MECHANIKA BUDOWLI
Wykład 4:
USTROJE STATYCZNIE NIEWYZNACZALNE.
METODA SIŁ.
Prowadzący: dr inż. Wojciech Zielichowski-Haber
Ustroje statycznie niewyznaczalne. Metoda sił
Plan wykładu
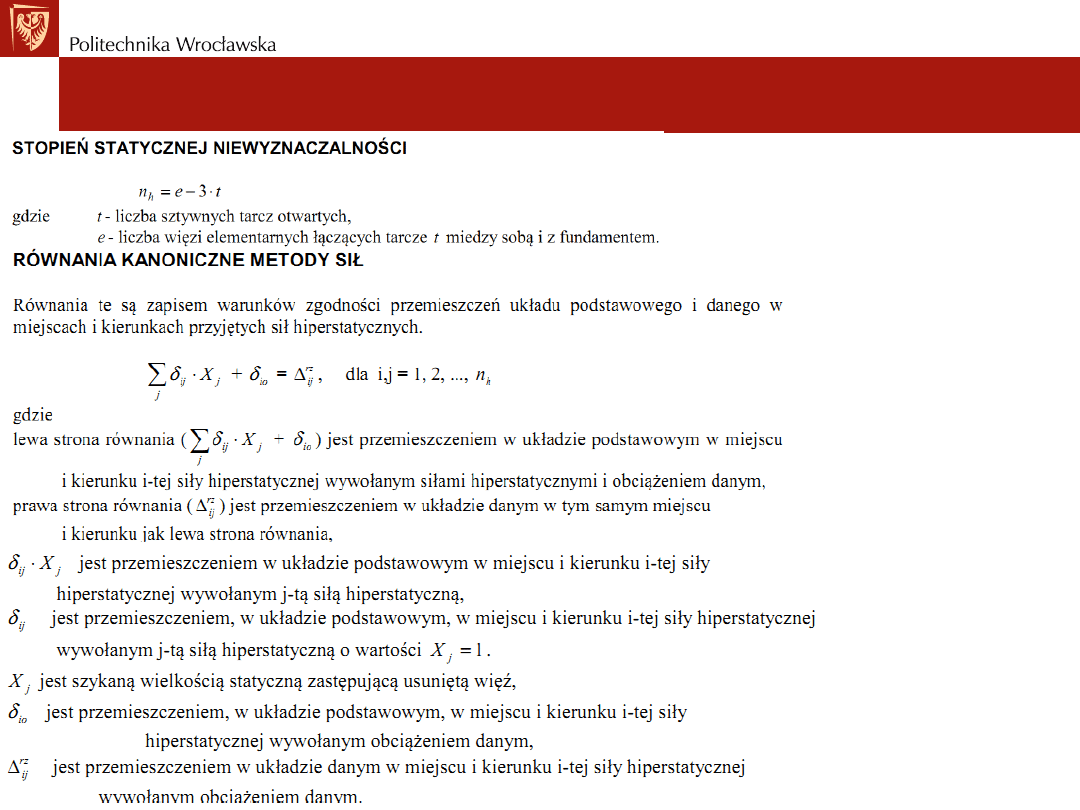
1. Stopień statycznej niewyznaczalności
2. Sformułowanie metody sił dla belek i ram
3. Układ podstawowy i układ równań kanonicznych dla ustrojów
poddanym obciążeniom mechanicznym
4. Kontrola poprawności rozwiązania
5. Sformułowanie metody sił dla kratownic
6. Belki statycznie niewyznaczalne
7. Wyznaczanie przemieszczeń w układach statycznie
niewyznaczalnych od obciążeń mechanicznych
8. Układ podstawowy i układ równań kanonicznych dla ustrojów
poddanym obciążeniom nie mechanicznym
9. Wyznaczanie przemieszczeń w układach statycznie
niewyznaczalnych od obciążeń niemechanicznych
10. Przykłady
11. Podsumowanie
Ustroje statycznie niewyznaczalne. Metoda sił
Stopień statycznej niewyznaczalności
Właściwości płaskich układów prętowych:
• każdy płaski ustrój prętowy można podzielić na:
oddzielne tarcze i łączące je więzi,
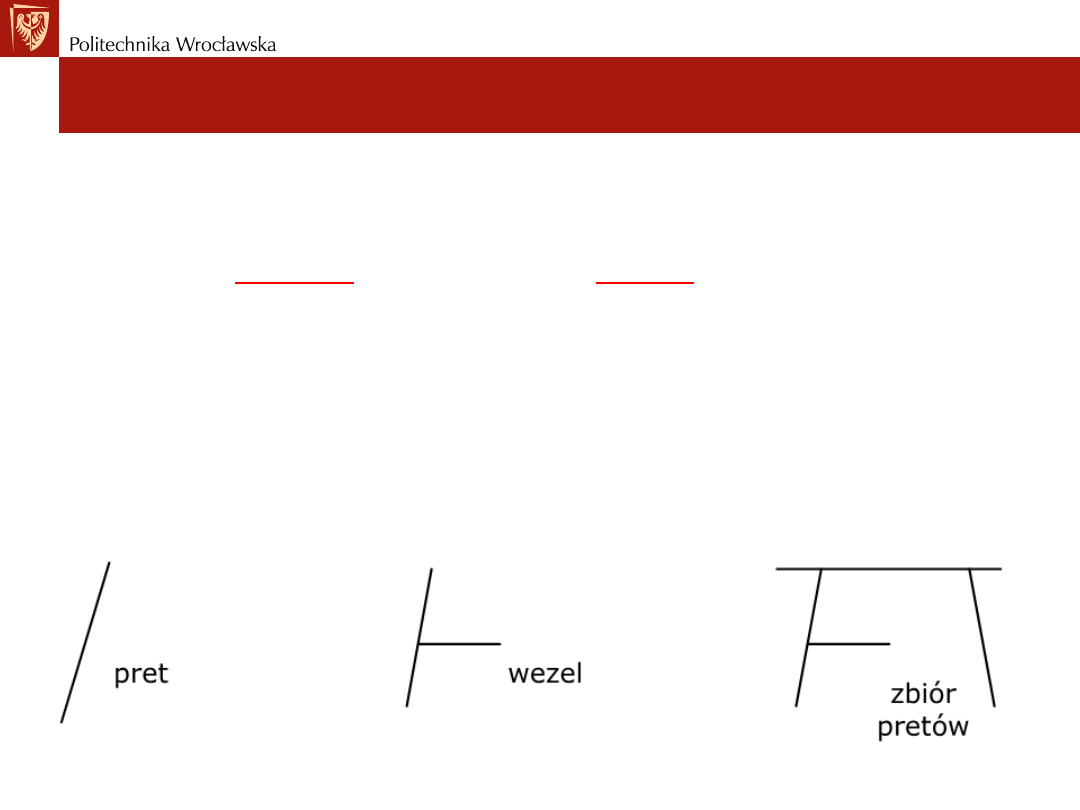
• za tarczę będziemy uważać:
a) wydzielony pręt
b) wydzielony węzeł
c) zbiór prętów połączonych węzłami sztywnymi tworzących formę
otwartą
Ustroje statycznie niewyznaczalne. Metoda sił
Stopień statycznej niewyznaczalności
Stopień statycznej niewyznaczalności dla zbioru prętów
tworzących
formę otwartą
można wyznaczyć bezpośrednio,
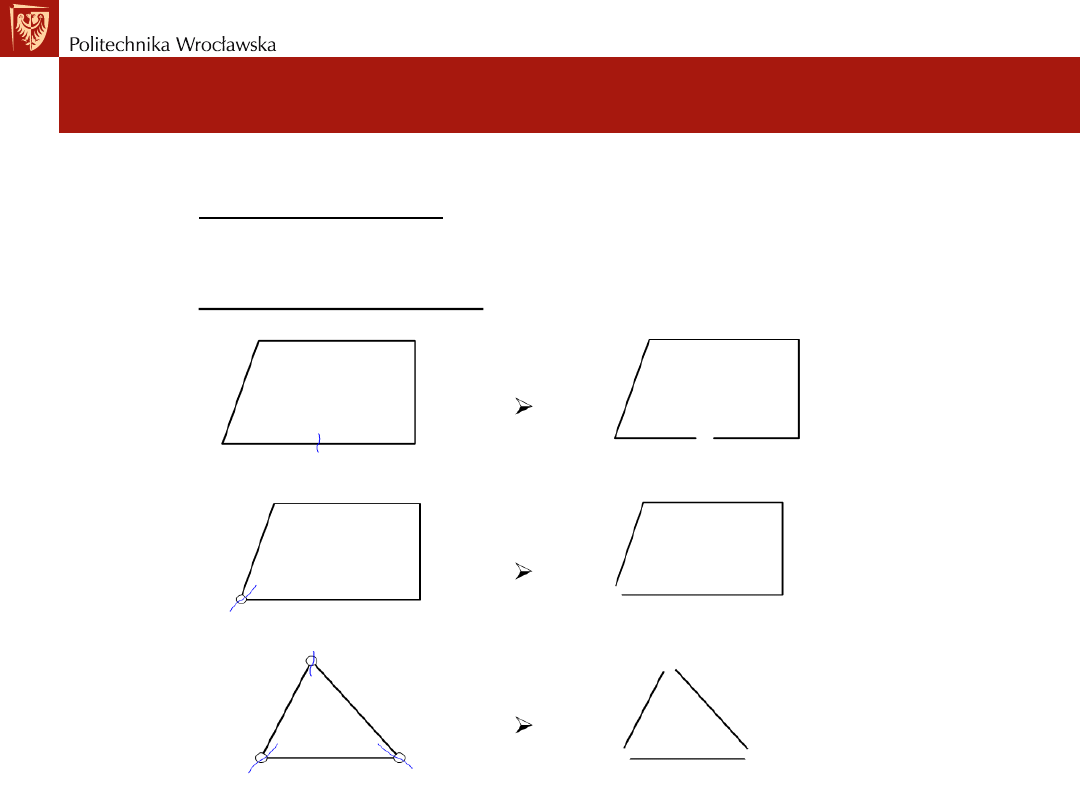
Stopień statycznej niewyznaczalności dla zbioru prętów
tworzących
formę zamkniętą
określamy poprzez rozcięcie go jak
poniżej:
Ustroje statycznie niewyznaczalne. Metoda sił
Stopień statycznej niewyznaczalności
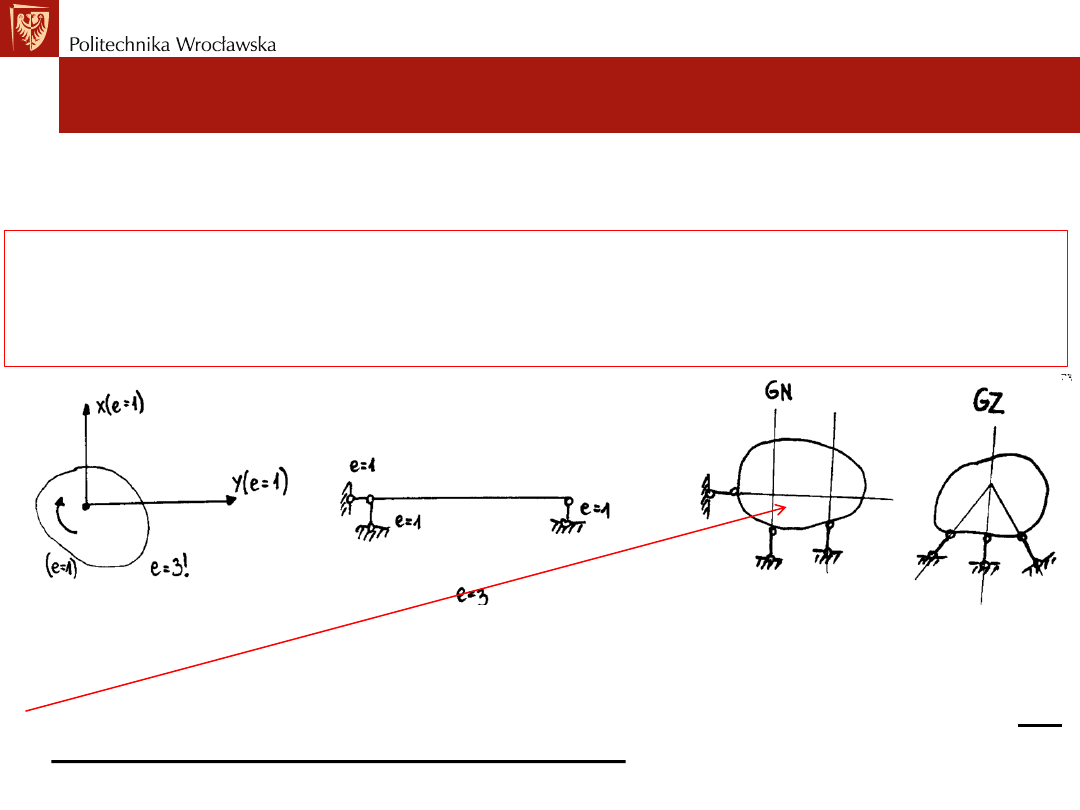
• Każda swobodna!!! tarcza sztywna ma trzy
(3!!!) stopnie
swobody
na płaszczyźnie.
Liczbą stopni swobody SS danego układu nazywamy liczbę
niezależnych parametrów niezbędnych do jednoznacznego
określenia możliwości jego ruchu w przestrzeni.
• Aby układ był geometrycznie niezmienny
GN
(nie jest mechanizmem,
nie ma możliwości ruchu swobodnego), musi zostać unieruchomiony.
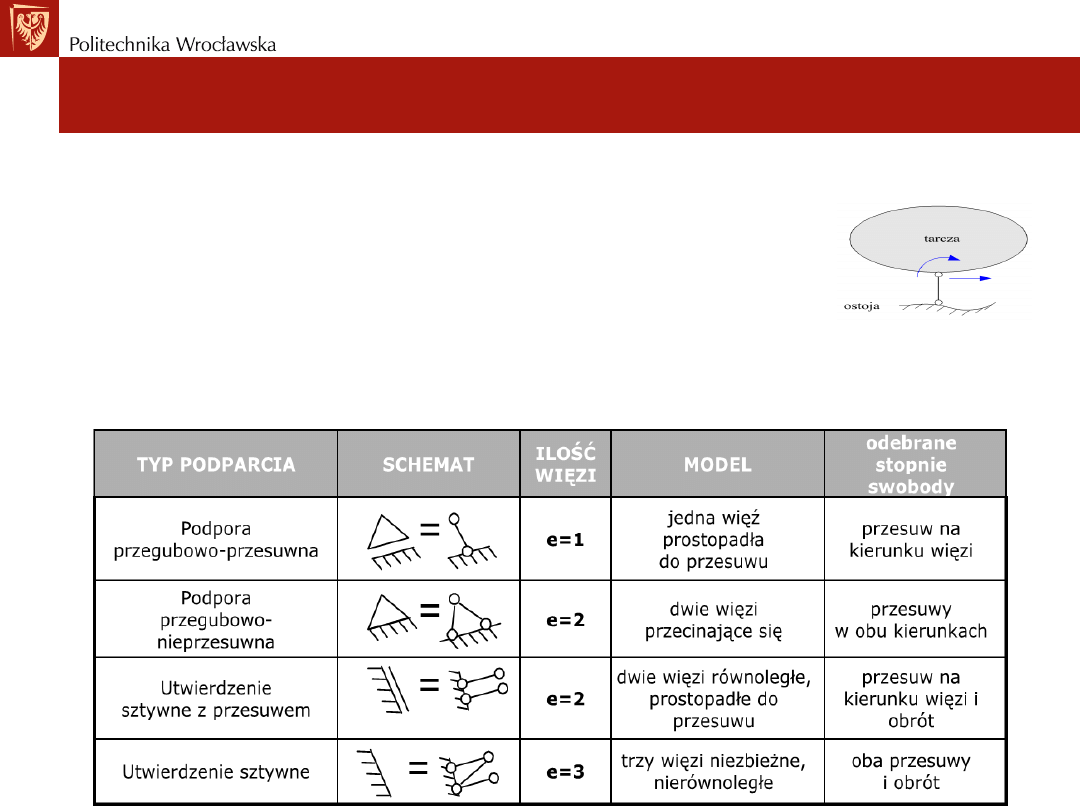
• Aby tarczę unieruchomić należy przyłożyć trzy (3) więzi elementarne nie
przecinające się w jednym punkcie na paszczyźnie, łączące daną
tarcze z częścią nieruchomą konstrukcji (fundament).
Ustroje statycznie niewyznaczalne. Metoda sił
Stopień statycznej niewyznaczalności
• Więź elementarną
stanowi nieściśliwy pręt przegubowo-przegubowy.
Odbiera ona tarczy
t jeden (1) stopień swobody
.
• Litera
e oznacza liczbę więzi elementarnych,
• Podstawowe podpory i odpowiadające im liczby więzi elementarnych
(łączące z fundamentem).
Ustroje statycznie niewyznaczalne. Metoda sił
Stopień statycznej niewyznaczalności
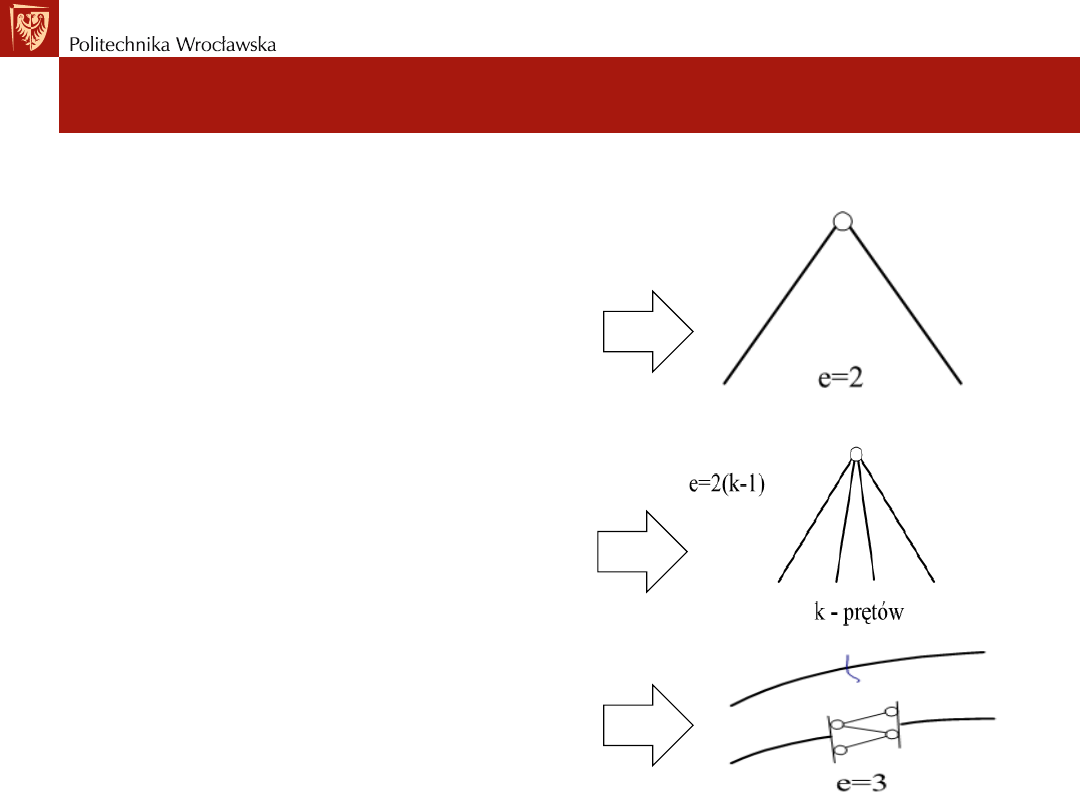
• Dwa pręty połączone przegubem -
unieruchomiony jeden z nich, drugi
traci dwa (2) stopnie swobody ->
Możliwy jest tylko jego obrót względem
unieruchomionego przegubu -> e=2,
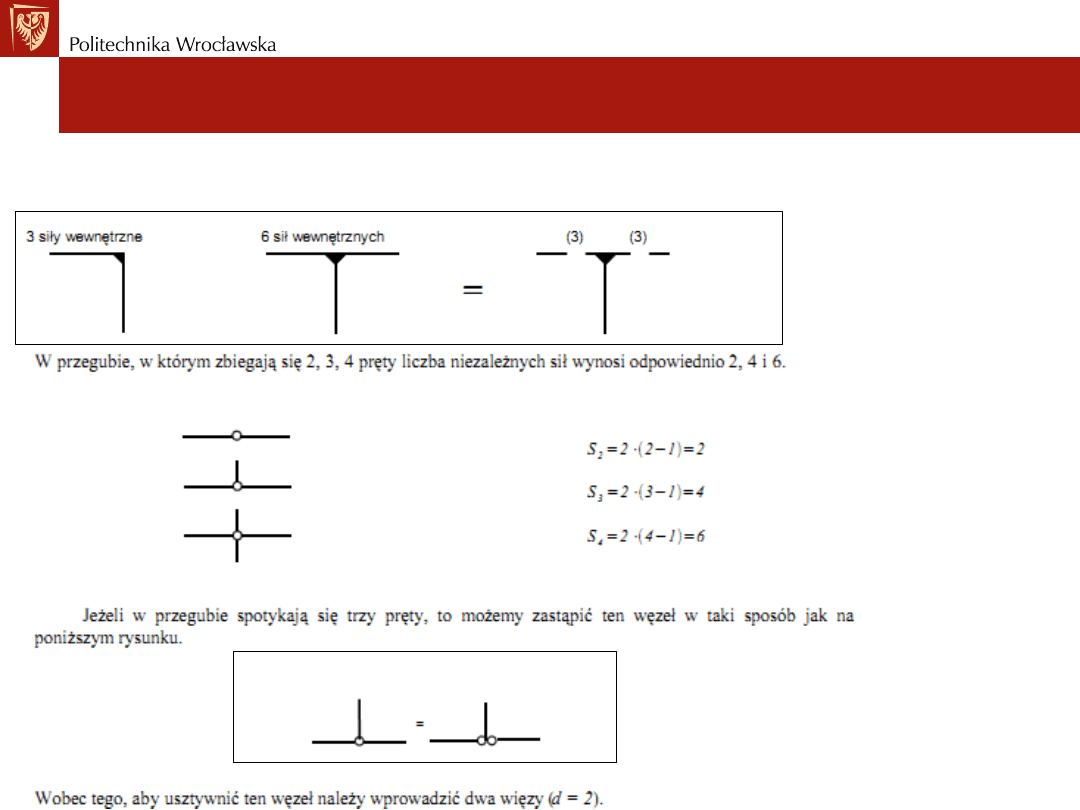
• W przegubie połączonych jest k prętów –
unieruchomiony jednego z nich, każdy
pozostały traci dwa (2) stopnie
swobody -> e=2(k-1).
