
AKADEMIA GÓRNICZO
– HUTNICZA
KATEDRA METROLOGII I ELEKTRONIKI
TEORIA I PRZETWARZANIE SYGNAŁÓW
Zadanie projektowe pt.:
FILTRACJA ADAPTACYJNA
– IDENTYFIKACJA OBIEKTÓW
Wykonał:
RADZIK
Jarosław

Jarosław RADZIK
AKADEMIA GÓRNICZO-HUTNICZA W KRAKOWIE , KATEDRA METROLOGII I
ELEKTRONIKI
rok akademicki 2014/2015
Filtracja adaptacyjna
– identyfikacja obiektów
)
(
1
)
(
n
dx
n
xx
o
p
R
w
STRESZCZENIE
Celem projektu jest demonstracja zasad i efektów
działania filtrów adaptacyjnych. Spo ród różnych
zastosowań filtrów adaptacyjnych, dla celów tej
prezentacji wybrano system identyfikacji.
W czę ci
teoretycznej
zostały
zaprezentowane
ogólne
wiadomo ci odno nie filtracji adaptacyjnej oraz
konkretne jej metody oraz rodzaje filtrów. Czę ć
praktyczna przedstawia wyniki symulacji dwóch
typów identyfikacji parametrycznej opartej na
przetworzonych
splotowo sygnałów pomiarowych
oraz bezpo rednio aproksymowanych funkcjami
sklejanymi sygnały pomiarowe. Dodatkowo zostanie
przeprowadzona identyfikacja odpowiedzi impulsowej
układu LTI za pomocą filtru RLS.
Słowa kluczowe: filtracja adaptacyjna, filtr RLS,
sklejanie sygnałów.
1. WSTĘP
Filtracja
adaptacyjna
jest
szeroko
wykorzystywana w przypadkach, gdy parametry
systemu (procesu) są zmienne w czasie, a statystyczne
cechy sygnałów nie są znane. Algorytmy filtracji,
przeprowadzające proces optymalizacji, wspomagają
wówczas zadanie identyfikacji takiego systemu.
Wydajno ć algorytmów okre lana jest przez
liczbę czynników takich jakŚ
— dokładno ć otrzymanego rozwiązania,
— prędko ć zbieżno ci,
— zdolno ć ledzenia dla procesów
zmiennoczasowych,
— złożono ć obliczeniowa,
— odporno ć na błędy zaokrągleń,
— równoległe operacje dla platform
wieloprocesorowych.
W pracy przedstawione zostają podstawowe i
szeroko wykorzystywane algorytmy gradientowe
(rozdziały 3, 4).
2. FILTR WIENERA
Model
systemu
opisany
jest
równaniem
różnicowymŚ
(2.1)
gdzie: x(n)
-
sygnał wej ciowy,
d(n)
-
sygnał wyj ciowy,
w
i
o
-
współczynniki filtru.
