
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
0
MINISTERSTWO EDUKACJI
i NAUKI
Anna Kembłowska
Krzysztof Kembłowski
Montaż i badanie energoelektronicznych układów
napędowych 311[08].Z4.03
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2005

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
mgr inż. Jan Krzemiński
mgr Joachim Strzałka
Opracowanie redakcyjne:
mgr inż. Katarzyna Maćkowska
Konsultacja:
dr Bożena Zając
Korekta:
mgr inż. Jarosław Sitek
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 311[08]Z4.03
„Montaż i badanie energoelektronicznych układów napędowych” zawartego w modułowym
programie nauczania dla zawodu technik elektryk.
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2005

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1. Wprowadzenie
3
2. Wymagania wstępne
4
3. Cele kształcenia
5
4. Materiał nauczania
6
4.1. Wiadomości wstępne
6
4.1.1. Materiał nauczania
4.1.2. Pytania sprawdzające
4.1.3. Ćwiczenia
4.1.4. Sprawdzian postępów
6
11
11
14
4.2. Układy napędowe z silnikami prądu stałego
14
4.2.1. Materiał nauczania
4.2.2. Pytania sprawdzające
4.2.3. Ćwiczenia
4.2.4. Sprawdzian postępów
14
21
21
28
4.3. Układy napędowe z silnikami prądu przemiennego
28
4.3.1. Materiał nauczania
4.3.2. Pytania sprawdzające
4.3.3. Ćwiczenia
4.3.4. Sprawdzian postępów
28
38
39
43
5. Sprawdzian osiągnięć
44
6. Literatura
47

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
1. WPROWADZENIE
Poradnik będzie Ci pomocny w przyswajaniu wiedzy i kształtowaniu umiejętności
z zakresu montażu i badania energoelektronicznych układów napędowych.
W poradniku zamieszczono:
− wymagania wstępne,
− cele kształcenia,
− materiał nauczania,
− pytania sprawdzające
− ćwiczenia wraz z instrukcjami,
− sprawdziany postępów
− sprawdzian osiągnięć.
Materiał nauczania zawiera informacje niezbędne do realizacji zaplanowanych ćwiczeń.
Zawiera on podstawowe pojęcia, prawa, symbole, definicje, schematy, opisy i rysunki.
Zapoznaj się z nim bardzo uważnie – umożliwi Ci to zrozumienie zagadnienia i wykonanie
zadań.
Pytania sprawdzające pozwolą Ci sprawdzić, czy jesteś dobrze przygotowany do
wykonywania zadań.
Ćwiczenia zawierają polecenia, sposób wykonania oraz wyposażenie stanowiska pracy.
Przeczytaj uważnie polecenia, jeśli masz jakieś wątpliwości zapytaj nauczyciela. Zwróć
szczególną uwagę na właściwy dobór sprzętu pomiarowego, zasady badania urządzeń
energoelektronicznych układów napędowych, sposób opracowywania wyników badań,
zasady montażu i przestrzeganie zasad bezpieczeństwa przy wykonywaniu ćwiczeń. Pamiętaj
o przestrzeganiu zasad bezpieczeństwa
Zwróć uwagę na instrukcje do badania układów zawierających symulacje elektroniczne.
Ćwiczenia te wymagają nie tylko znajomości danego zagadnienia, ale również biegłości przy
pracy z komputerem.
Po wykonaniu ćwiczeń, sprawdź poziom swoich postępów.
W tym celu:
− przeczytaj pytania i odpowiedz na nie
− wpisz TAK jeśli Twoja odpowiedź była prawidłowa
− wpisz NIE jeśli Twoja odpowiedź na pytanie jest błędna
Odpowiedzi NIE wskazują na luki w Twojej wiedzy, informują Cię również jakich zagadnień
jeszcze nie poznałeś. Oznacza to, że do tych treści powinieneś wrócić.
Stopień przyswojenia przez Ciebie wiadomości i ukształtowanie umiejętności będzie oceniał
nauczyciel. W tym celu może posłużyć się zadaniami testowymi. W niniejszym poradniku
znajdziesz przykład takiego testu, zawiera on:
− instrukcję, w której omówiono tok postępowania podczas przeprowadzania sprawdzianu
− zestaw przykładowych zadań
− przykładową kartę odpowiedzi
Bezpieczeństwo i higiena pracy
W czasie pobytu w pracowni musisz przestrzegać regulaminów, przepisów bhp oraz
instrukcji przeciwpożarowych. Przepisy te poznasz podczas trwania nauki.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu jednostki modułowej powinieneś umieć:
− klasyfikować urządzenia energoelektroniczne,
– rozróżniać i charakteryzować poszczególne rodzaje urządzeń energoelektronicznych,
– klasyfikować półprzewodnikowe przyrządy mocy (ppm),
– interpretować podstawowe parametry i charakterystyki prądowo-napięciowe ppm,
– dobierać z katalogów ppm do warunków pracy,
– rozpoznawać elementy i podzespoły urządzeń energoelektronicznych,
– analizować pracę wybranych urządzeń energoelektronicznych na schematach oraz na
podstawie przebiegów czasowych prądów i napięć,
– charakteryzować zabezpieczenia urządzeń energoelektronicznych,
– charakteryzować rozwiązania konstrukcyjne urządzeń energoelektronicznych,
– dobierać filtry zabezpieczające przekształtniki przed zakłóceniami,
– organizować stanowisko pracy do montażu i badania urządzeń energoelektronicznych
w układach napędowych zgodnie z przepisami bhp, ochrony ppoż., ochrony środowiska
i wymaganiami ergonomii,
– dobierać przyrządy pomiarowe i metody pomiaru do badania urządzeń
energoelektronicznych,
– montować i uruchamiać podzespoły obwodu głównego w urządzeniu
energoelektronicznym,
– wyznaczać charakterystyki eksploatacyjne typowych przekształtników,
– interpretować przebiegi czasowe napięć i prądów w układach energoelektronicznych,
– lokalizować i usuwać proste uszkodzenia w urządzeniach energoelektronicznych,
– stosować zasady eksploatacji urządzeń energoelektronicznych,
– stosować zasady bhp podczas pracy przy urządzeniach elektrycznych,
– klasyfikować maszyny elektryczne,
– interpretować podstawowe parametry i charakterystyki silników elektrycznych,
– analizować pracę silników elektrycznych na podstawie ich charakterystyk,
– wyznaczać charakterystyki silników,
– posługiwać się dokumentacją techniczną, normami oraz katalogami maszyn
elektrycznych, podzespołów i urządzeń energoelektronicznych
– stosować zasady eksploatacji maszyn elektrycznych.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
3. CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
− wyjaśnić strukturę energoelektronicznego układu napędowego na schemacie blokowym,
– sklasyfikować energoelektroniczne układy napędowe,
– scharakteryzować właściwości układów napędowych,
– scharakteryzować kryteria regulacji układów napędowych,
– odczytać schematy funkcjonalne prostych energoelektronicznych układów napędowych,
– dobrać przyrządy pomiarowe i metody pomiaru podczas badania układów napędowych
zasilanych z przekształtników,
– zorganizować stanowisko pracy do montażu i badania energoelektronicznych układów
napędowych zgodnie z przepisami bhp, ochrony ppoż., ochrony środowiska
i wymaganiami ergonomii,
– połączyć i uruchomić układy napędowe zasilane z przekształtników,
– dokonać regulacji napięcia, prądu i prędkości obrotowej w układach napędowych,
– wyznaczyć charakterystyki mechaniczne silników zasilanych z przekształtników,
– zmierzyć parametry wyjściowe układów napędowych,
– zanalizować oscylogramy wybranych przebiegów prądu i napięć w warunkach
normalnych i przy symulacji zakłóceń,
– ocenić wyniki badań właściwości statycznych i dynamicznych układu regulacyjnego,
– zlokalizować uszkodzenia układów energoelektronicznych na podstawie wykonanych
pomiarów,
– usunąć proste uszkodzenia w układzie napędowym,
– scharakteryzować najprostsze zabiegi konserwacyjne warunkujące prawidłową
eksploatację układów napędowych,
– zastosować zasady prawidłowej eksploatacji energoelektronicznych układów
napędowych,
– zastosować zasady bezpieczeństwa pracy oraz środki ochrony przeciwpożarowej
w energoelektronicznych układów napędowych,
– posłużyć się dokumentacją techniczno-ruchową urządzeń energoelektronicznych.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
4. MATERIAŁ NAUCZANIA
4.1. Wiadomości wstępne
4.1.1. Materiał nauczania
Napędem elektrycznym nazywamy zespół urządzeń i aparatów elektrycznych
pracujących na zasadzie wykorzystania energii elektrycznej i służących do nadawania ruchu
maszynie roboczej.
Klasyfikacja napędu elektrycznego ze względu na sposób rozprowadzania energii:
−
napęd transmisyjny,
−
napęd grupowy,
−
napęd jednostkowy,
−
napęd wielosilnikowy.
Klasyfikacja w zależności od zastosowanego silnika elektrycznego:
– napędy prądu stałego,
– napędy prądu przemiennego.
Klasyfikacja ze względu na zakres obsługi układu napędowego:
– napęd sterowany ręcznie,
– napęd półautomatyczny,
– napęd automatyczny.
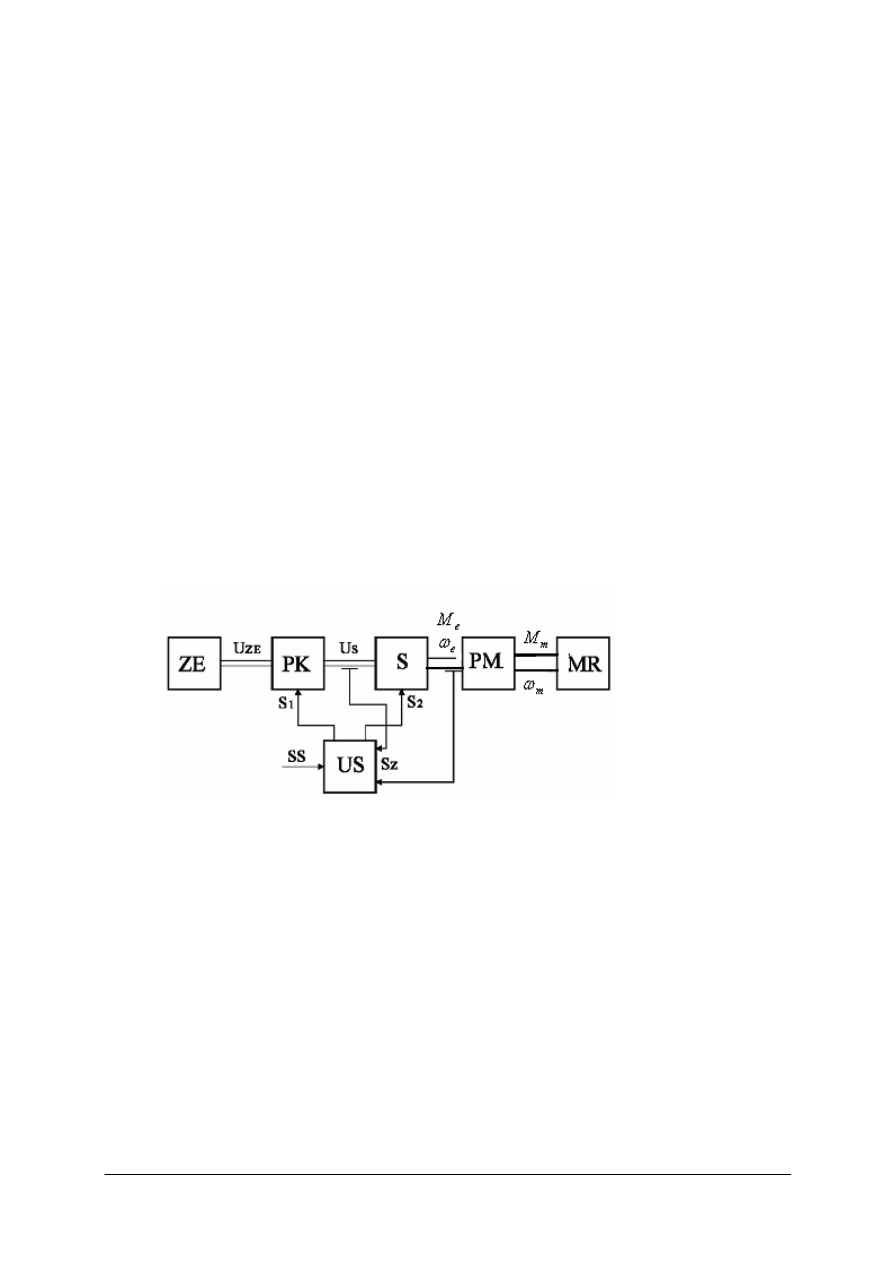
Rys. 1. Ogólna struktura układu napędowego [13]
ZE - źródło energii (elektrycznej),
PK - przekształtnik energii, S - silnik elektryczny, PM - przekładnia mechaniczna, MR - maszyna robocza, US -
układ sterujący, UZE- napięcie źródła energii, US - napięcie na zaciskach silnika, SS, S1, S2 - sygnały sterujące,
Sz - sygnały sprzężeń zwrotnych
Układ napędowy jest zasilany ze źródła, które jest charakteryzowane:
– wartością mocy,
– wartością napięcia,
– liczbą faz,
– wartością częstotliwości,
– wartością rezystancji lub impedancji wewnątrz źródła,
– kształtem napięcia.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
Podstawowe urządzenia wchodzące w skład układu napędowego:
1. Silniki elektryczne
2. Maszyna robocza
3. Części łączące silnik z maszyną roboczą
4. Przekształtnik oraz układ sterowania
Cechy silników elektrycznych z punktu widzenia zastosowania ich w układach
napędowych
Zalety:
– szeroki zakres mocy produkowanych silników (od pojedynczych watów w przypadku
silników do napędu modeli do stu megawatów w przypadku silników elektrowni
szczytowo-pompowych),
– powszechna dostępność energii elektrycznej i łatwość dostarczenia jej w dowolny punkt,
– ochrona środowiska,
– możliwość pracy w różnych warunkach otoczenia (na przykład w warunkach zagrożenia
wybuchem, pożarowego - niska temperatura jego elementów),
– łatwa możliwość kontroli i programowania pracy,
– łatwa regulacja prędkości (w szerokim zakresie i z dużą dokładnością),
– możliwość pracy we wszystkich czterech kwadrantach układu współrzędnych (praca
silnikowa, hamulcowa oraz prądnicowa),
– wysoka sprawność, niska cena i prosta obsługa w czasie eksploatacji.