• Połączenie szytywne odbiera każdemu
połączeniu 3 stopnie swobody -> e=3
Ustroje statycznie niewyznaczalne. Metoda sił
Stopień statycznej niewyznaczalności
• W przypadku prętów sztywno zamocowanych liczbę sił niezależnych można
określić -> e=3(k-1)
Ustroje statycznie niewyznaczalne. Metoda sił
Stopień statycznej niewyznaczalności
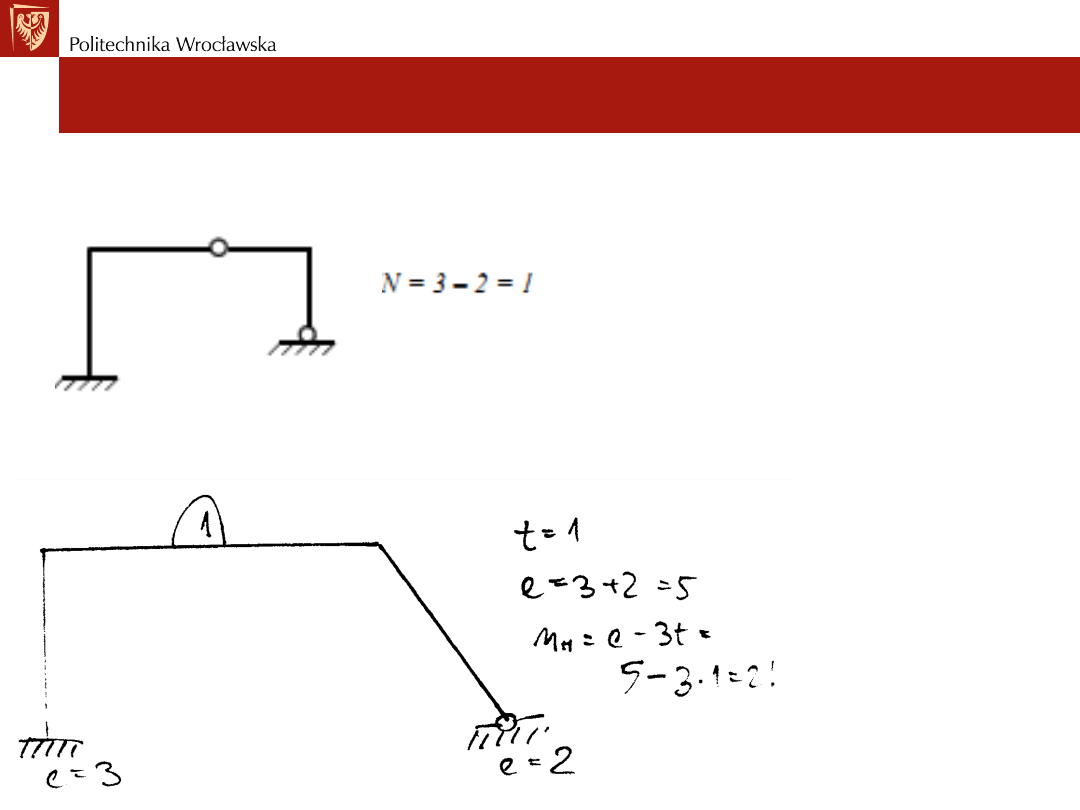
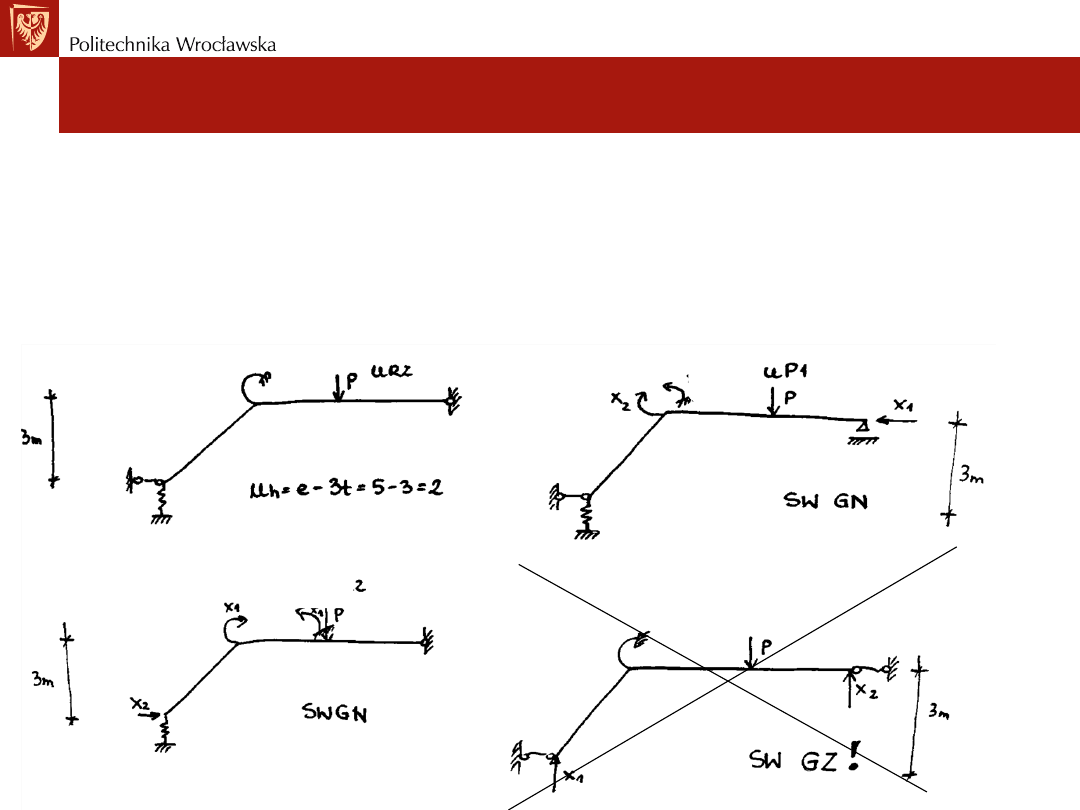
• Warunek konieczny, aby ustrój był
statycznie wyznaczalny (SW)
(czyli
można go rozwiązać korzystając tylko z warunków równowagi) jest
spełnienie równości mającej charakter ilościowy:
e=3t
lub
e-3t=0
• Warunek ten jest konieczny, ale nie wystarczający. Dodatkowym
wymaganiem jest, aby ustrój był
geometrycznie niezmienny (GN).
SW, GN
SW, GN
SW, GZ
– układ jest mechanizmem!!!
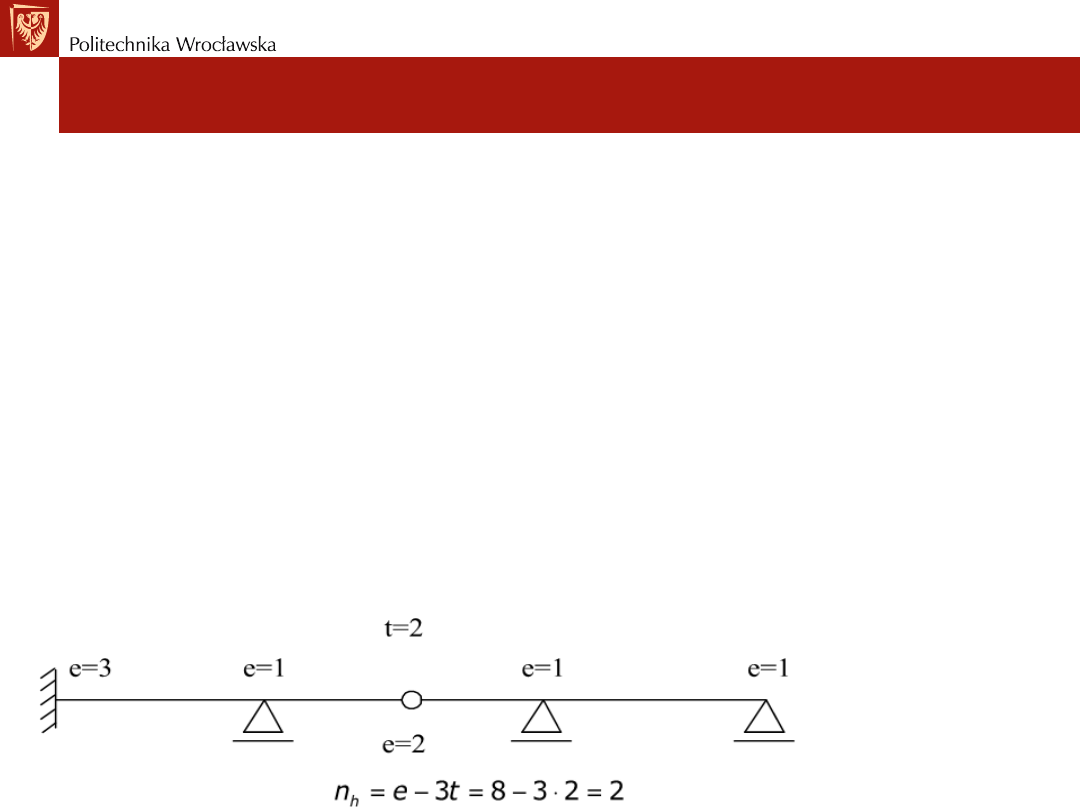
Ustroje statycznie niewyznaczalne. Metoda sił
Stopień statycznej niewyznaczalności
Liczbę
więzi nadliczbowych nh
równą liczbie brakujących równań
równowagi, które należało by odrzucić aby układ był statycznie
wyznaczalny (SW) nazywamy stopniem statycznej niewyznaczalności
(SSN):
n
h
=e-3t>0
SW
SN
Dla każdej tarczy t można ułożyć trzy równania równowagi (3t
niezależnych równań). Wielkościami nieznanymi są siły w więziach
elementarnych, a liczba niewiadomych sił wynosi e. W każdym węźle
występuje e nieznanych sił.
Ustroje statycznie niewyznaczalne. Metoda sił
Stopień statycznej niewyznaczalności
Ustrój
statycznie niewyznaczalny (SN) lub hiperstatyczny o SSN nh to
ustrój
, który jest przesztywniony -> posiada więcej więzi e niż jest
potrzebne, aby układ był statycznie wyznaczalny (SW).
Do rozwiązywania układów hiperstatycznych trzeba zbudować
dodatkowe
nh równań
, wynikających z warunku ciągłości konstrukcji (ograniczenia
przemieszczeń konstrukcji).
SSN nh > 0 oznacza
, że układ ma więcej niewiadomych wielkości e niż
równań równowagi i układu nie da się rozwiązać przy zastosowaniu tylko
równań równowagi.
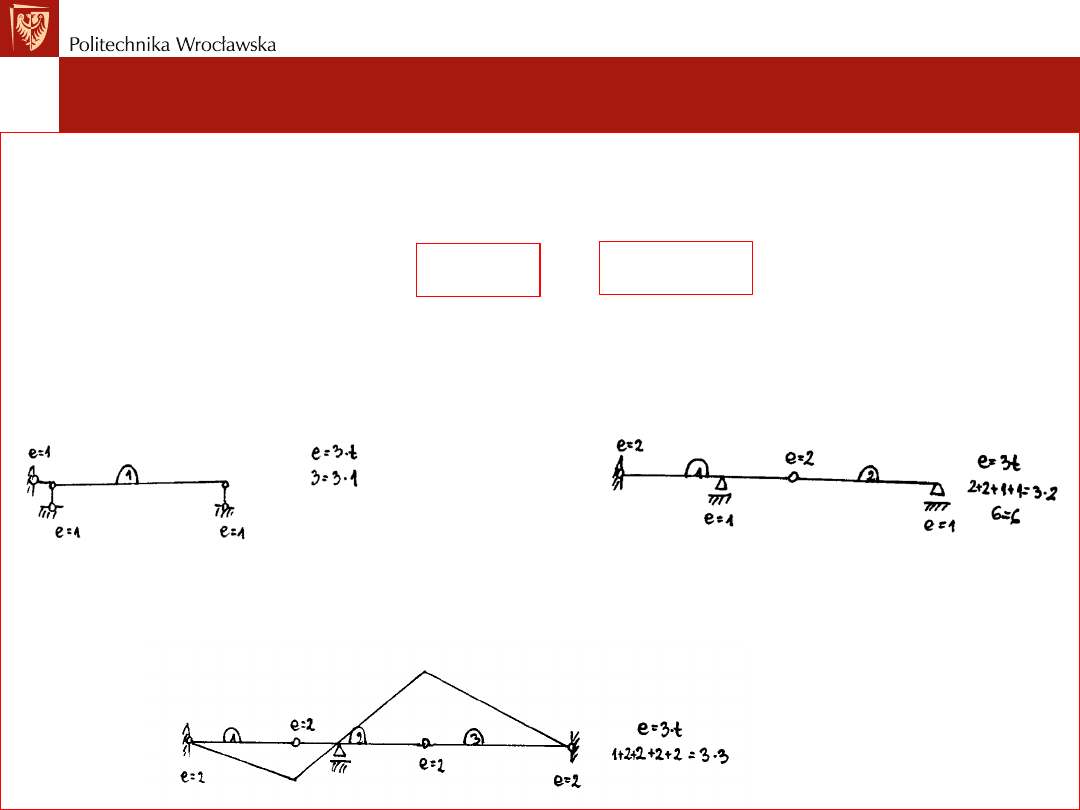
Przykład nr1: Określić SSN - nh dla belki
Ustroje statycznie niewyznaczalne. Metoda sił
Stopień statycznej niewyznaczalności
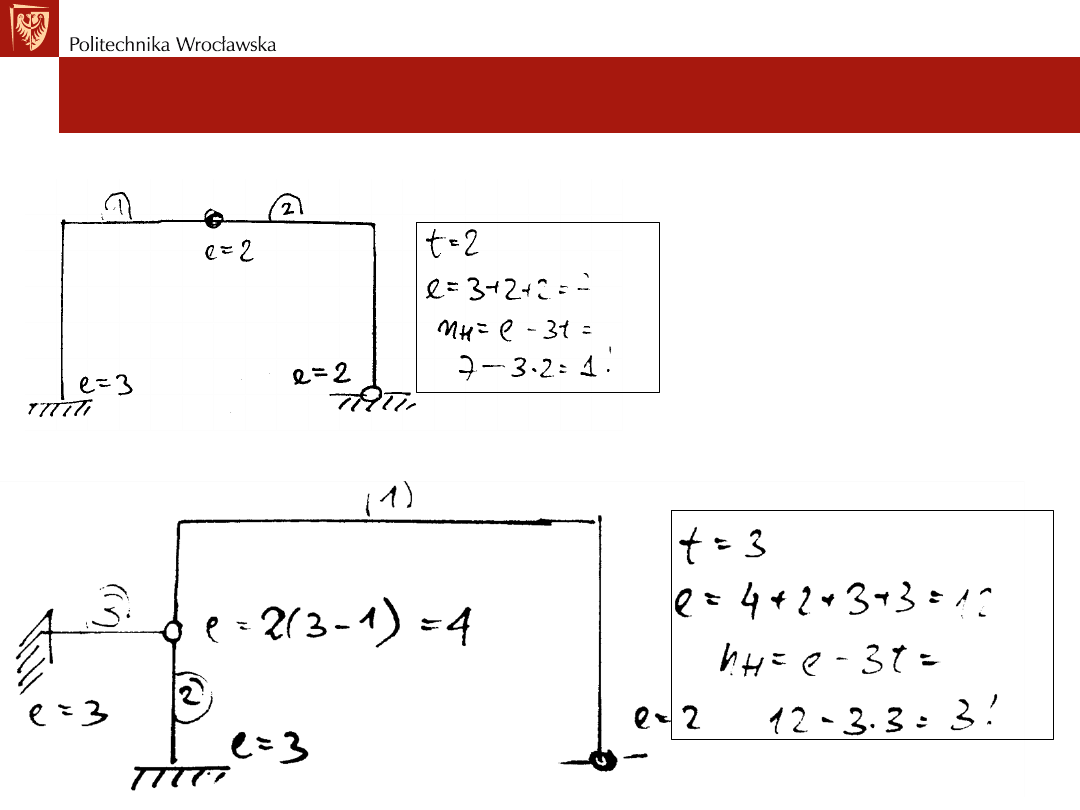
Przykład nr2: Określić SSN - nh dla ramy
Przykład nr3: Określić SSN - nh dla ramy
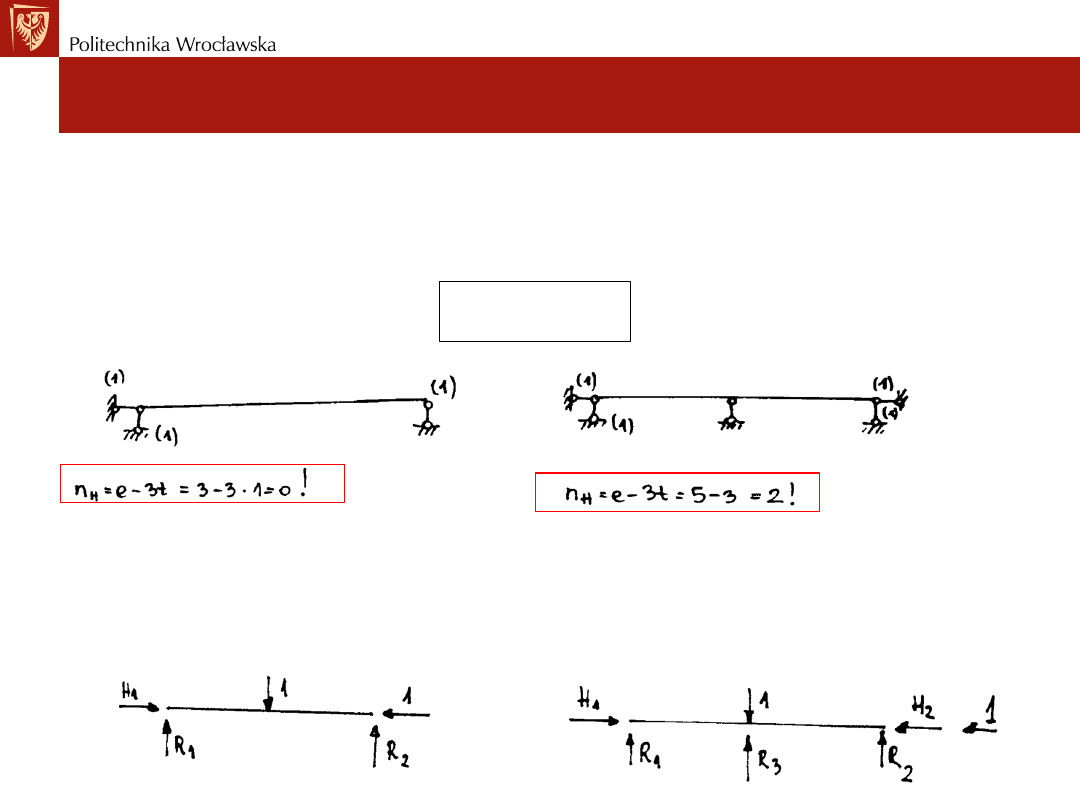
Ustroje statycznie niewyznaczalne. Metoda sił
Stopień statycznej niewyznaczalności
Przykład nr4: Określić SSN - nh dla ramy
Przykład nr5: Określić SSN - nh dla ramy
Ustroje statycznie niewyznaczalne. Metoda sił
Stopień statycznej niewyznaczalności
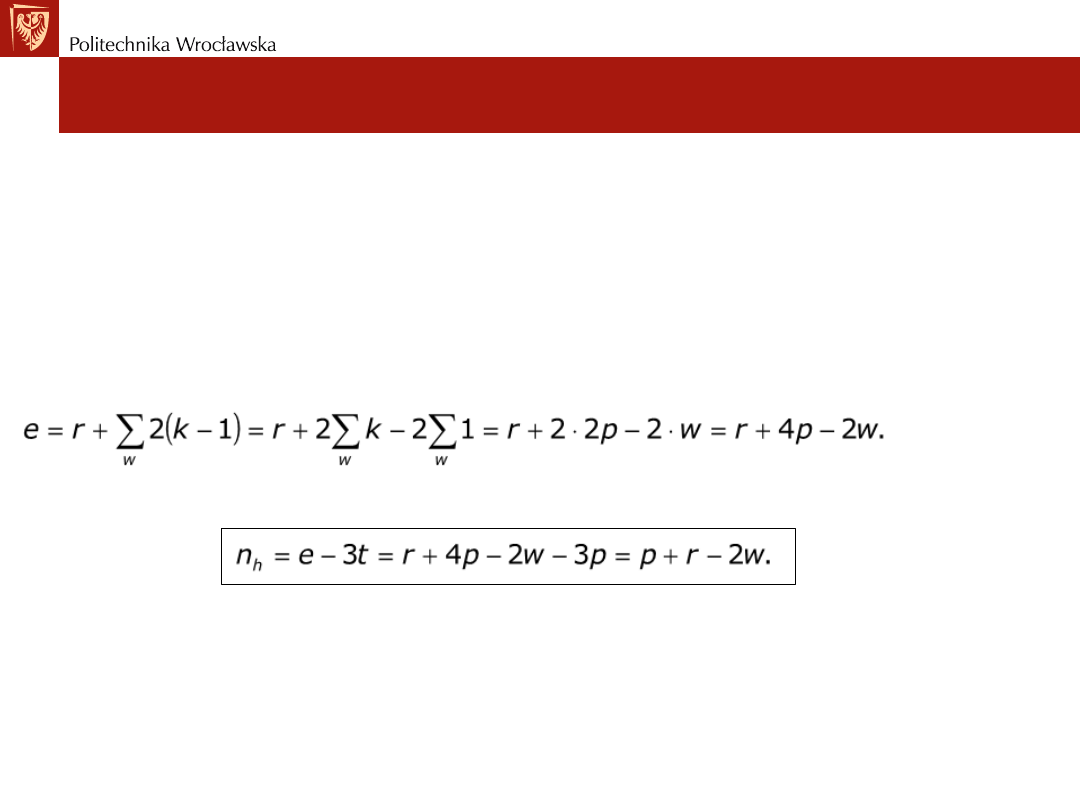
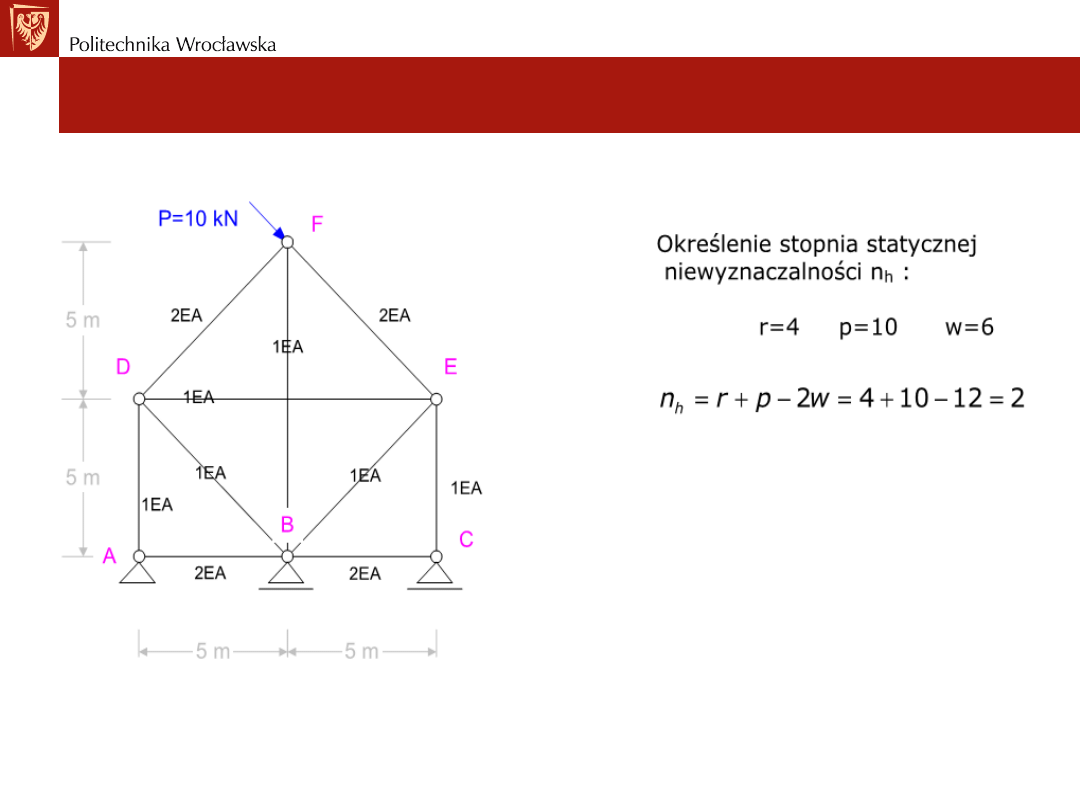
SSN kratownicy płaskiej zależy od liczby węzłów, liczby prętów i liczby
więzi podporowych.
Stosujemy następujące oznaczenia:
p – liczba prętów kratownicy,
w- liczba węzłów,
r - liczba więzi elementarnych.
Stopień statycznej niewyznaczalności (SSN) kratownic wynosi:
Suma p+r określa liczbę wielkości niewiadomych, gdyż nieznane są siły w
prętach i reakcje podporowe.
Ponieważ w każdym węźle mamy zbieżny układ sił stąd dla każdego węzła
możemy ułożyć dwa równania równowagi (trzecie spełnione jest
tożsamościowo).
Ustroje statycznie niewyznaczalne. Metoda sił
Stopień statycznej niewyznaczalności
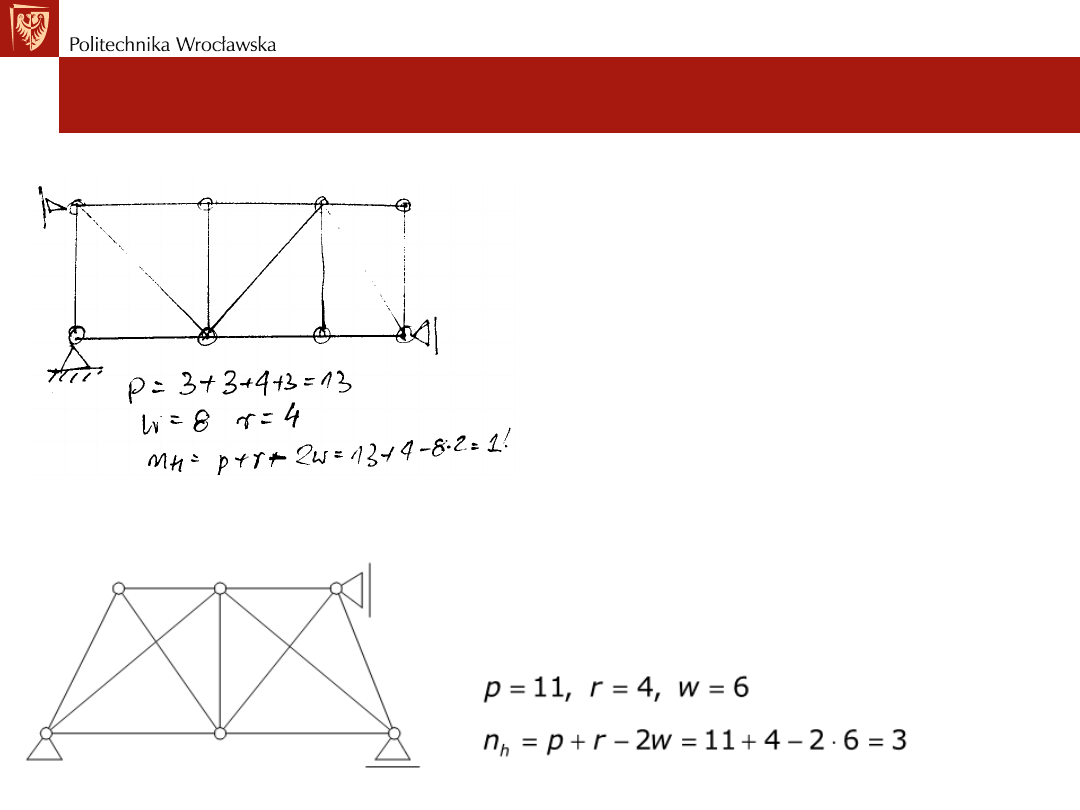
Przykład nr1: Określić SSN - nh dla kratownicy
Przykład nr2: Określić SSN - nh dla kratownicy
Ustroje statycznie niewyznaczalne. Metoda sił
Sformułowanie metody sił dla belek i ram
Algorytm postępowania w metodzie sił:
1) Sprawdzenie statycznej niewyznaczalności nh układu rozpatrywanego
rzeczywistego URZ, który jest statycznie niewyznaczalny SN i geomerycznie
niezmienny GN. Wyznaczenie liczby nadliczbowych więzi nh w układzie.
