MECHANIKA BUDOWLI
Wykład 3:
WYZNACZANIE PRZEMIESZCZEŃ.
UKŁADY STATYCZNIE WYZNACZALNE
Prowadzący: dr inż. Wojciech Zielichowski-Haber
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Plan wykładu
1. Rodzaje więzi sprężystych
2. Zasady prac wirtualnych dla więzi sprężystych
3. Wyznaczanie przemieszczeń wywołanych działaniem sił
4. Stany jednostkowe w wyznaczaniu przemieszczeń
5. Metody obliczenia całek
6. Wyznaczanie przemieszczeń wywołanych osiadaniem podpór
7. Wyznaczanie przemieszczeń wywołanych zmianą temperatury
8. Wyznaczanie przemieszczeń wywołanych imperfekcjami
geometrycznymi
9. Podsumowanie
10. Przykłady
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Rodzaje więzi sprężystych
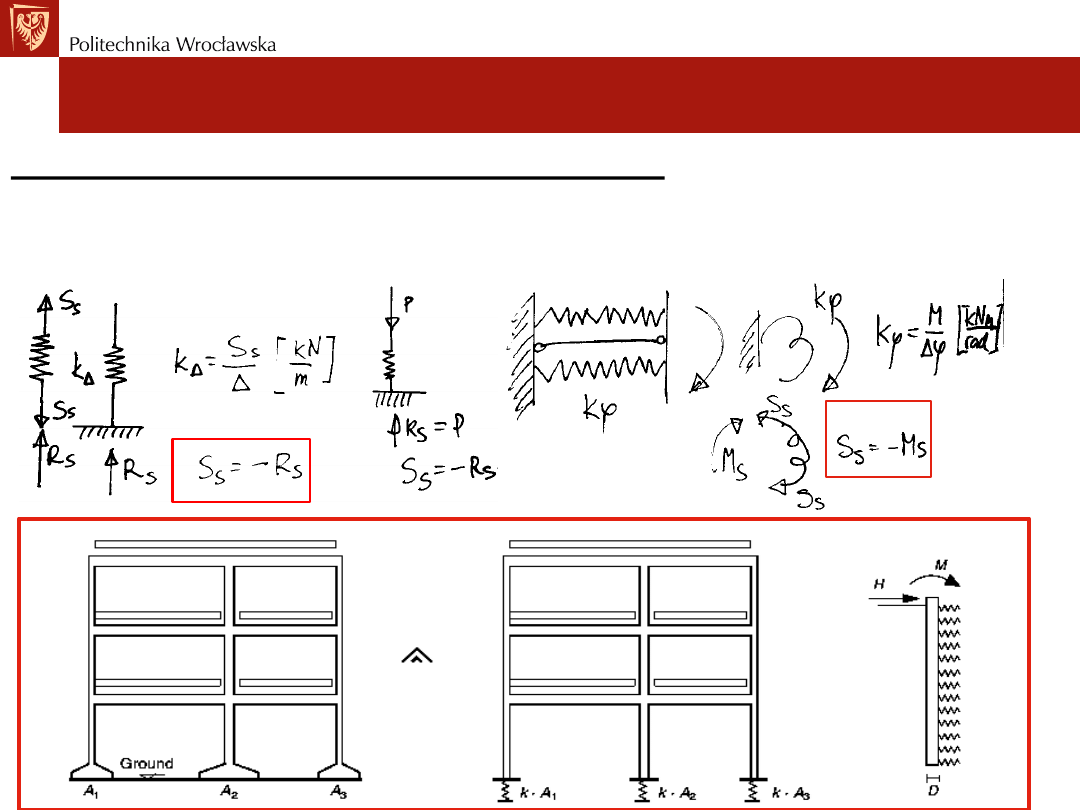
Więzi sprężyste w schemacie statycznym:
• Każda więź sztywna ma swój odpowiednik sprężysty,
• Wartość reakcji oraz sił wewnętrznych w podporze sprężystej w układach
SW jest identyczna jak w podporze sztywnej, w układzie SN nie jest
identyczna.
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Rodzaje więzi sprężystych
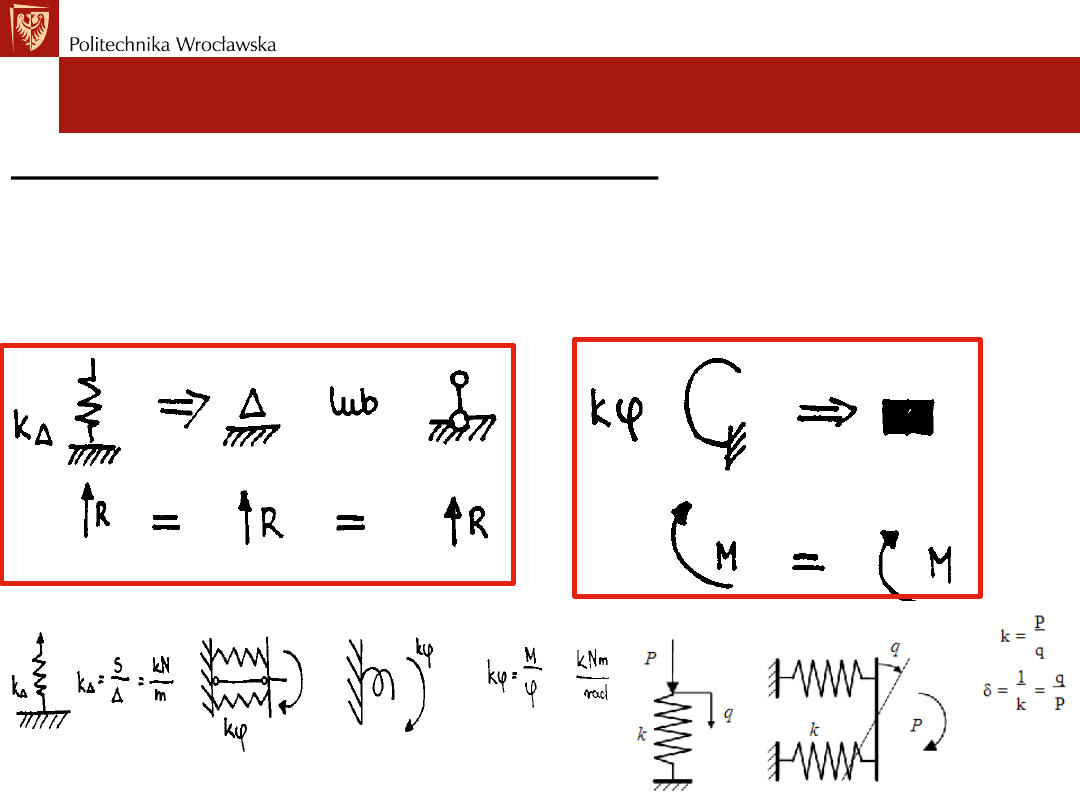
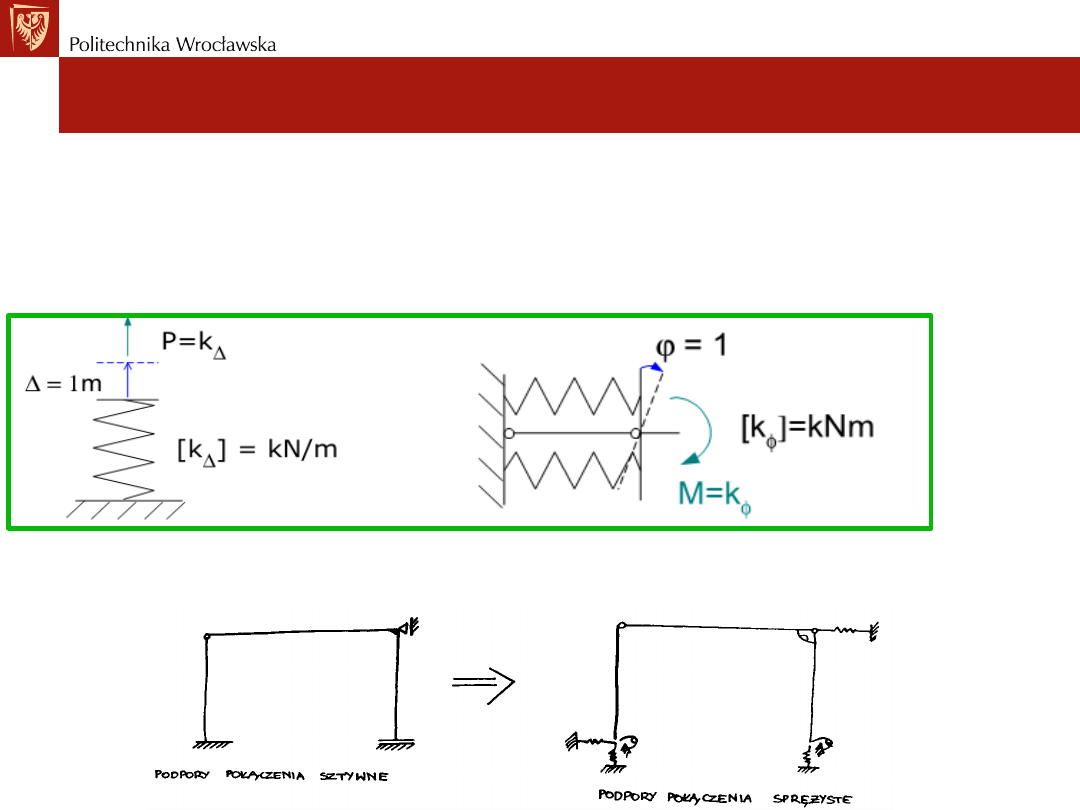
Rozróżnia się dwa typy więzi sprężystych:
a) więzi translacyjne przenoszące tylko siły podłużne (pionowe i poziome),
b) więzi rotacyjne przenoszące tylko momenty zginające.
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Rodzaje więzi sprężystych
Więzi sprężyste charakteryzuje jeden parametr - sztywność k.
• Sztywność
k
∆
lub
k
φ
jest równa sile (reakcji) / momentowi
zgniającemu, która powoduje jednostkowe odkształcenie więzi w
postaci translacji (wydłużenie, skrócenie) / rotacji (obrót).
• Więzi sztywne są szczególnym przypadkiem więzi sprężystych, gdzie
sztywność k = ∞ (jest nieskończona).
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Rodzaje więzi sprężystych
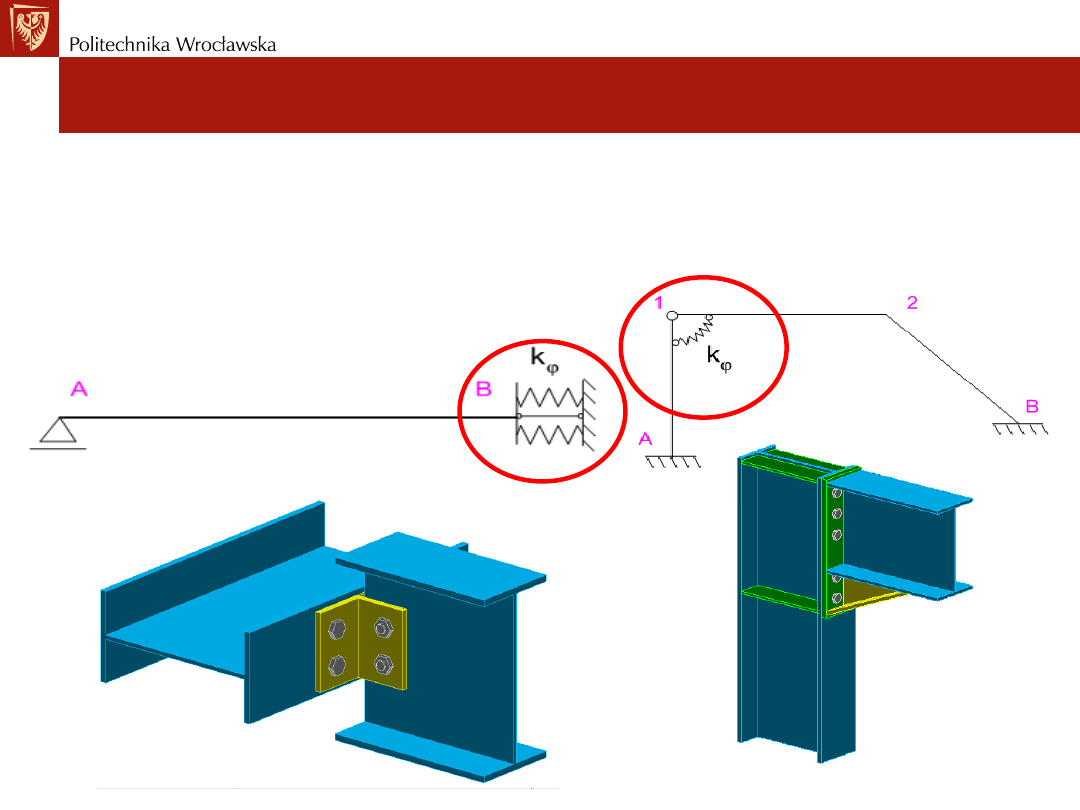
Przykłady:
• Sztywność sprężystego zamocowania na obrót belki oraz
sprężystego węzła w ramie
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Rodzaje więzi sprężystych
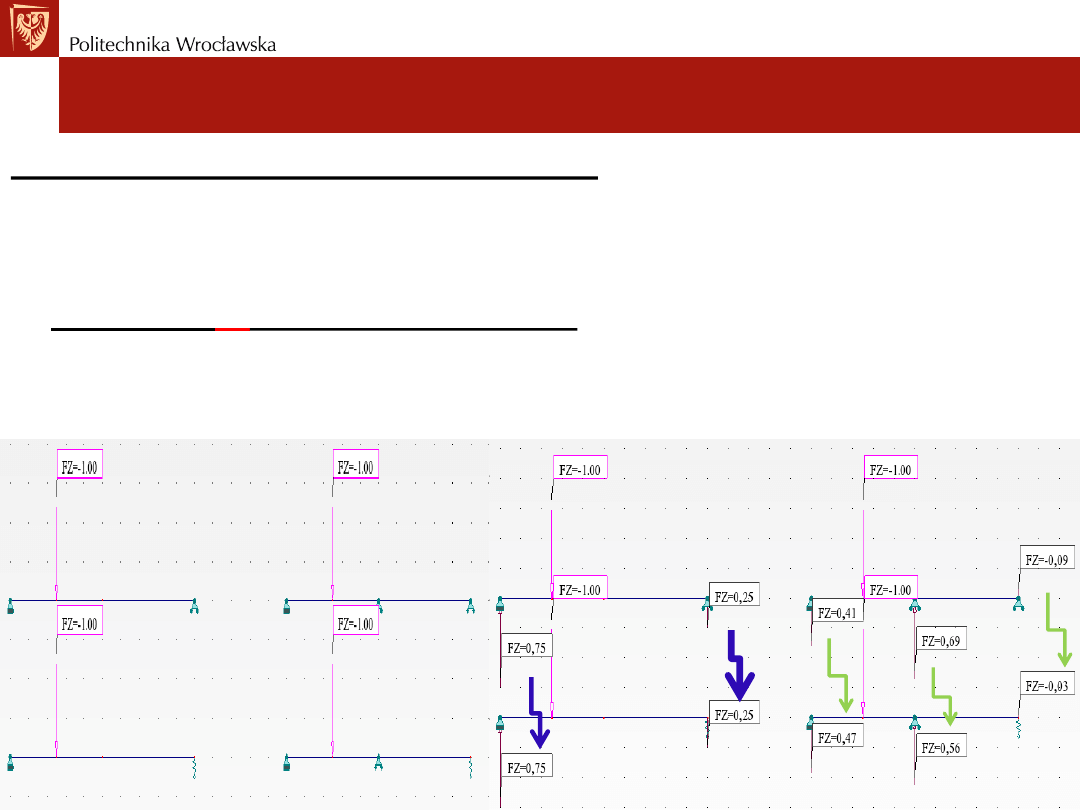
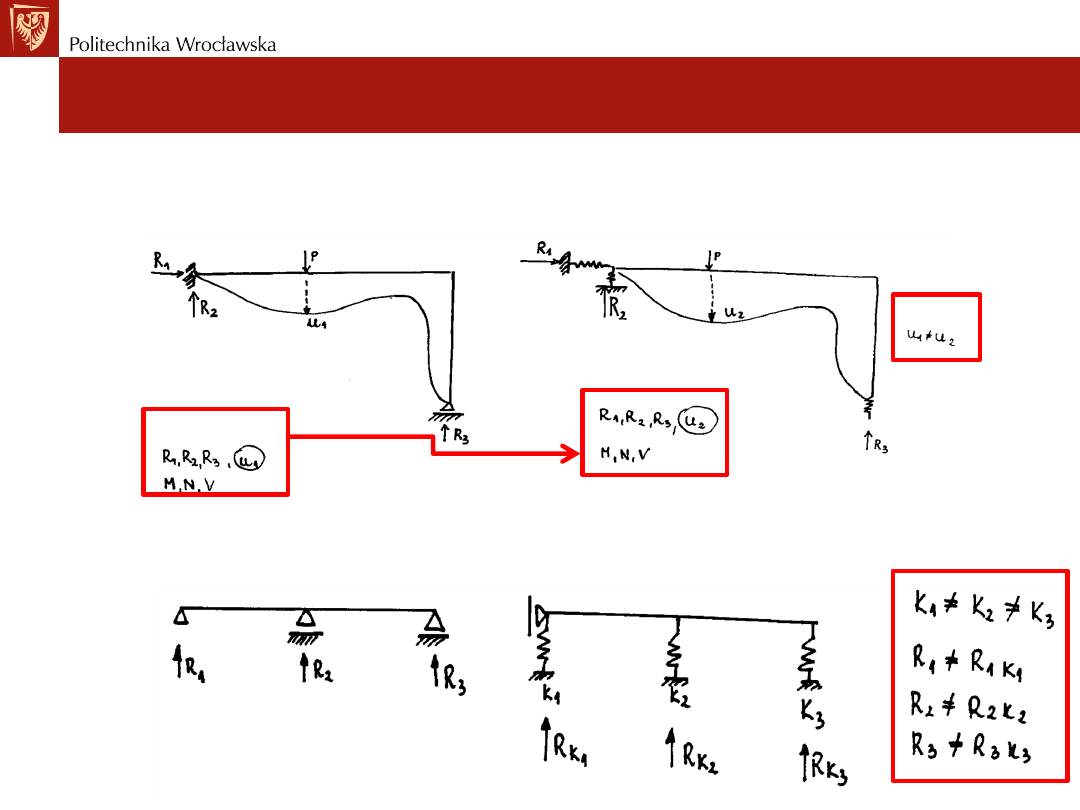
Więzi sprężyste w schemacie SW i SN:
W układach
SW
wartość reakcji w danym schemacie statycznym z podporą
lub podporami sprężystymi i sztywnymi jest identyczna jak w tym samym
schemacie z podporami tylko sztywnymi.
W układach
SN
nie są one identyczne.
Dotyczy to również sił wewnętrznych M, N, V które zależą od działającego
obciążenia i powstałych reakcji.
