
Podstawy Teorii Obwodów
PPOM
2013
Model obwodowy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Klasyfikacja obwodów . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Założenia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Opis obwodów. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Topologia obwodu. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Rodzaje elementów obwodów . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Konwencje oznaczeń elementów obwodów . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Liniowość . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
10
Opór . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Pojemność . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Indukcyjność . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
16
Idealne źródła niezależne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
18
Prawa Kirchhoffa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Równoważność źródeł rzeczywistych . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Zasada superpozycji . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Twierdzenie o źródle zastępczym . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Przykład 4.2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Przykład 4.3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
1
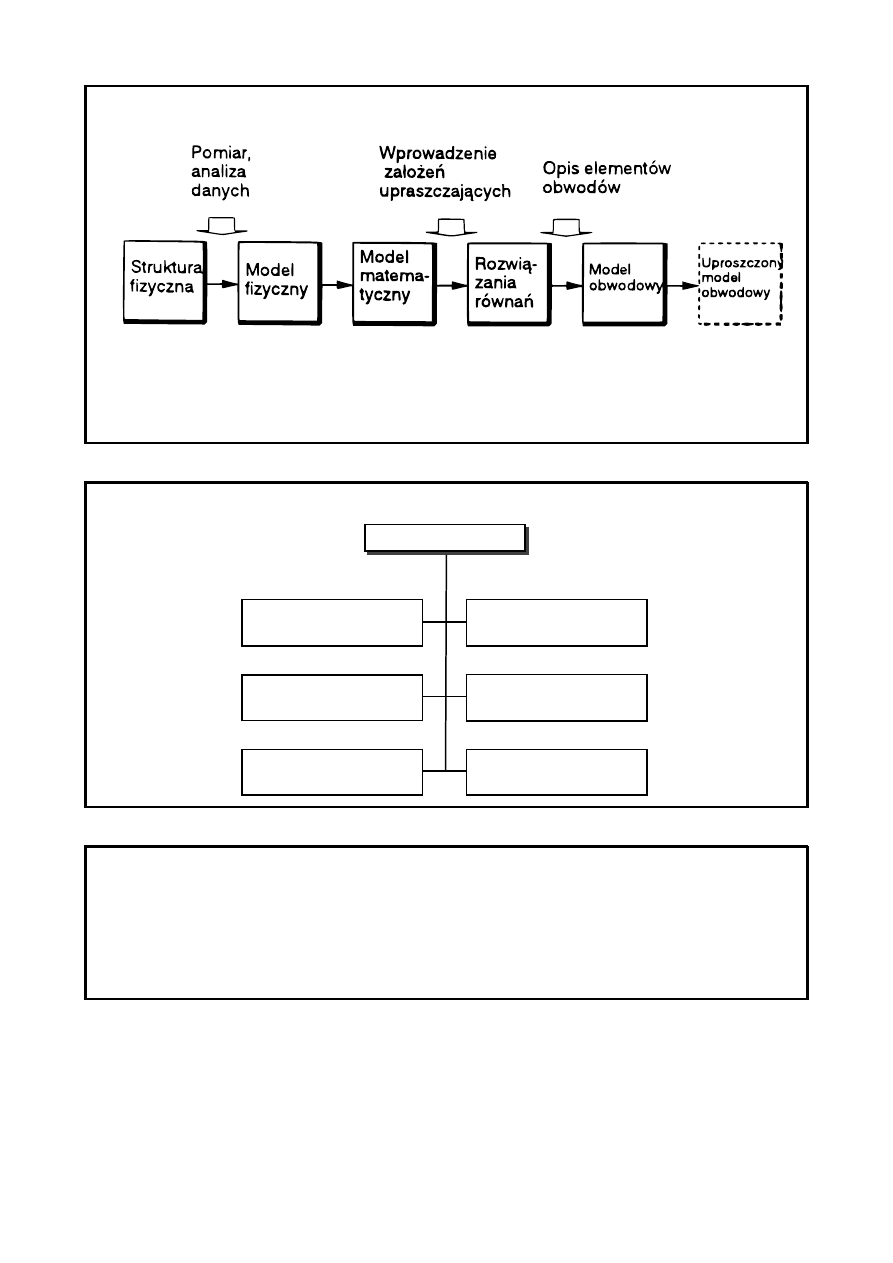
Obwody elektryczne jako modele przyrządów i struktur fizycznych
podzespoły,
przyrządy,
zjawiska
elektrody-
namika,
f
izyka ciała
stałego
równania
Maxwella,
równania
transportu
nośników
charakte-
rystyki
elementów
modele
elementów:
RLC,
aktywnych
modele:
liniowy,
o stałych
skupionych
PPOM
W2/3–2
Klasyfikacja obwodów
Obwody elektryczne
O stałych skupionych
(S)
O stałych rozłożonych
(R)
Liniowe
(L)
Nieliniowe
(N)
Stacjonarne
(S)
Niestacjonarne
(N)
PPOM
W2/3–3
Założenia
Podstawowe założenia analizy obwodów:
■
jednoczesność oddziaływań i skutków we wszystkich punktach układu ⇒ struktury o stałych
skupionych (S),
■
idealność (zerowy opór) doprowadzeń elementów.