Układu SN nie da się rozwiązać (tj. wyznaczyć sił w więziach nadliczbowych) za
pomocą równań równowagi.
Algorytm postępowania w metodzie sił:
3) utworzenie układu podstawowego UP (który jest SW i GN)
poprzez wstawienie
w miejsce usuniętych więzi niewiadomych (szukanych) sił hiperstatycznych
(nadliczbowych), aby zachować kinematyczną i statyczną identyczność URZ z
nowym
UP,
4) określenie sumarycznych przemieszczeń po kierunkach działania niewiadomych sił
i zapisanie układu równań kanonicznych metody sił,
ponieważ w rzeczywistości
w miejscach usuniętych podpór
istniały więzy, które uniemożliwiały
przemieszczenia, przemieszczenia
w tych miejscach są równe zero.
Ustroje statycznie niewyznaczalne. Metoda sił
Sformułowanie metody sił dla belek i ram
Ustroje statycznie niewyznaczalne. Metoda sił
Sformułowanie metody sił dla belek i ram
Algorytm postępowania w metodzie sił:
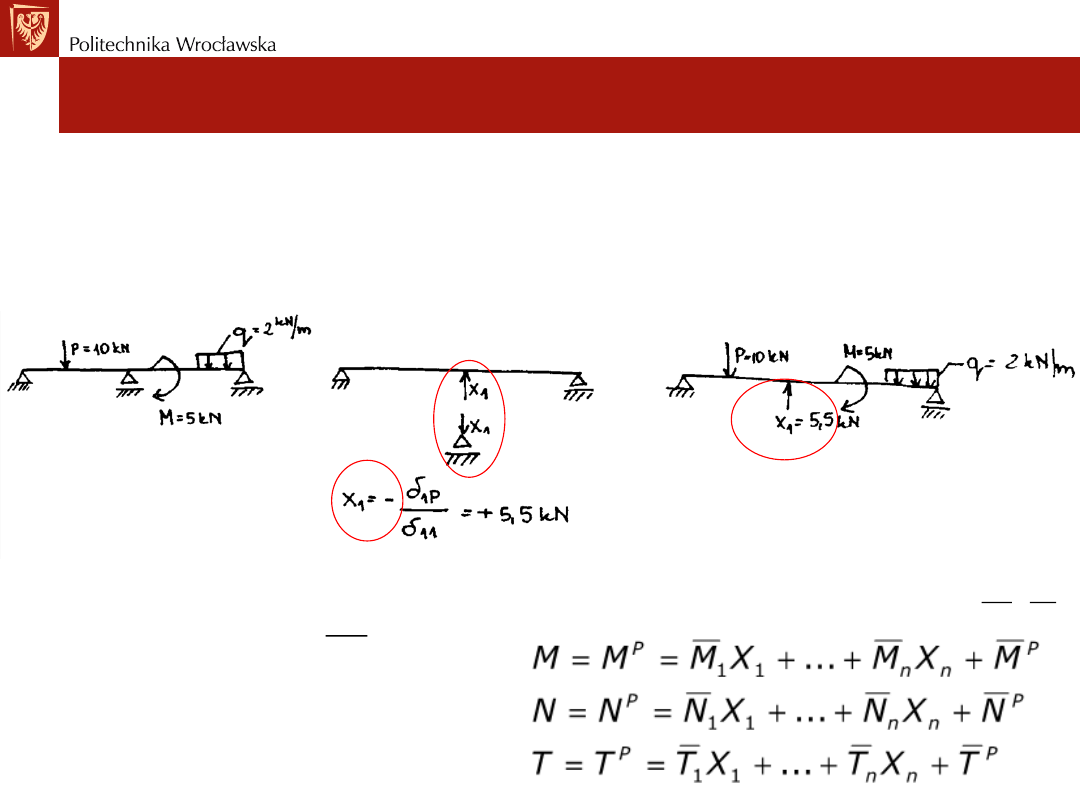
6) wyznaczenie wielkości sił przekrojowych (momentów zginających) od
obciążenia jednostkowego X1=1 i obciążenia danego P w UP,
7) wyznaczenie wartości przemieszczeń i niewiadomej (szukanych) siły X1,
7) wyznaczenie sił wewnętrznych
w URZ (SN i GN) przy użyciu
wyznaczonej wartości sił X1 w UP (SW i GN).
Ustroje statycznie niewyznaczalne. Metoda sił
Sformułowanie metody sił dla belek i ram.
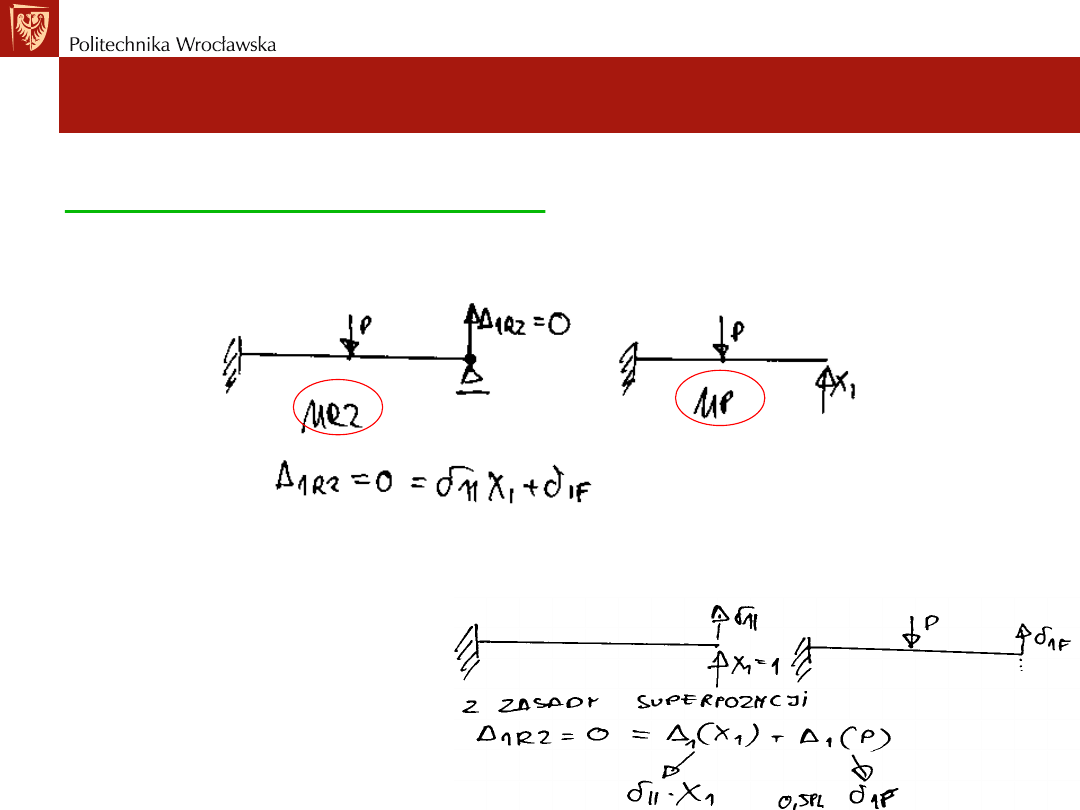
Idea rozwiązania metodą sił zadanego układu rzeczywistego URZ, który jest SN
i GN (geometrycznie niezmienny) sprowadza się do:
1. utworzenia układu podstawowego UP (SW i GN), który powstał z układu
rzeczywistego URZ (SN i GN) przez wprowadzenie w miejsce odrzuconej
więzów niewiadomej siły hiperstatycznych X1,
2. rozwiązania układu postawowego UP (układu SW) od obciążenia
hiperstatyczną siłą jednostkową X1 = 1 oraz od obciążenia zadanego P,
3. wyznaczeniu wartości niewiadomej siły hiperstatycznej X1 z równania
kanonicznego,
4. rozwiazaniu zadanego URZ (SN) poprzez rozwiązanie UP (SW) po
uwzględnieniu wartości wyznaczonej sił hiperstatycznej X1 i obciążenia
zadanego P.
Ustroje statycznie niewyznaczalne. Metoda sił
Układ podstawowy i układ równań kanonicznych
Układ podstawowy UP jest układem SW oraz GN i spełnia również trzy
warunki identyczności z zadanym układem rzeczywistym URZ:
• geometryczna (zgodność wymiarów),
• kinematyczna (zgodność przemieszczeń – równania kanoniczne),
• statyczna (zgodność obciążeń).
UP 1
UP 2
UP 3
Ustroje statycznie niewyznaczalne. Metoda sił
Układ podstawowy i układ równań kanonicznych
Jeżeli mamy układ prętowy URZ n-krotnie SN (n więzi nadliczbowych).
Musimy wyznaczyć n sił hiperstatycznych X1,…, Xn w więziach
nadliczbowych, których nie uzyskuje się bezpośrednio z warunków
równowagi.
Obok równań równowagi (3 równania) należy ułożyć dodatkowych n-
równań (w formie układu równań kanonicznych) z których wyznaczymy
wartości n-sił hiperstatycznych X1,…, Xn w więziach nadliczbowych.
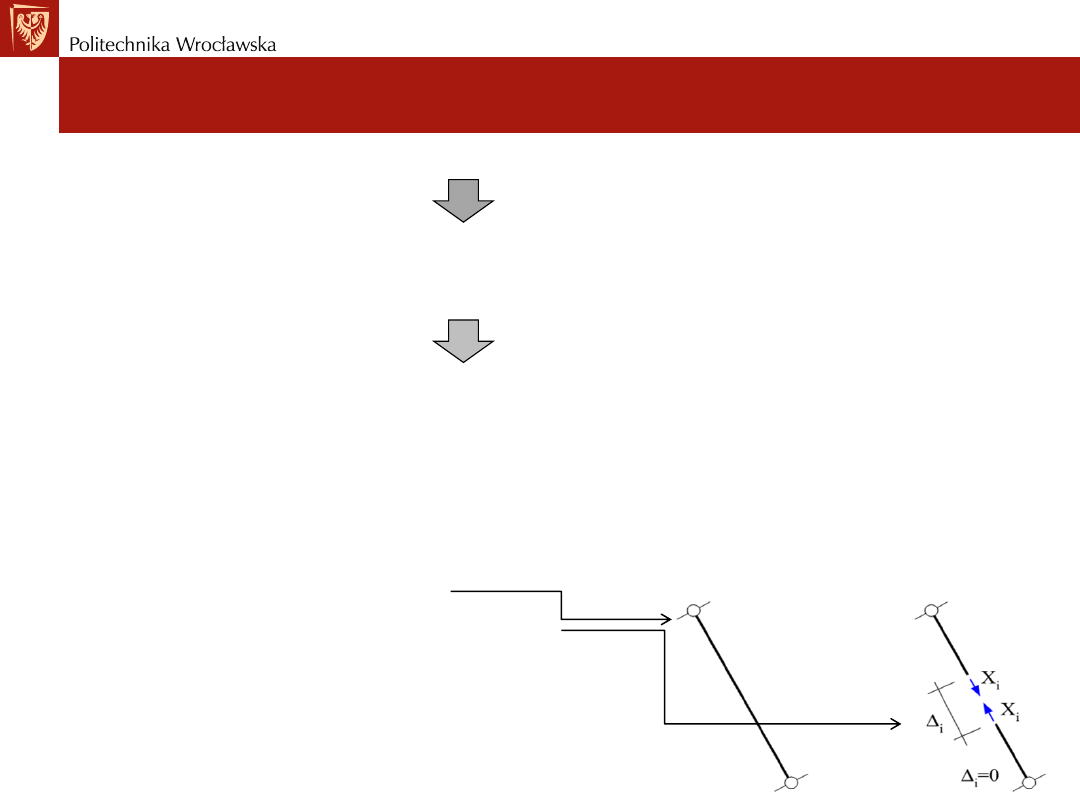
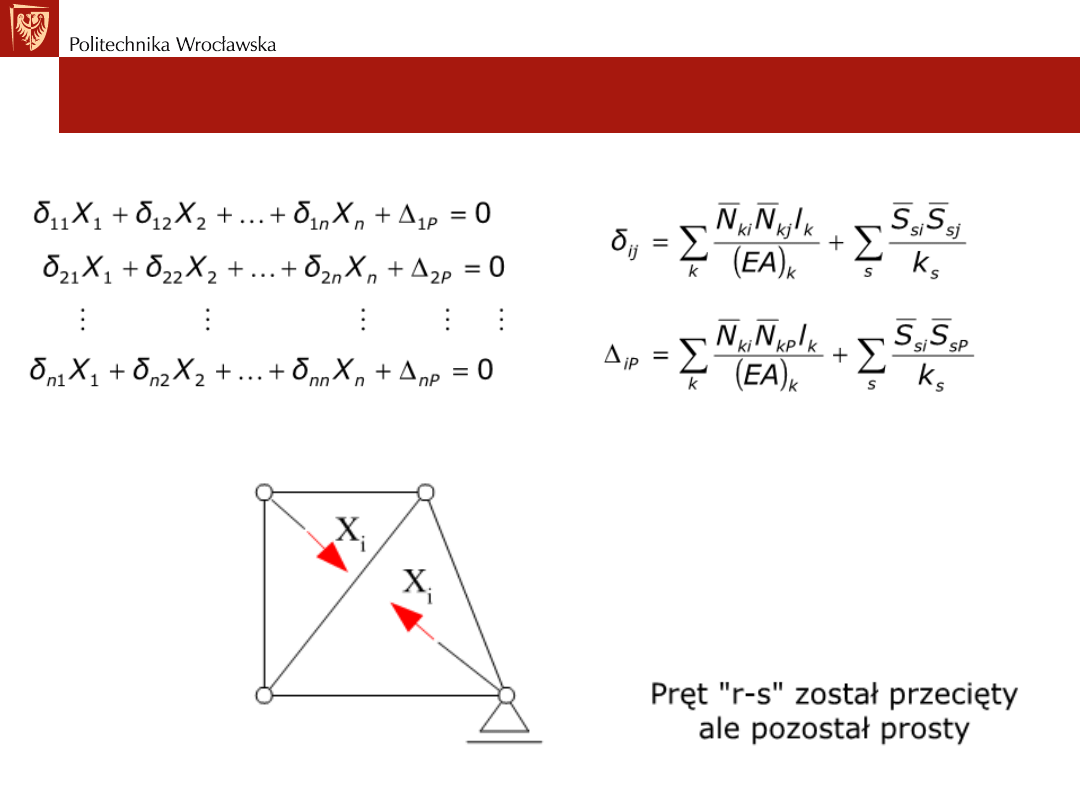
• Rozpatrzmy więź hiperstatyczną „i” którą przecinamy.
• W URZ więź jest nieprzecięta.
• W UP jest przęcięta i występuje siła Xi.
Ustroje statycznie niewyznaczalne. Metoda sił
Układ podstawowy i układ równań kanonicznych
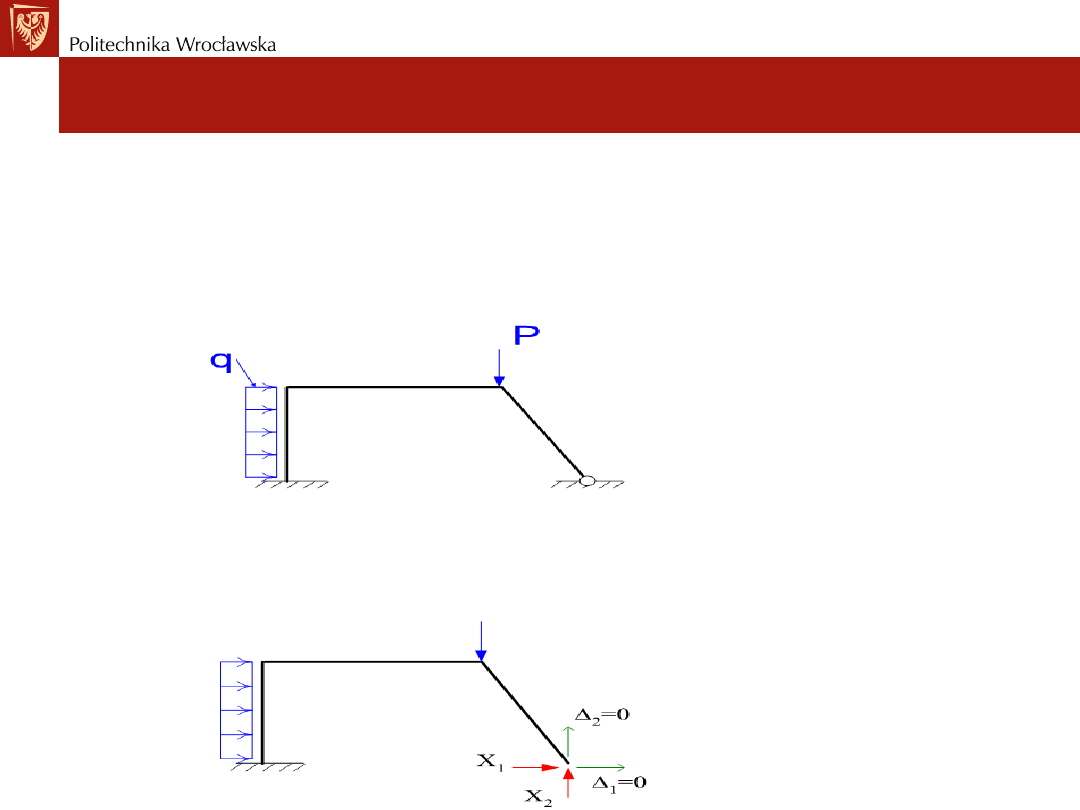
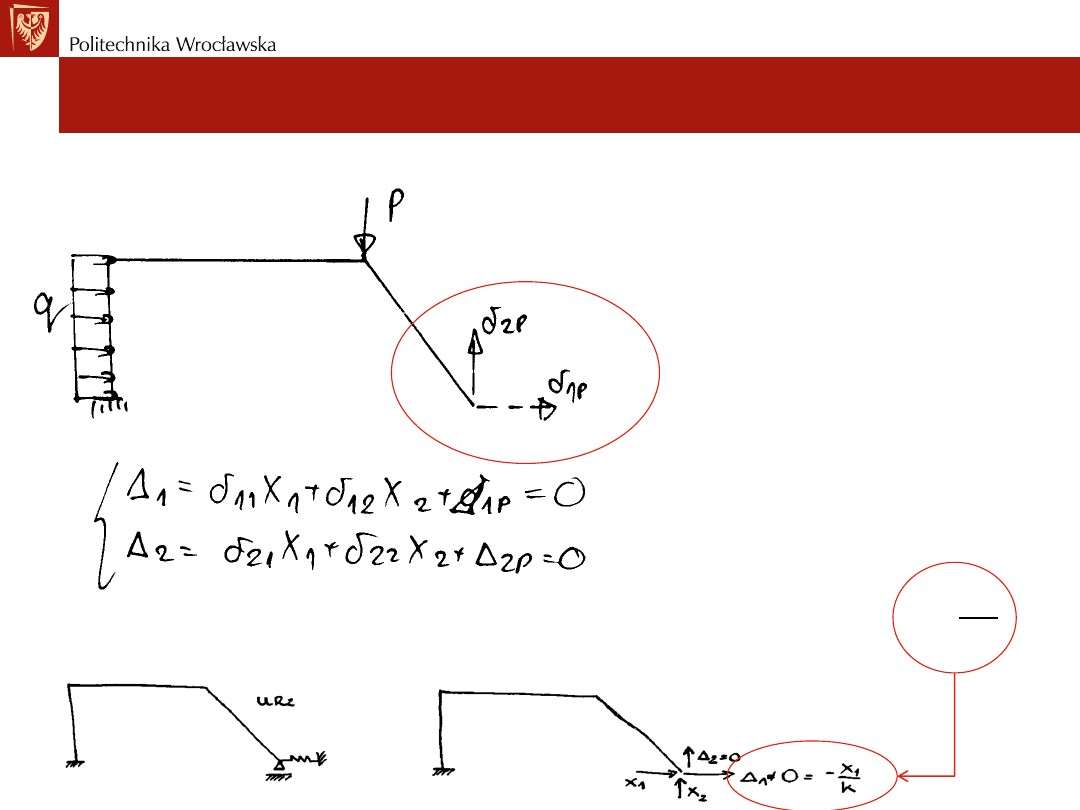
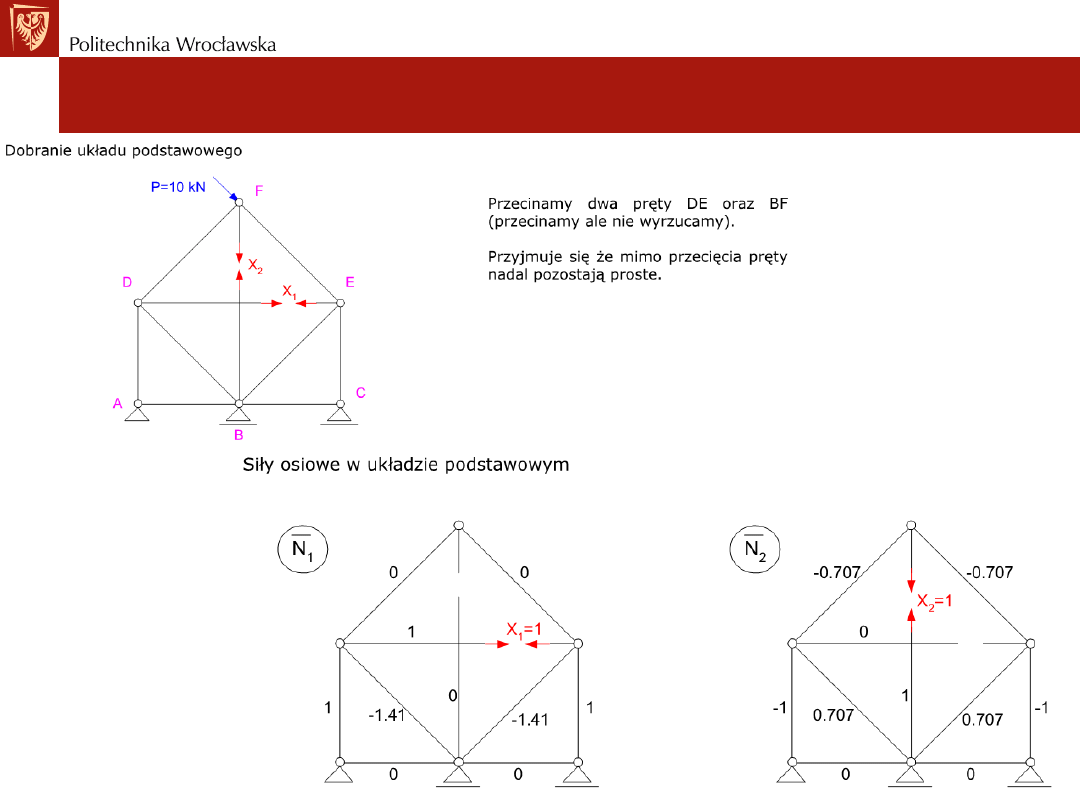
W rzeczywistym układzie przecinamy n-więzi
(np. 2)
nadliczbowych i
w miejscu tych więzi przykładamy dodatkowe nieznane siły
hiperstatyczne w postaci X1,...,Xn
(np. X1 i X2)
. Układ z przeciętymi
więziami nadliczbowymi i przyłożonymi siłami X1,...,Xn
(np. X1 i X2)
w
ich miejsce to Układ Podstawowy Metody Sił.
Otrzymujemy n-warunków na przemieszczenia w układzie
podstawowym ∆i=0 (i=1,2,...,n) (np. 2 warunki ∆1=0 i ∆2=0), które
prowadzą do liczby n (np. 2) dodatkowych równań:
URZ
UP
Ustroje statycznie niewyznaczalne. Metoda sił
Układ podstawowy i układ równań kanonicznych
Przemieszczenia ∆i (i=1,2,...,n) w miejscu przeciętych więzi
nadliczbowych, gdzie występuj wielkości hiperstatyczne Xi (i=1,2,...,n)
(np. X1 i X2) obliczamy w UP od wszystkich wpływów, a więc od
obciążenia zewnętrznego (typu P,q,M) oraz od wielkości hiperstatycznych
Xi (np. od X1 i od X2).