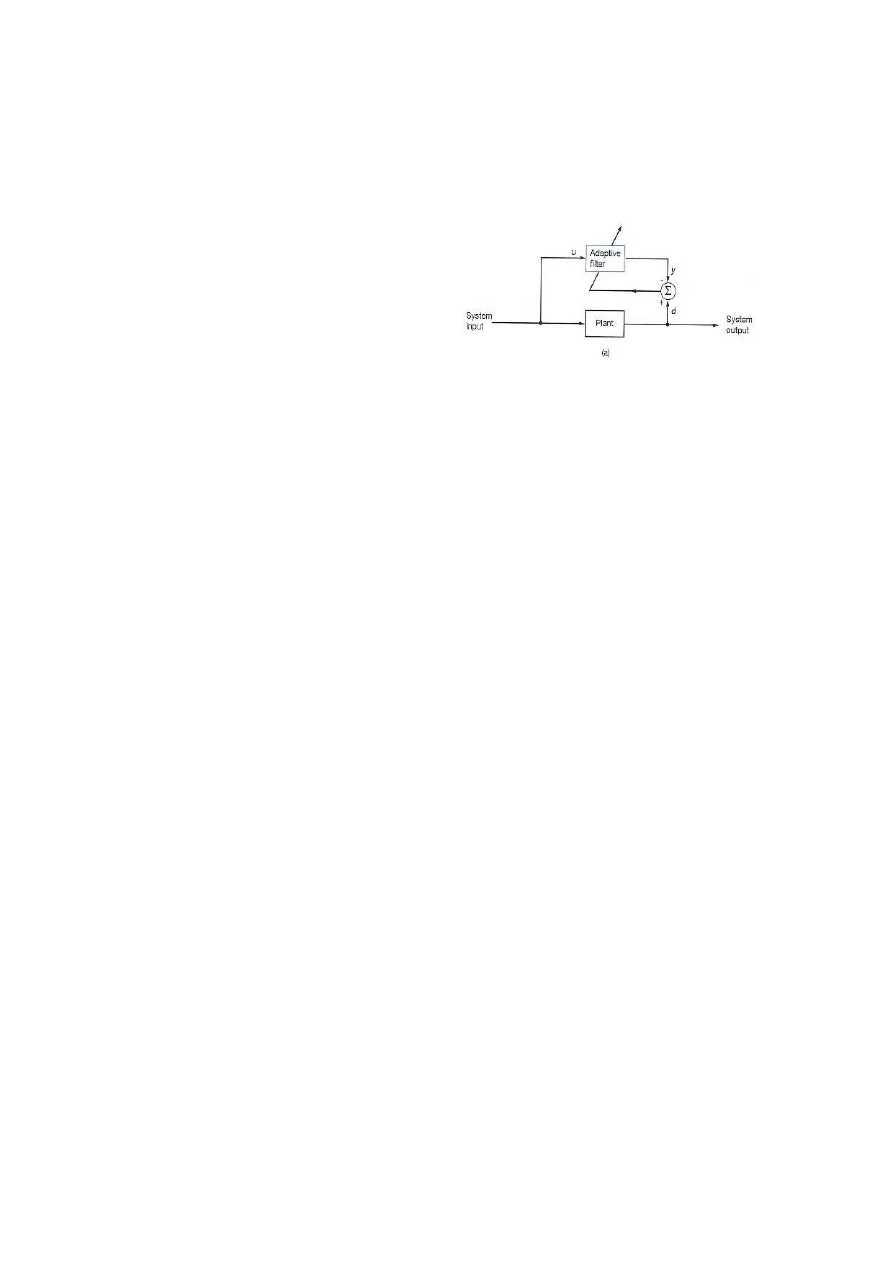
Rys.1
. Filtr adaptacyjny w konfiguracji identyfikacji
obiektu
[źródło: Internet]
Powyższy wzór można zapisać w formie
� =
�
� ∙
(2.2)
� = [ � , … , � − � + ]
�
(2.3)
�
= [
�
, … ,
−
�
]
�
(2.4)
Estymatorem FIR powyższego systemu jestŚ
� =
�
� ∙
(2.5)
gdzie w=[w
0
, …, w
M-1
] są estymatami parametrów
rzeczywistego systemu. Celem jest takie wyznaczenie
w
M
aby błąd
redniokwadratowy pomiędzy
zmierzonym sygnałem d(n) (sygnałem odniesienia) a
sygnałem wyj ciowym modelu y(n) był minimalny.
