Badania operacyjne
dr inż. W. Zalewski
41
PROGRAMOWANIE DYNAMICZNE
Metody programowania dynamicznego polegają na zmianie zadań
optymalizacyjnych z N zmiennymi decyzyjnymi w N zadań z jedną
zmienną decyzyjna, przy czym zadania te są powiązane ze sobą określoną
zależnością rekurencyjną. Operacja taka jest możliwa tylko w przypadku,
gdy funkcja celu jest funkcją separowalną (daje się wyrazić jako
kompozycja funkcji jednej zmiennej).
Programowanie dynamiczne jest pewnym podejściem do
optymalizacji wieloetapowych procesów decyzyjnych.
Rozpatrzmy dowolny proces, którego przebieg można podzielić na
N etapów. W dowolnym etapie tego procesu możemy wyróżnić
następujące elementy:
⇒
stan wejściowy procesu do danego etapu – jest to stan jaki osiągnął
proces w wyniku realizacji etapu poprzedniego;
⇒
decyzję podejmowaną na danym etapie;
⇒
stan wyjściowy procesu z danego etapu – stan ten zależy od stanu
wejściowego oraz podjętej decyzji na danym etapie.
Stan
procesu
można opisać za pomocą jednego lub kilku parametrów
zwanych zmiennymi stanu. W dalszym ciągu będziemy rozpatrywać
procesy decyzyjne z jedną zmienną stanu s. Decyzje podejmowane
w kolejnych etapach będziemy opisywać za pomocą zmiennych
decyzyjnych x
1
, x
2
, ..., x
n
.
Badania operacyjne
dr inż. W. Zalewski
42
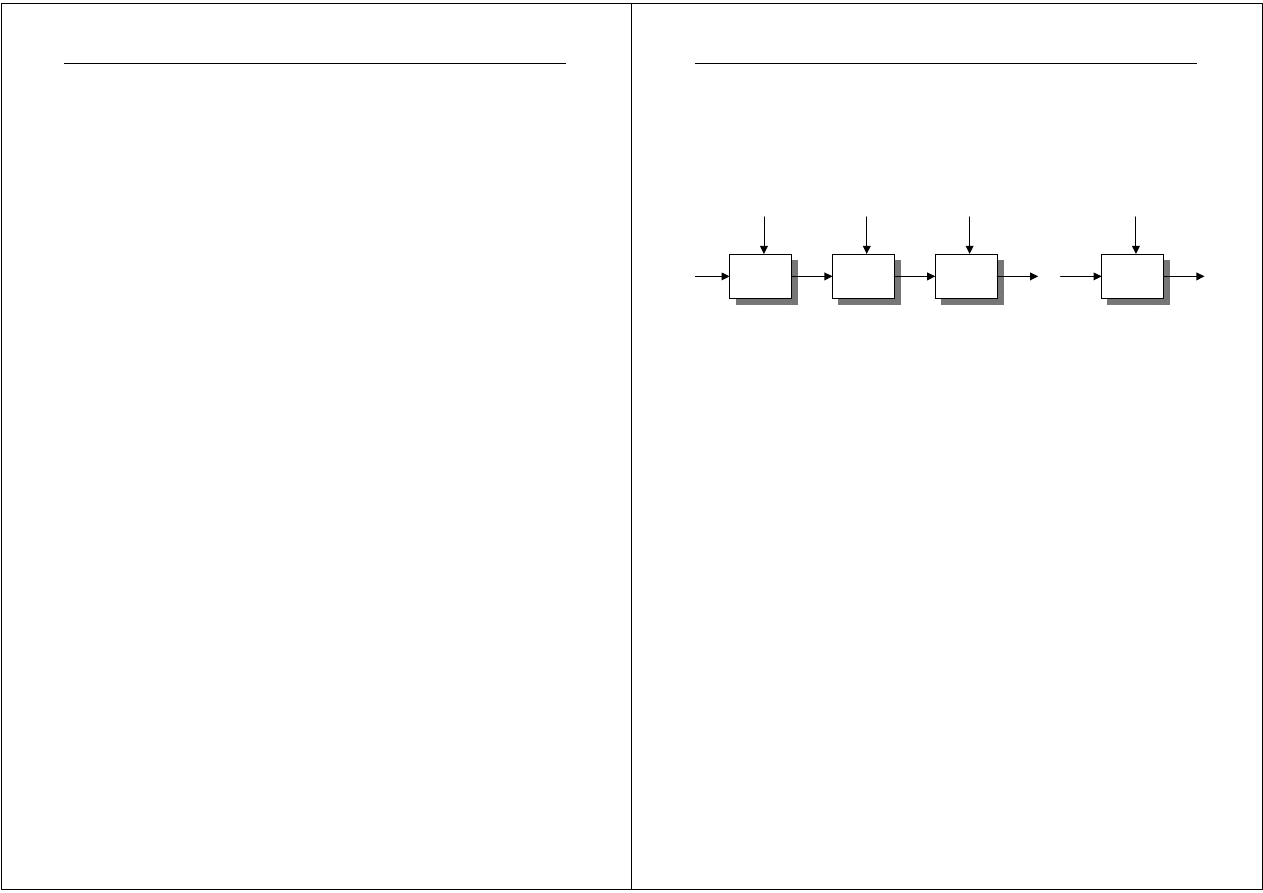
Ogólny schemat wieloetapowego procesu decyzyjnego przedstawia
rysunek poniżej.