SW
SN
SW
SN
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Rodzaje więzi sprężystych
Więzi sprężyste w schemacie SW i SN:
SW
SN
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Rodzaje więzi sprężystych
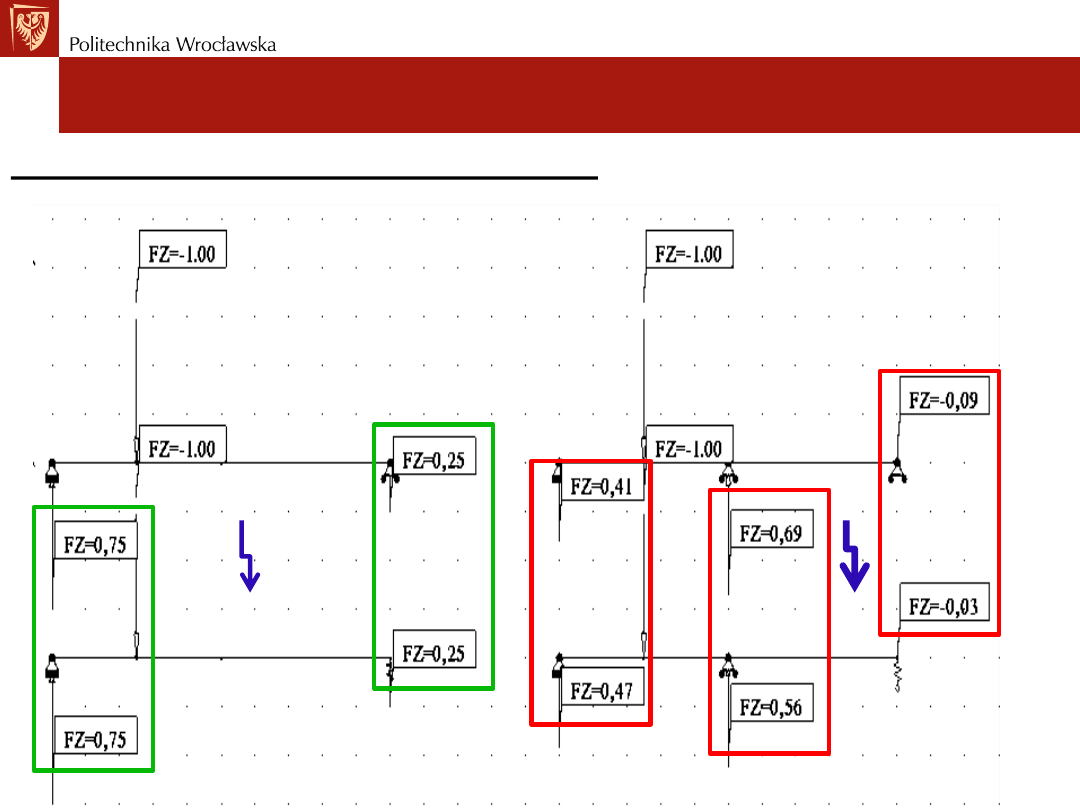
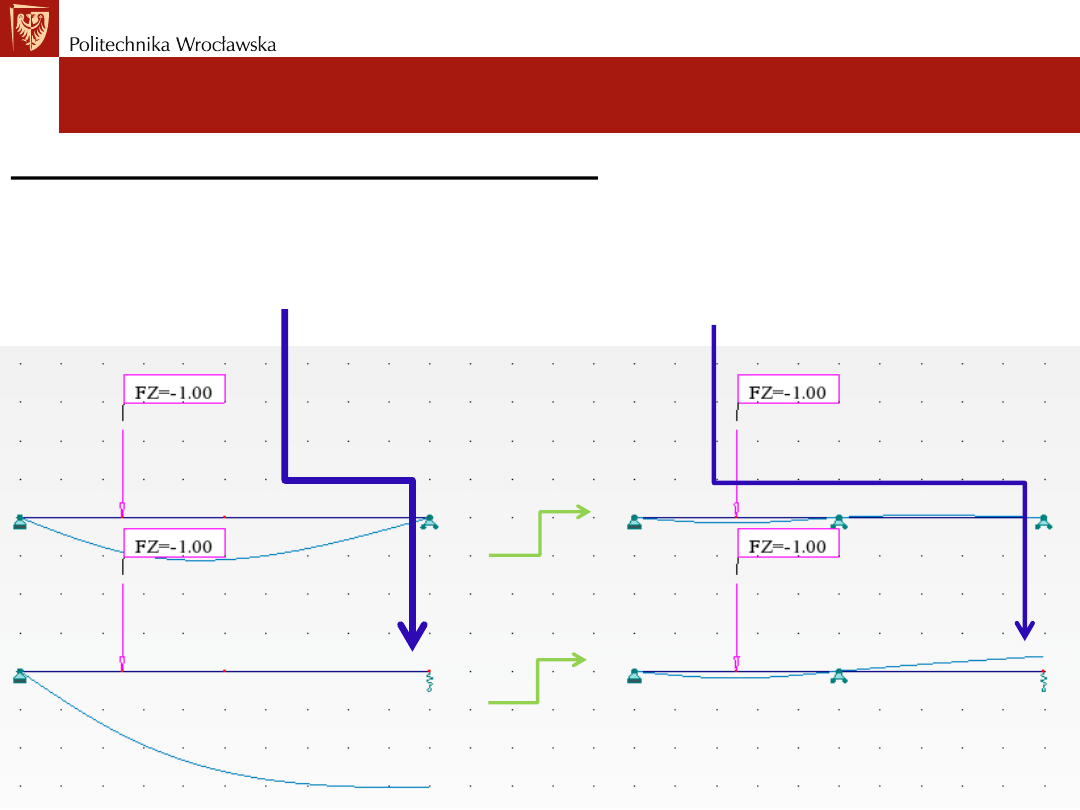
Więzi sprężyste w schemacie SW i SN:
W układach
SW
i
SN
przemieszczenia w danym schemacie statycznym na
podporach sprężystych są inne jak na podporach sztywnych. Podpory
sprężyste ściskają się (przem. w dół) lub też rozciągają (przem. w górę).
SW
SN
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Rodzaje więzi sprężystych
• Reakcje, siły wew. i przemieszczenia dla podpór sztywnych i
sprężystych w układach SW
• Reakcje, siły wew. i przemieszczenia dla podpór sztywnych i
sprężystych w układach SN
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Zasady prac wirtualnych dla więzi sprężystych
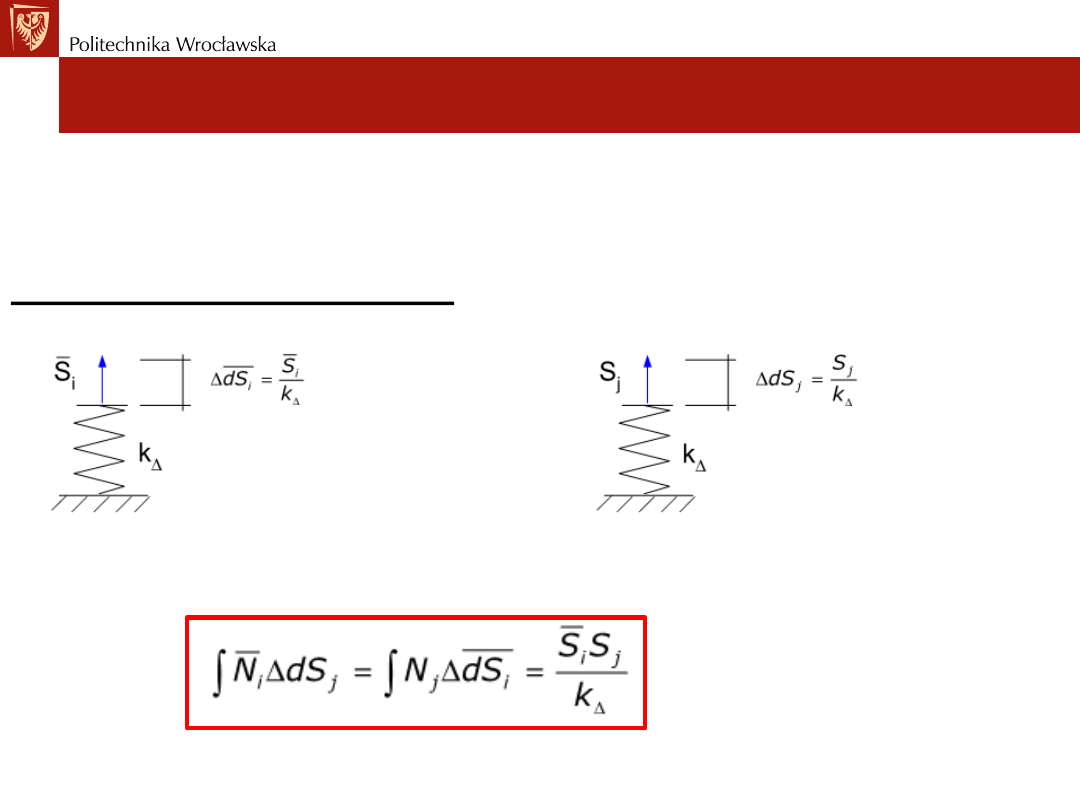
Wartości całek występujących w sformułowaniach zasady prac wirtualnych
dla więzu sprężystych.
• Oznaczmy przez „i” stan wirtualny, a przez „j” stan rzeczywisty.
1. Dla więzi translacyjnej:
Mamy:
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
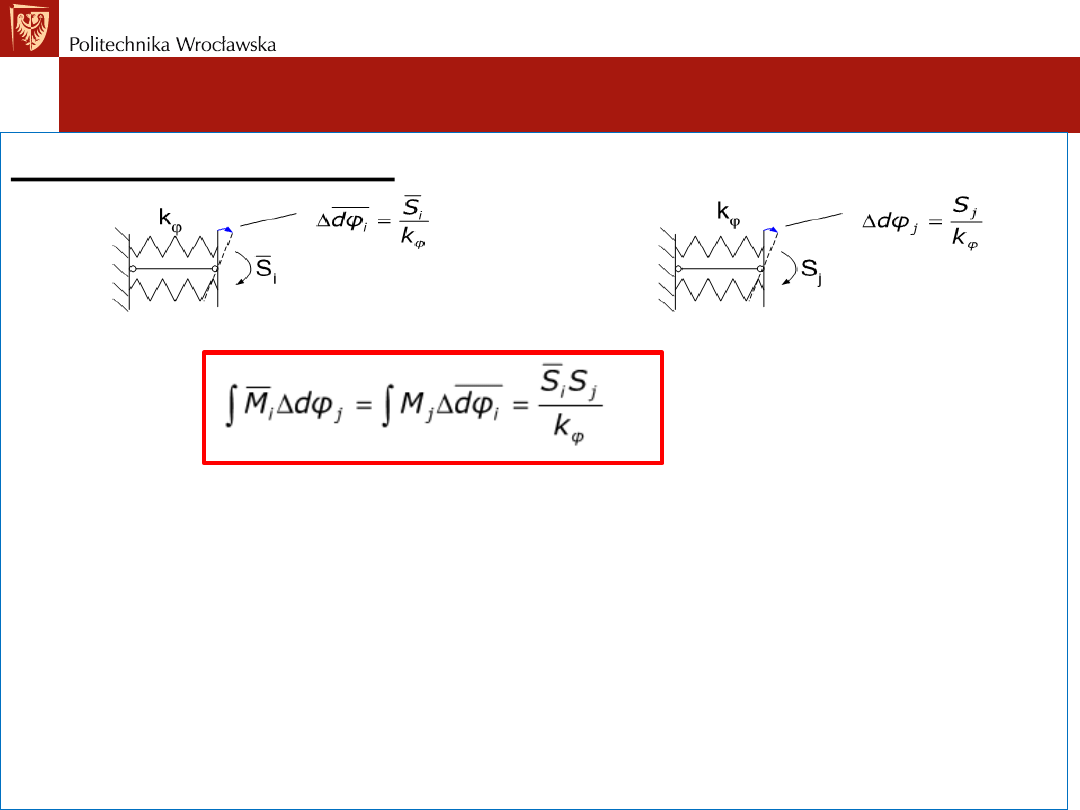
Zasady prac wirtualnych dla więzi sprężystych
2. Dla więzi rotacyjnej
Mamy:
Stany „i” obciążenia i przemieszczeń traktujemy jako wirtualne, a
stany „j” jako rzeczywiste
.
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Wyznaczanie przemieszczeń
Rozpatrujemy układ prętowy, na który działają obciążenia:
• mechaniczne w postaci
1. sił i momentów skupionych P [kN], M [kNm],
2. obciążeń i momentów równomiernie rozłożonych q [kN/m], m [kNm/m],
• niemechaniczne w postaci
1. przem. podpory [m],
2. wpływy termiczne [C],
3. błędy montażu [m].
Celem jest wyznaczenie przemieszczenia ∆
ip
w miejscu i na kierunku „i” od
przyłożonego obciążenia mechanicznego P i niemechanicznego ∆
i∆r
,
∆
iT
,
…etc.
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
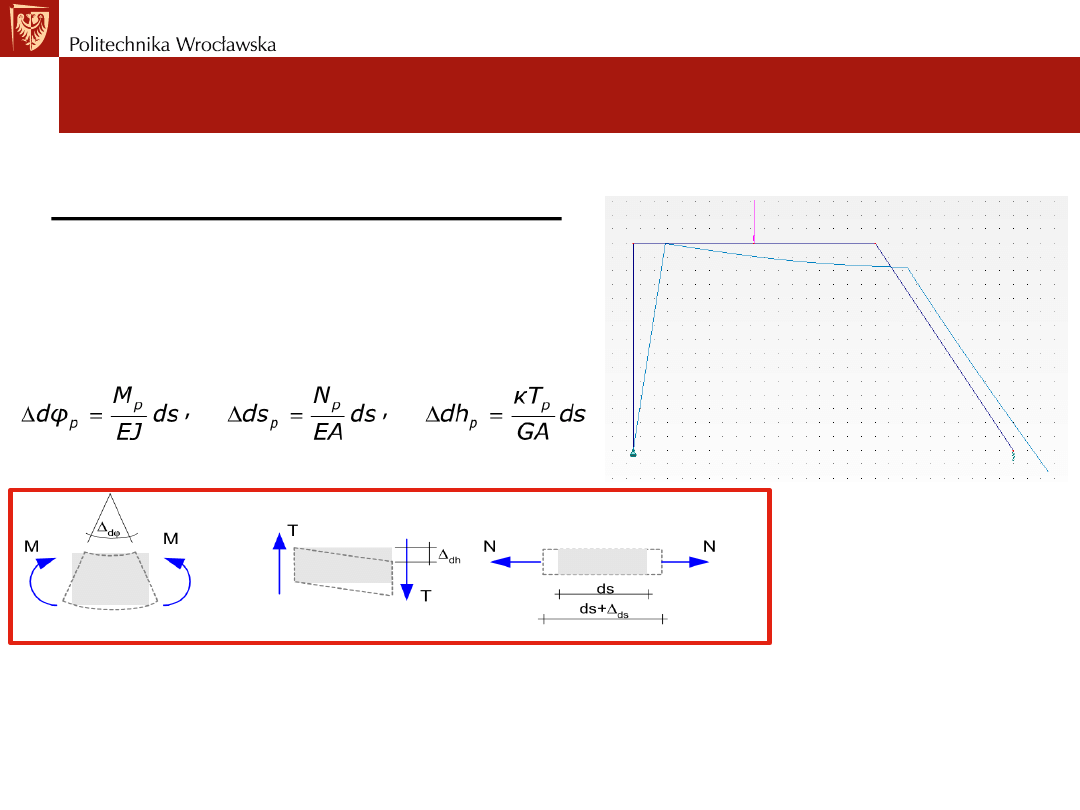
Wyznaczanie przemieszczeń
Obciążenia wywołują siły przekrojowe
𝑀
𝑝
,
𝑁
𝑝
,
𝑇
𝑝
oraz
odkształcenia układu prętowego:
1. kątowe (obrót o kąt) ,
2. wzdłuż osi pręta (wydłużenie),
3. prostopadłe do osi (postaciowe).
Obowiązuje:
1) Prawo Hooka 2) warunki kinematyczne układu nie ulegają zmianie w
trakcie trwania obciążenia - ukł. Clapeyrona
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
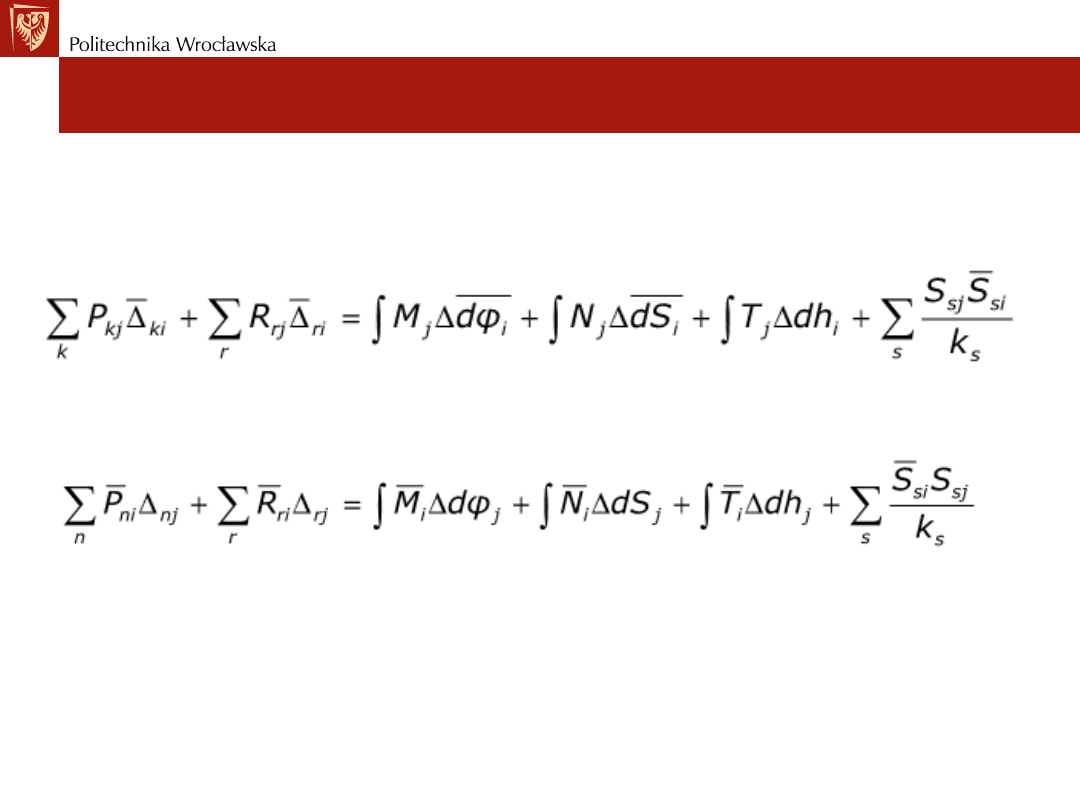
Zasady prac wirtualnych dla więzi sprężystych
Pierwsza i druga zasada prac wirtualnych z uwzględnieniem więzi
sprężystych przedstawia się następująco:
Zasada I:
Zasada II
We wzorach indeks „s” oznacza sumowanie po więziach sprężystych
(rotacyjnych i translacyjnych)
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Wyznaczanie przemieszczeń
Rozpatrujemy układ prętowy, na który działają obciążenia
mechaniczne (w postaci P, q, M), które wywołują siły przekrojowe
𝑀
𝑝
,
𝑁
𝑝
,
𝑇
𝑝
oraz odkształcenia układu prętowego:
Celem jest wyznaczenie przemieszczenia ∆
ip
w miejscu i na
kierunku „i” od przyłożonego obciążenia mechnicznego P.
