
dr in
ż
. Stefan Brock
1
Nietrafne prognozy dotycz
ą
ą
ą
ą
ce regulatorów PID
◮ 1982: The ASEA Novatune Team 1982 (Novatune is a useful
general digital control law with adaptation):
PID Control will soon be obsolete
◮ 1989: Conference on Model Predictive Control:
Using a PI controller is like driving a car only looking at the
rear view mirror: It will soon be replaced by Model Predictive
Control.
◮ 2002: Desborough and Miller (Honeywell):
Based on a survey of over 11000
controllers in the refining, chemicals
and pulp and paper industries, 98% of
regulatory
controllers
utilise
PID
feedback
*) B. Bernhardsson, K.J. Åström Control System Design – PID Control , 2007
Seminarium ZSIEP 04-IV-2008
• Zdecydowana wi
ę
kszo
ść
regulatorów
w praktycznych układach sterowania (nie tylko nap
ę
dowych)
to regulatory PI/PID
• W przeciwie
ń
stwie do innych regulatorów mo
ż
na je łatwo
nastawia
ć
eksperymentalnie, równie
ż
przy niepełnej wiedzy
o obiekcie sterowania; reguły post
ę
powania s
ą
(powinny
by
ć
)
dobrze znane in
ż
ynierom.
• Wzgl
ę
dnie łatwe: samostrojenie i adaptacja
• Wyniki uzyskane w układzie z regulatorem
PI/PID mog
ą
by
ć
baz
ą
do porówna
ń
z innymi
metodami sterowania
Dlaczego warto zajmowa
ć
si
ę
regulatorami PI/PID
dr in
ż
. Stefan Brock
2
Jak
nie nale
ż
y
my
ś
le
ć
o regulatorach
10
)
(
m
G
f
C
=
*) K.J. Åström, H.Panagopoulos, T. Hägglund , Automatica vol. 34, no 5, 1998
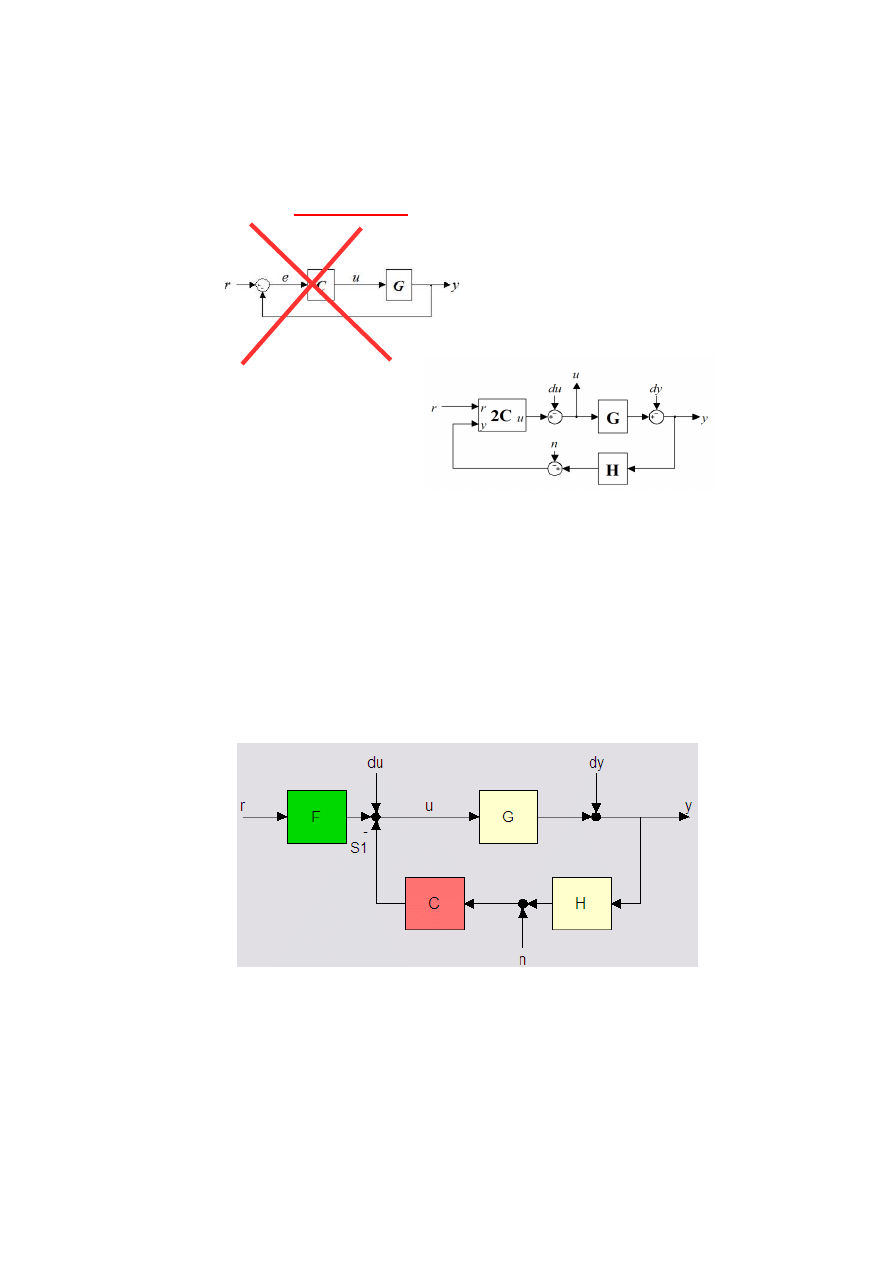
• niepełna struktura
• tylko reakcja r
→
y
• bezalternatywno
ść
nastaw
• dwa stopnie swobody
(2DOF)
• po pierwsze : C
y->u
• reakcja na zakłócenia
• wra
ż
liwo
ść
na zmiany G
m
• kompromis mi
ę
dzy szybko
ś
ci a odporno
ś
ci
ą
*)
• C
r->u
mniej krytyczne