PPOM
W2/3–4
Opis obwodów
Składniki informacji o właściwosciach obwodu:
■
struktura połączeń (topologia obwodu),
■
charakterystyki (równania) elementów obwodu
PPOM
W2/3–5
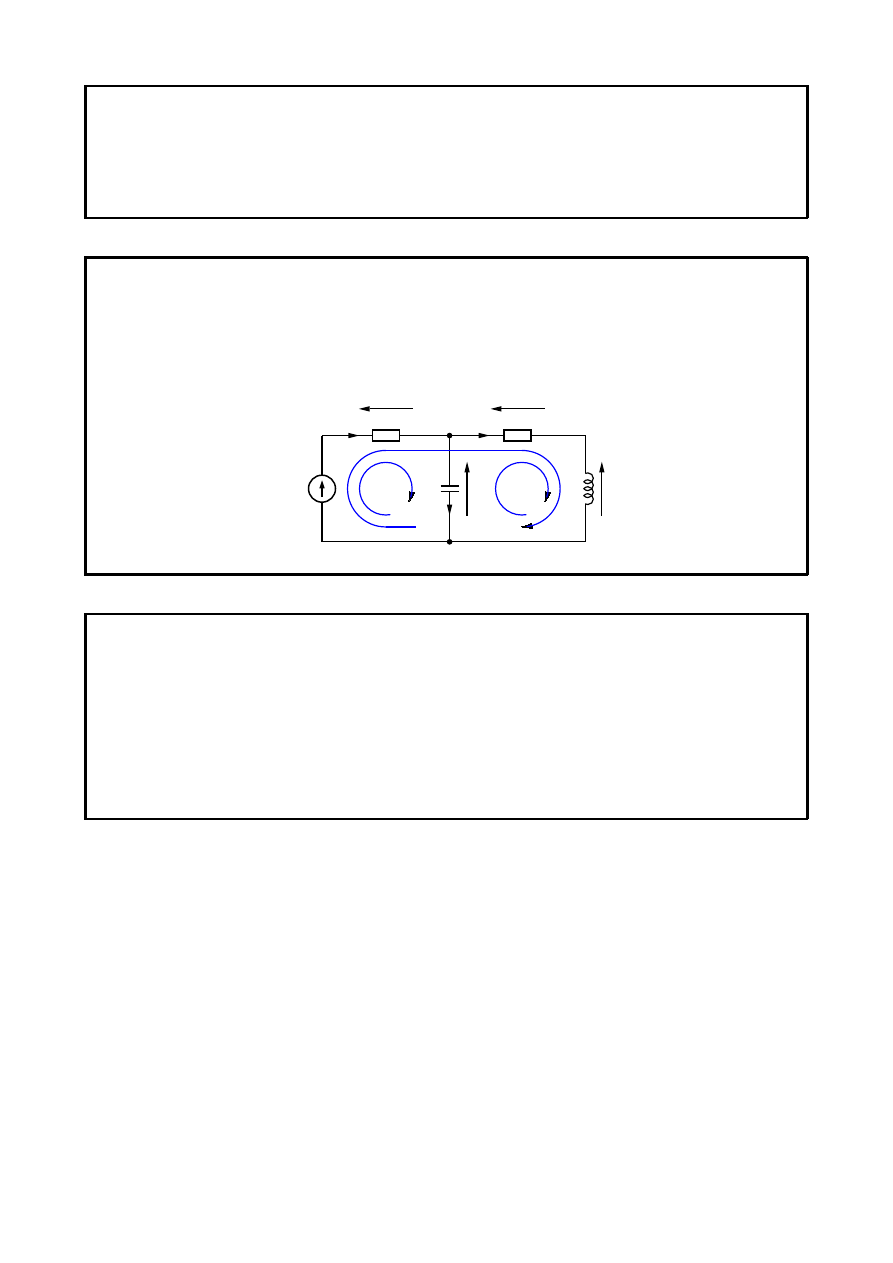
Topologia obwodu
węzeł
miejsce połączenia trzech lub więcej wyprowadzeń różnych elementów,
gałąź połączenie między dwoma sąsiednimi węzłami złożone z jednego lub więcej elementów,
obwód zamknięty
droga zamknięta złożona z gałęzi (usunięcie dowolnej gałęzi powoduje
otwarcie obwodu).