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
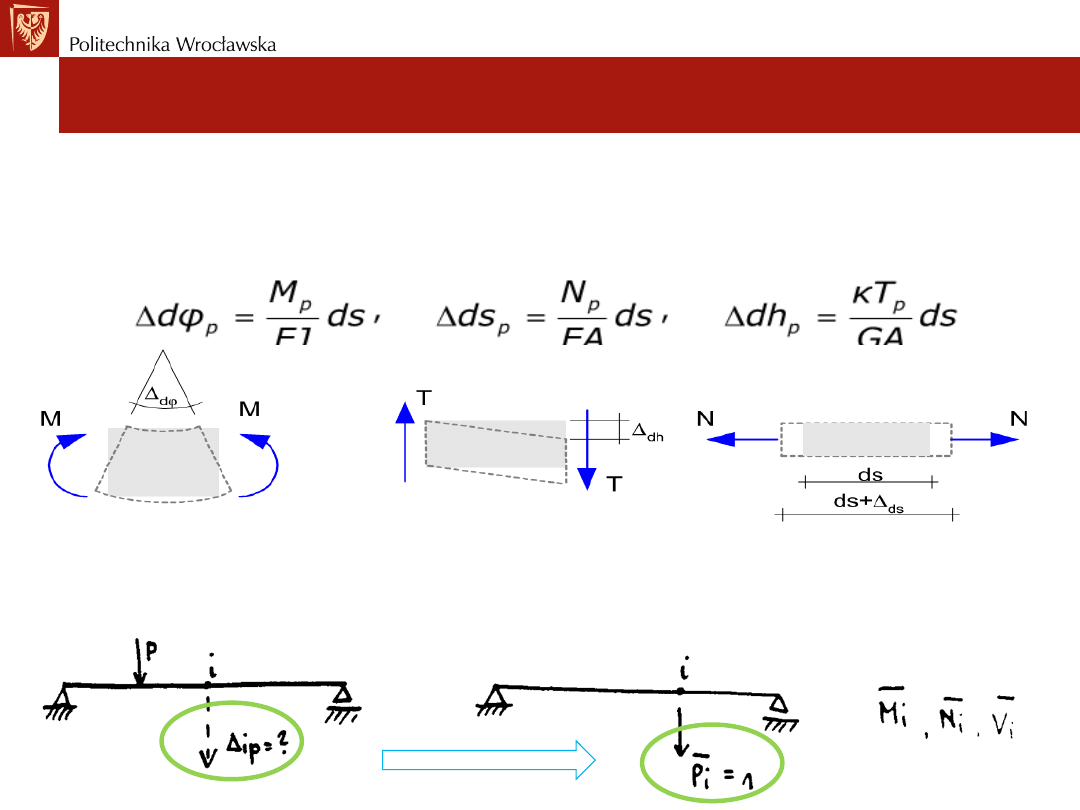
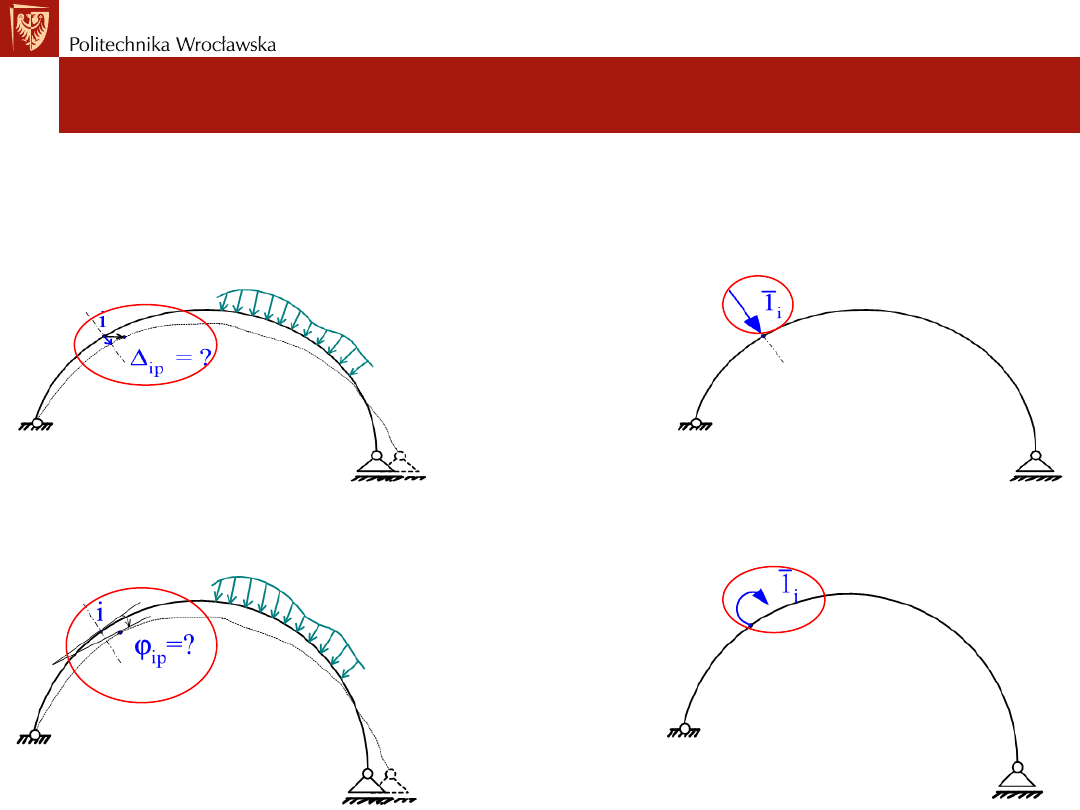
Wyznaczanie przemieszczeń
Wzór na wyznaczenie przemieszczenia
∆
𝒊𝒑
w miejscu i na kierunku „i” układu
prętowego od obciążenia mechanicznego (P, q, M):
1. Przykładamy jednostkowe obciążenie wirtualne
𝑷
𝒊
=
𝟏
𝒊
(tylko siła
jednostkowa) w miejscu i na kierunku „i” układu prętowego któremu
odpowiadają wirtualne siły przekrojowe
𝑴
𝒊
,
𝑵
𝒊
,
𝑻
𝒊
.
2. Praca wirtualna układu prętowego dla
𝑃
𝑖
=
1
𝑖
i sił przekrojowych
𝑀
𝑖
,
𝑁
𝑖
,
𝑇
𝑖
na rzeczywistych przemieszczeniach ∆
𝑖𝑝
oraz odkształceniach ∆𝑑𝜑
𝑝
,
∆𝑑𝑠
𝑝
i
∆𝑑ℎ
𝑝
, dla przyjętego
𝑃
𝑛𝑖
=
1
𝑖
oraz symbolu „j” zastąpionego
symbolem „p”. Z II zasady prac wirtualnych otrzymuje się wzór
Maxwella-Mohra na przemieszczenie
∆
𝒊𝒑
:
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
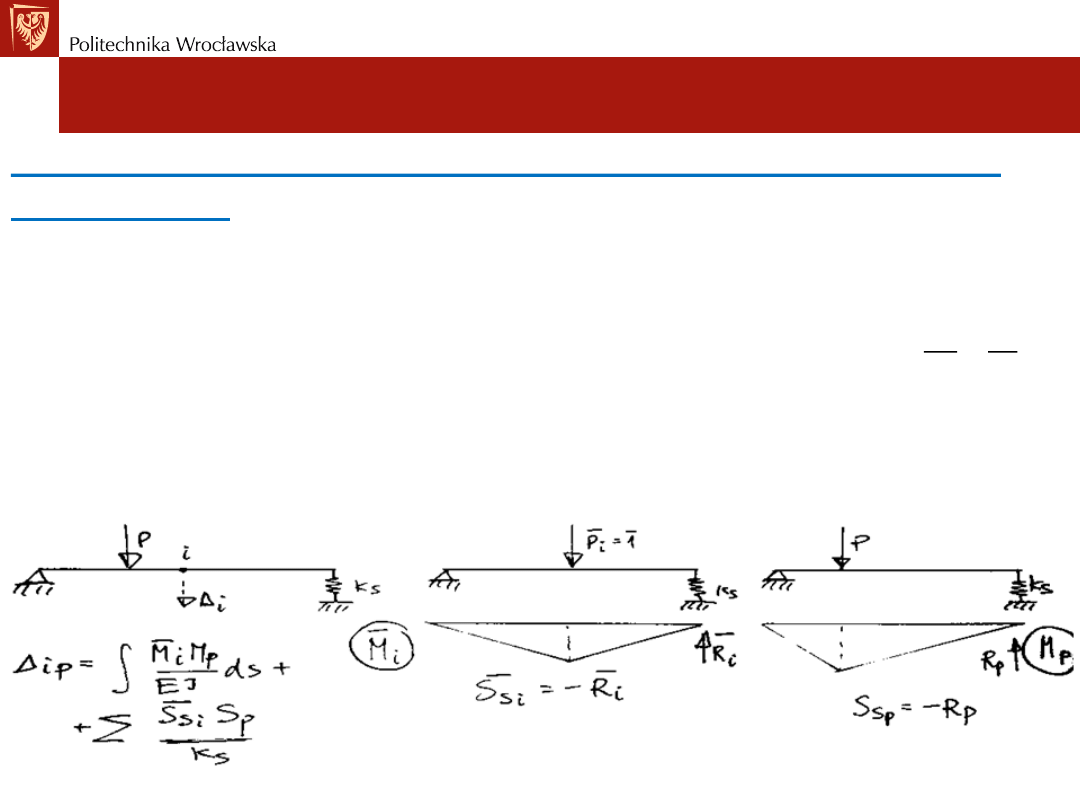
Wyznaczanie przemieszczeń
Dla belek i ram wpływ sił osiowych i sił tnących na przemieszczenia
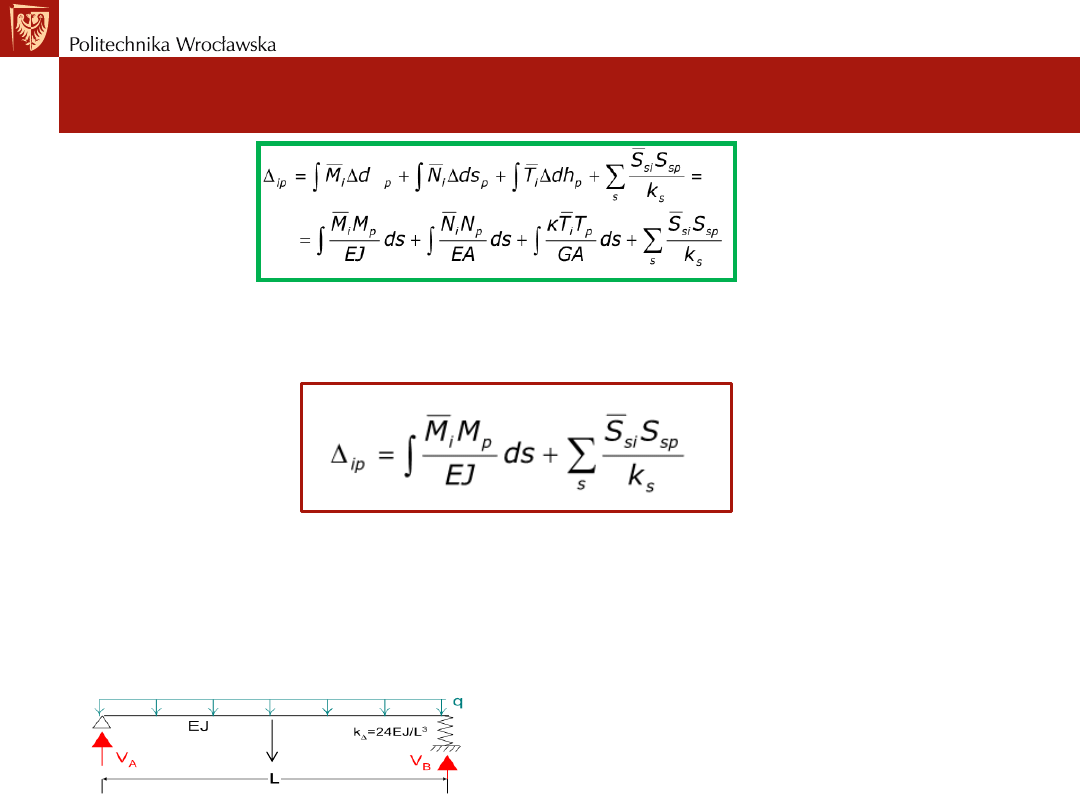
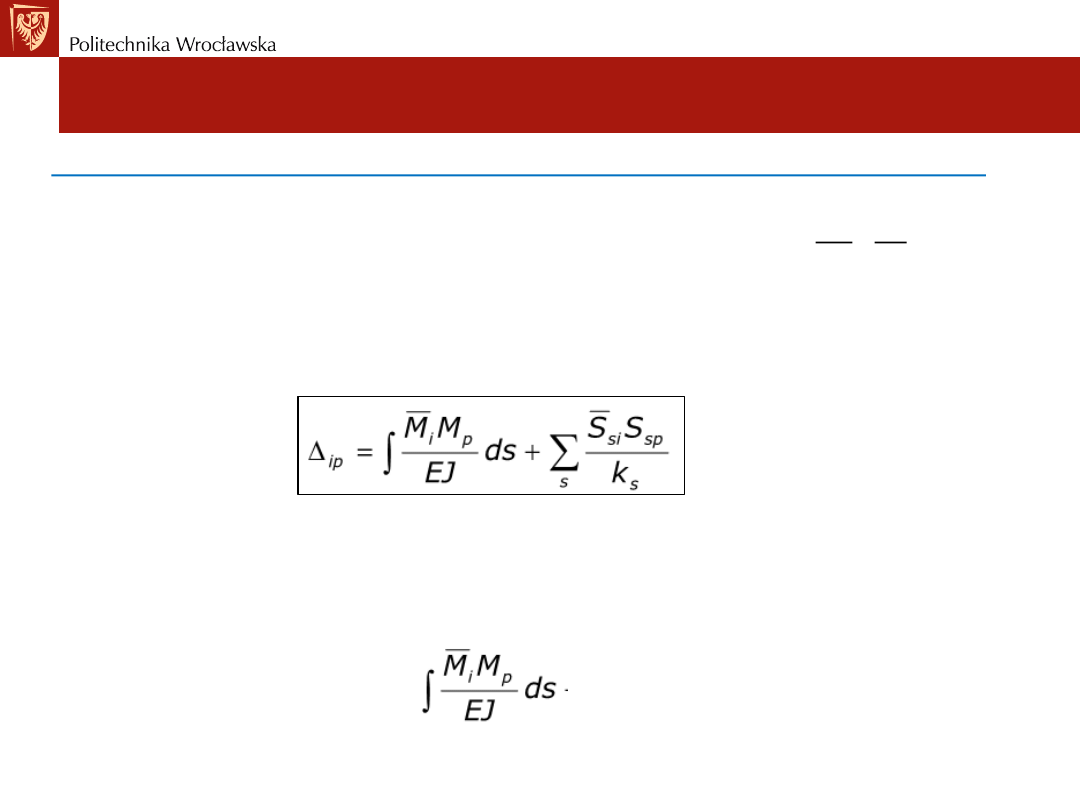
jest pomijalnie mały. Wzór na wyznaczanie przemieszczeń
∆
𝒊𝒑
ma
postać:
• Całki w powyższych wzorach dotyczą całego ustroju prętowego
(wszystkich prętów).