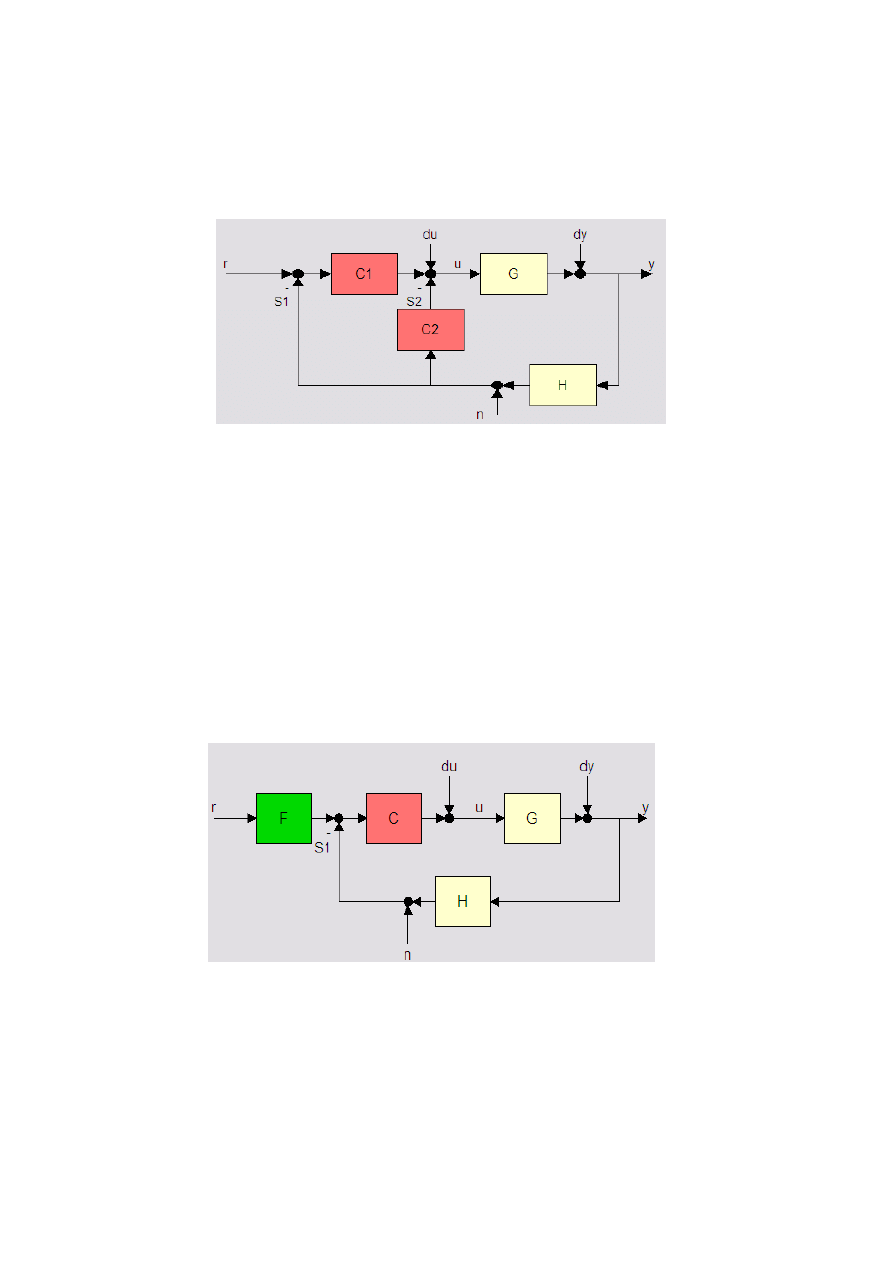
Kilka struktur regulatora 2DOF
11
Matlab7 / Control System Toolbox / Siso Design Tool
a
dr in
ż
. Stefan Brock
3
Kilka struktur regulatora 2DOF
12
Matlab7 / Control System Toolbox / Siso Design Tool
b
Kilka struktur regulatora 2DOF
13
Matlab7 / Control System Toolbox / Siso Design Tool
c
dr in
ż
. Stefan Brock
4
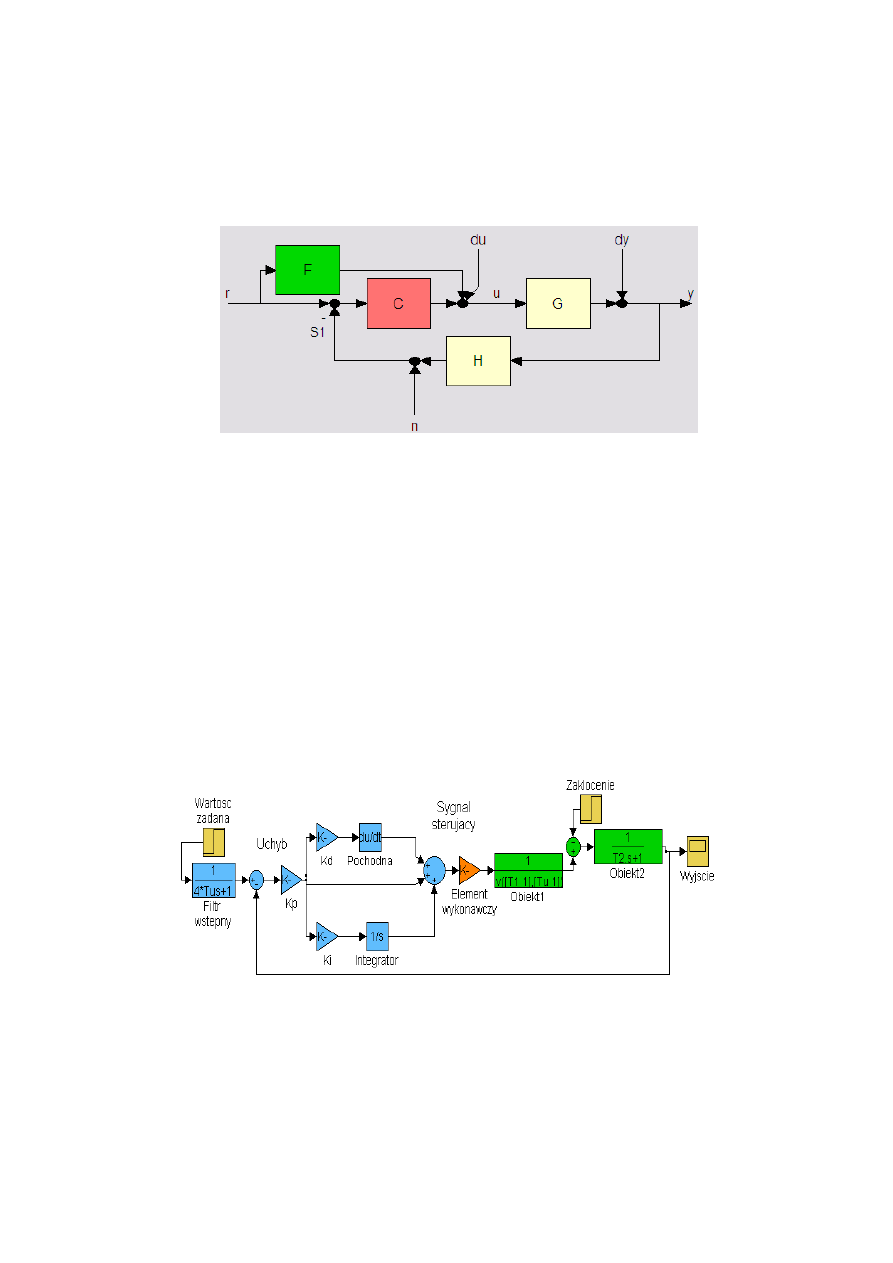
Kilka struktur regulatora 2DOF
14
Matlab7 / Control System Toolbox / Siso Design Tool
d
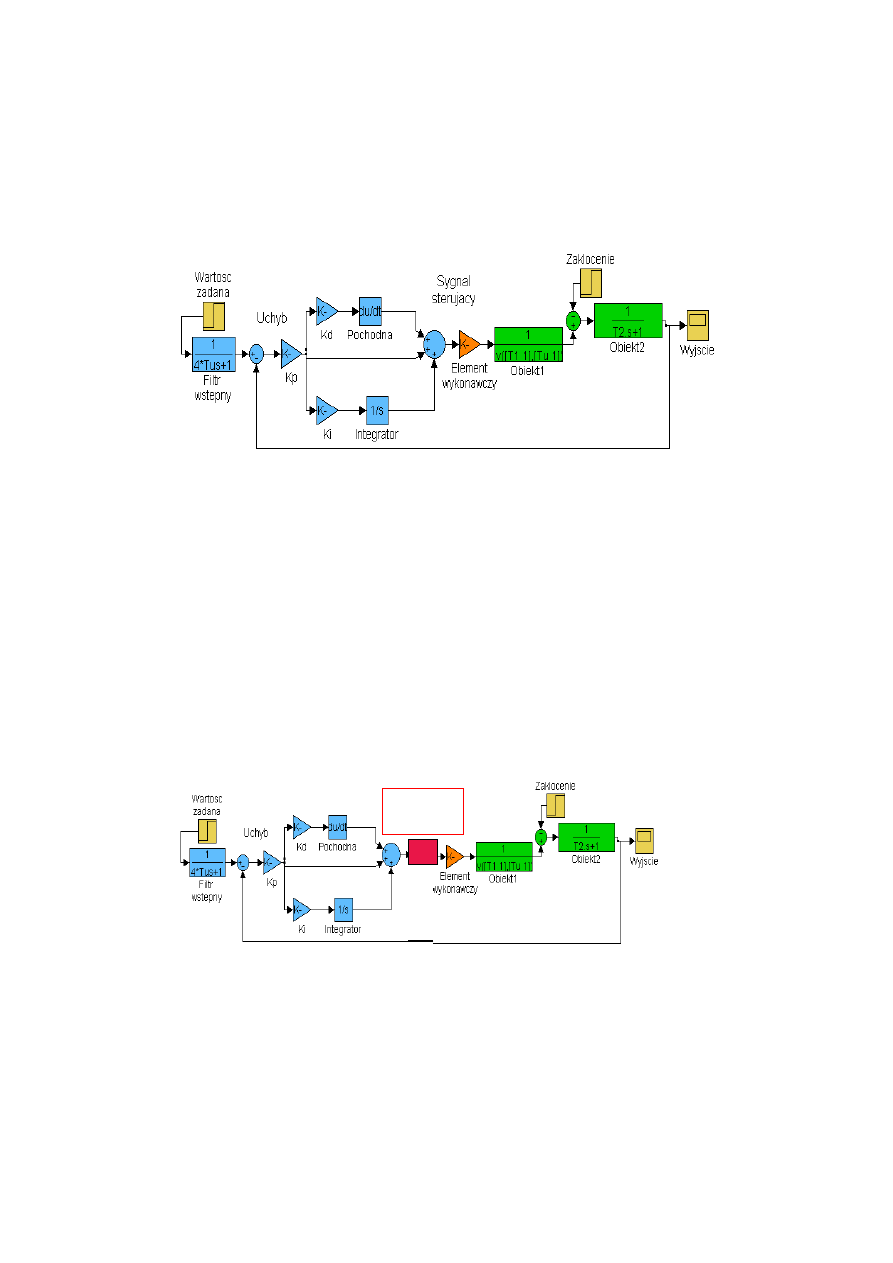
Schemat regulatora PID bez
ogranicze
ń
u = K
P
(e + K
i
∫e + K
d
(de/dt))
dr in
ż
. Stefan Brock
5
ISA: International Society of
Automation
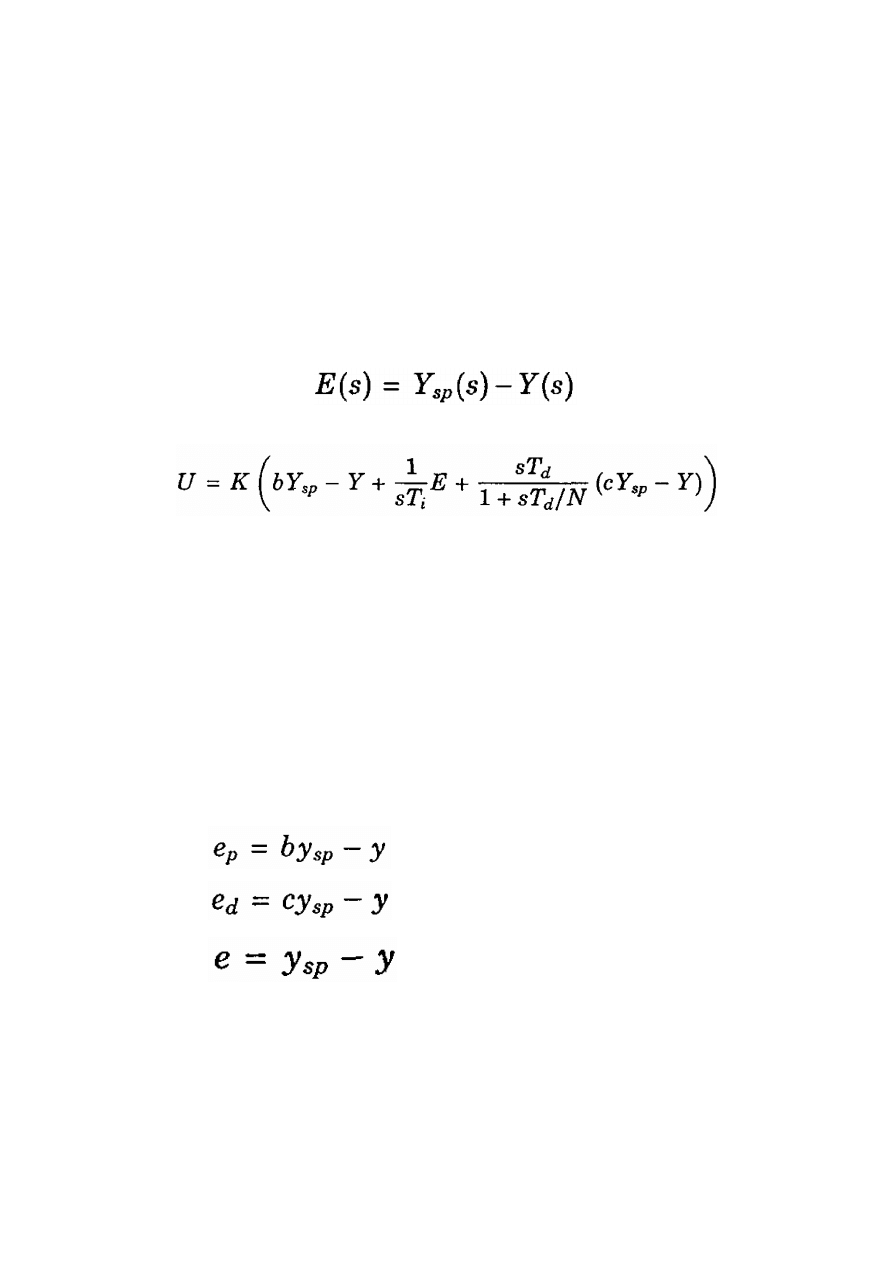
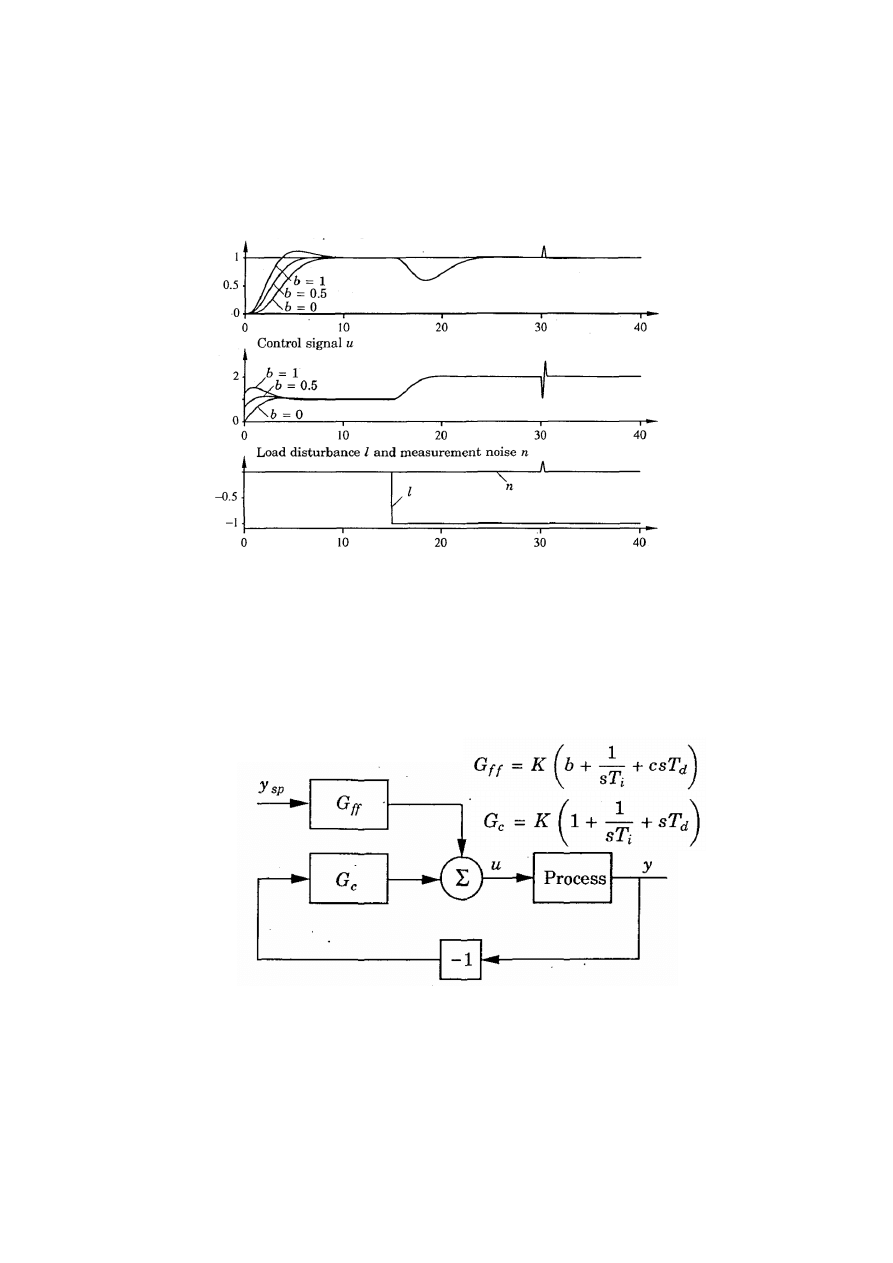
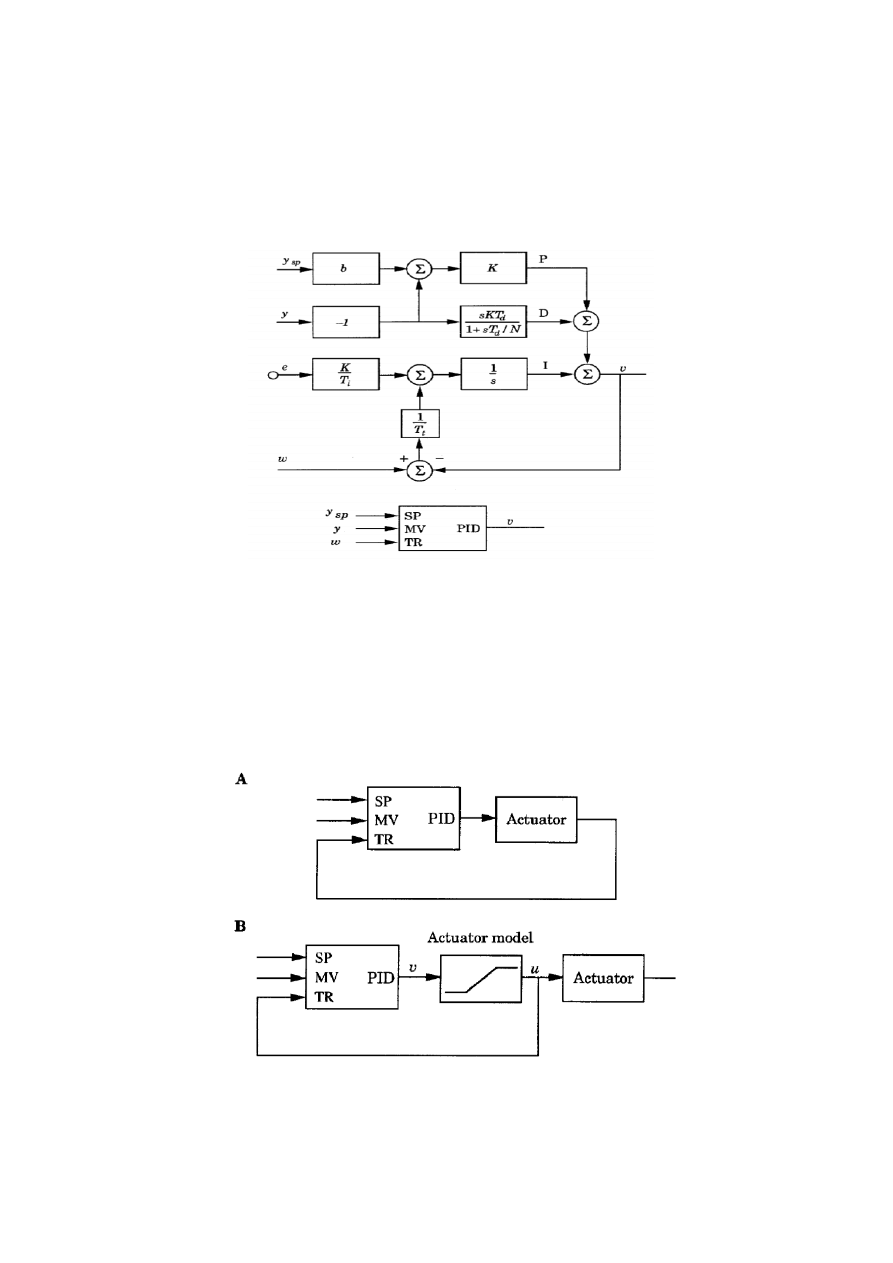
Standardowe formy regulatora PID –
zastosowania w regulatorach
przemysłowych.
Forma I:
Współczynniki wagowe sygnału
zadanego
Ró
ż
ne definicje uchybu dla cz
ęś
ci P, I, D.
Współczynniki b i c wpływaj
ą
na reakcj
ę
układu na sygnał zadany, nie zmieniaj
ą
c
reakcji na zakłócenie
W praktyce najcz
ęś
ciej
c = 0
dr in
ż
. Stefan Brock
6
Wpływ współczynnika b
Regulator o 2 stopniach swobody
Gdy b=1 i c=0 – regulator o strukturze PI-D
Gdy b=0 i c=0 – regulator o strukturze I-PD
dr in
ż
. Stefan Brock
7
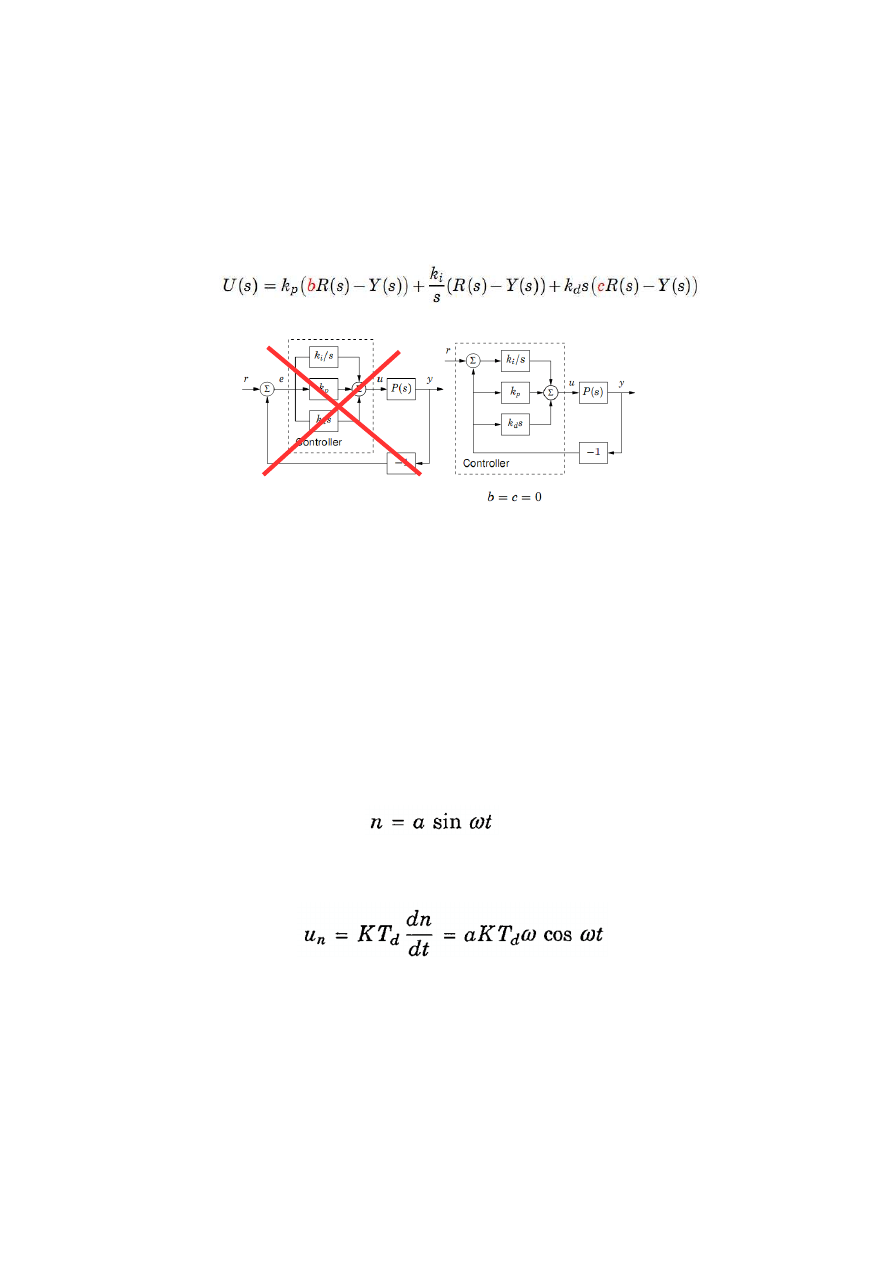
20
Regulator PID z współczynnikami wag wartości
zadanej (‘Poor man’s 2DOF’ *)
*) B. Bernhardsson, K.J. Åström Control System Design – PID Control , 2007
b = c = 1
Wpływ szumów pomiarowych
Sinusoidalne szumy pomiarowe
Składowa sygnału steruj
ą
cego wynikaj
ą
ca z
szumu pomiarowego
Dla du
ż
ych cz
ę
stotliwo
ś
ci składowa u
n
ma
du
żą
amplitud
ę
. Ograniczenie poprzez filtr
dolnoprzepustowy.
