Hydrauliczne i Pneumatyczne Układy Automatyki
Laboratorium 5
Dział:
Pneumatyczne układy sterowania dławieniowego
Temat:
Pneumatyczne i elektropneumatyczne ustawniki pozycyjne
Cel:
Zapoznanie się z konstrukcją i określenie właściwości serwomechanizmów
pneumatycznych
1 Wprowadzenie
Ustawnik pozycyjny lub pozycjoner to pojęcia używane często zamiennie. Stosuje się je do
określenia urządzenia sterującego przeznaczonego do współpracy z elementem wykonawczym.
Najważniejszymi elementami, które można wyróżnić w konstrukcji pozycjonerów pneumatycznych
to blok zaworowy i element sprzężenia zwrotnego służący do pomiaru położenia liniowego lub
kątowego elementu wykonawczego. Wśród pneumatycznych ustawników pozycyjnych można
wyróżnić urządzenia czysto pneumatyczne oraz konstrukcje elektropneumatyczne o różnym stopniu
złożoności. Pneumatyczny liniowy lub kątowy napęd pozycjonujący obejmuje w swej konstrukcji
pozycjoner oraz siłownik lub silnik pneumatyczny.
1.1 Pneumatyczny liniowy napęd pozycjonujący [1]
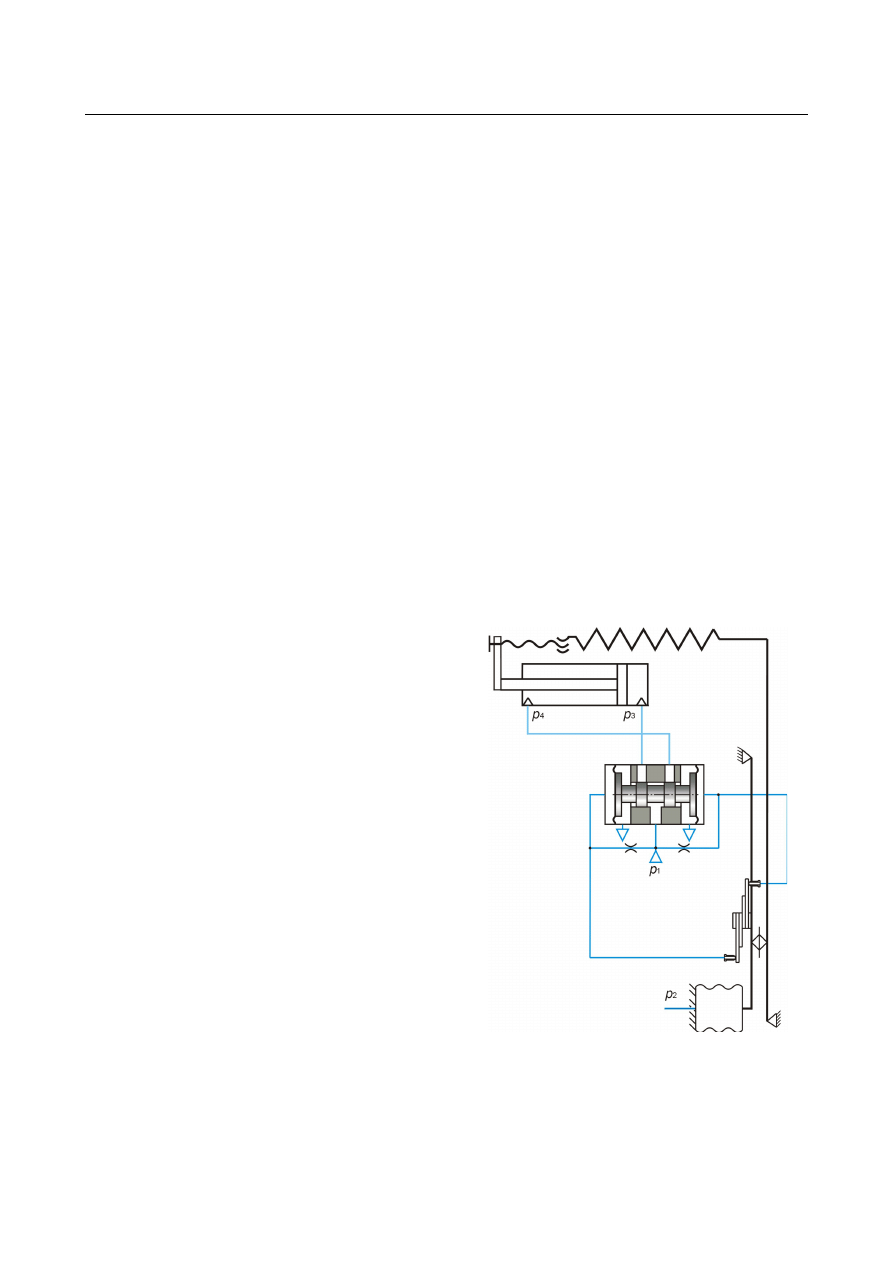
Działanie pneumatycznego ustawnika
pozycyjnego można prześledzić na schemacie
z rysunku 1. Urządzenie składa się z siłownika
pneumatycznego oraz pozycjonera pneumatycznego.