– Do wad możemy zaliczyć:
– konieczność przyłączenia do nieruchomego zazwyczaj źródła energii elektrycznej
– ciężar jednostkowy i szybkość działania mniejsza niż w przypadku siłowników
pneumatycznych i hydraulicznych.
Charakterystyki mechaniczne silników elektrycznych
Z punktu widzenia napędu elektrycznego silniki klasyfikuje się pod względem
sztywności charakterystyki mechanicznej:
ω = f(M) lub M = f(ω ) ewentualnie M = f(n)
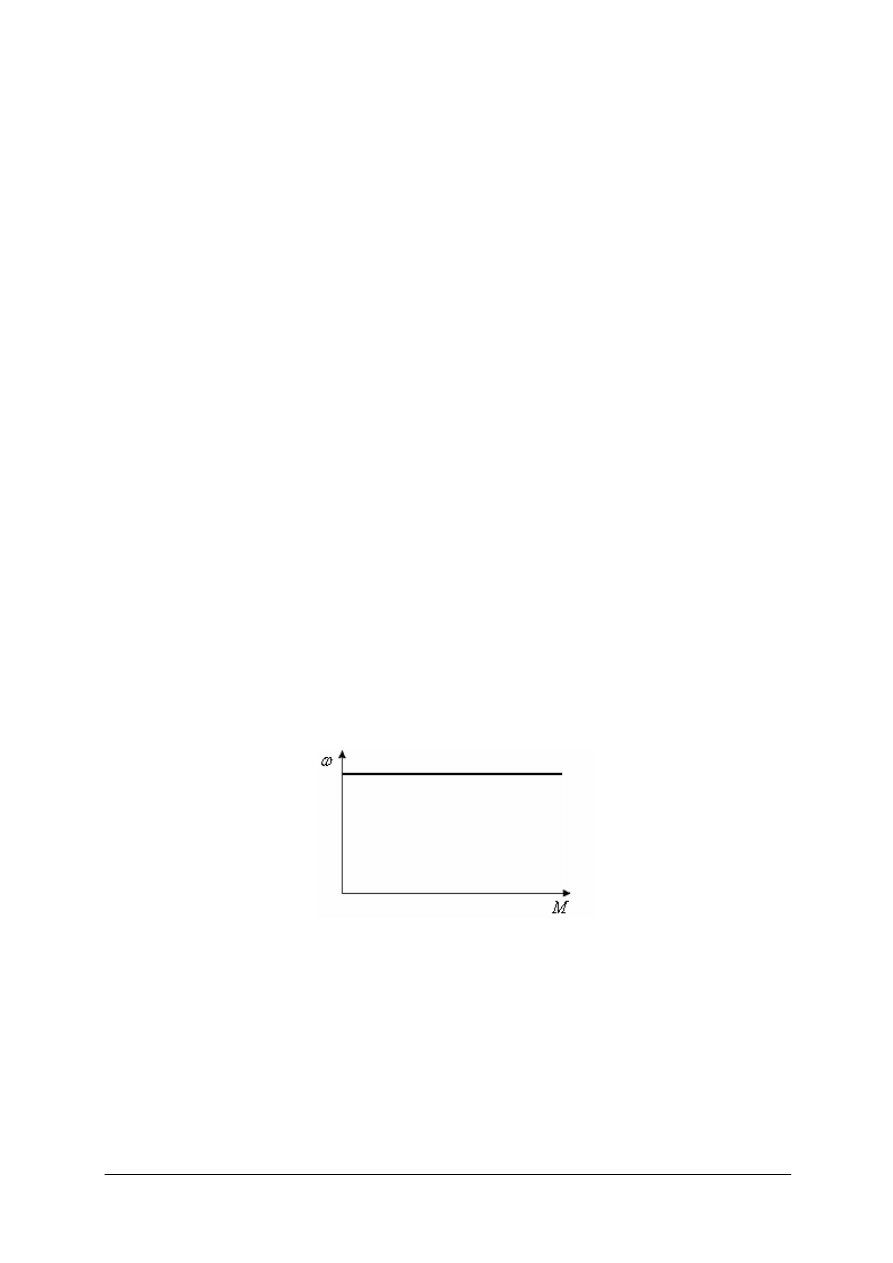
Rys. 2. Charakterystyka idealnie sztywna [10]
– silniki synchroniczne,
– silniki asynchroniczne synchronizowane.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
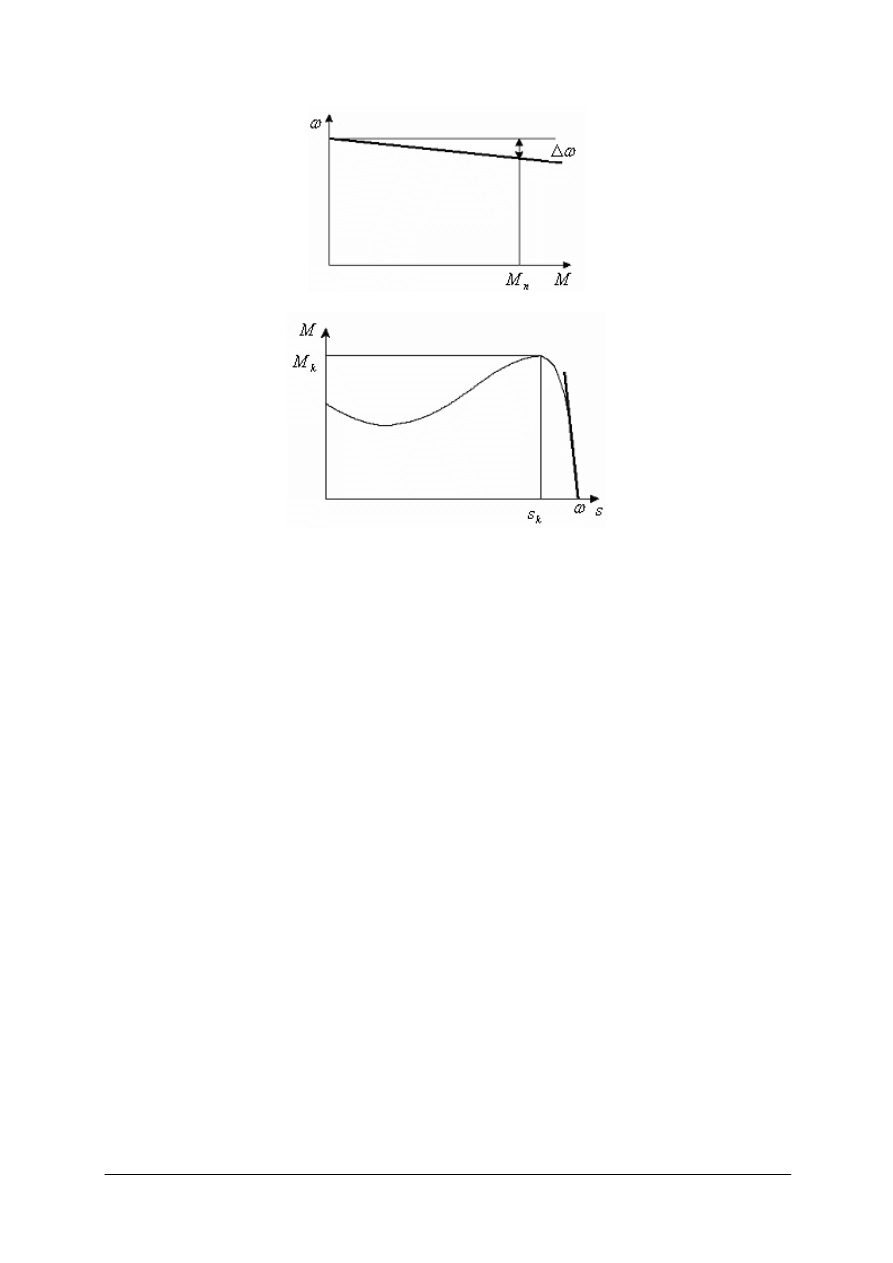
Rys. 3 Charakterystyka sztywna [10]
– silniki bocznikowe i obcowzbudne prądu stałego,
– silniki asynchroniczne (część charakterystyki).
Maszyna robocza – to ta, dla której cały ten układ został zbudowany. Przykładowo można tu
wymienić:
– wentylatory, sprężarki, pompy,
– prasy, wytłaczarki,
– dźwigi, suwnice,
– tokarki, strugarki, szlifierki,
– zgniatacze, nawijarki,
– narzędzia elektromechaniczne.
Przekładnia mechaniczna PM
Możliwe są następujące połączenia mechaniczne silnika z maszyną roboczą:
a) połączenie mechaniczne bez przekładni
– na sztywno,
– poprzez sprzęgło rozłączne,
b) połączenie z przekładnią
– zębatą,
– pasową,
– łańcuchową.
Przekładnie mogą być bezstopniowe lub stopniowe. Połączenie silnika z mechanizmem
może być:
– sztywne,
– poprzez element sprężysty,
– z luzem.
Rodzaje przekształtników stosowanych najczęściej w układach napędowych:
– prostownik niesterowany,
– prostownik sterowany jednokierunkowy,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
– przekształtnik sterowany nawrotny,
– bezpośredni przemiennik częstotliwości,
– przerywacz prądu stałego,
– sterownik prądu przemiennego,
– falownik napięcia.
Układ sterowania to:
– aparaty do sterowania i zabezpieczania układów napędowych,
– zadajniki,
– przetworniki pomiarowe,
– człony korekcyjne,
– regulatory.
WSZYSTKIE TE ELEMENTY POWINNY BYĆ TAK DOBRANE,
ABY NAPĘD
PRZEDSTAWIAŁ NAJKORZYSTNIEJSZE ROZWIĄZANIE
POD WZGLĘDEM TECHNICZNYM I EKONOMICZNYM
Parametry i charakterystyki opisujące układ napędowy:
1. Statyczne:
– moc mechaniczna silnika
S
S
M
P
ω
=
, gdzie
S
M – moment na wale silnika,
S
ω
– prędkość kątowa silnika,
– moc pobierana przez maszynę roboczą
O
O
M
P
ω
=
, gdzie
O
M – moment oporowy
maszyny roboczej,
O
ω
– prędkość kątowa maszyny roboczej,
– moment bezwładności J,
– charakterystyka mechaniczna silnika
)
(
S
S
M
f
=
ω
,
– charakterystyka mechaniczna napędzanego urządzenia )
(
O
O
f
M
ω
=
.
2. Dynamiczne
– moment dynamiczny
t
J
M
d
Δ
Δ
=
ω
,
– czas trwania stanów nieustalonych.