Algorytm wyznaczania przemieszczenie
∆
𝑖𝑝
dla ustroju prętowego
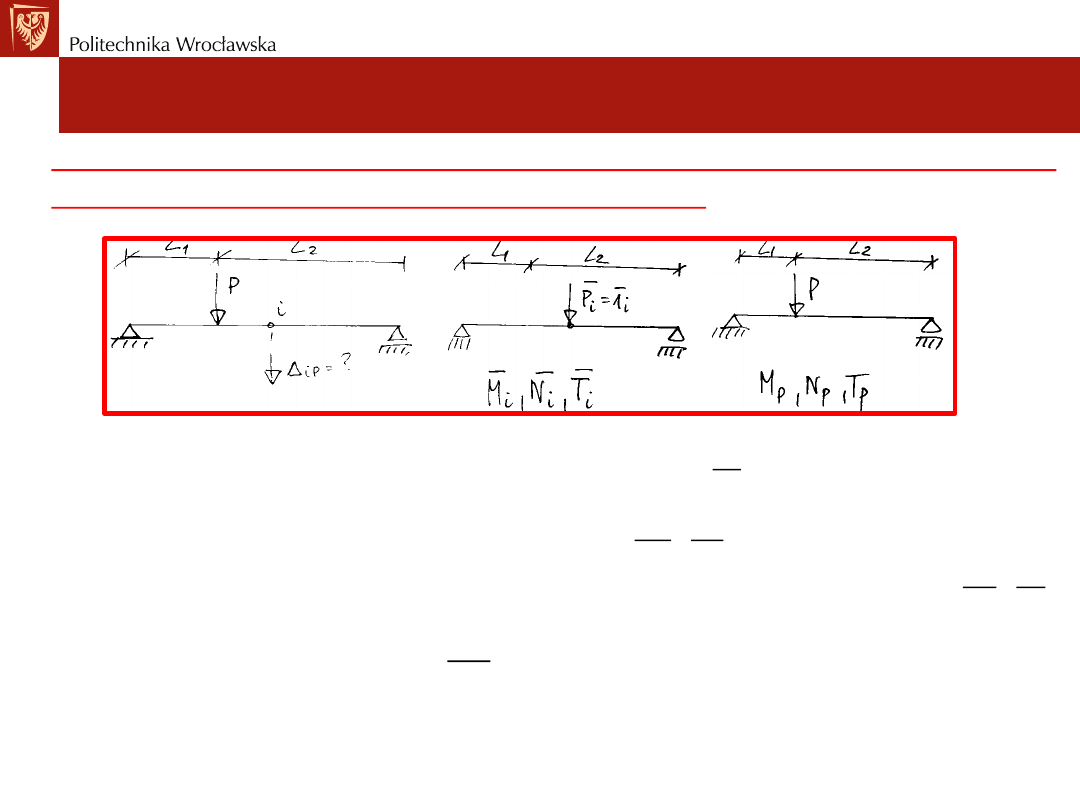
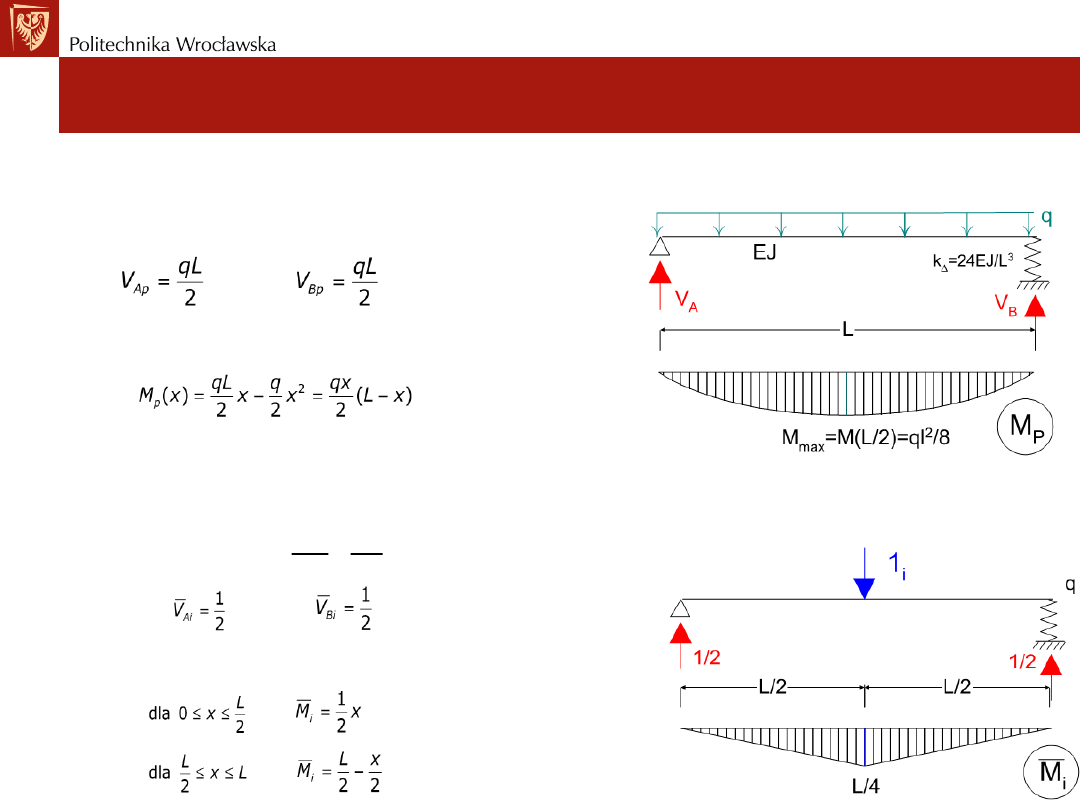
(rama, belka): Obliczenie przemieszczeń w środku belki
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Wyznaczanie przemieszczeń
1) Wyznaczenie sił przekrojowych
𝑀
𝑝
(𝑁
𝑝
,
𝑇
𝑝
) i reakcji w więziach
sprężystych
𝑆
𝑝
od obciążenia danego,
2) Przyłożenie jednostkowego obciążenia wirtualnego
𝑃
𝑖
= 1
𝑖
w
miejscu i kierunku „i” oraz wyznaczeniu wirtualnych sił
przekrojowych
𝑀
𝑖
,
𝑁
𝑖
,
𝑉
𝑖
i reakcji 𝑅
𝑖
oraz w więziach sprężystych
𝑆
𝑖
,
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Wyznaczanie przemieszczeń
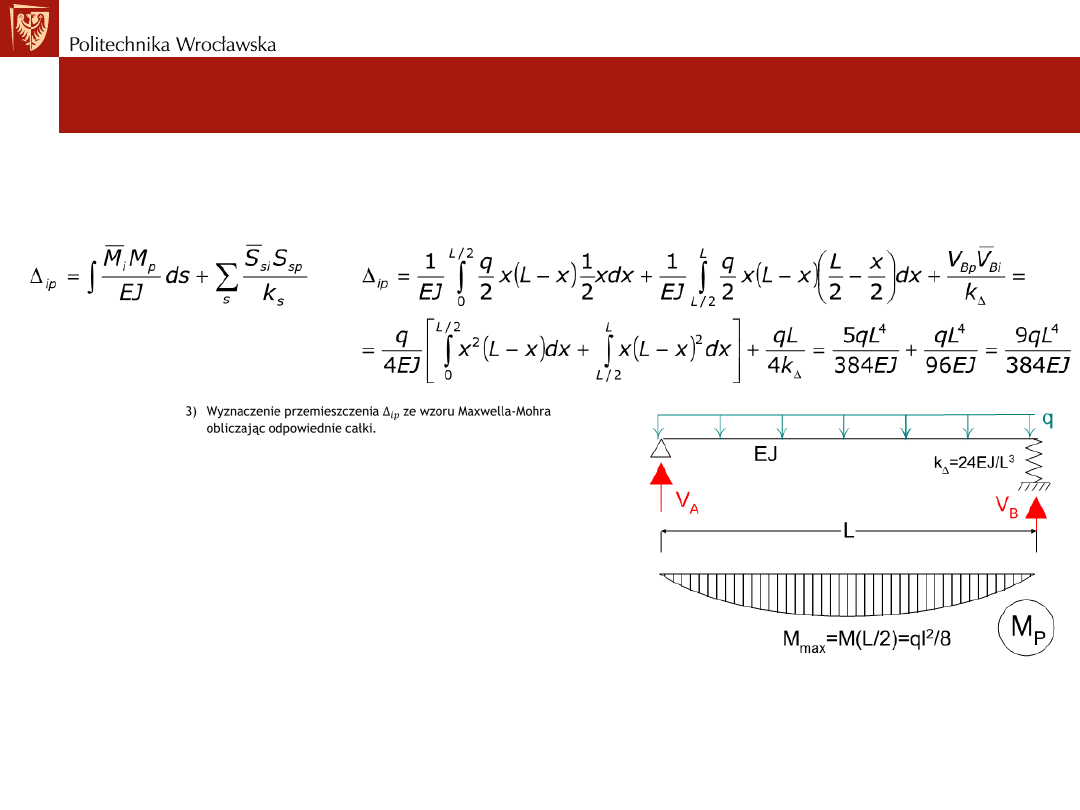
3) Wyznaczenie przemieszczenia
∆
𝑖𝑝
ze wzoru Maxwella-Mohra
obliczając odpowiednie całki.
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Wyznaczanie przemieszczeń
Algorytm wyznaczyć przemieszczenie
∆
𝒊𝒑
dla ustroju prętowego
(rama, belka):
1. Wyznaczenie sił przekrojowych
𝑀
𝑝
(𝑁
𝑝
,
𝑇
𝑝
) oraz reakcji
𝑅
𝑝
i
𝑆
𝑝
od
obciążenia danego
2. Przyłożenie jednostkowego obciążenia wirtualnego
𝑃
𝑖
= 1
𝑖
w miejscu i
kierunku „i” oraz wyznaczeniu wirtualnych sił przekrojowych
𝑀
𝑖
, (
𝑁
𝑖
,
𝑇
𝑖
)
oraz reakcji
𝑅
𝑖
i 𝑆
𝑖
,
3. Wyznaczenie przemieszczenia
∆
𝑖𝑃
na podstawie wzoru z zasady prac
wirtaulnych
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
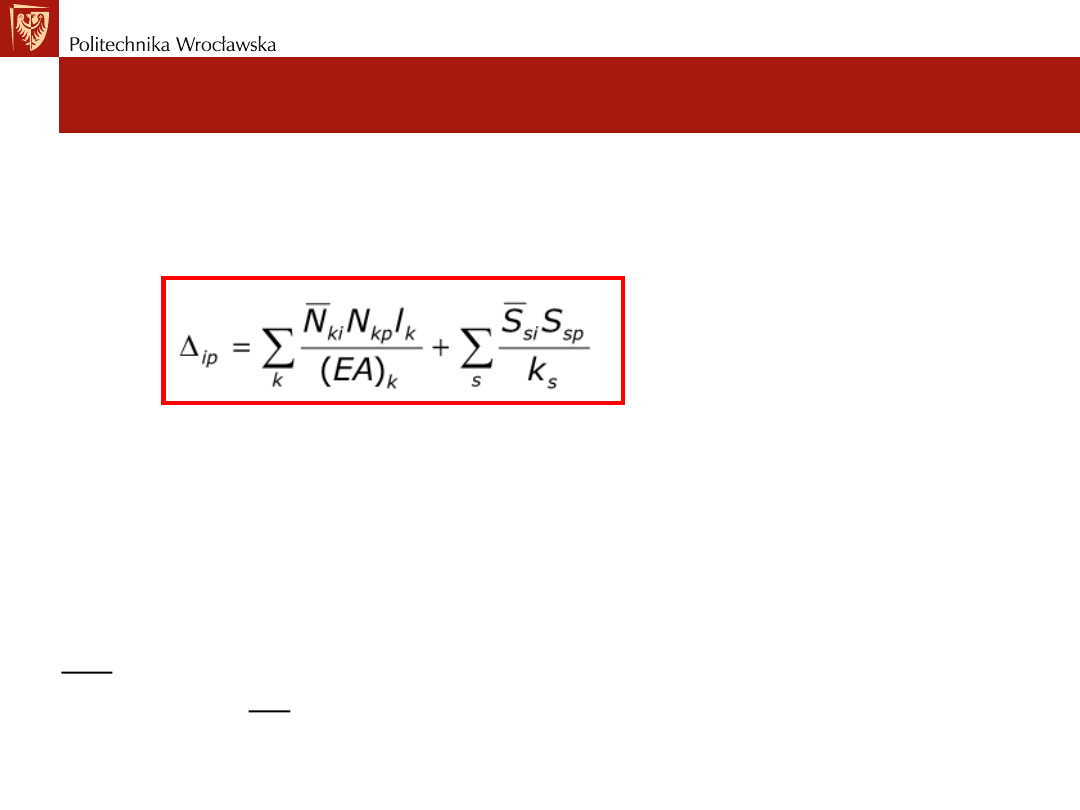
Wyznaczanie przemieszczeń
W przypadku wyznaczania przemieszczenia w kratownicach wzór
ulega modyfikacji: występują tylko siły osiowe i są one stałe na
całej długości pręta. Stąd mamy :
- k określa numer każdego pręta,
- l
k
i (EA)
k
odpowiednio długość i sztywność osiową na
rozciąganie (ściskanie) każdego pręta k,
- 𝑁
𝑘𝑝
siły osiowe dla każdego pręta k i reakcje w więziach
sprężystych
𝑆
𝑠𝑝
od obciążenia danego,
-
𝑁
𝑘𝑖
siły osiowe dla każdego pręta k i reakcje w więziach
sprężystych
𝑆
𝑠𝑖
od jednostkowego obciążenia wirtualnego
𝑃
𝑖
=
1
𝑖
w miejscu i kierunku „i”.
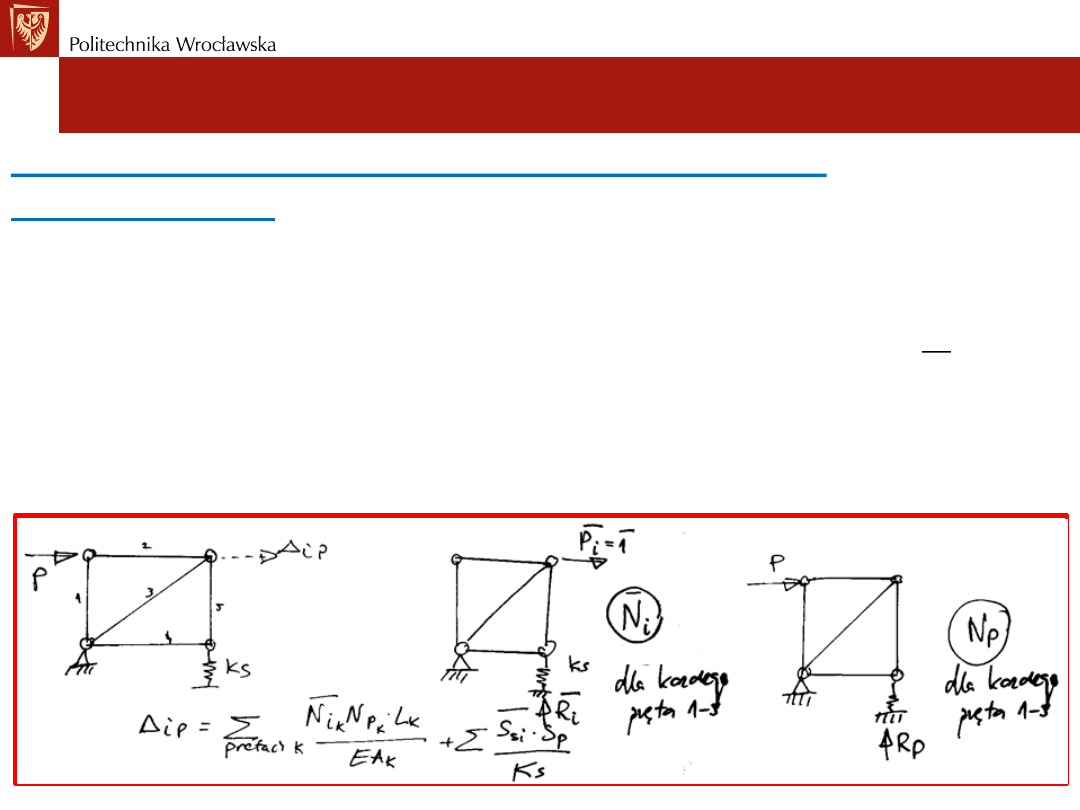
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Wyznaczanie przemieszczeń
Algorytm wyznaczyć przemieszczenie
∆
𝒊𝒑
dla ustroju
kratownicowego:
1. Wyznaczenie sił przekrojowych
𝑁
𝑝
oraz reakcji 𝑅
𝑝
i
𝑆
𝑝
od obciążenia
danego,
2. Przyłożenie jednostkowego obciążenia wirtualnego
𝑃
𝑖
= 1
𝑖
w miejscu i
kierunku „i” oraz wyznaczeniu wirtualnych sił przekrojowych
𝑁
𝑖
oraz
reakcji
𝑅
𝑖
i 𝑆
𝑖
,
3. Wyznaczenie przemieszczenia
∆
𝑖𝑃
na podstawie wzoru z zasady prac
wirtualnych
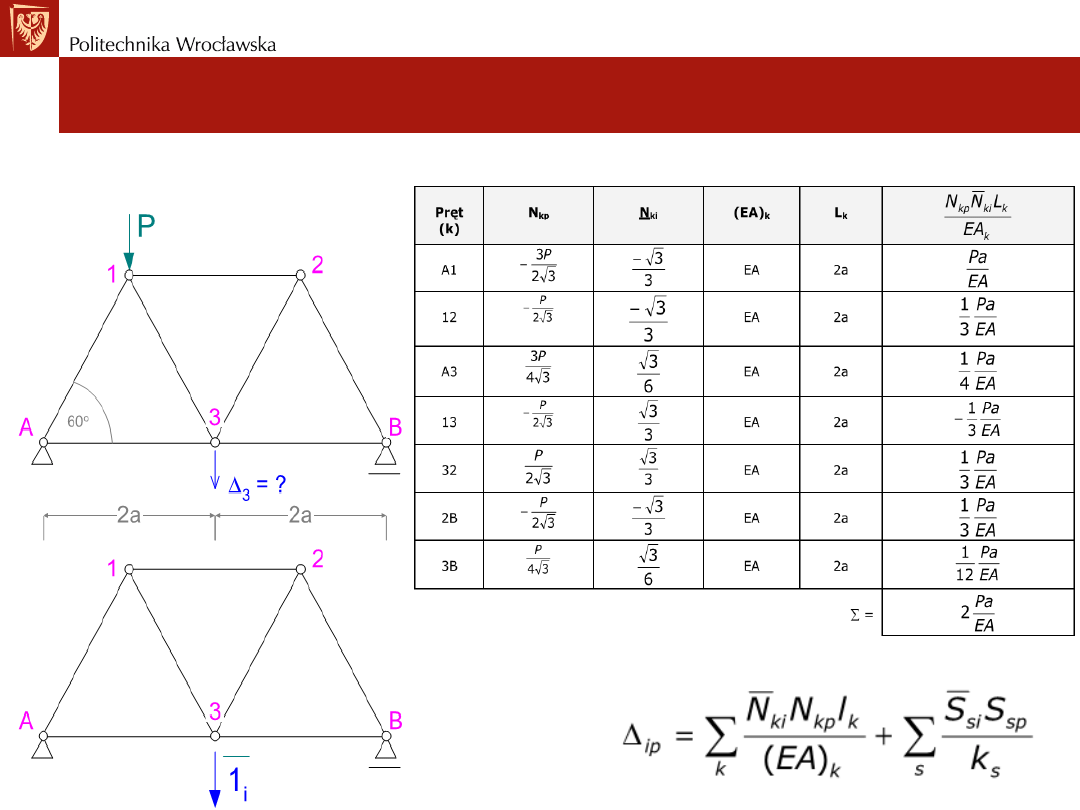
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
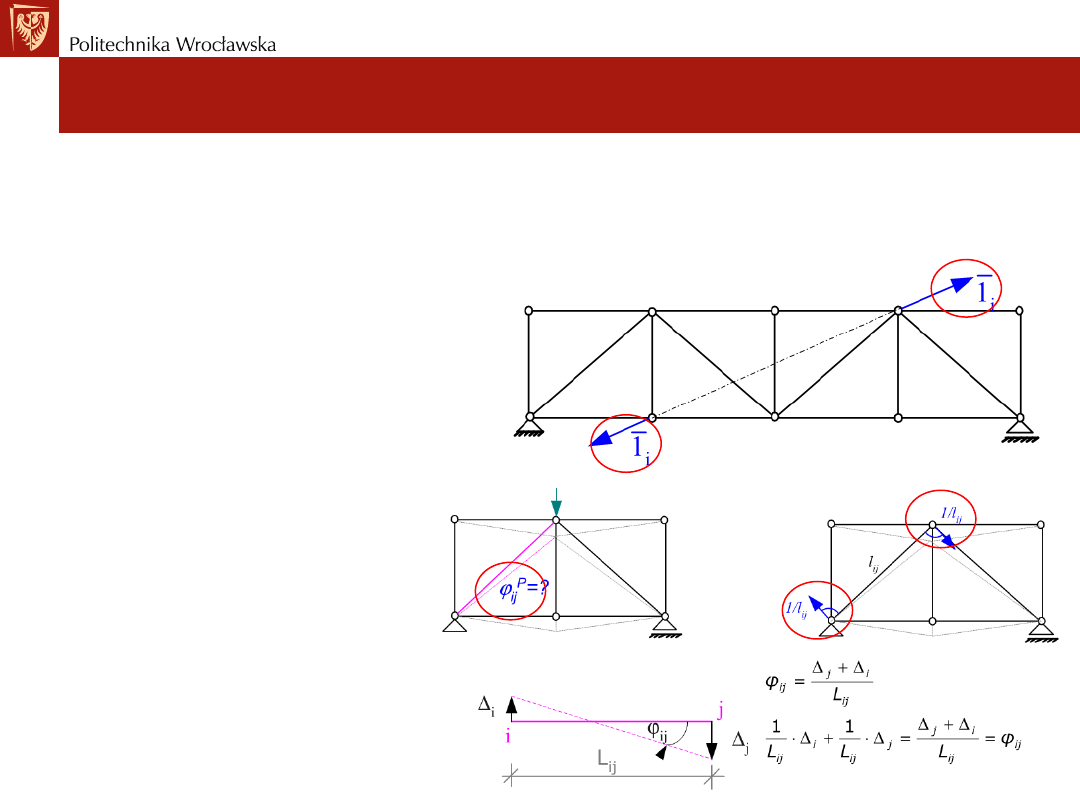
Wyznaczanie przemieszczeń
Obliczenie przemieszczeń w środku kratownicy
Szukane przemieszczenia:
• przesunięcia poziome i pionowe,
• kąty obrotu prętów,
• zmiany odległości między węzłami, katą miedzy stycznymi.
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Stany jednostkowe
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Stany jednostkowe
Można rozpatrywać przemieszczenie w konkretnym miejscu i na
konkretnym kierunku, ale także jako sume przemieszczeń zgodnie ze
wzorem:
Jak wyznaczyć przemieszczenia?