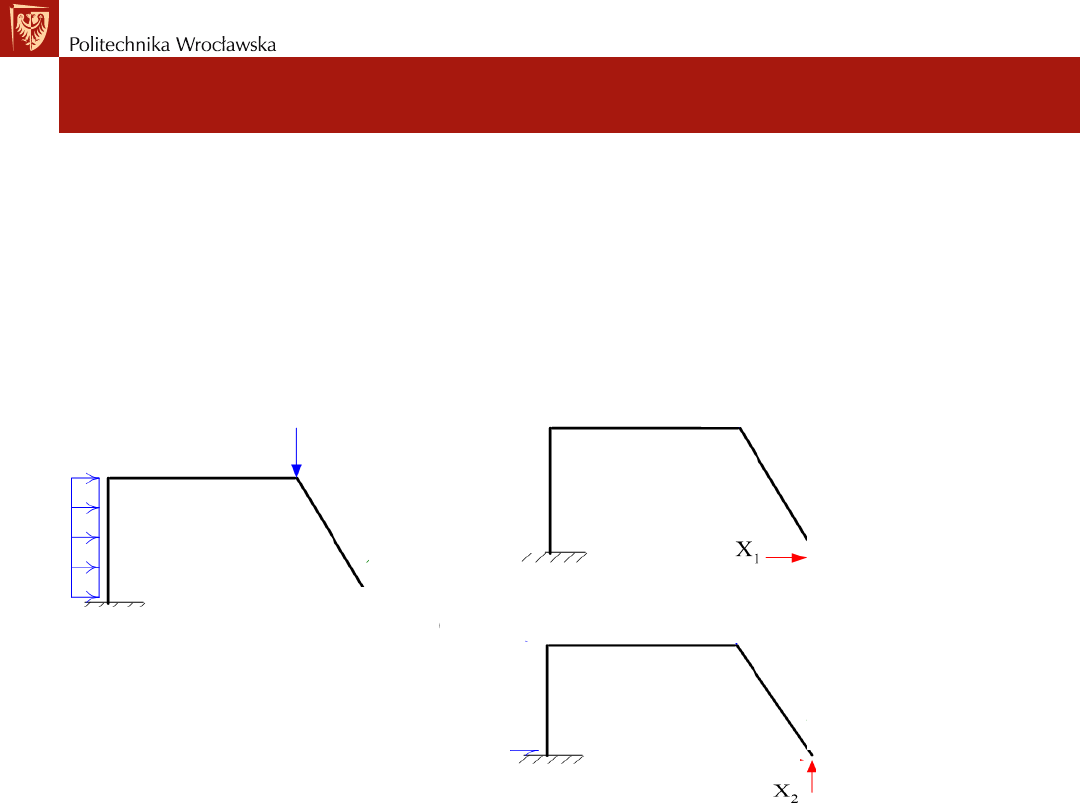
Układy te tj. 1. od P,q,M, 2. od X1=1 i 3. od X2=1 traktujemy i
rozwiązujemy osobno.
UP od obc. danego PqM
UP od obc. X2=1
UP od obc. X1=1
Ustroje statycznie niewyznaczalne. Metoda sił
Układ podstawowy i układ równań kanonicznych
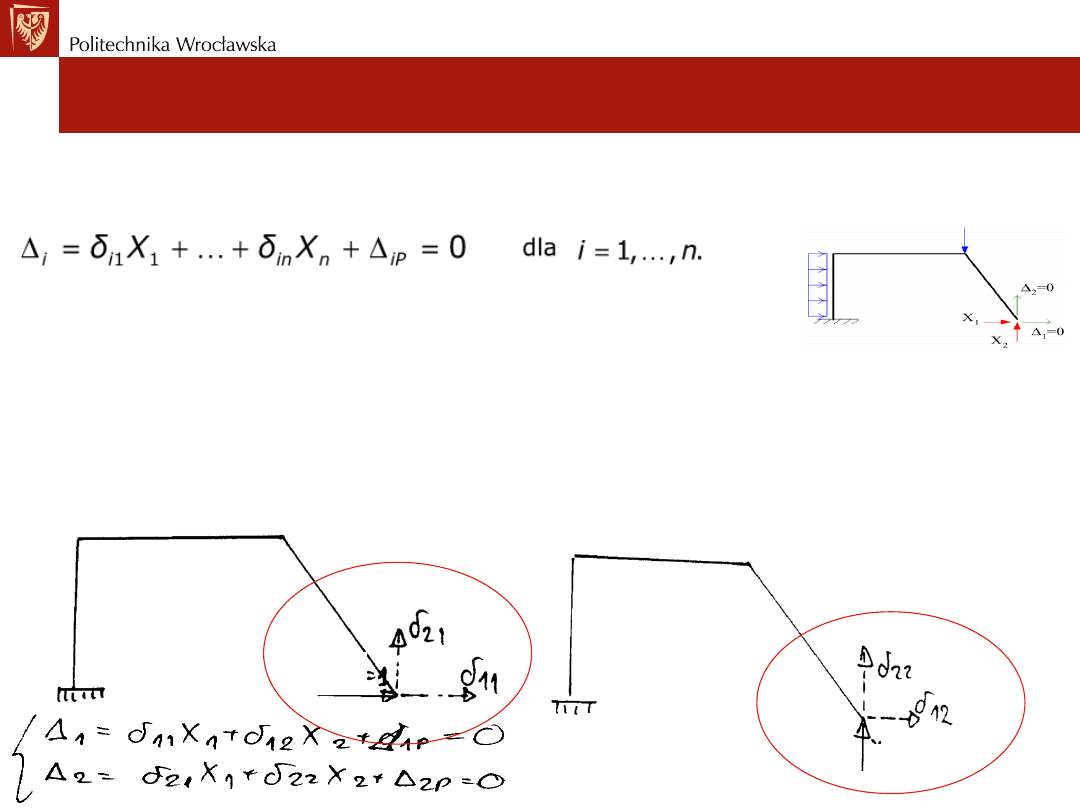
Wyznaczamy przemieszczenie ∆i(i=1,2,...,n) (np. ∆1 i ∆2) w układzie
podstawowym jako sumę przemieszczeń od wszystkich wpływów w postaci:
gdzie przemieszczenie:
• ∆
iP
to przemieszczenie od obciążenia zewnętrznego P,q,M
• δ
ij
Xj to przemieszczenie od wielkości hiperstatycznych X
j
,
• δ
ij
to przemieszczenie od wielkości hiperstatycznych X
j
=1.
Od wpływu X1=1 i X2=1 mamy następujące przemieszczenia:
X2=1
X1=1
Ustroje statycznie niewyznaczalne. Metoda sił
Układ podstawowy i układ równań kanonicznych
Od wpływu P,q,M mamy następujące przemieszczenia:
Gdy podparcie jest sprężyste o sztywności k, to
∆
𝑖
≠ 0 i wynosi ∆
𝑖
=
−𝑋
𝑖
𝑘
.
Ustroje statycznie niewyznaczalne. Metoda sił
Układ podstawowy i układ równań kanonicznych
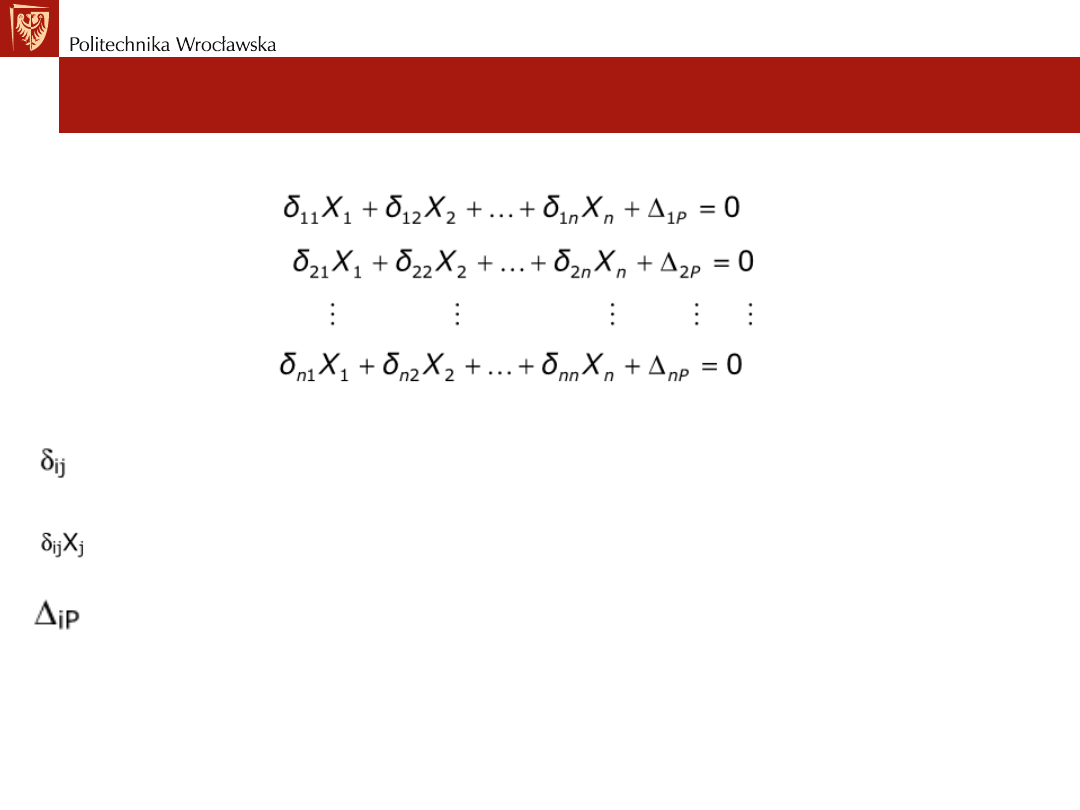
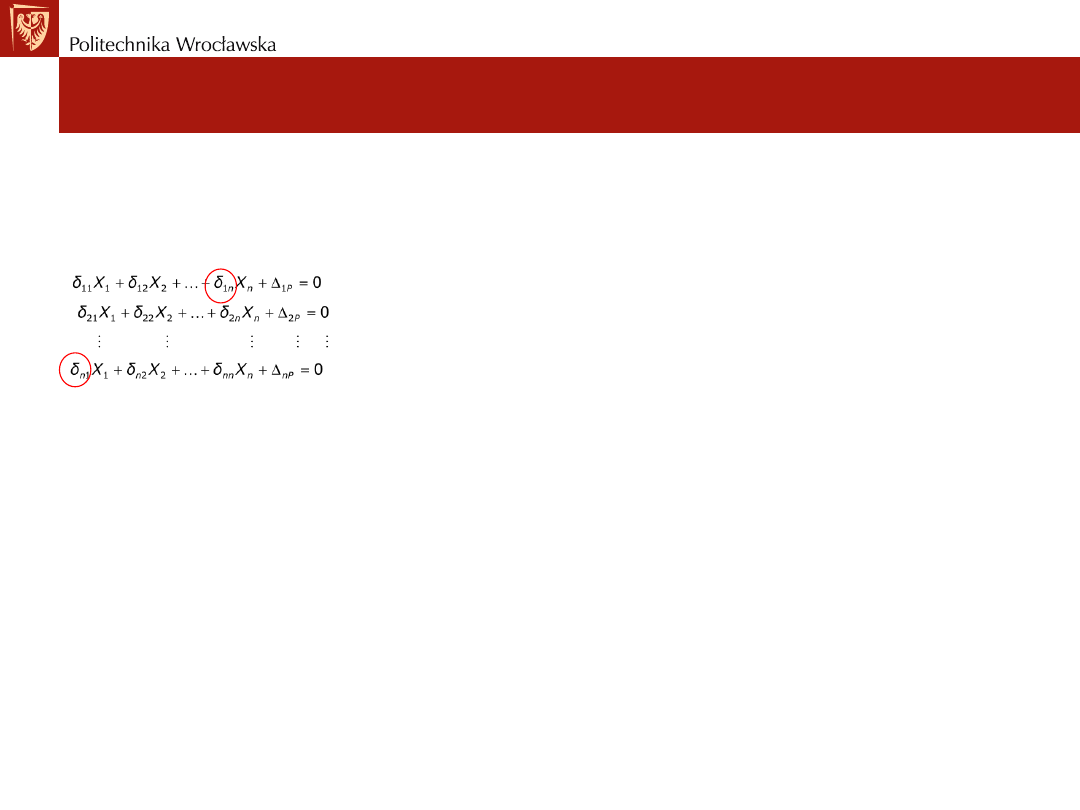
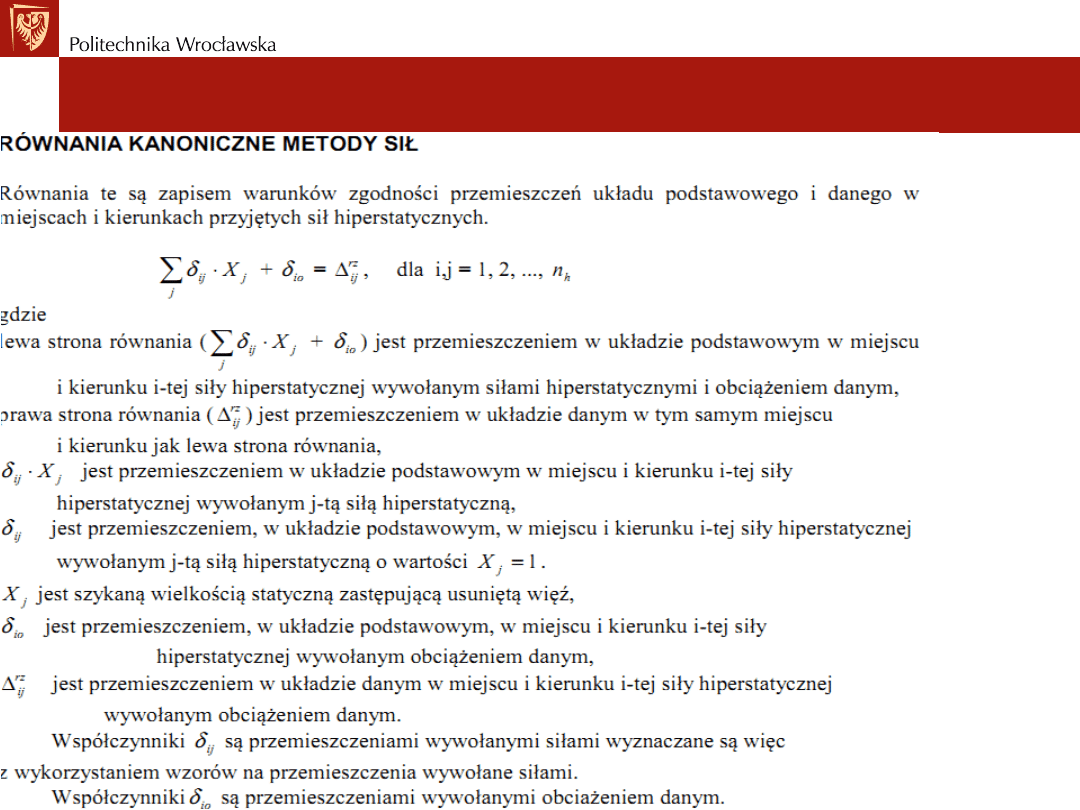
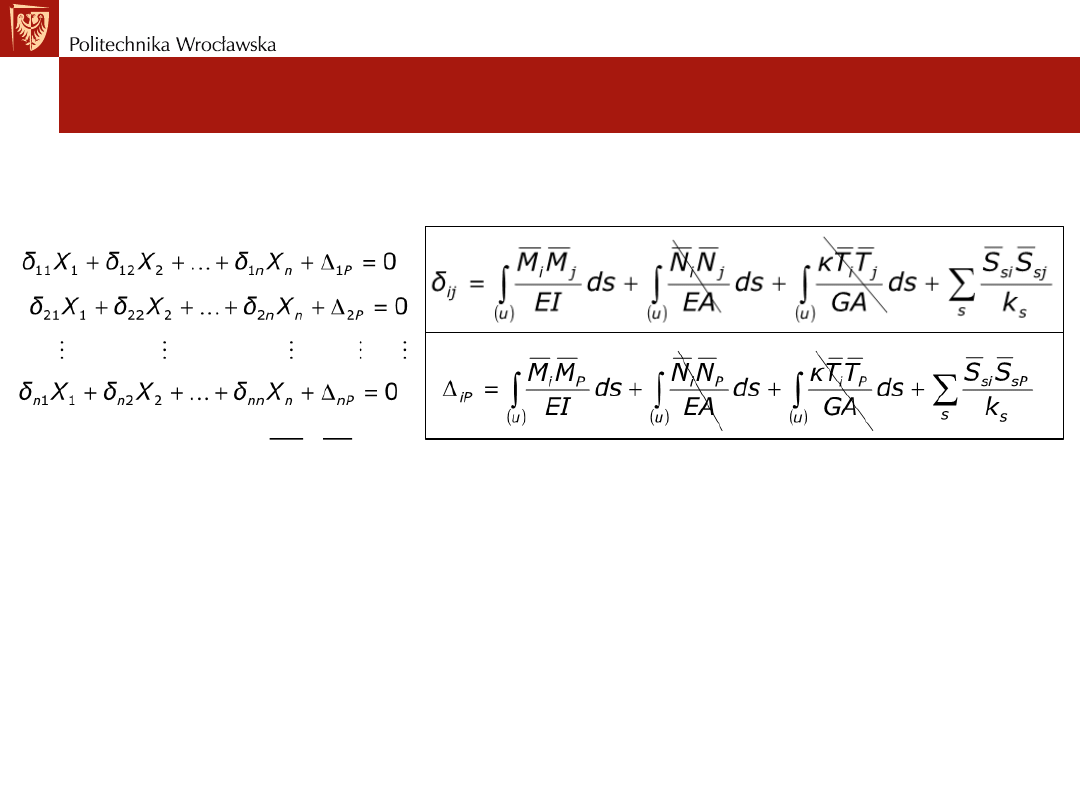
Po rozpisaniu kanoniczny układ równań metody sił ma postać:
sens fizyczny poszczególnych wyrażeń:
przemieszczenie w miejscu i kierunku wielkości hiperstatycznej Xi wywołane
wielkością hiperstatyczną Xj=1 w UP;
przemieszczenie w miejscu i kierunku wielkości hiperstatycznej Xi wywołane
wielkością hiperstatyczną Xj w UP;
przemieszczenie w miejscu i kierunku wielkości hiperstatycznej Xi wywołane
obciążeniem zewnętrznym w UP;
Ustroje statycznie niewyznaczalne. Metoda sił
Układ podstawowy i układ równań kanonicznych
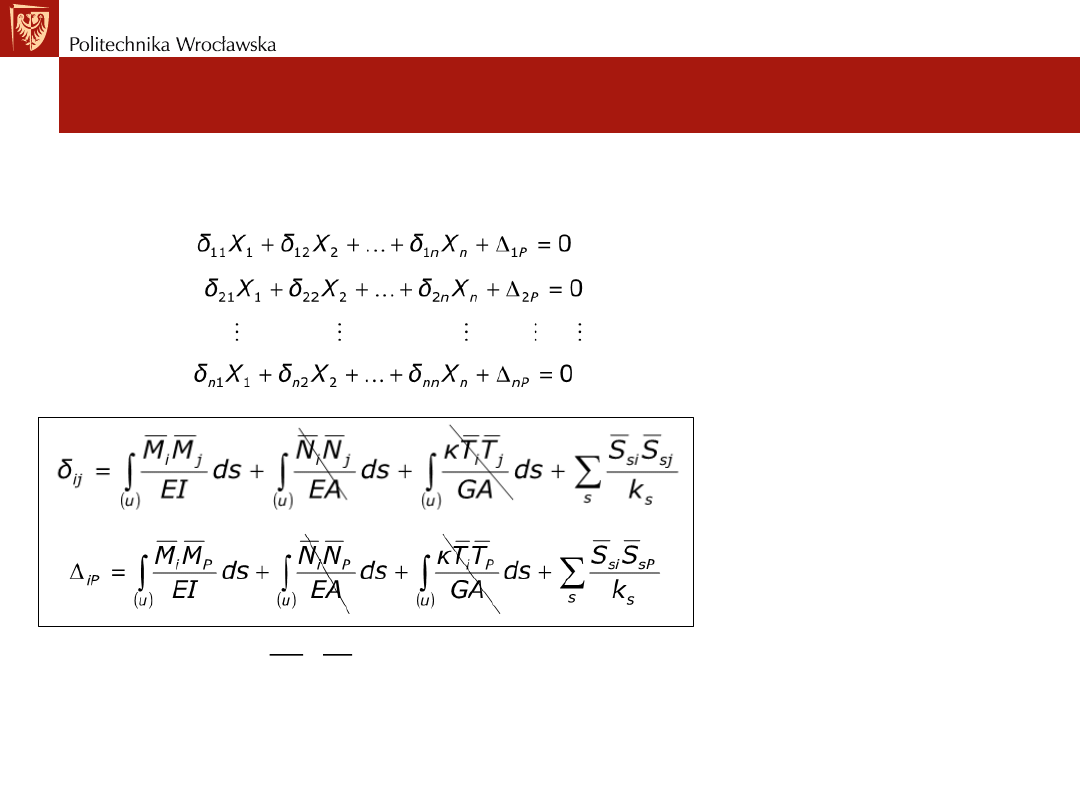
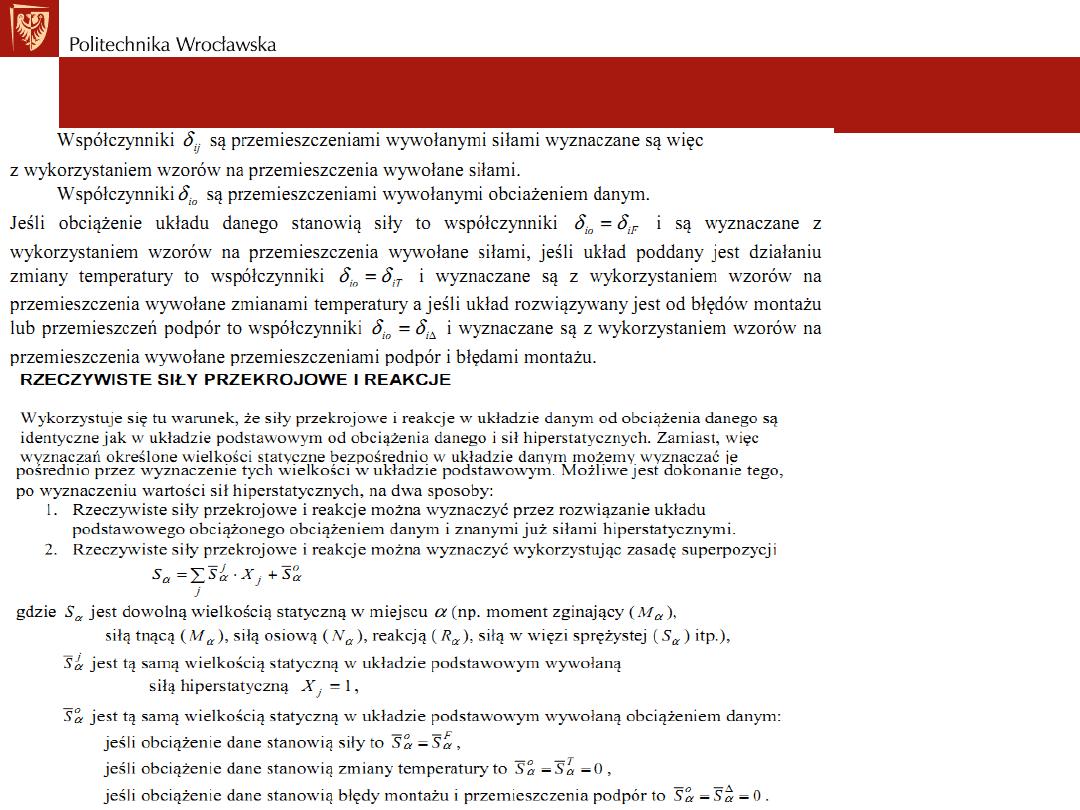
Ze wzorów na wyznaczanie przemieszczeń współczynniki w
kanonicznym układzie równań metody sił określone są wzorami:
• Kreseczka nad
𝑀
𝑖
,
𝑁
𝑖
,
𝑇
𝑖
(siły wewnętrzne) oraz 𝑆
𝑖
(siły w więziach
sprężystych) oznacza, że są one wyznaczone
w UP czyli SW
.
• W ramach i belkach wpływ T i N (siły tnące i osiowe) jest mały,
przyjmujemy EA=∞ oraz GA=∞ i dlatego pomijamy niektóre całki.
Ustroje statycznie niewyznaczalne. Metoda sił
Układ podstawowy i układ równań kanonicznych
Wnioski i spostrzeżenia:
• Macierz podatności (współczynników) utworzona na podstawie
współczynników równań kanonicznych jest symetryczna,
• Równania kanoniczne są nieodłącznym składnikiem układu
podstawowego, gdyż zapewniają kinematyczną zgodność z układem
rzeczywistym,
• Z równań kanonicznych można obliczyć wartości niewiadomych sił
hiperstatycznych Xi.
Po rozwiązaniu układu równań otrzymuje się nadliczbowe wielkości
hiperstatyczne X1, …., Xn, (np. X1 i X2) a następnie wyznacza się
rzeczywiste (w układzie SN) sił przekrojowe M, N, T oraz reakcje.
Można tego dokonać na dwa sposoby.
Ustroje statycznie niewyznaczalne. Metoda sił
Układ podstawowy i układ równań kanonicznych
1) W układzie podstawowym, który jest SW występuje znane obciążenie
zewnętrzne oraz obciążenie znanymi już siłami hiperstatycznymi X1,…, Xn.
Rozwiązujemy układ podstawowy UP (SW) obciążony obciążeniem
zewnętrznym i siłami hiperstatycznymi i jako rezultat otrzymujemy siły
przekrojowe M, N, T czyli siły przekrojowe w URZ (SN).