Dokumentacja układu napędowego
Każdy obiekt lub urządzenie elektryczne, w tym również układ napędowy, są
wykonywane według odpowiednio przygotowanej dokumentacji technicznej. Spełnia ona
ważną funkcję w procesie budowy, instalowania i eksploatacji układu napędowego.
Dokumentacja techniczna obejmuje:
1. Założenia techniczno-ekonomiczne.
2. Projekt
techniczny.
Producenci układów napędowych razem z urządzeniem wydają dokumentację na wyroby
i określają warunki eksploatacji. Najczęściej warunki te podawane są w mniej lub bardziej
szczegółowej dokumentacji techniczno-ruchowej (DTR). Zawiera ona wówczas elementy

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
projektu technicznego, poszerzone o wymagania dotyczące uruchomienia, poprawnej pracy,
warunków eksploatacji i wykaz elementów napędu nie będących wyrobem bezpośrednim
producenta napędu.
Ogólne wytyczne sporządzania dokumentacji:
1. Schematy elektryczne układu napędowego wchodzące w skład dokumentacji wykonuje się
najczęściej na arkuszach o formacie A4 lub wielokrotności A4, które są opisane
(ponumerowane i podzielone na kolumny).
2. W każdej kolumnie jest opisana funkcja danej części układu.
3. Poszczególne elementy wyposażenia elektrycznego mogą się znajdować na różnych
arkuszach ze względu na spełniane funkcje.
4. Normy krajowe i międzynarodowe podają kody literowe podzespołów, aparatów,
elementów itp., które stosuje się przy opracowywaniu poszczególnych schematów
dokumentacji (tablica 1).
5. Jeżeli w danym układzie jest więcej elementów o takiej samej literze, to odróżnia się je
cyfrą, która występuje po literze, np. K7 oznacza, że jest to stycznik lub przekaźnik
o kolejnym numerze 7.
6. Bardziej złożone schematy elektryczne poprzedza legenda uwzględniająca oznaczenia nie
objęte normami.
Projektowanie energoelektronicznego układu napędowego
Projekt układu przygotowuje się dla dwóch różnych odbiorców:
– dla producenta,
– dla klienta.
Producent z dokumentacji projektowej musi się dowiedzieć:
– jakie materiały i podzespoły trzeba zakupić – czyli musi znać katalogową (według
katalogu dostawcy) nazwę i ilość materiału, elementów lub podzespołów,
– co trzeba zrobić – czyli otrzymać rysunki i inne dokumenty informujące robotników, co
ma być wykonane, materiał, wymiary i tolerancje obrabianych detali, nazwy elementów
i sposób ich montażu,
– jak sprawdzić, czy produkt wykonano prawidłowo, co i jak mierzyć, jakie przepisy
i normy stosować przy próbach technicznych, (WTO – warunki techniczne odbioru),
– jakie będą koszty materiałów, robocizny i sprzętu przy produkcji
Dla klienta większość powyższych informacji jest nieinteresująca, natomiast zwykle chce
on znać:
– parametry znamionowe urządzenia, w tym jakie jest znamionowe zasilanie i znamionowe
obciążenie,
– gabaryty i masę,
– jakie przepisy i normy spełnia wyrób),
– niezawodność (na przykład średni czas międzyawaryjny), gwarancje, serwis, cenę.
Przy projektowaniu przekształtnika jako wartości do dalszych obliczeń powinniśmy mieć
dane:
l. Prąd, napięcie i moc znamionową przekształtnika
2. Prąd graniczny przekształtnika
3. Przeciążalność przekształtnika
4. Gabaryty i masa przekształtnika
5. Sprawność przekształtnika
Posiadając powyższe dane można przystąpić do projektowania przekształtnika czyli
określenia:
1. Doboru prądowego tyrystora z radiatorem na warunki znamionowe
2. Prądu granicznego tyrystora

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
3. Przeciążalności tyrystora (warunki dynamiczne)
4. Transformatora
5. Bezpiecznika topikowego
6. Klasy
napięciowa tyrystora
7. Tłumika przepięć.
Projekt układu powinien być tak sporządzony, aby był czytelny nie tylko dla projektanta,
ale również (a może przede wszystkim dla osób, do których jest adresowany). Dlatego też
projekt taki powinien zawierać następujące elementy:
1. Strona tytułowa: temat, autor, data sporządzenia
2. Spis treści
3. Dokumenty związane z projektem – normy i przepisy krajowe i międzynarodowe
4. Założenia – dane liczbowe i schemat
5. Zestawienie podstawowych danych (np. elektryczne wartości znamionowe, gabaryty,
masa)
6. Obliczenia projektowe, w których zwykle dobrze czytelny jest szablon:
DANE
OBLICZENIA
WYNIK
7. Pełny schemat ideowy
8. Wykaz materiałów
9. Szkic konstrukcji mechanicznej ( rozmieszczenie elementów )
10. Rysunki powinny być nazwane
11. Należy unikać przepisywania całych katalogów, ale przepisywać te dane, które są
niezbędne do przeprowadzenia i weryfikacji obliczeń.
12. Literatura – poradniki, katalogi itp. umieszczać na końcu projektu.
13. W projekcie zamieszczać dane w postaci zwartej, na przykład tablic.
4.1.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Co to jest układ napędowy?
2. Z jakich części składa się układ napędowy?
3. Jakie są podstawowe zalety energoelektrycznego układu napędowego?
4. Jakie wielkości opisują układ napędowy w ruchu obrotowym i prostoliniowym?
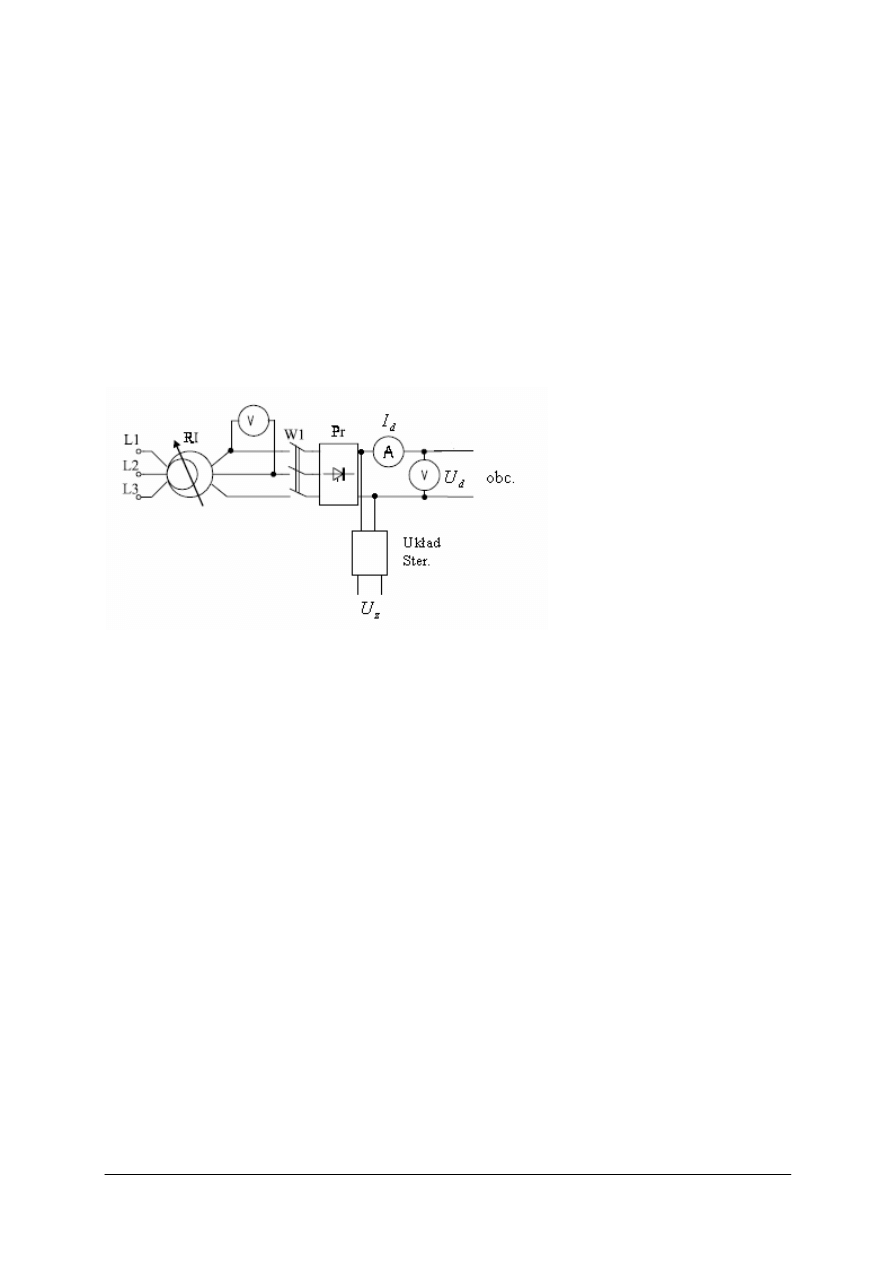
4.1.3. Ćwiczenia
Ćwiczenie 1
Na schemacie układu napędowego rozpoznaj zastosowane podzespoły i określ ich
przeznaczenie.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) określić rodzaj podzespołów zastosowanych w podanym schemacie układu napędowego,
2) określić funkcję poszczególnych podzespołów.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
Wyposażenie stanowiska pracy:
– zestaw przykładowych schematów energoelektronicznych układów napędowych,
– kartki papieru,
– karty katalogowe,
– długopis,
– ołówek.
Schemat przykładowego układu napędowego
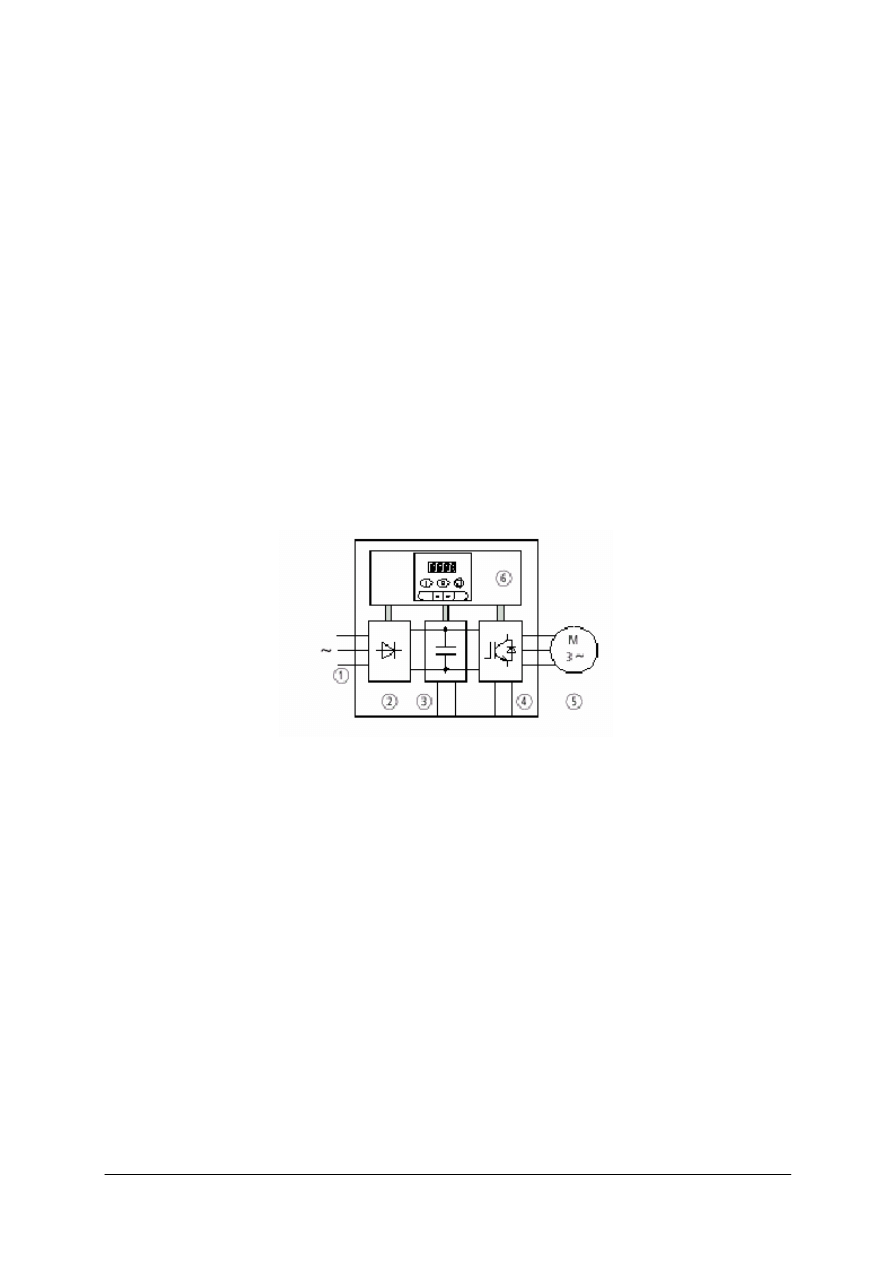
Ćwiczenie 2
Rozpoznaj elementy układu w rzeczywistym przekształtniku.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) rozpoznać w danym rzeczywistym układzie przekształtnika elementy sterowania,
2) uzupełnić tabelkę nazwami rozpoznanych elementów.