dr in
ż
. Stefan Brock
8
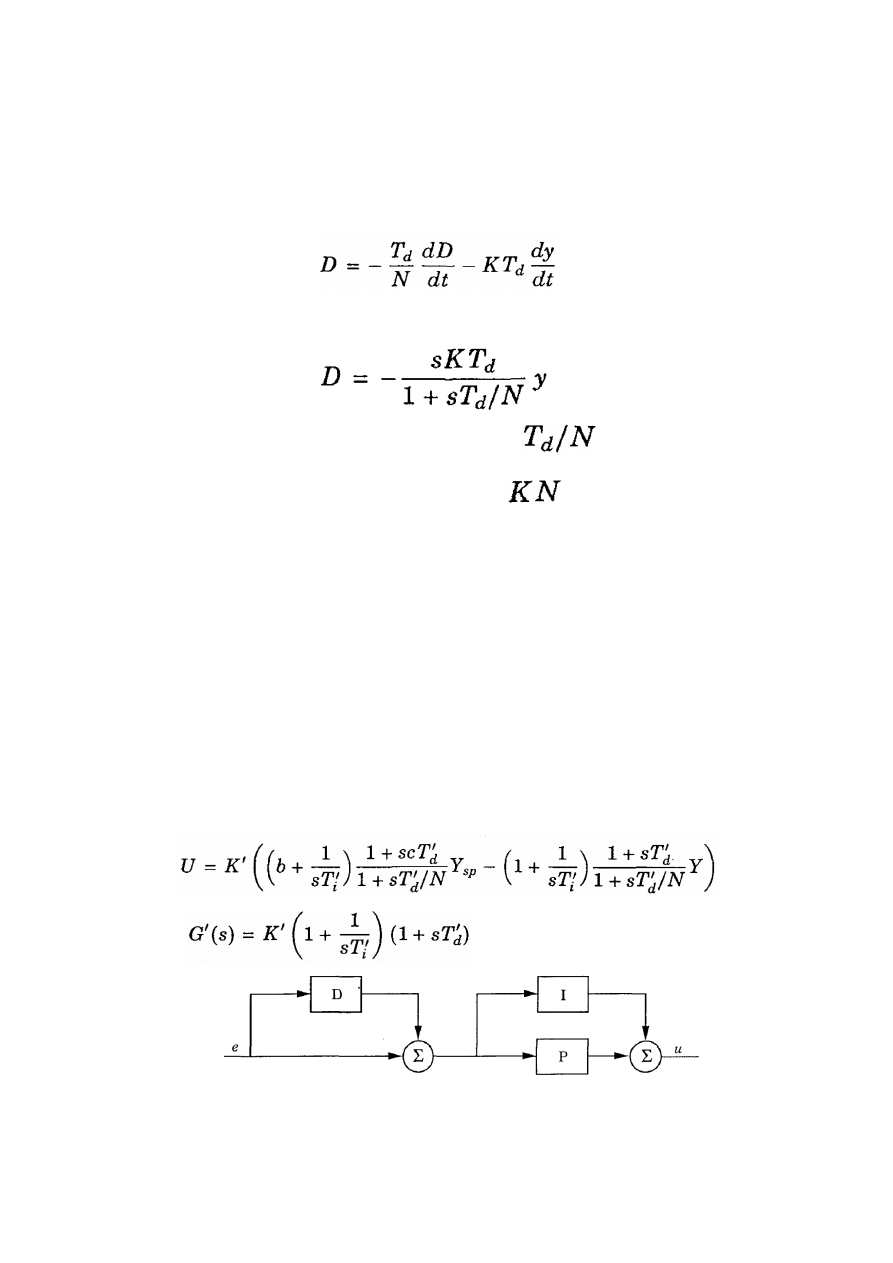
Posta
ć
czasowa równania cz
ęś
ci D dla c=0
Równanie operatorowe cz
ęś
ci D dla c=0
Stała czasowa filtru 1 rz
ę
du:
Maksymalne wzmocnienie
szumów pomiarowych:
Typowe warto
ś
ci N: 8 - 20
Alternatywne formy regulatora PID
Forma II (szeregowa):

dr in
ż
. Stefan Brock
9
Relacje mi
ę
dzy parametrami
form I i II
Forma III (równoległa):
dr in
ż
. Stefan Brock
10
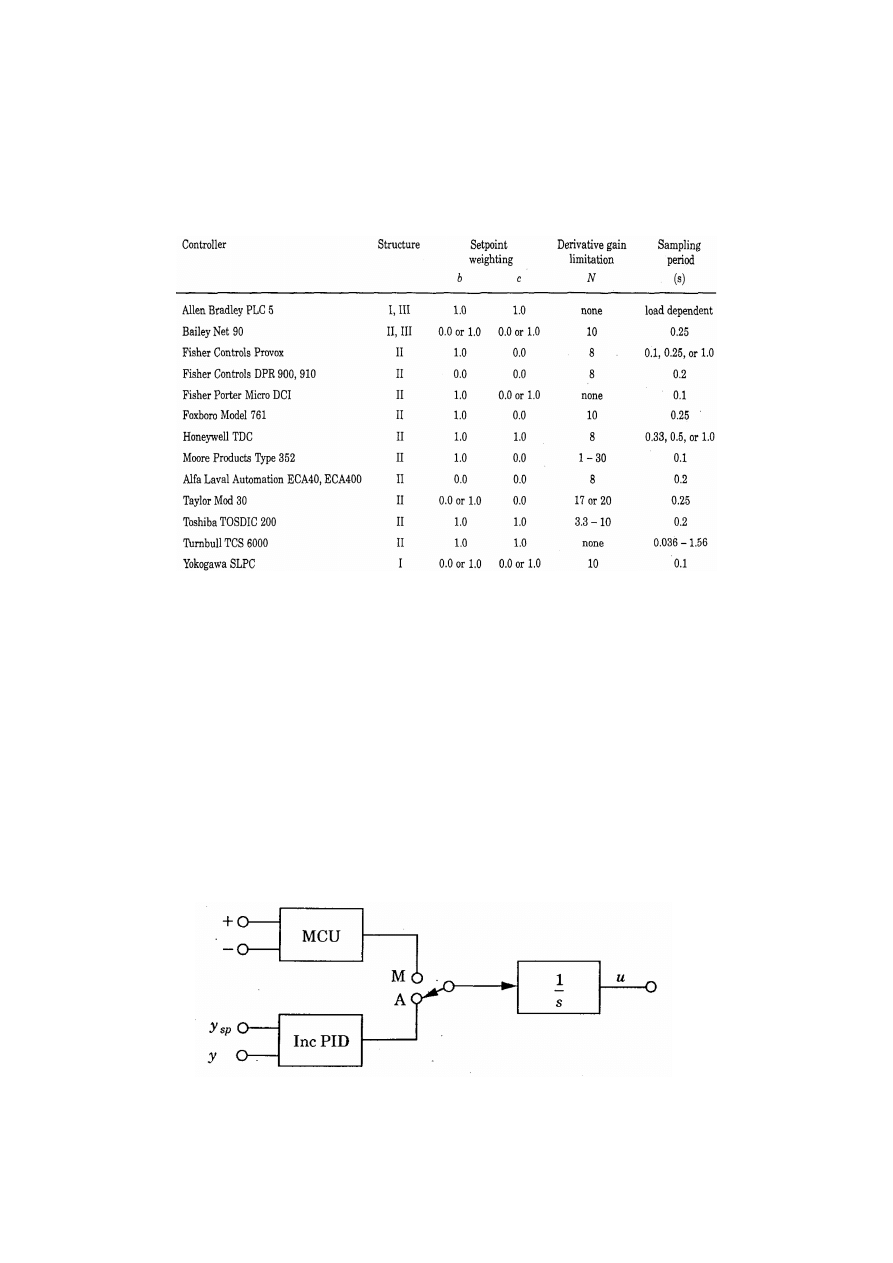
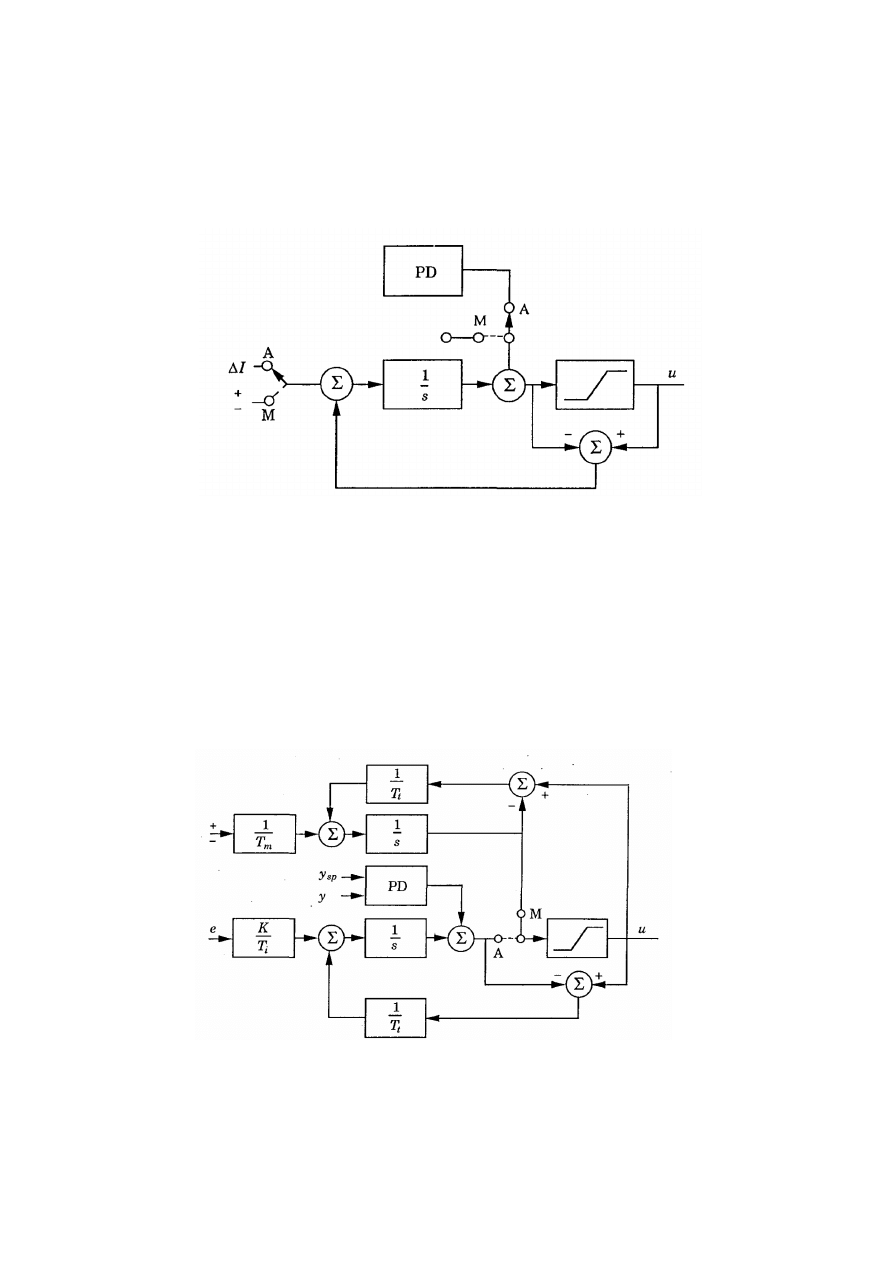
Parametry regulatorów przemysłowych
Bezuderzeniowe (bumpless)
przeł
ą
czanie trybu pracy Manual/Auto
Regulator w formie pr
ę
dko
ś
ciowej
MCU – Manual Control Unit
dr in
ż
. Stefan Brock
11
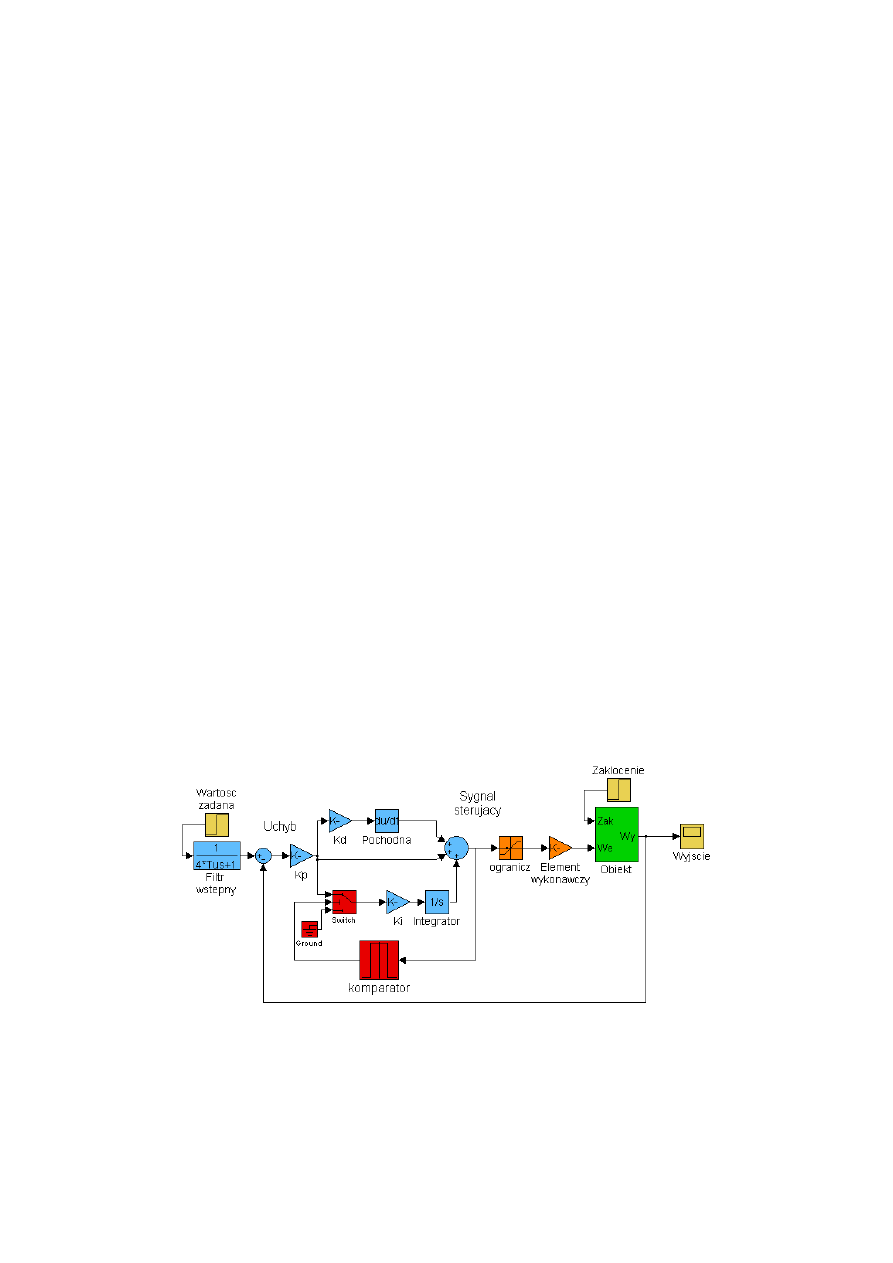
Schemat regulatora PID bez
ogranicze
ń
u = K
P
(e + K
i
∫e + K
d
(de/dt))
Schemat regulatora PID z ograniczeniem
u = limit(K
P
(e + K
i
∫e + K
d
(de/dt)))
Limit ±U
max
dr in
ż
. Stefan Brock
12
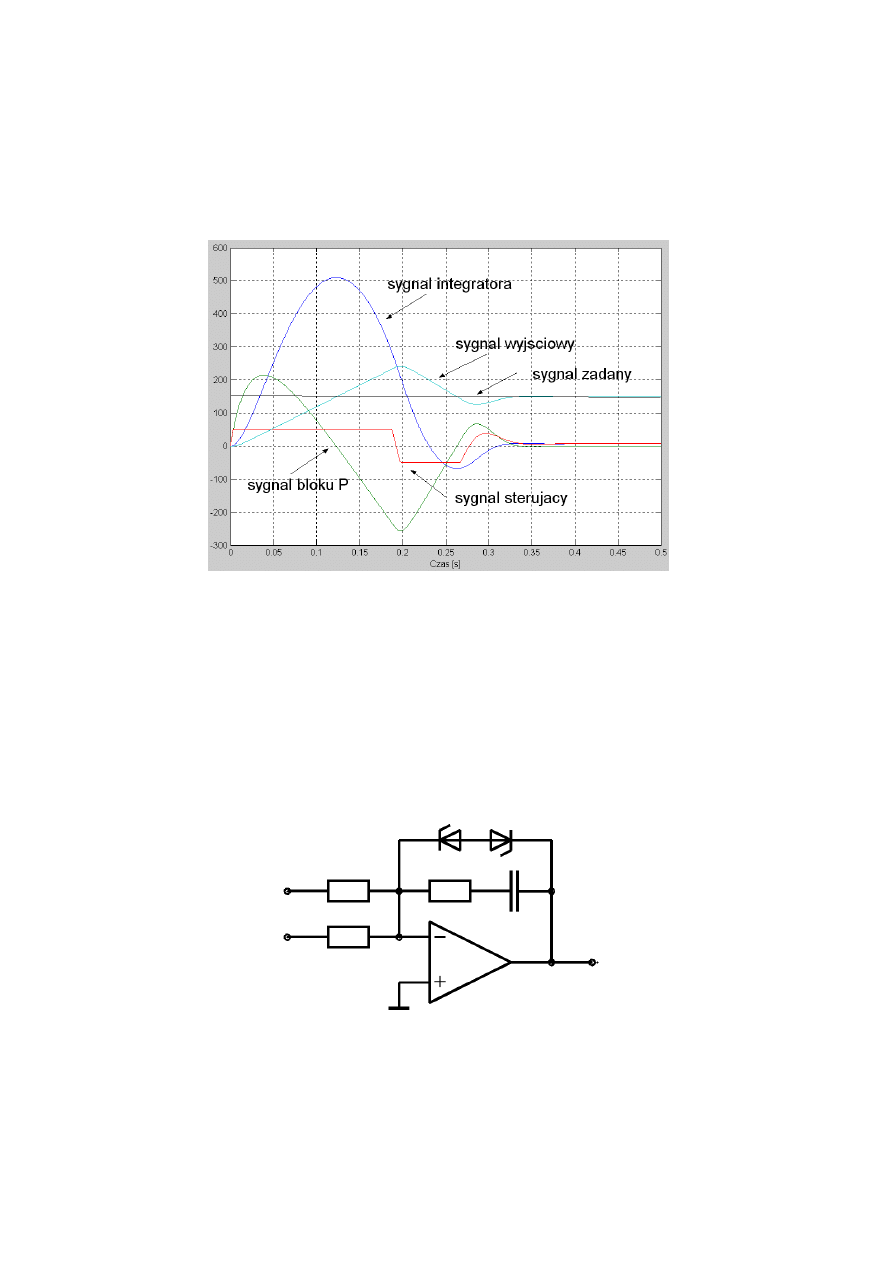
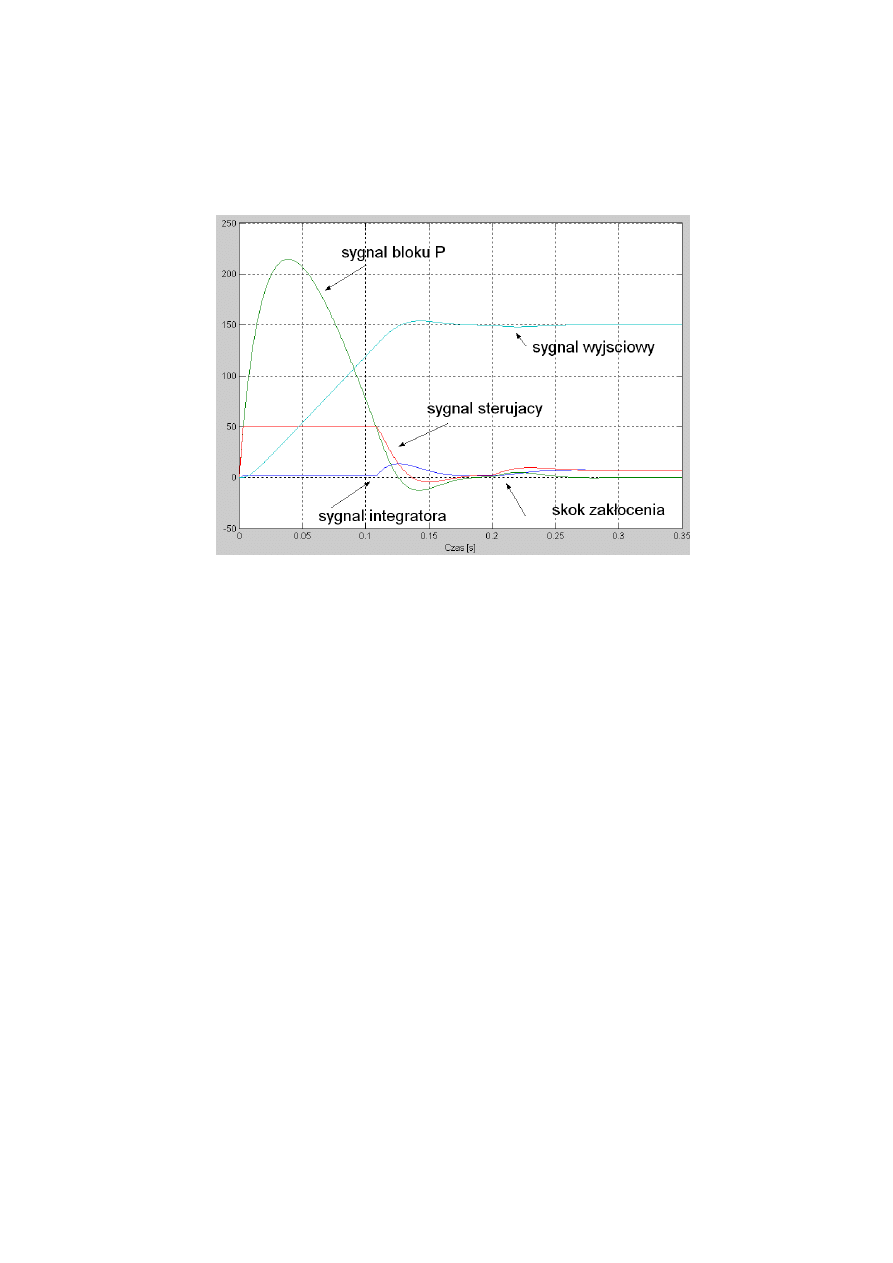
Efekt nasycenia w cyfrowej realizacji
algorytmu PID:
wind-up
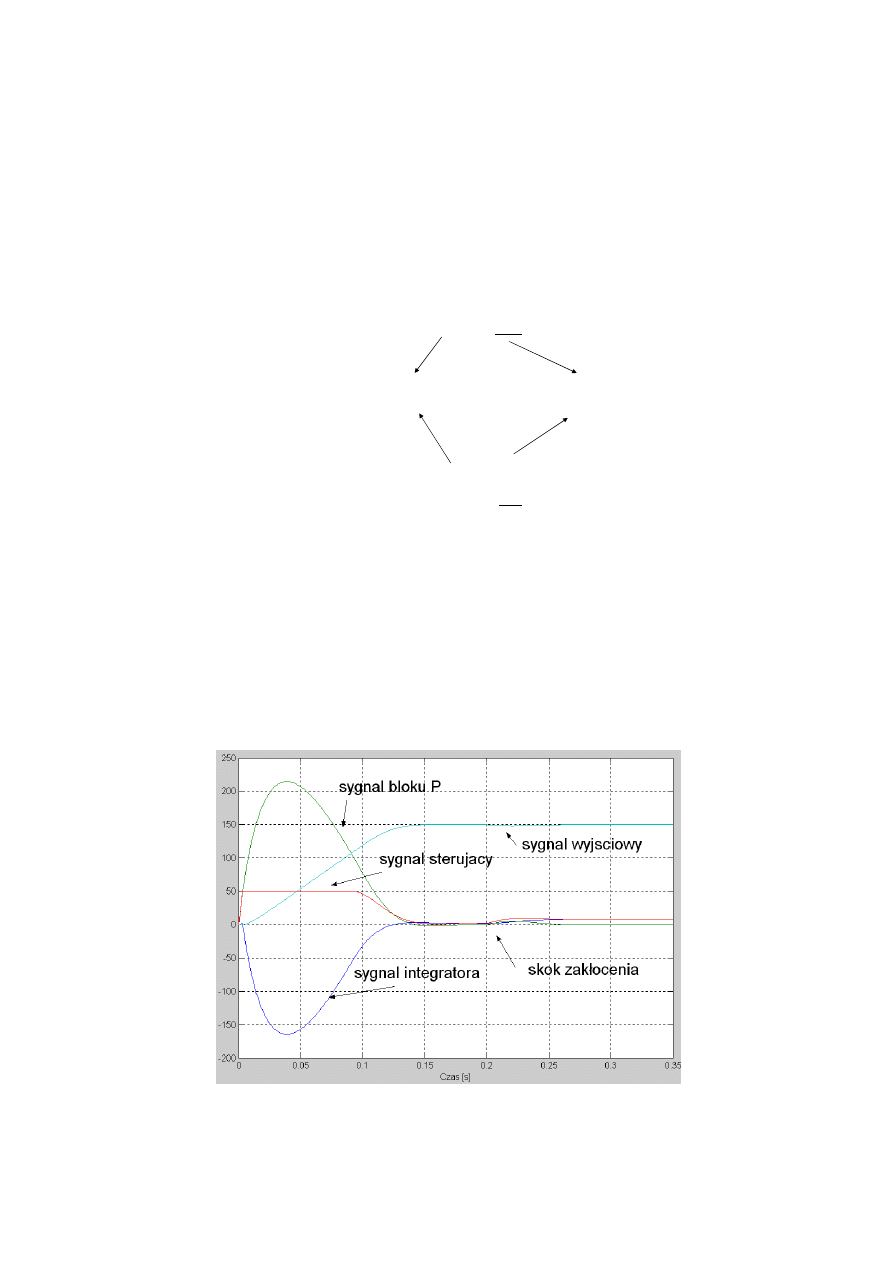
Eliminacja efektu wind-up w
układzie analogowym
dr in
ż
. Stefan Brock
13
Rozwi
ą
zania układu anti wind-
up
• Regulator PI ze zmiennymi ograniczeniami
• Warunkowe całkowanie
• Ograniczone całkowanie
•
Ś
ledz
ą
cy układ anti wind-up
• Zmodyfikowany,
ś
ledz
ą
cy układ
anti wind-up.