Należy przyłożyć w miejscu i na kierunku poszukiwanego
przemieszczenia:
• jednostkową siłę
𝑷
𝒊
=
𝟏
𝒊
w przypadku szukanego przesunięcia, zmiany
odległości miedzy węzłami,
• jednostkowy moment zginający
𝑴
𝒊
=
𝟏
𝒊
w przypadku szukanego kąta
obrotu, zmiany kąta między stycznymi.
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
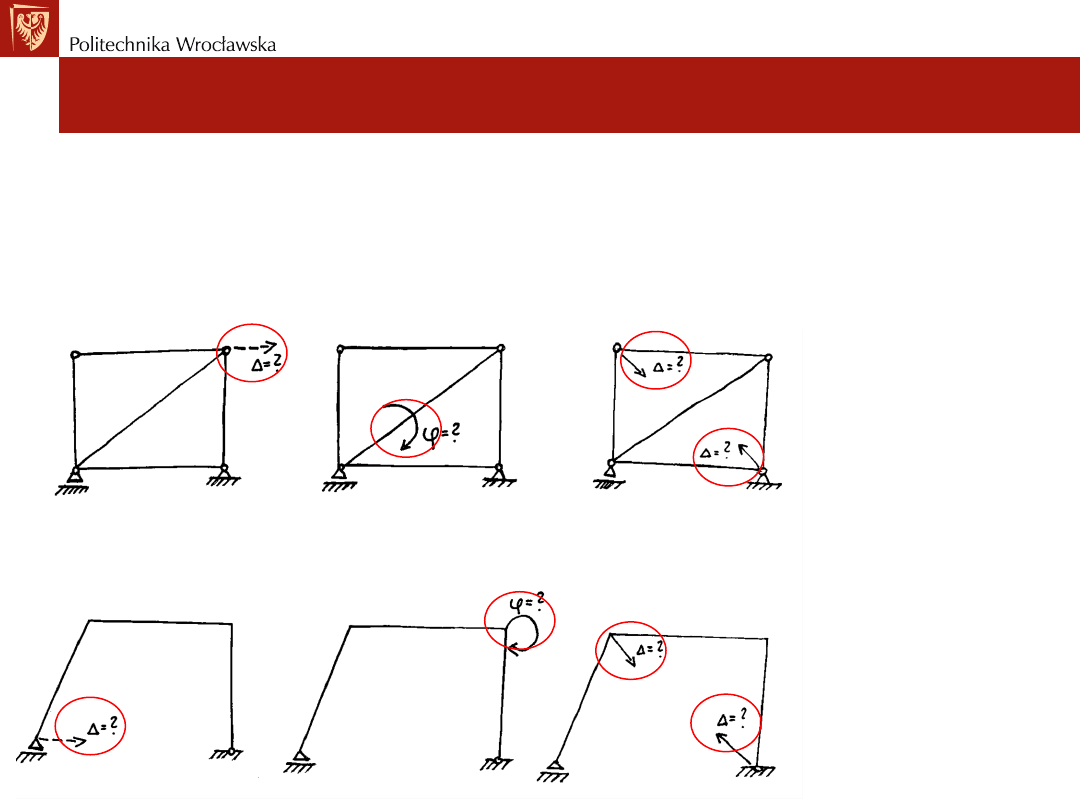
Stany jednostkowe
Stany jednostkowe dla konstrukcji ramowych jakie należy
przyjmować dla różnych szukanych typów przemieszczeń:
• przesunięcie punktu (węzła)
• kąt obrotu pręta
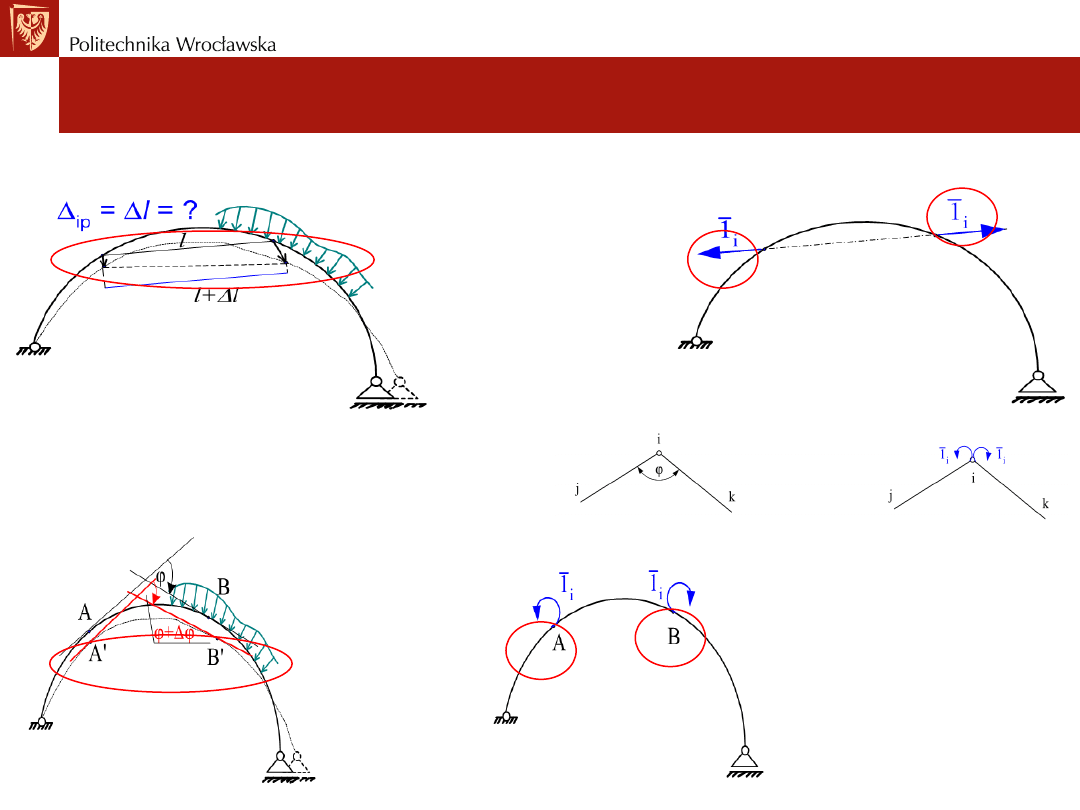
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Stany jednostkowe
• zmiana odległości pomiedzy punktami
• zmiana kąta między stycznymi
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Stany jednostkowe
Stany jednostkowe dla konstrukcji kratownicowych jakie należy
przyjmować dla różnych szukanych typów przemieszczeń:
• Przesunięcie i zmiana odległości między prętami
• kąt obrotu pręta
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Metody obliczania całek
Aby wyznaczyć szukane przemieszczenie należy wyznaczyć:
• wykresy sił przekrojowych od obciążeń mechanicznych
𝑀
𝑝
,
𝑁
𝑝
,
𝑇
𝑝
,
• wykresy sił przekrojowych od stanu jednostkowego
𝑀
𝑖
,
𝑁
𝑖
,
𝑇
𝑖
,
• oblczyć przemieszczenie jako odpowiednie całki iloczynu funkcji sił
wewnętrznych tj. wykresów sił wewnętrznych w postaci
Poniżej podane są reguły, które pozwalają w łatwy sposób obliczać
całki występujące we wzorach określających przemieszczenie.
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Metody obliczania całek
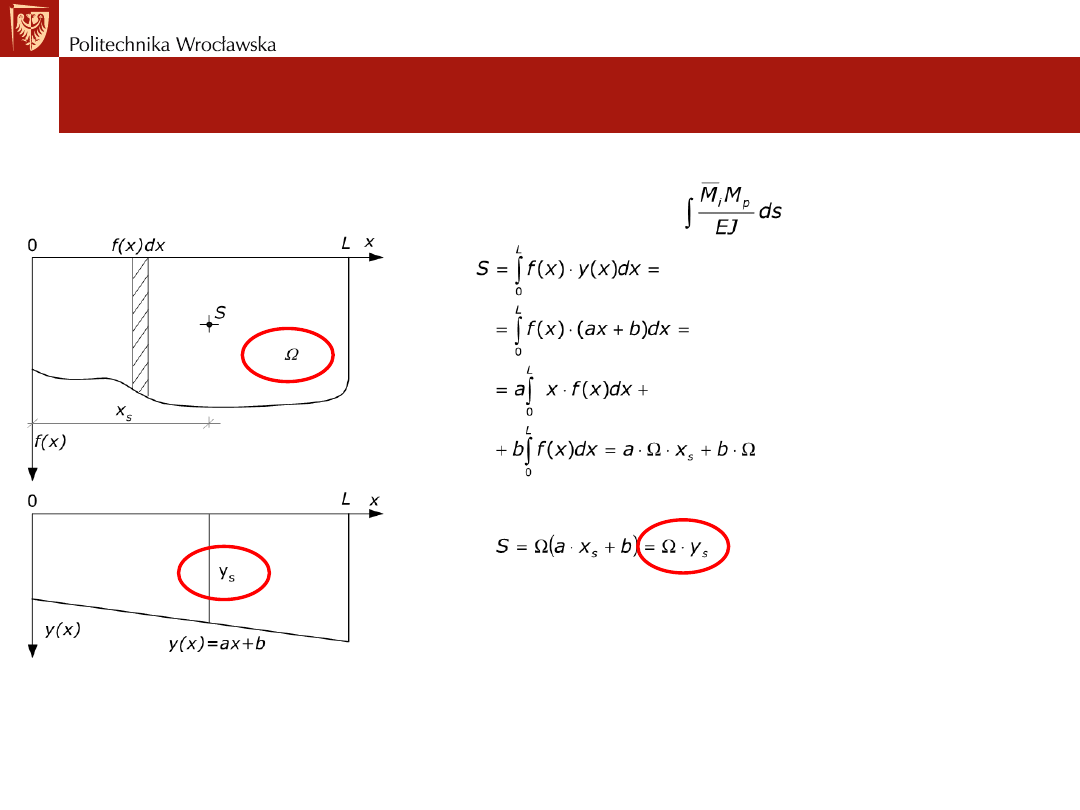
Wyznaczanie całki oznaczonej iloczynu dwóch funkcji f(x) i y(x)
jak np. iloczynu wykresów momentów w postaci
gdzie x
s
- położenie środka ciężkości pola wykresu f(x),
y
s
– rzędna funkcji y(x) w miejscu środka pola S,
Ω – pole pomiędzy osią x, a f(x).
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Metody obliczania całek
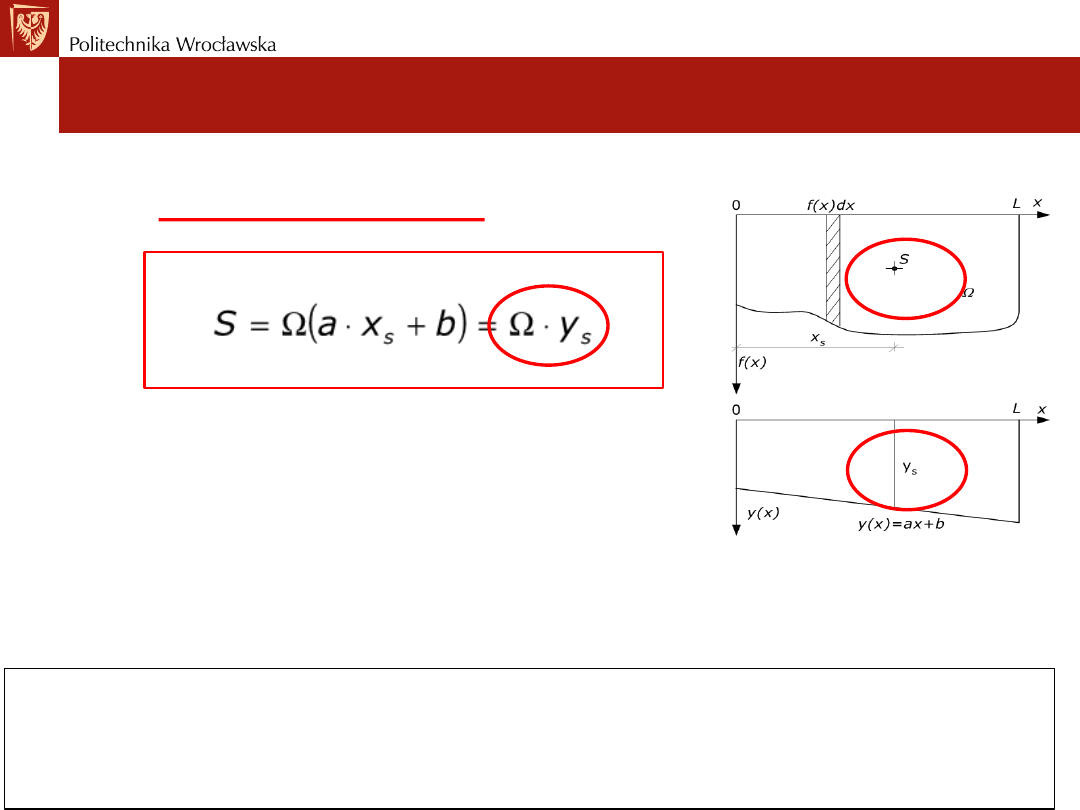
Wzór na obliczenie całki dwóch funkcji znany jest jako
wzór Wereszczagina.
Całkę obliczamy od 0 do L.
• Warunki dla stosowania wzoru Wereszczagina:
1) funkcja ciągła f(x) może być dowolna ale nieujemna,
2) funkcja y(x) musi być liniowa określona wzorem y(x)=ax+b.
Całka iloczynu funkcji dowolnej i funkcji liniowej równa się
iloczynowi pola Ω ograniczonego funkcją dowolną i rzędnej ys
funkcji liniowej pod środkiem ciężkości pola Ω.
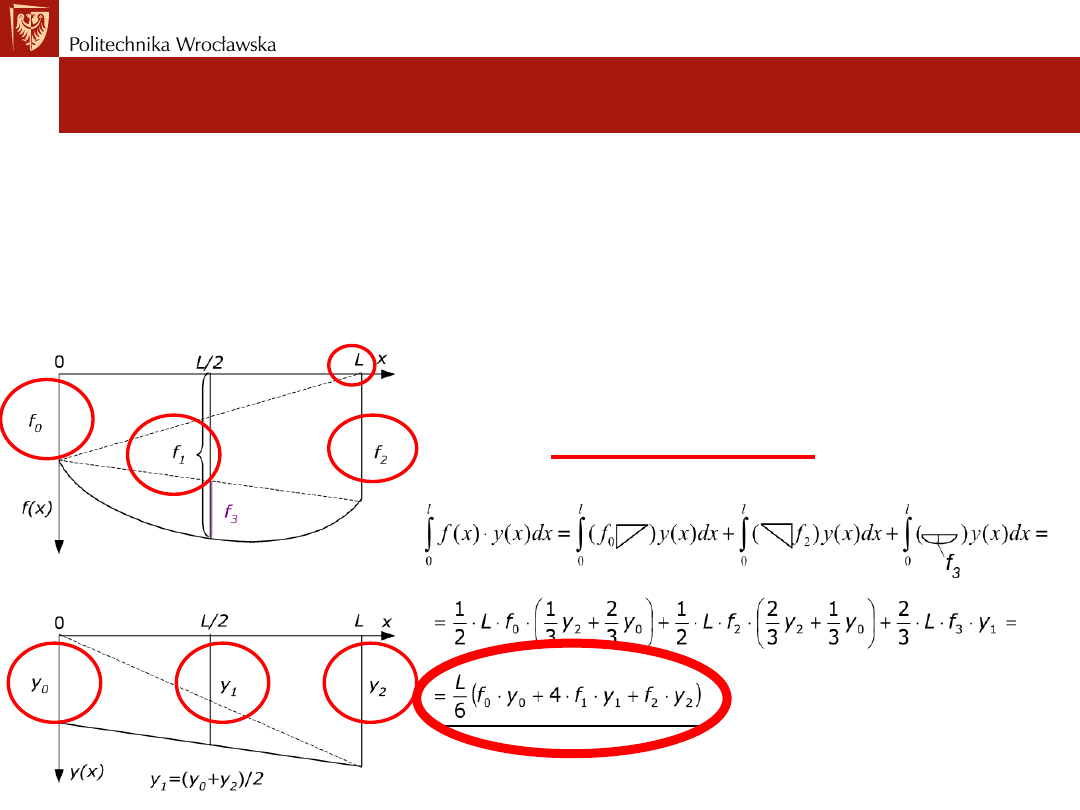
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Metody obliczania całek
Przypadek szczególny - funkcja f(x) jest parabolą.
Funkcje f(x) rozkłada się na sumę dwóch wykresów trójkątnych oraz
parabolę, której pole równa się 2/3 pola odpowiedniego f(x) prostokąta
przedstawimy to w sposób wykreślny i skorzystamy ze wzoru
Wereszczagina.
Wzór na obliczenie całki dwóch funkcji:
wzór Simpsona.
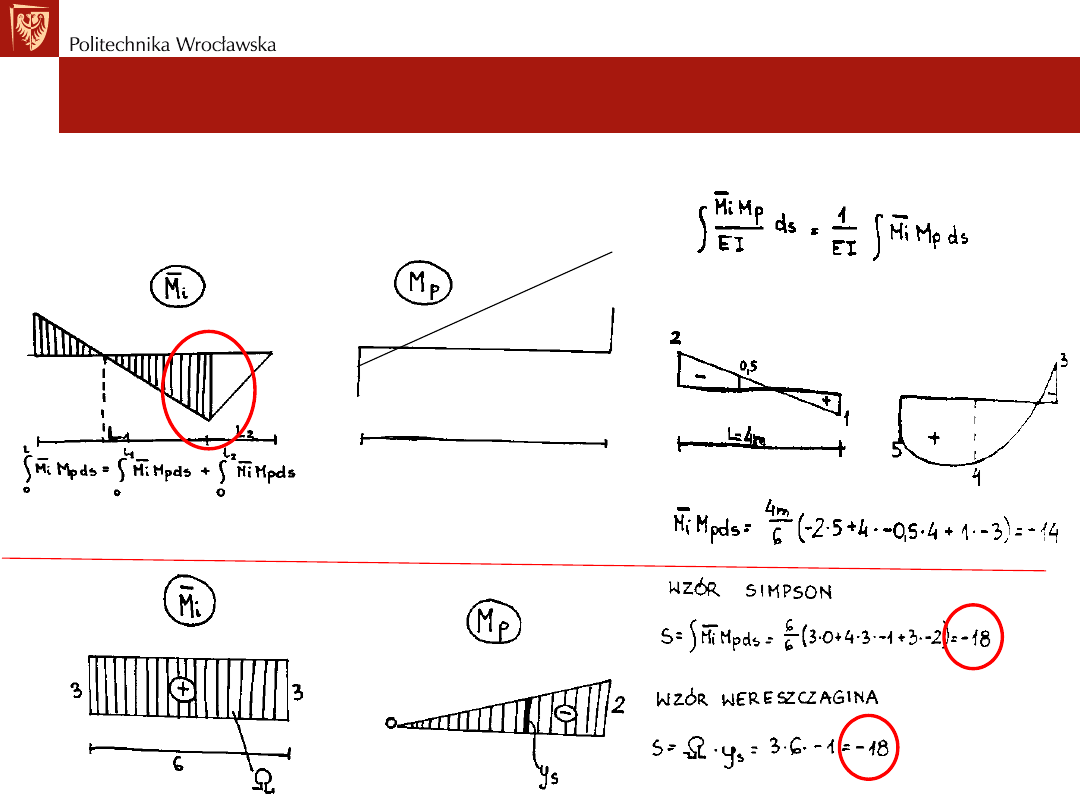
Wyznaczanie przemieszczeń. Układy statycznie wyznaczalne
Metody obliczania całek
Przykład nr1: dzielenie wykresów Przykład nr2.