Kryterium błędu wygląda następującoŚ
� = � ∙ [
� ] = � ∙ [( � − � ) ] (2.6)
gdzie E
[.] oznacza warto ć oczekiwaną. Podstawienie
(2.5) do (2.6) daje w rezultacie:
�
= � ∙ [
� −
�
�
] (2.7)
Proste przekształcenia i obliczenie pochodnej
względem w oraz przyrównanie jej do zera prowadzi
do wyrażenia na optymalne warto ci wag w filtra,
który nosi nazwę filtru WieneraŚ
(2.8)
gdzie: R
xx
(n)
- estymata
macierzy
autokorelacji
sygnału x(n) w n-tej chwili czasowej,
p
dx
(n)
- estymata wektora korelacji wzajemnej
sygnału wej ciowego i odniesienia,
1
0
)
(
)
(
M
i
o
i
i
n
x
w
n
d
))
(
(
)
(
2
1
)
(
)
1
(
n
J
n
n
n
w
w
w
1
2
))
(
(
)
(
n
J
n
w
W
(n)
n
n
v
w
w
)
(
)
1
(
))
(
(
)
(
)
(
2
1
)
(
)
1
(
n
J
n
n
n
n
w
W
w
w
3. METODY GRADIENTOWE
Praktyczne wykorzystanie równania (2.8) dla
każdej chwili czasu n pociąga za sobą kłopot z
poprawną
estymacją
warto ci
oczekiwanych,
co
jest
typowym
problemem
stochastycznej
optymalizacji. Wynika to z faktu, że w większo ci
przypadków
funkcje
rozkładu
gęsto ci
prawdopodobieństwa obserwowanych zmiennych
losowych nie są znane lub też zmienne te są
niestacjonarne. Aby przezwyciężyć ten problem
adoptuje się zazwyczaj znane iteracyjne metody
optymalizacji okre lone dla deterministycznych
funkcji kosztu.
Najczę ciej
stosowanymi
algorytmami
optymalizującymi deterministyczną funkcję kosztu
(celu) są adaptacyjne algorytmy gradientowe.
Rekursywny estymator ma postaćŚ
(3.1)
gdzie: w(n+1)
– wektor współczynników filtru w
chwili n+1,
w(n)
– wektor współczynników filtru w chwili n,
μ(n) – współczynnik skalujący (w ogólno ci zmienny
w czasie),
v(n)
– kierunek modyfikacji.
Wzór (3.1) pokazuje uaktualnianie parametrów
filtru w kierunku v(n
). Najczęstszym wyborem v(n)
jest kierunek przeciwny do okre lonego przez gradient
z funkcji celu J(.).
3.1. Algorytmy najszybszego spadku
Mają one postaćŚ
(3.2)
gdzie:
J
(w(n))
–
wektor gradientu funkcji
kosztu,
μ(n) – współczynnik skalujący.
3.2. Algorytmy Newtona-Raphsona
Przyjmują postaćŚ
(3.3)
gdzie W(n
) jest macierzą wagową, poprawiającą
zbieżno ć (szybko ć adaptacji). W algorytmach
Newtona-Raphsona za macierz W(n
) przyjmuje się
odwrotno ć hesjanu funkcji celu J(w(n)) w n-tej
chwili czasowej:
(3.4)
3.3. Algorytmy Quasi-Newtona
W przypadkach gdy wyznaczenie warto ci
hesjanu jest trudne, wykorzystywana jest jego
aproksymata A(n):
� +
=
� −
� [� � ]
−
��
� (3.5)
4. ADAPTACYJNE ALGORYTMY GRADIENTU
STOCHASTYCZNEGO (LMS)
Niech minimalizowana funkcja kosztu wynosi:
� =
�
(4.1)
Filtr adaptacyjny ma zatem za zadanie mi
nimalizować
chwilową a nie oczekiwaną warto ć błędu. Równanie
(3.3) przyjmuje postać (4.2) charakteryzującą szeroką
grupę filtrówŚ
� +
=
� + � � �
�
� (4.2)
� = � − � = � −
�
�
� (4.3)
gdzie: W(n)
– macierz wagowa o wymiarach MxM,
e
(n)
– sygnał błędu w chwili n.
4.1. Filtr LMS
Otrzymywany
jest
po
uniezależnieniu
współczynnika skalującego od czasu (μ(n) = μ) oraz
po wprowadzeniu identyczno ciowej macierzy
wagowej W(n) = I.
� +
=
� +
�
�
(4.4)
Zalety:
— prosta implementacja,
— mała złożono ć obliczeniowa.