• Zarz
ą
dzaniem uchybem (error governor)
Regulator PI ze zmiennymi
ograniczeniami
• Zmienne ograniczenie jest
wprowadzone w gał
ę
zi z integratorem,
tak by sumaryczny sygnał wyj
ś
ciowy nie
przekraczał zadanych warto
ś
ci.
• Algorytm dla regulatora PI
• zale
ż
nie od znaku uchybu, człon
całkuj
ą
cy u
i
w ka
ż
dym kroku jest
ustawiany na warto
ść
odpowiednio
min(u
i
, u
max
– u
p
) lub max(u
i
, u
max
– u
p
).
dr in
ż
. Stefan Brock
14
Regulator PI ze zmiennymi
ograniczeniami
1. u
p
= K
p
e oraz u
i
*
= u
i
+K
i
*dt*e
2. gdy e = 0 to wtedy u
i
= u
i
*
3. gdy e > 0 to u
i
= min (u
i
*
, u
max
– u
p
)
nie ma nasycenia jest
nasycenie
4. gdy e < 0 to u
i
= max (u
i
*
, u
min
– u
p
)
5. u = u
p
+ u
i
Regulator PI ze zmiennymi
ograniczeniami
dr in
ż
. Stefan Brock
15
Warunkowe całkowanie
• W tej metodzie integrator jest wł
ą
czany lub
wył
ą
czany
zale
ż
nie
od
ustalonych
warunków:
– wielko
ść
sygnału wyj
ś
ciowego regulatora
– sygnału uchybu.
• Najlepsze rezultaty s
ą
osi
ą
gane gdy
całkowanie jest wył
ą
czane kiedy sygnał
wyj
ś
ciowy jest w ograniczeniu i
jednocze
ś
nie sygnał wyj
ś
ciowy i sygnał
uchybu maj
ą
ten sam znak.
Warunkowe całkowanie
dr in
ż
. Stefan Brock
16
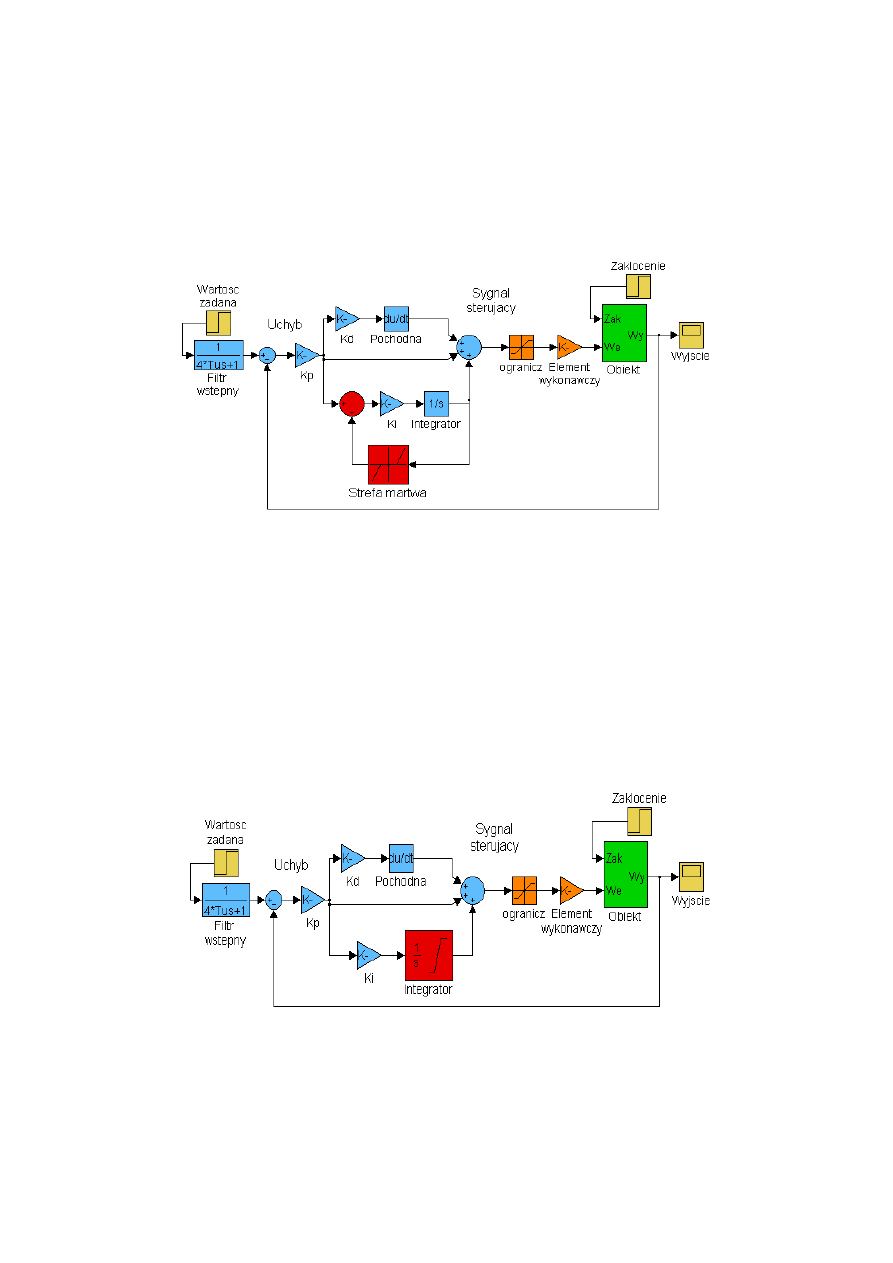
Warunkowe całkowanie
Ograniczone całkowanie
• Na wej
ś
cie integratora podawany jest
dodatkowy sygnał z wyj
ś
cia integratora,
przetworzony przez blok strefy martwej
o du
ż
ym współczynniku wzmocnienia.
• Wielko
ść
strefy martwej jest równa
zakresowi dopuszczalnego sygnału
wyj
ś
ciowego regulatora.
• W ten sposób sygnał wyj
ś
ciowy
integratora jest ograniczony do poziomu
wyznaczonego przez szeroko
ść
strefy
martwej
dr in
ż
. Stefan Brock
17
Schemat układu z ograniczeniem
integratora
Schemat układu z ograniczeniem
integratora
dr in
ż
. Stefan Brock
18
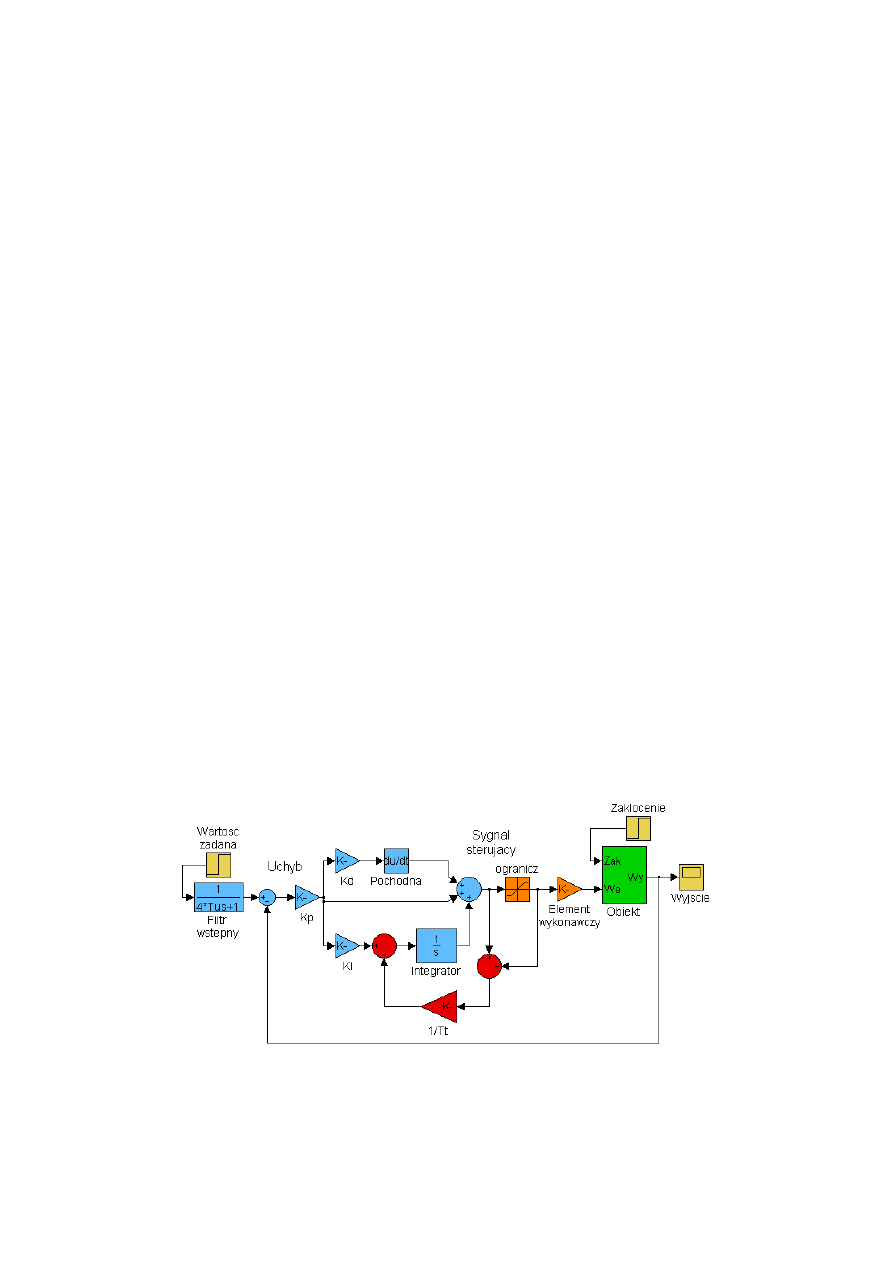
Ś
ledz
ą
cy układ anti wind-up
• Klasyczne rozwi
ą
zanie problemu wind-up.
• Gdy sygnał wyj
ś
ciowy z regulatora
przekracza zakres dopuszczalny, wytwarzany
jest sygnał sprz
ęż
enia zwrotnego.
• Sygnał ten jest równy ró
ż
nicy pomi
ę
dzy
sygnałami przed ograniczeniem i za
ograniczeniem.
• Ograniczenie mo
ż
e by
ć
wprowadzane
rzeczywi
ś
cie przez układ wykonawczy lub te
ż
mo
ż
e zosta
ć
zamodelowane w regulatorze.
Ś
ledz
ą
cy układ anti wind-up
k=1/T
t
T
t
= (0.1 ... 1)* T
i
dr in
ż
. Stefan Brock
19
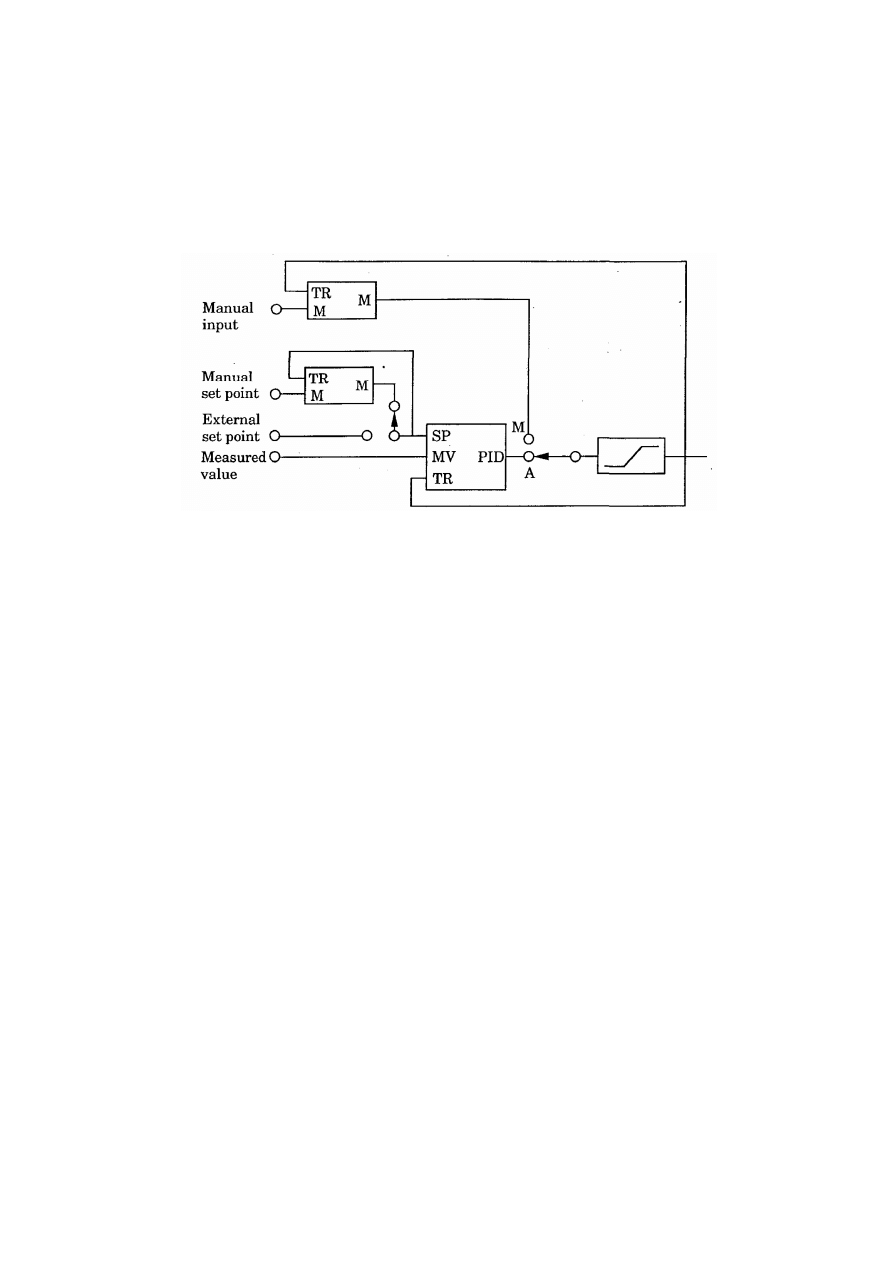
Przemysłowe regulatory PID
Przemysłowe regulatory PID
dr in
ż
. Stefan Brock
20
Regulator w formie standardowej z AWU
Wspólny blok całkuj
ą
cy
Regulator w formie standardowej z AWU
Rozdzielne bloki całkuj
ą
ce
dr in
ż
. Stefan Brock
21
Wystarczaj
ą
cy jest regulator PI
• gdy dynamika obiektu jest dobrze przybli
ż
ana
członem 1-rz
ę
du (poziom w pojedynczym
zbiorniku, proces mieszania,…);
• dla obiektów wy
ż
szego rz
ę
du, gdy wymagania
dynamiczne nie s
ą
ostre – cz
ęść
I zapewnia
eliminacj
ę
uchybu ustalonego, cz
ęść
P –
odpowiedni
ą
dynamik
ę
procesów przej
ś
ciowych.
dr in
ż
. Stefan Brock
22
Wystarczaj
ą
cy jest regulator PID
• gdy dynamika obiektu jest dobrze przybli
ż
ana
członem 2-rz
ę
du;
• gdy stałe czasow ró
ż
ni
ą
si
ę
znacznie (regulacja
temperatury); człon D przyspiesza reakcj
ę
układu regulacji;
• dla obiektów wy
ż
szego rz
ę
du, ograniczone jest
dopuszczalne wzmocnienie cz
ęś
ci P; człon D
poprawia tłumienie i pozwala zwi
ę
kszy
ć
wzmocnienie.