Pozycjoner pneumatyczny zbudowano w oparciu
o zawór proporcjonalny sterowany przez układ
kaskad pneumatycznych.
Ciśnienia na krawędziach sterujących zaworu
proporcjonalnego zależą od położenia układu
dźwigni mechanicznych wspartych z jednej strony
mieszkiem pneumatycznym a z drugiej strony
sprężyną pełniącą rolę sprzężenia z tłoczyskiem
siłownika. Zmiana ciśnienia p
2
w mieszku
pneumatycznym powoduje wyprowadzenie układu
dźwigni z równowagi co prowadzi do zróżnicowania
ciśnień na lewej i prawej krawędzi sterującej zaworu
1
Rys. 1. Schemat ilustrujący zasadę działania
pneumatycznego ustawnika pozycyjnego

Hydrauliczne i Pneumatyczne Układy Automatyki
Laboratorium 5
proporcjonalnego. Siła wypadkowa działająca na suwak zaworu powoduje jego przesunięcie co
w konsekwencji prowadzi do podania zasilania na jedną z komór siłownika i odpowietrzanie
drugiej z nich. Siłownik przemieszcza zmieniając siłę naciągu sprężyny do momentu
zrównoważenia siły reakcji wywołanej przez mieszek pneumatyczny.
Zastosowanie w liniowym napędzie pozycyjnym układu kaskad pneumatycznych powoduje,
że układ zużywa cały czas pewną część sprężonego powietrza pomimo, że siłownik nie wykonuje
żadnej pracy.
1.2 Elektropneumatyczny napęd pozycjonujący [2]
Znajdujący się na wyposażeniu laboratorium elektropneumatyczny napęd pozycjonujący jest
urządzeniem składającym się z siłownika pneumatycznego, ustawnika pozycyjnego oraz
mikrokontrolera wyposażonego w cyfrowy regulator PID. Mikrokontroler pozwala na zadawanie
położenia z panelu operatora lub za pomocą analogowego sygnału prądowego 4-20 mA. Zdjęcie
elektropneumatycznego ustawnika pozycjonującego prezentuje rysunek 2.
Rys. 2. Widok elektropneumatycznego ustawnika pozycjonującego
Szczegóły konstrukcyjne urządzenia zaprezentowano na rysunkach 3 i 4. Blok zaworowy
został wykonany jako układ 4 zaworów 2/2 bezpośrednio sterowanych elektromagnesem. Zawory
sterowane są sygnałem PWM. Blok zaworowy i układ pomiarowy jest połączony
z mikrokontrolerem za pomocą przewodu trójżyłowego.
