przy 10Hz i
odczytać przesuw po 10 s.
______________________________________________________________________
Literatura:
Zofia Majerowska - "Laboratorium elektrotechniki ogólnej" WPW
Józef Łastowiecki i in. - " Laboratorium podstaw napędu elektrycznego w robotyce"
Document Outline
- SILNIK SKOKOWY
- Podstawowe wiadomości o silnikach skokowych
- Silnik skokowy magnetoelektryczny (o wirniku czynnym)
- Silnik skokowy reluktancyjny (o wirniku biernym)
- Silniki hybrydowe
- Stan pracy statycznej - moment obrotowy silnika skokowego
- Charakterystyka kątowa silnika skokowego. Stabilność i warunki
- Charakterystyki mechaniczne silników skokowych
- Praca quasi-statyczna
- Praca kinematyczna (ustalona)
- Praca dynamiczna
- Komutatory elektroniczne
- Optoelektroniczne przetworniki obrotowo-impulsowe typu PFI60 - obrotowo-kodowe typu PFK75
- Liczniki rewersyjne LR-XXX
- Przykładowe aplikacje optoelektroniczych przetworników obrotow
- Przebieg ćwiczenia
Wyszukiwarka
Podobne podstrony:
silnik skokowy przebiegi czasowe
Silnik skokowy sterowany komputerem
Sprawozdanie Cw 5 silnik skokowy
Silnik skokowy
7 silnik skokowy reluktancyjny instrukcja
irek sels, SILNIK SKOKOWY
silnik skokowy, różne
Badanie silnika skokowego, Elektrotechnika, Rok 3, Maszyny elektryczne
1Budowa silnika skokowego3id 18 Nieznany (2)
Badanie silnika skokowego, Badanie silnika skokowego, POLITECHNIKA RADOMSKA
silnik skokowy przebiegi czasowe
Silniki SKOKOWE
silniki prądu stałego
PODSTAWY STEROWANIA SILNIKIEM INDUKCYJNYM
04 Zabezpieczenia silnikówid 5252 ppt
SILNIKI GRAFICZNE W GRACH KOMPUTEROWYCH
SILNIKI
więcej podobnych podstron