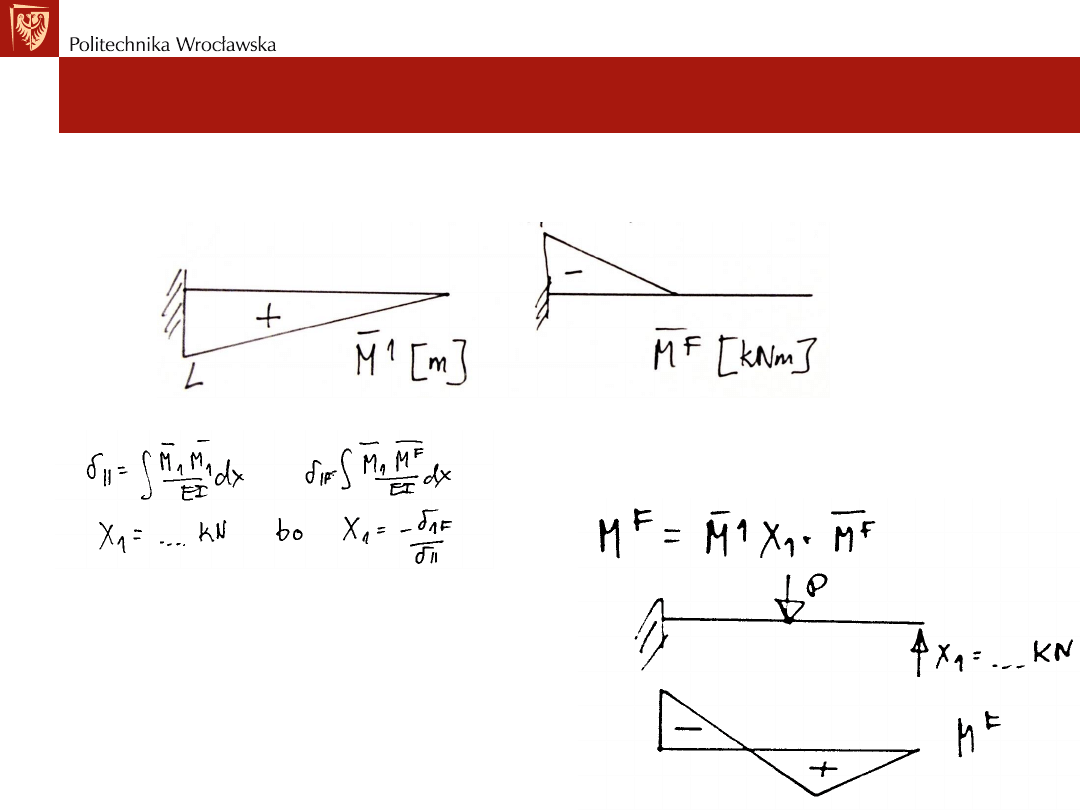
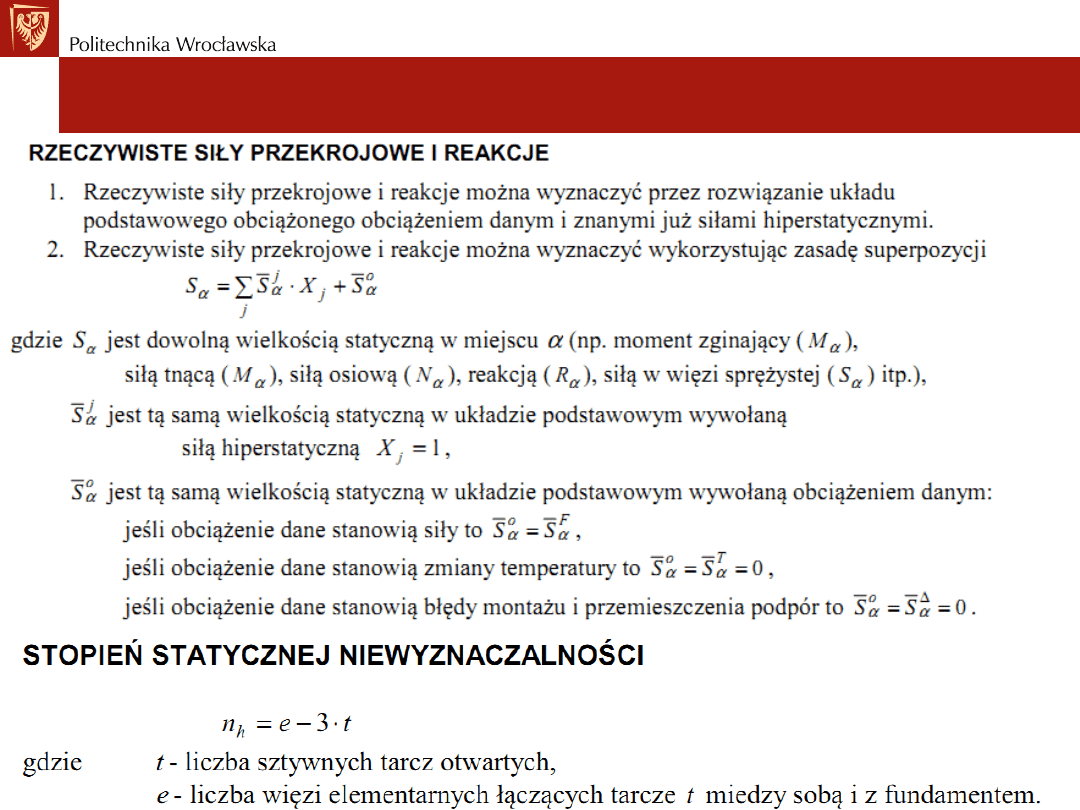
2) Drugi sposób wyznaczania sił przekrojowych polega na wykorzystaniu zasady
superpozycji. Wykorzystujemy już znane wykresy sił przekrojowych
𝑀
𝑖
,
𝑁
𝑖
,
𝑇
𝑖
(i=1,2,...,n) oraz
𝑀
𝑃
.
Rzędne rzeczywistych wykresów
sił przekrojowych
wyznaczamy
z następujących zależności:

Ustroje statycznie niewyznaczalne. Metoda sił
Kontrola poprawności rozwiązania
Kontrola poprawności rozwiązania:
1. Sprawdzenie czy wszystkie obciążenia (reakcje) spełniają warunki
równowagi – sprawdzamy równowagę sił na prętach (równowaga sił
poziomych i pionowych) i w węzłach (równowaga momentów).
2. Sprawdzenie ciągłości konstrukcji w wybranych punktach – w miejscu
wielkości hiperstatycznych.
Ponieważ w układzie rzeczywistym SN (hiperstatycznym) więzi nadliczbowe
nie istnieją (nie są przecięte), przemieszczenia na kierunkach tych więźi
powinny być równe zero (∆
i
=0 dla i=1,2,…,n).
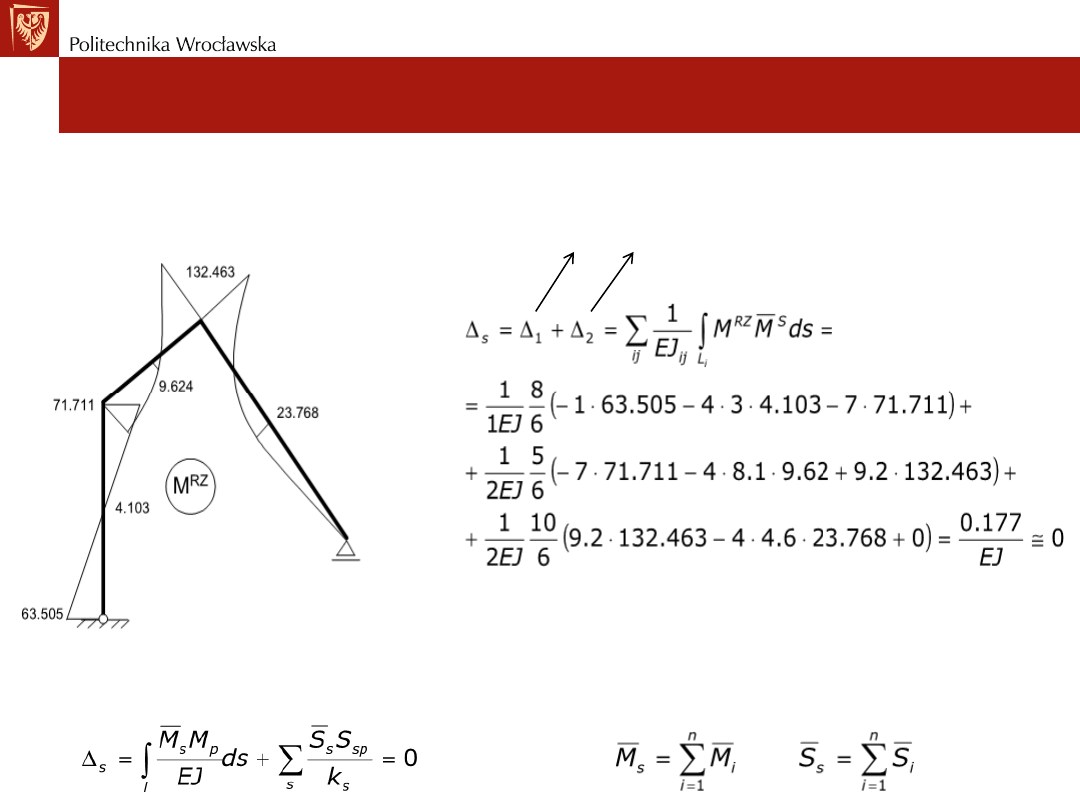
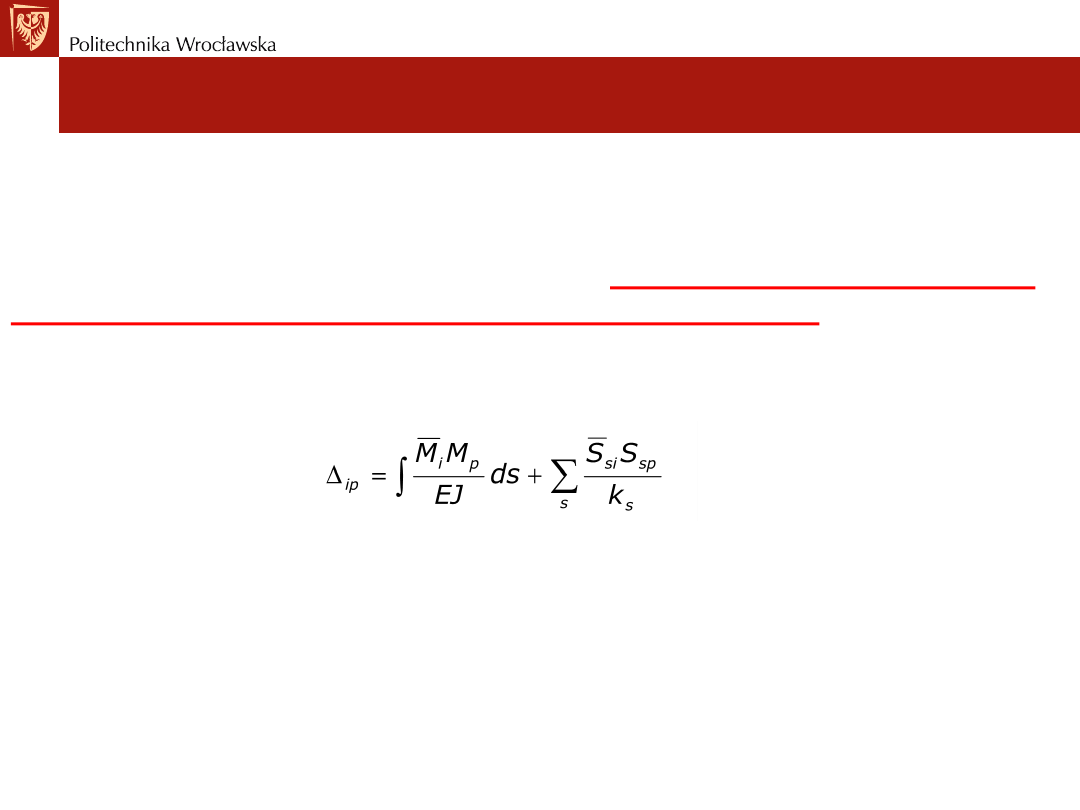
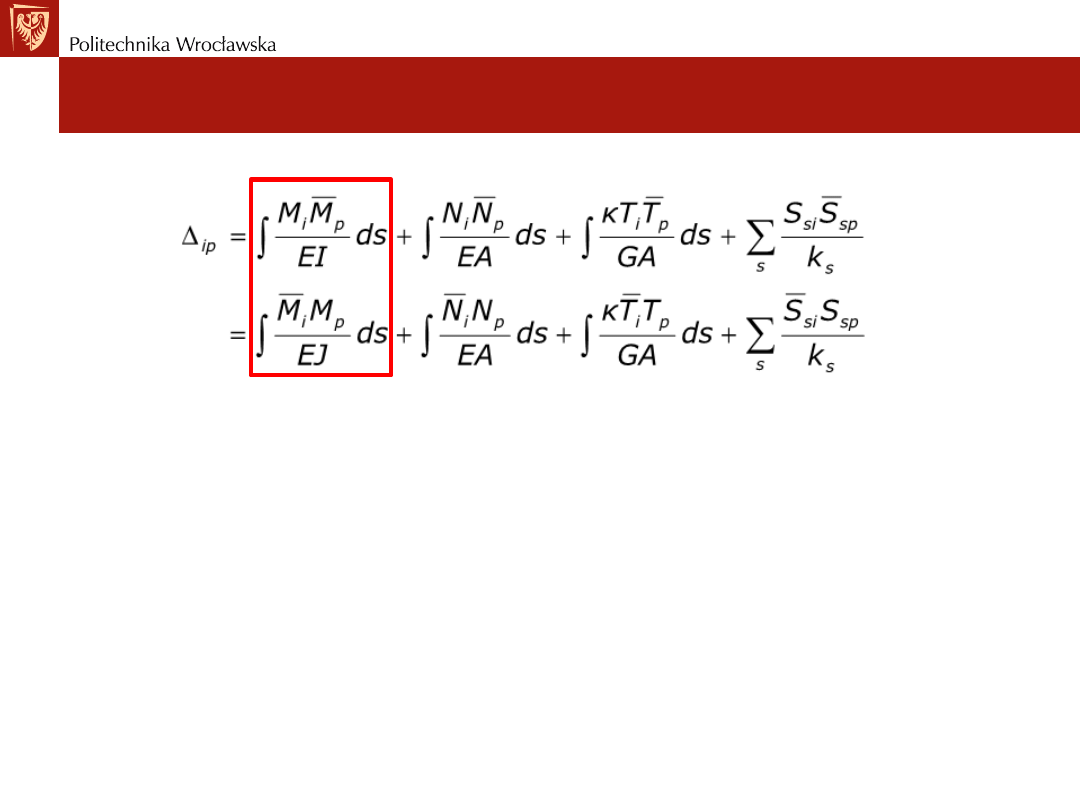
W przypadku obciążenia siłami przemieszczenie ∆
i
wynosi
gdzie M
p
i S
sp
są momentami zginającymi i siłami w więziach sprężystych
występują w układzie rzeczywistym (SN) czyli te wyliczone oraz
𝑀
𝑖
i
𝑆
𝑠𝑖
są
momentami zginającymi i siłami w więziach sprężystych występujące w
układzie podstawowym (SW).
Ustroje statycznie niewyznaczalne. Metoda sił
Układ podstawowy i układ równań kanonicznych
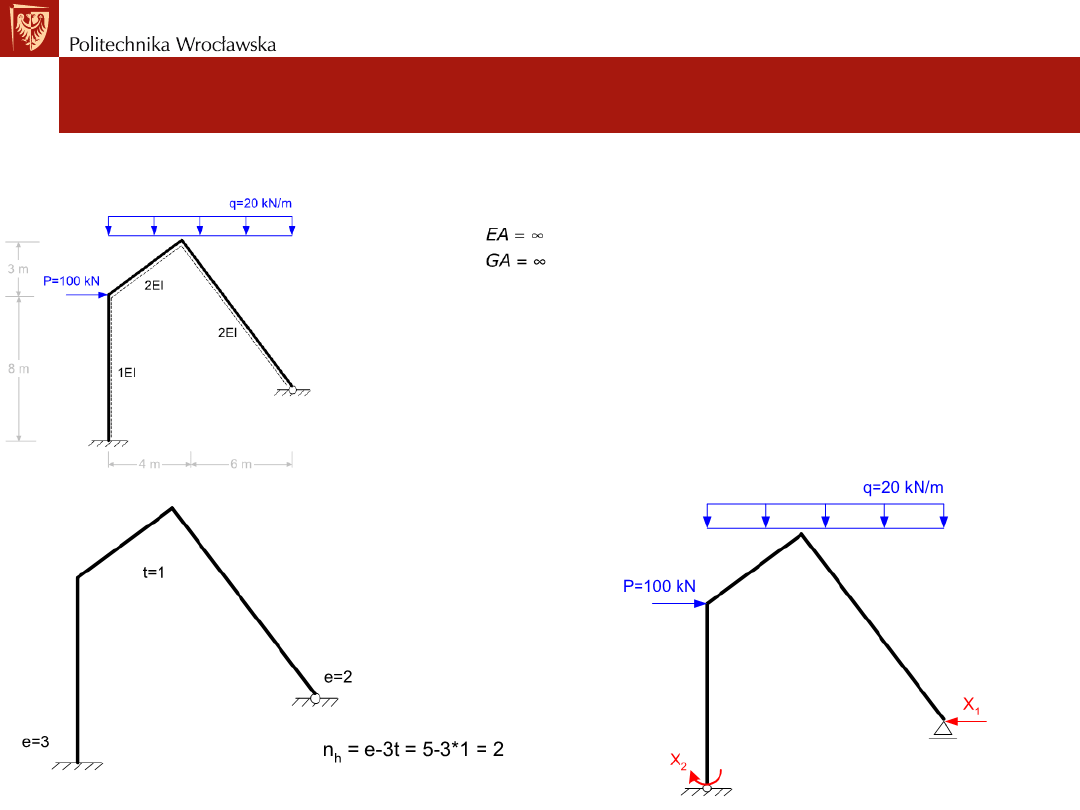
• Przykład nr1. Rozwiązanie ramy metodą sił
określenie SSN i dobranie UP
Ustroje statycznie niewyznaczalne. Metoda sił
Układ podstawowy i układ równań kanonicznych
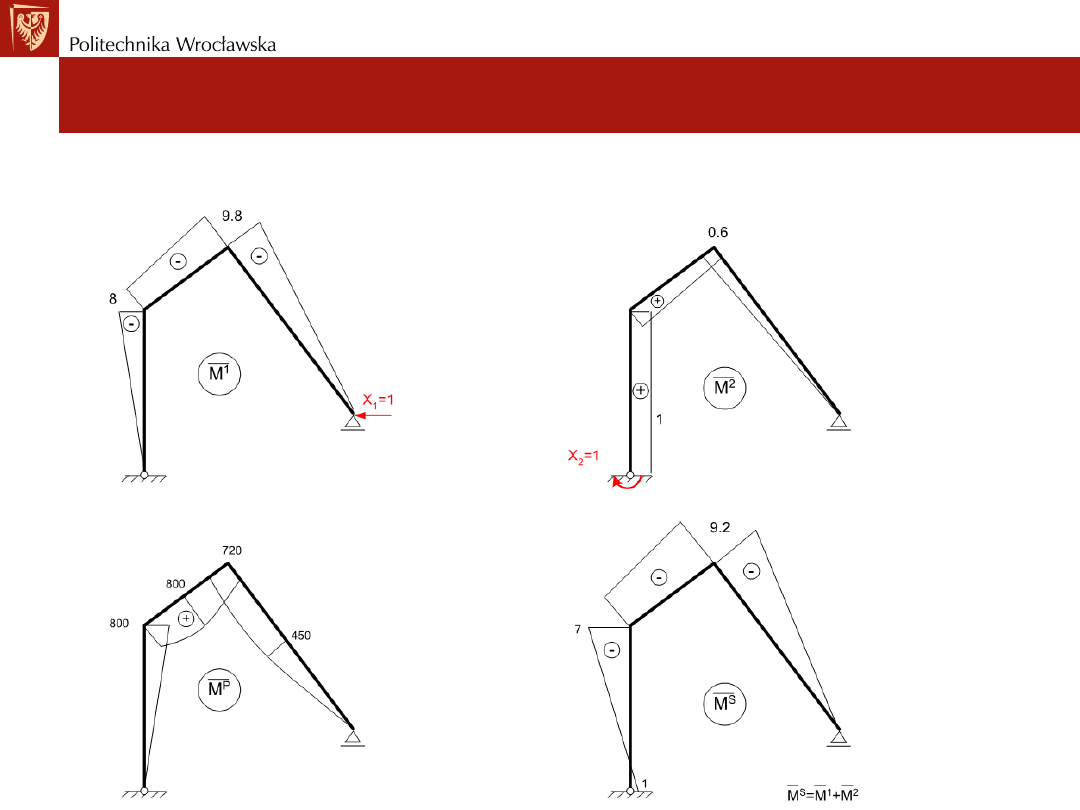
• Wykresy momentów zginających w UP
Ustroje statycznie niewyznaczalne. Metoda sił
Układ podstawowy i układ równań kanonicznych
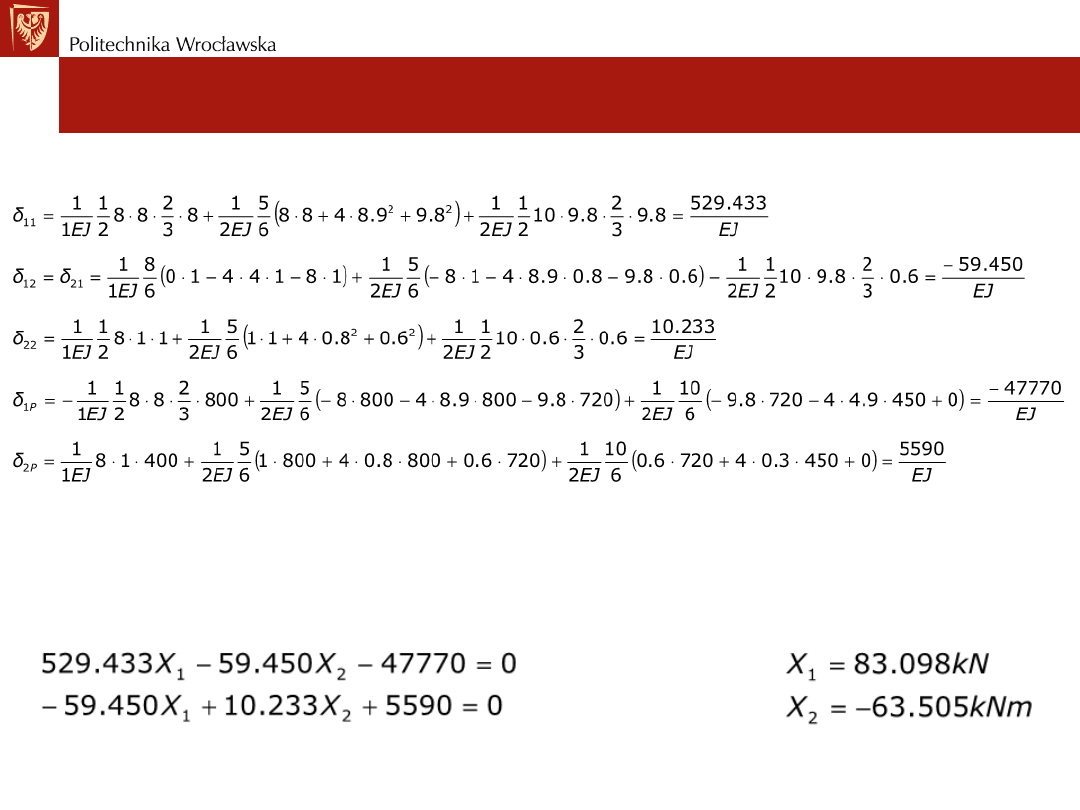
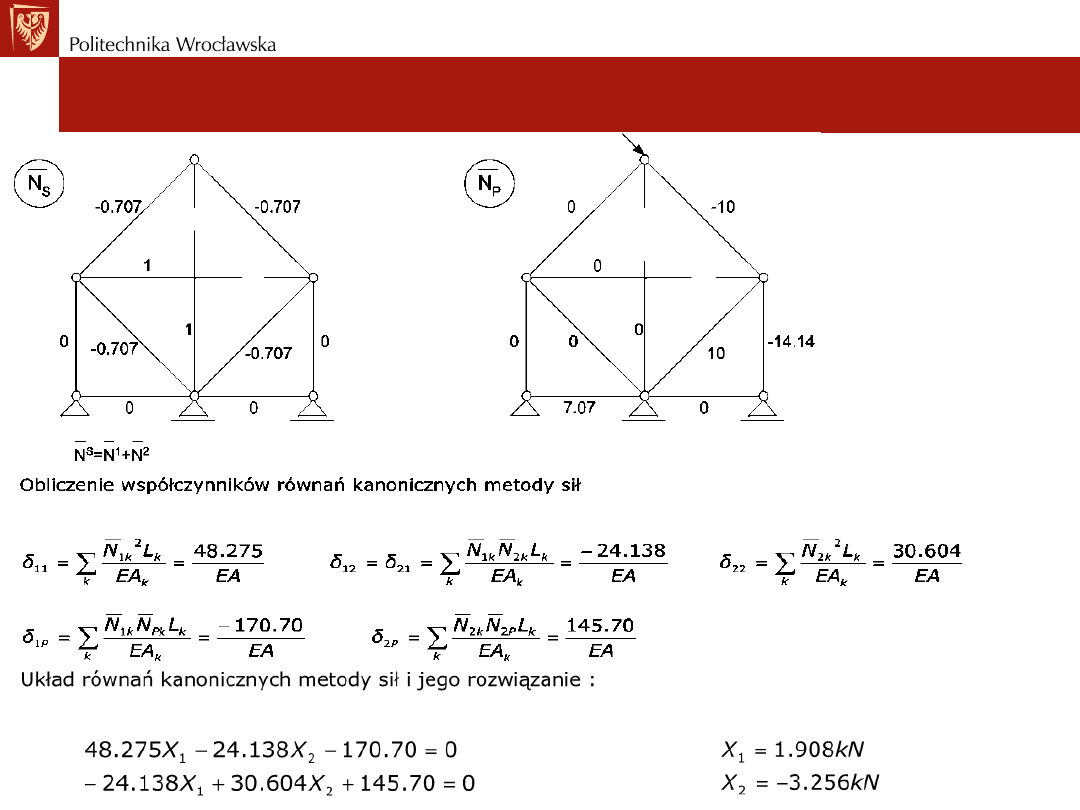
• Obliczenia współczynników równań kanonicznych
• Układ kanoniczny metody sił i jego rozwiązanie
Ustroje statycznie niewyznaczalne. Metoda sił
Układ podstawowy i układ równań kanonicznych
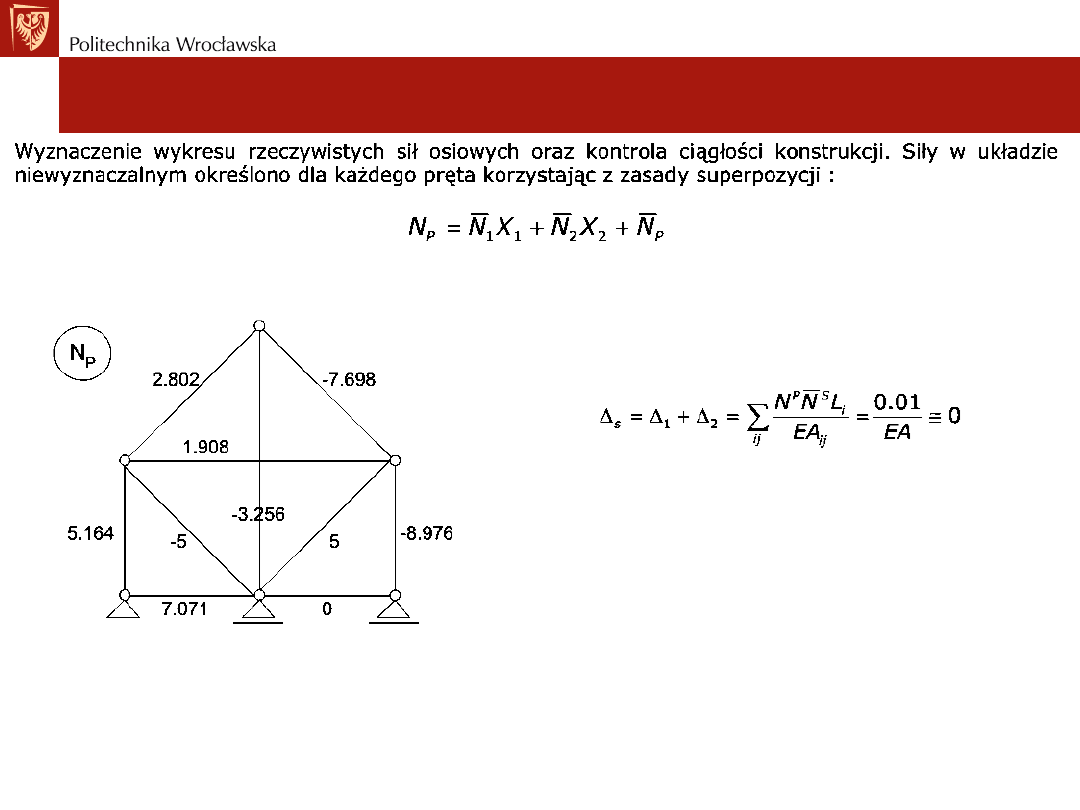
• Wyznaczenie wykresu rzeczywistych momnetów zgnających oraz kontrola
ciągłości konstrukcji
0
0
Ponieważ ∆i=0 dla i=1,…,n stąd ∆s=∆1+…∆n=0 więc wykonujemy jedną
kontrolę sprawdzając:
gdzie
Ustroje statycznie niewyznaczalne. Metoda sił
Sformułowanie metody sił dla kratownic
Dla kratownic wzory w ramach Metody Sił ulegają modyfikacji:
Ustroje statycznie niewyznaczalne. Metoda sił
Sformułowanie metody sił dla kratownic
• Przykład: kratownice rozwiązać metodą sił
Ustroje statycznie niewyznaczalne. Metoda sił
Sformułowanie metody sił dla kratownic
Ustroje statycznie niewyznaczalne. Metoda sił
Sformułowanie metody sił dla kratownic
Ustroje statycznie niewyznaczalne. Metoda sił
Sformułowanie metody sił dla kratownic
Ustroje statycznie niewyznaczalne. Metoda sił
Belki statycznie niewyznaczalne
W metodzie sił przyjęcie odpowiedniego schematu podstawowego
może znacznie uprościć obliczenia.