R
1
i
1
u
1
A
C
i
3
u
3
B
R
2
i
2
u
2
L
u
L
e
b
a
c
PPOM
W2/3–6
Rodzaje elementów obwodów
bierne rozpraszające energię lub zdolne do magazynowania energii dostarczonej z zewnątrz
(reprezentowane przez R, L, C, M itp.)
■
stratne (dyssypatywne),
■
bezstratne (reaktancyjne);
aktywne zdolne do dostarczania energii (reprezentowane przez źródła niezależne, źródła
sterowane itp.).
PPOM
W2/3–7
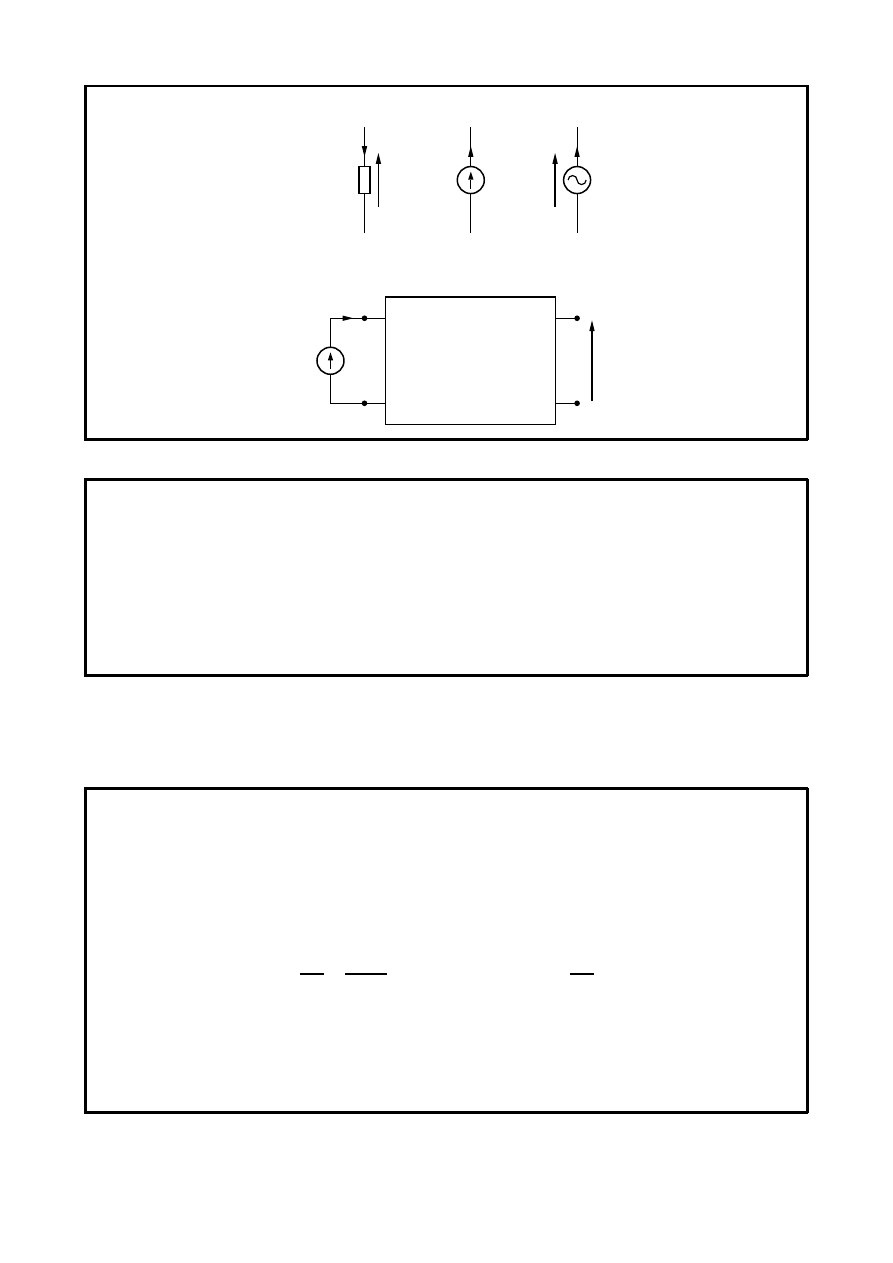
Konwencje oznaczeń elementów obwodów
pobudzenie
wymuszenie
R
i
u
E
I
i
e
e
i
1
1
2
3
4
u
34
odpowiedź
PPOM
W2/3–8
Liniowość
Jeśli odpowiedzią na wymuszenie x
1
jest y
1
, a odpowiedzią na wymuszenie x
2
jest y
2
, to:
1. odpowiedzią na wymuszenie x
1
+ x
2
będzie y
1
+ y
2
(addytywność),
2. odpowiedzią na wymuszenie ax
1
będzie ay
1
(jednorodność) dla dowolnej liczby
rzeczywistej a.