Numer
elementu
Nazwa elementu
Przeznaczenie
1
2
3
4
Wyposażenie stanowiska pracy:
– rzeczywisty układ napędowy z przekształtnikiem,
– dokumentacja układu napędowego z przekształtnikiem
– kartki,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
– długopis,
– karty katalogowe.
Ćwiczenie 3
Dobierz rodzaj przekształtnika do zasilania określonego silnika elektrycznego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) określić parametry silnika niezbędne do dobrania rodzaju przekształtnika,
2) określić warunki pracy układu napędowego,
3) obliczyć potrzebne parametry do doboru przekształtnika,
4) wyszukać w katalogach przekształtnik spełniający wymagania,
5) zweryfikować i uzasadnić sposób doboru przekształtnika.
Wyposażenie stanowiska pracy:
– karty katalogowe silników,
– karty katalogowe przekształtników,
– kalkulator,
– kartka,
– długopis.
Ćwiczenie 4
Przeanalizuj zachowanie układu napędowego w stanie dynamicznym na podstawie
przebiegów prędkości obrotowej i prądu – symulacja komputerowa.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zapoznać się z programem komputerowym do symulacji układów elektronicznych
i energoelektronicznych,
2) zaprojektować polecony przez nauczyciela układ energoelektroniczny,
3) zbadać jego dynamikę poprzez obserwację przebiegów czasowych w programie
symulacyjnym,
4) wydrukować przebiegi czasowe napięcia, prądu i prędkości obrotowej układu
napędowego z zastosowaniem w/w przekształtnika,
5) wyciągnąć wnioski z przeprowadzonych badań.
Wyposażenie stanowiska pracy:
– stanowisko komputerowe z oprogramowaniem specjalistycznym,
– drukarka,
– instrukcja obsługi programu specjalistycznego,
– karty katalogowe elementów elektronicznych,
– karty katalogowe silników elektrycznych,
– długopis,
– kartki papieru.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
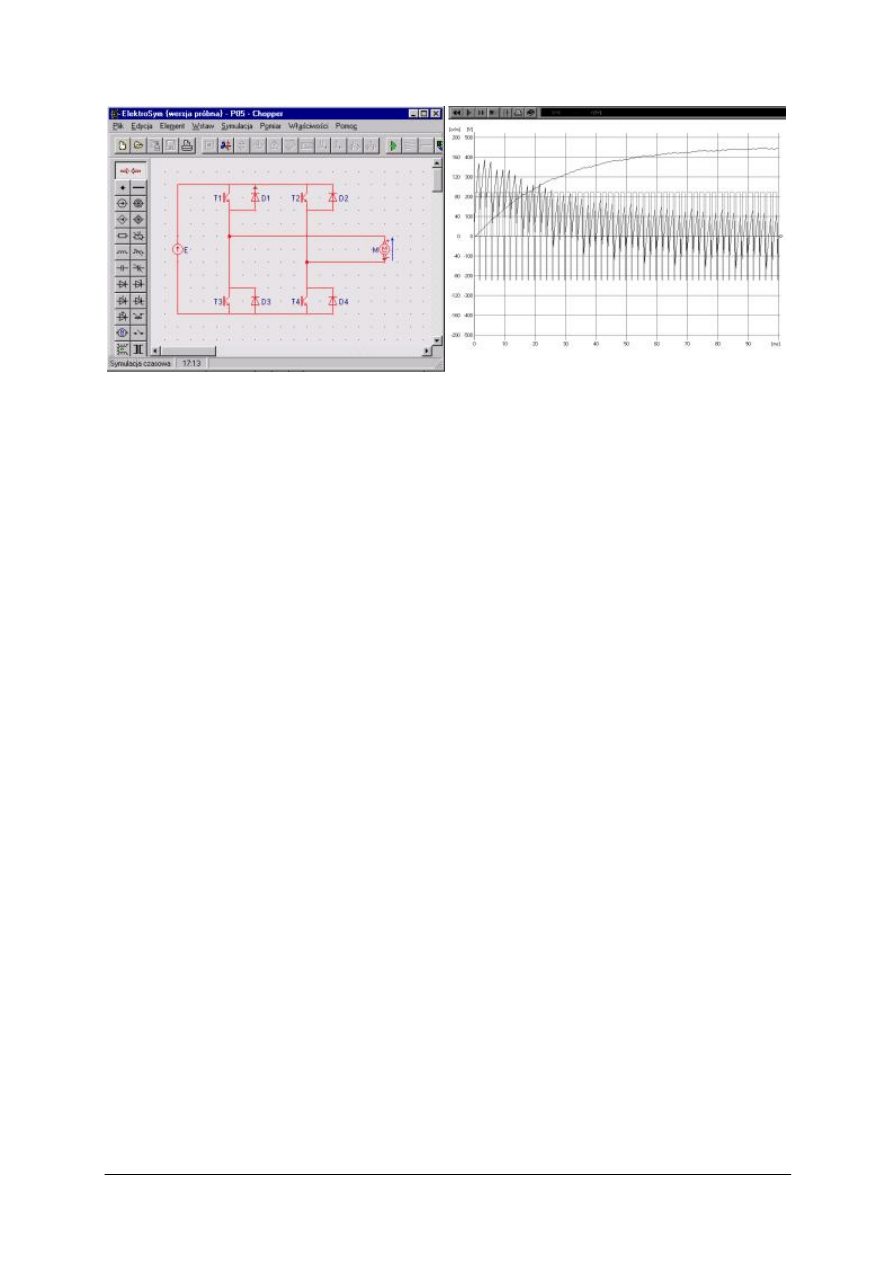
Przykład wykorzystania programu do badania układu czopera i przebiegów napięcia
silnika, prądu i jego prędkości obrotowej
4.1.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) podać wielkości charakteryzujące układ napędowy?
2) podać zależności miedzy podstawowymi parametrami układu
napędowego?
3) zdefiniować stan ustalony i przejściowy?
4) podać definicję charakterystyki mechanicznej silnika?
5) narysować typowe charakterystyki mechaniczne silników
elektrycznych?
6) wyjaśnić, od czego zależy moment dynamiczny układu
napędowego?
7) narysować schemat blokowy elektrycznego układu napędowego?
8) omówić funkcję poszczególnych elementów tego układu?
9) rozróżniać na schemacie funkcjonalnym układu poszczególne jego
bloki?
10) rozpoznać w obiekcie rzeczywistym elementy układu napędowego?
4.2. Układy napędowe z silnikami prądu stałego
4.2.1. Materiał nauczania
Silniki prądu stałego stosowane w napędach regulowanych najczęściej zasila się obecnie
z przekształtników statycznych zbudowanych z wykorzystaniem przyrządów
półprzewodnikowych(diod, tyrystorów, tranzystorów mocy). Zapewnia to napędom duży
komfort regulacji oraz radykalnie zmniejsza gabaryty urządzeń regulacyjnych. Obecnie jako
regulowane źródła prądu stałego w układach napędowych stosuje się najczęściej
elektroniczne układy przekształtnikowe, tzw. układy energoelektroniczne. W napędzie
elektrycznym układ przekształtnikowy zasilający silnik pełni rolę wzmacniacza sygnału
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
sterującego, dając na wyjściu napięcie o zakresie zmienności odpowiadającym pełnemu
wykorzystaniu silnika.
Układy jednofazowe prostowników wykorzystuje się do regulacji prędkości kątowej
silników małej mocy (od 1 do 5 kW) oraz zasilania uzwojenia wzbudzenia, gdyż duża
indukcyjność tego uzwojenia wygładza prąd wyprostowany.
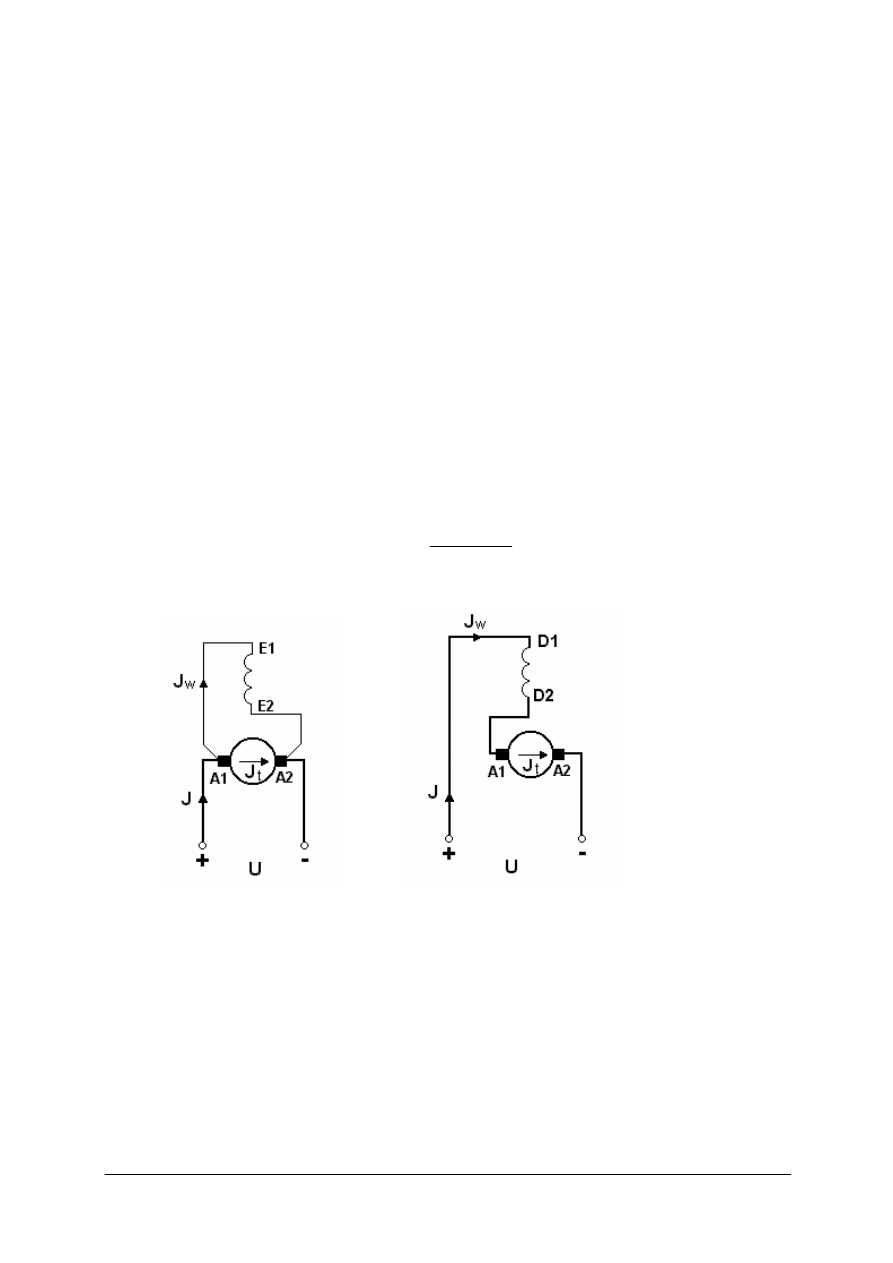
W zależności od sposobu połączenia uzwojenia wzbudzającego wyróżniamy silniki
samowzbudne: bocznikowe, szeregowe i szeregowo-bocznikowe oraz silniki obcowzbudne.
Każdy z nich charakteryzuje się innymi właściwościami ruchowymi. Pracę silnika prądu
stałego charakteryzują następujące wielkości:
U – napięcie zasilania,
M – moment obciążenia,
I – prąd obciążenia (zależny od momentu obciążenia),
n – prędkość obrotowa.