Wady:
— czuło ć na rozrzut warto ci własnych macierzy
autokorelacji R,
— wolna zbieżno ć algorytmu zależna od stosunku
λ
min
/ λ
max
czyli minimalnej do
maksymalnej warto ci
własnej macierzy R.
W rezultacie warto ć parametru skalującego μ
dobierana jest w następujący sposób, zapewniający
dążenie do zera błędu dopasowania wag filtra do
warto ci optymalnych dla n→∞:
< <
�
��
(4.5)
4.2. Filtr NLMS
Unormowany filtr LMS (NLMS) otrzymywany
jest po następującym uzależnieniu w równaniu (4.4)
parametru
μ od czasu:
(4.6)
gdzie niewielki parametr γ zapobiega zerowaniu się
mianownika. Zaletą unormowanego algorytmu LMS
jest poprawienie zbieżno ci w stosunku do
podstawowego algorytmu LMS.
Niestety złożono ć
obliczeniowa jest większa, co skutkuje wydłużeniem
czasu potrzebnego do przeprowadzenia filtracji .
5. Blokowe filtry adaptacyjne
Je li w dziedzinie czasu użyty zostanie algorytm
LMS wymagający dużej ilo ci pamięci, można
zaobserwować
znaczący
wzrost
złożono ci
obliczeniowej. Problem ten może być rozwiązany na
dwa sposoby:
1.
Wybór algorytmu o nieskończonej odpowiedzi
impulsowej. Rozwiązanie takie niesie za sobą
kolejny problem związany z niestabilno cią
algorytmu.
2. Filtracja adaptacy
jna w dziedzinie częstotliwo ci,
łącząca dwie uzupełniające się metody stosowane
w cyfrowym przetwarzaniu sygnałówŚ
a)
blokowa implementacja filtru o skończonej
odpowiedzi impulsowej, pozwalająca na
skuteczne
wykorzystanie
równoległego
przetwarzania, skutk
ującego przyspieszeniem
działania algorytmu,
b) algorytmy szybkiej transformaty Fouriera
(FFT)
do
wykonywania
splotów,
umożliwiające w efektywny sposób adaptować
parametry filtru w dziedzinie częstotliwo ci.
Powyższe podej cie nazywane jest często
blokowym algorytmem LMS (BLMS). Jak wskazuje
nazwa rodziny filtrów, adaptacja przeprowadzana jest
na zasadzie „blok po bloku” zamiast „próbka po
próbce” (LMS, NLMS). Umożliwia to wykorzystanie
wspomnianej wyżej szybkiej transformaty Fouriera,
co prowadzi do oszcz
ędno ci obliczeniowych.
Zastosowanie blokowej struktury wiąże się
jednak z dodatkowym opóźnieniem w cieżce sygnału,
które wynika z konieczno ci zebrania całego bloku
danych przed jego dalszym przetwarzaniem. Im
większy blok tym opóźnienie jest większe.
6.
Porównanie
dwóch
typów
identyfikacji
W rozdziale tym zaprezentowane zostaną
wyniki
porównania
2
typów
identyfikacji
parametrycznej:
- w oparciu
o przetworzone splotowo sygnały
pomiarowe
-
w oparciu o bezpo rednio aproksymowane
funkcjami sklejanymi sy
gnały pomiarowe
Parametry obiektu identyfikowanego w testach będą
stałe lub będą zmieniały się skokowo.
Dla celów identyfikacji splotowej znajdują
zastosowanie
metody
filtracji
nieadaptacyjnej.
Symulacje przeprowadzono dla czasu T=30 i czasie
dyskretyzacji dt=0.01, zarejestrowano M=3000 próbek
pomiarowych
dla
sygnału
wej ciowego
i
wyj ciowego. Jako sygnał wymuszający u(t) przyjęto
przebieg prostokątny z okresem T
U
=10 i amplitudą
±0.5.
Następnie w t=15 nastąpiła skokowa zmiana
parametru transmitancji co spo
wodowało zmianę
wszystkich
współczynników
transmitancji
unormowanej. Szum pomiarowy nie został dodany do
sygnału wej ciowego u i na wyj ciu y, dzięki czemu
metoda identyfikacji wprowadza mniejsze błędy na
estymowane parametry i łatwiejsza jest analiza
otrzymanych wyników.