F(ax
1
+ bx
2
) = aF(x
1
) + bF(x
2
)
PPOM
W2/3–9
Elementy bierne
W2/3–10
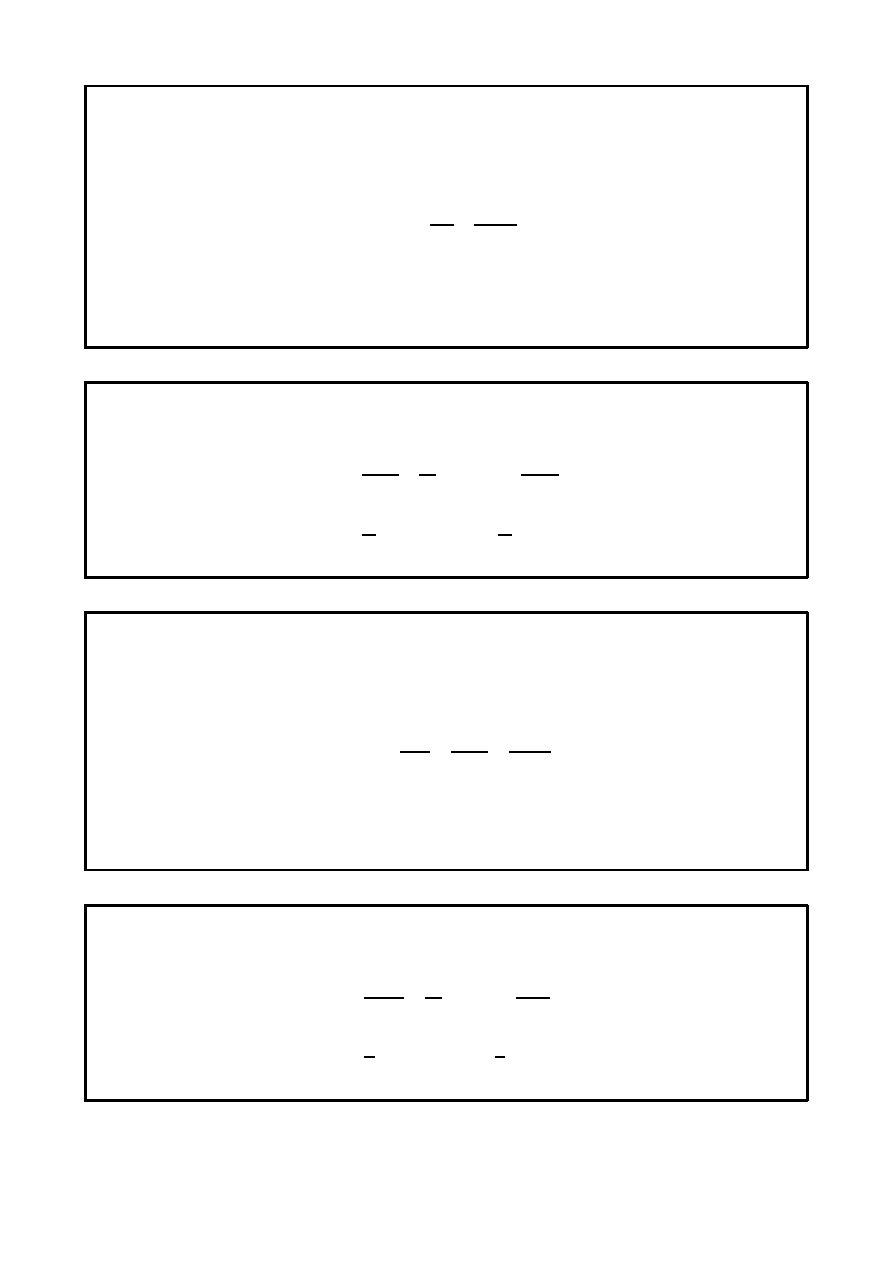
Opór
Opór (rezystancja): R
Przewodność (konduktancja): G = R
−
1
Wymiar: dim(R) = L
2
MT
−
3
I
−
2
Jednostki: om, simens
1 Ω =
1 V
1 A
=
kg m
2
A
2
s
3
1 S =
1 A
1 V
= 1 Ω
−
1
„Jeden om (Ω) stanowi rezystancję między dwoma punktami przewodnika, przez który płynie
prąd o natężeniu 1 ampera (A), gdy różnica potencjałów między tymi punktami wynosi
1 wolt (V).”