W procedurze programowania dynamicznego wykorzystujemy dwie
własności, które umożliwiają podejmowanie decyzji w procesie
n-etapowym:
⇒
Wartość funkcji celu w zadaniu n-etapowym jest sumą wartości
uzyskanych w poszczególnych etapach, a wartość uzyskana w j-tym
etapie zależy od stanu w etapie poprzednim oraz od decyzji podjętej
w j-tym etapie. Nie zależy natomiast od tego, jaką drogą system doszedł
do stanu j-1. (Własność Markowa).
⇒
Aby ciąg decyzji (x
1
*
, x
2
*
, ..., x
N
*
) był optymalną strategią w procesie
N-etapowym. potrzeba, by ciąg decyzji (x
2
*
, x
3
*
, ..., x
N
*
) był optymalną
strategią w procesie (N-1)-etapowym wynikającym z podjęcia
w pierwszym etapie decyzji x
1
*
.
x
1
x
2
x
3
x
N
s
0
s
1
s
2
s
3
s
N-1
s
N
HACKED BY VIPER :)

Badania operacyjne
dr inż. W. Zalewski
43
Ogólny schemat programowania dynamicznego
Rozważmy N-etapowy dyskretny proces decyzyjny dla i = 1, 2, ..., N-1, N.
Oznaczmy:
s
0
– zadany stan początkowy procesu,
s
1
, s
2
, ..., s
N
– stany dla poszczególnych etapów,
x
1
, x
2
, ..., x
N
– decyzje w poszczególnych etapach,
Z
1
(s
0
, x
1
) –
wartość funkcji celu uzyskana w pierwszym etapie przy
zadanym stanie początkowym;
analogicznie:
Z
2
(s
1
, x
2
), Z
3
(s
2
, x
3
), ..., Z
N-1
(s
N-2
, x
N-1
), Z
N
(s
N-1
, x
N
) – wartości funkcji
w kolejnych etapach 2, 3, ..., N.
Zachodzi
również:
Z(s
0
, X) = Z
1
(s
0
, x
1
) + Z
2
(s
1
, x
2
) + Z
3
(s
2
, x
3
) + ... + Z
N-1
(s
N-2
, x
N-1
) +
+
Z
N
(s
N-1
, x
N
)
Należy wyznaczyć optymalną strategię (ciąg decyzji): X
*
= (x
1
*
, x
2
*
,
..., x
N
*
) taką, aby uzyskać max(min) Z(s
0
, X) przy ograniczeniach X
⊂
Ω
,
gdzie
Ω
oznacza obszar określenia zadania wyjściowego.
Aby
rozwiązać to zadanie dokonuje się dekompozycji, otrzymując
rodzinę zadań, tzn.
Ω
N
,
Ω
N-1,N
, ...,
Ω
1, 2, ..., N
≡
Ω
.