Regulator PID jest niewystarczaj
ą
cy
• Dla obiektów wy
ż
szego rz
ę
du.
dr in
ż
. Stefan Brock
23
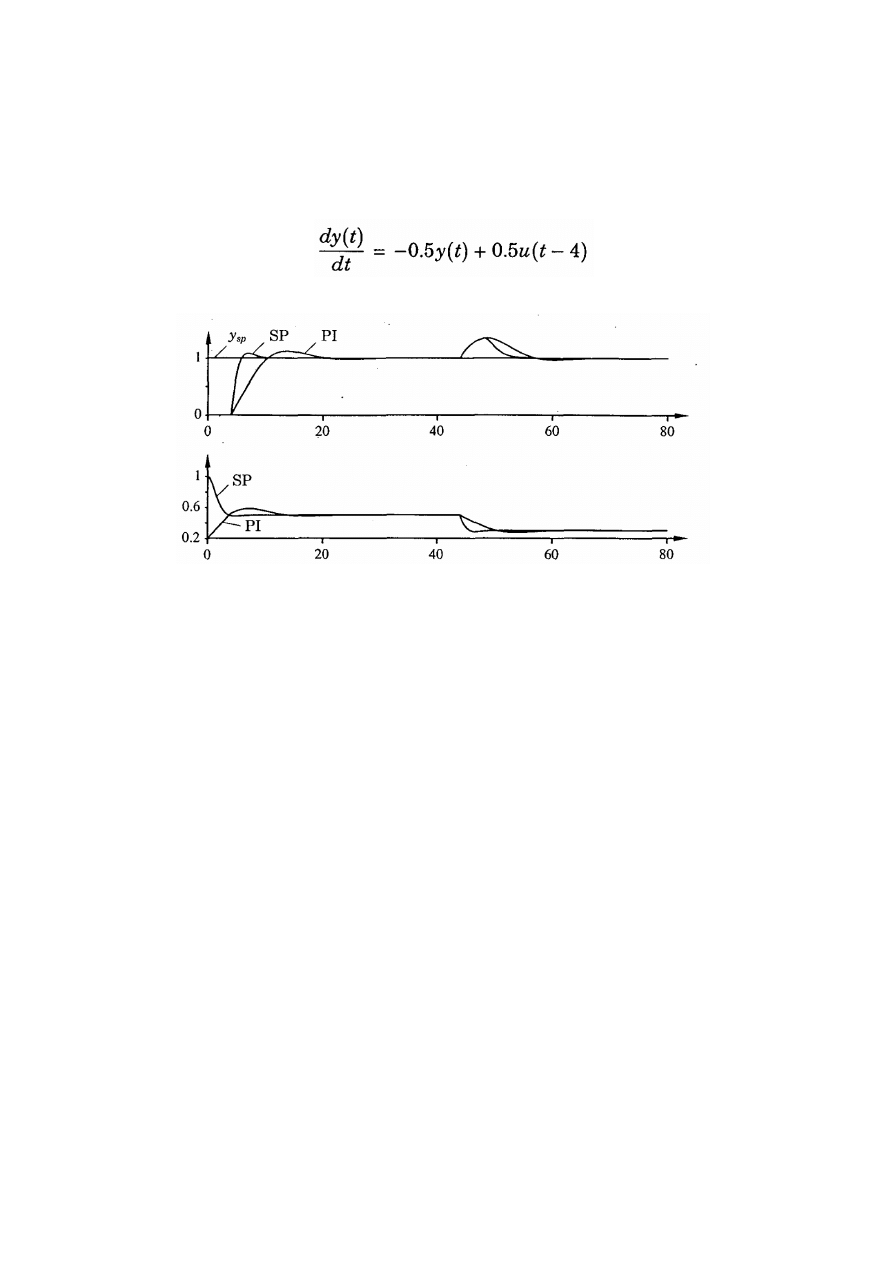
• Dla obiektów z długim czasem martwym
SP – regulator z predyktorem Smitha
Realizacja regulatora PID w S7-300
• blok regulatora PID dost
ę
pny w
standardowym zestawie instrukcji STEP-7
(elementarne mo
ż
liwo
ś
ci)
• bloki regulatora PID dost
ę
pne w
dedykowanym pakiecie rozszerzaj
ą
cym
„Standard PID Control” (rozbudowane
mo
ż
liwo
ś
ci)
• sprz
ę
towe moduły regulatora PID
(regulacja szybkich, zło
ż
onych procesów)
dr in
ż
. Stefan Brock
24
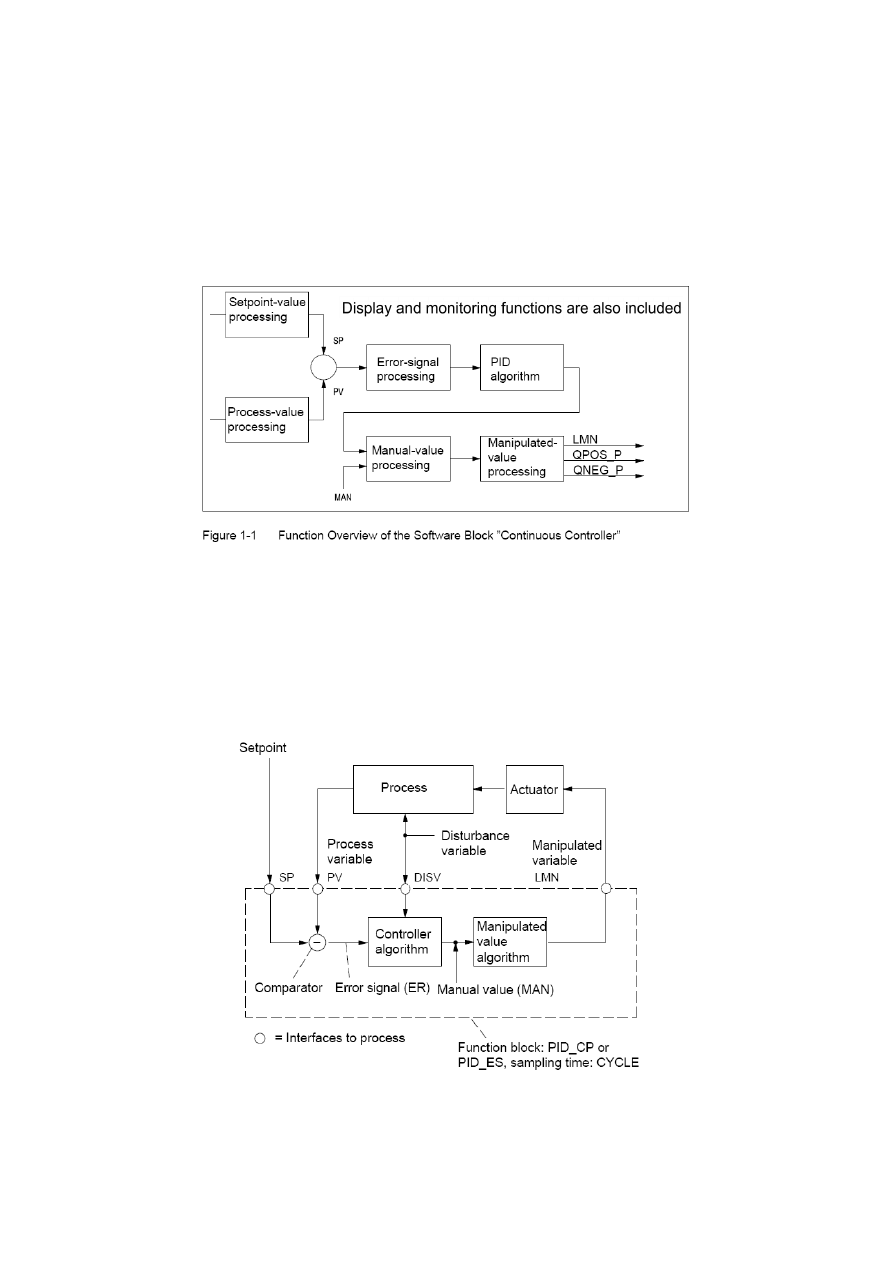
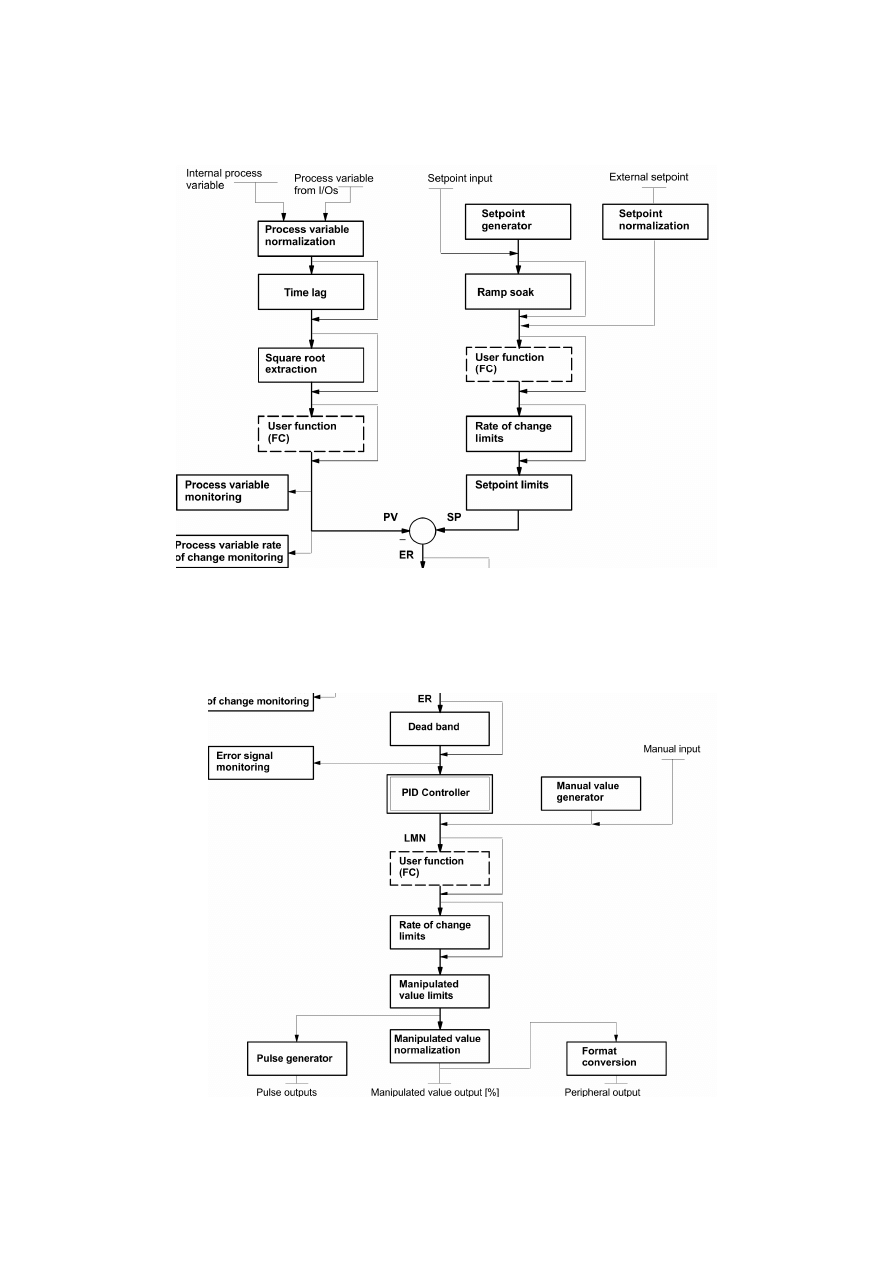
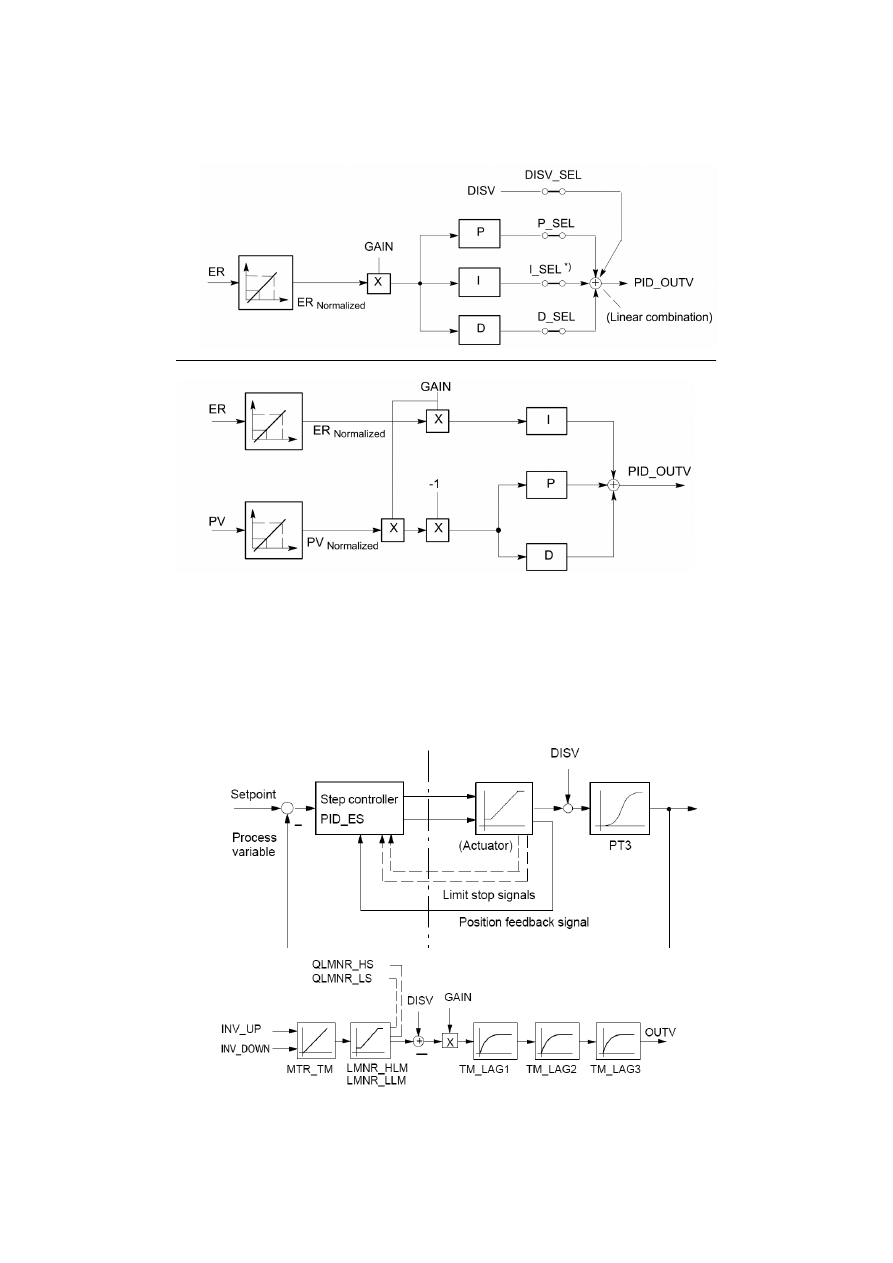
Pakiet „Standard PID Control”
Struktura bloku PID
dr in
ż
. Stefan Brock
25
Typy układów wykonawczych
• Układ wykonawczy proporcjonalny z ci
ą
głym
sygnałem wej
ś
ciowym (zawory proporcjonalne,
układu regulacji poło
ż
enia)
• Układ wykonawczy proporcjonalny z
impulsowym (PWM) sygnałem wej
ś
ciowym
(unipolarnym – otwarte/zamkni
ę
te lub
bipolarnym – w przód/w tył)
• Układy wykonawcze z akcj
ą
całkuj
ą
c
ą
i
trójstanowym sygnałem wej
ś
ciowym (ruch
nap
ę
du: otwieraj/stój/zamykaj)
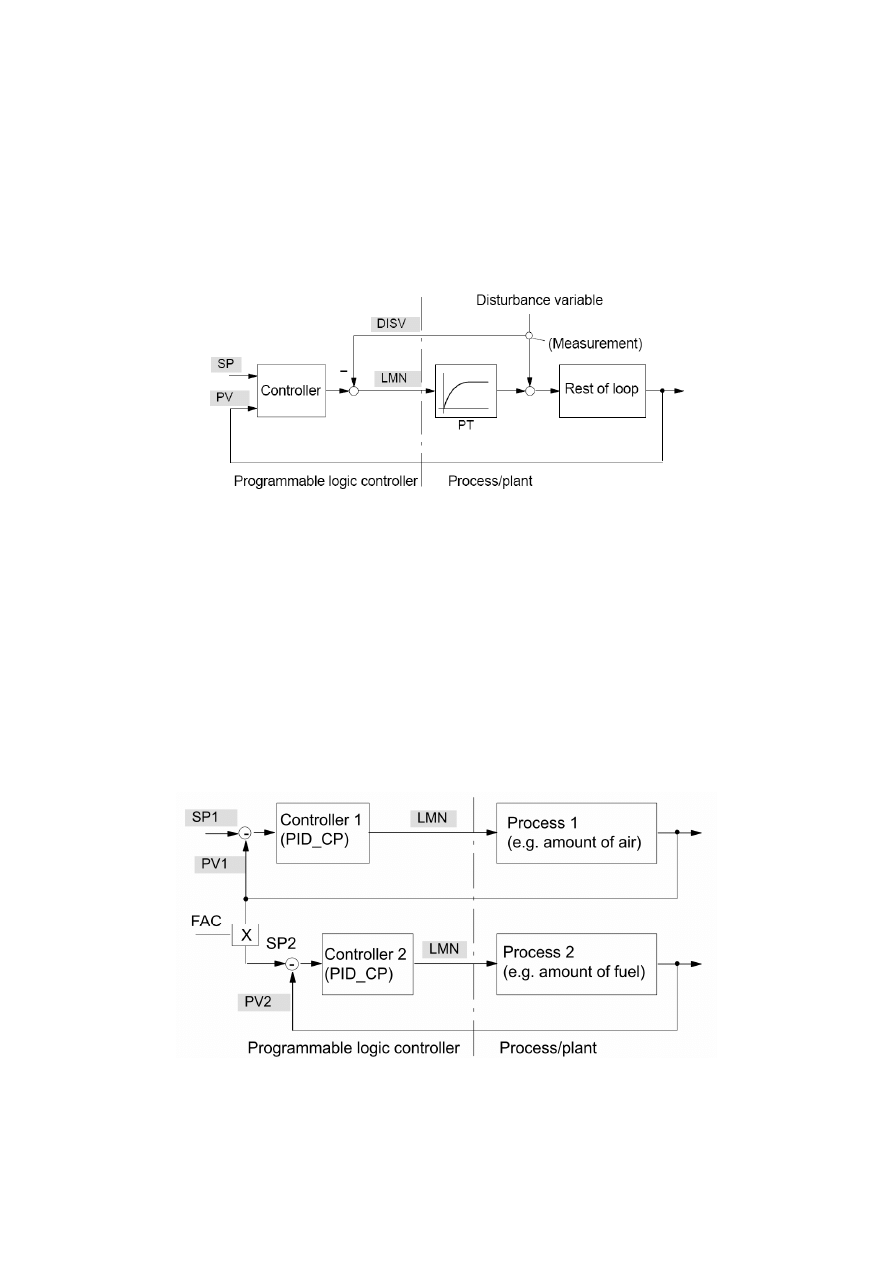
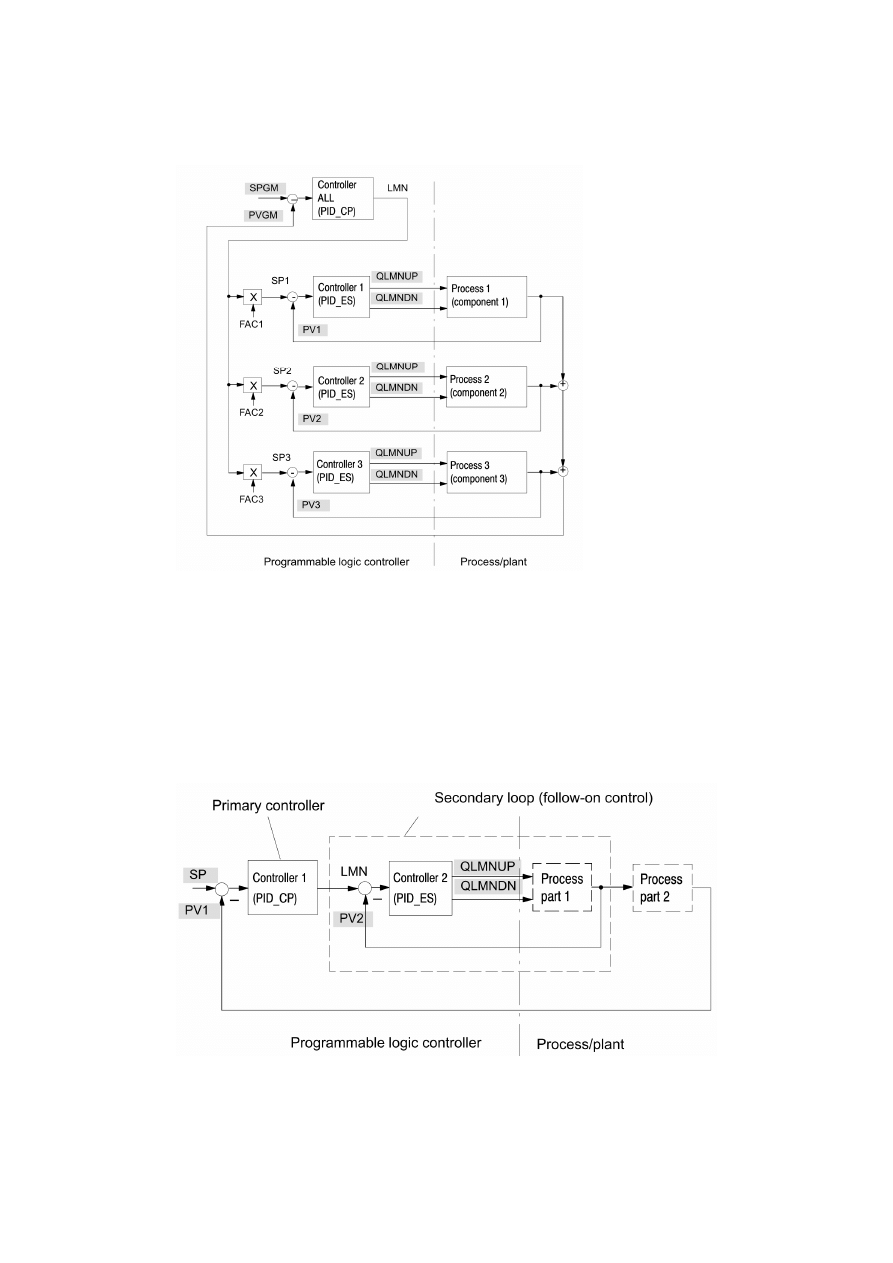
Bloki funkcyjne
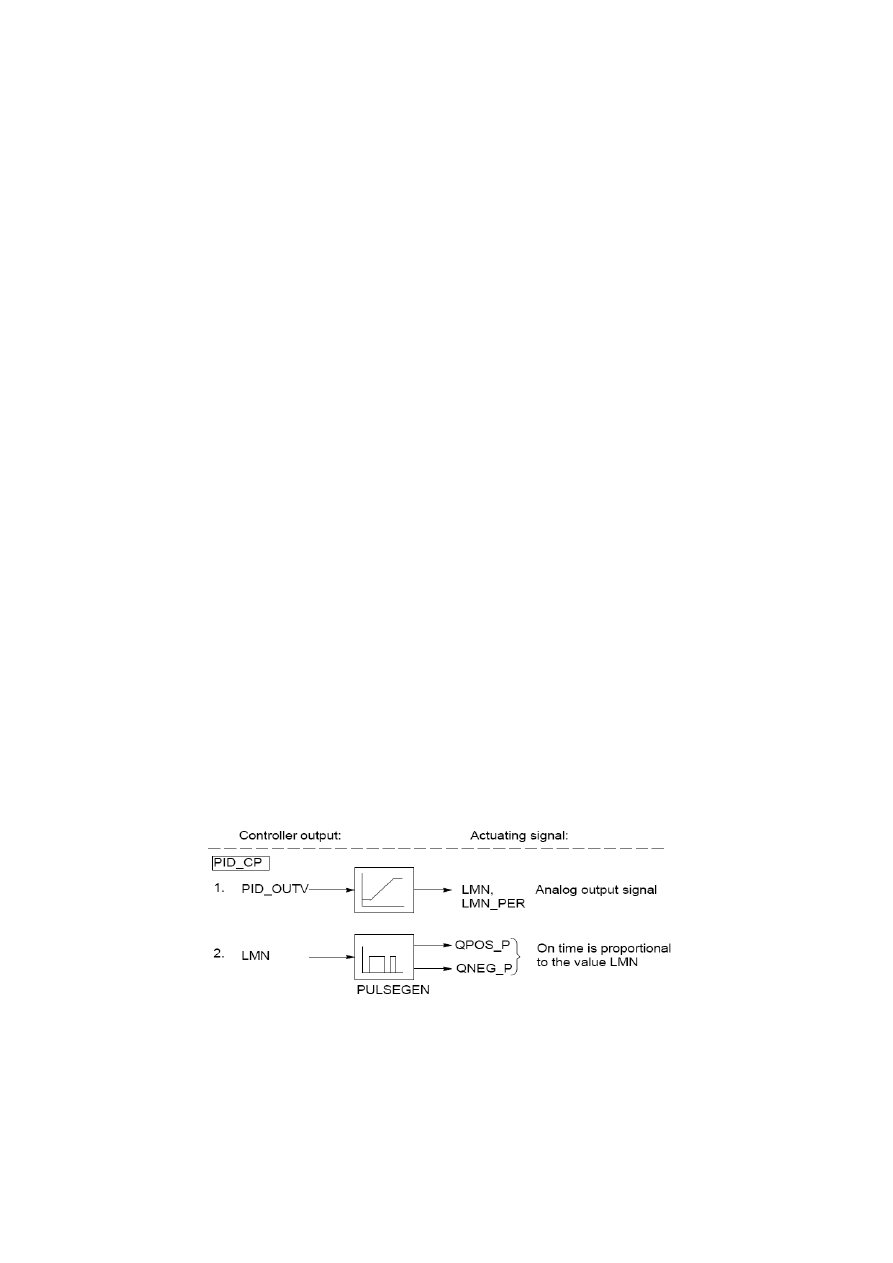