Dla pierwszego typu identyfikacji długo ć
okna filtru h=3, czas dyskretyzacji ∆t=0.01, funkcja
modulująca ᶲ(t)=t
2
(h-t)
5
(gdzie: h=3). Dokonano
operacji spalania sygnałów pomiarowych z kolejnymi
pochodnymi funkcji modulującej. W chwili t=3
równej h możliwe jest wyliczenie pierwszego splotu.
Sploty sygnałów wej ciowych i wyj ciowych
przedstawione są na rys. 2
Dla drugiego t
ypu identyfikacji rząd funkcji
modulującej k=4, ilo ć węzłów N=50. Na rys. 2
wykre lono
wyniki
aproksymacji
sygnałów
pomiarowych wej ciowego u i wyj ciowego y
funkcjami sklejanymi. Dodatkowo przedstawiono
przebiegi kolejnych pochodnych aproksymaty dla
zare
jestrowanych
sygnałów
pomiarowych.
Założono
odpowiednio
równe
identyfikowanej transmitancji rzędy licznika m=1 i
mianownika n=2. Na rys.3 przedstawiono przebieg
identyfikowanych parametrów metodą dokładną
poprzez rozwiązanie pełnego zagadnienia własnego
dla symulowanego obiektu. Długo ć przesuwanego
okna została przyjęta jako dwukrotnie większa od
długo ci funkcji modulującej h i wynosi T=6. Dla t=5
sploty już nie są na tyle długie by warto ci własne
macierzy Grama zaczęły się stabilizować.
1
0
2
)
(
)
(
)
(
)
(
M