Niech
F
1
(s
N-1
) oznacza warunkowo optymalną wartość funkcji celu
w pierwszym etapie, tj.:
( )
( ) (
)
N
1
N
N
x
1
N
1
x
,
s
Z
min
max
s
F
N
N
−
Ω
∈
−
=
Badania operacyjne
dr inż. W. Zalewski
44
Oznaczając przez F
2
(s
N-2
), F
3
(s
N-3
), ..., F
K
(s
N-K
), ..., F
N
(s
0
) warunkowo
optymalne wartości funkcji celu w kolejnych etapach aż do N-tego,
otrzymamy:
F
2
(s
N-2
) = max(min) [Z
N-1
(s
N-2
, x
N-1
) + Z
N
(s
N-1
, x
N
)] =
= max(min)[Z
N-1
(s
N-2
, x
N-1
) + F
1
(s
N-1
)
Analogicznie:
(
)
( )
(
)
( )
[
]
1
N
1
1
N
2
N
1
N
x
2
N
2
s
F
x
,
s
Z
min
max
s
F
N
,
1
N
1
N
−
−
−
−
Ω
∈
−
+
=
−
−
( )
( )
(
) ( )
[
]
2
N
2
2
N
3
N
2
N
x
3
N
3
s
F
x
,
s
Z
min
max
s
F
N
,
1
N
,
2
N
2
N
−
−
−
−
Ω
∈
−
+
=
−
−
−
..............................................................................
dla k-tego etapu:
( )
( )
( )
( )
(
)
( )
(
)
[
]
1
k
N
1
k
1
k
N
k
N
1
k
N
k
N
k
s
F
x
,
s
Z
min
max
s
F
+
−
−
+
−
−
+
−
−
+
=
dla N-tego etapu:
( )
( ) (
)
( )
[
]
1
1
N
1
0
1
x
0
N
s
F
x
,
s
Z
min
max
s
F
1
−
Ω
∈
+
=
Z
równań powyższych wynika, że maksymalna wartość funkcji
z N-etapowego procesu decyzyjnego jest równa maksimum ze względu na
pierwszą decyzję, przy założeniu stanu początkowego oraz maksymalnej
wartości funkcji dla procesu (N-1)-etapowego.
Powyższy ciąg równań funkcyjnych wyraża zasadę optymalności,
która umożliwia uzyskanie najpierw warunkowo optymalnego rozwiązania
dla N-tego etapu, następnie dla N-1, N-2, ..., aż do etapu pierwszego.
HACKED BY VIPER :)

Badania operacyjne
dr inż. W. Zalewski
45
ANALIZA SIECIOWA
Model sieciowy przedsięwzięcia
Przedsięwzięcie – wyodrębniony zbiór czynności powiązanych ze
sobą sposobem wykonania (technologią).
Technologię nazywamy strukturą, a odwzorowanie przedsięwzięcia
projektem, który przedstawiamy w postaci sieci czynności.
Definicja 1.
Sieć czynności to graf spójny antycykliczny, który ma jeden
wierzchołek początkowy i jeden wierzchołek końcowy. Łuki sieci
reprezentują czynności, wierzchołki zdarzenia w projekcie.
Konstrukcja sieci czynności
W
trakcie
wykreślania powinny być przestrzegane zasady:
! zdarzenie początkowe nie ma czynności poprzedzających,
! zdarzenie końcowe nie ma czynności następujących,
! dwa kolejne zdarzenia mogą być połączone tylko jedną czynnością,
!
wszystkie zdarzenia w sieci, z wyjątkiem początkowego lub
końcowego, powinny być początkiem i końcem co najmniej jednej
czynności.
Można wyróżnić następujące etapy konstruowania sieci:
! ustalenie listy czynności,
! ustalenie zdarzenia początkowego i końcowego,
! określenie kolejności wykonywania czynności,
! numerowanie wierzchołków.
Badania operacyjne
dr inż. W. Zalewski
46
Analiza sieci z funkcją czasu
Definicja 2.
Czasem realizacji projektu określonym przez czas trwania czynności
będziemy nazywali czas t*:
( )
k
S
s
*
s
t
max
t
k
∈
=
Definicja 3.
Ścieżką krytyczną w sieci czynności (critical path method – CPM)
nazywamy ścieżkę pełną , dla której czas trwania jest najdłuższy.
Definicja 4.
