Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
AKADEMIA MORSKA W SZCZECINIE
JEDNOSTKA ORGANIZACYJNA:
ZAKŁAD KOMUNIKACYJNYCH TECHNOLOGII MORSKICH
INSTRUKCJA
ELEKTROTECHNIKA I ELEKTRONIKA
Laboratorium
Ćwiczenie nr 6: Modulacja i detekcja
Opracował:
dr inż. Marcin Mąka, dr inż. Piotr Majzner
Zatwierdził:
dr inż. Piotr Majzner
Obowiązuje od: 24. IX 2012

Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
1
Spis treści
6.1. Cel i zakres ćwiczenia
6.2. Opis stanowiska laboratoryjnego
6.3. Przebieg ćwiczenia
6.4. Warunki zaliczenia
6.5. Część teoretyczna
6.6. Literatura
6.7. Efekty kształcenia
6.8. Szablon sprawozdania

Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
2
6. MODULACJA I DETEKCJA
6.1.
Cel i zakres ćwiczenia
Celem ćwiczenia jest opanowanie wiedzy dotyczącej modulacji analogowy, demodulacji i przemiany
częstotliwości.
Zagadnienia
1.
Parametry i widmo podstawowych sygnałów elektrycznych.
2.
Rodzaje modulacji analogowych.
3.
Modulacja amplitudowa.
4.
Modulacja fazy.
5.
Modulacja częstotliwościowa.
6.
Demodulacja amplitudowa.
7.
Demodulacja częstotliwościowa.
8.
Przemiana częstotliwości.
Pytania kontrolne
1.
Co to jest modulacja i kiedy się ją stosuje?
2.
Jakie są rodzaje modulacji ?
3.
Omówić modulację amplitudową.
4.
Omówić widmo częstotliwościowe sygnału zmodulowanego amplitudowo.
5.
Co to jest głębokość modulacji ?
6.
Omówić modulację częstotliwości i fazy.
7.
Jakie są różnicy pomiędzy modulacją częstotliwościową a fazową ?
8.
Jakie są podstawowe różnice pomiędzy poszczególnymi rodzajami modulacji ?
9.
Omówić ideę działania podstawowych układów modulacyjnych.
10. Co to jest detekcja ?
11. Omówić ideę działania liniowego detektora diodowego.
12. Omówić ideę działania najprostszego układu demodulacji częstotliwości.
6.2. Opis programu
Program symulacji modulacji amplitudy i częstotliwości uruchamia się wpisując nazwę programu
„modul” potwierdzony przyciskiem „Enter”. Na ekranie komputera wyświetlona będzie strona
tytułowa, aby przejść do następnej części programu należy nacisnąć dowolny klawisz, po czym
pojawia się ekran główny programu. Na ekranie głównym znajdują się okna, w których rysowane są
sygnały dotyczące modulacji. Pojawia się menu:
F1 Przebieg
F2 Dane
Esc Koniec
Naciśniecie klawisz „Esc” spowoduje wyjście z programu. Naciśniecie klawisza „F1” spowoduje
uruchomienie symulacji i wykreślenie odpowiednich sygnałów Naciśniecie klawisza „F2” spowoduje
przejście do podglądania i poprawiania danych stosowanych w procesie modulacji. Każda zmienna
jest opisana i podana jest jej jednostka. Ponieważ w komputerze trudno zapisać wykładnik liczby 10
stąd zastosowano zapis zmiennoprzecinkowy. tzn.
4
04
e
oznacza to samo co 4
10
4
= 40000
Jeżeli chcemy na przykład zmienić amplitudę sygnału nośnego U
n
należy przycisnąć „F4”.
Pojawi się nowe okno w którym należy wpisać nowa wartość, potwierdzoną przyciskiem „Enter”.

Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
3
Zmieniona dana jest ponownie wyświetlona razem z pozostałymi Dane napisane kolorem żółtym
zmienia się jako jedną z możliwych Na przykład jeżeli chcemy zmienić kształt sygnału modulującego
wciskamy „F10” a następnie kursorem wybieramy odpowiedni kształt sygnału modulującego i
wciskamy „Enter”. Nowy wybrany kształt sygnału modulującego jest wyświetlany razem z
pozostałymi danymi. Jeżeli proces podglądania i poprawiania danych chcemy zakończyć należy
wcisnąć „Esc”. Proces symulacji będzie uruchamiany już z nowymi danymi.
W czasie symulacji modulacja amplitudy realizowana jest według wzoru:
t)
(
x(t)
m
U
U(t)
n
n
sin
gdzie:
U(t) - sygnał zmodulowany,
U
n
- amplituda sygnału nośnego,
x(t)
- sygnał modulujący,
n
- pulsacja sygnału nośnego.
Modulacja fazy realizowana jest według wzoru:
x(t)
d
t
U
U(t)
ff
n
n
sin
gdzie:
d
ff
- współczynnik dewiacji fazy.
Modulacja częstotliwości realizowana jest według wzoru:
t
fc
n
n
x(t)dt
d
t
U
U(t)
0
sin
gdzie:
d
fc
- współczynnik dewiacji częstotliwości.
Kształt sygnału modulującego może być następujący:
1 sinusoida:
x(t)=U
s
sin(
s
t+a)
2 sinusoidy:
x(t)=U
s
sin(
s
t+a)+ U
s2
sin(
s2
t+a
2
)
3 sinusoidy:
x(t)=U
s
sin(
s
t+a)+ U
s2
sin(
s2
t+a
2
)+U
s3
sin(
s3
t+a
3
)
sygnał prostokątny:
2
t
2
)
(
dla
dla
T
U
T
t
U
t
x
s
s
sygnał trójkątny:
2
3
-
1
-
4
2
-
1
-
4
)
(
dla
dla
s
s
s
s
T
t
U
f
t
f
U
T
t
U
f
t
f
U
t
x
s
s
s
s
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
4
6.3. WYKONANIE ĆWICZENIA
6.3.1. Badanie modulacji AM
Ustawić (sprawdzić czy nie są już wpisane) następujące dane:
czas badanego przebiegu
t
max
= 1 ms
dolną częstotliwość zakresu badanego widma
f
d
= 0 Hz
górną częstotliwość zakresu badanego widma
f
g
= 40 kHz
Powyższe dane pozostawić bez zmian przez cały czas ćwiczenia
.
Ustawić (sprawdzić czy nie są już wpisane):
U
n
= 20 V
f
n
= 20 kHz
modulacja - AM
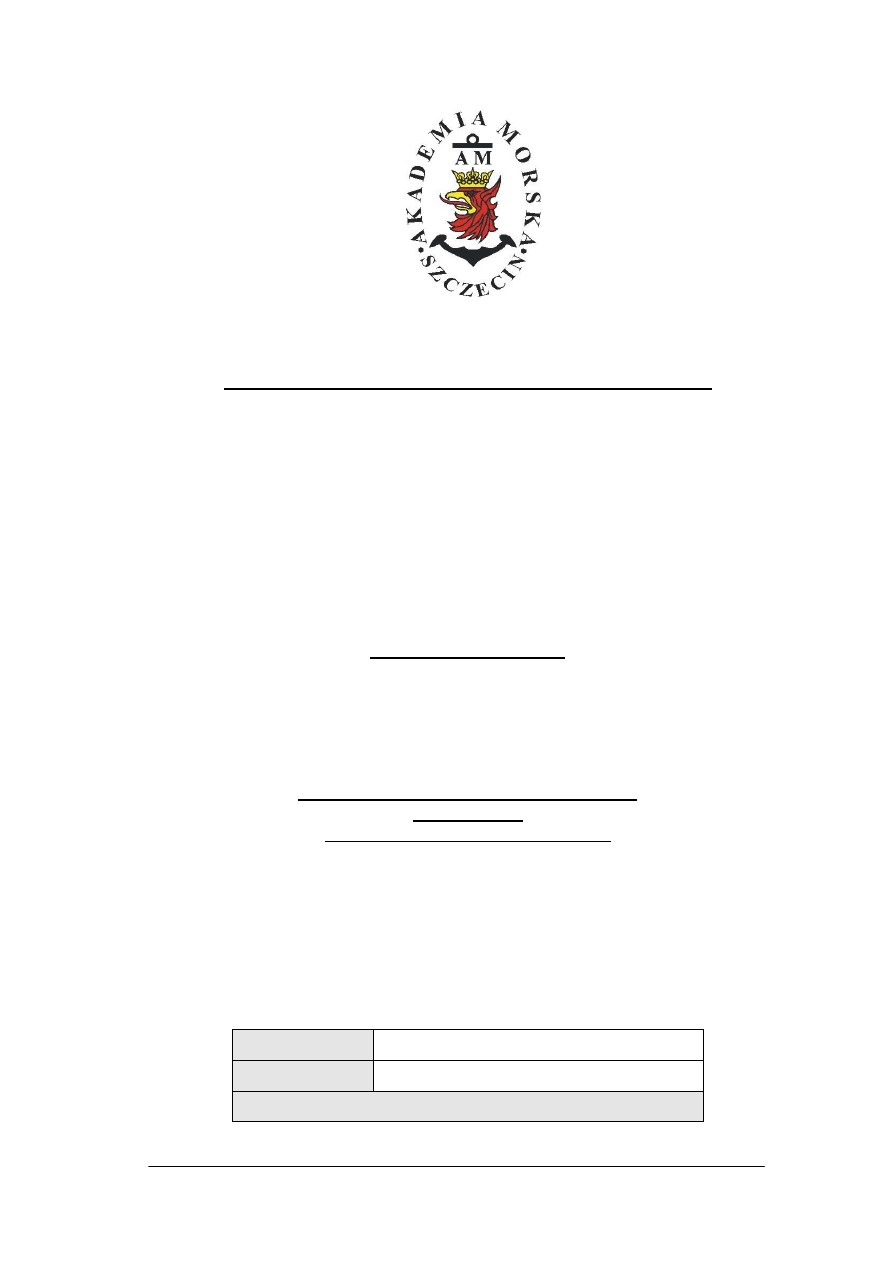
m = 100 %
U
s
= 20 V
f
s
= 1 kHz
Zmieniać kolejno kształt sygnału modulującego na:
1 sin – sygnał prosty sinusoidalny,
2 sin – sygnał złożony z sumy dwóch sinusoid,
3 sin – sygnał złożony z sumy trzech sinusoid,
prostokątny,
trójkątny.
Dla każdego ustawionego kształtu sygnału modulującego należy:
przerysować dokładnie przebiegi sygnałów,
przerysować widmo sygnału zmodulowanego
zapisać na karcie pomiarowej współczynnik głębokości modulacji m,
zapisać na karcie pomiarowej parametry sygnału nośnego i modulującego.
6.3.2. Badanie wpływu częstotliwości sygnałów nośnego i modulującego na widmo
sygnału zmodulowanego
Ustawić kształt sygnału modulującego na 1 sin.
a. Ustawić częstotliwość sygnału modulującego:
f
s
= 1 kHz.
Zmieniać kolejno częstotliwość sygnału nośnego:
f
n
= 10 kHz,
f
n
= 20 kHz,
f
n
= 30 kHz.
Zapisać jak zmieniał się sygnał zmodulowany i widmo sygnału zmodulowanego.
Przerysować widma.
b. Ustawić częstotliwość sygnału nośnego
f
n
= 20 kHz.
Zmieniać częstotliwość sygnału modulującego:
f
s
= 1 kHz,
f
s
= 2 kHz,
f
s
= 3 kHz.
Zapisać jak zmieniał się sygnał zmodulowany i widmo sygnału zmodulowanego.
Przerysować widma.
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
5
6.3.3. Badanie wpływu amplitud sygnałów na proces modulacji AM
Ustawić częstotliwość sygnału nośnego:
f
n
= 20 kHz
i częstotliwość sygnału modulującego
f
s
= 2 kHz
.
Ustawić amplitudę sygnału nośnego
U
n
= 30 V.
Wybrać opcję ręcznego ustawiania współczynnika głębokości modulacji m:
Zmienić skalę wykresów dla sygnałów: U
min
= -60 V ; U
max
= 60 V
Zapisać jak zmienił się sygnał zmodulowany, jak zmieniło się widmo sygnału
zmodulowanego,
jak
zmienił
się
współczynnik
głębokości
modulacji
m.
Przerysować sygnał zmodulowany i widmo.
Ustawić amplitudę sygnału nośnego ponownie na:
U
n
= 20 V.
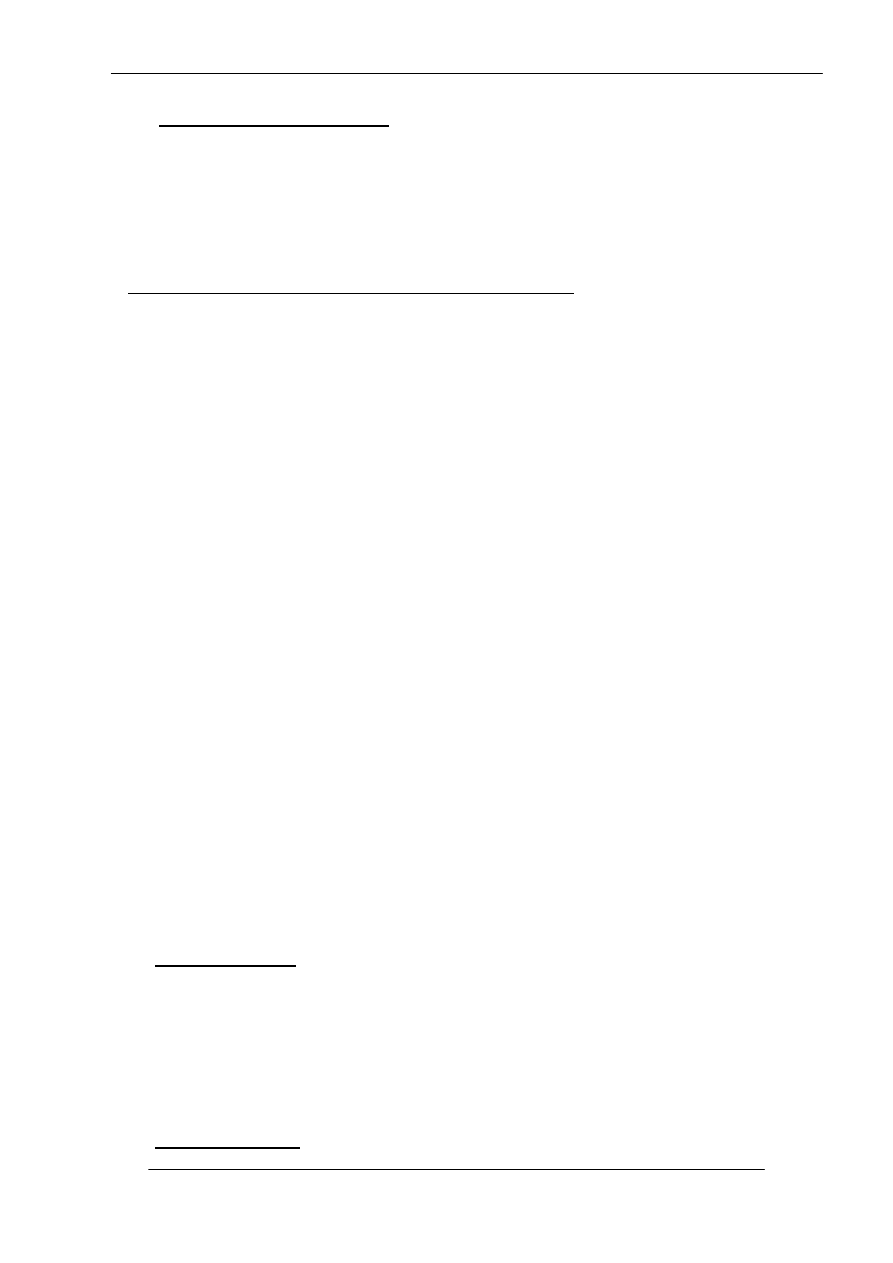
Zmienić skalę wykresów:
Dla sygnałów: U
min
= -100 V ; U
max
= 100 V
Dla widma: U
max
= 40 V
Zmienić współczynnik głębokości modulacji na
:
m
= 150 %.
Zapisać jak zmienił się sygnał zmodulowany, jak zmieniło się widmo, oraz wartość amplitudy
sygnału modulującego
U
s
.
Przerysować sygnał zmodulowany i widmo.
Zmienić wartość współczynnika głębokości modulacji na:
m
= 200 %.