Właściwości ruchowe silników wszystkich typów można określić na podstawie
następujących zależności:
w
M
I
c
M
⋅
Φ
⋅
=
w
w
I
R
E
U
⋅
+
=
w
w
E
I
R
n
c
U
⋅
+
⋅
Φ
⋅
=
Φ
⋅
⋅
−
=
E
w
w
c
I
R
U
n
gdzie c
M
, c
w
są stałymi zależnymi od parametrów silnika.
a)
b)
Rys. 4. Typy silników prądu stałego: a) bocznikowy,
b) szeregowy
Najistotniejsze właściwości ruchowe silników przedstawiane są za pomocą
charakterystyk:
–
n = f(I) lub n = f(M) przy U = const i R = const zwanych charakterystykami
mechanicznymi silnika prądu stałego,
–
M = f(I) przy U = const i R=const zwanej charakterystyką momentu silnika prądu stałego.
W układach napędowych prądu stałego stosuje się najczęściej strukturę szeregową
(kaskadową) regulatora prędkości z podporządkowanym regulatorem prądu twornika.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
Rys. 5. Prostownik 6T do zasilania twornika silnika prądu stałego
W układach napędowych prądu stałego występuje:
– jednokierunkowy układ napędowy,
– dwukierunkowy układ napędowy.
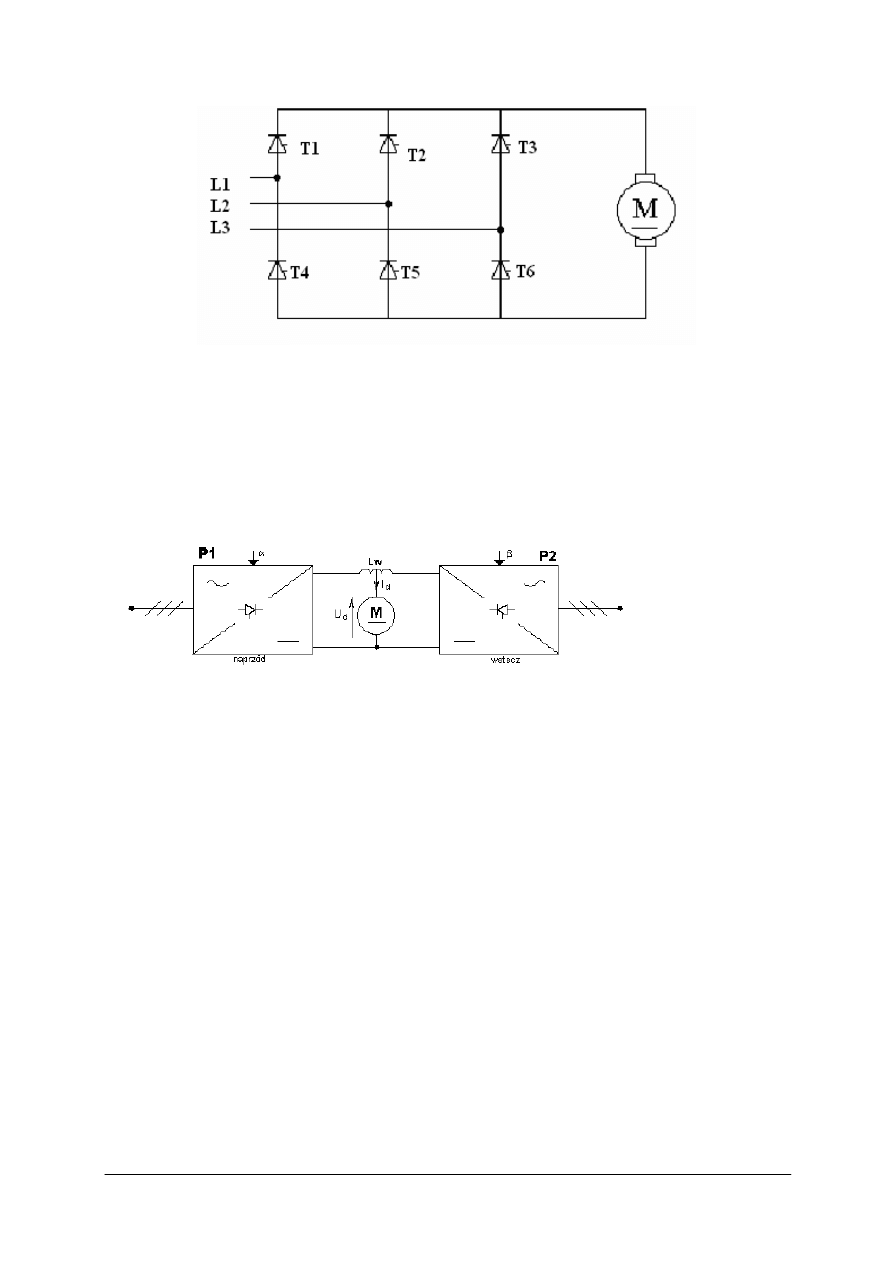
Płynna zmiana kierunku obrotów jest możliwa do uzyskania przy zastosowaniu
prostownika rewersyjnego (nawrotnego, dwukierunkowego) stanowiącego połączenie dwóch
prostowników 6T – rys.6
Rys. 6. Przekształtnik nawrotny z dławikiem wyrównawczym [2]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
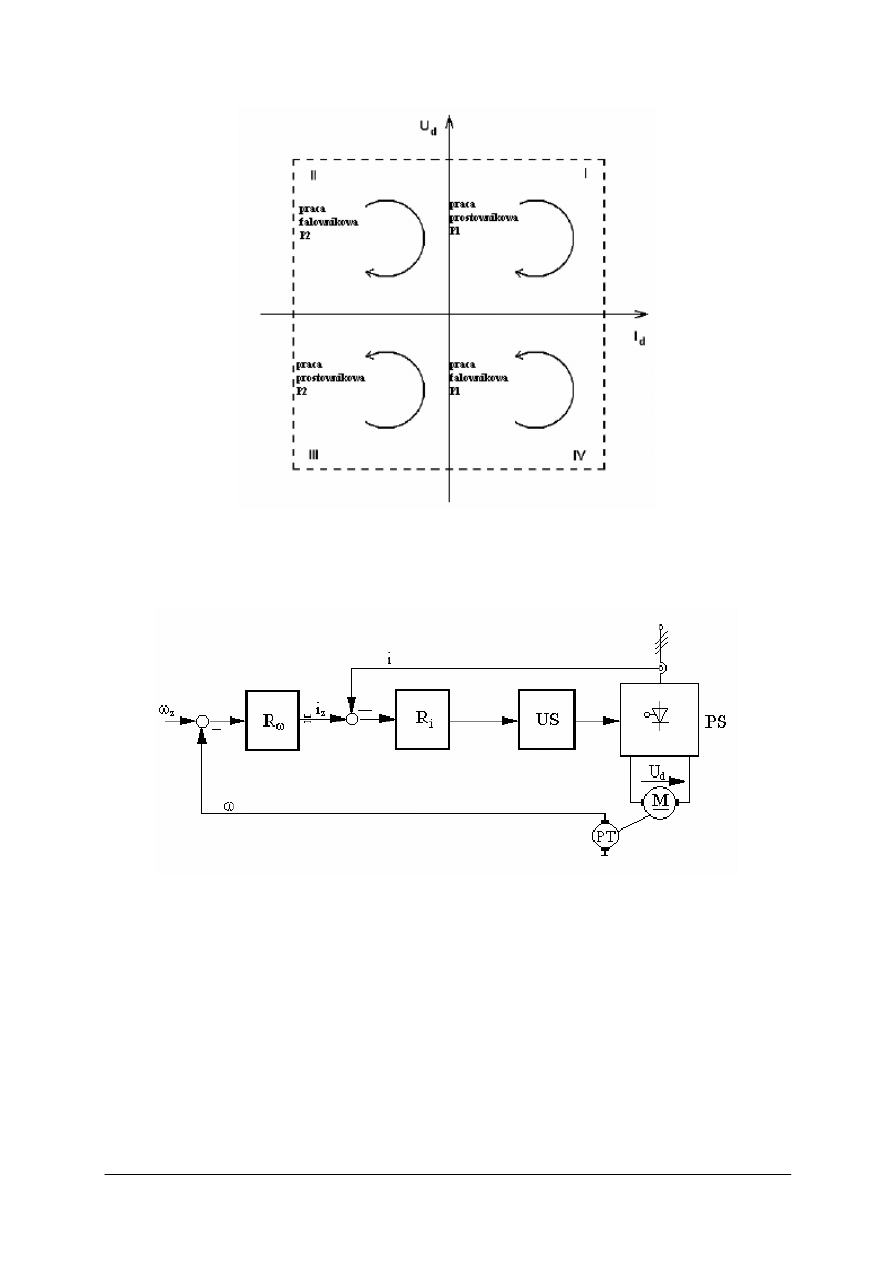
17
Rys. 7. Obszary pracy przekształtnika nawrotnego [2]
W napędzie prądu stałego stosowana jest przy małych mocach struktura równoległa
regulatorów, a przy większych mocach struktura szeregowa. Struktura szeregowa składa się
z połączonych kaskadowo regulatorów PI prędkości i prądu twornika – rys. 8.
Rys. 8. Szeregowy układ regulacji z silnikiem prądu stałego [10]
W obwodzie nadrzędnym regulator prędkości
ω
R
na podstawie różnicy sygnałów
prędkości zadanej
z
ω
i prędkości mierzonej
ω
określa zadaną wartość prądu twornika i
z
dla
podporządkowanego regulatora prądu. Regulator prądu
i
R za pośrednictwem układu
sterowania tyrystorami US wymusza zmianę napięcia zasilającego silnik, co powoduje
zmianę wartości prądu twornika. Ograniczenie sygnału wyjściowego z regulatora prędkości,
umożliwia w tym układzie sterowania, ograniczenie prądu silnika. Ograniczenie napięcia
wyjściowego przekształtnika odbywa się przez odpowiednie ograniczenie sygnału
wyjściowego regulatora prądu.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
Dobór nastaw regulatorów w układach napędowych
Różne zastosowania stawiają różne wymagania co do zachowania się układów
napędowych w stanach przejściowych. Aby określić, jak układ reaguje w tych stanach,
konieczne jest określenie kryteriów regulacji.
W energoelektronicznych układach napędowych stosowane są regulatory typu: P, PI, I,
oraz I z ograniczonym wzmocnieniem.
Parametry regulatorów w układach napędowych przedstawia tabela 1.
Tabela 1. Parametry regulatorów w układach napędowych [10]
Rodzaj regulatora
Parametry elementów korekcyjnych
P
B
F
R
R
k
=
I
F
B
C
R
T
=
PI
F
F
C
R
T
=
B
F
R
R
k
=
I z ograniczonym wzmocnieniem
B
F
R
R
k
=
F
F
C
R
T
=
W większości układów regulacji napędów elektrycznych stosowana jest korekcja
szeregowa. Układy regulacji napędów z silnikiem obcowzbudnym zawierają najczęściej
dwa obwody regulacji: prądu wirnika i prędkości obrotowej. Wyróżnić można układy
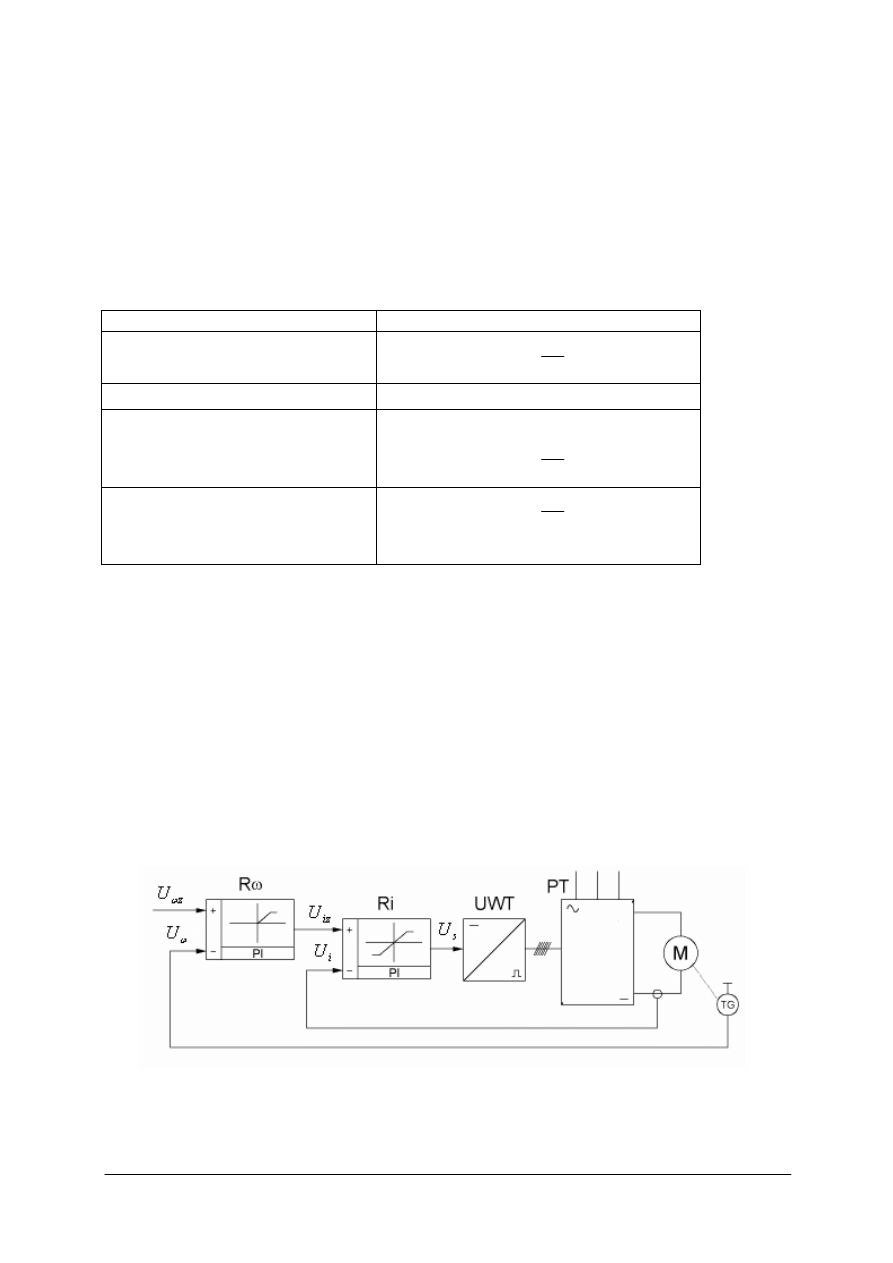
z szeregowym oraz równoległym połączeniem regulatorów. Na rysunku 9 został
przedstawiony układ regulacji napędu z korekcją szeregową i szeregowym połączeniem
regulatorów. Zawiera on dwa obwody regulacji.