k
T
k
n
x
n
n
n
x
x
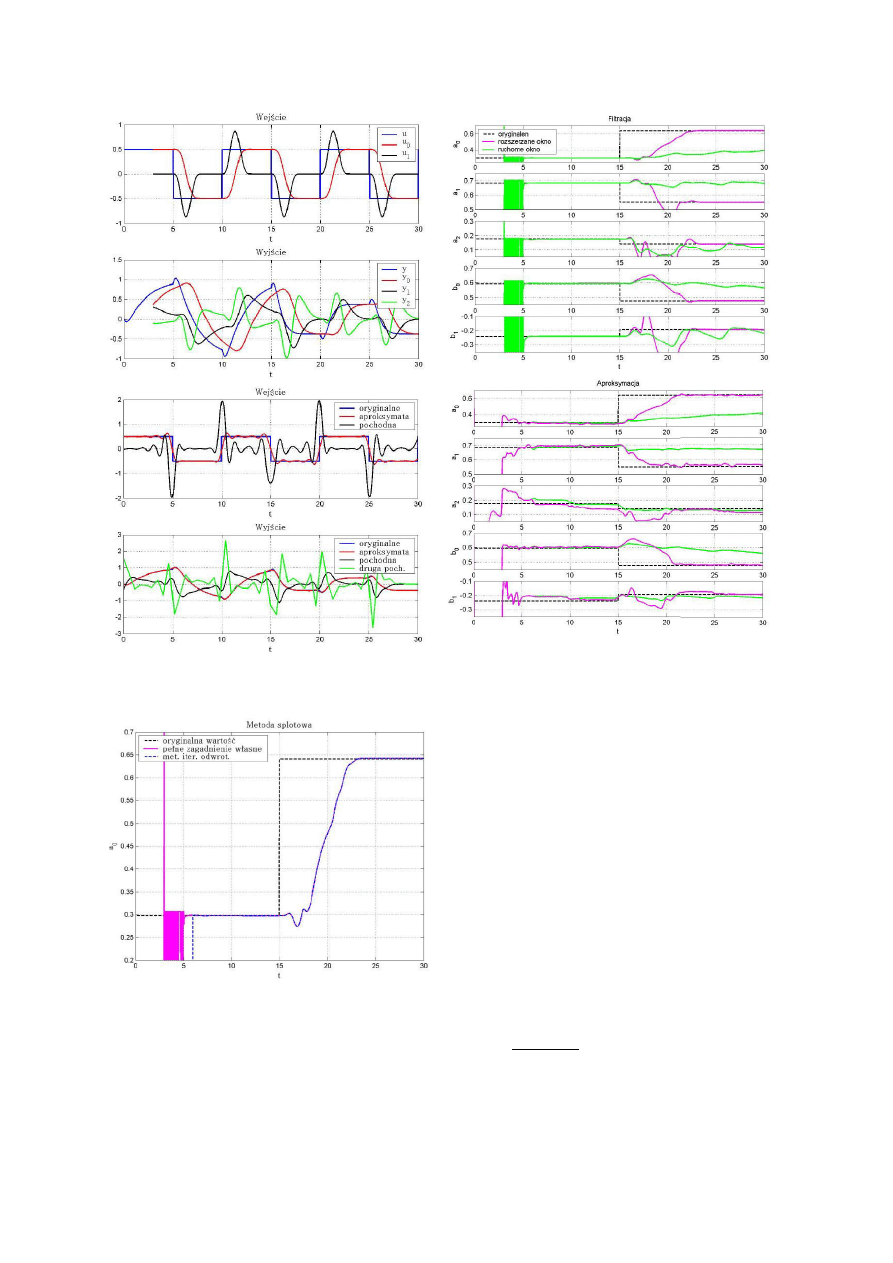
Rys.2 Wynik
i filtracji i aproksymacji z sygnałami
pomiarowymi wej cia i wyj cia.
Rys.3
Porównanie wyników rozwiązania pełnego i
przybliżonego zagadnienia własnego
Rys. 4 Przebieg identyfikacji parametrów w
rozszerzanym i ruchomym oknie
7. Filtry adaptacyjne RLS
Implementacja algorytmu RLS wymaga znajomo ci
warto ci początkowej macierzy odwrotnej P,
przyjmuje się, że jest nią macierz diagonalna z
warto ciami δ
-1
na przekątnej, gdzie δ jest małą
warto cią dodatnią.
Podsumowując, algorytm RLS jest następującyŚ
I. Inicjalizacja
1. Wybór długo ci filtra M,
2. Początkowe współczynniki filtra można ustawić na
zero h
0
=0,
Początkowa macierz odwrotna P
0
=
δ
-1
I, gdzie
δ jest
małą warto cią dodatnią.
IIa. Obliczenia dla N=1,2,3,...
. � =
�
�−1 �
+
�
�
�
−1 �
(7.1)
.
=
�
ℎ
−
(7.2)
. ℎ = ℎ
−
+ �
(7.3)
. � = �
−
− �
�
�
−
(7.4)
W przypadku, kiedy filtr RLS wykorzystywany jest do
ledzenia parametrów zmiennych w czasie, stosuje się
wykładnicze zapominanie najstarszych pomiarów i
obliczenia przebiegają następującoŚ
IIb. Obliczenia dla N=1,2,3,...
. � =
�
−1
�
�−1 �
+�
−1
�
�
�
−1 �
(7.5)
.