Jak zmieniło się widmo, przebieg zmodulowany i wartość amplitudy sygnału modulującego.
Przerysować sygnał zmodulowany i widmo.

Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
6
Na podstawie zaobserwowanych procesów znaleźć zależność pomiędzy amplitudą sygnału
nośnego
U
n
,
amplitudą sygnału modulującego
U
s
a współczynnikiem głębokości modulacji
m.
6.3.4. Badanie modulacji PM i FM
Przejść do zakładki symulacji modulacji fazy i częstotliwości. Ustawić następujące dane
:
U
n
= 20 V
f
n
= 20 kHz
Modulacja
- PM i FM
d
ff
= 1
d
fc
= 6280
U
s
= 10 V
f
s
= 1 kHz
Zmieniać kolejno kształt sygnału modulującego na:
1 sin – sygnał prosty sinusoidalny,
prostokątny,
trójkątny.
Dla każdego ustawionego kształtu sygnału modulującego należy:
przerysować dokładnie przebiegi sygnałów,
zapisać dewiację fazy i dewiację częstotliwości,
zapisać parametry sygnału nośnego i modulującego.
Na podstawie zaobserwowanych procesów znaleźć zależność pomiędzy dewiacją fazy a dewiacją
częstotliwości.
6.3.5. Badanie modulacji rzeczywistej AM i FM
Obserwować przebiegi na oscyloskopie zademonstrowane przez prowadzącego. Przerysować
przebiegi oraz widma wskazane przez niego. Przerysować widma dla emisji A3E, H3E, J3E.
6.4. Warunki zaliczenia ćwiczenia
Warunkiem zaliczenia ćwiczenia jest:
napisanie z wynikiem pozytywnym krótkiego sprawdzianu na początku zajęć;
wykonanie ćwiczenia;
sporządzenie sprawozdania według instrukcji zawartej poniżej;
obrona sprawozdania na następnych zajęciach;
potwierdzenie opanowania zakresu ćwiczenia na ostatnich zajęciach
zaliczeniowych;
W sprawozdaniu należy zamieścić:
wzory opisujące modulacje amplitudy oraz modulacje fazy i częstotliwości,
przebiegi dotyczące modulacji,
wyjaśnienie jaki jest wpływ sygnału nośnego na sygnał zmodulowany i widmo w modulacji AM,
wyjaśnienie jaki jest wpływ sygnału modulującego na sygnał zmodulowany i widmo w modulacji
AM,
wyjaśnienie, jak powstaje sygnał zmodulowany fazowo oraz jak powstaje sygnał zmodulowany
częstotliwościowo,
zależności opisane w pkt. 6.3.3 i 6.3.4.
przebiegi z punktu 6.3.5. wskazane przez prowadzącego oraz widma dla emisji A3E, H3E, J3E.
własne wnioski i spostrzeżenia
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
7
6.5.1. Analiza sygnałów elektrycznych
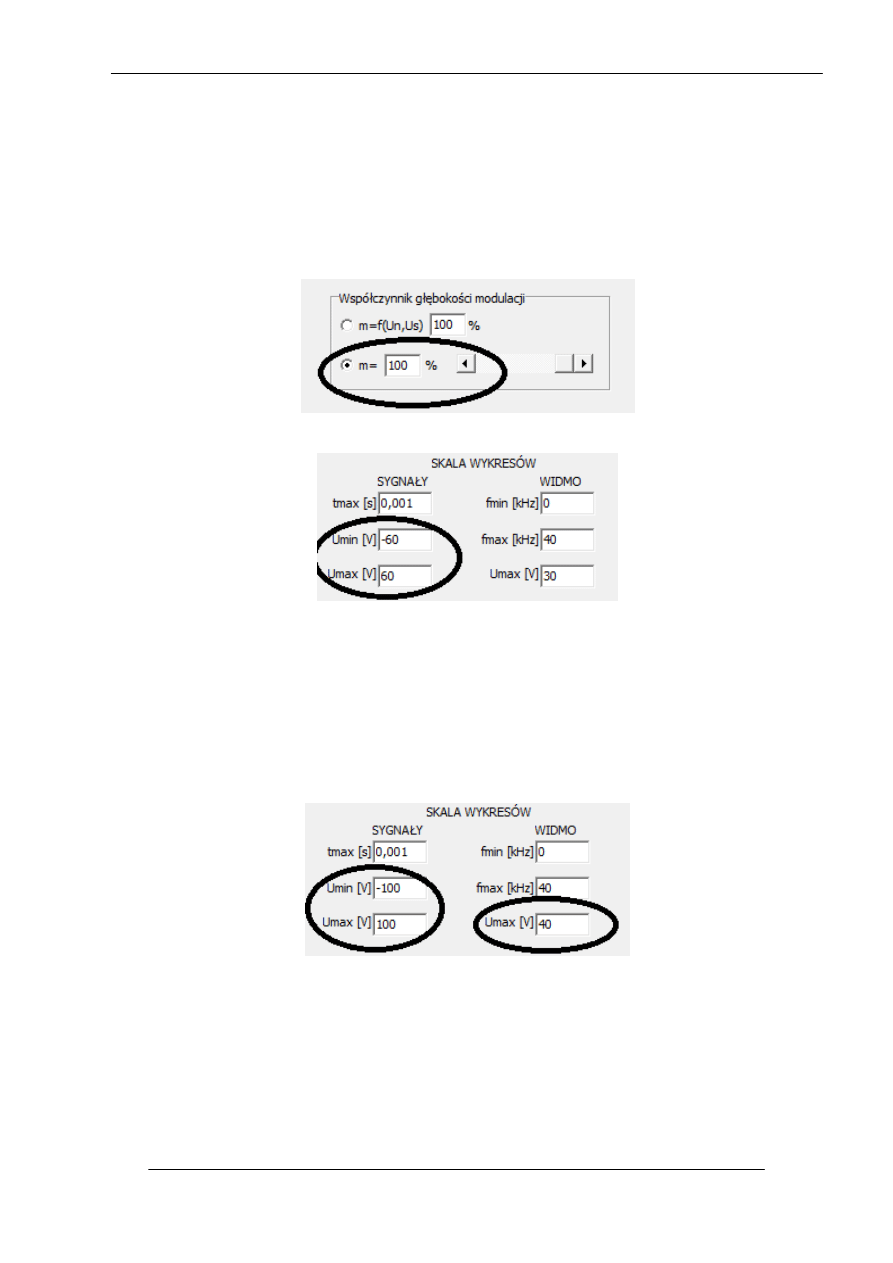
Sygnałem elektrycznym nazywamy przebieg w czasie wielkości elektrycznej tj. napięcia lub
natężenia prądu elektrycznego. Sygnały mogą być stałe lub zmienne. Do grupy sygnałów stałych
zaliczamy sygnały, w których wartość prądu lub napięcia pozostaje niezmienna w czasie (rys 6.5.1.).
Z punktu widzenia elektroniki do tej grupy sygnałów będziemy zaliczać również sygnały o
zmieniającej się wartości, pod warunkiem, że będą to zmiany powolne, a wartość prądu lub napięcia
nie będzie zmieniała biegunowości (rys 6.5.2.). Typowym przykładem takiego sygnału jest napięcie na
zaciskach akumulatora samochodowego w trakcie jazdy.
Rys. 6.5.1 Rys. 6.5.2
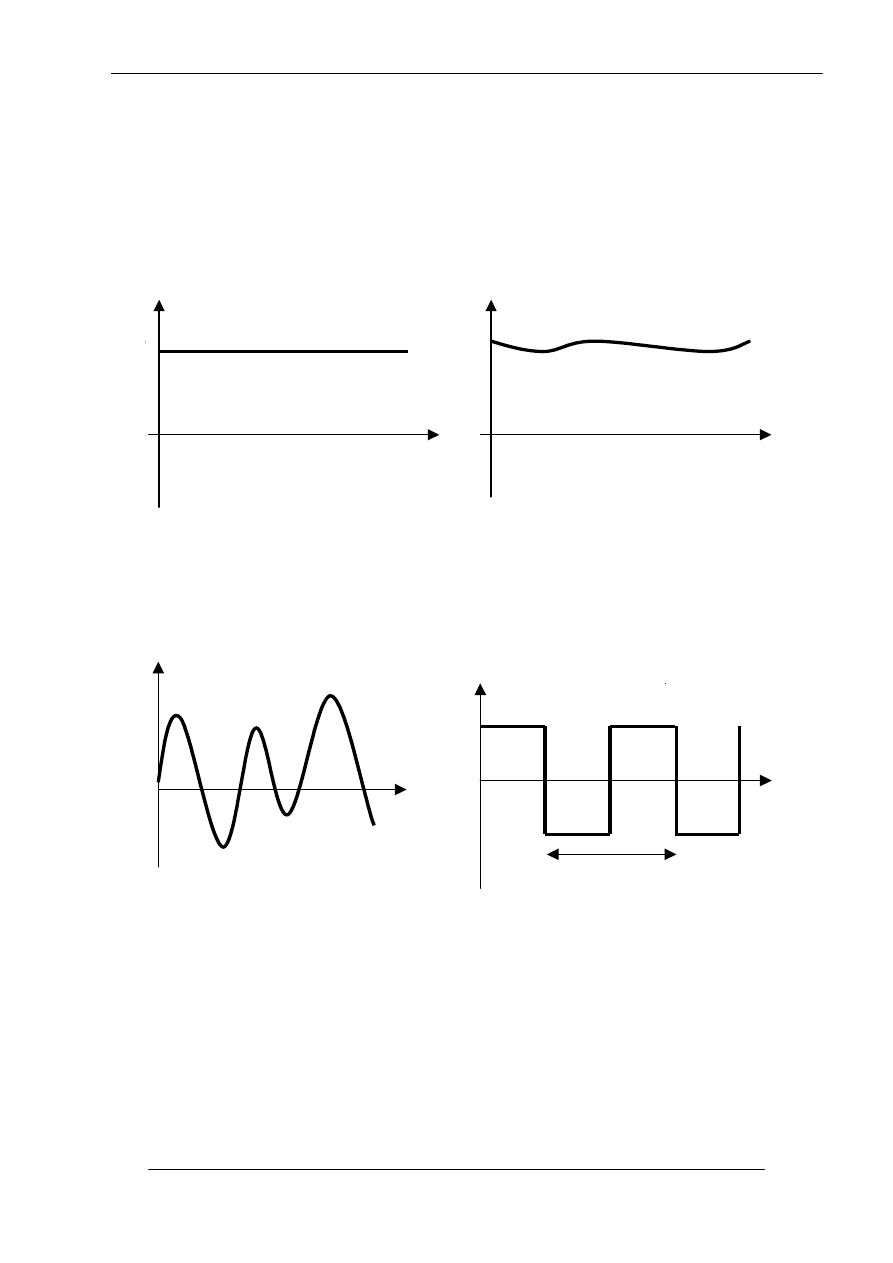
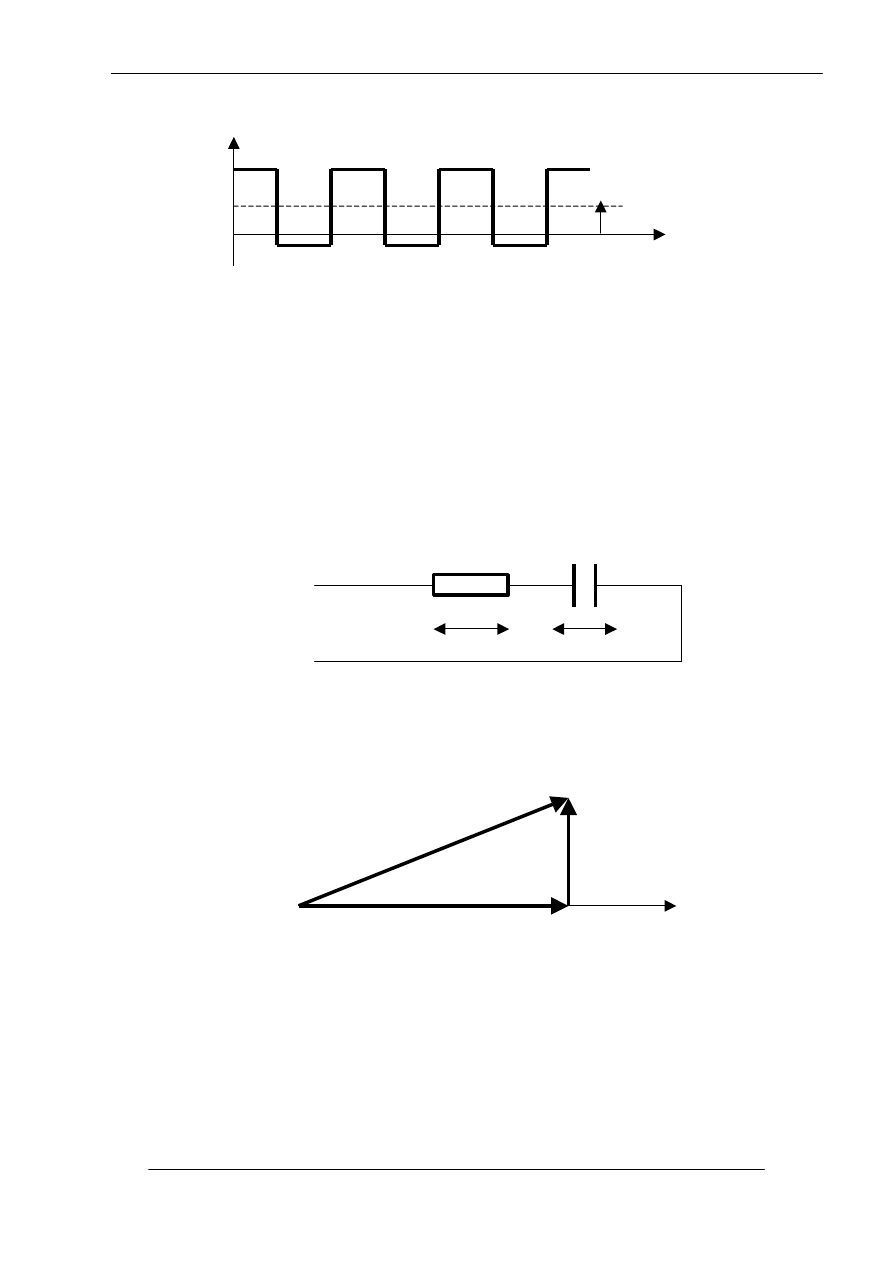
Drugą grupę sygnałów stanowią sygnały zmienne. Są to takie sygnały, w których zmienia się
kierunek przepływającego prądu lub biegunowość napięcia (rys. 6.5.3). Wśród sygnałów zmiennych
szczególną rolę odgrywają sygnały okresowe. Sygnałem okresowym nazywamy taki sygnał
elektryczny, w którym możemy wyróżnić stały odcinek czasu zwany okresem T, po którym wartość
sygnału ulega powtórzeniu (rys 6.5.4).
Rys. 6.5.3 Rys. 6.5.4
Sygnały zmienne mogą występować bez składowej stałej, jak na rys.6.5.4 lub ze składową stałą
(rys.6.5.5). Składowa stała może być dodatnia lub ujemna i stanowi po prostu wartość średnią sygnału.
U
t
t
Rys.5.2
U U
t.
t
Rys.5.1 Rys. 5.2
U
U
t
t
T
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
8
Rys. 6.5.5
Sygnały elektryczne, w zależności od tego jaką cechę sygnału chcemy uwypuklić, mogą być
prezentowane w różny sposób. Na rysunkach 6.5.1 do 6.5.5 sygnały były przedstawiane w sposób
graficzny. Jest to najbardziej naturalna prezentacja sygnałów, w takiej postaci oglądamy je np. na
oscyloskopie. Przy tym systemie prezentacji na osi rzędnych odkładane są chwilowe wartości prądu
lub napięcia wyrażone w amperach lub woltach (albo w jednostkach pochodnych mA, mV i tp.), a na
osi odciętych czas wyrażany w sekundach lub jednostkach pochodnych.
W sytuacji gdy zależy nam szczególnie na pokazaniu zależności fazowych między sygnałami
elektrycznymi, bardziej przydatna okazuje się prezentacja wektorowa sygnałów. W tym systemie
prezentacji długości wektorów przedstawiają w przyjętej skali wartości napięć lub prądów, a kąty
między nimi zależności fazowe między poszczególnymi napięciami a prądami. Weźmy dla przykładu
prosty obwód elektryczny składający się z rezystancji R i pojemności C zasilany napięciem
sinusoidalnie zmiennym U o częstotliwości f przedstawiony na rys. 6.5.6.