Jeżeli to możliwe staramy się tak dobrać układ podstawowy, aby jak
najwięcej współczynników równań kanonicznych była równa zeru.
Poniżej pokażemy przykład takiego schematu podstawowego dla
szczególnego przypadku – belki ciągłej.
Rozwiązując metodą sił belki ciągłe – jako wielkości hiperstatyczne
wygodnie jest przyjąć momenty zginające nad podporami pośrednimi
(kolejno).
Ustroje statycznie niewyznaczalne. Metoda sił
Belki statycznie niewyznaczalne
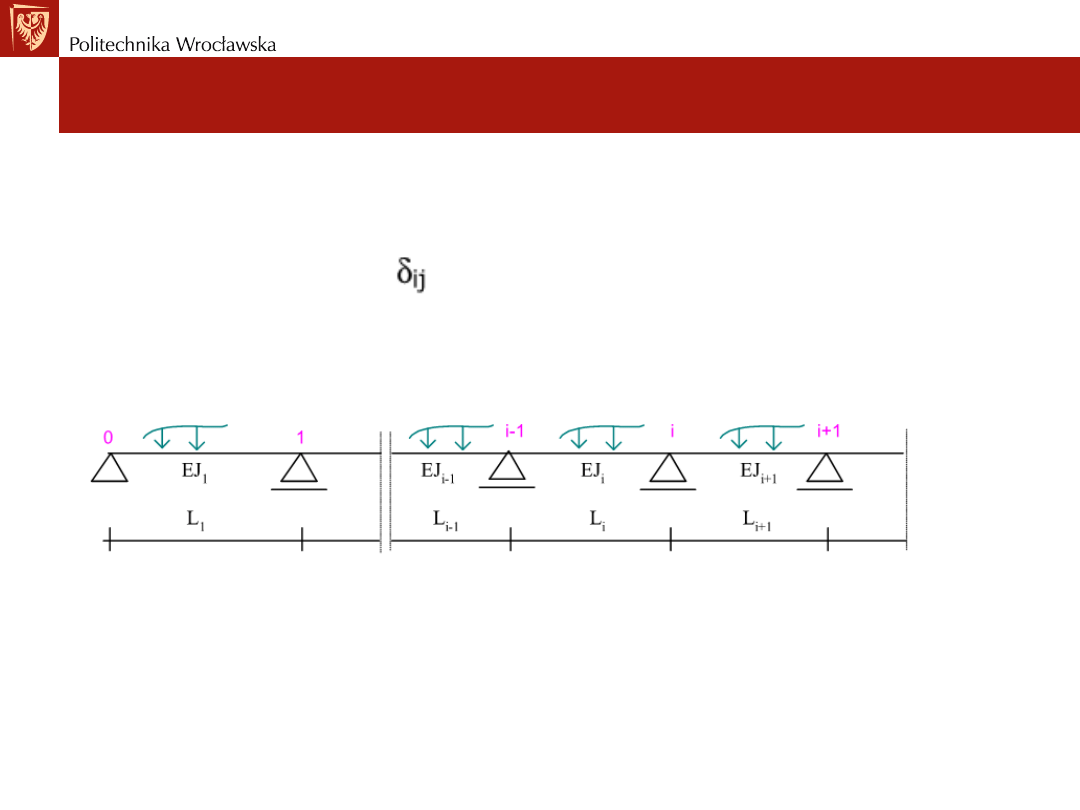
Prowadzi to do układu równań, w którym w pojedynczym równaniu
występują najwyżej trzy niewiadome. Rozpatrzmy belkę ciągłą jak na
rysunku poniżej. Układ podstawowy metody sił
URZ
UP
Ustroje statycznie niewyznaczalne. Metoda sił
Belki statycznie niewyznaczalne
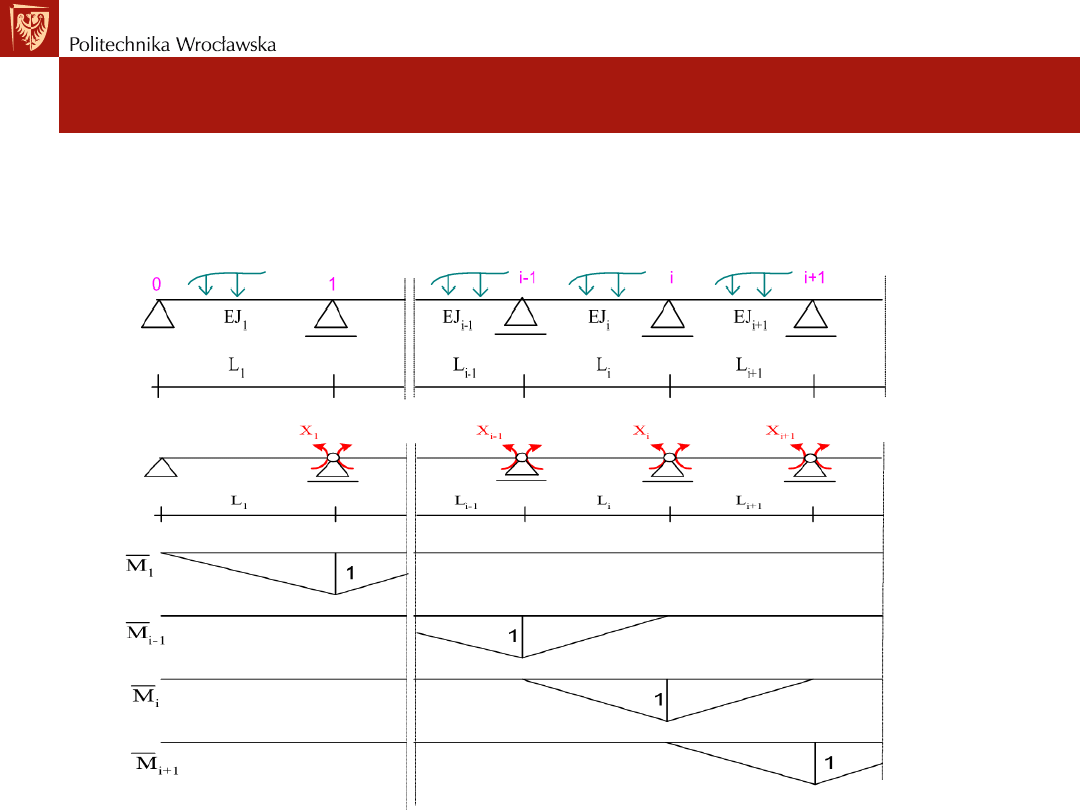
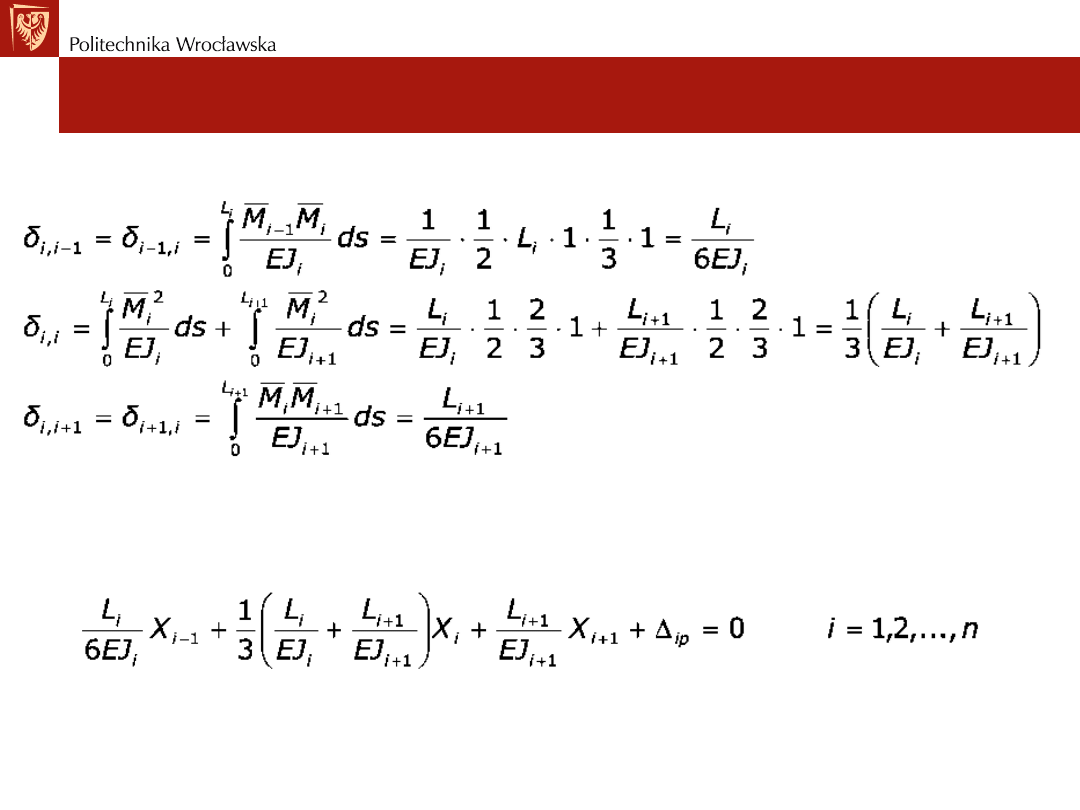
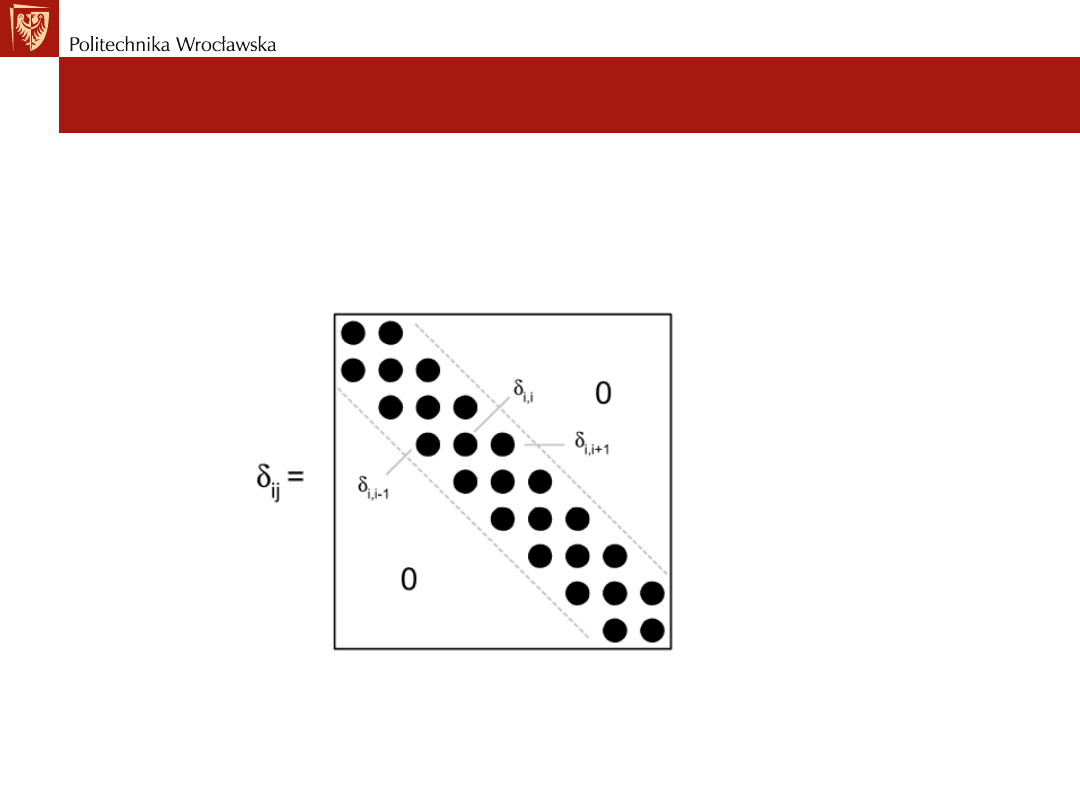
• Odpowiednie współczynniki określone są przez następujące zależności:
• Pozostałe współczynniki sąrówne zero – co widać z wykresów. I-te
równanie kanoniczne metody sił ma postać:
Ustroje statycznie niewyznaczalne. Metoda sił
Belki statycznie niewyznaczalne
• Powyższe równanie jest często nazywane równaniem trzech
momentów. Jeżeli skrajne podpory są przegubowe to w pierwszym i
ostatnim równaniu występują tylko dwie niewiadome. Układ równń
ma charakter pasmowy, co pokazano na poniższym rysunku.
Ustroje statycznie niewyznaczalne. Metoda sił
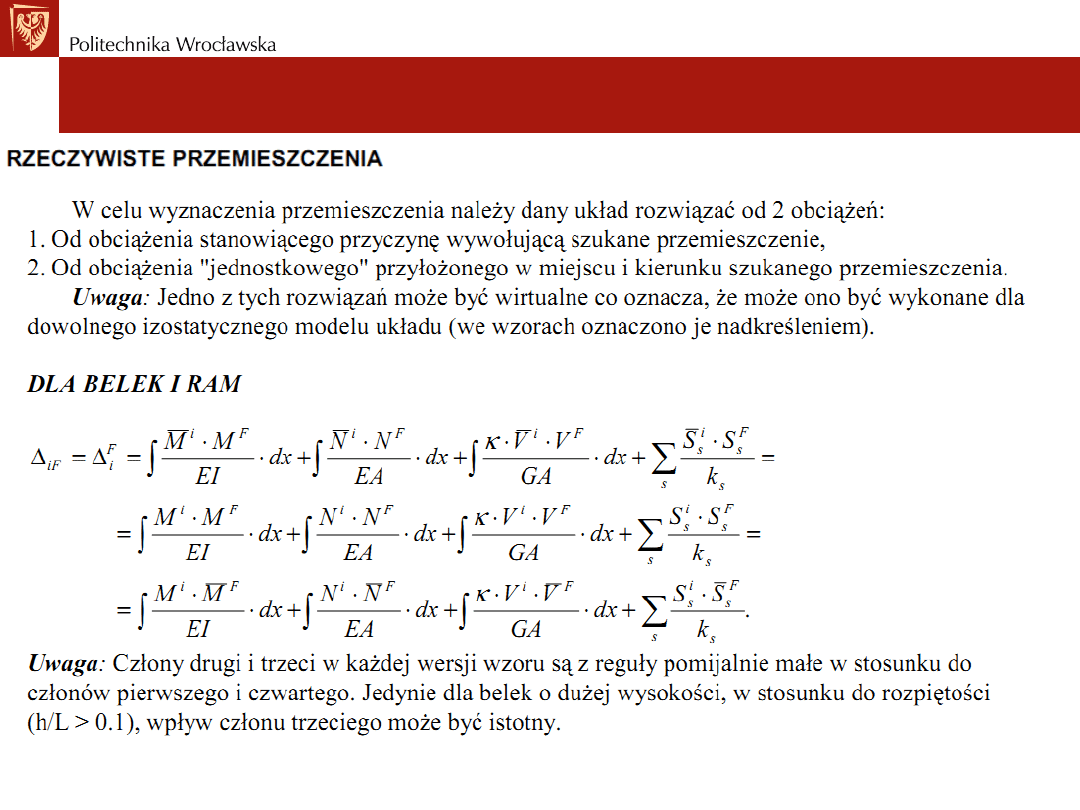
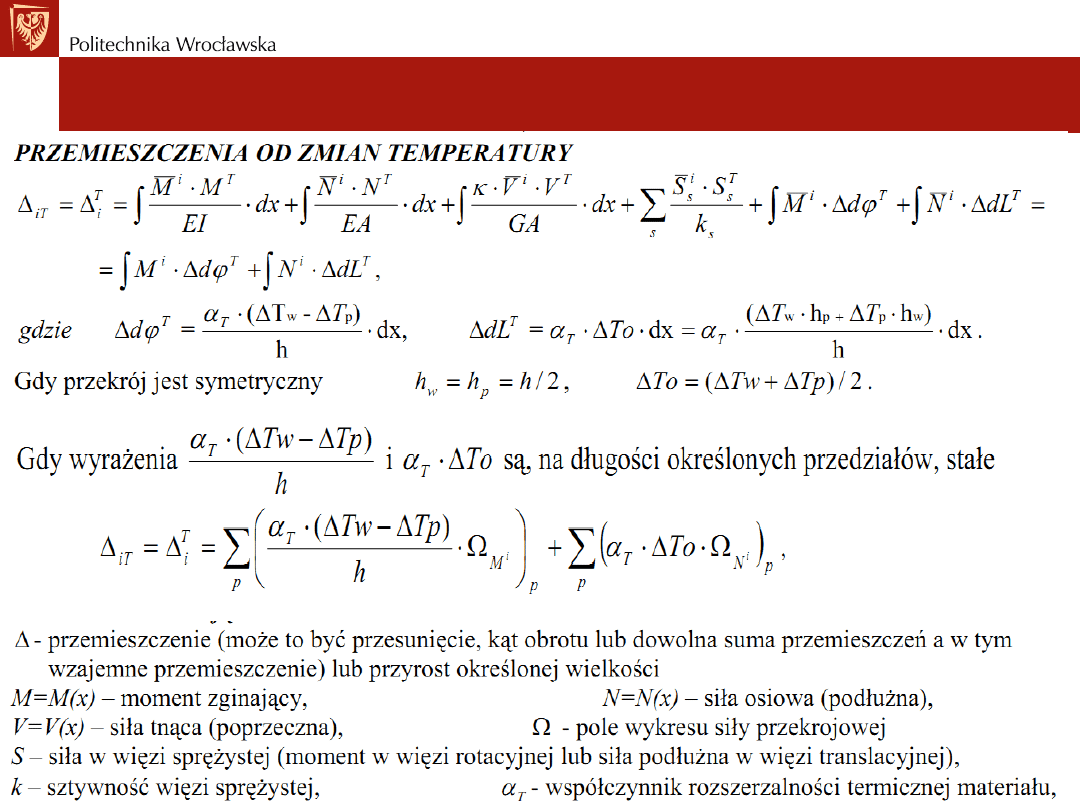
Wyznaczanie przemieszczeń
Wzory do wyznaczania przemieszczeń od obciążeń mechanicznych są
ważne także dla układów SN.
Obciążenie jednostkowe jest obciążeniem wirtualnym, w przypadku układu
statycznie niewyznaczalnego może być ono
przyłożone do układu SW – na
przykład układu podstawowego – zamiast do układu SN!!!
Stan p oznacza obciążenie dane (rzeczywiste) przyłożone w tym przypadku
do układu SN:
Fakt ten nazywany bywa
twierdzeniem redukcyjnym.
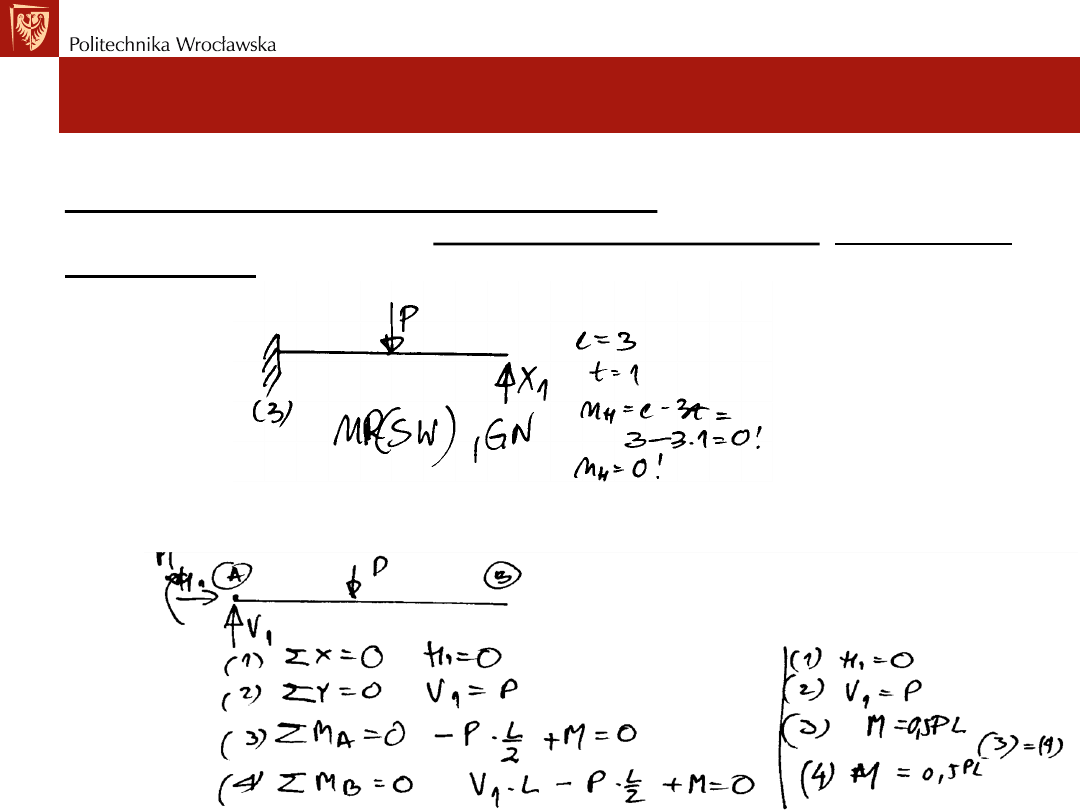
• Interpretację wersji twierdzenia redukcyjnego przedstawimy na
przykładzie belki sztywno zamocowanej na obu końcach.