u = Ri
i = Gu
PPOM
W2/3–11
Pojemność
Symbol: C
Wymiar: dim(C) = L
−
2
M
−
1
T
4
I
2
Jednostka: farad
1 F =
1 C
1 V
=
A
2
s
4
kg m
2
„Jeden farad (F) stanowi pojemność kondensatora, w którym miedzy okładkami występuje
napięcie 1 wolta (V), gdy znajdują się na nich różnoimienne ładunki elektryczne o wartości
1 kulomba (C) każdy.”
q = Cu
PPOM
W2/3–12
Pojemność
i(t) =
dq(t)
dt
=
d
dt
[Cu(t)] = C
du(t)
dt
u(t) =
1
C
t
Z
−∞
i(τ) dτ = U
0
+
1
C
t
Z
0
i(τ) dτ
PPOM
W2/3–13
Indukcyjność
Symbol: L
Wymiar: dim(L) = L
2
MT
−
2
I
−
2
Jednostka: henr
1 H =
1 Vs
1 A
=
1 Wb
1 A
=
kg m
2
A
2
s
2
„Jeden henr (H) stanowi indukcyjność obwodu, w którym indukuje się siła elektromotoryczna
1 wolta (V), gdy prąd przepływający przez ten obwód zmienia się jednostajnie o 1 amper (A)
w czasie 1 sekundy (s).”
ψ = Li
PPOM
W2/3–14
Indukcyjność
u(t) =
dψ(t)
dt
=
d
dt
[Li(t)] = L
di(t)
dt