Rys. 6.5.6
Oczywiście, zarówno prąd płynący w obwodzie jak i napięcie zasilające oraz spadki napięć na
rezystancji i pojemności można by było przedstawić w postaci graficznej jako cztery poprzesuwane
względem siebie sinusoidy, jednak rysunek ten byłby mało czytelny. Zdecydowanie bardziej
przydatną będzie tu prezentacja wektorowa prądów i napięć (rys. 6.5.7).
Rys. 6.5.7
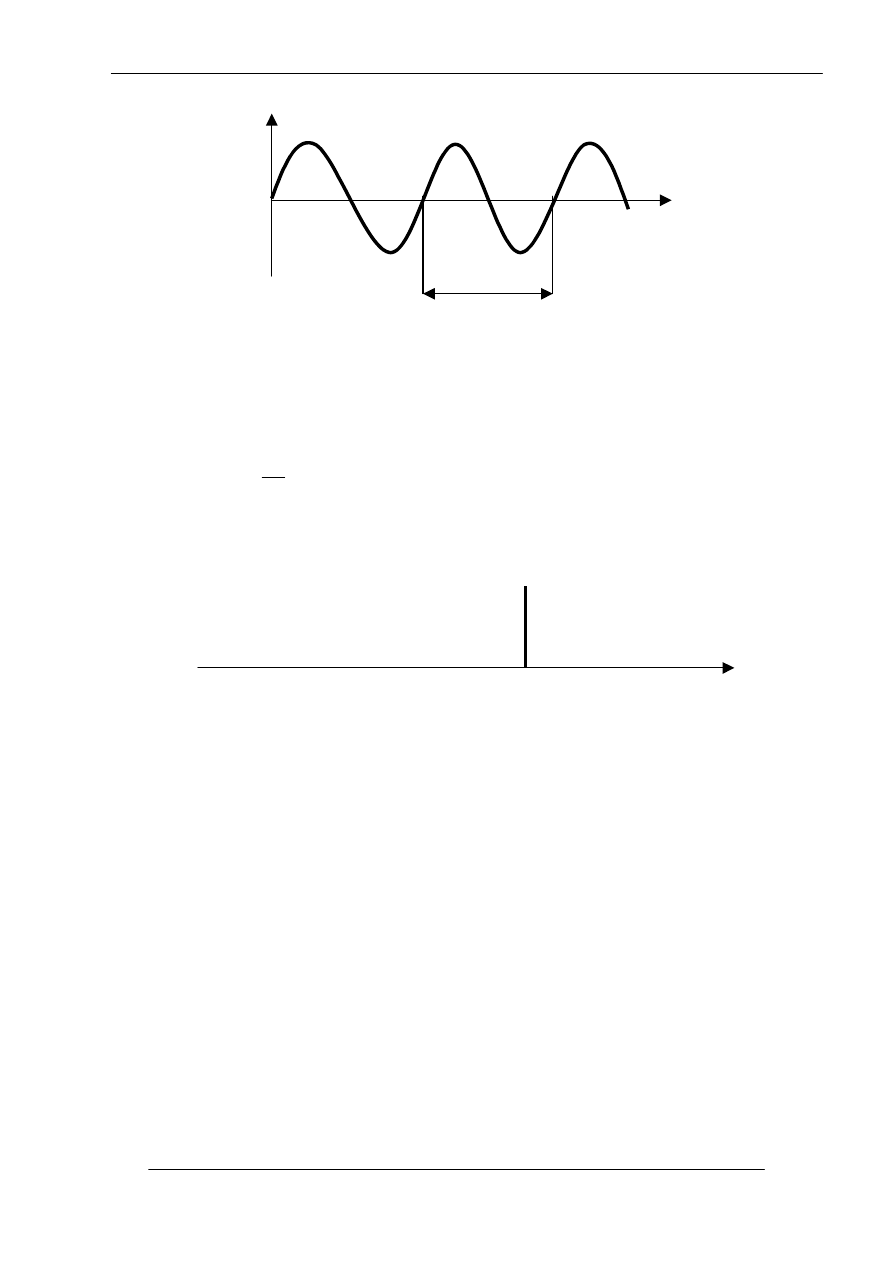
Jeszcze inną metodą prezentacji sygnałów jest przedstawianie ich w postaci widma
częstotliwości. Rozważmy w tym celu prosty sygnał sinusoidalny przedstawiony graficznie na rys.
6.5.8.
U
Składowa stała
t.
I R C
U
U
R
U
C
U
U
C
I
U
X
Rys. 5.7
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
9
Rys. 6.5.8
Sygnał ten możemy zapisać analitycznie w postaci:
gdzie:
– U
0
– amplituda sygnału
– – pulsacja
W celu przedstawienia tego sygnału w postaci widmowej na osi wyskalowanej w jednostkach
częstotliwości rysujemy prążek o wysokości równej, w przyjętej skali, amplitudzie sygnału. Położenie
prążka na osi określa jego częstotliwość (rys.6.5.9).
Rys. 6.5.9
Należy zwrócić uwagę, że rysunki 6.5.8 i 6.5.9 przedstawiają ten sam sygnał, różnią się jedynie
sposobem jego prezentacji.
Prezentacji widmowej szczególnie często używa się dla sygnałów złożonych pojawiających się w
zagadnieniach związanych z łącznością radiową. W tym miejscu rozpatrzmy pojęcie sygnału
złożonego. Wspomniany wyżej sygnał sinusoidalny zwany również harmonicznym określa się w
elektronice mianem sygnału prostego. Każdy inny sygnał, o dowolnym kształcie, jest sygnałem
złożonym składającym się ze skończonej lub nieskończonej sumy sygnałów prostych (sinusoidalnych)
o różnych częstotliwościach. Sumę tą przedstawioną na osi częstotliwości w postaci układu prążków
nazywamy widmem częstotliwości sygnału złożonego. Rozkład widma zależy od charakteru sygnału
złożonego. Rozpatrzymy tu widma częstotliwości dla trzech grup sygnałów, a mianowicie dla
sygnałów okresowych, akustycznych i impulsowych.
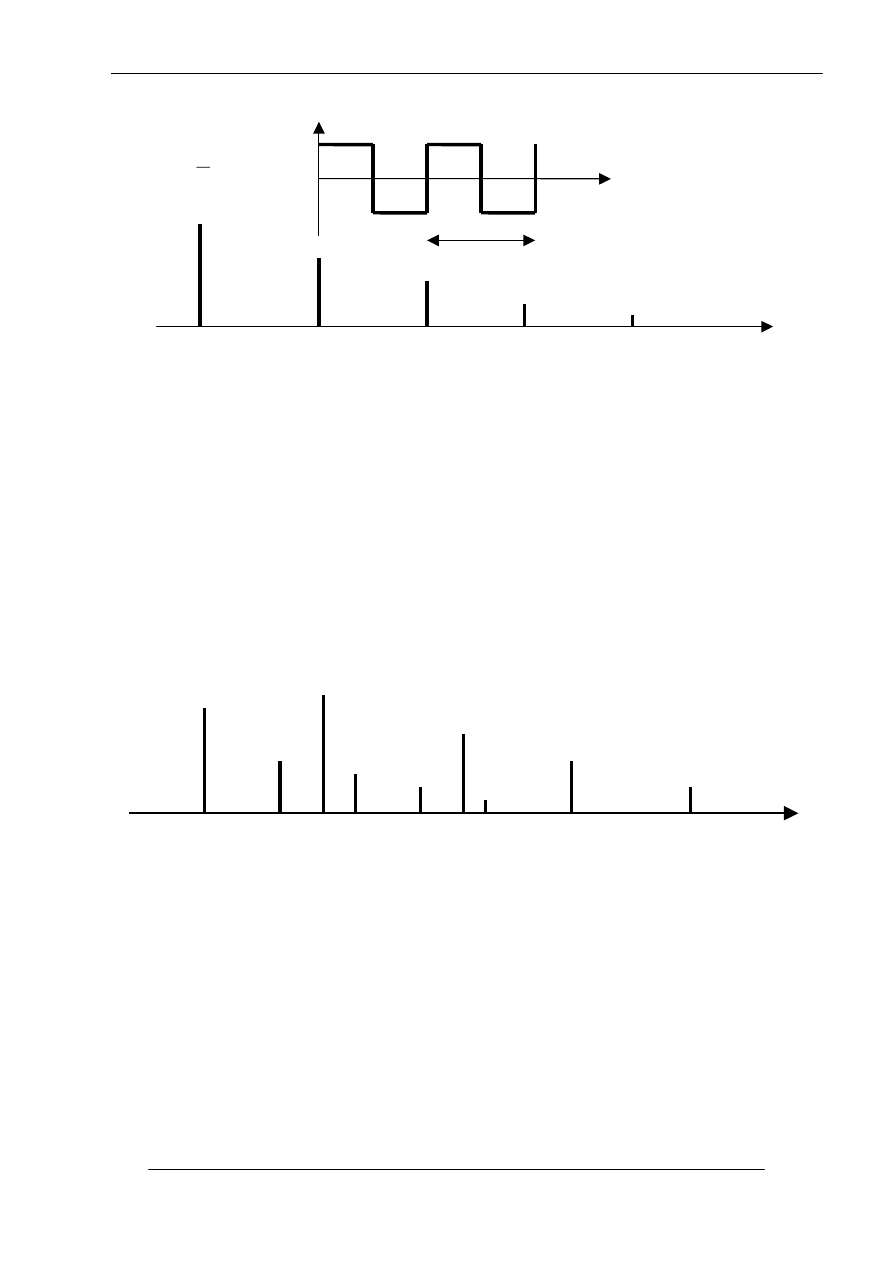
Sygnał okresowy posiada regularne widmo prążkowe składające się ze skończonej lub
nieskończonej sumy sygnałów prostych (sinusoidalnych), o częstotliwościach będących
wielokrotnościami częstotliwości podstawowej sygnału złożonego. Suma ta będzie zawierała prążek o
częstotliwości zerowej, jeśli w sygnale złożonym występowała składowa stała. W zależności od
kształtu sygnału złożonego w widmie mogą występować harmoniczne tylko parzyste, tylko
nieparzyste bądź zarówno parzyste jak i nieparzyste. Jako przykład na rys. 6.5.10 przedstawiono
widmo sygnału prostokątnego bez składowej stałej, o częstotliwości f
0
.
U
t
T
t
U
u
o
sin
T
f
2
2
f
[Hz]
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
10
Rys. 6.5.10
Jak wynika z rysunku, w przypadku sygnału prostokątnego widmo składa się z harmonicznych
nieparzystych. Brak składowej stałej w sygnale powoduje brak prążka o częstotliwości zerowej.
Aczkolwiek ilość prążków w widmie jest nieskończenie wielka, to jednak z uwagi na szybkie malenie
wyższych harmonicznych, pod uwagę wystarczy wziąć maksymalnie dziesięć pierwszych
harmonicznych, a więc pasmo zajmowane przez ten sygnał rozciąga się praktycznie od fo do 9fo.
Podobny charakter ma widmo sygnału trójkątnego, również występują w nim harmoniczne
nieparzyste. Natomiast sygnały na wyjściach prostowników jedno lub dwupołówkowych posiadają
widmo składające się z harmonicznych parzystych. Oczywiście istnieją również sygnały okresowe
zawierające w widmie zarówno harmoniczne parzyste jak i nieparzyste.
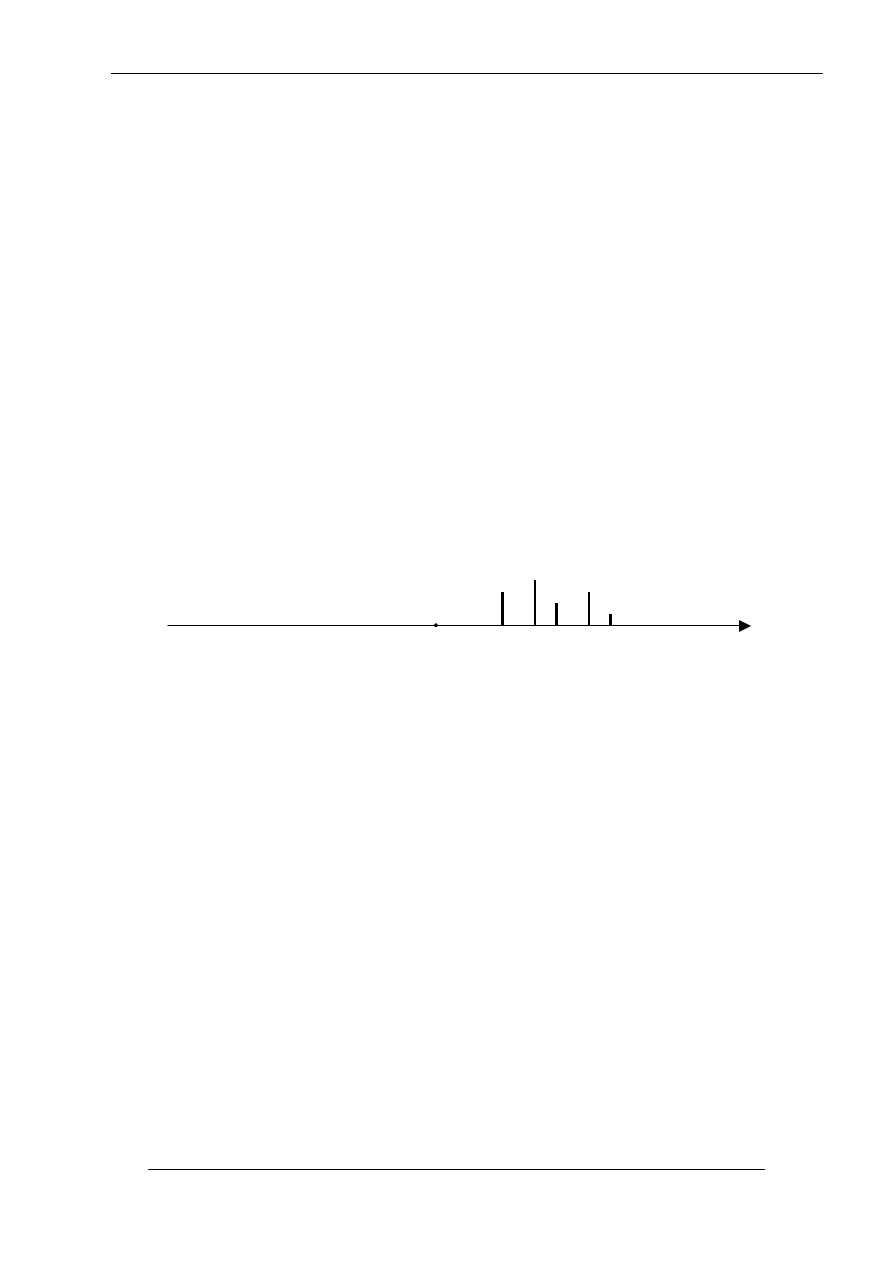
Sygnał akustyczny składa się z wielu nałożonych na siebie dźwięków. Każdy z tych dźwięków
posiada określoną częstotliwość (wysokość tonu) oraz zawiera pewne harmoniczne, będące
wielokrotnościami częstotliwości podstawowej, które określają jego barwę. Widmo tego sygnału
będzie się więc składało z wielu nieregularnie rozłożonych prążków przedstawiających amplitudy
dźwięków składowych oraz ich harmonicznych. Na rys. 6.5.11. przedstawiono przykładowe widmo
sygnału akustycznego składające się z dwóch dźwięków, łącznie z ich harmonicznymi.
Rys..6.5.11
Sygnał akustyczny zawiera częstotliwości teoretycznie w paśmie 20 do 20 000 Hz. Szczególnie
istotna jest maksymalna częstotliwość tego sygnału. W praktyce zależy ona od technicznych
możliwości zapisu i odtwarzania dźwięków oraz pewnych uregulowań prawnych związanych z
systemem transmisji. I tak:
dla sygnałów naddawanych na VHF z modulacją częstotliwości f
max
= 15 000 Hz
dla sygnałów naddawanych na MF i HF z modulacją amplitudy f
max
= 4 500 Hz
dla sygnałów naddawanych w ramach łączności morskiej f
max
= 2 800 Hz
Oczywiście im szersze pasmo nadawanych częstotliwości, tym lepsza jakość dźwięku.