• Wyznaczymy przemieszczenie pionowe w punkcie „i”. Skorzystamy z
dwóch wariantów twierdzenia redukcyjnego.
Ustroje statycznie niewyznaczalne. Metoda sił
Wyznaczanie przemieszczeń
Pierwsza i druga wersja twierdzenia redukcyjnego
• Interpretację wersji twierdzenia redukcyjnego przedstawimy na
przykładzie belki sztywno zamocowanej na obu końcach. Wyznaczymy
przemieszczenie pionowe w punkcie „i”. Skorzystamy z dwóch wariantów
twierdzenia redukcyjnego.
Ustroje statycznie niewyznaczalne. Metoda sił
Wyznaczanie przemieszczeń
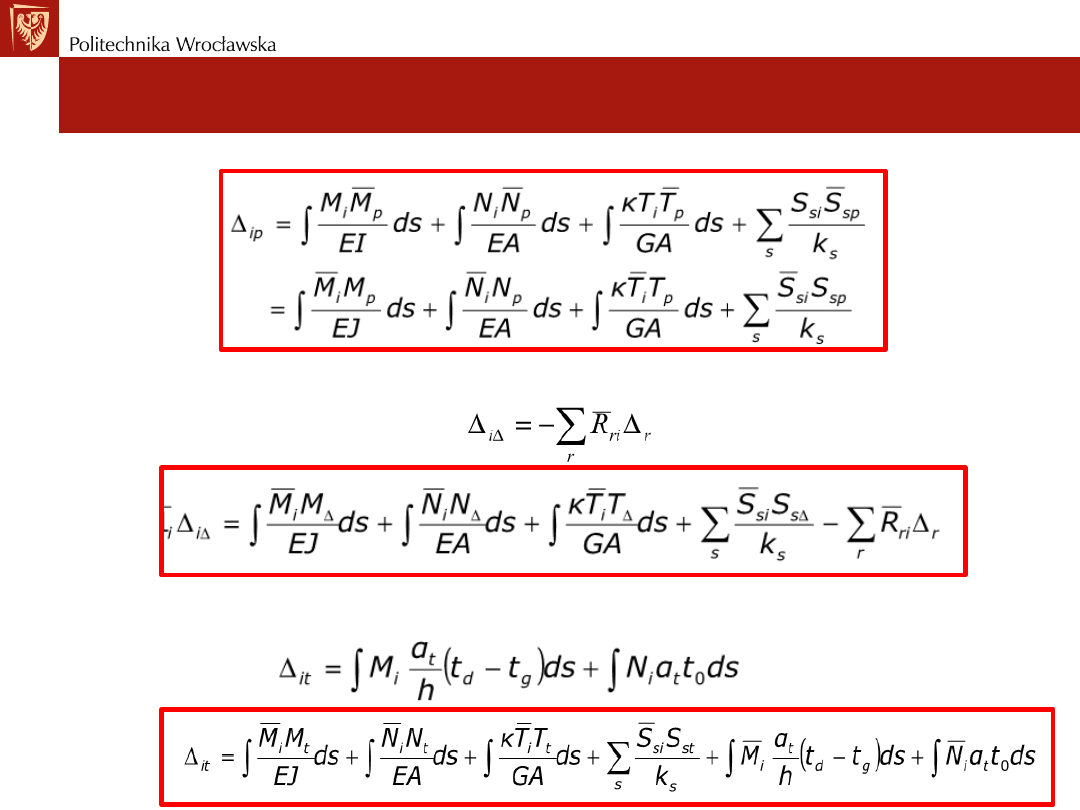
Przemieszczenia w układach SN można określać z zależności podanych
poniżej:
Podsumowanie
Można stwierdzić na podstawie twierdzeń redukcyjnych, że chcąc
wyznaczyć przemieszczenie w układzie statycznie niewyznaczalnym można
wyniki dla jednego ze schematów – dla obciążenia albo dla schematu
wirtualnego – uzyskać w układzie statycznie wyznaczalnym (na przykład w
układzie podstawowym
).
My będziemy posługiwać się schematem w którym wyznaczamy
siły wewnętrzne od obciążenia w URZ (SN), a siły wewnętrzne od
obciążenia na kierunku przemieszczenia w UP (SW).
Ustroje statycznie niewyznaczalne. Metoda sił
Wyznaczanie przemieszczeń
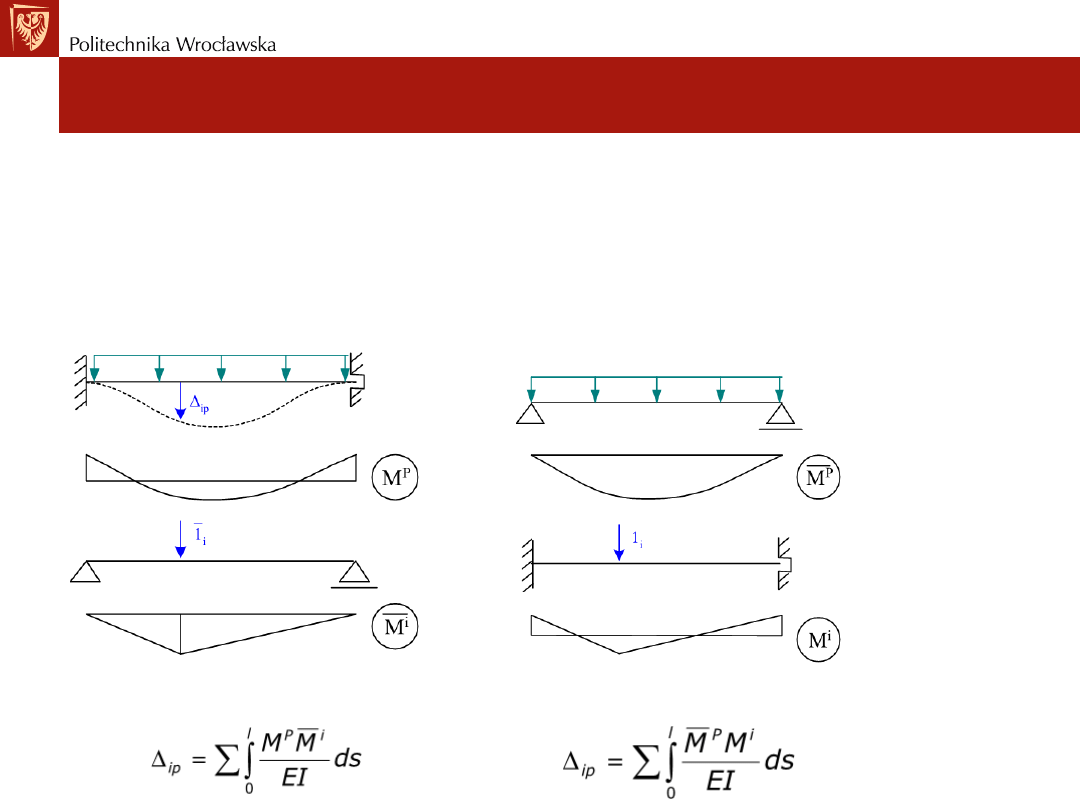
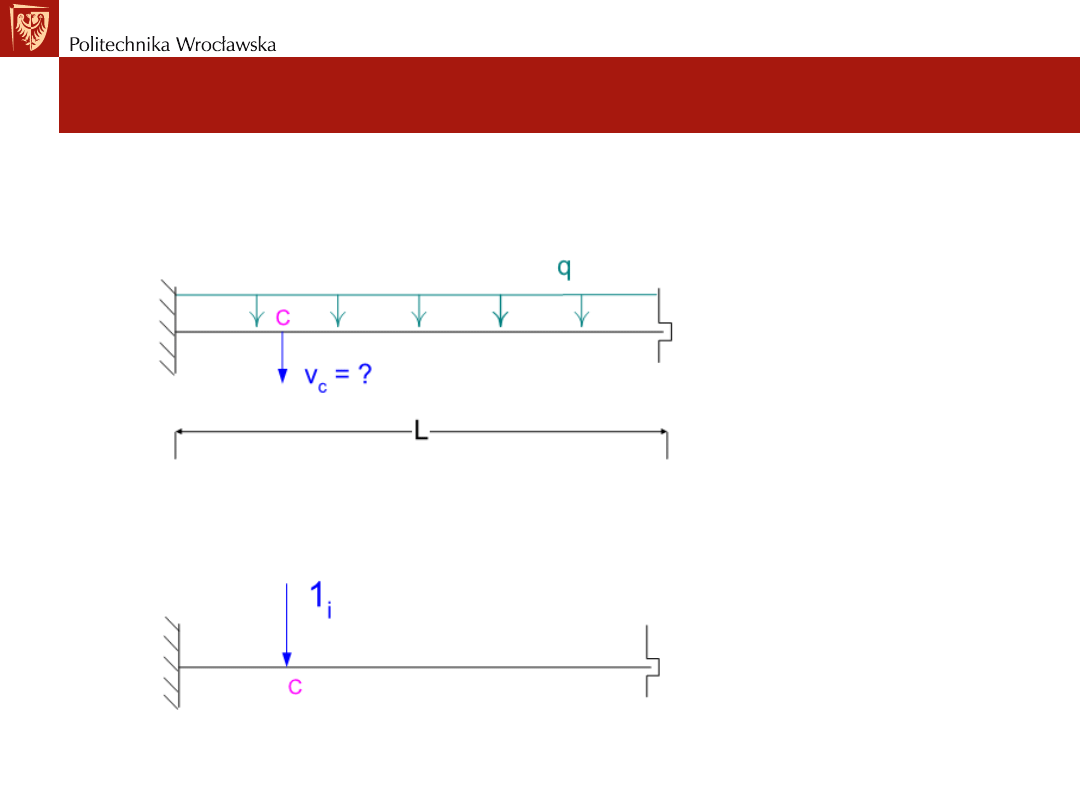
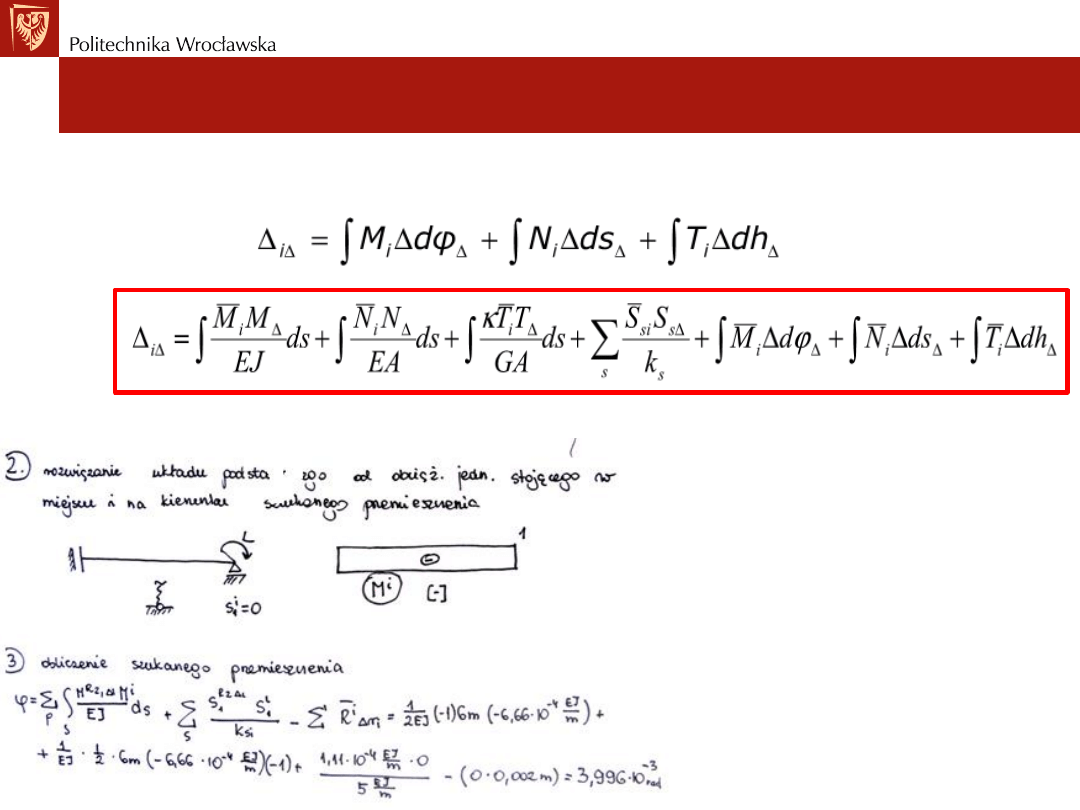
Problem wyznaczenia przemieszczenia w belce statycznie niewyznaczalnej.
Wyznaczamy przemieszczenie pionowe w punkcie „c” od obciążenia
równomiernie rozłożonego.
Aby wyznaczyć przemieszczenie w punkcie „c” przykładamy jednostkowe
obciążenie w tym punkcie.
URZ
UP
Ustroje statycznie niewyznaczalne. Metoda sił
Wyznaczanie przemieszczeń
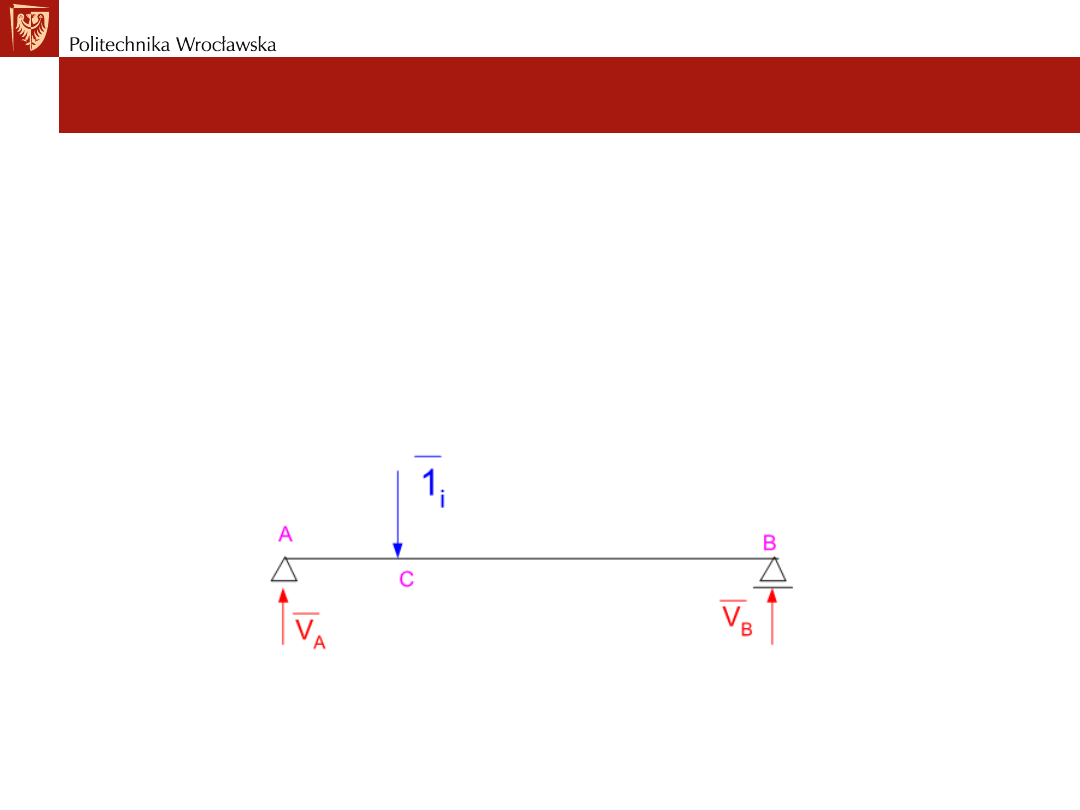
• Zachodzi potrzeba rozwiązania belki statycznie niewyznaczalnej od siły
jednostkowej. Jak wynika z II zasady prac wirtualnych – obciążenie
jednostkowe jest obciążeniem wirtualnym, a więc wystarczy aby spełniało
warunki równowagi.
• Wynika więc, że jako stan jednostkowy wystarczy przyjąć schemat
statyczny wyznaczalny – układ SW(w którym wszystkie wartości
zaznaczamy kreseczką).
• Możliwość przyjęcia stanu jednostkowego przedstawionego powyżej
zamiast przyjęcia schematu SN jest treścią twierdzenia redukcyjnego.
Ustroje statycznie niewyznaczalne. Metoda sił
Wyznaczanie przemieszczeń
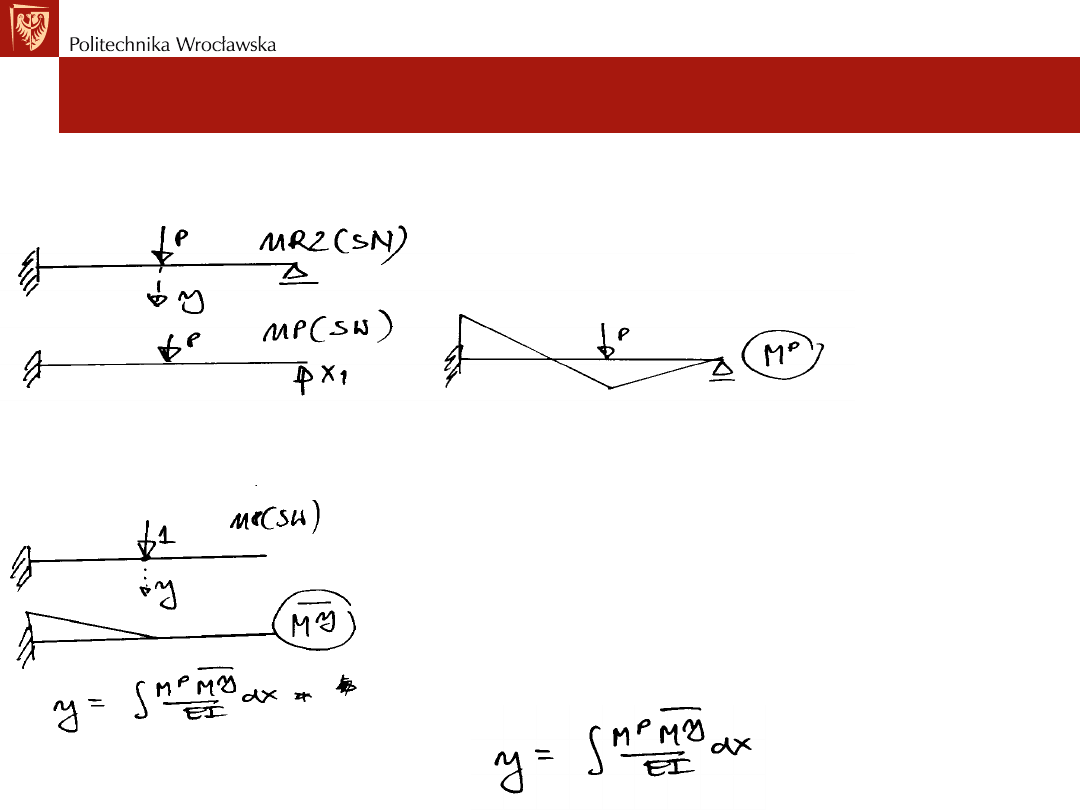
Schemat obliczenia przemieszczeń w układzie SN:
• Wyznaczenie sił wewnętrznych w układzie SN od zadanego obciążenia mech.
• Wyznaczenie sił wewnętrznych w układzie SW od obciążenia jednostkowego
na kierunku szukanego przemieszczenia
• Wyznaczenie przemieszczenia
Ustroje statycznie niewyznaczalne. Metoda sił
Podsumowanie
Ustroje statycznie niewyznaczalne. Metoda sił
Podsumowanie
Ustroje statycznie niewyznaczalne. Metoda sił
Podsumowanie
Ustroje statycznie niewyznaczalne. Metoda sił
Rozwiązanie MS od obciążenia temperaturą
Ze wzorów na wyznaczanie przemieszczeń współczynniki w
kanonicznym układzie równań metody sił określone są wzorami:
• Kreseczka nad
𝑀
𝑖
,
𝑁
𝑖
,
𝑇
𝑖
oraz 𝑆
𝑖
oznacza, że są one wyznaczone w UP
czyli SW.
• W ramach i belkach wpływ T i N jest mały, przyjmujemy EA=∞ oraz
GA=∞, co powoduje pominięcie całek poszczególnych całek.
• Całki z iloczynu momentów zginających należy wyznaczyć za pomocą
wzorów
Simpsona
i Wereszczagina.
• Siła w podporze sprężystej jest równa co do wartości reakcji w tej wiezi
lecz
z przeciwnym znakiem np. Ss=-Vs
.