• PID_CP – regulator z wyj
ś
ciem ci
ą
głym
lub impulsowym
dr in
ż
. Stefan Brock
26
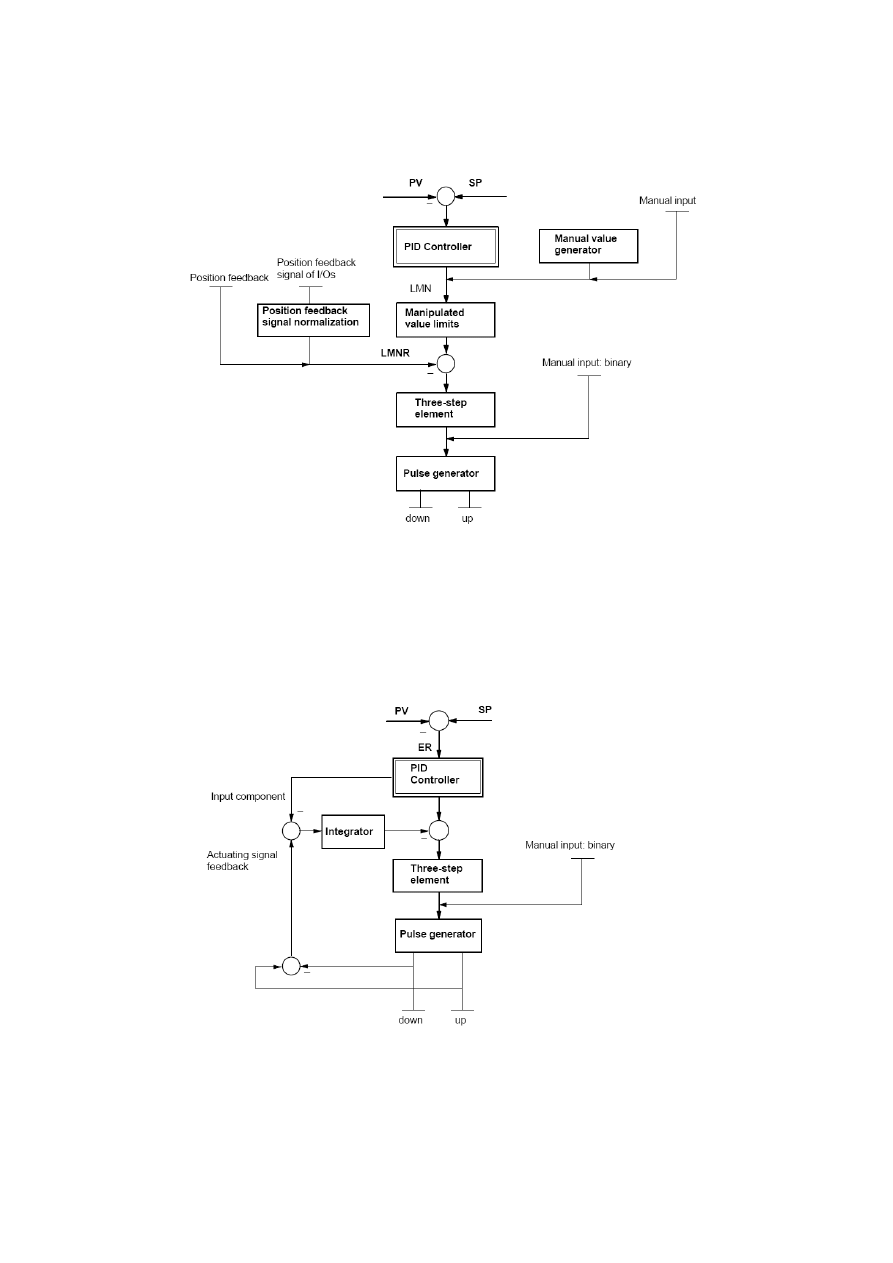
Bloki funkcyjne
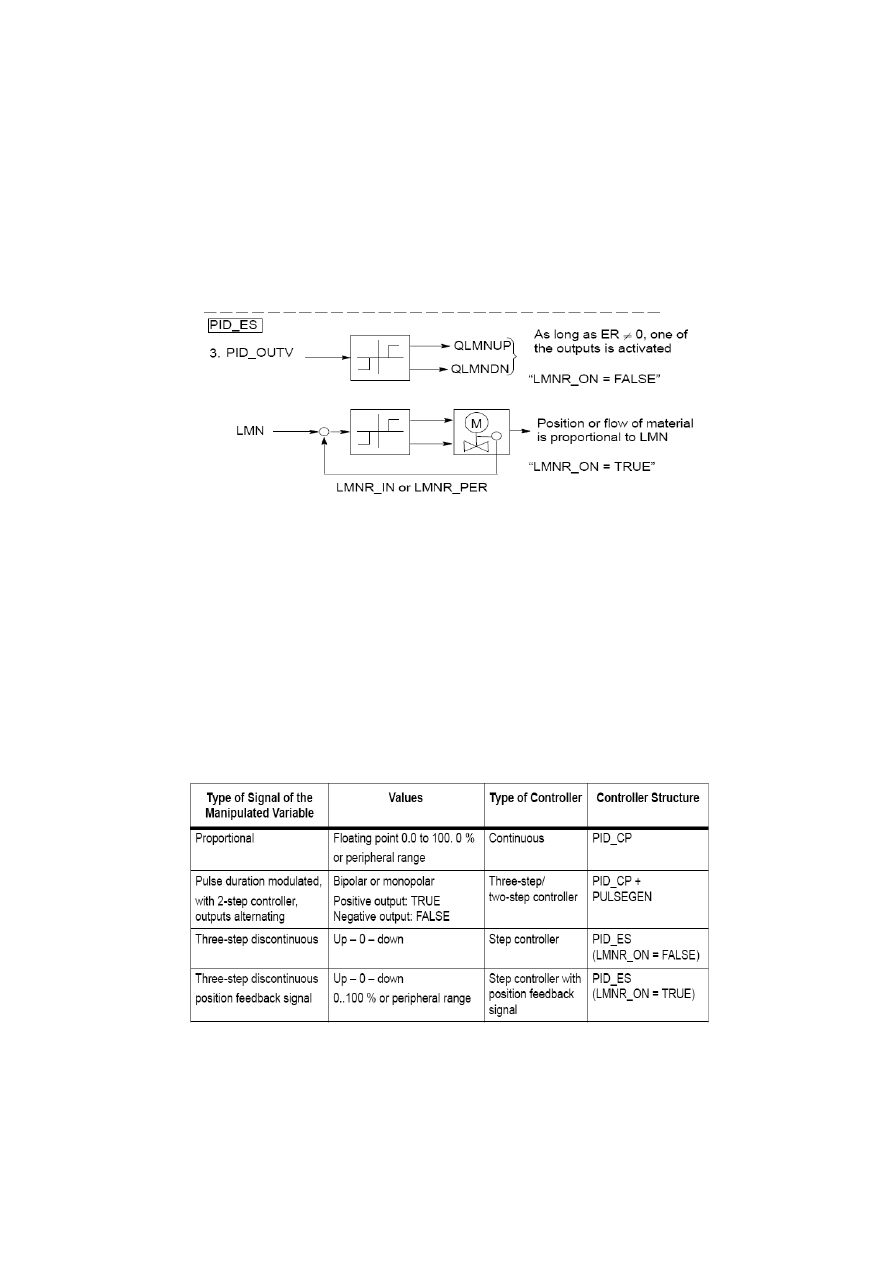
• PID_ES – regulator z wyj
ś
ciem
trójstanowym
Dobór konfiguracji układu
wyj
ś
ciowego

dr in
ż
. Stefan Brock
27
Zastosowanie standardowego
bloku PID
• Regulacja stałowarto
ś
ciowa typu P, PI, PD, PID
• Regulacja stałowarto
ś
ciowa z sygnałem
wyprzedzaj
ą
cym
• Regulacja kaskadowa
• Regulacja z zachowaniem stosunku zmiennych
• Regulacja procesów mieszania
Funkcje standardowego bloku PID
• Ograniczanie warto
ś
ci sygnałów i szybko
ś
ci zmian sygnałów:
zadanego i wyj
ś
ciowego
• Ograniczenie wpływu zakłóce
ń
przez filtrowanie sygnału
uchybu
• Dodatkowe opó
ź
nianie sygnału pomiarowego (człon inercyjny)
w celu ograniczenia oscylacji wysokiej cz
ę
stotliwo
ś
ci
• Linearyzacja kwadratowej funkcji sygnału pomiarowego
(pomiar przepływu poprzez ró
ż
nicowy czujnik ci
ś
nienia)
• Tryb pracy r
ę
czny - zadawanie warto
ś
ci wyj
ś
ciowej z innych
bloków
• Monitorowanie dwóch par warto
ś
ci : ostrzegawczej i alarmowej
dla sygnałów pomiarowego i uchybu
• Mo
ż
liwo
ść
zastosowania działania P i D w torze sprz
ęż
enia
zwrotnego
dr in
ż
. Stefan Brock
28
Kompensacja wpływu
mierzonych zakłóce
ń
Regulacja z zachowaniem stosunku
zmiennych Ratio Control
dr in
ż
. Stefan Brock