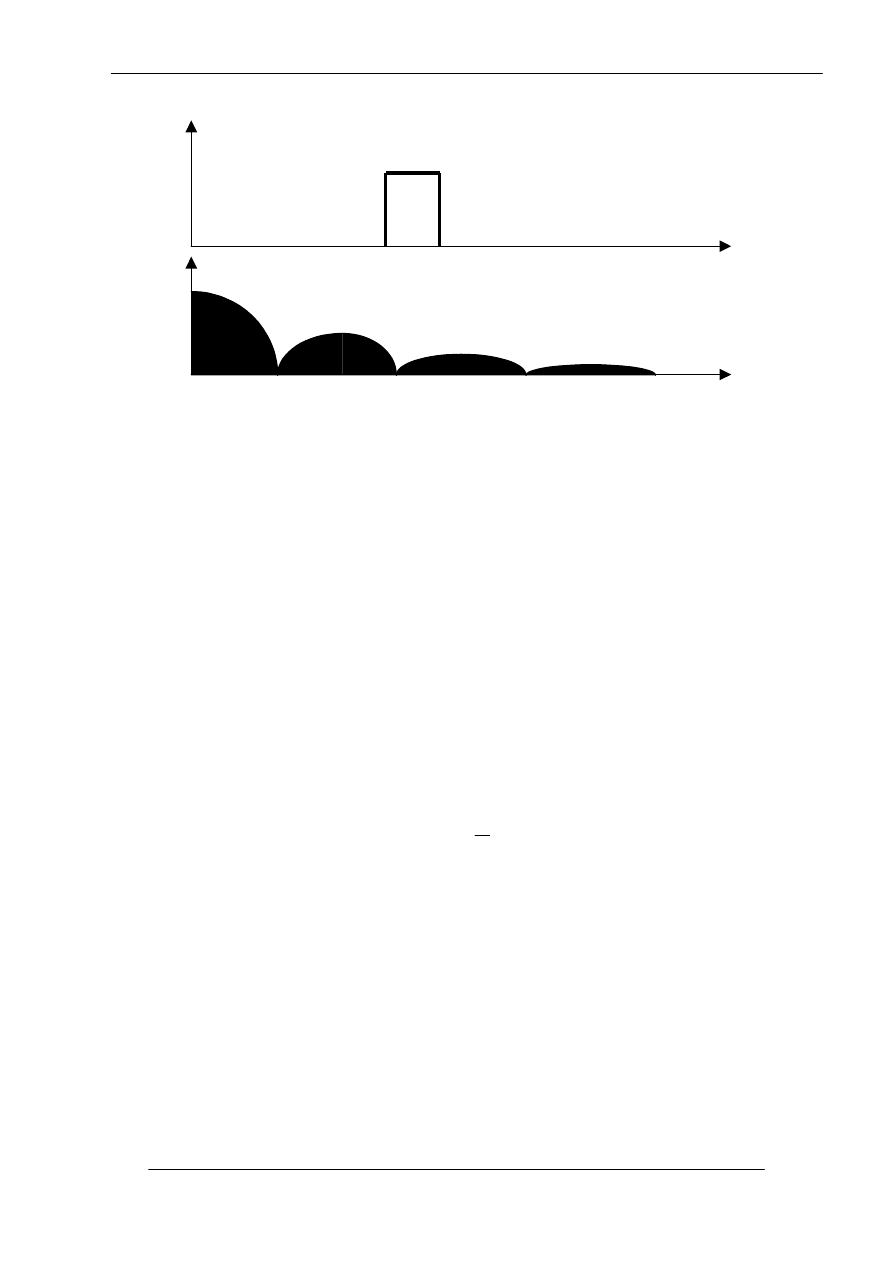
Sygnał impulsowy posiada widmo ciągłe rozciągające się teoretycznie od zera do
nieskończoności. W praktyce części składowe widma o bardzo dużych częstotliwościach posiadają tak
małe amplitudy, że można nie brać ich pod uwagę. Jako przykład tego typu widma na rys 6.5.12
przedstawiono pojedynczy impuls prostokątny o czasie trwania
i jego widmo.
U
T
f
1
0
t
T
f
f
0
3f
0
5f
0
7f
0
9f
0
f
f
1
2f
1
f
2
3f
1
4f
1
2f
2
5f
1
3f
2
4f
2
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
11
Rys..6.5.12
Na powyższym rysunku pokazano cztery grupy zawierające częstotliwości składowe widma
impulsu prostokątnego. W rzeczywistości grup tych jest nieskończenie wiele, jednak dalsze części
widma mają tak małe amplitudy, że można nie brać ich pod uwagę. Ponieważ szerokość grupy jest
odwrotnie proporcjonalna do czasu trwania impulsu
, więc cały brany pod uwagę zakres widma
również zależy od czasu trwania impulsu. Im krótszy impuls, tym szersze jest jego widmo
częstotliwości.
6.5.2 Modulacja
Ogólna zasada radiokomunikacji polega na doprowadzeniu do anteny nadawczej, znajdującej się
w nadajniku prądu o takim kształcie, aby była w nim zapisana informacja, którą chcemy przekazać.
Wokół anteny powstaje pole, zwane falą elektromagnetyczną, o kształcie odpowiadającym prądowi
doprowadzonemu do anteny. Fala ta rozchodzi się w przestrzeni z prędkością równą prędkości światła
(c = 300 000 km/s) i docierając do anteny odbiorczej powoduje zaindukowanie się w niej napięcia o
kształcie odpowiadającym kształtowi fali elektromagnetycznej. W ten sposób sygnał z nadajnika
dociera do odbiornika w takim kształcie jaki został mu nadany w nadajniku. Pomijamy tu na razie
zakłócenia, które mogą się pojawić w trakcie transmisji. Z teorii budowy anten wynika, że aby
uzyskać skuteczną moc nadawania, wymiary geometryczne anteny powinny być zbliżone do długości
nadawanej fali. Zależność długości fali od jej częstotliwości wyraża się następująco:
gdzie:
- długość fali
c – prędkość światła
f - częstotliwość
Z powyższej zależności wynika, że dla częstotliwości akustycznych (20 – 20 000 Hz) antena
musiałaby posiadać wymiary liczone w setkach czy tysiącach kilometrów. Dlatego też nie jest
możliwe bezpośrednie przesyłanie tych sygnałów w ramach radiokomunikacji. Celem
przezwyciężenia tej trudności, w nadajniku wytwarzana jest specjalna fala nośna o stosunkowo dużej
częstotliwości (powyżej 150 kHz) i na niej w procesie modulacji zapisywany jest sygnał, który
chcemy przesyłać (akustyczny, telewizyjny, radarowy itp.).
Tak więc modulacją będziemy nazywać proces zapisywania informacji na fali nośnej.
Falę nośną będącą sygnałem sinusoidalnym możemy przedstawić:
i = I
m
sin(
t +
)
gdzie: i – wartość chwilowa prądu,
I
m
– amplituda prądu
- pulsacja równa 2
F
U
t
U
f
0 2
/
4
/
6
/
8
/
f
c
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
12
- faza
Jak wynika z podanej zależności w procesie modulacji możemy zmieniać albo wartość amplitudy
(modulacja AM), albo kąta (modulacja kątowa). W zależności od sposobu uzależnienia kąta od
przebiegu modulującego uzyskujemy modulację częstotliwościową FM lub modulację fazową PM.
6.5.3. Modulacja amplitudy AM
Modulacja amplitudy polega na uzależnieniu amplitudy fali nośnej od wartości sygnału
modulującego. Fala nośna jest sygnałem sinusoidalnym wytwarzanym w nadajniku przez specjalny,
bardzo stabilny generator. Jej częstotliwość to częstotliwość nominalna danej stacji nadawczej.
Sygnałem modulującym jest sygnał informacyjny, który chcemy przesyłać. Może to być prąd z
mikrofonu, kamery telewizyjnej itp.
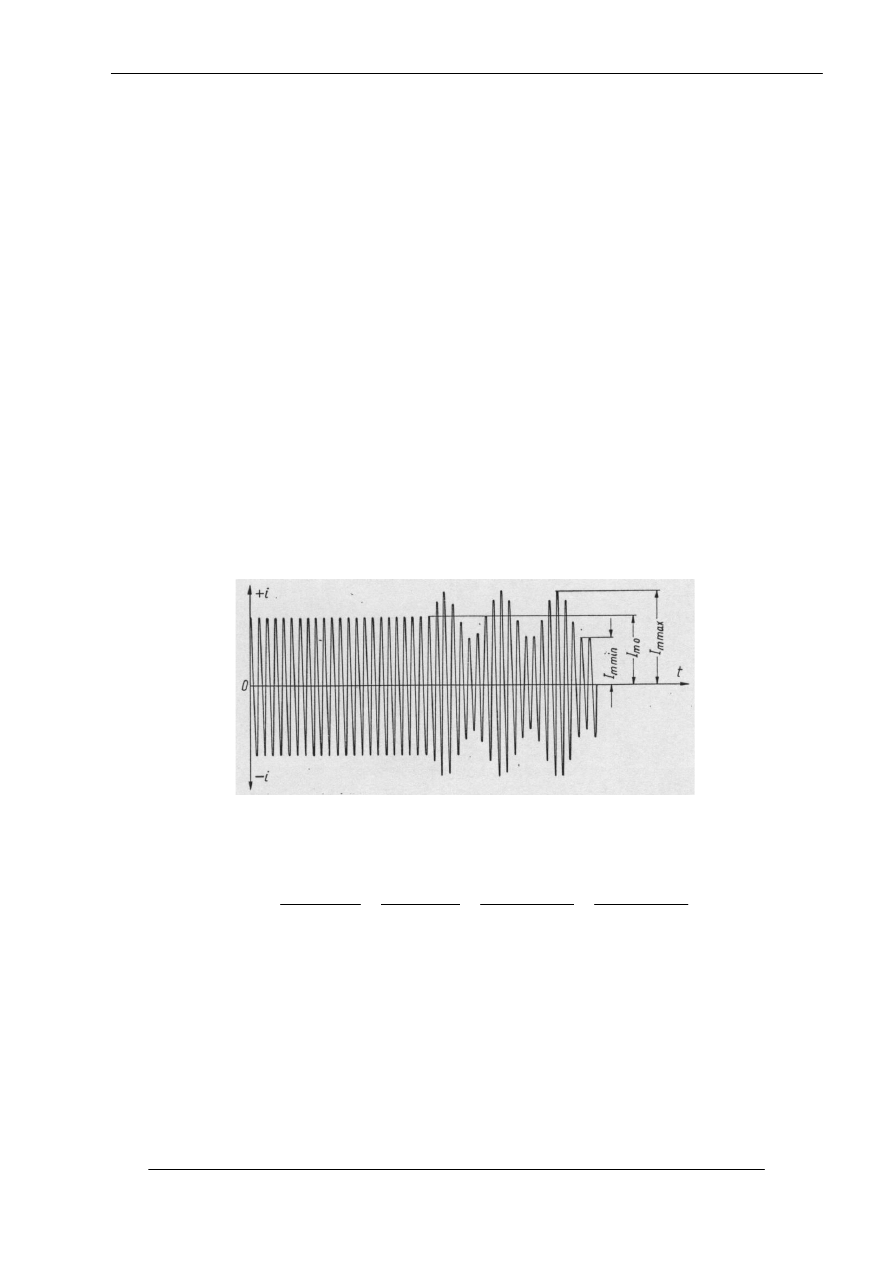
Rozpatrzymy teraz najprostszy przykład modulacji amplitudy, gdy prąd i o częstotliwości
radiowej F jest modulowany tonem prostym sinusoidalnym o częstotliwości akustycznej f. Aby
uzyskać skuteczną modulację F powinna być przynajmniej 10 razy większa od f. Na rys.6.5.13
przedstawiono sygnał, początkowo bez modulacji, a następnie zmodulowany takim tonem prostym, w
funkcji czasu. Podczas modulacji amplituda I
m
prądu i zmienia się według zależności:
I
m
= I
m0
+ m sin
t
gdzie: I
m
– chwilowa wartość amplitudy prądu modulowanego,
I
m0
- amplituda fali nośnej,
m - głębokość modulacji
- pulsacja częstotliwości akustycznej równa 2
f
Rys. 6.5.13
Głębokością modulacji nazywa się stosunek największego przyrostu amplitudy fali nośnej do
amplitudy fali nośnej niemodulowanej.
Głębokość modulacji może się zmieniać w granicach od zera do jedności (0 – 100%). Głębokość
modulacji 0 oznacza sygnał niemodulowany, głębokość powyżej 100% oznaczałaby sygnał
przemodulowany, czyli pojawiłyby się zniekształcenia. W praktyce przyjmuje się najczęściej
głębokość modulacji w granicach 30 – 70 %. Z rys 6.5.13 wynika, że wartość chwilową prądu
zmodulowanego można przedstawić wzorem:
W wyrażeniu tym wzięto funkcję cosinus zamiast sinusa z uwagi na jej parzystość, co upraszcza
przekształcenia a nie ma wpływu na zawartość merytoryczną wyrażenia. Po zwykłym przekształceniu
trygonometrycznym powyższego wzoru otrzymujemy:
min
max
min
max
0
min
max
0
min
0
0
0
max
2
m
m
m
m
m
m
m
m
m
m
m
m
m
I
I
I
I
I
I
I
I
I
I
I
I
I
m
t
t
m
I
i
m
cos
)
cos
1
(
0
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
13
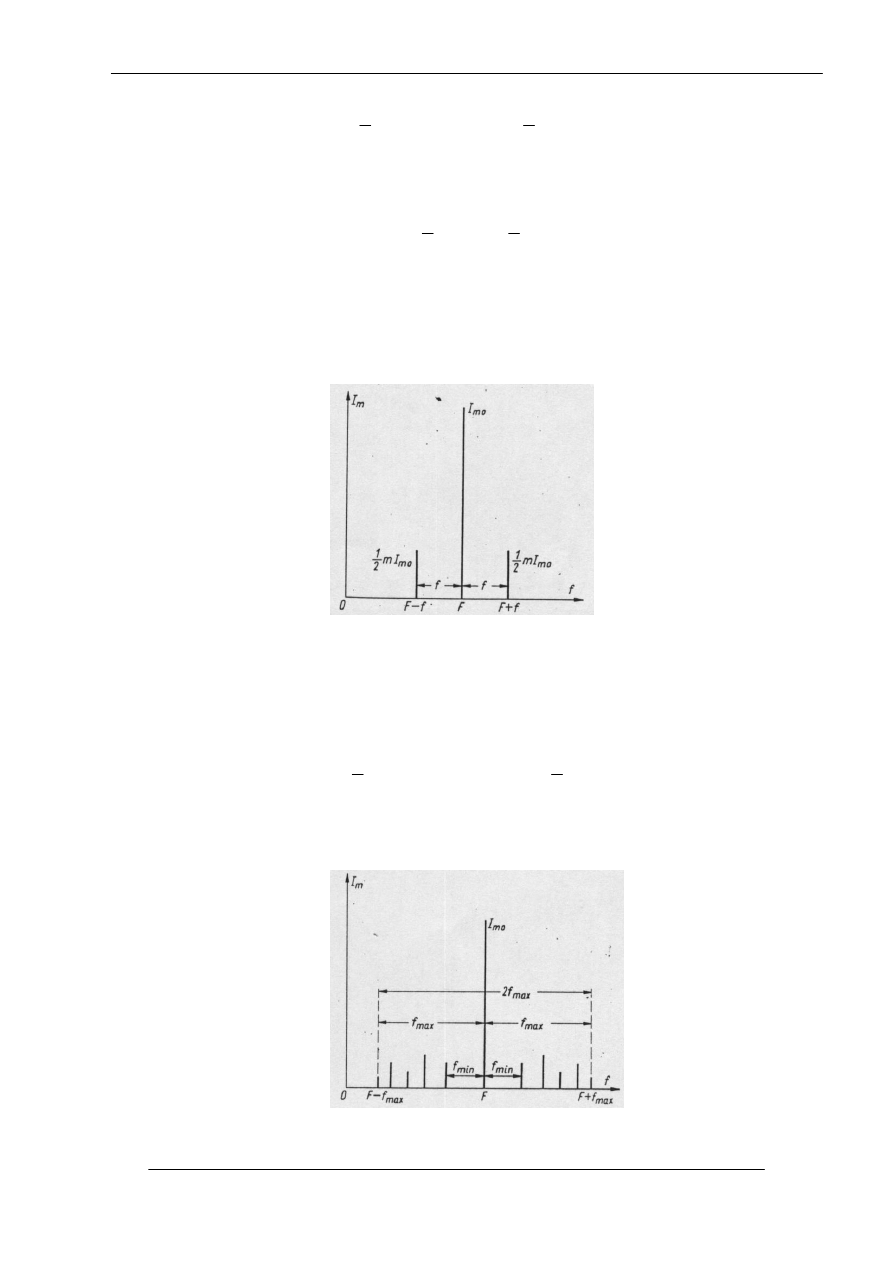
Z wzoru tego wynika, że prąd o amplitudzie modulowanej tonem prostym składa się z trzech
prądów cosinusoidalnych o częstotliwościach F, F+f oraz F-f i amplitudach odpowiednio równych:
Na rys. 6.5.14. amplitudy te są przedstawione w funkcji częstotliwości w postaci widma.