Zewnętrznym jest obwód regulacji prędkości z regulatorem prędkości
ω
R a wewnętrznym
obwód regulacji prądu z regulatorem prądu
Ri. W regulatorze prędkości porównywana jest
wartość zadana
z
U
ω
z wartością rzeczywistą
ω
U . Sygnał wyjściowy regulatora prędkości jest
sygnałem wejściowym dla wewnętrznego obwodu regulacji prądu i tym samym wielkością
zadaną dla regulatora prądu. Przebiegi w wewnętrznym obwodzie regulacji zależą więc od
procesów zachodzących w zewnętrznym obwodzie regulacji prędkości. Dlatego zewnętrzny
obwód regulacji nazywamy nadrzędnym, a wewnętrzny podporządkowanym.
Rys. 9. Układ regulacji napędu z prostownikiem tyrystorowym nienawrotnym – korekcja szeregowa z
szeregowym połączeniem regulatorów [10]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
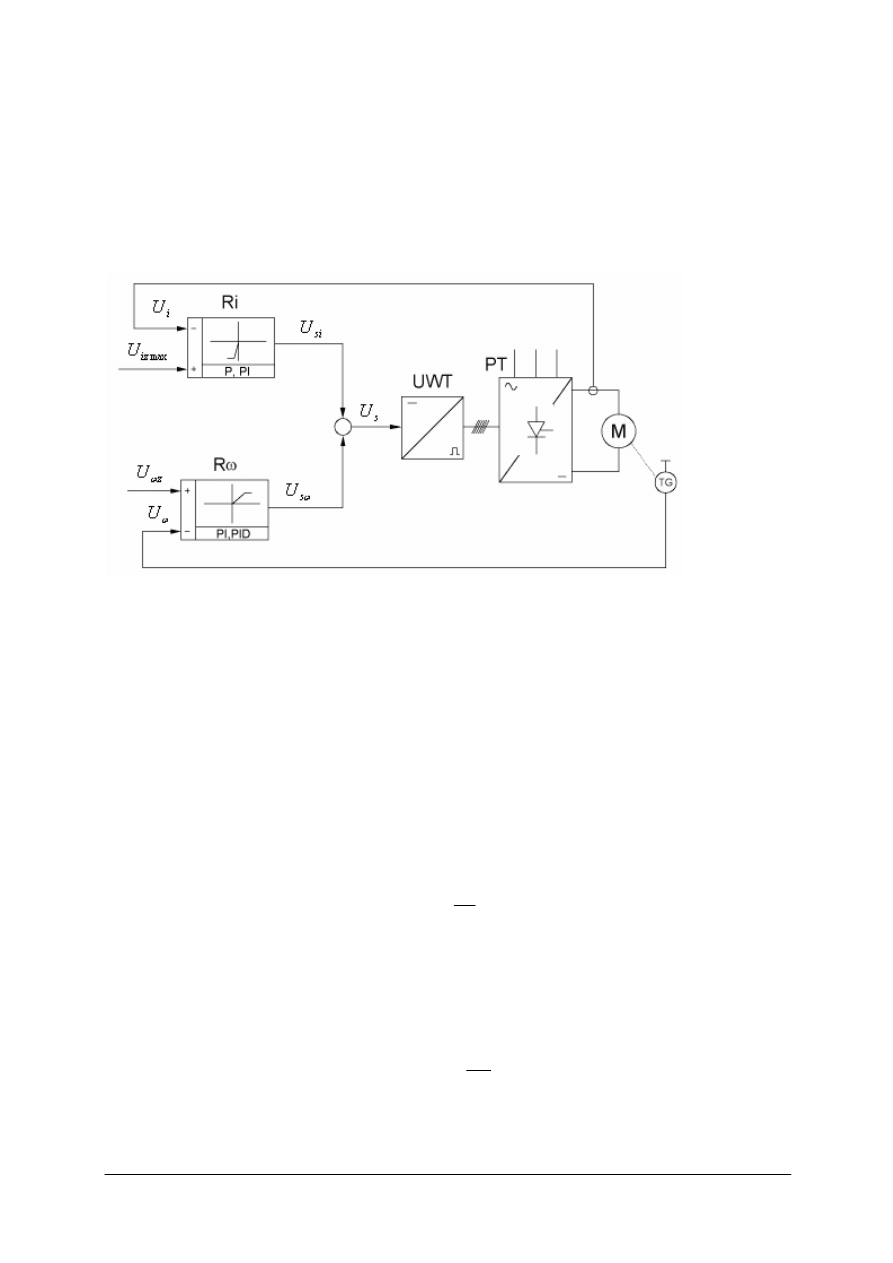
Można spotkać się również z układem regulacji z korekcją szeregową, w którym
regulatory połączone są równolegle (rys. 10). Gdy sygnał proporcjonalny do wartości prądu
wirnika silnika
U
i
jest mniejszy od zadanej wartości maksymalnej U
izmax
(prąd silnika
mniejszy od dopuszczalnego) wówczas aktywny jest regulator prędkości
ω
R (sygnał
z regulatora
Ri równy zero). Jeśli prąd wzrośnie powyżej wartości dopuszczalnej wtedy
poprzez odpowiednie ukształtowanie charakterystyki regulatora prądu sygnał wyjściowy tego
regulatora osiąga w krótkim czasie wartość ujemną, co powoduje ograniczenie prądu silnika.
Rys. 10. Układ regulacji napędu z prostownika tyrystorowym nienawrotnym – korekcja szeregowa
z równoległym połączeniem regulatorów [10]
W układach napędowych najczęściej stosowane są regulatory typu PI. Zastosowanie
regulatorów typu P (proporcjonalnych) nie jest zalecane ze względu na brak astatyzmu,
natomiast regulator typu I charakteryzuje wydłużony czas reakcji, a zatem jest gorsza
dynamika układu. Regulator PID zalecany jest w przypadku obiektów o dwóch dominujących
stałych czasowych. Jeśli chodzi o dobór nastaw regulatorów to w praktyce na ogół korzysta
się z kryterium optimum modułu i kryterium optimum symetrii
.
Stałe czasowe silnika prądu stałego
Przebiegi czasowe prądu i prędkości kątowej silnika w stanach dynamicznych zależą od
stałych czasowych silnika. Znajomość tych stałych jest potrzebna do doboru nastaw
regulatora sterującego przekształtnikiem.
– Stała czasowa elektromagnetyczna twornika
r
r
E
R
L
T
=
gdzie:
r
L
– indukcyjność obwodu twornika silnika,
r
R
– rezystancja obwodu twornika silnika.
– Stała czasowa elektromagnetyczna wzbudzenia
F
F
F
R
L
T
=
gdzie:
F
L
– indukcyjność obwodu wzbudzenia silnika,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
F
R
– rezystancja obwodu wzbudzenia silnika.
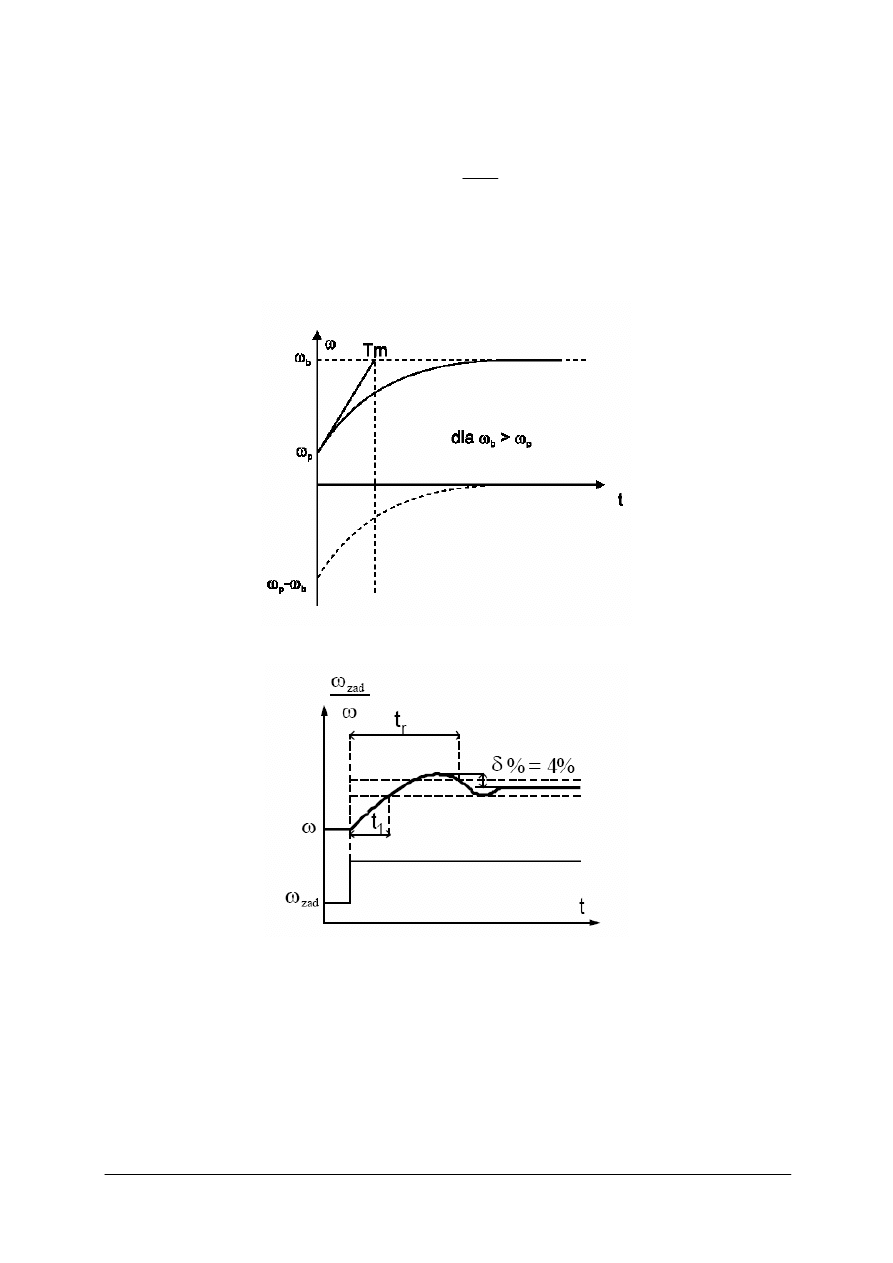
– Stała czasowa mechaniczna
N
N
M
M
J
T
ω
=
gdzie:
J – moment bezwładności silnika
N
ω
– znamionowa prędkość kątowa silnika
N
M – znamionowy moment obrotowy rozwijany przez silnik
Rys. 11. Sposób wyznaczania mechanicznej stałej czasowej T
M
[9]
Rys. 12. Przebieg odpowiedzi czasowej układu sterowania na skokowe zmiany wielkości sterującej
z
ω
[2]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
4.2.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie znasz układy jednofazowych prostowników sterowanych dwupulsowych?