i(t) =
1
L
t
Z
−∞
u(τ) dτ = I
0
+
1
L
t
Z
0
u(τ) dτ
PPOM
W2/3–15
Elementy czynne
W2/3–16
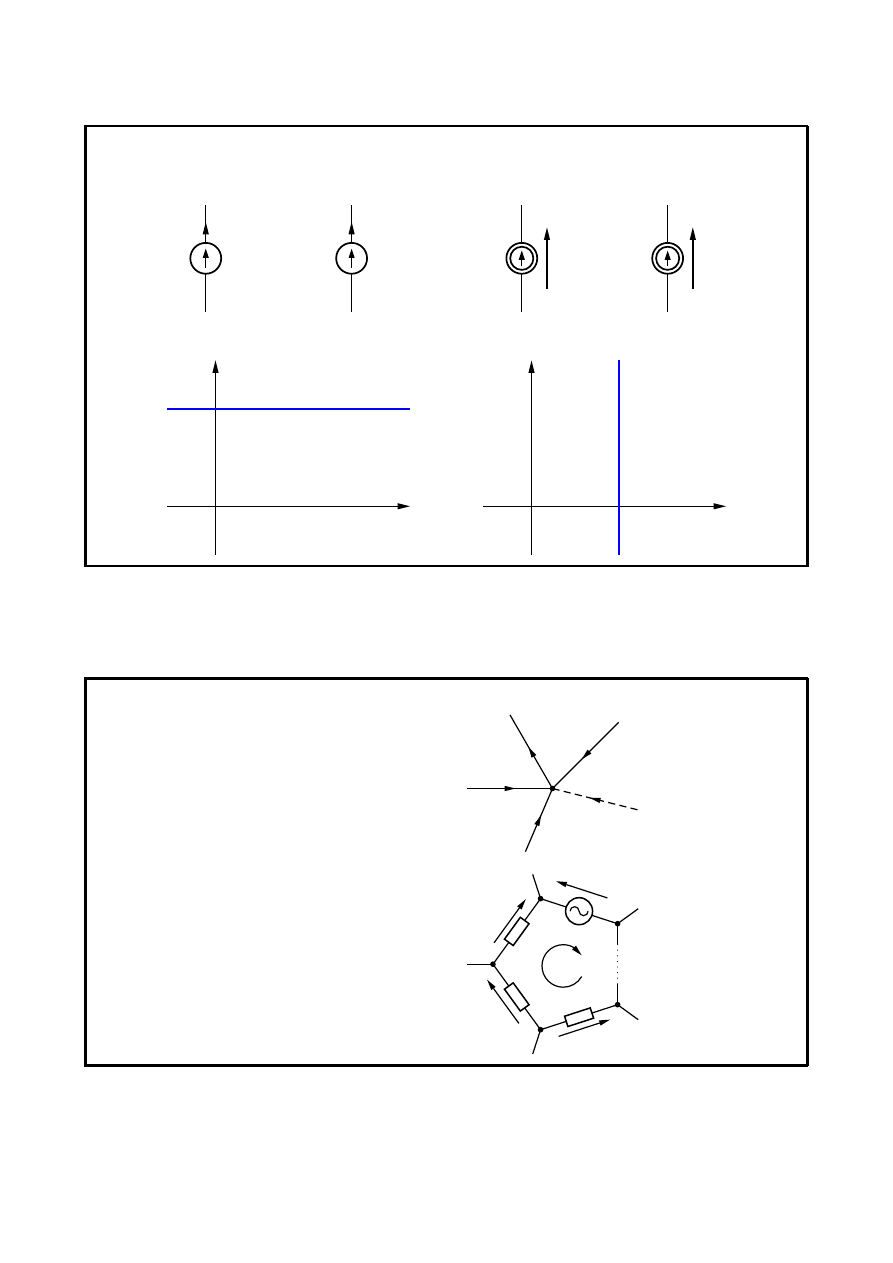
Idealne źródła niezależne
Źródło napięciowe
Źródło prądowe
E
I
e
i
I
U
E
J
U
j
u
I
U
J
PPOM
W2/3–17
Podstawowe prawa obwodowe
W2/3–18
Prawa Kirchhoffa
Prądowe prawo Kirchhoffa
n
X
k=1
I
k
= 0
I
1
I
2
I
3
I
k
I
n
Napięciowe prawo Kirchhoffa
n
X
k=1
U
k
= 0
U
2
E
3
U
n
U
1
PPOM
W2/3–19
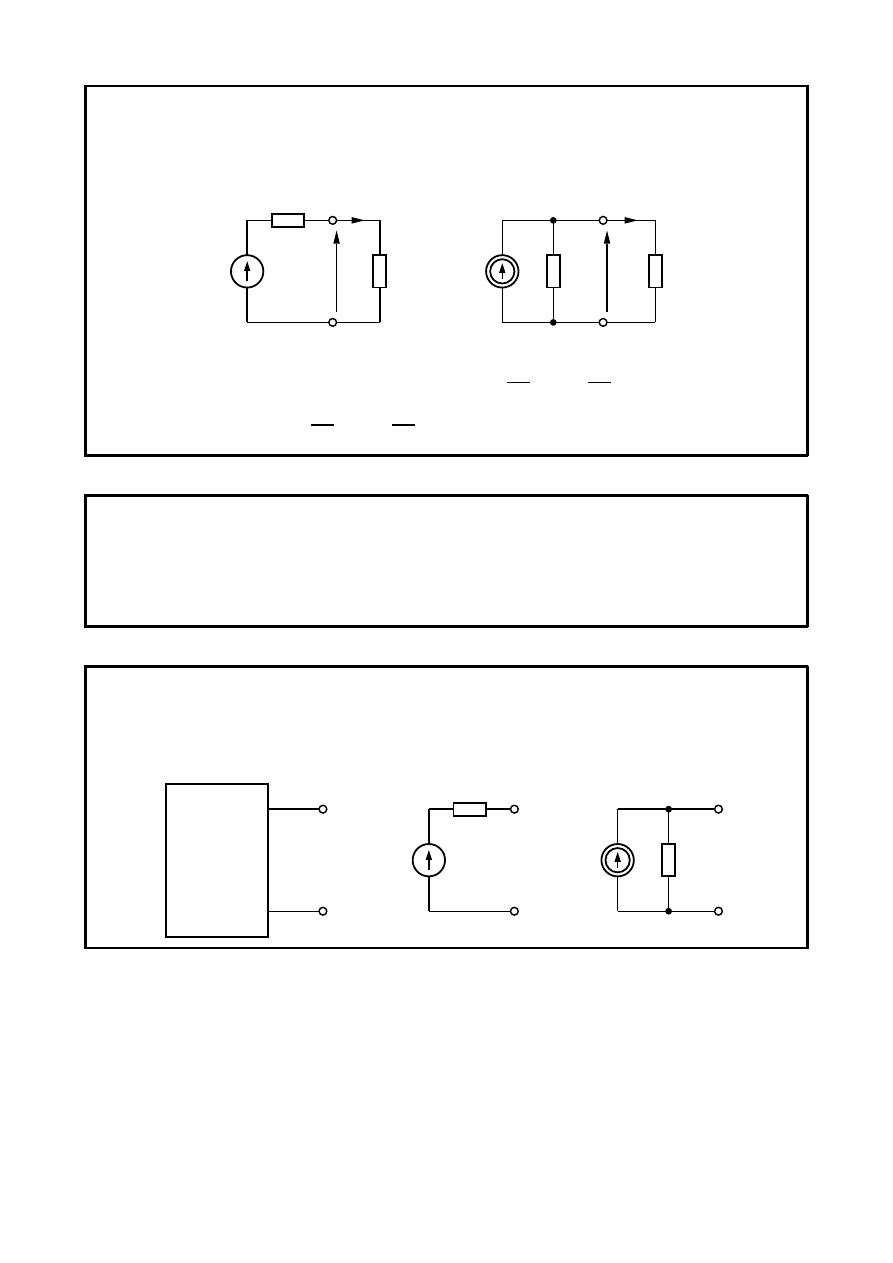
Równoważność źródeł rzeczywistych
Dwa żródła są równoważne, jeżeli wytwarzają identyczny prąd w obwodzie obciążenia przy
dowolnej wartości oporu R.
E
R
w
I
R
U
J
I
U
G
w
R
=⇒
J =
E
R
w
G
w
=
1
R
w
E =
J
G
w
R
w
=
1
G
w
⇐
=
PPOM
W2/3–20
Zasada superpozycji
Prąd (napięcie) w wyróżnionej gałęzi układu liniowego, w którym występuje kilka źródeł
niezależnych, może być obliczony jako suma prądów (napięć) wywołanych w tej gałęzi przez