Środkowy prążek przedstawia prąd fali nośnej, zaś pozostałe dwa przedstawiają prądy wstęg
bocznych; dolnej i górnej. Częstotliwości tych prądów są częstotliwościami radiowymi, a różnica
między tymi częstotliwościami a częstotliwością fali nośnej F odpowiada częstotliwości akustycznej
sygnału modulującego f. Prądy o częstotliwościach wstęg bocznych mogą być wydzielone za pomocą
odpowiednich filtrów.
Rys.6.5.14
W rzeczywistości prądy mikrofonowe wytwarzane przy przesyłaniu mowy lub muzyki mają
kształt złożony, składają się bowiem z wielu częstotliwości (patrz – widmo sygnału akustycznego).
Dlatego też rzeczywiste widmo sygnału zmodulowanego amplitudowo będzie zawierało we wstęgach
bocznych nie po jednym lecz wiele prążków odpowiadających częstotliwościom składowym
rzeczywistego sygnału akustycznego. Zapis takiego widma można więc przedstawić w postaci:
We wzorze tym pierwszy wyraz odpowiada fali nośnej, następne zaś wyrazy stanowią
odpowiednio górne i dolne wstęgi boczne. Widmo sygnału zmodulowanego amplitudowo kilkoma
tonami prostymi (n = 5) przedstawiono na rys. 6.5.15.
Rys. 6.5.15.
t
mI
t
mI
t
I
i
m
m
m
)
cos(
2
1
)
cos(
2
1
cos
0
0
0
0
2
1
m
mI
0
2
1
m
mI
0
m
I
t
I
m
t
I
m
t
I
i
n
m
n
n
n
m
n
n
m
)
cos(
2
1
)
cos(
2
1
cos
0
1
0
1
0
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
14
Z rysunku wynika, że szerokość całego pasma częstotliwości zajmowanego przez sygnał
zmodulowany amplitudowo jest równa różnicy skrajnych częstotliwości bocznych:
B = (F + f
max
) – (F – f
max
) = 2 f
max
Modulacja amplitudy stosowana jest powszechnie w radiofonii programowej na falach długich
średnich i krótkich. Ponieważ szerokość pasma zajmowanego przez każdą stację nadawczą zależy od
maksymalnej częstotliwości w nadawanym sygnale akustycznym, przyjęto, że w radiofonii
programowej nie będą nadawane częstotliwości akustyczne wyższe niż 4.5 kHz. Powoduje to nie
najlepszą jakość nadawanej muzyki, ale zawęża pasmo zajmowane przez każdą stację nadawczą do 9
kHz.
6.5.4. Modulacja jednowstęgowa SSB
Z definicji głębokości modulacji wynika, że współczynnik m jest wprost proporcjonalny do
amplitudy sygnału modulującego. Wysokość prążków we wstęgach bocznych przenosi więc
informację o amplitudach czyli natężeniu poszczególnych dźwięków składowych sygnału
modulującego (akustycznego). Z kolei odległości prążków od prążka fali nośnej określają
częstotliwości tych dźwięków. Cała informacja o sygnale modulującym zawarta jest więc we
wstęgach bocznych. Łatwo można zauważyć (rys 6.5.15.), że wstęgi boczne, dolna i górna są
symetryczne względem prążka fali nośnej, informacja przez nie przenoszona jest więc dublowana.
Można więc, bez szkody dla zawartości informacyjnej sygnału, wyciąć za pomocą odpowiedniego
filtru jedną ze wstęg bocznych. Również prążek fali nośnej F nie przenosi żadnej informacji o sygnale
modulującym. Jest on wprawdzie niezbędny w procesie detekcji, ale można go odtworzyć
bezpośrednia w odbiorniku, bez konieczności przesyłania. Widmo sygnału zmodulowanego
jednowstęgowo bez fali nośnej przedstawiono na rys. 6.5.16.
Rys. 6.5.16.
Modulacja jednowstęgowa jest stosowana z uwagi na gorszą jakość głównie do przekazywania
mowy na falach krótkich (w radiokomunikacji morskiej również na falach pośrednich). Posiada ona
jednak dwie bardzo istotne zalety w stosunku do pełnej modulacji amplitudy: o połowę węższe pasmo
i mniejszą energię potrzebną do nadawania sygnału. Ponieważ, jak już wspomniano modulacja
jednowstęgowa stosowana jest jedynie do przekazywania mowy, maksymalną częstotliwością
nadawaną w sygnale akustycznym jest 2800 Hz. Szerokość pasma wynosi zatem dla modulacji
jednowstęgowej:
B = f
max
= 2.8 kHz
Modulacja jednowstęgowa bez fali nośnej oznaczana jest symbolem J3E.
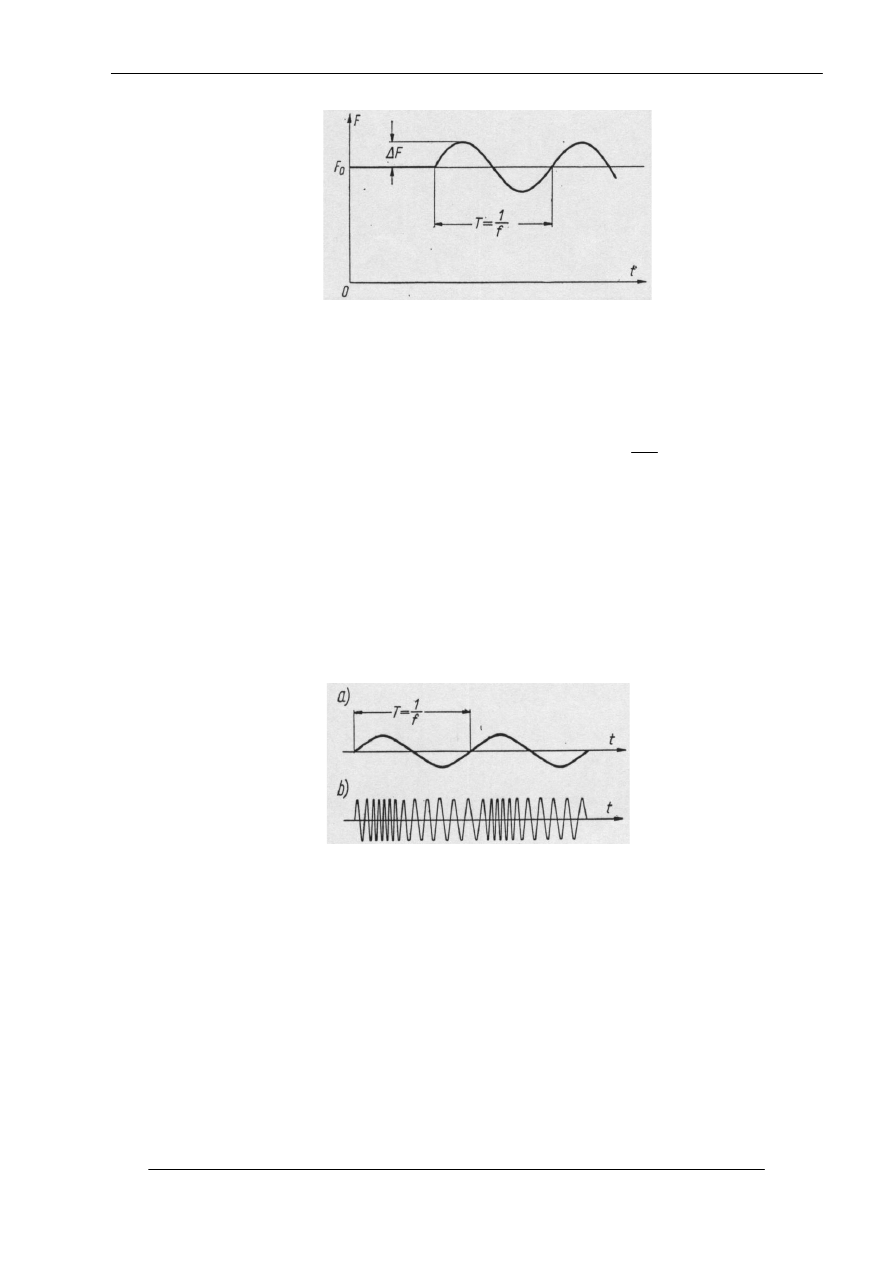
6.5.5. Modulacja częstotliwości (FM)
Modulacja częstotliwości jest jednym ze sposobów uzyskiwania modulacji kątowej. Polega ona
uzależnieniu częstotliwości fali nośnej od wartości sygnału modulującego. Sposób uzależnienia
częstotliwości w czasie przy modulacji tonem prostym przedstawiono na rys. 6.5.17. Podobnie jak w
przypadku modulacji amplitudy fala nośna o częstotliwości F
0
wytwarzana jest przez bardzo stabilny
generator w nadajniku. W procesie modulacji częstotliwość ta będzie się zmieniała proporcjonalnie do
wartości sygnału modulującego; dla wartości dodatnich sygnału modulującego, będą to zmiany do
wartości F
0
+
F, a dla ujemnych do wartości F
0
F. Maksymalna wielkość zmiany częstotliwości
fali nośnej
F nazywa się dewiacją częstotliwości. Aby modulacja częstotliwości była skuteczną,
częstotliwość fali nośnej powinna być przynajmniej 1000 większa od częstotliwości sygnału
modulującego. Wpraktyce modulację częstotliwości stosuje się na falach ultrakrótkich, powyżej 30
MHz.
f
F
F + f
max
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
15
Rys. 6.5.17
Przy założeniu, że w trakcie modulacji częstotliwość fali nośnej zmienia się okresowo według
zależności:
F = F
0
+
Fcos2
f t
Otrzymujemy zależność na prąd modulowany:
Po dokonaniu dość skomplikowanych przekształceń otrzymamy szereg wyrażeń określających
prądy składowe widma sygnału zmodulowanego częstotliwościowo. Widmo to podobnie jak przy
modulacji amplitudy posiada prążek o częstotliwości fali nośnej oraz dwie wstęgi boczne. Różnica
polega na tym, że w przypadku modulacji częstotliwości widmo to jest nieskończenie szerokie, jednak
współczynniki przy wyrazach wyższego rzędu szybko maleją i dzięki temu wyrazy te można pominąć.
Praktyczną szerokość widma (99% energii) można przedstawić wzorem:
B = 2(
F + f
max
)
gdzie f
max
- maksymalna częstotliwość w sygnale modulującym.
Na rys. 6.5.18 pokazano przebiegi dla modulacji częstotliwości: (a) to sygnał modulujący o
częstotliwości f, (b) to sygnał zmodulowany.
Rys. 6.5.18.
6.5.6. Modulacja fazy PM
Modulacja fazy polega na uzależnieniu kąta fazowego fali nośnej od wartości sygnału
modulującego. Przy modulacji fazy fali nośnej prostym tonem sinusoidalnym o częstotliwości f kąt
zmienia się okresowo według zależności:
=
0
+
sin 2
f
gdzie
określa maksymalną zmianę kąta fazowego i nazywa się dewiacją fazy. Prąd zmodulowany
fazowo będzie więc wyrażony wzorem:
i = I
m0
sin (2
F
0
t +
sin 2
f t +
0
)
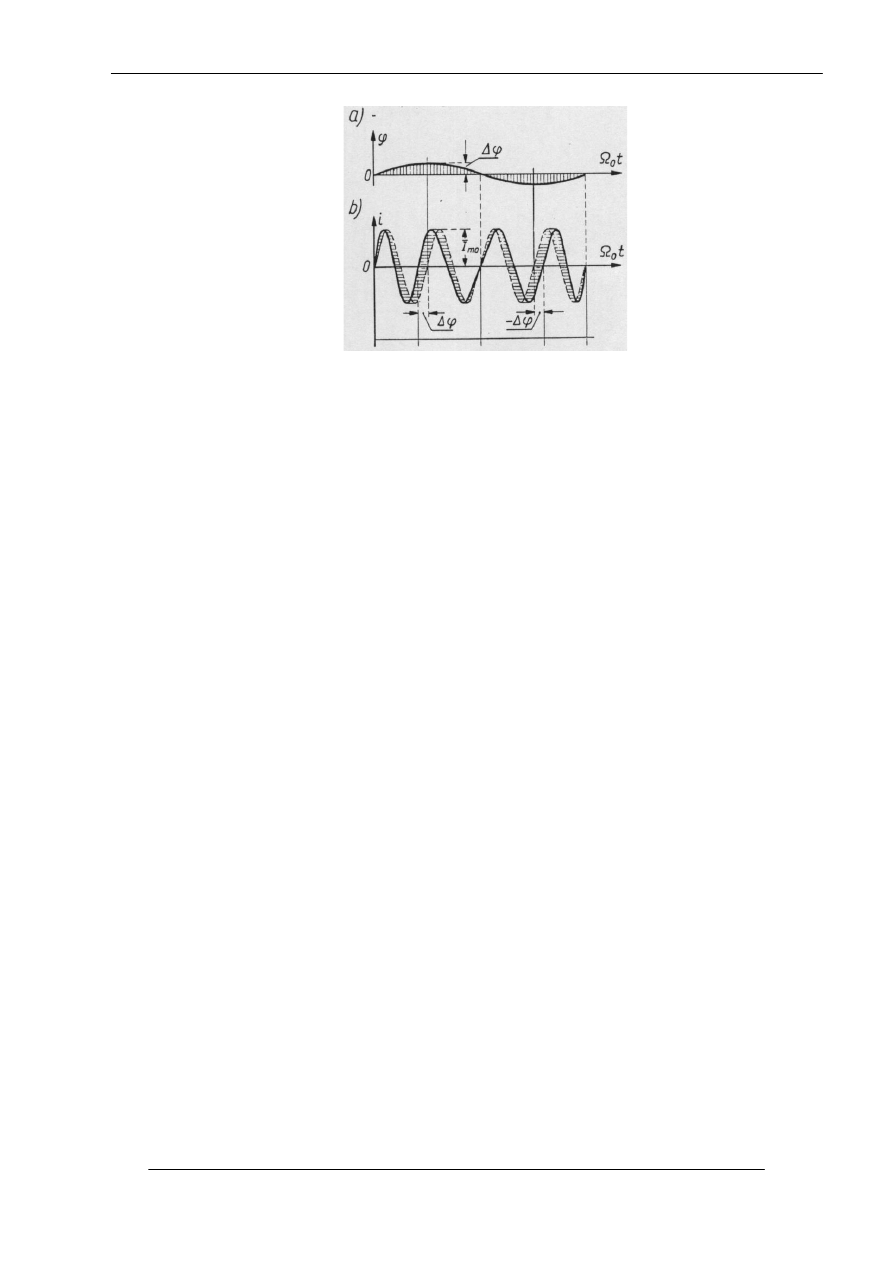
Na rys.6.5.19. przedstawiono ideę modulacji fazy.
f
F
gdzie
ft
t
F
I
i
m
)
2
sin
2
sin(
0
0
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
16
Rys.6.5.19.
Fragment (a) rysunku pokazuje zmiany kąta fazowego (proporcjonalne zmian wartości sygnału
modulującego), a fragment (b) pokazuje przebieg prądu zmodulowanego (linia ciągła). Linią
przerywaną zaznaczono przebieg prądu przed modulacją. Jak wynika z tego rysunku przy modulacji
fazowej zmienia się nie tylko kąt fazowy, lecz również i częstotliwość. Maksymalna zmiana
częstotliwości czyli dewiacja częstotliwości wynosi:
F =
f
Widzimy więc, że przy odpowiednim doborze parametrów modulacji, modulacja częstotliwości i
modulacja fazy dają te same wyniki. Dotyczy to jednak jedynie przypadku gdy sygnałami
modulującymi są sygnały sinusoidalne. W przypadku modulacji innymi sygnałami (trójkątny,
prostokątny itp.), modulacje te różnią się zasadniczo.