Najwcześniejszy możliwy termin zaistnienia zdarzenia określony jest
następującym wzorem:
{
}
ij
0
i
i
0
j
t
t
max
t
+
=
, i < j
gdzie t
i
0
oznacza najwcześniejszy możliwy termin wystąpienia i-tego
zdarzenia bezpośrednio poprzedzającego wydarzenie j-te.
Definicja 5.
Najpóźniejszy dopuszczalny termin zaistnienia zdarzenia i-tego, t
i
1
określony jest wzorem:
{
}
ij
1
j
j
1
i
t
t
min
t
−
=
,
i < j
gdzie t
j
1
oznacza najpóźniejszy dopuszczalny termin zaistnienia j-tego
zdarzenia, następującego po i-tym zdarzeniu.
Najwcześniejszy i najpóźniejszy termin zdarzenia końcowego są
sobie równe (zdarzenie to nie ma następnika).
HACKED BY VIPER :)

Badania operacyjne
dr inż. W. Zalewski
47
Definicja 6.
Luz
czasowy
L
i
dowolnego zdarzenia i-tego określamy jako:
0
i
1
i
i
t
t
L
−
=
.
Wskazuje on, o ile może opóźnić się termin zaistnienia zdarzenia bez
wpływu na termin zakończenia realizacji projektu.
Charakterystyki czasowe czynności
Dla
każdej czynności <i, j> wyróżnia się cztery terminy związane
z czasem realizacji.
Definicja 7.
Najwcześniejszy możliwy termin rozpoczęcia czynności <i, j>
wyznacza najwcześniejszy możliwy termin zajścia zdarzenia
początkowego tej czynności.
Definicja 8.
Najpóźniejszy dopuszczalny termin rozpoczęcia czynności określony
jest przez różnicę t
j
1
– t
ij
.
Definicja 9.
Najwcześniejszy możliwy termin zakończenia czynności <i, j>
wyrażony jest przez sumę t
i
0
+ t
ij
.
Definicja 10.
Najpóźniejszy dopuszczalny termin zakończenia czynności <i, j>
określa najpóźniejszy termin zajścia zdarzenia końcowego tej czynności.
Badania operacyjne
dr inż. W. Zalewski
48
Dla
każdej czynności można wyznaczyć rezerwy czasu wykonania,
zwane zapasami czasu.
Wyróżnia się cztery rodzaje zapasów:
! zapas całkowity,
! zapas swobodny,
! zapas warunkowy,
! zapas niezależny.
Definicja 11.
Zapas
całkowity Z
c
określony jest przez równanie:
Z
c
= t
j
1
– t
i
0
– t
ij
.
Stanowi on rezerwę czasu, który może być wykorzystany dodatkowo na
wykonanie czynności bez wpływu na termin realizacji projektu.
Definicja 12.
Zapas swobodny Z
s
określony jest przez równanie:
Z
s
= t
j
0
– t
i
0
– t
ij
.
Nie wpływa na zapasy związane z czynnościami należącymi do danej
ścieżki.
Definicja 13.
Zapas
warunkowy
Z
w
określony jest przez równanie:
Z
w
= t
j
1
– t
i
1
– t
ij
.
Rezerwa czasu może być wykorzystana bez zmniejszenia zapasów
poprzednich, określonych dla danej ścieżki.
Definicja 14.
Zapas
niezależny Z
n
określony jest przez równanie:
Z
n
= t
j
0
– t
i
1
– t
ij
.
Wykorzystanie tej rezerwy nie ma wpływu na zapas jakiejkolwiek innej
czynności.
HACKED BY VIPER :)
Wyszukiwarka
Podobne podstrony:
podrecznik 2 18 03 05
regul praw stan wyjątk 05
05 Badanie diagnostyczneid 5649 ppt
Podstawy zarządzania wykład rozdział 05
05 Odwzorowanie podstawowych obiektów rysunkowych
05 Instrukcje warunkoweid 5533 ppt
05 K5Z7
05 GEOLOGIA jezior iatr morza
05 IG 4id 5703 ppt
05 xml domid 5979 ppt
Świecie 14 05 2005
Wykł 05 Ruch drgający
TD 05
6 Zagrozenia biosfery 07 05 05
05 DFC 4 1 Sequence and Interation of Key QMS Processes Rev 3 1 03
więcej podobnych podstron