2
Hydrauliczne i Pneumatyczne Układy Automatyki
Laboratorium 5
Rys. 3. Blok zaworowy elektropneumatycznego ustawnika pozycyjnego
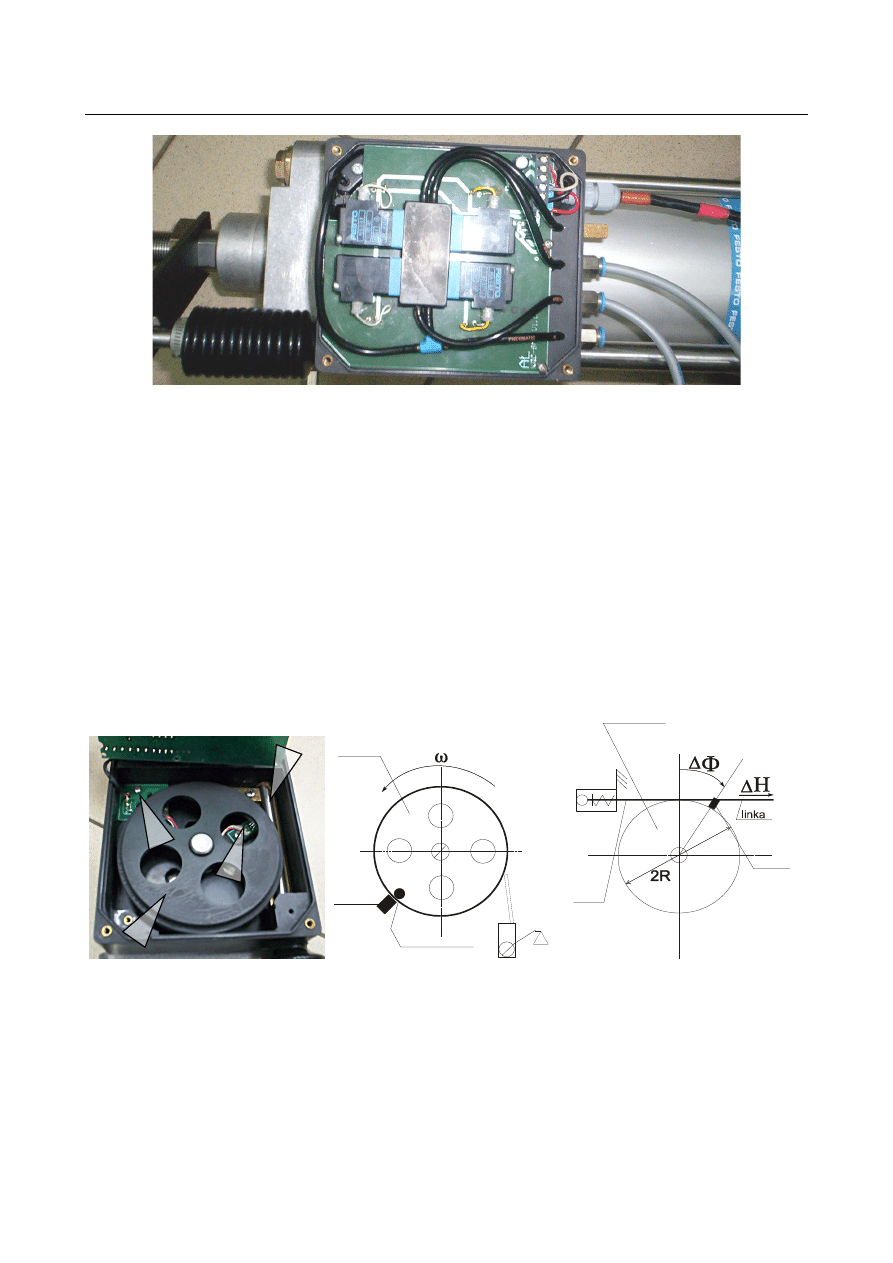
Układ pomiaru przemieszczenia jest w tym urządzeniu rozwiązaniem unikalnym. Szczegóły
tego układu prezentują kolejno rysunki 4a, 4b i 4c. Pomiar przemieszczenia jest realizowany tutaj
cyfrowo. Jest to możliwe dzięki zliczaniu czasu potrzebnego na przebycie drogi przez magnes
zamocowany na wirującej tarczy pomiędzy czujnikiem Halla zamocowanym na stałe w obudowie a
czujnikiem zamocowanym na obrotowej tarczy. Kąt obrotu tarczy jest proporcjonalny do liniowego
przemieszczenia siłownika pneumatycznego. Oznacza to, że czas pomiędzy kolejnymi impulsami
rejestrowanymi przez czujniki Halla jest również proporcjonalny do położenia tłoka siłownika.
Dokładność pomiaru jest uzależniona od szybkości zastosowanych w mikrokontrolerze liczników.
wirująca
tarcza
dysza
znacznik
magnetyczny
czujnik
stały
linka
tarcza
napędzana
linką
czujnik
ruchomy
Rys. 4. Moduł pomiarowy wykorzystywany w charakterze sprzężenia zwrotnego: a) zdjęcie modułu:
1 – wirująca tarcza, 2 – czujnik Halla stały, 3 – czujnik Halla zmieniający swe położenie kątowe proporcjonalnie do
położenia tłoczyska siłownika, 4 – osłona linki mocującej ruchomą tarczę z tłoczyskiem siłownika;
b) rysunek poglądowy wirującej tarczy ze znacznikiem magnetycznym; c) widok tarczy pomiarowej sprzężonej
z tłoczyskiem siłownika
3
1
2
3
4
a)
b)
c)

Hydrauliczne i Pneumatyczne Układy Automatyki
Laboratorium 5
2 Uruchomienie pneumatycznego liniowego napędu pozycjonującego
Uruchomienie pneumatycznego ustawnika pozycjonującego wymaga kolejno:
1. sprawdzenia wartości ciśnień zasilającego i sterującego,
2. podłączenia przyłącza 1 do źródła zasilania w sprężone powietrze o ciśnieniu nie
przekraczającym wartości podawanej przez producenta,
3. podłączenia urządzenia zadającego ciśnienie sterujące w zakresie podanym przez
producenta.