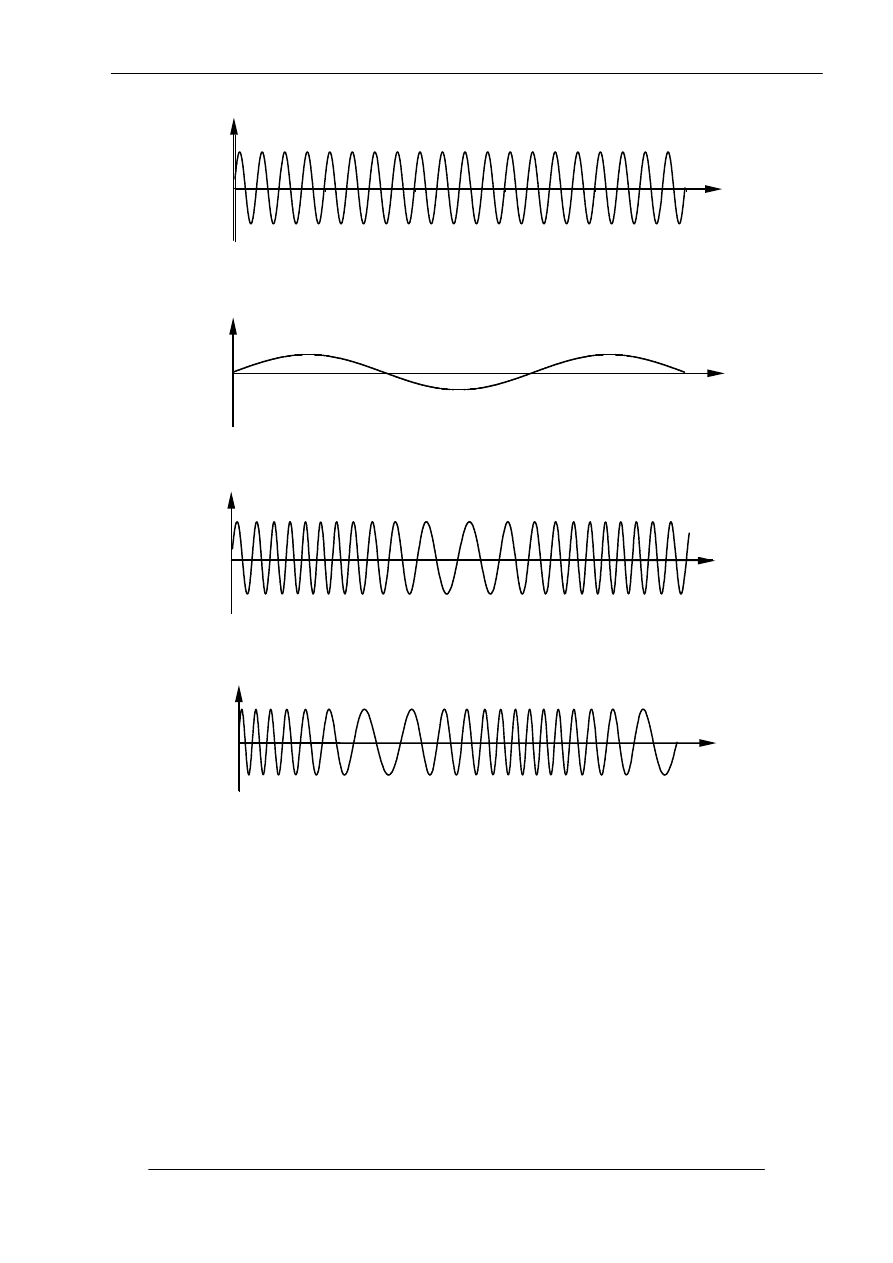
Na rys. 6.5.20. Przedstawiono sinusoidalny sygnał modulujący oraz wyniki modulacji
częstotliwości i fazy. Można zauważyć, że w obu przypadkach sygnały zmodulowane są identyczne.
Nastąpiło jedynie ich przesunięcie względem siebie. Przy modulacji częstotliwości maksymalne
zagęszczenie sygnału zmodulowanego występuje dla największej wartości sygnału modulującego, a
przy modulacji fazy występuje ono dla momentu przechodzenia wartości sygnału modulującego przez
zero w kierunku wartości rosnących.
Porównując modulację amplitudy z modulacją kątową można zauważyć dwie podstawowe zalety
tej ostatniej. Po pierwsze przy modulacji kątowej przenoszone jest szersze pasmo częstotliwości co
pozwala na wierniejsze przesyłanie sygnałów. Ma to szczególne znaczenie zwłaszcza dla sygnałów
muzycznych. Po drugie modulacja kątowa jest znacznie odporniejsza na zakłócenia. Większość
zakłóceń pojawiających się w trakcie transmisji ma charakter amplitudowy, tzn. nakładają się one na
amplitudę sygnału. Ponieważ przy modulacji amplitudy właśnie w zmianach amplitudy zapisana jest
informacja o sygnale, każde zakłócenie powoduje niepożądaną zmianę przesyłanego sygnału. Przy
modulacji kątowej zmiany amplitudy wywołane zakłóceniami nie mają wpływu na wartość sygnału,
ponieważ cała informacja zawarta jest w zmianach częstotliwości. Szkodliwe zmiany amplitudy
wywołane zakłóceniami mogą więc zostać usunięte za pomocą odpowiednich układów w odbiorniku.
6.5.7. Detekcja
Detekcja zwana również demodulacją jest procesem odwrotnym do modulacji. Polega ona na
odtworzeniu z sygnału zmodulowanego zapisanej w nim informacji. W zależności od sposobu
zastosowanej modulacji mamy detekcję amplitudy i detekcję częstotliwości stosowaną przy
demodulacji sygnałów zmodulowanych kątowo.
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
17
Rys.6.5.20.
6.5.8. Detekcja amplitudy
Sygnał zmodulowany amplitudowo posiada wartość średnią równą zeru. Doprowadzenie takiego
sygnału do głośnika nie spowoduje żadnych drgań membrany czyli nie usłyszymy głosu. Membrana
jest zbyt bezwładna by mogła drgać w takt bardzo wysokiej częstotliwości radiowej, a wskutek
zerowej wartości średniej nie ma innej siły, która by na nią oddziaływała. Detekcja amplitudy polega
na takim przekształceniu sygnału zmodulowanego, aby pojawiła się w nim wartość średnia
proporcjonalna do obwiedni, czyli do wartości sygnału modulującego. Można to uzyskać
przepuszczając odebrany sygnał zmodulowany przez diodę, która przewodząc prąd jednokierunkowo
pozostawi jedynie dodatnie połówki sygnału. Uzyskany w ten sposób przebieg posiada wartość
średnią o kształcie zbliżonym do obwiedni sygnału. Przedstawiono to na rys. 6.5.21.
Fala nośna
Sygnał modulujący
Sygnał zmodulowany częstotliwościowo
Sygnał zmodulowany fazowo
t
U
U
U
U
t
t
t
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
18
Rys. 6.5.21
Przebieg a przedstawia prąd w funkcji czasu przed detekcją, a przebieg b prąd po detekcji.
Detekcję amplitudy można realizować na szereg sposobów. Jeden z częściej spotykanych układów
detektora amplitudy przedstawiono na rys. 6.5.22.
Rys. 6.5.22
Na oporniku R pojawia się napięcie o kształcie takim jak prąd na rys. 6.5.21 b Wartość średnia
tego napięcia ma kształt zbliżony do obwiedni, ale nie identyczny. Aby uzyskać większą wierność
detekcji do opornika dołącza się równolegle kondensator C. Układ opornika z kondensatorem działa
podobnie jak układ prostownika jednopołówkowego. W momentach spadku napięcia sygnału do zera,
kondensator dzięki zgromadzonemu ładunkowi podtrzymuje je na poziomie obwiedni. Różnica w
stosunku do prostownika polega na tym, że w przypadku detektora stała czasowa RC musi być
dobrana optymalnie do maksymalnej częstotliwości w sygnale modulującym, tak by układ mógł
nadążać za zmianami obwiedni. Zbyt duża stałą czasowa powodowała by zniekształcenia sygnału
demodulowanego. Kondensator C
sz
ma za zadanie wyeliminowanie składowej stałej obecnej w
sygnale po detekcji. W rezultacie na wyjściu detektora otrzymuje się sygnał o takim samym kształcie
jak sygnał modulujący.
WE
R
C
WY
C
sz
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
19
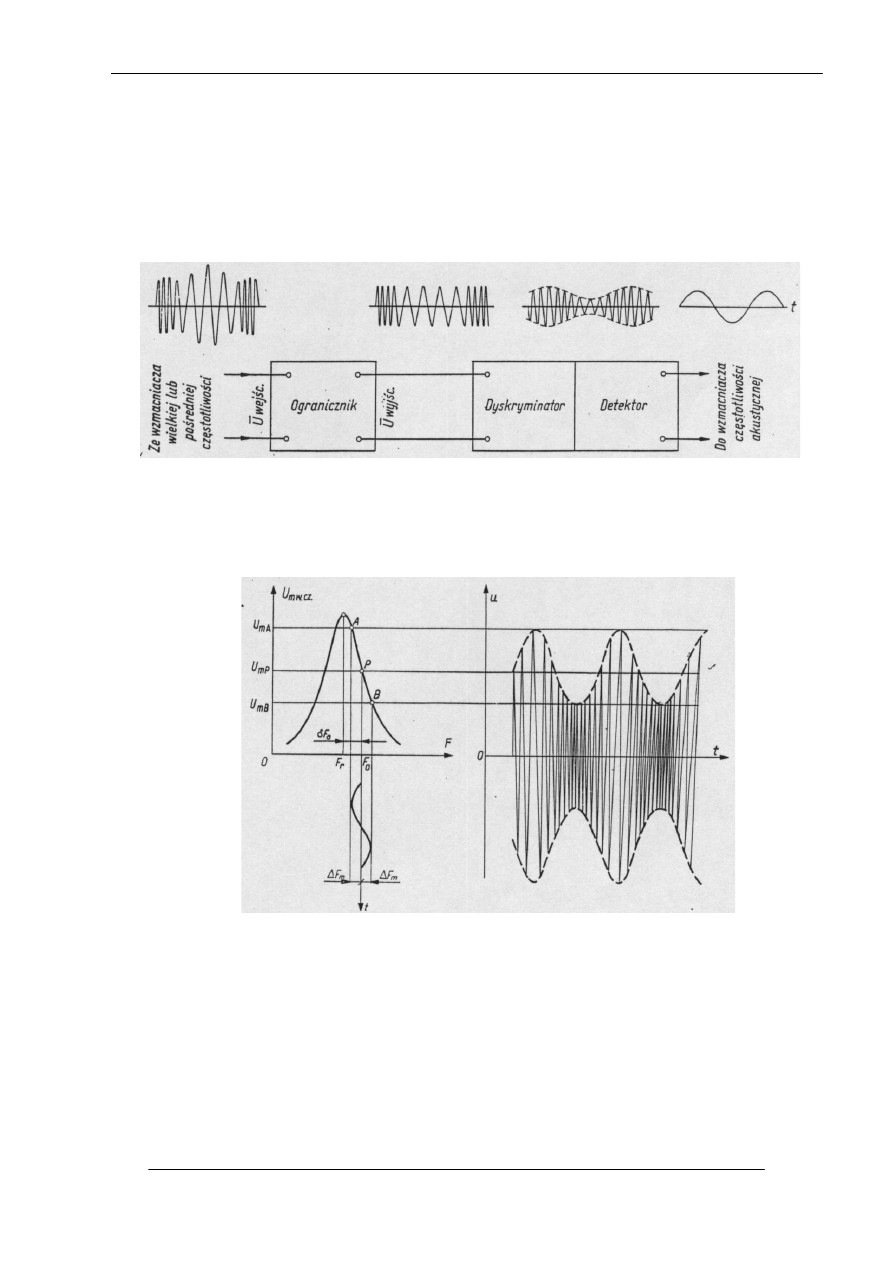
6.5.9. Detekcja częstotliwości
Zadaniem detektora częstotliwości jest przekształcenie odebranego napięcia o modulowanej
częstotliwości na napięcie o częstotliwości akustycznej. Układ detektora częstotliwości składa się z
trzech bloków: ogranicznika amplitudy, dyskryminatora i detektora amplitudy. Dyskryminator
i detektor zazwyczaj są połączone w jeden układ, jak pokazano na rys. 6.5.23. Na rysunku tym
pokazano również sygnały na wejściach i wyjściach poszczególnych bloków detektora częstotliwości.
Rys. 6.5.23
Zadaniem ogranicznika jest wyeliminowanie zakłóceń amplitudy, które pojawiają się w
trakcie transmisji sygnału. Ogranicznik działa w oparciu o odpowiednio spolaryzowaną diodę, która
obcina amplitudę sygnału na odpowiednio dobranym poziomie, pozostawiając bez zmian modulację
częstotliwości.
Rys. 6.5.24
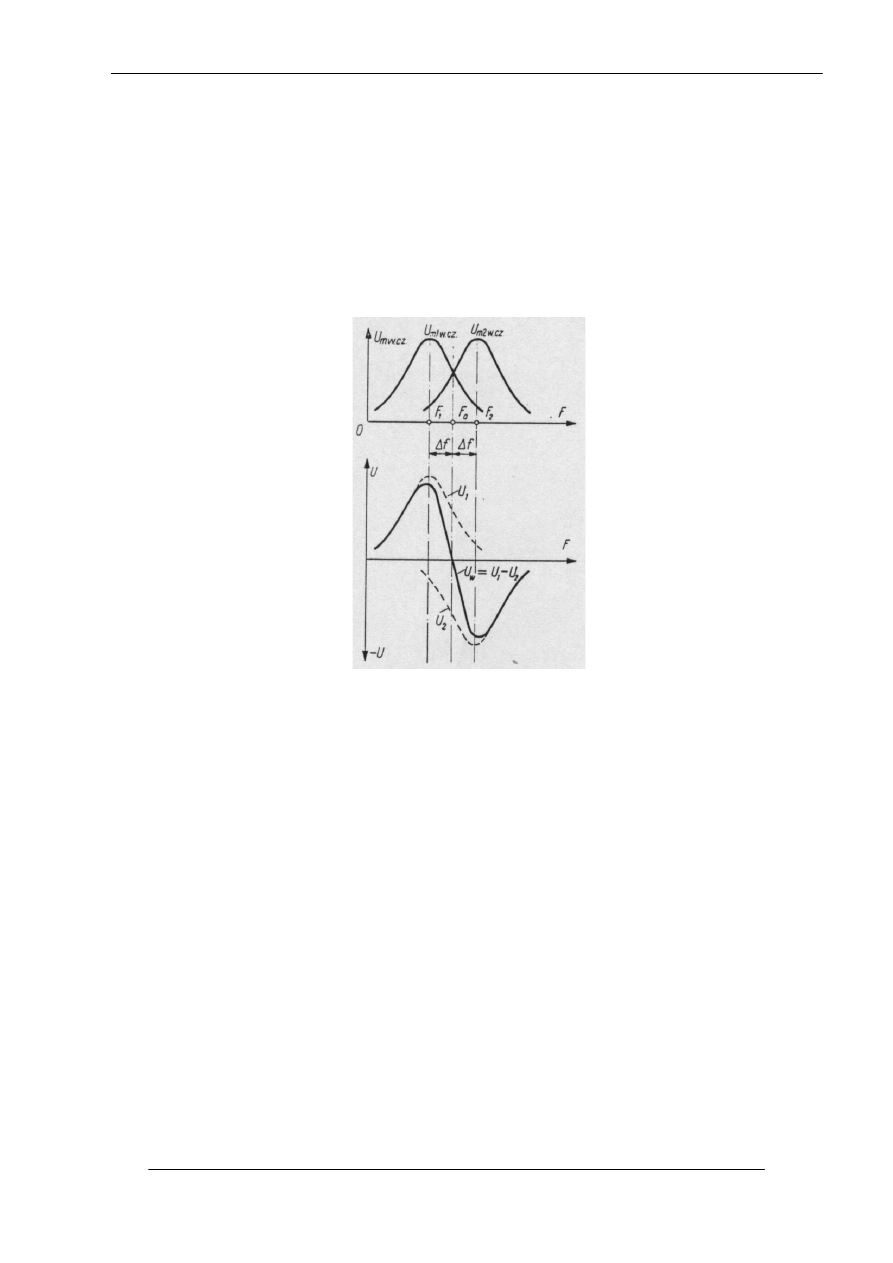
Zadaniem dyskryminatora jest przekształcenie sygnału o stałej amplitudzie i zmiennej
częstotliwości na sygnał o amplitudzie proporcjonalnej do częstotliwości, czyli zamiana sygnału z
modulacją częstotliwości na sygnał o zmodulowanej amplitudzie. Najprostszym dyskryminatorem
jest obwód rezonansowy pracujący na zboczu charakterystyki. Przy pracy na odcinku A–B zbocza
charakterystyki rezonansowej, który w przybliżeniu jest prostoliniowym, otrzymujemy zmiany
napięcia w przybliżeniu proporcjonalne do zmian częstotliwości. Punkt pracy P, odpowiadający
częstotliwości fali nośnej F
0
powinien znajdować się w środku prostoliniowego odcinka zbocza
charakterystyki, a wahania częstotliwości nośnej
F
m
nie powinny wykraczać poza jej część
prostoliniową. Omówioną zasadę pracy takiego dyskryminatora przedstawiono na rys. 6.5.24. W
rzeczywistości zbocze charakterystyki obwodu rezonansowego nie jest linią prostą, więc zmiany
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
20
amplitudy nie będą w pełni proporcjonalne do zmian częstotliwości, czyli pojawią się zniekształcenia
w procesie detekcji. Dlatego też rzeczywiste układy dyskryminatorów są bardziej skomplikowane.