Metoda Simpsona
w miejscu załamania lub skoku wykresu
Przykład nr3
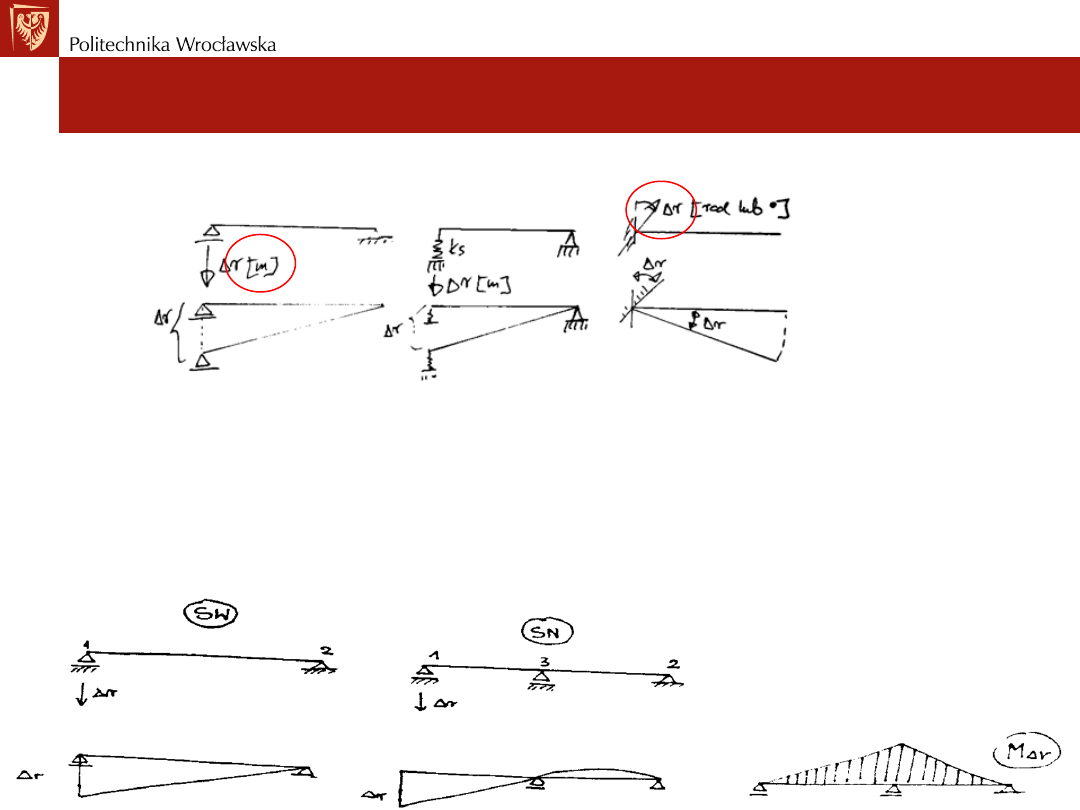
Wyznaczanie przemieszczeń w układach SW
Przemieszczenia wywołane wpływem podpór
Zakładamy, że przynajmniej jedna podpora ulega przemieszczeniu.
Oznaczamy przez ∆r przemieszczenia podpór.
Przemieszczenia podpór w układach:
• SW nie wywołuja sił przekrojowych i powodują przemieszczenie układu,
• SN wywołują siły przekrojowe
𝑀
∆
,
𝑁
∆
, 𝑉
∆
oraz siły w więziach
sprężystych
𝑆
∆
i powodują przemieszczenie układu.
Wyznaczanie przemieszczeń w układach SW
Przemieszczenia wywołane wpływem podpór
Przyjmijmy w miejscu i kierunku i szukanego przemieszczenia
jednostkowe obciążenie wirtualne
𝑃
𝑖
= 1
𝑖
, któremu odpowiadają
wirtualne reakcje
𝑅
𝑖
, siły w więziach sprężystych 𝑆
𝑠𝑖
oraz siły
przekrojowe
𝑀
𝑖
,
𝑁
𝑖
,
𝑇
𝑖
.
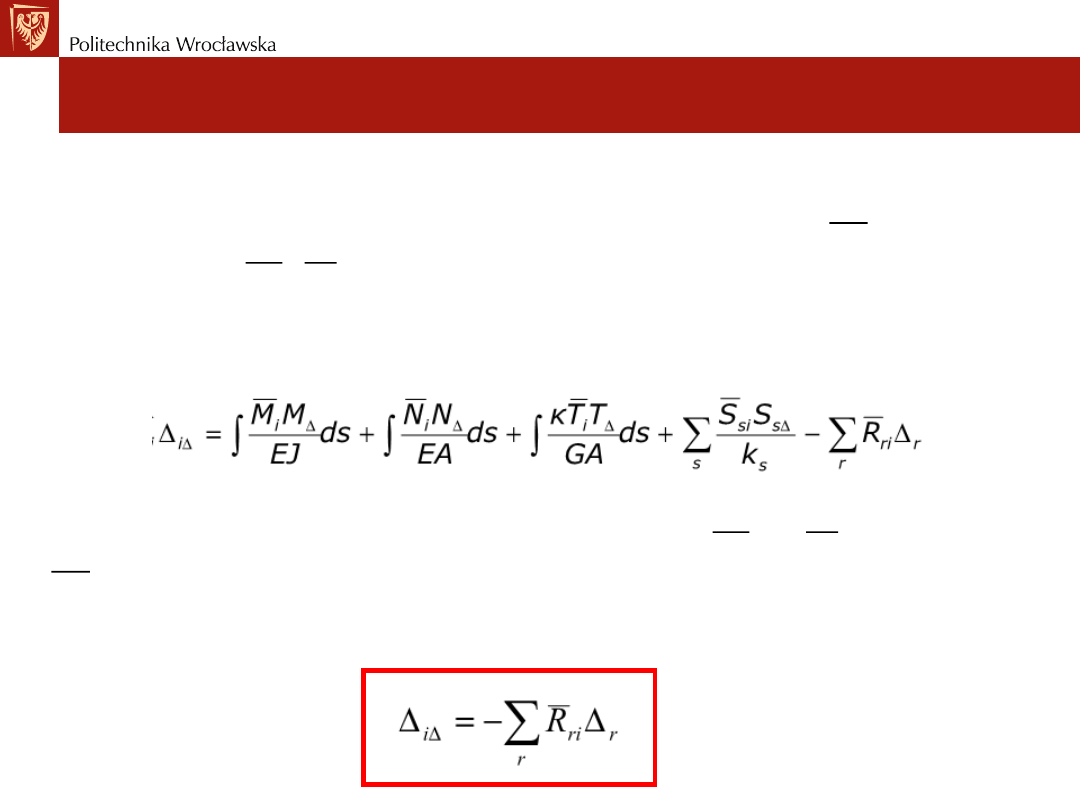
• Wykorzystując II zasadę pracy wirtualnej otrzymujemy zależność
dla szukanego przemieszczenia:
• Ponieważ dla układów SW przemieszczenie podpór nie wywołuje
sił przekrojowych i sił w więziach, a więc
𝑀
𝑖
=0,
𝑁
𝑖
=0,
𝑇
𝑖
=0 oraz
𝑆
𝑠𝑖
=0.
• Wzór na przemieszczenie od osiadania podpory jest w
postaci:
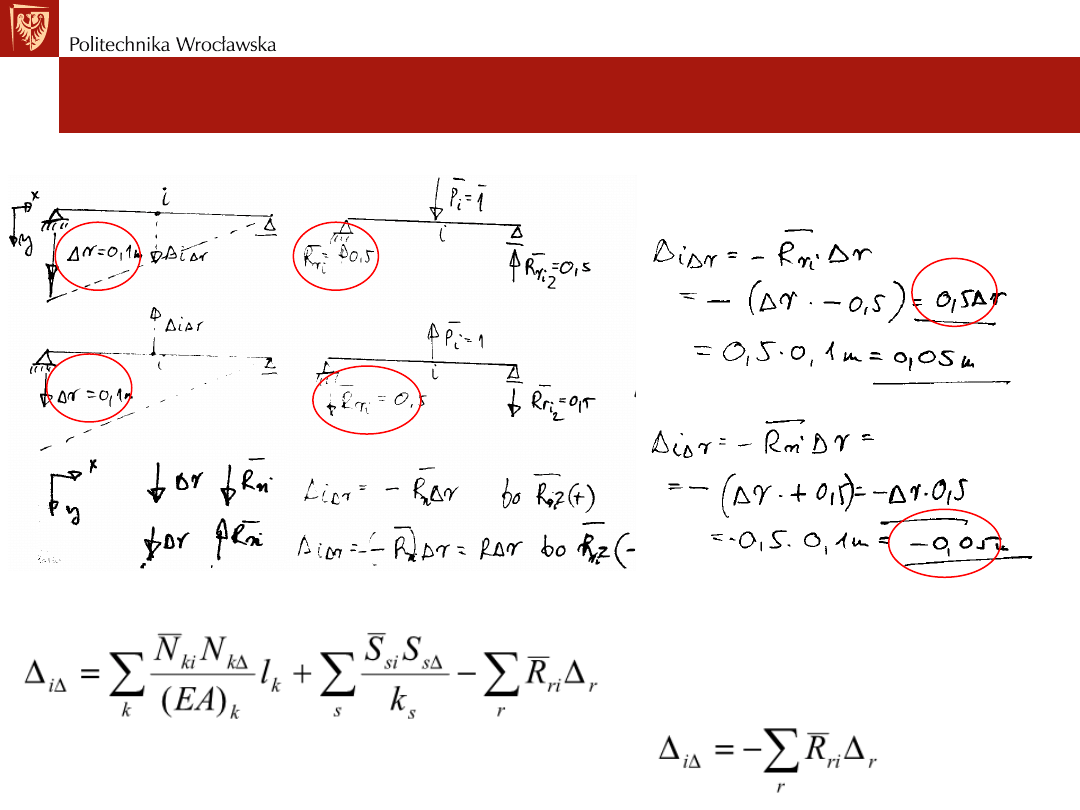
Przykład:
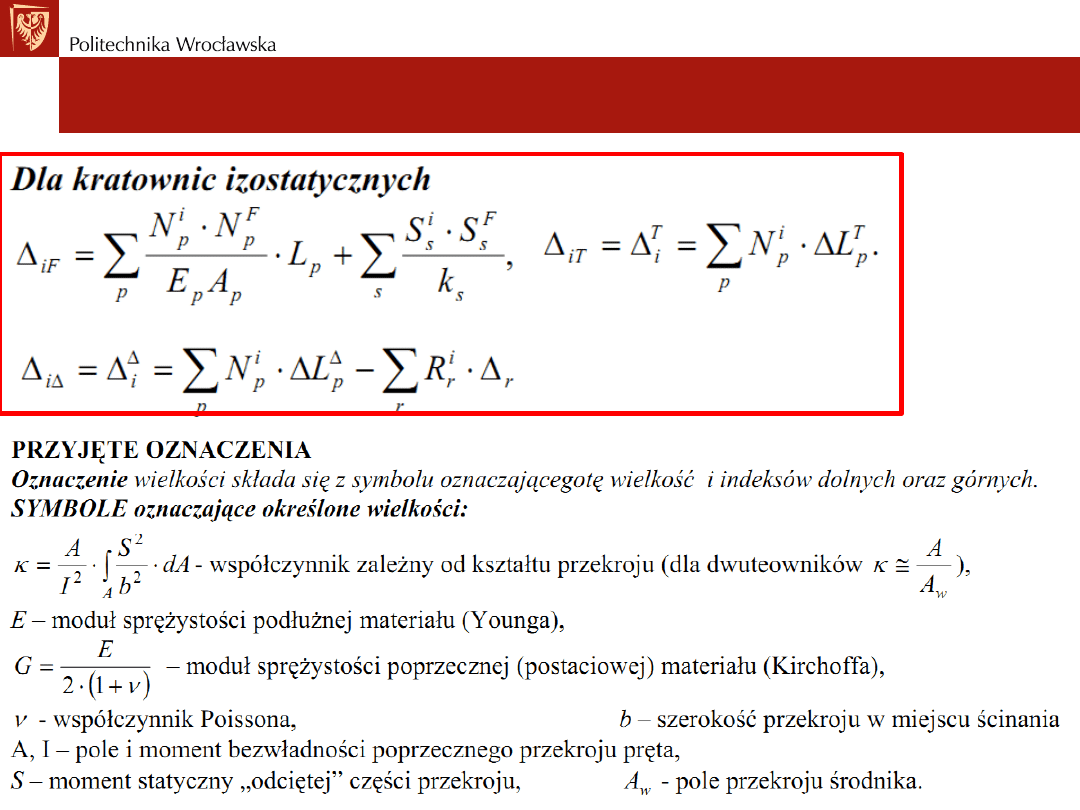
• Dla kratownic obowiązuje wzór przyjmuje
• A dla układów SW obowiązuje wzór
Wyznaczanie przemieszczeń w układach SW
Przemieszczenia wywołane wpływem podpór
Wyznaczanie przemieszczeń w układach SW
Przemieszczenia wywołane wpływem podpór
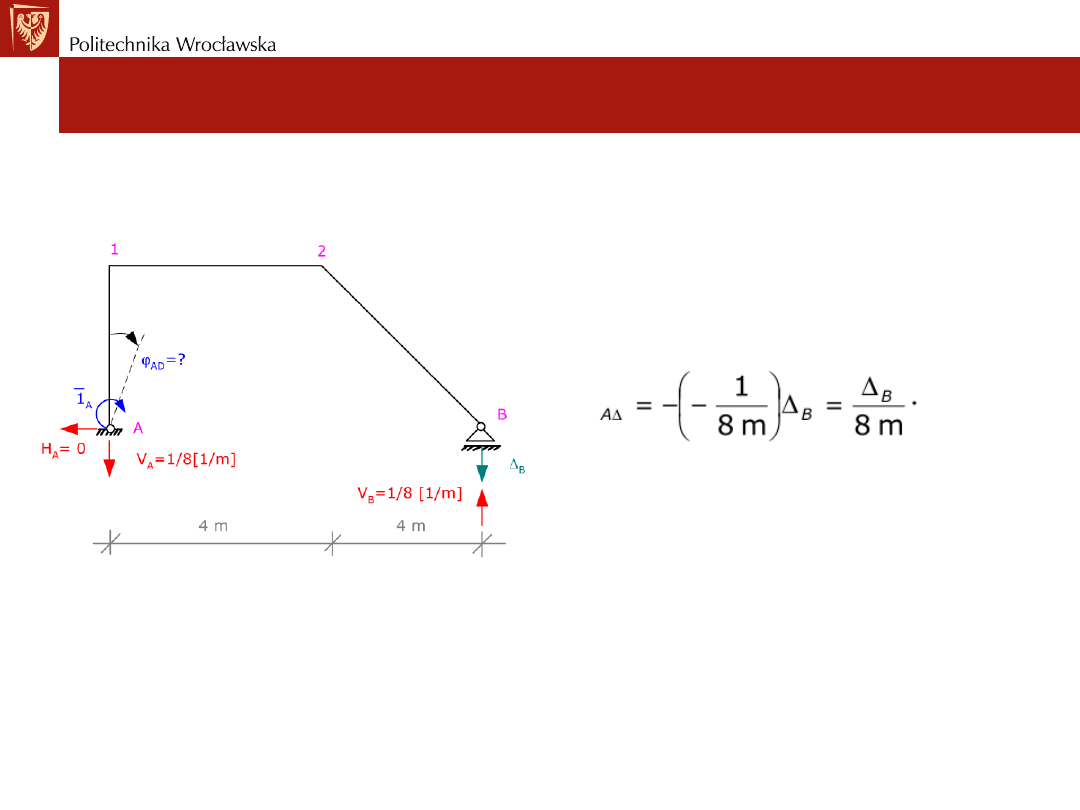
• Przykład nr1:
Wyznaczyć kąt obrotu końca A preta A1 wywołany osiadaniem podpory B o ∆
B.
Wyznaczanie przemieszczeń w układach SW
Przemieszczenia wywołane wpływem podpór
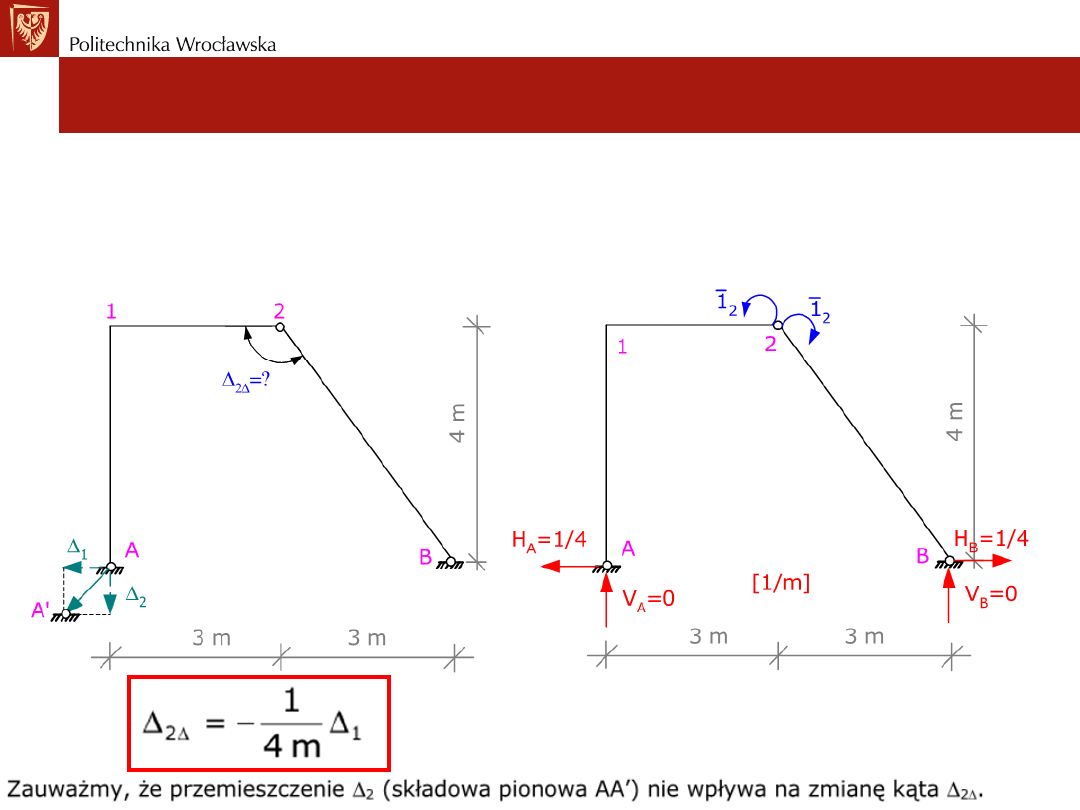
• Przykład nr2:
Wyznaczyć zmianę kąta między końcem 2 pręta 12 i początkiem 2 pręta 2B
wywołane przemieszczeniem węzła A.
Wyznaczanie przemieszczeń w układach SW
Przemieszczenia wywołane temperaturą
• Zmiana temperatury powoduje odkształcenia podużne prętów
oraz w wyniku nierównomiernego rozkładu temperatury po
wysokości przekroju pręta odkształcenia kątowe.