Do określenia właściwości pneumatycznego ustawnika pozycjonującego zastosować
precyzyjny zawór redukcyjny pozwalający na zmianę ciśnienia sterującego zgodnie ze specyfikacją
producenta.
Określić właściwości statyczne ustawnika.
Jaki jest związek pomiędzy obserwowanymi właściwościami badanego układu a
poszczególnymi elementami konstrukcji ustawnika pozycyjnego?
Zmieniając obciążenie poprzez nakładanie i zdejmowanie masy na tłoczysko siłownika
określić charakter odpowiedzi badanego układu.
Od czego zależy prędkość ruchu siłownika w badanym układzie?
Wykorzystując schemat z rysunku 1 narysować schemat blokowy opisujący relacje pomiędzy
poszczególnymi elementami ustawnika.
Określić jaki typ mostka pneumatycznego zastosowano w badanym układzie.
3 Uruchomienie elektropneumatycznego liniowego napędu pozycjonującego
Uruchomienie elektropneumatycznego ustawnika pozycjonującego wymaga kolejno:
1. podłączenia mikrokontrolera do zasilania,
2. podłączenia źródła zasilania pneumatycznego o ciśnieniu zgodnym ze specyfikacją
producenta,
3. nastawieniu parametrów cyfrowego regulatora PID wykorzystując np. metodę Ziglera –
Nicholsa [3], po przejściu do trybu nastaw ręcznych,
4. zadaniu pozycji siłownika z panelu operatora po przejściu do trybu automatycznego.
Śledząc wskazania układu pomiarowego określić charakter uchybu statycznego
występującego w układzie.
W jaki sposób wpływają źle dobrane wartości regulatora na pracę urządzenia?
Zmieniając obciążenie poprzez nakładanie i zdejmowanie masy na tłoczysko siłownika
4

Hydrauliczne i Pneumatyczne Układy Automatyki
Laboratorium 5
określić charakter odpowiedzi badanego układu.
Od czego zależy prędkość ruchu siłownika w badanym układzie?
Na podstawie [2] i opisu z punktu 1.2 narysować schemat szczegółowy połączeń zaworów
elektropneumatycznych odpowiadający blokowi zaworowemu badanego ustawnika. Określić jaki
typ mostka pneumatycznego tworzą w tym układzie wspomniane zawory.
Porównać właściwości pneumatycznych i elektropneumatycznych ustawników
pozycjonujących uruchamianych podczas zajęć.
Literatura:
[1]
Aplisens sp. z o.o.: Pneumatyczny ustawnik pozycyjny typ A705.
http://www.aplisens.com.pl/dodatkowe_aplikacje_advertnet/pdf/produkty/A705.pdf
[2]
FESTO Sp. z o.o.: Liniowy Napęd Pozycjonujący LNP - ... Katalog
[3]
Niederliński A.: Systemy komputerowe automatyki przemysłowej. t. 2, WNT, Warszawa 1985
5
Document Outline
- 1 Wprowadzenie
- 2 Uruchomienie pneumatycznego liniowego napędu pozycjonującego
- 3 Uruchomienie elektropneumatycznego liniowego napędu pozycjonującego
- Literatura:
Wyszukiwarka
Podobne podstrony:
HiPUA Laboratorium 2
HiPUA Laboratorium 4 1
HiPUA Laboratorium 1 teoria
HiPUA Laboratorium 1 teoria
HiPUA Laboratorium 3 id 202110 Nieznany
HiPUA Laboratorium 4 3
HiPUA Laboratorium 4 2
HiPUA Laboratorium 1
HiPUA Laboratorium 2
HiPUA Laboratorium 1 teoria
HiPUA lab Test do laborato
Kontrola badań laboratoryjnych
badania laboratoryjne 6
ROZRÓD Badanie terenowe i laboratoryjne mleka
więcej podobnych podstron