29
Regulacja
procesu
mieszania
Regulacja kaskadowa
dr in
ż
. Stefan Brock
30
Regulator z
wyj
ś
ciem
ci
ą
głym lub
impulsowym
dr in
ż
. Stefan Brock
31
Regulator z
wyj
ś
ciem
3-stanowym i
sprz
ęż
eniem od
układu
wykonawczego
Regulator z
wyj
ś
ciem
3-stanowym,
bez sprz
ęż
enia
od układu
wykonawczego
dr in
ż
. Stefan Brock
32
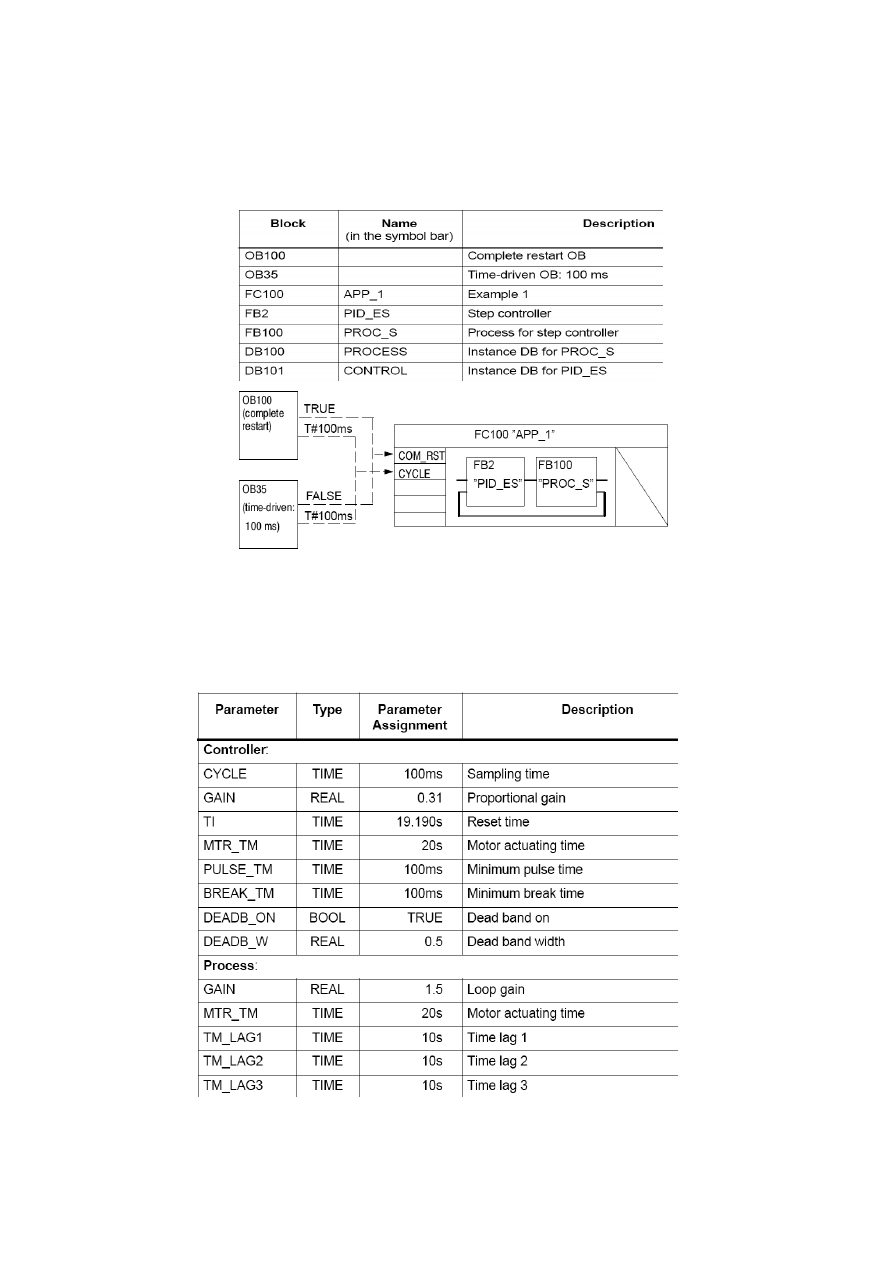
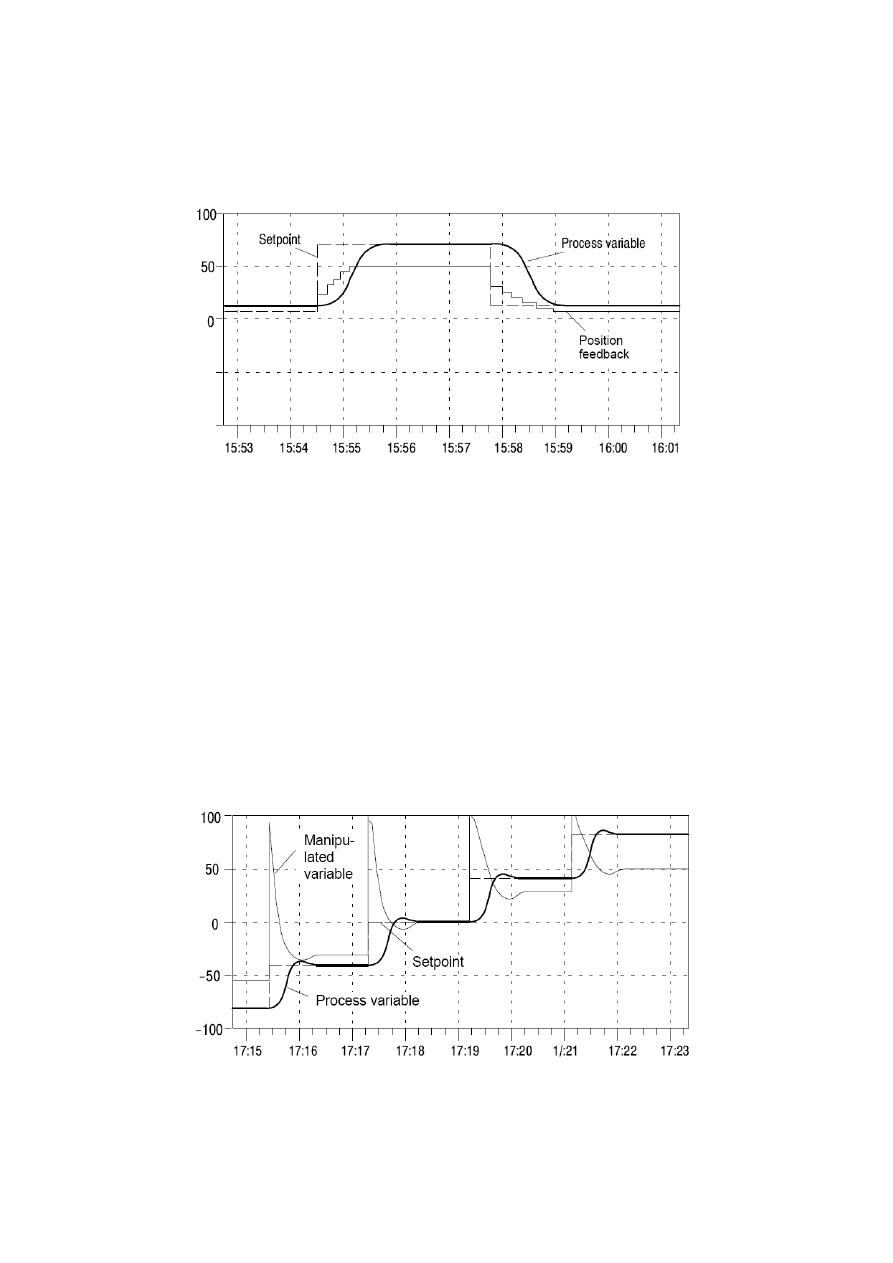
Przykład 1 - obiekt symulowany, typ PI,
wyj
ś
cie 3-stanowe
dr in
ż
. Stefan Brock
33
Bloki programu
dr in
ż
. Stefan Brock
34
Przykład 2 - obiekt symulowany, typ
PID, wyj
ś
cie ci
ą
głe
dr in
ż
. Stefan Brock
35
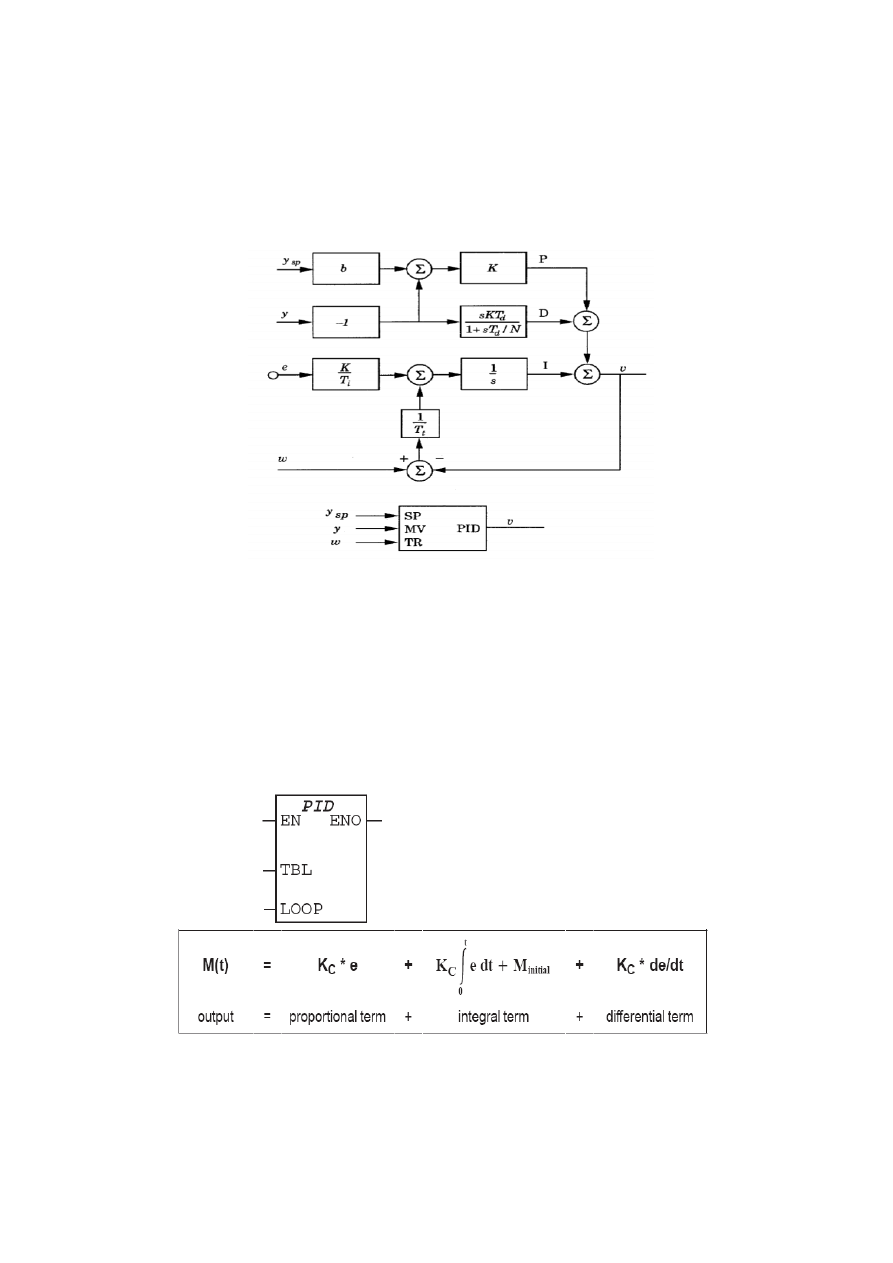
Przemysłowe regulatory PID
Regulator PID w S7-200
TBL – adres zmiennej tworzącej
tablicę z danymi
LOOP – numer pętli – 0..7
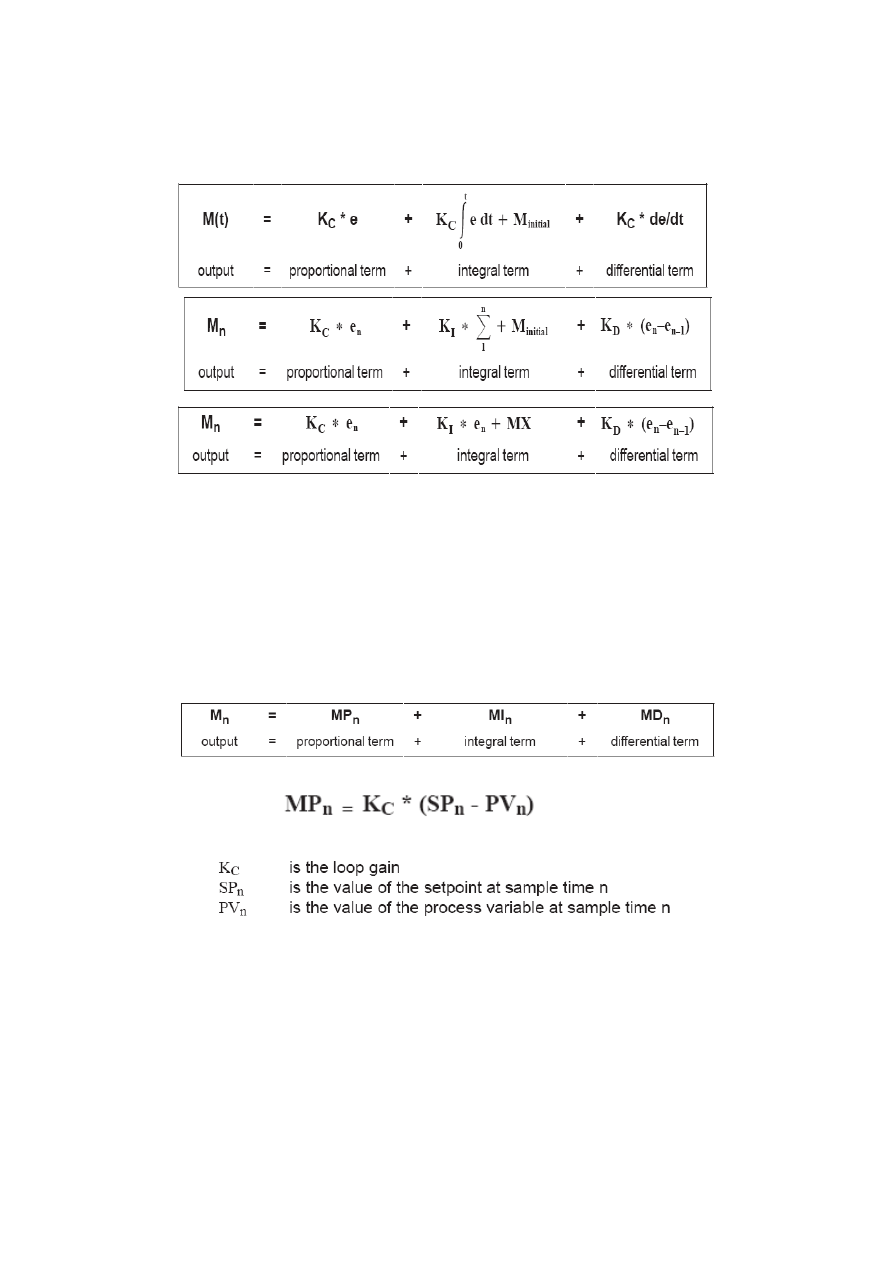
dr in
ż
. Stefan Brock
36
MX – wartość z poprzedniej próbki
dr in
ż
. Stefan Brock
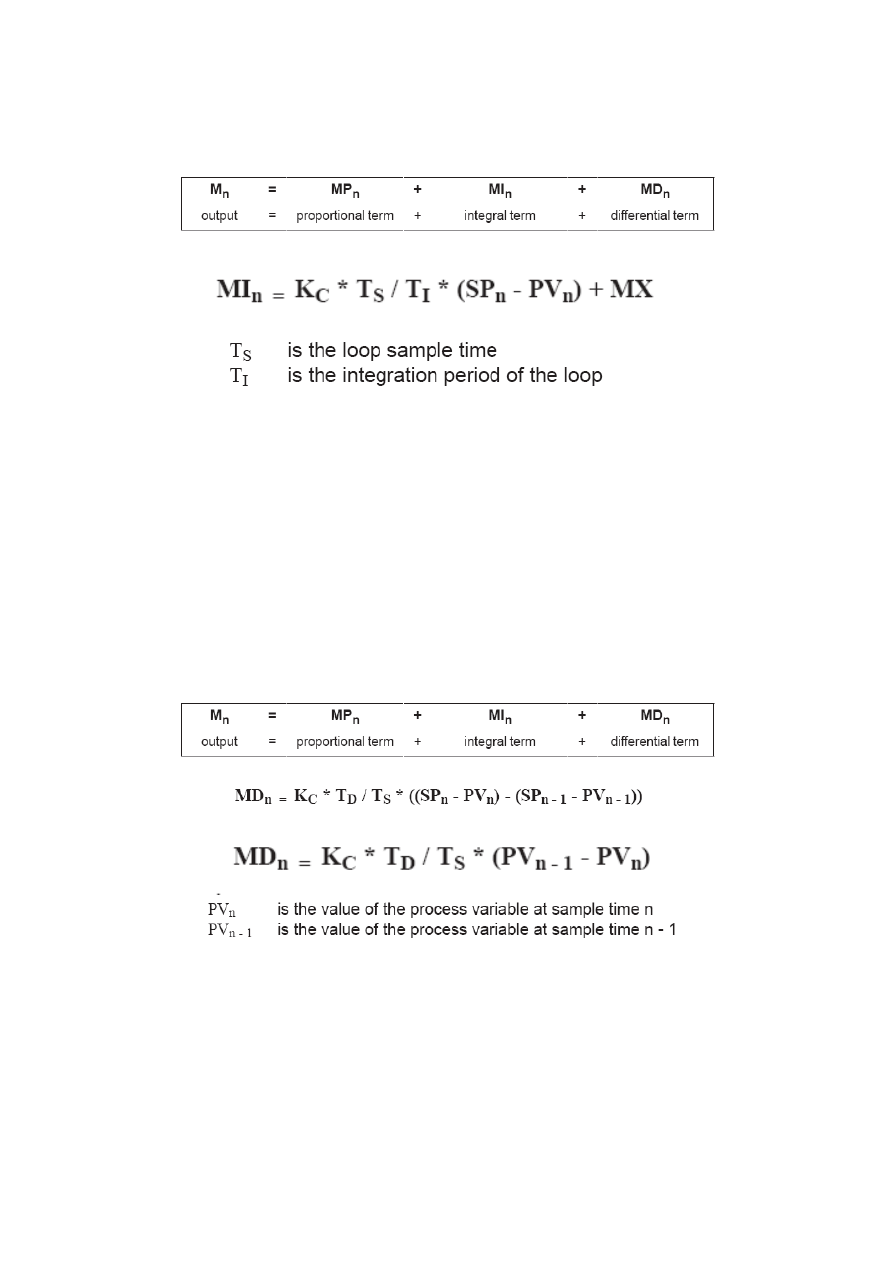
37
Wyłączenie poprzez wpis Ti=<bardzo dużo>
UWAGA: Aby umozliwić praće typu I lub ID wpis Kc=0.0
jest interpretowany jako wyłączenie części P, lecz przyjęcie
Kc=1.0 dla części I oraz D
dr in
ż
. Stefan Brock
38
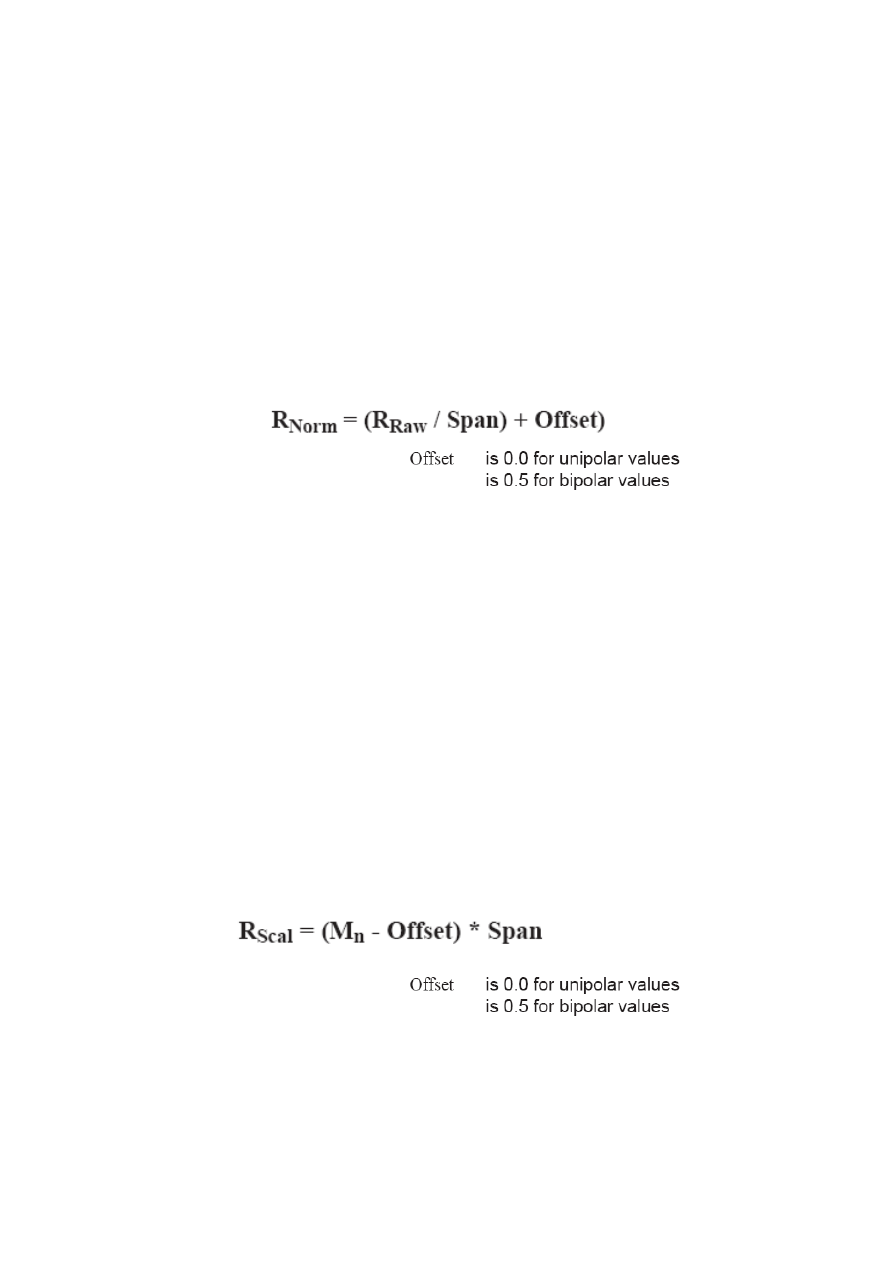
Normalizacja sygnałów wej
ś
ciowych
1. Konwersja liczby wejściowej (na przykład z
przetwornika A/C) do postaci
zmiennoprzecinkowej.