Zmiana temperatury w układach:
• SW nie wywołuje sił przekrojowych -> powoduje
przemieszczenie układu,
• SN wywołuje siły przekrojowe
𝑴
𝒕
,
𝑵
𝒕
, 𝑽
𝒕
oraz siły w więziach
sprężystych
𝑺
𝒔𝒕
i powodują przemieszczenie układu.
Wyznaczanie przemieszczeń w układach SW
Przemieszczenia wywołane temperaturą
• Zmiany temperatury mierzymy przeważnie względem
temperatury montażu konstrukcji.
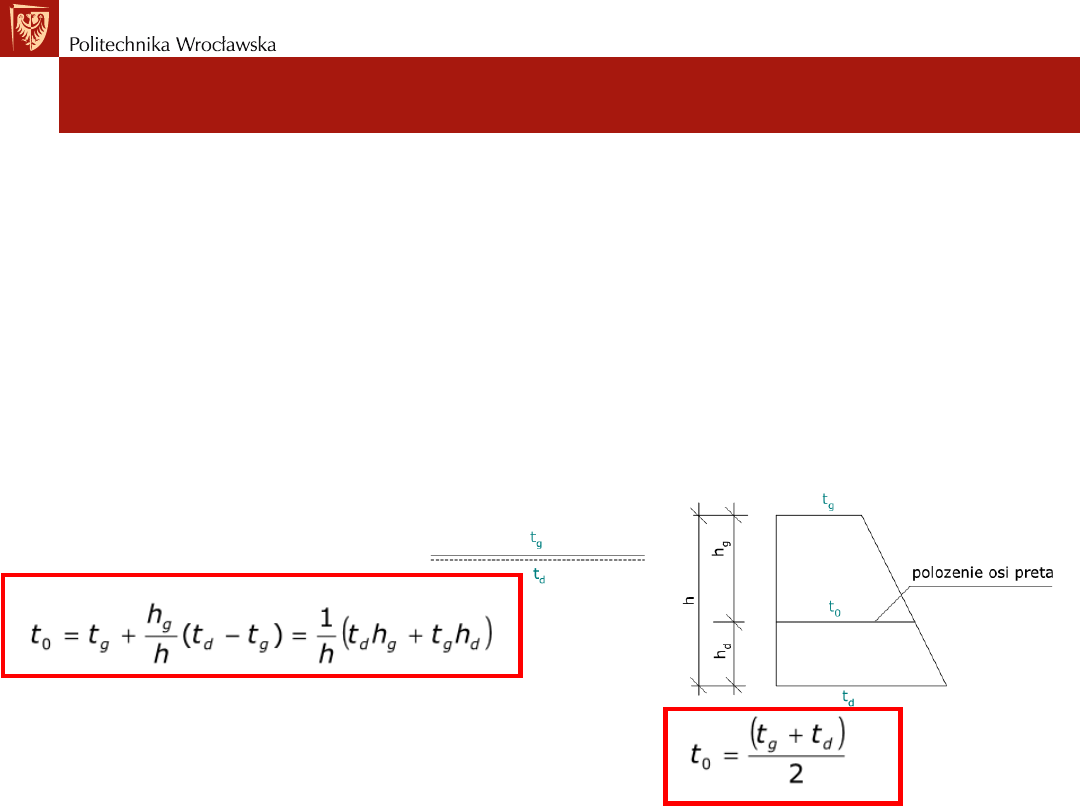
• Przy wyznaczaniu deformacji kątowej zakłada się, że rozkład
przyrostu temperatury po wysokości przekroju pręta jest liniowy. W
każdym pręcie układu zaznaczamy kreskami włókna dolne, jako
uprzywilejowane. Symbolami
𝒕
𝒈
,
𝒕
𝒅
, 𝒕
𝟎
oznaczono przyrost
temperatury w stosunku do temperatury montażu odpowiednio we
włóknach górnych, dolnych oraz w osi pręta.
• W przypadku pręta symetrycznego względem osi
Wyznaczanie przemieszczeń w układach SW
Przemieszczenia wywołane temperaturą
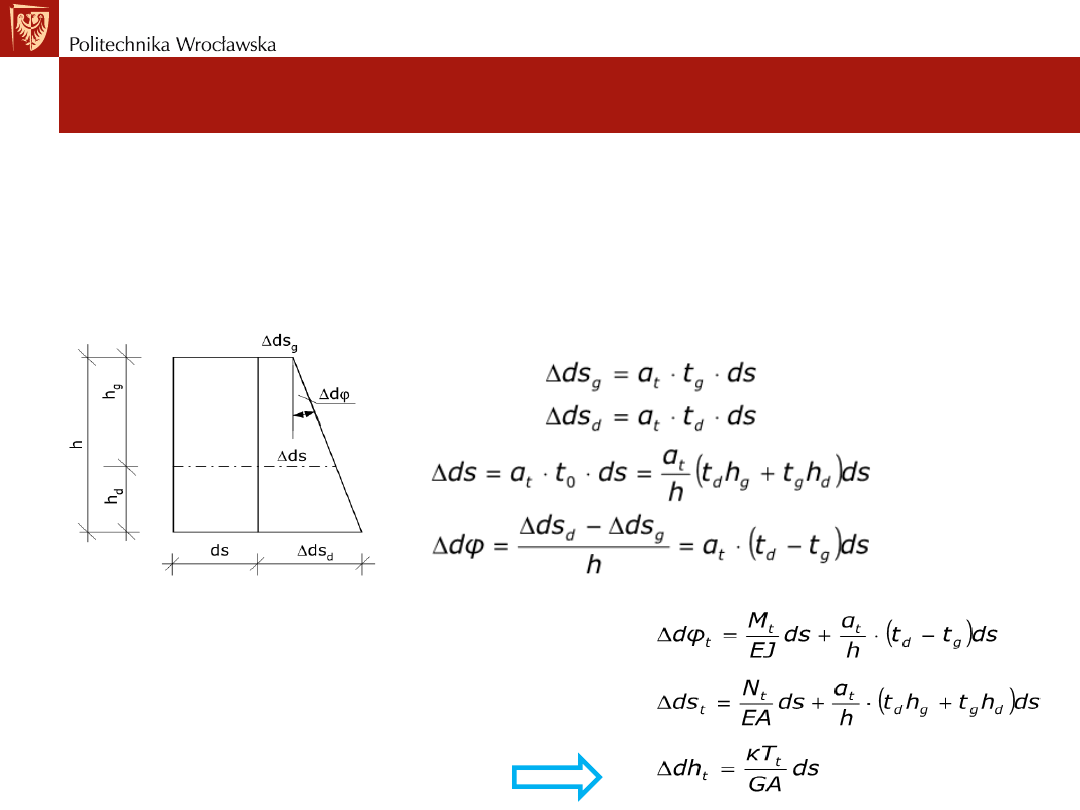
Wyznaczamy odpowiednie odkształcenia wywołane zmianą
temperatury.
• Niech
𝜶
𝒊
oznacza współczynnik rozszerzalności termicznej.
Rozpatrzmy element pręta o długości ds.
• Zmiana temperatury powoduje
w układach SN dodatkowe siły
przekrojowe
𝑀
𝑡
,
𝑁
𝑡
, 𝑉
𝑡
oraz siły
w więziach sprężystych
𝑆
𝑡
.
Odkształcenia pręta wynoszą:
Wyznaczanie przemieszczeń w układach SW
Przemieszczenia wywołane temperaturą
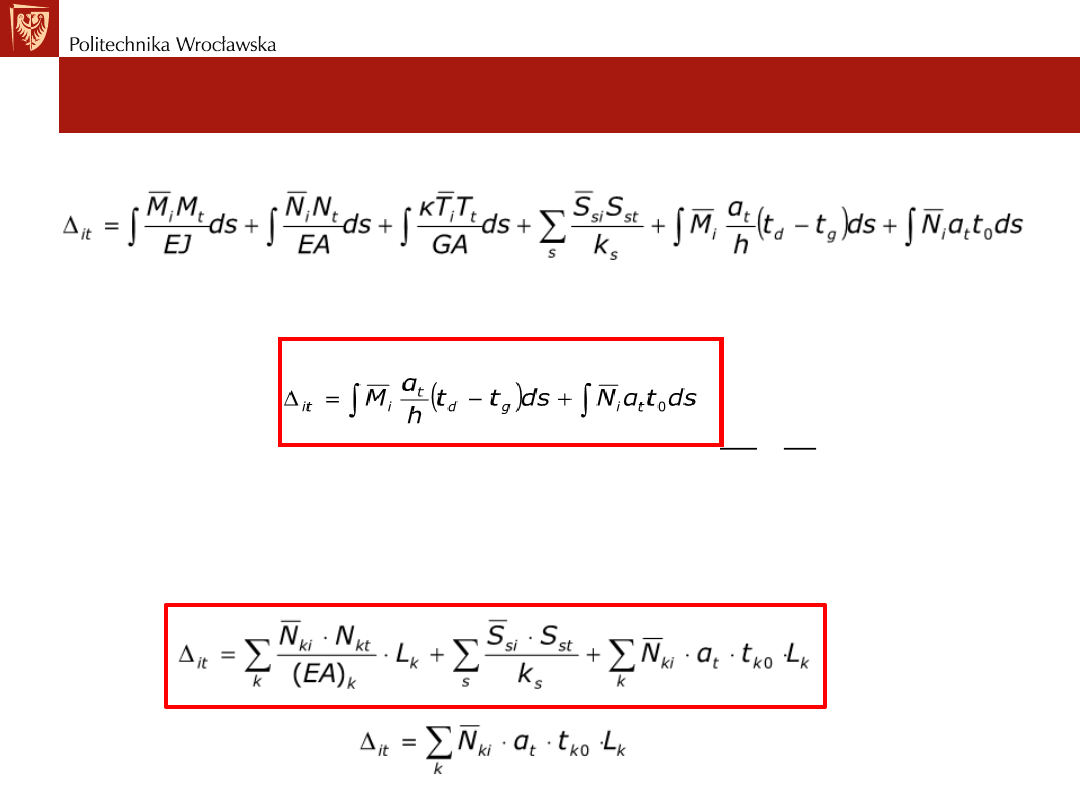
• Wzór na przemieszczenie w miejscu i kierunku “i” ma postać
• Dla układów SW wzór redukuje się do postaci
Całkę w tym przypadku całki traktujemy jako pola
𝑴
𝒊
i
𝑵
𝒊
.
• W przypadku kratownic otrzymujemy wzory:
Wyznaczanie przemieszczeń w układach SW
Przemieszczenia wywołane temperaturą
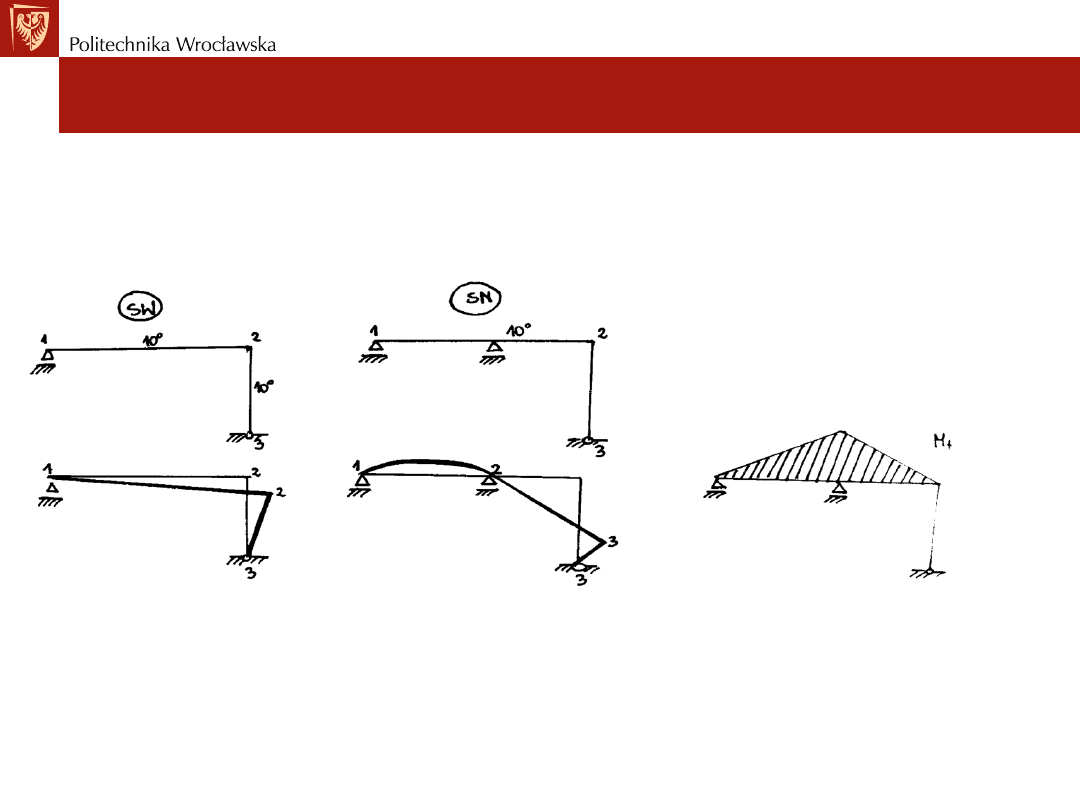
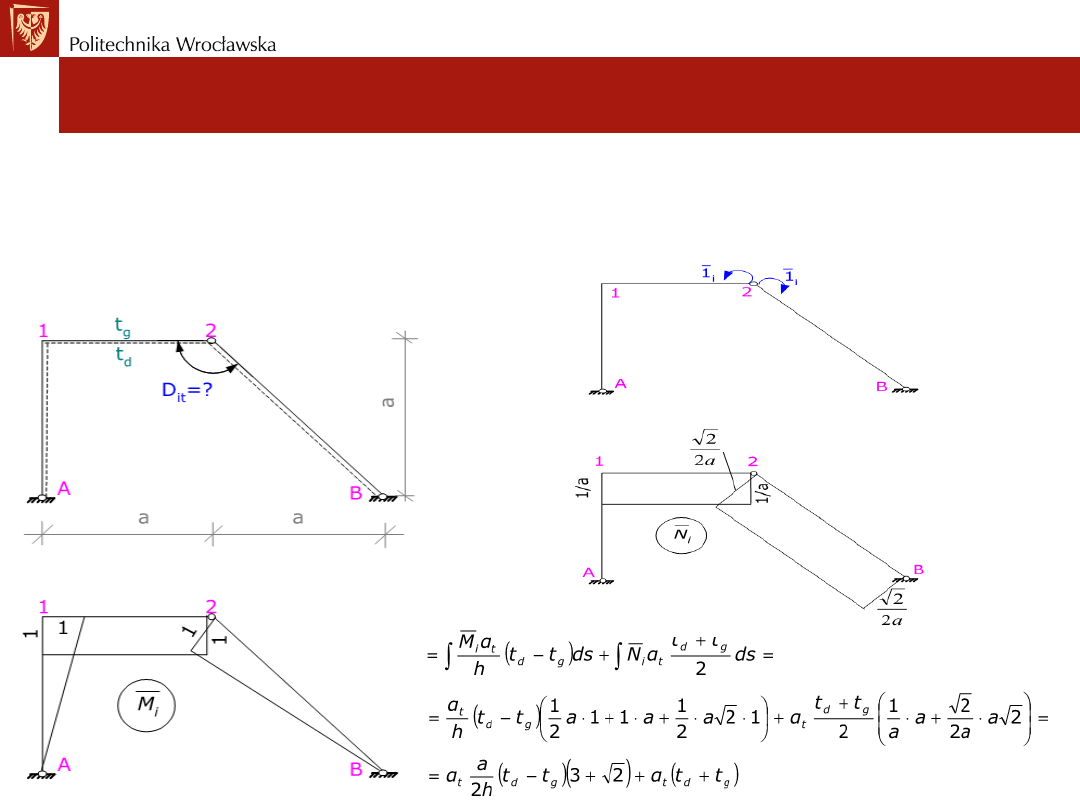
• Przykład nr2:
Wyznaczyć zmianę kąta między przekrojami 21 i 2B
wywołaną zmianą temperatury. Przekrój pręta jest symetryczny, a więc
hg=hd=h/2 dla wszystkich prętów. Zmiana temperatury jest jednakowa dla
wszystkich prętów (tg-td =const).
Wyznaczanie przemieszczeń w układach SW
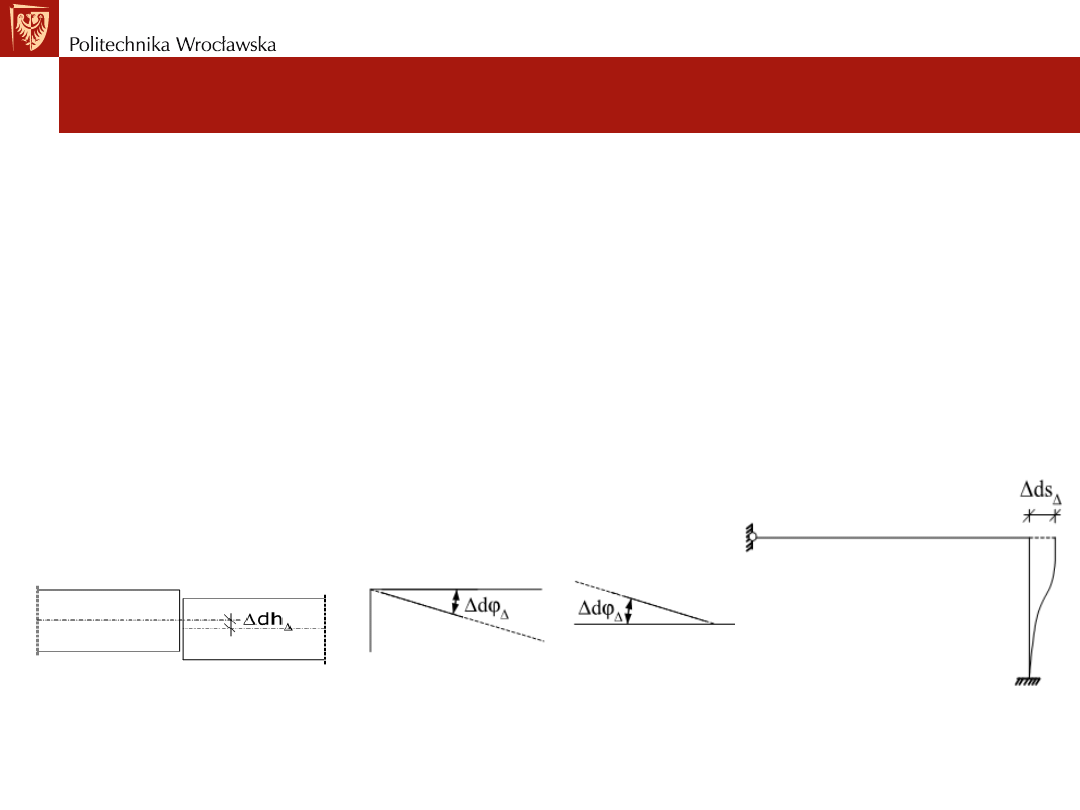
Przemieszczenia wywołane imperfekcjami
Rozpatrujemy imperfekcje geometryczne (niedokładności, błędy
montażu) rzeczywistych konstrukcji.
Rodzaje imperfekcji:
• typu ciągłego np. wygięcie całego pręta,
• typu dyskretnego np. występujące w ustalonych punktach.