Stosuje się w nich podwójne obwody rezonansowe o różnych częstotliwościach rezonansowych, tak
połączone, że otrzymuje się charakterystykę wypadkową będącą różnicą ich charakterystyk.
Przedstawiono to na rys. 6.5.25. Charakterystyka wypadkowa posiada długi odcinek prostoliniowy
pozwalający na przeprowadzenie procesu dyskryminacji bez zniekształceń.
Rys. 6.5.25
Zadaniem detektora jest przekształcenie sygnału zdemodulowanego amplitudowo,
uzyskanego po dyskryminatorze na sygnał akustyczny. Detektor stanowiący część układu detekcji
częstotliwości działa na tej samej zasadzie jak detektor amplitudy opisany w rozdziale 7.1. W
rezultacie na wyjściu detektora częstotliwości otrzymujemy ten sam sygnał, który został zapisany na
fali nośnej w trakcie modulacji.
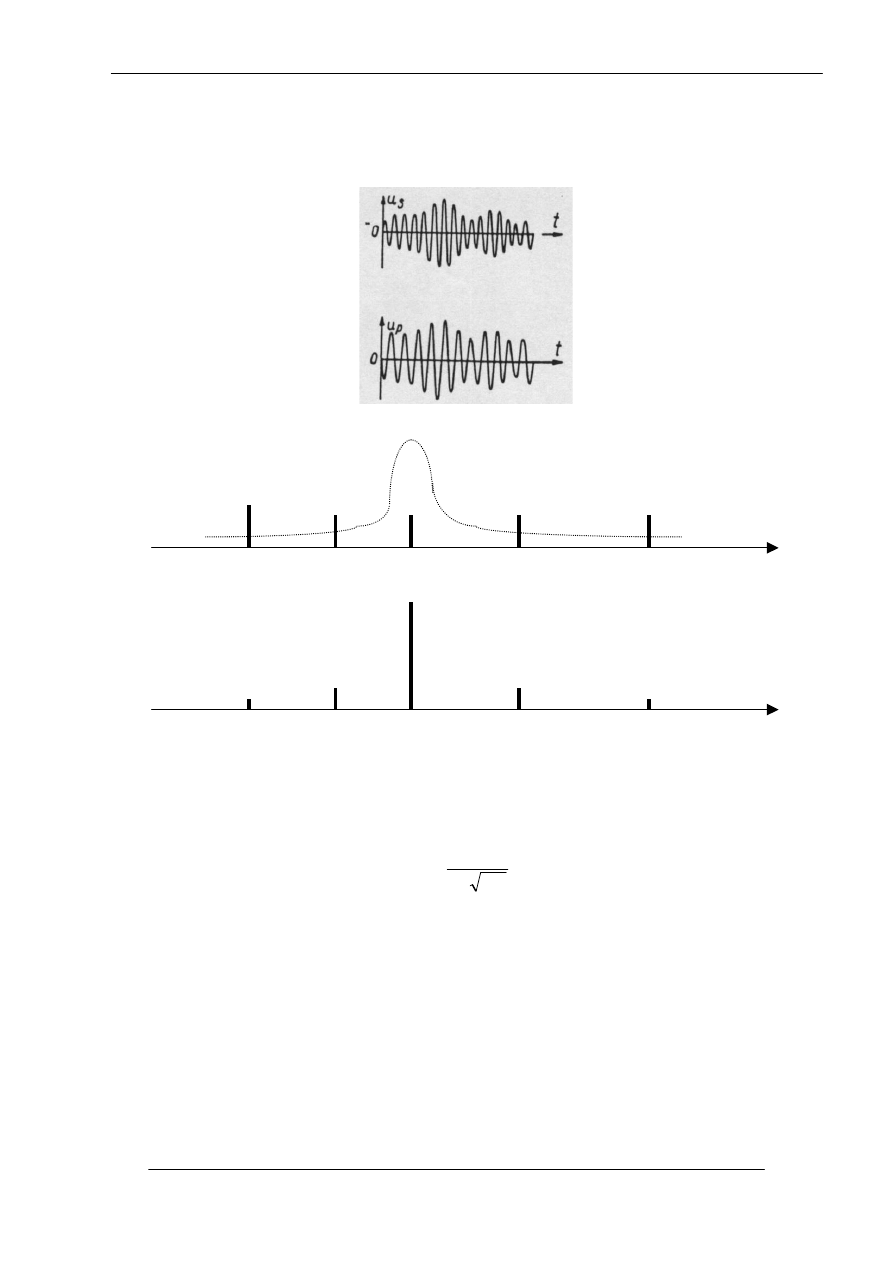
6.5.10. Przemiana częstotliwości
Przemiana częstotliwości polega na zamianie częstotliwości fali nośnej bez zmiany kształtu i
charakteru modulacji. Na rys. 6.5.26 pokazano sygnał zmodulowany amplitudowo przed i po
przemianie częstotliwości. Oczywiście można dokonywać również przemiany częstotliwości dla
sygnałów z modulacją częstotliwości. Wówczas zmieni się częstotliwość nominalna fali nośnej, F
0
a
bez zmiany pozostaną jej zmiany
F czyli dewiacja częstotliwości. Jest wiele powodów stosowania
przemiany częstotliwości. Najistotniejsze z nich to:
Umożliwienie wzmocniania sygnałów odebranych z różnych stacji na jednej częstotliwości
pośredniej (radio, telewizja itp.),
Umożliwienie niezakłócone transmisji sygnałów przy pomocy radiolinii,
Radykalne obniżenie częstotliwości dla umożliwienia przesyłania i wzmacniania sygnałów za
pomocą konwencjonalnych urządzeń.
Omówimy pokrótce powody stosowania przemiany częstotliwości. Pierwszy z powodów
sprowadza się do tego ,że w antenie odbiornika pojawiają się sygnały z wielu stacji o różnych
częstotliwościach: F
1
, F
2
, F
3
, ...F
n
, przy zbliżonych do siebie poziomach napięcia. W celu wybrania
jednej stacji, z anteną sprzężony jest obwód rezonansowy o regulowanej pojemności. Dzięki
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
21
charakterystyce rezonansowej obwodu, poziomy napięć na wyjściu zostaną zróżnicowane; dla
wybranej stacji uzyskuje się wysoki poziom napięcia, a dla pozostałych stacji napięcia zostaną
stłumione. Im bardziej częstotliwość danej stacji różni się od częstotliwości stacji wybranej tym
większe tłumienie sygnału. Przedstawiono to na rys. 6.5.27.
Rys. 6.5.26
Rys. 6.5.27
W części a rysunku pokazano poziom sygnałów w antenie, a w części b poziom sygnałów na
wjściu obwodu rezonansowego. Aby dostroić się do żądanej stacji np. F
3
, należy tak dobrać
pojemność w obwodzie rezonansowym, by częstotliwość rezonansowa obwodu F
0
była równa
częstotliwości stacji F
3
.
Jak wynika z rys. 6.5.27 na wyjściu obwodu rezonansowego mamy wyraźnie wyróżniony sygnał
wybranej stacji, ale istnieją również, wprawdzie stłumione, sygnały stacji niepożądanych. Dlatego też
w dalszym procesie wzmocnienia muszą być stosowane wzmacniacze selektywne nastrojone na
częstotliwość wybranej stacji. Im większa będzie ilość stopni takiego wzmacniacza, tym większe
będzie tłumienie sygnałów niepożądanych w stosunku do sygnału wybranej stacji. W wysokiej klasy
odbiornikach spotyka się nawet wzmacniacze dziesięcio stopniowe. W przypadku zmiany odbieranej
stacji należało by więc zmienić nie tylko pojemność w rezonansowym obwodzie wejściowym, ale
również przestroić wszystkie stopnie wzmacniacza na nową częstotliwość. Czynność ta była by na tyle
uciążliwa, że praktycznie niewykonalna. Dlatego pomiędzy obwodem wejściowym a wzmacniaczem
wstawia się układ przemiany częstotliwości. W układzie tym zamieniana jest częstotliwość
odbieranego sygnału F
1
, F
2
, F
3
, ...F
n
, na ściśle określoną, stałą dla danego odbiornika, częstotliwość
zwaną częstotliwością pośrednią F
P
. Dzięki temu wszystkie stopnie wzmacniacza mogą być teraz
nastrojone raz na zawsze na tą właśnie częstotliwość.
3
0
2
1
F
LC
F
a)
f
F
1
F
2
F
3
F
4
F
5
b)
f
F
1
F
2
F
3
F
4
F
5
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
22
Drugi z powodów stosowania przemiany częstotliwości wiąże się z transmisją sygnałów,
zwłaszcza w zakresie VHF. Ponieważ fale radiowe w tym zakresie częstotliwości rozchodzą się po
liniach prostych, więc zasięg odbioru ogranicza się, w zależności od wysokości anten i ukształtowania
terenu do 60 – 100 km. Jeśli zachodzi konieczność przesłania sygnału na większą odległość, na trasie
przesyłu umieszcza się łańcuch stacji przekaźnikowych. Każda taka stacja składa się z odbiornika i
nadajnika. Pomiędzy nadajnikiem a odbiornikiem musi nastąpić przemiana częstotliwości, by sygnał
był nadawany na innej częstotliwości niż został odebrany. Gdyby nie zastosowano przemiany to do
odbiorników radiowych czy telewizyjnych znajdujących się między dwoma stacjami
przekaźnikowymi docierałyby, na tej samej częstotliwości, dwa przesunięte w czasie sygnały
powodując wskutek nakładania się zakłócenia interferencyjne odbioru.
Z trzecim z powodów stosowania przemiany częstotliwości mamy do czynienia np. w radarach.
Zasada pracy radaru polega najogólniej na tym, że obracająca się antena wysyła bardzo zogniskowaną
wiązkę sygnałów. Sygnały te natrafiając na jakąś przeszkodę odbijają się od niej i powracają do
anteny. Czas mierzony od momentu wysłania sygnału do jego powrotu określa odległość od
przeszkody, a kąt ustawienia anteny względem północy w momencie odbioru określa namiar na tą
przeszkodę. Z teorii budowy anten wynika, że aby uzyskać dobre zogniskowanie wiązki, a więc
właściwą rozdzielczość obrazu radarowego, wymiary liniowe anteny powinny być przynajmniej 100
razy większe od długości nadawanej fali. Ponieważ anteny na statkach nie mogą być zbyt duże,
dlatego należy stosować bardzo krótkie fale, czyli bardzo wysokie częstotliwości. W radarach
morskich stosowane są częstotliwości w granicach 3 – 10 GHz. Sygnał o takiej wysokiej
częstotliwości jest więc wysyłany i powraca jako odbite echo. Poziom powracającego sygnału jest na
tyle niski, że aby poddać go dalszej obróbce musi on być najpierw odpowiednio wzmocniony.
Problemem jest to, że konwencjonalne tranzystory, czy układy scalone nie nadają się do pracy przy
tak wysokich częstotliwościach. Również sygnałów o takich częstotliwościach nie można przesyłać
zwykłymi kablami, muszą być stosowane do tego drogie, o dużych wymiarach falowody. Aby uniknąć
tych kłopotów, bezpośrednio po odebraniu powracającego sygnału, jego częstotliwość jest obniżana
kilkaset razy do wartości 50 – 60 MHz. Przesyłanie i wzmacnianie sygnałów o takiej częstotliwości
nie sprawia już żadnych kłopotów.
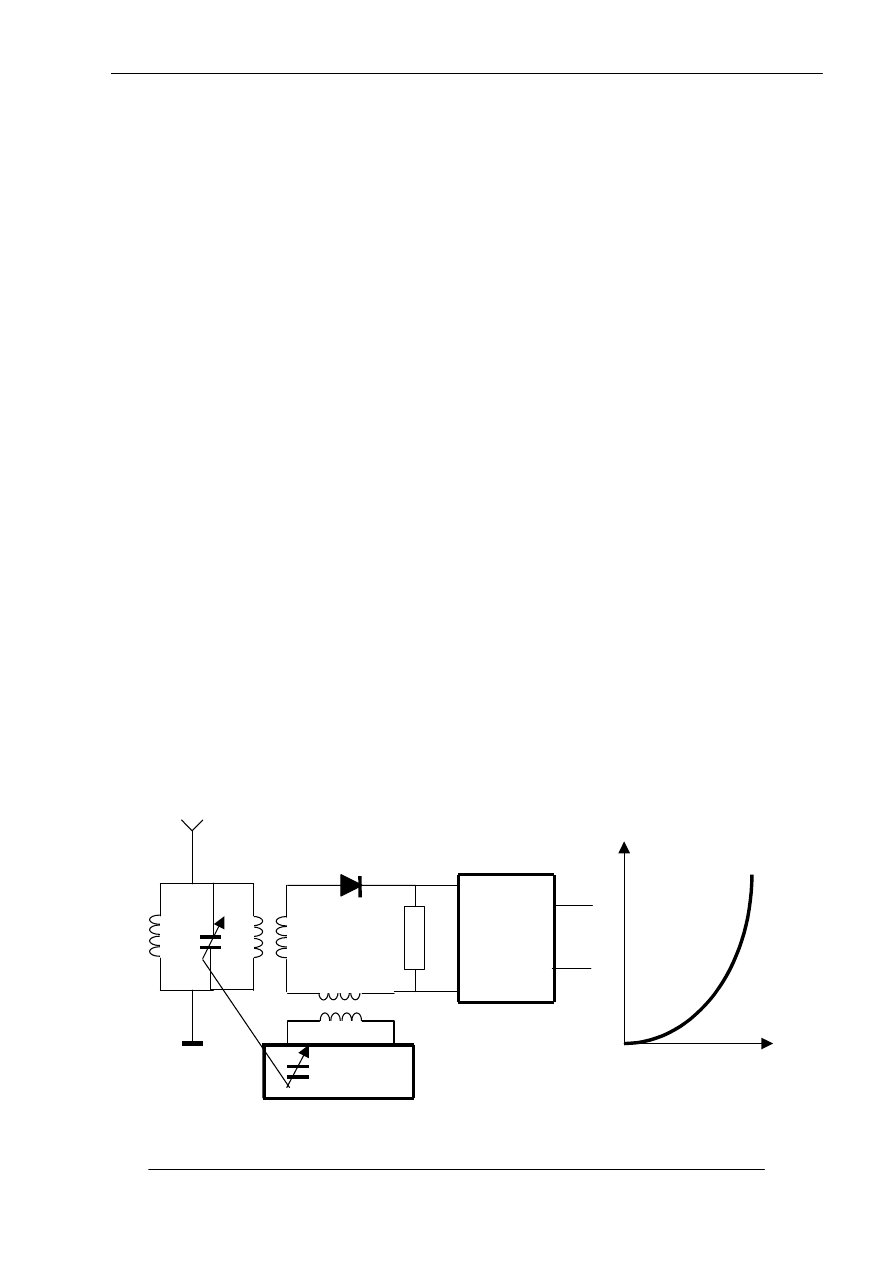
Jest wiele metod realizowania przemiany częstotliwości. Omówiona zostanie tu tzw. przemiana
sumacyjna. Aby dokonać przemiany częstotliwości tym sposobem, do jednego, wspólnego
obwodu wprowadza się dwa sygnały; odebrany sygnał o częstotliwości F
s
, oraz sygnał z
generatora lokalnego, zwanego heterodyną o częstotliwości F
h
. W obwodzie tym musi znajdować
się element nieliniowy np. dioda. W rezultacie w obwodzie powstanie szereg sygnałów o różnych
częstotliwościach, będących kombinacjami częstotliwości F
s
i F
h
. Pożądany sygnał o
częstotliwości, będącej różnicą F
h
– F
s
wybierany jest za pomocą filtru pasmowego nastrojonego
na tą właśnie częstotliwość. Schemat układu przemiany częstotliwości przedstawiono na rys. 6.5.28.