2. Jakie czynniki mają wpływ na dynamikę układu napędowego silnika jednofazowego
zasilanego z prostownika sterowanego?
3. W jaki sposób wyznacza się charakterystyki zewnętrzne prostownika?
4. Jakim sprzętem można zbadać właściwości dynamiczne układu napędowego?
5. W jaki sposób dokonuje się rozruchu silnika prądu stałego?
6. Jakie parametry ze sobą wiąże charakterystyka mechaniczna silnika?
7. Jak ograniczyć wartość prądu w układzie napędowym prądu stałego?
8. Jak dobierać regulator prądu w napędzie prądu stałego?
9. Jak dobierać regulator prędkości w napędzie prądu stałego?
4.2.3 Ćwiczenia
Ćwiczenie 1
Zbadaj silnik prądu stałego zasilanego z jednofazowego prostownika sterowanego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) wyznaczyć charakterystykę zewnętrzną prostownika
)
(
d
d
I
f
U
=
dla kilku różnych
wartości napięcia zadającego (
.
const
u
Z
=
i
.
const
Z
=
α
),
2) wyniki zapisać w tabeli
3) na podstawie pomiarów należy wykonać wykresy
)
(
d
d
I
f
U
=
,
4) narysować przebiegi napięcia i prądu na wyjściu prostownika przy różnych kątach
załączenia tyrystorów (za pomocą oscyloskopu katodowego),
5) połączyć układ zgodnie ze schematem na rysunku,
6) wyznaczyć charakterystykę mechaniczną silnika dla kilku różnych wartości napięcia
zadającego
.
const
u
Z
=
i
.
const
Z
=
α
,
7) zapisać wyniki pomiarów w tabeli,
8) wykreślić na podstawie pomiarów i obliczeń charakterystyki mechaniczne silnika
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
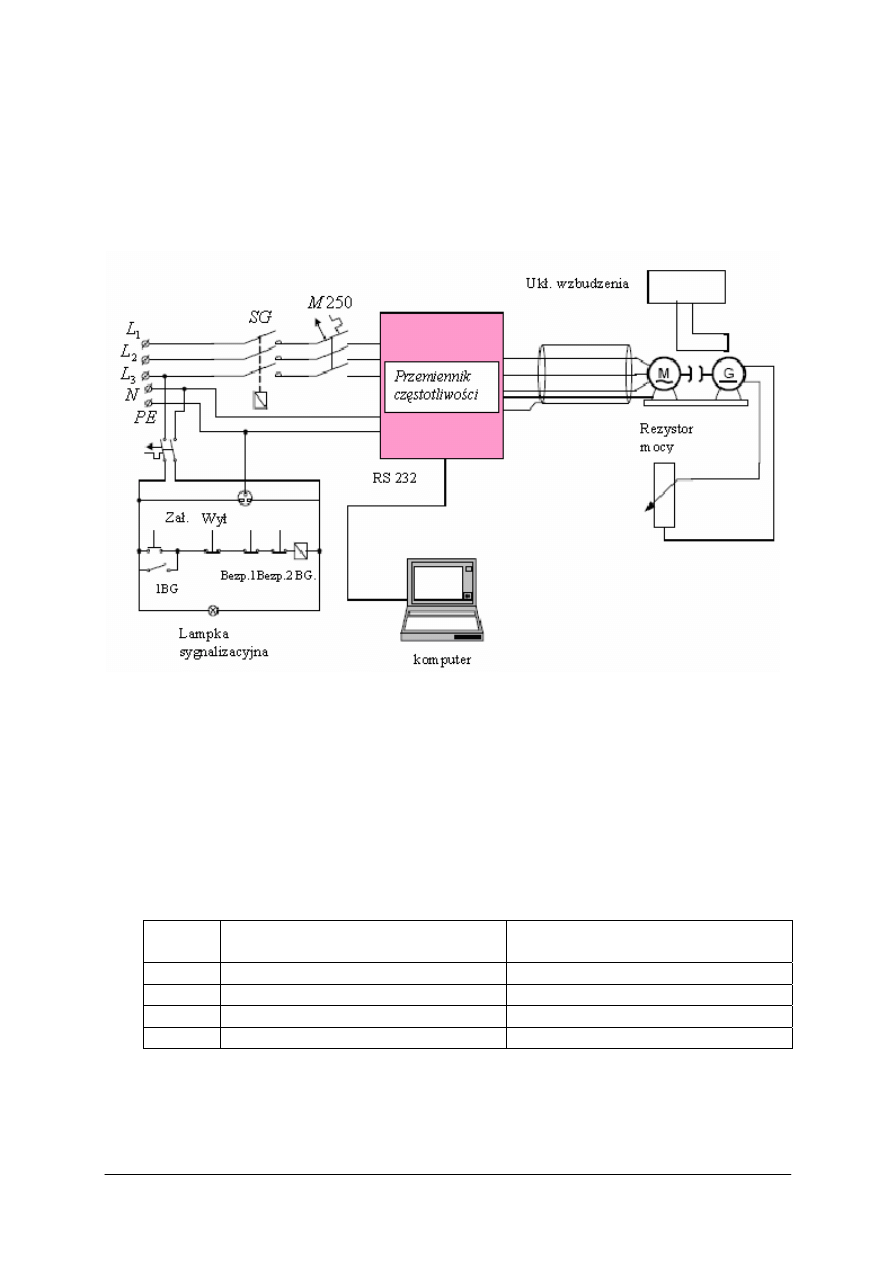
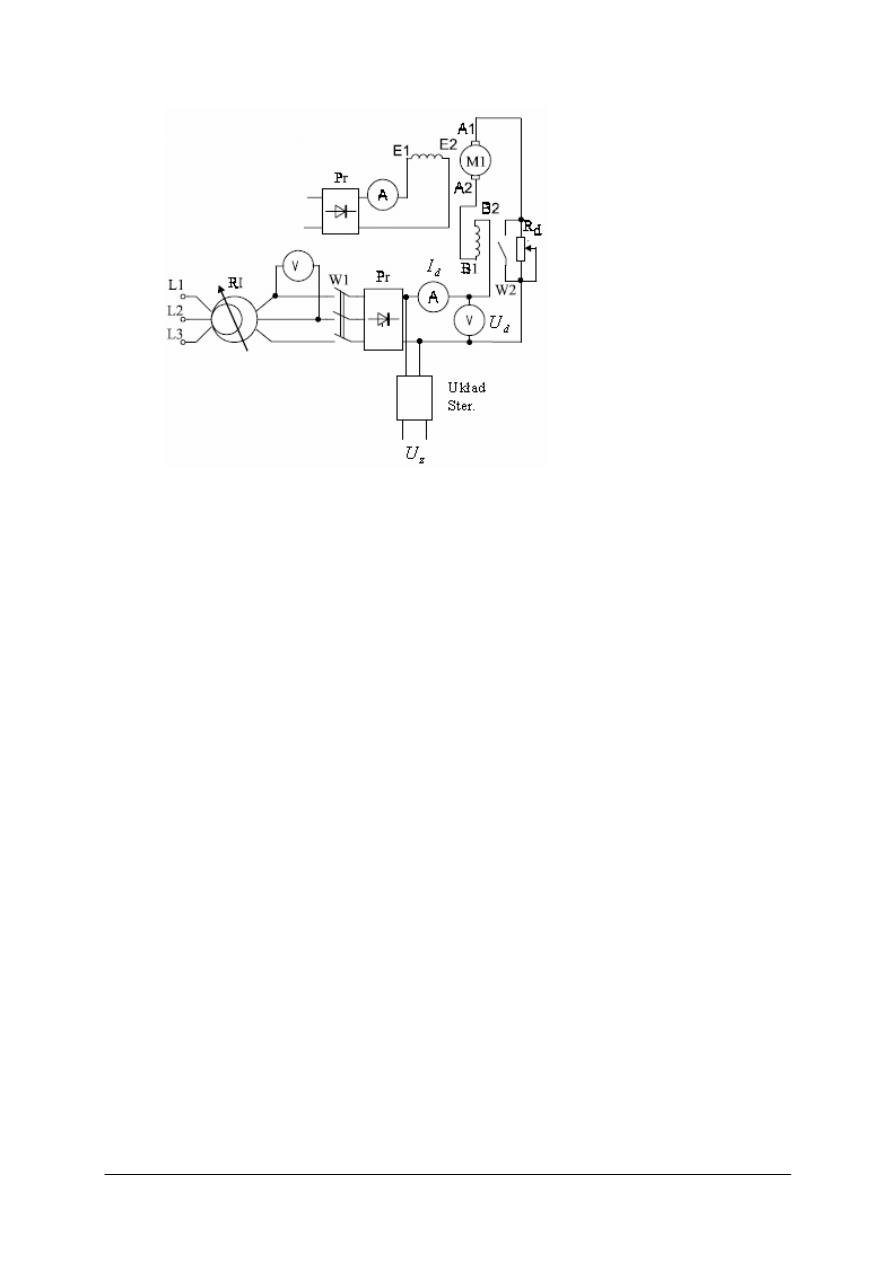
Schemat układu pomiarowego
Wyposażenie stanowiska pracy:
−
prostownik sterowany,
−
silnik,
−
maszyna obciążająca (prądnica prądu stałego),
−
amperomierz,
−
woltomierz,
−
prostownik niesterowany,
−
rezystory regulowane,
−
przybory kreślarskie,
−
papier milimetrowy.
Ćwiczenie 2
Zbadaj dynamikę układu silnika prądu stałego zasilanego z jednofazowego prostownika
prądu stałego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) dokonać rozruchu silnika,
2) zarejestrować przebiegi:
)
(
t
f
I
d
=
,
)
(t
f
=
ω
za pomocą układu rejestrującego,
3) zaobserwować wpływ wartości ograniczenia prądowego na przebieg rozruchu.
Wyposażenie stanowiska pracy:
– prostownik sterowany,
– silnik,
– maszyna obciążająca (prądnica prądu stałego),
– amperomierz,
– woltomierz,
– prostownik niesterowany,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
– rezystory regulowane,
– przybory kreślarskie,
– papier milimetrowy.
Schemat układu pomiarowego
Wyposażenie stanowiska pracy:
– prostownik sterowany,
– silnik,
– maszyna obciążająca (prądnica prądu stałego),
– amperomierz,
– woltomierz,
– prostownik niesterowany,
– rezystory regulowane,
– przybory kreślarskie,
– papier milimetrowy.