Przykładowe i rozpatrywane błędy montażu:
łączenie elementów pod niewłaściwym kątem,
łączenie elementów niewspółosiowo,
montaż elementów zbyt długich lub krótkich.
Imperfekcje geometryczne mogą powodować odkształcenia podużne
i poprzeczne prętów oraz odkształcenia kątowe.
Imperfekcja (błąd montażu) w układach:
• SW nie wywołuje sił przekrojowych -> powoduje przemieszczenie układu,
• SN wywołuje siły przekrojowe
𝑀
∆
,
𝑁
∆
, 𝑉
∆
oraz siły w więziach
sprężystych
𝑆
s∆
i powodują przemieszczenie układu.
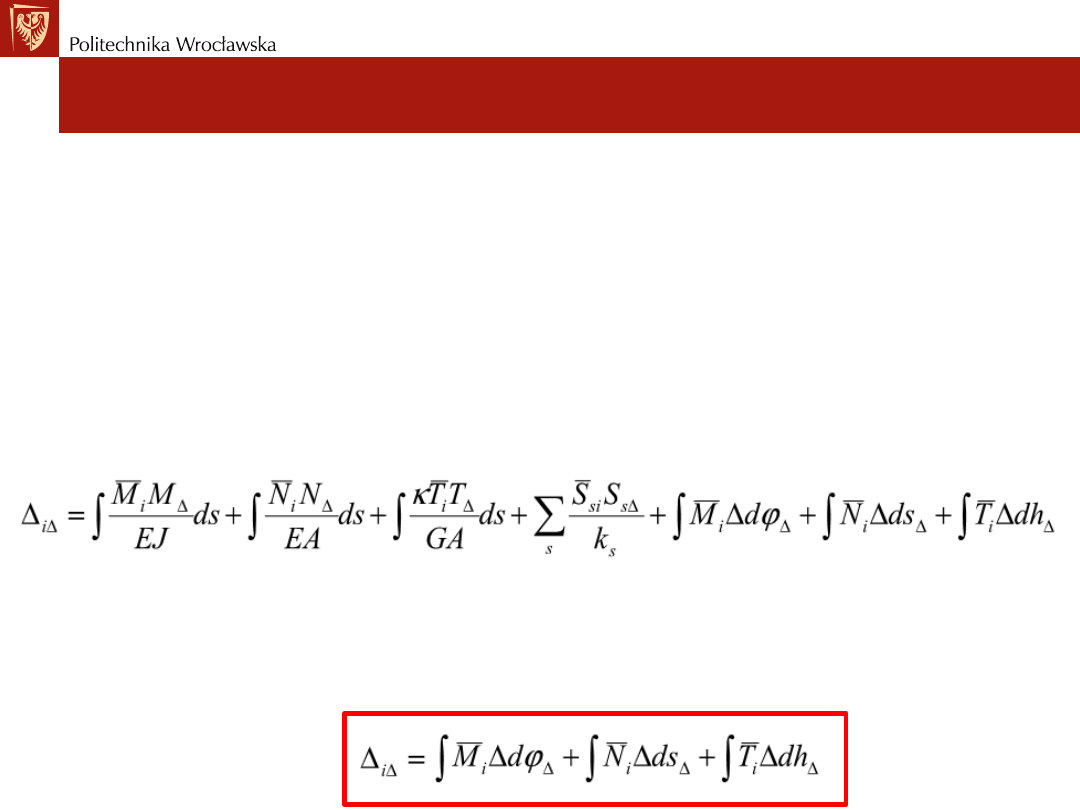
Imperfekcje w układach hiperstatycznych wywołują siły
przekrojowe
𝑀
∆
,
𝑇
∆
,
𝑁
∆
oraz siły
𝑆
∆
w więziach sprężystych. Wzór
na przemieszczenia ma postać:
W układach SW gdy
𝑀
∆
= 0, 𝑇
∆
= 0, 𝑁
∆
= 0 oraz 𝑆
𝑠∆
= 0 wzór na
przemieszczenia ma postać:
Wyznaczanie przemieszczeń w układach SW
Przemieszczenia wywołane imperfekcjami
Wyznaczanie przemieszczeń w układach SW
Przemieszczenia wywołane imperfekcjami
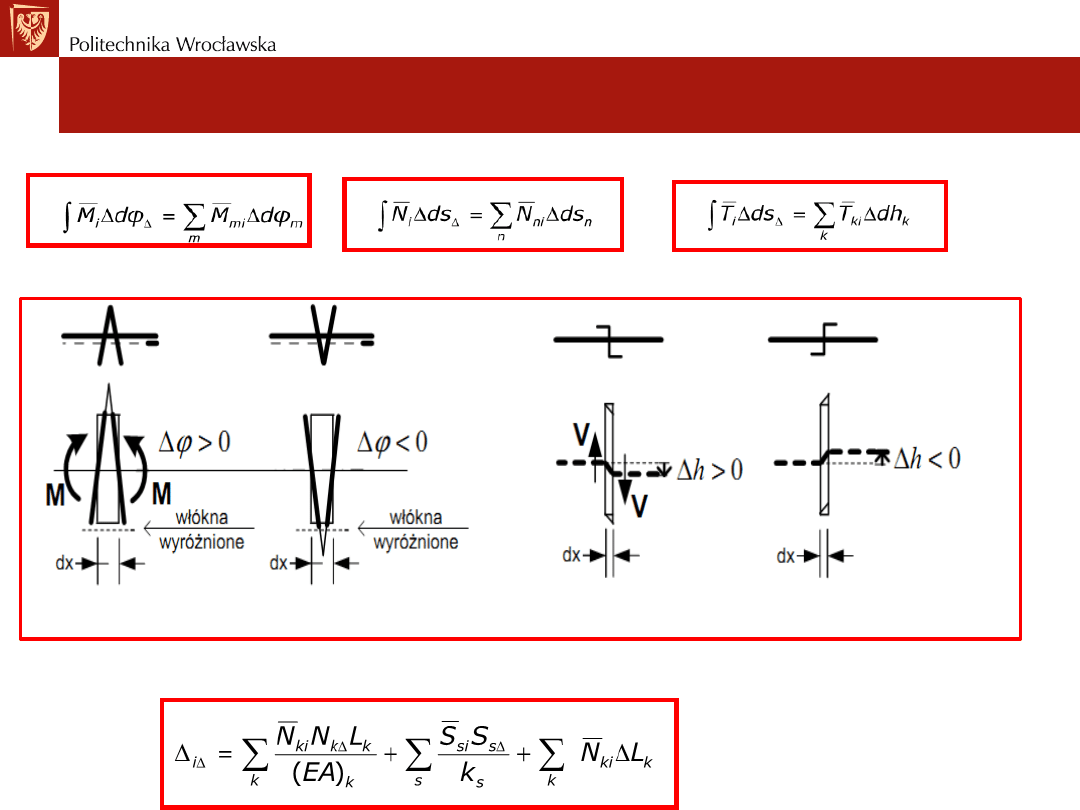
• W układach SW odpowiednie całki przechodzą w sumy:
• Znakowanie błędów montażu
W przypadku kratownic wzór na przemieszczenia ma postać:
Wyznaczanie przemieszczeń w układach SW
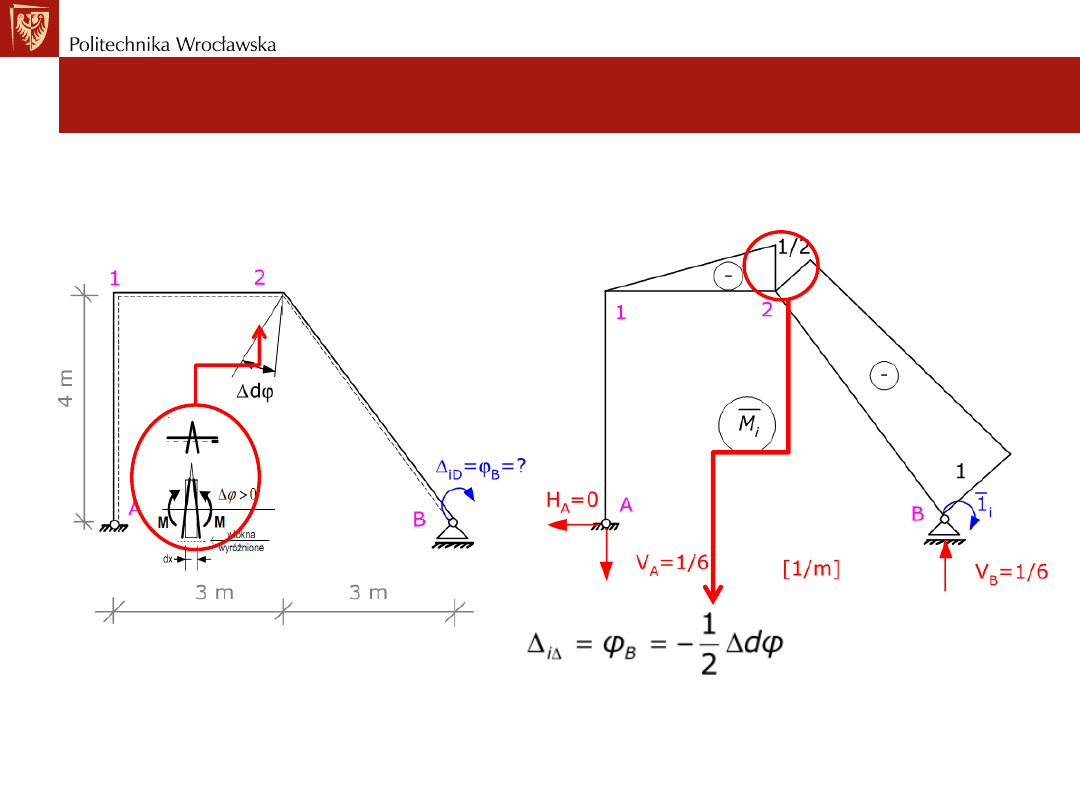
Przemieszczenia wywołane imperfekcjami
• Przykład nr1:
Wyznaczyć obrót przekroju B pręta B2 wywołany imperfekcją kątową w węźle 2.
Znak minus
ponieważ imperfekcja powoduje rozciąganie włókien dolnych
(błąd ze znakiem +), a momenty zginające powodują rozciąganie włókien
górnych (momenty zginające ze znakiem -).
Wyznaczanie przemieszczeń w układach SW
Przemieszczenia wywołane imperfekcjami
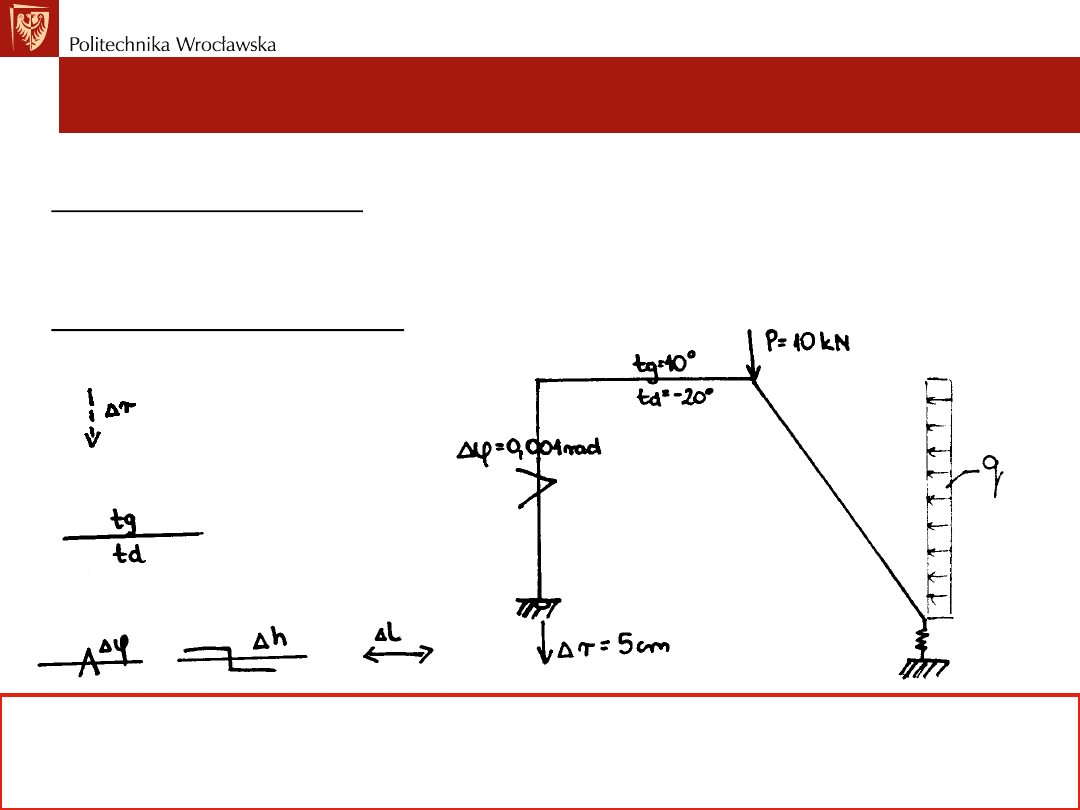
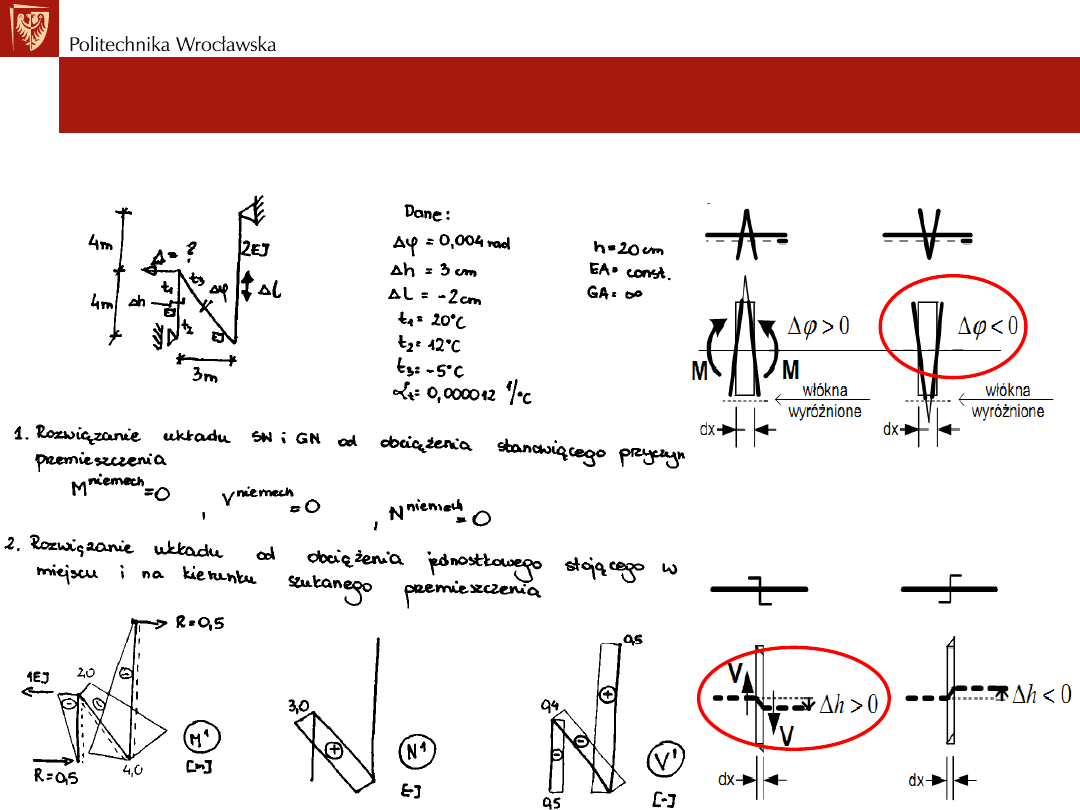
Przykład. Wyznaczyć przemieszczenie wywołane obciążeniem niemechanicznym
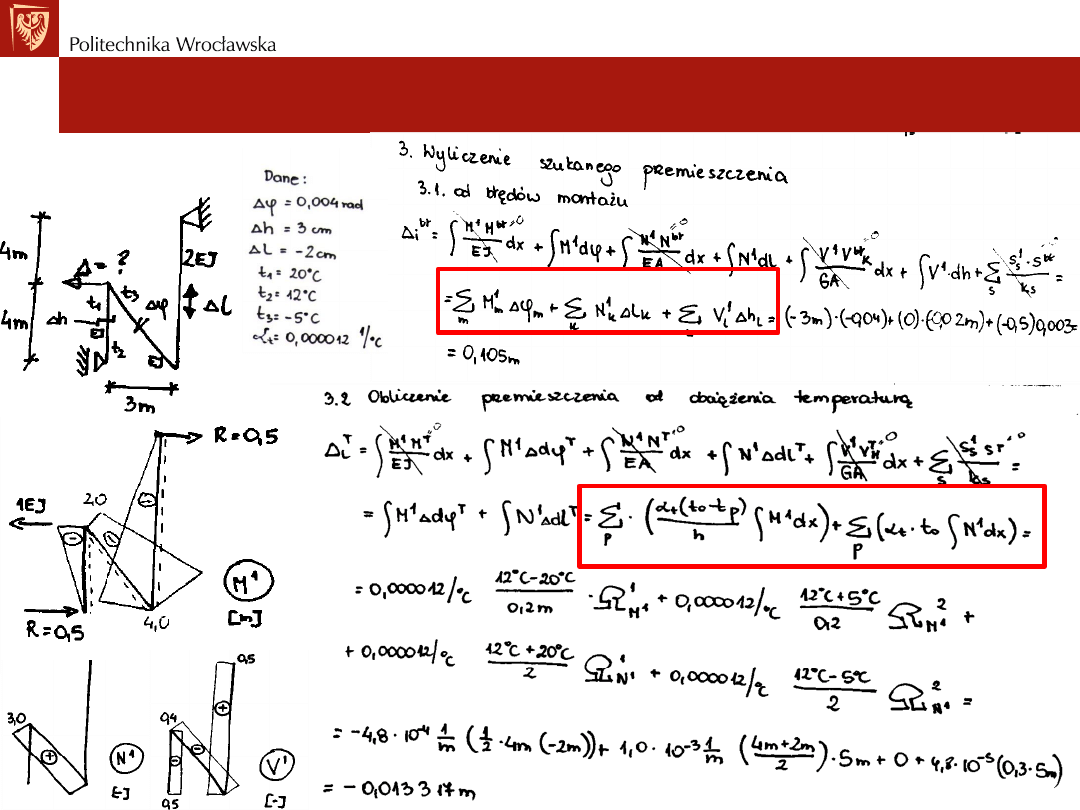
Wyznaczanie przemieszczeń w układach SW
Przemieszczenia wywołane imperfekcjami
Przykład:
Wyznaczanie przemieszczeń w układach SW
Podsumowanie
Wyznaczanie przemieszczeń w układach SW
Podsumowanie
Wyznaczanie przemieszczeń w układach SW
Podsumowanie
Wyszukiwarka
Podobne podstrony:
MB W03 PWr v2
MB W01 PWr
MB W04 PWr
MB W01 PWr
MB W00 PWr
MB W02 PWr
MB W02 PWr
MB W06 PWr
MB W04 PWr v2
MB W01 PWr
MB 7 2014
RBD W03
W03 Orbitale wodoru
więcej podobnych podstron