Ustroje statycznie niewyznaczalne. Metoda sił
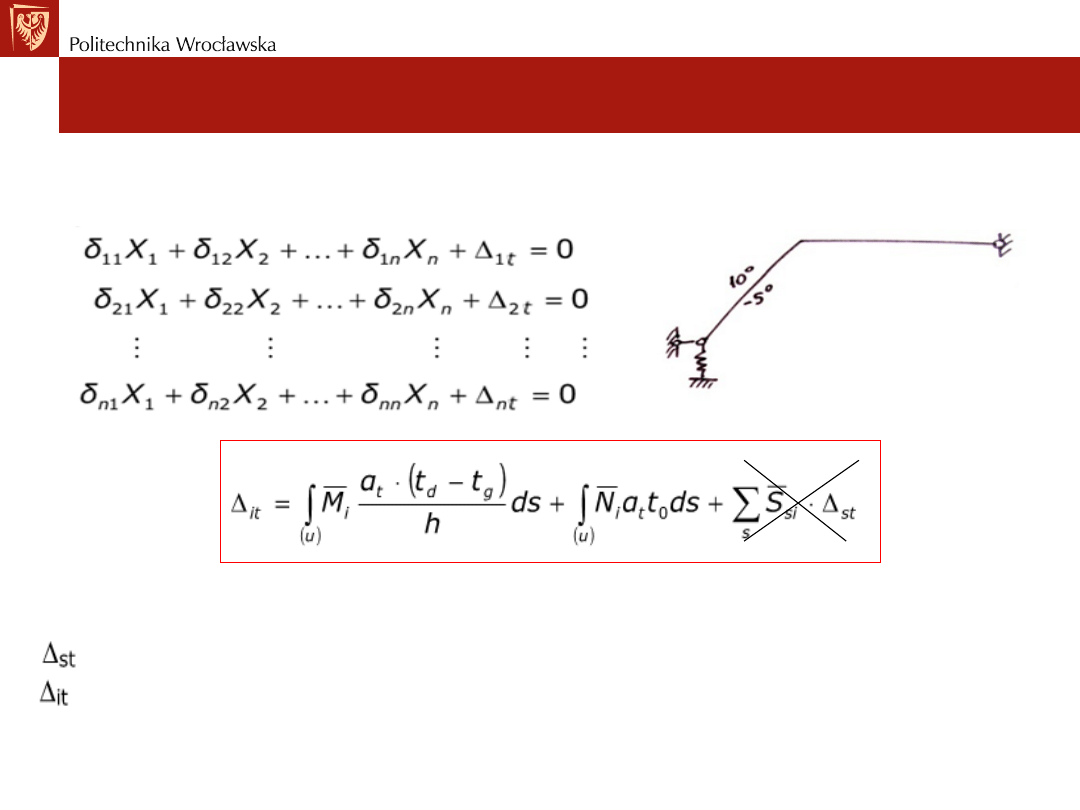
Układ podstawowy i układ równań kanonicznych
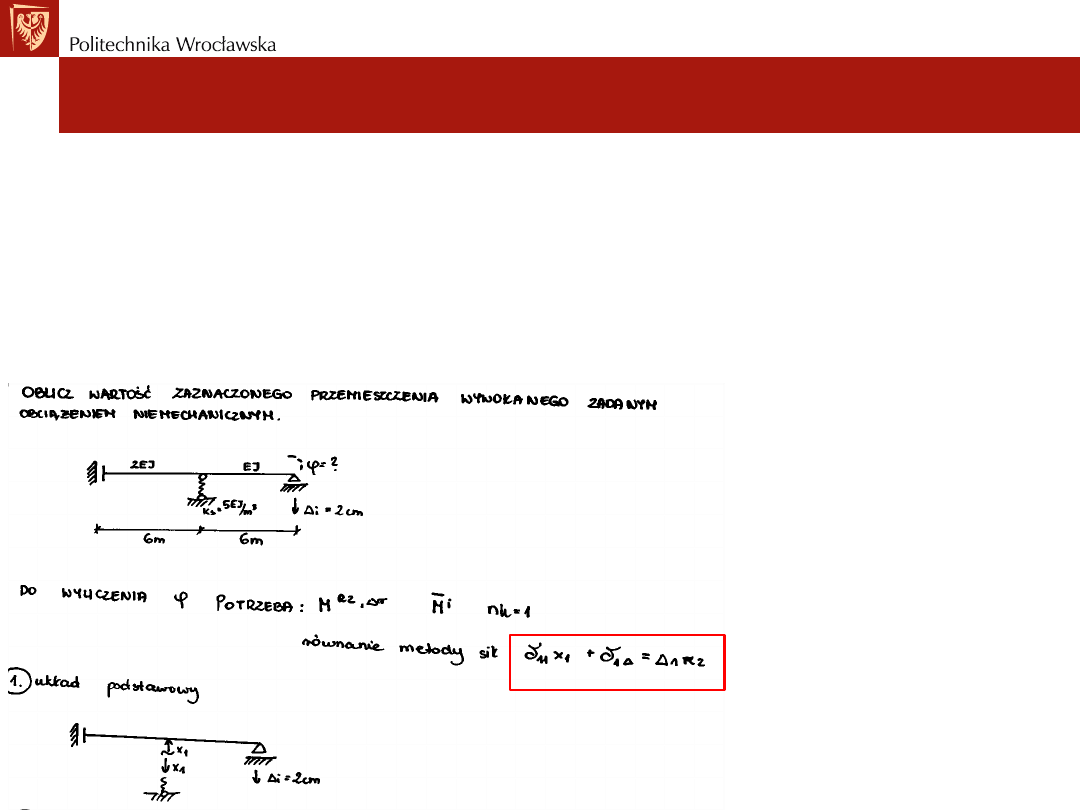
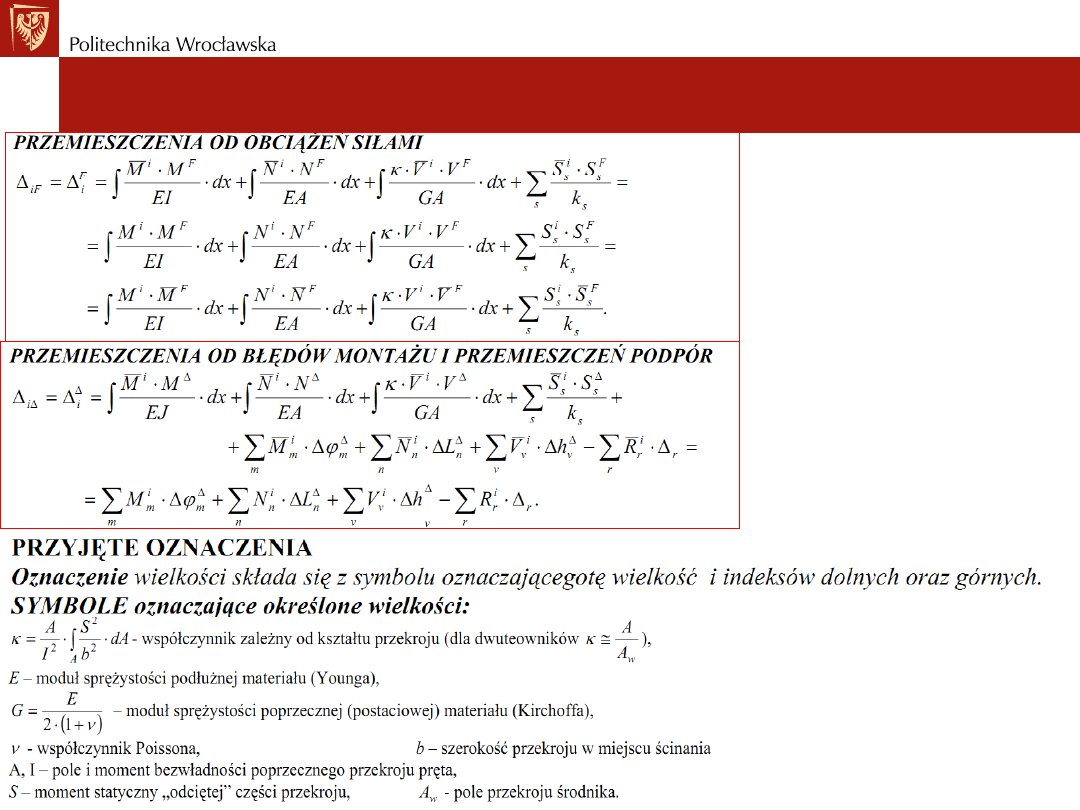
Gdy obciążenie stanowi
zmiana temperatury
, wówczas w miejsce ∆
iP
w
układzie równań podstawiamy ∆
it
określony wzorem:
gdzie:
oznacza odkształcenie sprężyny wywołane zmianą temperatury,
oznacza przemieszczenie w miejscu i kierunku wielkości hiperstatycznej
Xi=1 wywołane zmianą temperatury w układzie podstawowym.
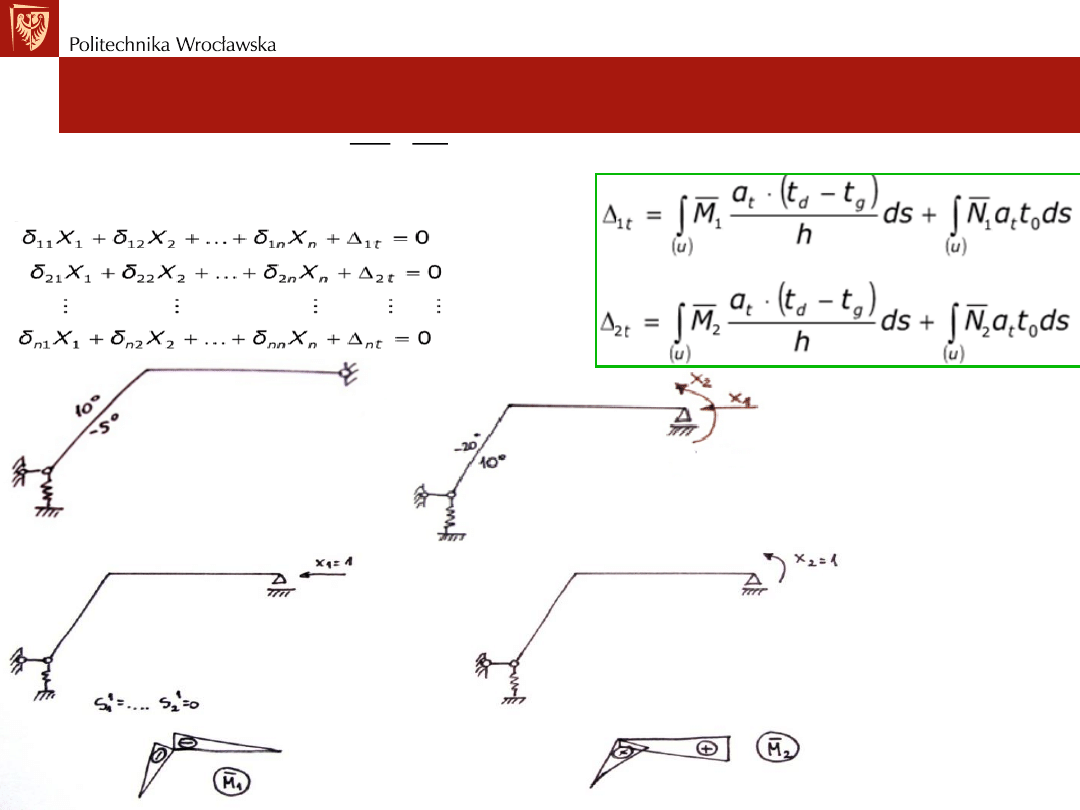
Ustroje statycznie niewyznaczalne. Metoda sił
Układ podstawowy i układ równań kanonicznych
• Poszczególne całki
𝑴
𝒊
,
𝑵
𝒊
,
𝑻
𝒊
należy traktować jako pola
wykresów dla wszystkich prętów.
Ustroje statycznie niewyznaczalne. Metoda sił
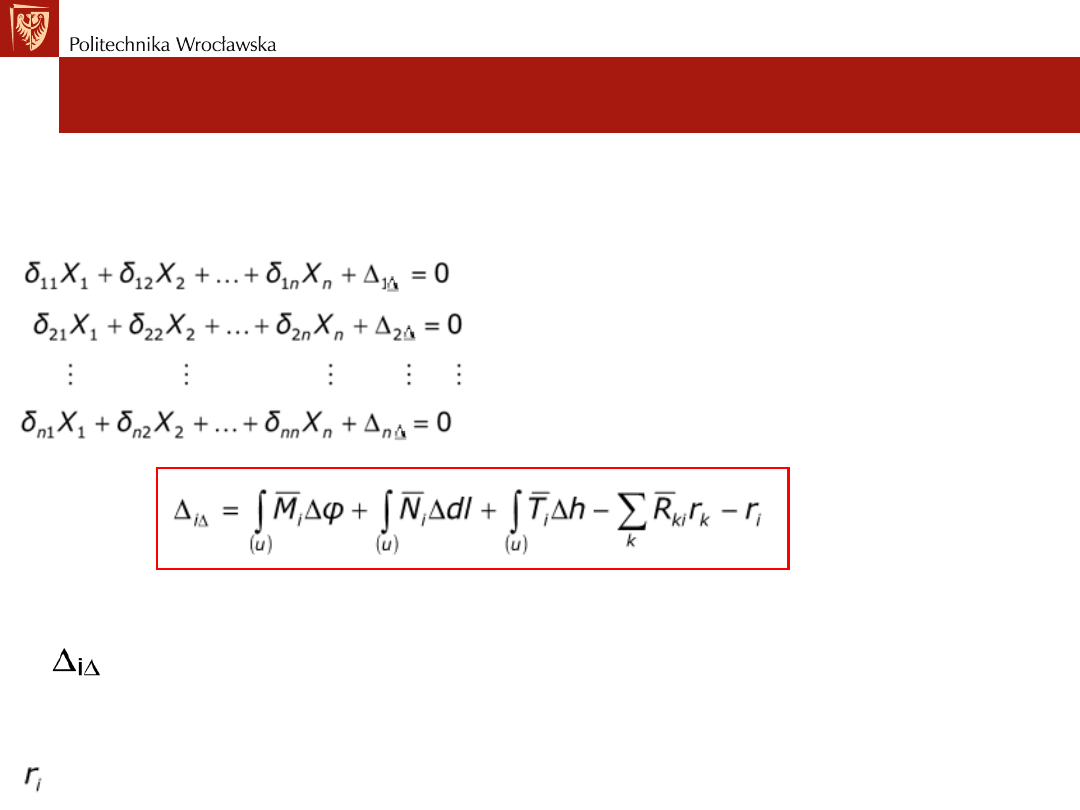
Układ podstawowy i układ równań kanonicznych
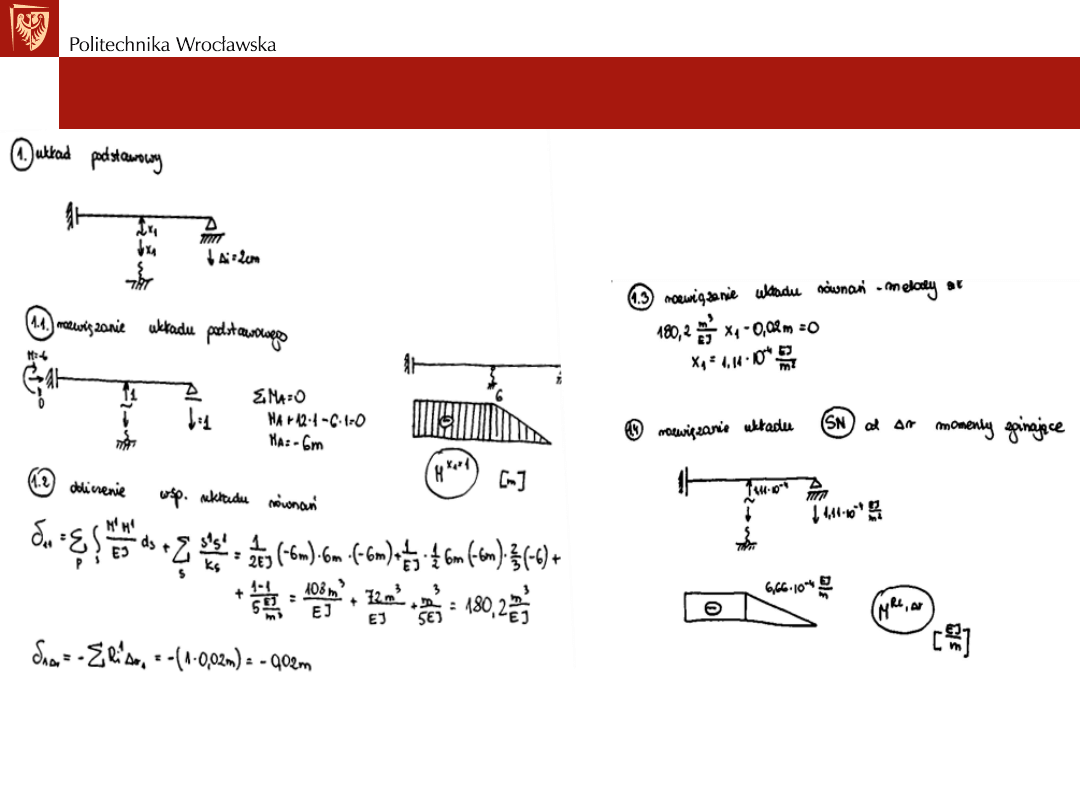
Gdy obciążenie stanowią
osiadania (przemieszczenia) podpór r
k
oraz
imperfekcje ∆φ, ∆l, ∆h (błędy montażu),
wówczas w miejsce ∆
iP
w
układzie równań podstawiamy ∆
i∆
określony wzorem:
gdzie:
oznacza przemieszczenie w miejscu i kierunku wielkości Xi w UP
wywołane błędami montażu i przemieszczeniem podpór w układzie
podstawowym,
oznacza przemieszczenie w URZ w miejscu wielkości hiperstatycznej Xi.
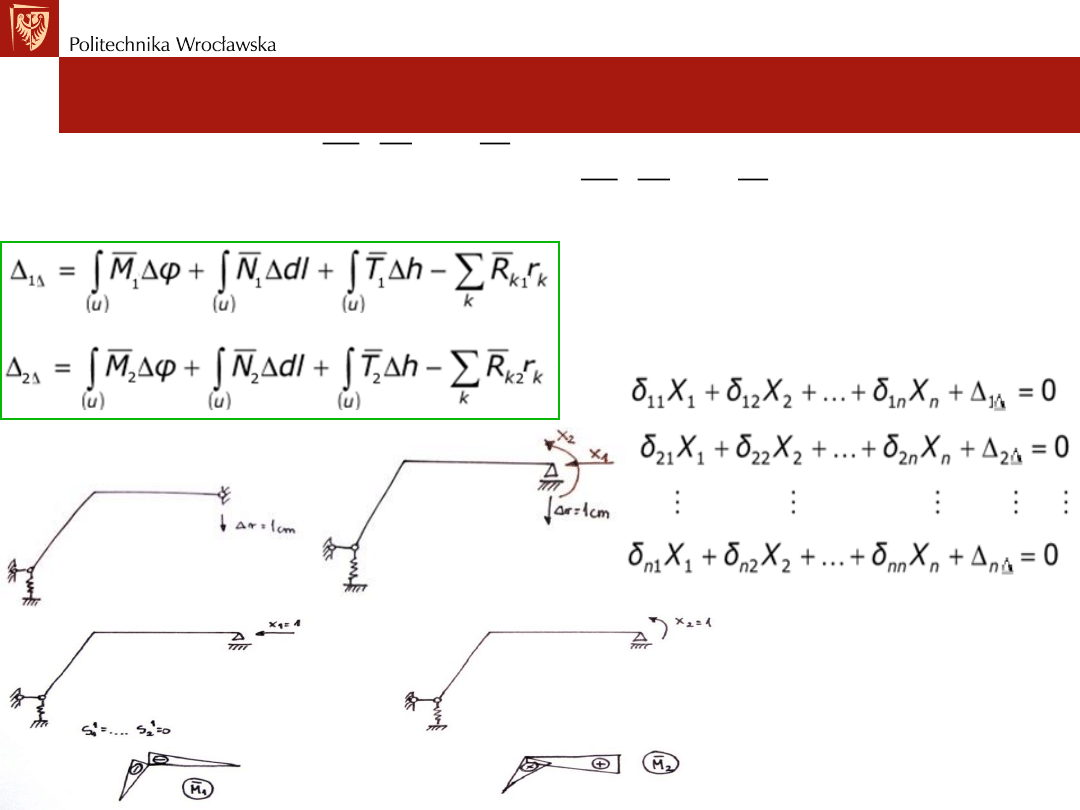
Ustroje statycznie niewyznaczalne. Metoda sił
Układ podstawowy i układ równań kanonicznych
• Poszczególne całki
𝑴
𝒊
,
𝑵
𝒊
,
𝑻
𝒊
,𝑹
𝒊
dla dyskretnych błędów montażu
można traktować jako sumy wartości
𝑴
𝒊
,
𝑵
𝒊
,
𝑻
𝒊
, 𝑹
𝒊
w miejscach
imperfekcji danego typu.
Ustroje statycznie niewyznaczalne. Metoda sił
Układ podstawowy i układ równań kanonicznych
Wnioski:
•
Macierz podatności (współczynników) utworzona na podstawie współczynników równań
kanonicznych jest symetryczna,
•
Równania kanoniczne są nieodłącznym składnikiem układu podstawowego, gdyż zapewniają
kinematyczną zgodność z układem rzeczywistym,
•
Z równań kanonicznych można obliczyć wartości niewiadomych sił uogólnionych Xi.
Przykład obliczeniowy
Ustroje statycznie niewyznaczalne. Metoda sił
Układ podstawowy i układ równań kanonicznych
Po rozwiązaniu układu równań otrzymuje się nadliczbowe wielkości
hiperstatyczne X1, …., Xn, a następnie wyznacza się rzeczywiste (w układzie
SN) sił przekrojowe M, N, T oraz reakcje.
Ustroje statycznie niewyznaczalne. Metoda sił
Kontrola poprawności rozwiązania
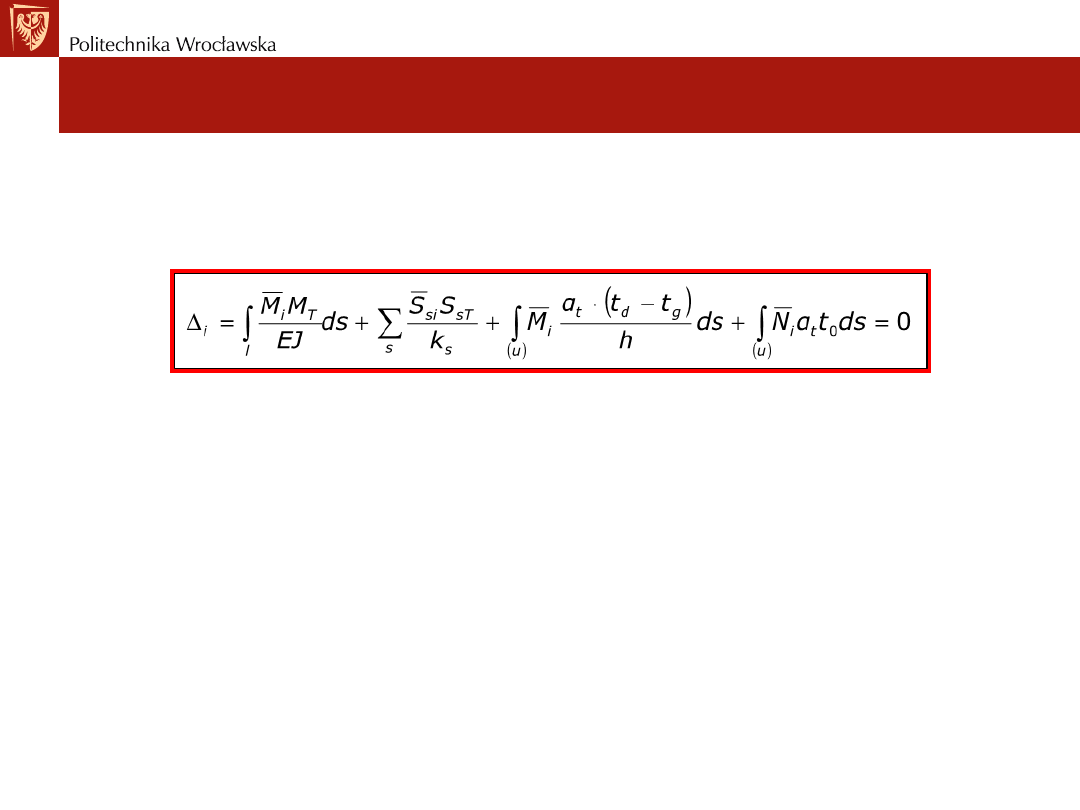
Kontrola poprawności rozwiązania dla obciążenia temperaturą
Odpowiednie siły przekrojowe w układzie rzeczywistym oznaczamy Mp=MT
oraz Ssp=SsT. Poprawne rozwiązanie od obciążenia temperaturą spełnia
równanie:
Ustroje statycznie niewyznaczalne. Metoda sił
Kontrola poprawności rozwiązania
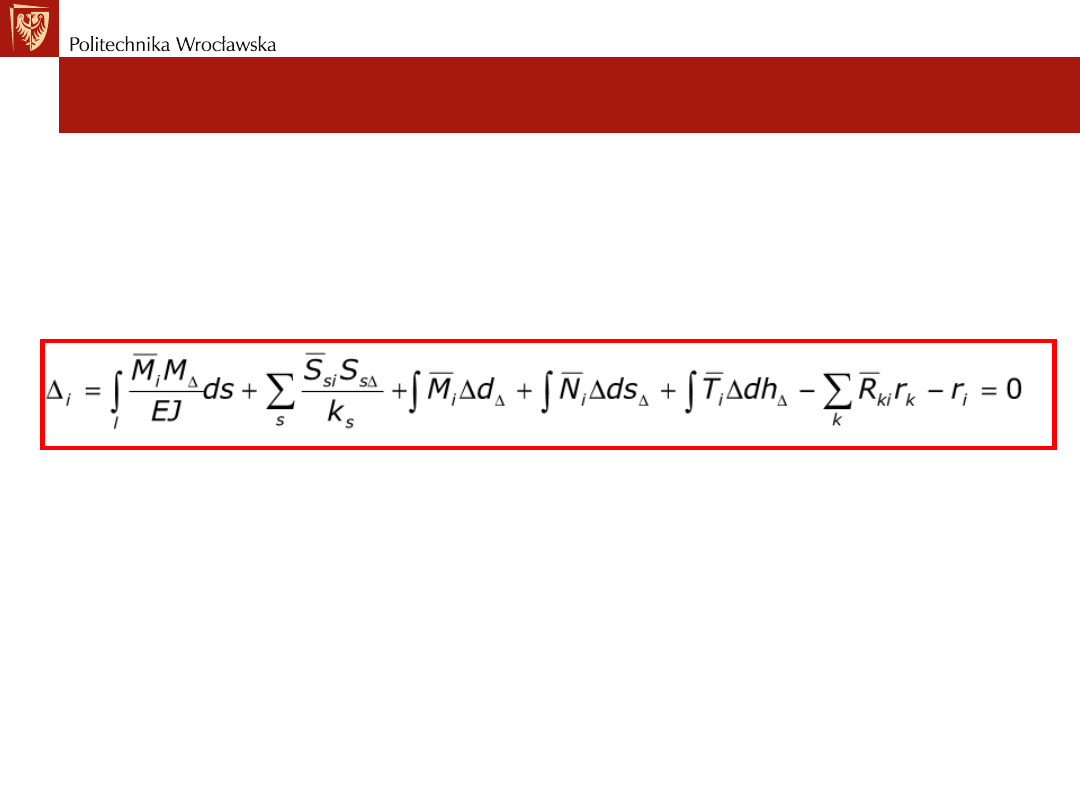
Kontrola poprawności rozwiązania dla obciążenia imperfekacjami i
osiadaniem podpór
Odpowiednie siły przekrojowe w układzie rzeczywistym oznaczamy Mp=M∆
oraz Ssp=Ss∆. Poprawne rozwiązanie od obciążenia imperfekcjami oraz
osiadaniem podpór:
Ustroje statycznie niewyznaczalne. Metoda sił
Wyznaczanie przemieszczeń
Przemieszczenia w układach SN można określać z zależności podanych
poniżej:
W przypadku przemieszczenia wywołanego osiadaniem podpory mamy zależność:
• SW
• SN
W przypadku przemieszczenia wywołanego wpływem temperatury mamy
zależność:
• SW
• SN
Ustroje statycznie niewyznaczalne. Metoda sił
Podsumowanie
W przypadku przemieszczenia wywołanego imperfekcjami geometrycznymi
mamy zależność:
• SW
• SN
Przykład
Wyznaczanie przemieszczeń w układach SW
Podsumowanie
Wyznaczanie przemieszczeń w układach SW
Podsumowanie
Wyznaczanie przemieszczeń w układach SW
Podsumowanie
Wyznaczanie przemieszczeń w układach SW
Podsumowanie
Wyznaczanie przemieszczeń w układach SW
Podsumowanie
Wyszukiwarka
Podobne podstrony:
MB W04 PWr v2
MB W01 PWr
MB W01 PWr
MB W00 PWr
MB W02 PWr
MB W03 PWr v2
MB W02 PWr
MB W03 PWr
MB W06 PWr
MB W01 PWr
RBD W04
W04 2
W04 3
więcej podobnych podstron