każde z tych źródeł działających osobno, tzn. po zastąpieniu wszystkich pozostałych
niezależnych źródeł napięciowych zwarciami i niezależnych źródeł prądowych rozwarciami.
PPOM
W2/3–21
Twierdzenie o źródle zastępczym
Twierdzenie Thevénina – Nortona
Obwód
liniowy
1
2
≡
E
T
R
T
1
2
≡
J
N
1
2
G
N
PPOM
W2/3–22
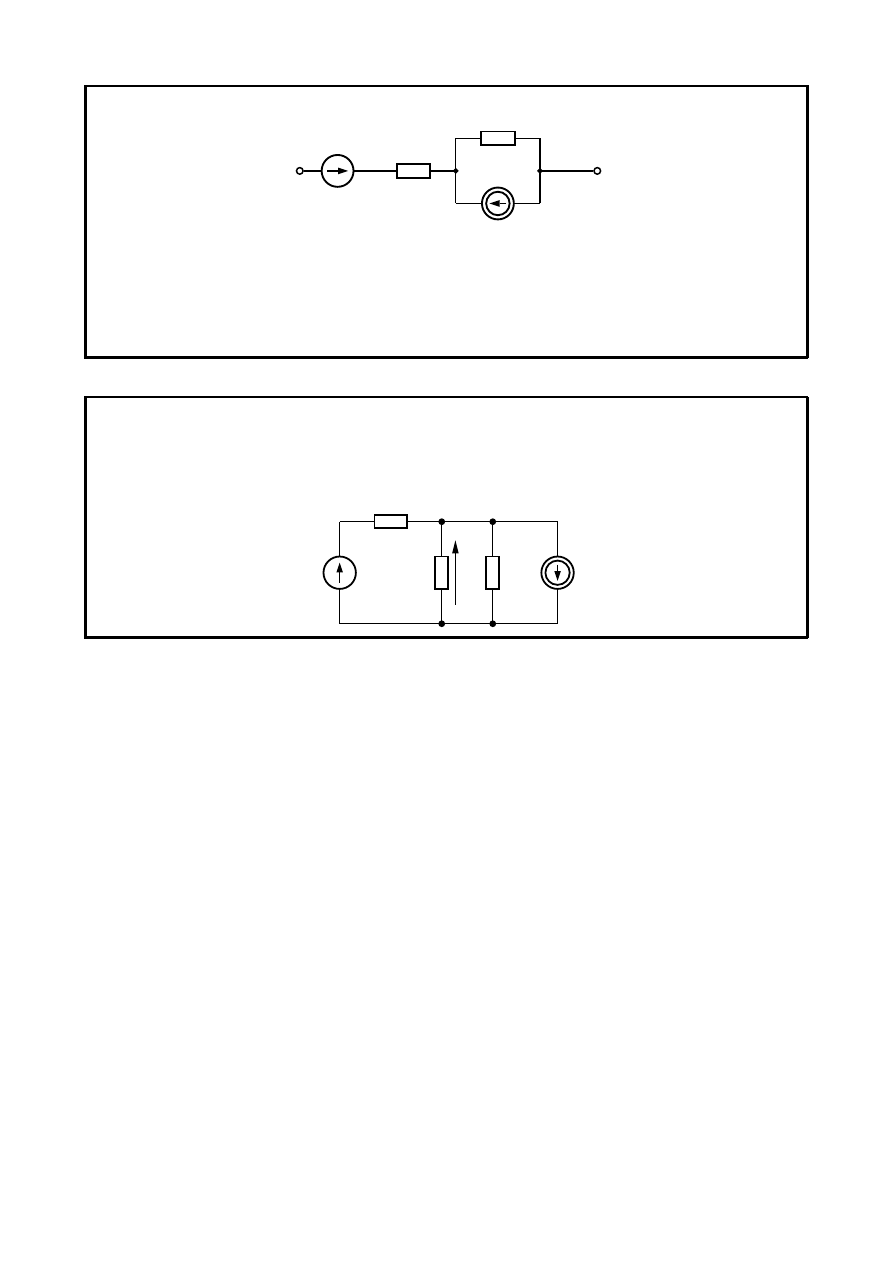
Przykład 4.2
E
1
R
1
G
2
J
2
Źródło napięciowe o sile elektromotorycznej E
1
= 10 V i oporze wewnętrznym R
1
= 1 Ω
połączono szeregowo ze źródłem prądowym o wydajności J
2
= 5 A i przewodności wewnętrznej
G
2
= 0,5 S.
Obliczyć parametry zastępczego źródła napięciowego.
PPOM
W2/3–23
Przykład 4.3
Stosując zasadę superpozycji, obliczyć spadek napięcia na oporze R.
Przyjąć: E = 20 V, J = 5 mA, R
1
= 1 kΩ, R
2
= 2 kΩ, R = 1 kΩ.
E
R
1
R
U
R
2
J
PPOM
W2/3–24
Document Outline
- Obwody elektryczne jako modele przyrz¡dów i struktur fizycznych
- Klasyfikacja obwodów
- Zaªo»enia
- Opis obwodów
- Topologia obwodu
- Rodzaje elementów obwodów
- Konwencje oznacze« elementów obwodów
- Liniowo±¢
- Elementy bierne
- Elementy czynne
- Podstawowe prawa obwodowe
Wyszukiwarka
Podobne podstrony:
Vol 14 Podst wiedza na temat przeg okr 1
podst gospod grunt s 6 w 12
Podst elektron i energoelekron wyklad1
17 Metodologia dyscyplin praktycznych na przykładzie teorii wychowania fizycznego
PODSTAWY TEORII ORGANIZACJI I ZARZĄDZANIA Konwersatorium 1
wprowadzenie do systemu win i podst sieci
Obw ukł nerw
podstawy teorii przedsiębiorstwa zaoczni
KORP TRANS GRUPY TEORII KTN i BIZ 2010
Semiologia w teorii komunikacji 2
Psychologia osobowości dr Kofta wykład 4 Osobowość w świetle teorii uczenia sie
Podst rehabilitacji
Idea koncepcyjnej teorii dziel Nieznany
więcej podobnych podstron