Na rys. 6.5.29 przedstawiono z kolei charakterystykę diody, stanowiącej element nieliniowy.
Rys. 6.5.28 Rys. 6.5.29
i
FILTR
PASMOWY
R
U
wy
HETERO
DYNA
u
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
23
W obwodzie pojawia się suma napięć sygnału:
oraz heterodyny
napięcie wypadkowe będzie więc równe:
Zakładając, że charakterystyka diody jest w przybliżeniu parabolą, prąd płynący przez diodę
będzie równy:
stosując znane zależności trygonometryczne:
otrzymamy po przekształceniach:
Jak wynika z ostatniego wyrażenia prąd płynący przez diodę oprócz składowej stałej, składowe
zmienne o częstotliwościach:
Prąd ten przepływając przez opornik R wytworzy na nim, zgodnie z prawem Ohma
proporcjonalne napięcia. Filtr pasmowy dołączony do opornika jest nastrojony na częstotliwość
różnicową F
h
- F
s
, więc jedynie sygnał o tej częstotliwości pojawi się na wyjściu filtra.
Amplituda napięcia z heterodyny jest wartością stałą, można więc oznaczyć:
w rezultacie czego otrzymamy:
Napięcie to jest tak samo zmodulowane jak napięcie sygnału, różni się od niego jedynie
częstotliwością. Heterodyna jest generatorem typu LC , jej częstotliwość można więc zmieniać za
pomocą kondensatora C. Kondensator ten jest sprzężony mechanicznie z kondensatorem w obwodzie
wejściowym tak, że przy zmianie częstotliwości odbieranej stacji, zmienia się równocześnie
częstotliwość heterodyny. W rezultacie częstotliwość różnicowa zwana częstotliwością pośrednią
będzie wielkością stałą:
F
p
= F
h
– F
s
= const.
6.6 Literatura
1. Rusek M., Pasierbiński J., Elementy i układy elektroniczne w pytaniach i
odpowiedziach, WNT 1997.
2. Koziej E., Sochoń B., Elektrotechnika i elektronika, Warszawa 1986.
3. Przeździecki F., Elektrotechnika i elektronika, Warszawa, PWN 1985.
t
F
U
t
U
u
s
ms
s
ms
s
2
cos
cos
t
F
U
t
U
u
h
mh
h
mh
h
2
cos
cos
t
U
t
U
u
u
u
h
mh
s
ms
h
s
cos
cos
1
t
t
U
aU
t
aU
t
aU
t
U
t
U
a
au
i
h
s
mh
ms
h
mh
s
ms
h
mh
s
ms
cos
cos
2
cos
cos
)
cos
cos
(
2
2
2
2
2
2
1
)
cos(
2
1
)
cos(
2
1
cos
cos
2
1
2
cos
cos
2
oraz
t
aU
t
aU
aU
aU
i
h
mh
s
ms
mh
ms
2
cos
2
2
cos
2
2
2
2
2
2
2
t
U
aU
t
U
aU
s
h
mh
ms
s
h
mh
ms
)
cos(
)
cos(
s
h
s
h
h
s
F
F
F
F
F
F
2
2
t
U
aRU
u
s
h
ms
mh
wy
)
cos(
k
aRU
mh
t
kU
u
s
h
ms
wy
)
cos(

Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
24
4. Elektrotechnika i elektronika dla nieelektryków, Praca zbiorowa, WNT 2006.
5. Jaczewski J., Opolski A., Stolz J., Podstawy elektroniki i energoelektroniki, WNT 1981.
6. Pilawski M., Podstawy elektrotechniki, WSiP 1982.
7. Rusek A., Podstawy elektroniki, WSiP 1989.
8. Stacewicz T., Kotlicki A., Elektronika w laboratorium naukowym, PWN 1994.
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
25
6.7 Efekty kształcenia
Metody i kryteria oceny
EK1
Ma podstawową wiedzę w zakresie pojęć, praw z zakresu elektrotechniki
i elektroniki.
Metody oceny
egzamin pisemny, egzamin ustny, sprawdziany i prace kontrolne w
semestrze.
Kryteria/ Ocena
2
3
3,5 - 4
4,5 - 5
Kryterium 1
Wiedza w
zakresie pojęć
elektrotechniki i
elektroniki.
Brak lub
niewystarczają
ca
podstawowa
wiedza w
zakresie pojęć
i definicji
związanych z
tematem.
Opanowana
podstawowa
wiedza w
zakresie pojęć i
definicji
związanych z
tematem.
Zna i potrafi
scharakteryzować
/omówić
podstawowe
pojęcia i definicje
Zna i potrafi
scharakteryzować
/omówić
podstawowe i
rozszerzone
pojęcia, definicje.
Zna i potrafi
przeanalizować
pojęcia i definicje
oraz wskazać
możliwości ich
wykorzystania w
technice morskiej
Biegle zna i
potrafi
przeanalizować
oraz wskazać
możliwości
wykorzystania w
technice
morskiej.
Kryterium 2
Wiedzę w
zakresie praw
elektrotechniki i
elektroniki.
Brak lub
niewystarczają
ca
podstawowa
wiedza w
zakresie praw
związanych z
tematem.
Opanowana
podstawowa
wiedza w
zakresie praw
związanych z
tematem.
Zna i potrafi
scharakteryzować
/omówić
podstawowe
prawa
Zna i potrafi
scharakteryzować
/omówić
podstawowe i
rozszerzone
prawa.
Zna i potrafi
przeanalizować
prawa oraz
wskazać
możliwości ich
wykorzystania w
technice morskiej
Biegle zna i
potrafi
przeanalizować
oraz wskazać
możliwości
wykorzystania w
technice
morskiej.
EK2
Posiada umiejętność wykorzystania podstawowych praw elektrotechniki
i elektroniki do analizy rachunkowej podstawowych elementów i
obwodów elektronicznych.
Metody oceny
zaliczenie ćwiczeń, laboratoriów/ symulatorów, sprawozdanie/ raport.
Kryteria/ Ocena
2
3
3,5 - 4
4,5 - 5
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
26
Kryterium 1
Umiejętność
wykorzystania
podstawowych
praw
elektrotechniki i
elektroniki do
analizy
rachunkowej
podstawowych
elementów i
obwodów
elektronicznych.
Brak lub
niewystarczają
ca
podstawowa
wiedza w
zakresie
wykorzystania
pojęć, definicji
i praw
związanych z
tematem.
Opanowana
podstawowa
wiedza w
zakresie
wykorzystania
pojęć, definicji
i praw
związanych z
tematem.
Zna i potrafi
wykorzystać
podstawowe
pojęcia, definicje i
prawa do analizy
podstawowych
obwodów
Zna i potrafi
wykorzystać
podstawowe i
pochodne pojęcia,
definicje i prawa
do analizy
podstawowych
obwodów w
technice morskiej.
Zna i potrafi
wykorzystać
podstawowe i
pochodne
pojęcia, definicje
i prawa oraz
wzajemne
zależności między
nimi w technice
morskiej
Biegle zna i
potrafi
przeanalizować
oraz wskazać
możliwości
wykorzystania w
technice
morskiej.
EK3
Ma podstawową wiedzę teoretyczną w zakresie struktury,
przetwarzania, transmisji i pomiarów sygnałów elektrycznych.
Metody oceny
egzamin pisemny, egzamin ustny, sprawdziany i prace kontrolne w
semestrze.
Kryteria/ Ocena
2
3
3,5 - 4
4,5 - 5
Kryterium 1
Podstawowa
wiedza
teoretyczna w
zakresie
struktury,
przetwarzania,
transmisji i
pomiarów
sygnałów
elektrycznych.
Brak lub
niewystarczają
ca
podstawowa
wiedza w
zakresie
struktury,
przetwarzania,
transmisji i
pomiarów
sygnałów.
Opanowana
podstawowa
wiedza w
zakresie
struktury,
przetwarzania,
transmisji i
pomiarów
sygnałów.
Zna i potrafi
scharakteryzować
/omówić
podstawowe
pojęcia z zakresu
struktury,
przetwarzania,
transmisji i
pomiarów
sygnałów
Zna i potrafi
scharakteryzować
/omówić
podstawowe i
rozszerzone
pojęcia z zakresu
struktury,
przetwarzania,
transmisji i
pomiarów
sygnałów
występujących w
technice morskiej.
Zna i potrafi
przeanalizować
pojęcia z zakresu
struktury,
przetwarzania,
transmisji i
pomiarów
sygnałów
występujących w
technice morskiej
Biegle zna i
potrafi
przeanalizować
pojęcia z zakresu
struktury,
przetwarzania,
transmisji i
pomiarów
sygnałów
występujących w
technice
morskiej.
EK4
Posiada umiejętności pomiarów, analizy i przetwarzania sygnałów
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
27
elektrycznych.
Metody oceny
zaliczenie ćwiczeń, laboratoriów/ symulatorów, sprawozdanie/ raport.
Kryteria/ Ocena
2
3
3,5 - 4
4,5 - 5
Kryterium 1
Umiejętności
pomiarów,
analizy i
przetwarzania
sygnałów
elektrycznych.
Brak lub
niewystarczają
ce
podstawowe
umiejętności
w zakresie
pomiarów,
analizy i
przetwarzania
sygnałów.
Opanowane
podstawowe
umiejętności
w zakresie
pomiarów i
analizy
sygnałów.
Opanowane
podstawowe
umiejętności w
zakresie
pomiarów, analizy
i przetwarzania
sygnałów
Opanowane w
stopniu dobrym
podstawowe
umiejętności w
zakresie
pomiarów, analizy
i przetwarzania
sygnałów
występujących w
technice morskiej.
Opanowane w
stopniu bardzo
dobrym
podstawowe
umiejętności w
zakresie
pomiarów,
analizy i
przetwarzania
podstawowych
sygnałów
występujących w
technice morskiej
Biegle zna i
potrafi
przeanalizować
pojęcia z zakresu
pomiarów,
analizy i
przetwarzania
złożonych
sygnałów
występujących w
technice
morskiej.
EK5
Ma podstawową wiedzę w zakresie zasad działania, budowy,
eksploatacji podstawowych obwodów i urządzeń elektronicznych.
Metody oceny
egzamin pisemny, egzamin ustny, sprawdziany i prace kontrolne w
semestrze.
Kryteria/ Ocena
2
3
3,5 - 4
4,5 - 5
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
28
Kryterium 1
Wiedza w
zakresie zasad
działania,
budowy,
eksploatacji
podstawowych
obwodów i
urządzeń
elektronicznych.
Brak lub
niewystarczają
ca
podstawowa
wiedza w
zakresie zasad
działania,
budowy,
eksploatacji
podstawowyc
h obwodów i
urządzeń.
Opanowana
podstawowa
wiedza w
zakresie zasad
działania,
budowy,
eksploatacji
podstawowyc
h obwodów i
urządzeń.
Zna i potrafi
scharakteryzować
/omówić
podstawowe i
rozszerzone
pojęcia z zakresu
zasad działania,
budowy,
eksploatacji
podstawowych
obwodów i
urządzeń.
Zna i potrafi
przeanalizować
pojęcia z zakresu
zasad działania,
budowy,
eksploatacji
podstawowych
obwodów i
urządzeń
Biegle zna i
potrafi
przeanalizować
pojęcia z zakresu
zasad działania,
budowy,
eksploatacji
podstawowych
obwodów i
urządzeń
występujących w
technice
morskiej.
EK6
Posiada umiejętność analizy działania, pomiaru parametrów oraz
wyznaczania charakterystyk podstawowych obwodów i urządzeń
elektronicznych.
Metody oceny
zaliczenie ćwiczeń, laboratoriów/ symulatorów, sprawozdanie/ raport.
Kryteria/ Ocena
2
3
3,5 - 4
4,5 - 5
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
29
Kryterium 1
Umiejętność
analizy działania,
pomiaru
parametrów oraz
wyznaczania
charakterystyk
podstawowych
obwodów i
urządzeń
elektronicznych.
Brak lub
niewystarczają
ce
podstawowe
umiejętności
w zakresie
analizy
działania,
pomiaru
parametrów
oraz
wyznaczania
charakterystyk
.
Opanowane
podstawowe
umiejętności
w zakresie
analizy
działania i
pomiaru
parametrów
podstawowyc
h obwodów i
urządzeń.
Opanowane
podstawowe
umiejętności w
zakresie analizy
działania, pomiaru
parametrów oraz
wyznaczania
charakterystyk
podstawowych
obwodów i
urządzeń
Opanowane w
stopniu dobrym
podstawowe
umiejętności w
zakresie analizy
działania, pomiaru
parametrów oraz
wyznaczania
charakterystyk
podstawowych
obwodów i
urządzeń.
Opanowane w
stopniu bardzo
dobrym analizy
działania,
pomiaru
parametrów oraz
wyznaczania
charakterystyk
podstawowych
obwodów i
urządzeń
Biegle
opanowane
umiejętności w
zakresie analizy
działania,
pomiaru
parametrów oraz
wyznaczania
charakterystyk
podstawowych
obwodów i
urządzeń
występujących w
technice
morskiej.
6.8. Szablon sprawozdania
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
30
U
n
[V]
f
n
[kHz]
U
s
[V]
f
s
[kHz]
Kształt sygn. modulującego
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
31
U
n
[V]
f
n
[kHz]
U
s
[V]
f
s
[kHz]
Kształt sygn. modulującego
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
32
U
n
[V]
f
n
[kHz]
U
s
[V]
f
s
[kHz]
Kształt sygn. modulującego
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
33
U
n
[V]
f
n
[kHz]
U
s
[V]
f
s
[kHz]
Kształt sygn. modulującego
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
34
U
n
[V]
f
n
[kHz]
U
s
[V]
f
s
[kHz]
Kształt sygn. modulującego
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
35
f
s
[kHz]
f
n1
[kHz]
f
n2
[kHz]
f
n3
[kHz]
f
n
[kHz]
f
s1
[kHz]
f
s2
[kHz]
f
s3
[kHz]
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
36
U
n
[V]
f
n
[kHz]
U
s
[V]
f
s
[kHz]
m
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
37
U
n
[V]
f
n
[kHz]
U
s
[V]
f
s
[kHz]
m
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
38
U
n
[V]
f
n
[kHz]
U
s
[V]
f
s
[kHz]
m
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
39
U
n
[V]
f
n
[kHz]
U
s
[V]
f
s
[kHz]
Kształt sygn. modulującego
d
ff
[rad]
d
fc
F [rad/s]
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
40
U
n
[V]
f
n
[kHz]
U
s
[V]
f
s
[kHz]
Kształt sygn. modulującego
d
ff
[rad]
d
fc
F [rad/s]
Elektrotechnika i Elektronika Ćwiczenie nr 6 – Modulacja i detekcja
41
U
n
[V]
f
n
[kHz]
U
s
[V]
f
s
[kHz]
Kształt sygn. modulującego
d
ff
[rad]
d
fc
F [rad/s]
Wyszukiwarka
Podobne podstrony:
Fizyka 0 wyklad organizacyjny Informatyka Wrzesien 30 2012
pmp wykład podmioty 2011 2012
Cukrzyca ciężarnych 2012 spec anestetyczki
KOMPLEKSY POLAKOW wykl 29 03 2012
Biotechnologia zamkniete użycie (2012 13)
Alergeny ukryte Sytuacja prawna w Polsce i na Świecie E Gawrońska Ukleja 2012
NIEDOKRWISTOŚCI SEM 2011 2012
ANALIZA RYNKU NIERUCHOMOŚCI KOMERCYJNYCH W KRAKOWIE W LATACH 2008 2012
Niewydolność krążenia 2012
13 04 2012 TEST KOŃCOWY GASTROLOGIAid 14559 ppt
Wykład VIII 03 04 2012
wyklad 2012 10 25 (Struktury systemów komputerowych)
więcej podobnych podstron