2. Normalizacja do zakresu 0.0 – 1.0
Normalizacja sygnału wyj
ś
ciowego
Wyjście jest znormalizowane 0.0 – 1.0
•
Denormalizacja do liczby rzeczywistej skalowanej
•
Konwersja do liczby całkowitej dla przetwornika
C/A
dr in
ż
. Stefan Brock
39
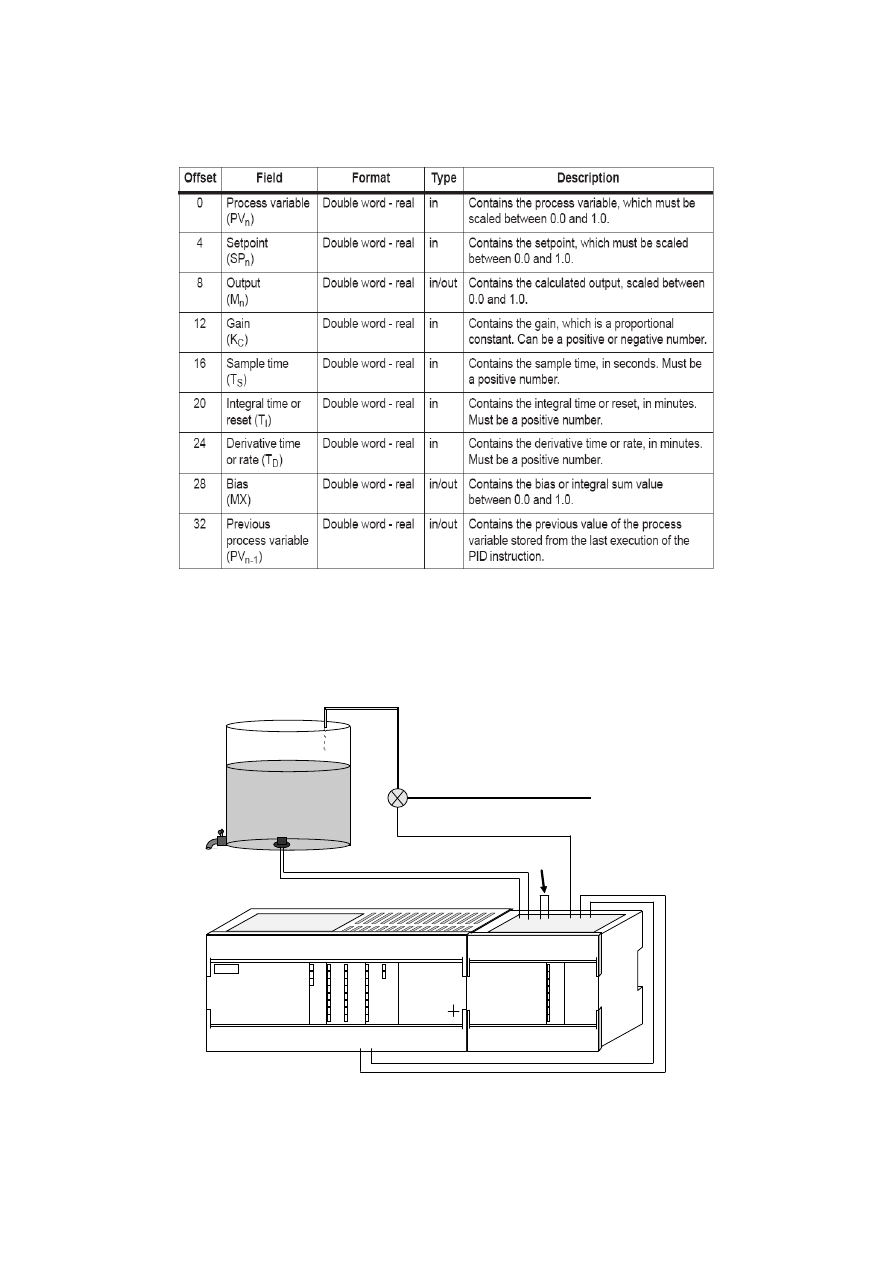
Analog Input (4-20mA) for PID PV
B+,B- and C+,C-
are unused inputs
Analog Output (0-10V) from PID process
pump with the
water supply
water level 75 %
I 0.7
I 0.2
I 0.6
I 0.5
I 0.4
I 0.3
I 0.1
I 0.0
I 1.2
I 1.5
I 1.4
I 1.3
I 1.1
I 1.0
Q 0.7
Q 0.2
Q 0.6
Q 0.5
Q 0.4
Q 0.3
Q 0.1
Q 0.0
Q 1.1
Q 1.0
STOP
RUN
SF
SIEMENS
6ES7 214-1BC01-0XB0
CPU 216
SIMATIC
S7-200
X
4
1
3
EXTF
EM 235
AI 3x12Bit
AQ 1x12Bit
A+ A-
B+ B-
Vo L+ M
M
L+
dr in
ż
. Stefan Brock
40
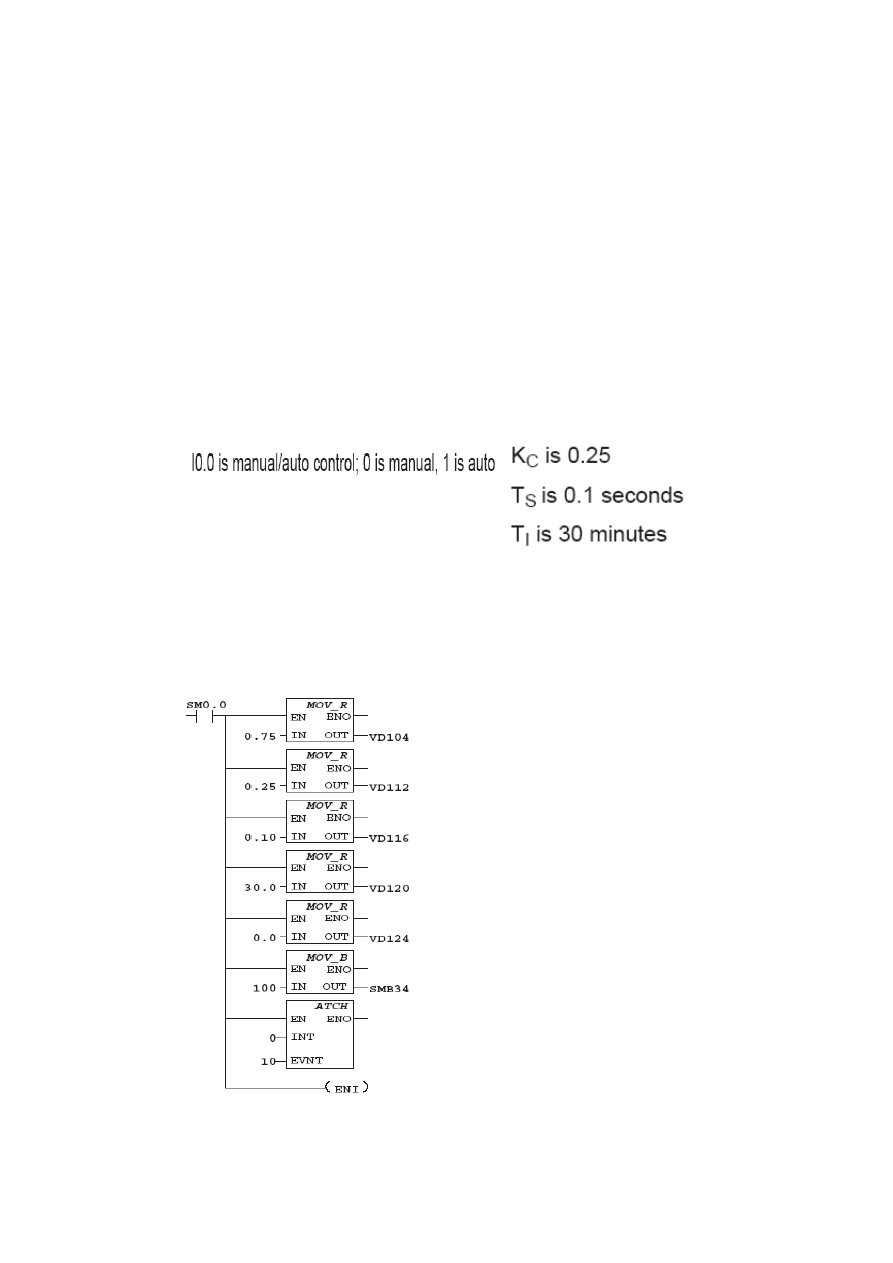
Przykład PID
• Utrzymywanie stałego poziomu wody w
zbiorniku - stała warto
ść
zadana – 75%
• Odbiór – o zmiennej, nie mierzonej szybko
ś
ci
• Zasilanie – pompa o nastawianej wydajno
ś
ci
• Pomiar poziomu – sygnał analogowy,
unipolarny
• Sygnał wyj
ś
ciowy- sygnał analogowy,
unipolarny
VD104 – wartość zadana
VD112 – Kc=0.25
VD116 – Ts=0.1 s
VD120 – Ti=30 min
VD124 – Td=0
SMB34 – przerwanie czasowe,
100 ms
Zgoda na przerwania
dr in
ż
. Stefan Brock
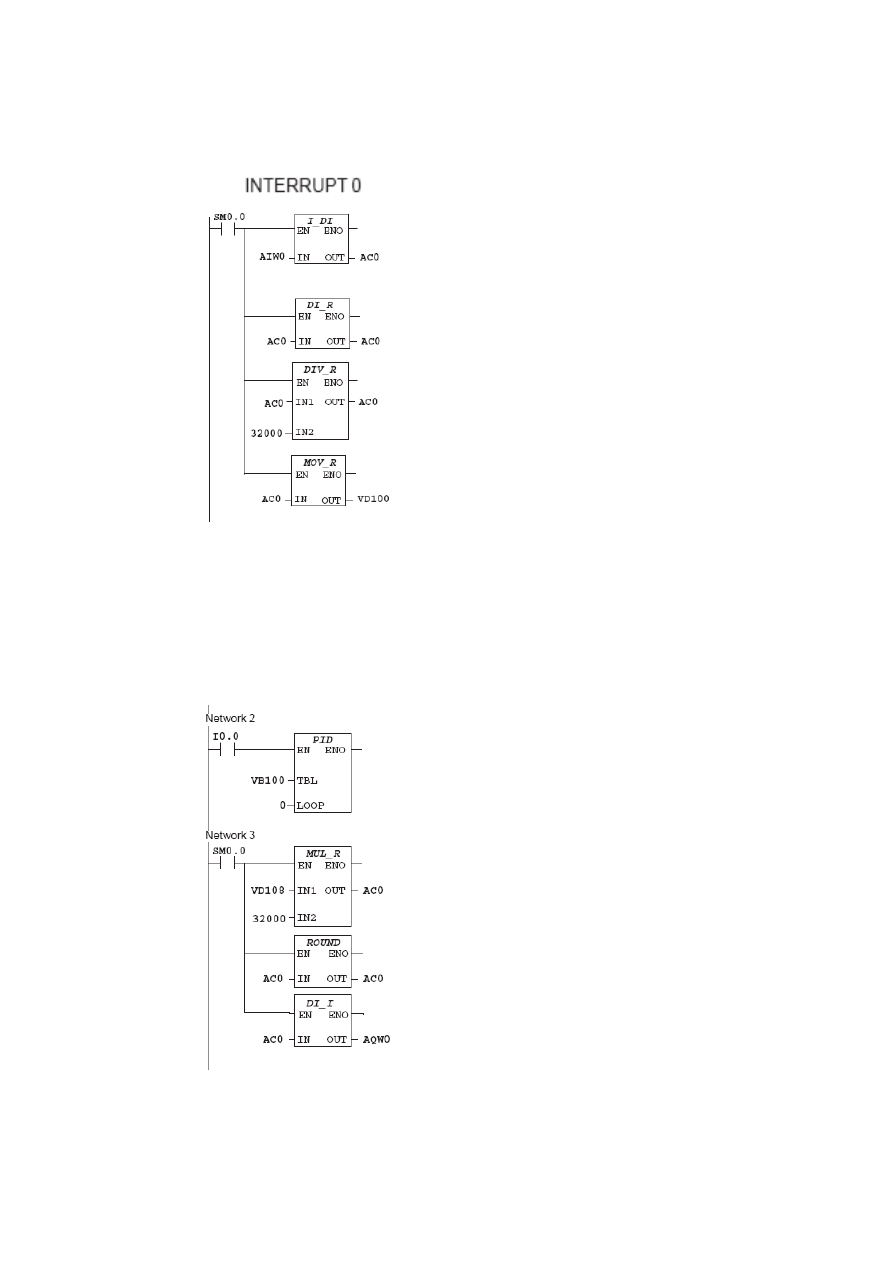
41
Odczyt A/C (kanał 0) do akumulatora
Konwersja do liczby rzeczywistej
Normalizacja do zakresu 0.0 – 1.0
Wpis do tabeli regulatora PID
Warunkowe wywołanie bloku
regulatora PID
Denormalizacja sygnału
wyjściowego
Konwersja do liczby całkowitej
Wyprowadzenie sygnału
wyjściowego na przetwornik C/A
Wyszukiwarka
Podobne podstrony:
PLC mgr wyklad 2011 algorytmy
PLC mgr wyklad 2011 nastawy
Prawo finansowe wszystkie wykłady, STUDIA UE Katowice, semestr I mgr, PRAWO FINANSOWE, wykłady 2011
PLC wyklad simatic PID
perswazja wykład2 2011 Zasady skutecznej perswazji Petty & Cacioppo
BD Wykład 3 2011
Zadanie z pasowania otwarte, PWR Politechnika Wrocławska, podstawy metrologii, Wykłady 2011
IX 1 dr M K Grzegorzewska konspekt wykładu 2011
BD Wykład 4 2011
OS I mgr wykład 4 (2)
Wykład 2011-12-20, psychologia drugi rok, psychologia ról
Dynamika Budowli wyklad 4 2011 12
BD Wykład 8 2011
2 Architektura sterowników PLC materiały wykładowe
Wykłady 2011-2012, TiR UAM II ROK, Organizacja i zarządzanie przedsiębiorstwem turystycznym
Struktura źródeł błędów w procesie pomiarowym, PWR Politechnika Wrocławska, podstawy metrologii, Wyk
Zaoczni wykład 2011, Kulturoznawstwo UAM, Ochrona właśności intelektualnej
więcej podobnych podstron