=
�
ℎ
−
(7.6)
. ℎ = ℎ
−
+ �
(7.7)
. � =
−
�
−
−
−
�
�
�
−
(7.8)
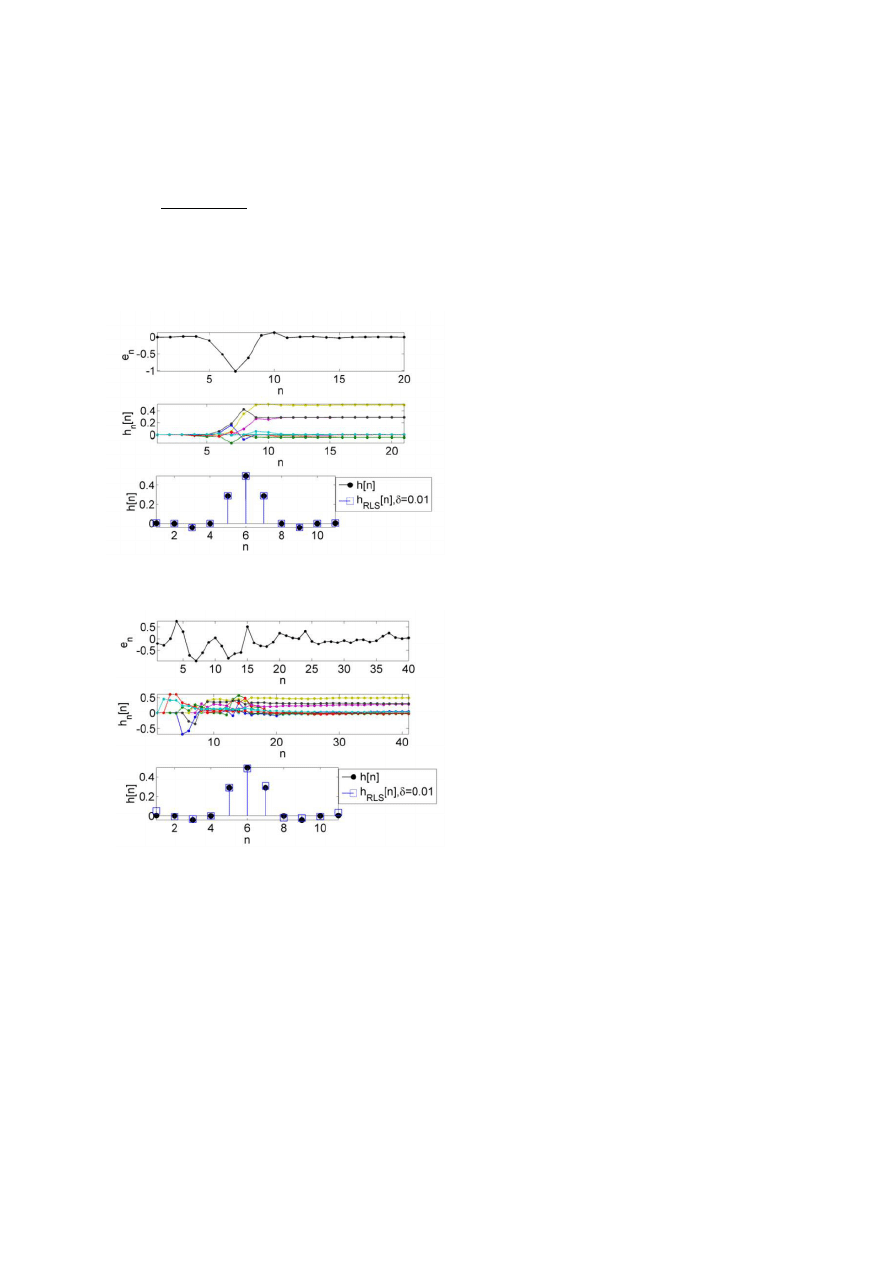
Rys.5 Identyfikacja odpowiedzi impulsowej filtrem
RLS -
pomiar bez zakłóceń.
Rys. 6 Identyfikacja odpowiedzi impulsowej filtrem
RLS -
pomiar zakłócony szumem addytywnym.
Pierwszy przebieg w rys.5 przedstawia
wyniki identyfikacji odpowiedzi impulsowej układu
LTI za pomocą filtra RLS. Wej ciowym sygnałem
testowym x[n
] był szum o rozkładzie normalnym, a
sygnałem odniesienia d[n] odpowiedź układu
identyfikowanego na to wymuszenie zarejestrowana
bez zakłóceń. rodkowy wykres rys.6 przedstawia
błąd dopasowania w kolejnych chwilach czasu. Błąd
ten szybko maleje, co oznacza, że sygnały x[n] i d[n]
zostały dopasowane. Dolny przebieg rys. 6
przedstawia współczynniki filtra w kolejnych
chwilach czasu. Algorytm został uruchomiony z
początkowymi współczynnikami filtra równymi zeroś
w kolejnych iteracjach współczynniki filtra szybko
osiągają warto ci zadane. Dolny przebieg rys.5
przedstawia
odpowiedź
impulsową
układu
identyfikowanego h[n
] i współczynniki odpowiedzi
impulsowej wyznaczone filtrem RLS w N=21 iteracji.
Rys.6 przedstawia wykresy analogiczne do rys.5 dla
przypadku, kiedy sygnał odniesienia d[n] został
zarejestrowany z zakłóceniem w postaci szumu
addytywnego. Rys.6 (
dolna czę ć) przedstawia
odpowiedź impulsową układu identyfikowanego h[n] i
współczynniki odpowiedzi impulsowej wyznaczone
filtrem RLS w N=41 iteracji.
8. Podsumowanie
Zaobserwowano podobne wyniki dla metody
identyfikacji z użyciem aproksymacji funkcjami
sklejanymi.
Przykładowo dla parametru a
0
i b
0
metoda
daje nam lepsze wyniki niż metoda identyfikacji w
oparciu o filtracje. W metodzie aproksymacyjnej
otrzymano
poprawne
identyfikowane
parametry
wcze niej o długo ć okna h metody splotowej.
Natomiast dla pozostałych parametrów można
zauważyć gorsze wyniki.
Problem filtracji optymalnej w sensie
najmniejszych kwadratów sprowadza się do
odwrócenia macierzy R=A
H
A
. Rozwiązanie jest
uzyskiwane dla całego wektora dostępnych danych,
tzn. blokowo. Innym sposobem uzyskania rozwiązania
jest adaptacyjny algorytm rekurencyjny RLS, który
wyznacza współczynniki filtra h[n] w miarę jak
napływają kolejne próbki sygnału.
9. Literatura
[1] K.
DudaŚ Analiza sygnałów biomedycznych,
Kraków 2010, str. 145-161
[2]
T. P. ZielińskiŚ Cyfrowe przetwarzanie sygnałów
– od teorii do zastosowania, wydanie1, Warszawa
2005, str. 247-286
[3]
M. Pionke, Ł. TuzŚ Projekt „Zastosowania
procesorów sygnałowych”. Demonstracja filtracji
adaptacyjnej, Gdańsk 2008
[4]
M. W. NowakŚ Metody identyfikacji układów
ciągłych z wykorzystaniem funkcji modulujących
i sklejanych i ich zastosowanie w regulatorze
adaptacyjnym, Kraków 2007
[5] D.
Rzepka,
P.
Otfinowski:
Identyfikacja
systemów
nieliniowych
przy
pomocy
kernelowego algorytmu LMS z ograniczeniem
zasobów
Wyszukiwarka
Podobne podstrony:
1 Identyfikacja obiektow sterow Nieznany (2)
IDENTYFIKACJA OBIEKTU, SGGW Technika Rolnicza i Leśna, Automatyka, Sprawozdania
Identyfikacja obiektów sterowania v2pop, Wydzia? Elektryczny
Identyfikacja obiektów sterowania 9, Wydzia? Elektryczny
5 Identyfikacja obiektów niebezpiecznych 01
Identyfikacja obiektów sterowania 3, Politechnika Lubelska
IDENTYF 27-01.DOC, IDENTYFIKACJA OBIEKTÓW DYNAMICZNYCH
AUTO - Identyfikacja obiektu, SGGW Technika Rolnicza i Leśna, Automatyka
filtracja adaptacyjna, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, Teoria i Przetwarz
Ćw 1 07word wer finalna2
czujniki pomiarowe, identyfikacja obiektu
Identyf obiektow sterowania mojeeeeeee
Identyfikacja obiektu sterowania
tr cw 3 identyfikacja obiektu sterowania
Identyf obiektow sterowania mojeeeeeee
1 Identyfikacja obiektow sterow Nieznany (2)
Identyfikacja obiektu
więcej podobnych podstron