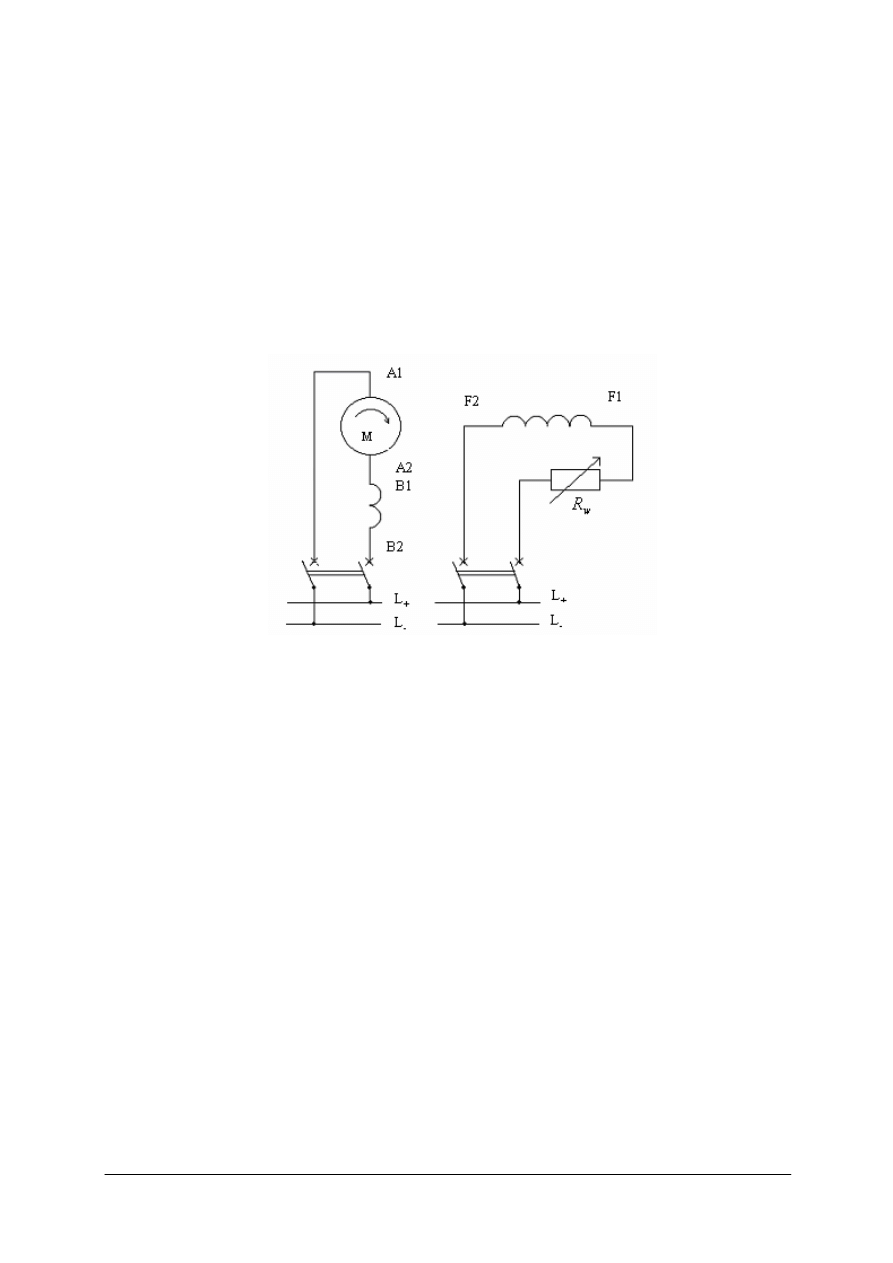
Ćwiczenie 3
Zbadaj silnik prądu stałego zasilanego z różnych źródeł.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) połączyć silnik prądu stałego zgodnie ze schematem obwodu.
2) wyznaczyć charakterystyki mechaniczne i regulacyjne zasilając go z:
– mostka Graetza,
– pojedynczej diody,
– układu 6-pulsowego,
– źródła stabilizowanego.
3) narysować charakterystyki na papierze milimetrowym.
4) wyciągnąć wnioski z przeprowadzonego badania.
Schemat układu pomiarowego
Wyposażenie stanowiska pracy:
– prostownik sterowany,
– silnik obcowzbudny,
– mierniki uniwersalne,
– miernik prędkości obrotowej.
Ćwiczenie 4
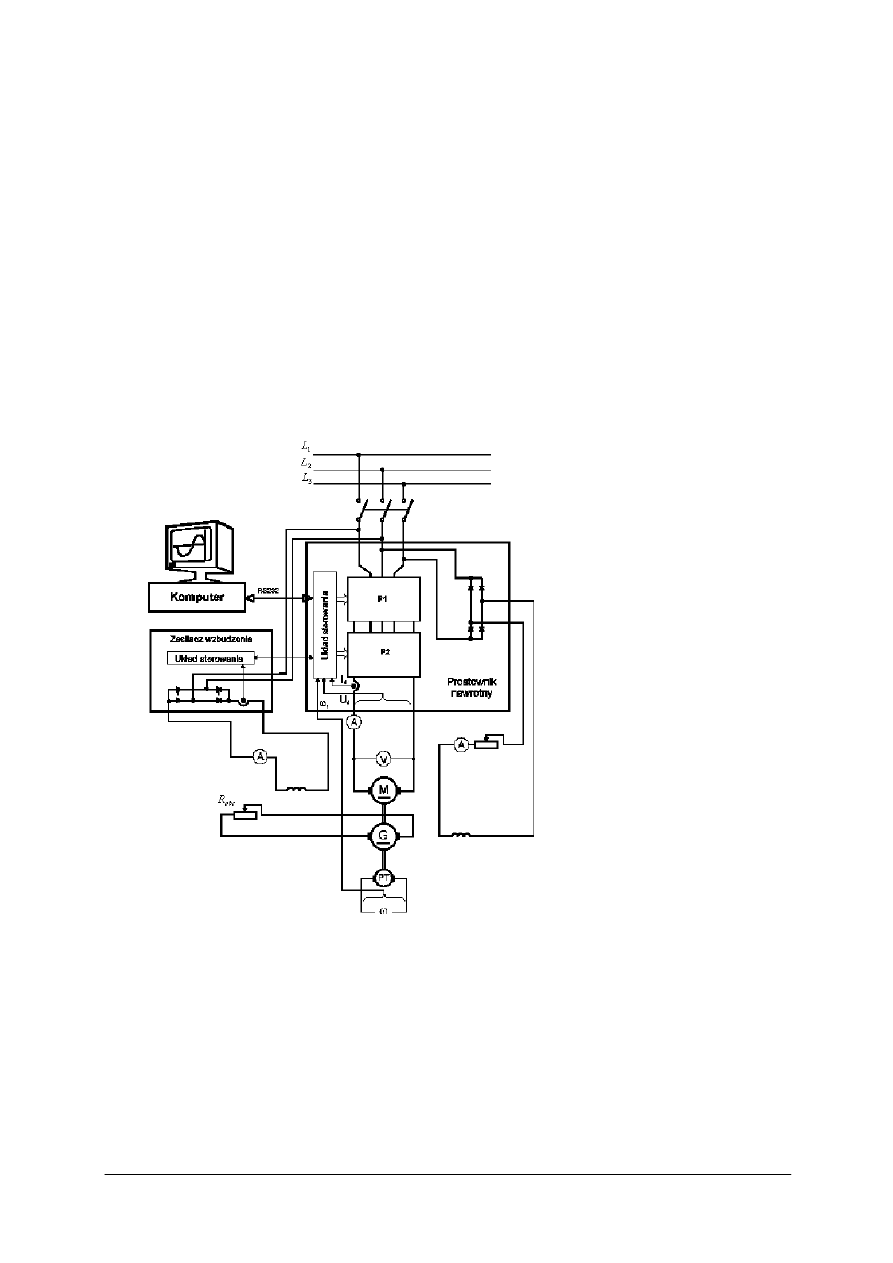
Zbadaj układ napędowy w stanie statycznym i dynamicznym.
Sposób wykonania ćwiczenia.
Aby wykonać ćwiczenie powinieneś:
1) zapoznać się ze stanowiskiem laboratoryjnym,
2) zapoznać się z obsługą i działaniem układu,
3) załączyć układ,
4) zmienić prędkość kątową, przeprowadzić nawrót,
5) wyznaczyć charakterystyki mechaniczne układu przy sprzężeniu prędkościowym dla
różnych prędkości zadanych: 100%, 80%, 60% i 40%. W sprawozdaniu dodatkowo
określić sztywność charakterystyk,
6) wyznaczyć charakterystykę mechaniczną układu przy sprzężeniu prędkościowym dla
80% prędkości zadanej i 50% prądu ograniczenia,
7) sprawdzić zakres regulacji prędkości obrotowej,
8) wyznaczyć ustalony uchyb prędkości przy zmianie obciążenia,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
9) wyznaczyć charakterystykę mechaniczną przy sprzężeniu napięciowym,
10) wyznaczyć charakterystykę dla 80% prędkości zadanej dla różnych nastaw IR,
11) dobrać wartość IR tak, aby uzyskać charakterystykę mechaniczną sztywną,
12) przeprowadzić rejestrację przebiegów w stanie ustalonym dla 3 różnych wartości
prędkości kątowej zadanej. Ustawić minimalny czas rejestracji,
13) przeprowadzić rejestrację przebiegów przy rozruchu silnika dla 6 różnych prądów
ograniczenia,
14) określić czas rozruchu dla każdego z przypadków,
15) wykreślić charakterystykę czasu rozruchu w funkcji prądu ograniczenia,
16) zarejestrować przebiegi przy zatrzymaniu silnika wybiegiem i hamowaniu
przeciwprądem,
17) zarejestrować przebiegi przy wzroście prędkości obrotowej,
18) zarejestrować przebiegi przy zmniejszeniu prędkości obrotowej,
19) zarejestrować przebiegi przy szybkiej zmianie momentu obciążenia.
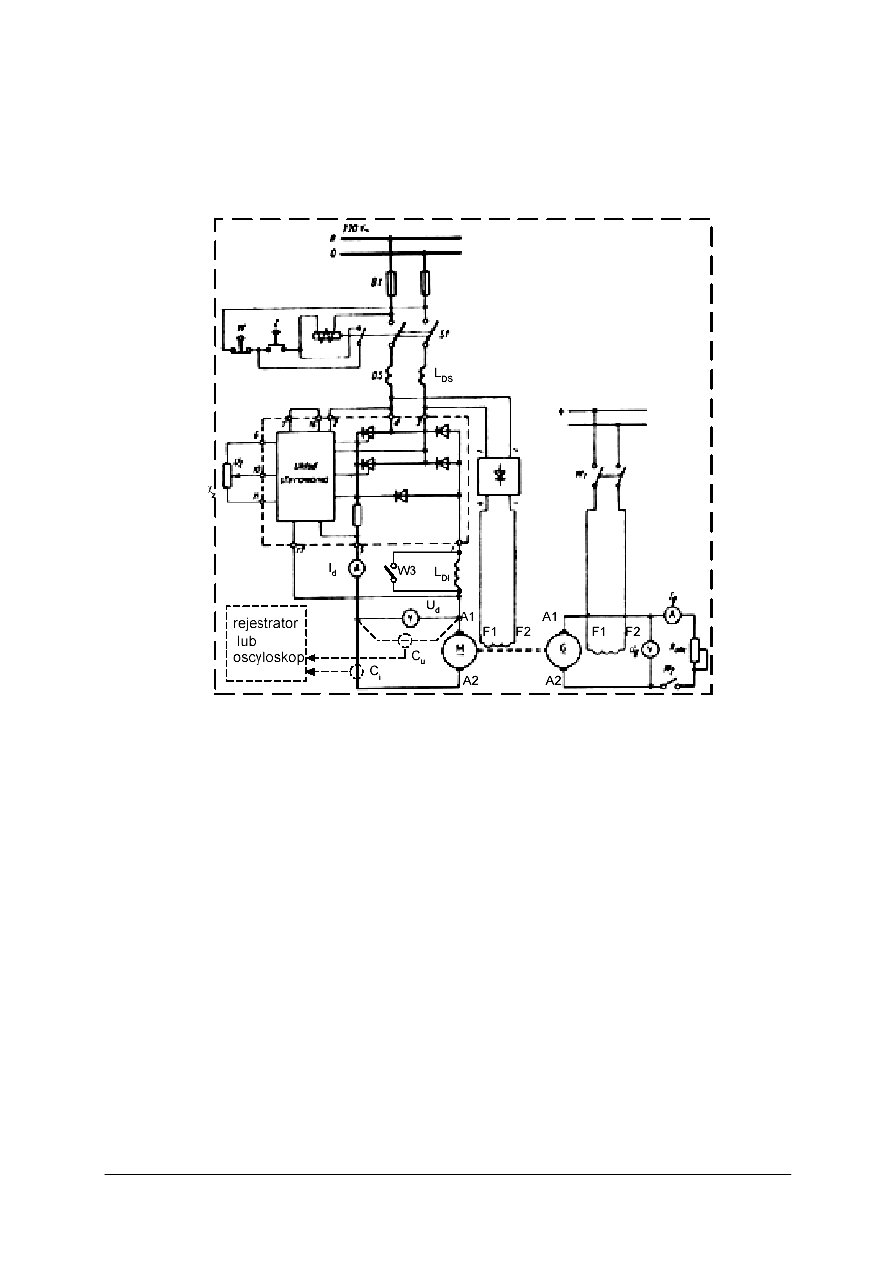
Schemat stanowiska pomiarowego
Wyposażenie stanowiska pracy:
– zestaw napędowy z silnikiem prądu stałego i regulatorem,
– oscyloskop,
– miernik prędkości obrotowej,
– rejestrator,
– kartki papieru,
– długopis, ołówek.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
Ćwiczenie 5
Dobierz nastawy regulatorów w energoelektronicznym układzie napędowym.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zapoznać się ze stanowiskiem do optymalizacji układu napędowego,
2) dostroić układ do stałych czasowych
E
T
i
M
T
silnika napędzanego,
3) nastawić wzmocnienie regulatora prędkości
ω
R na wartość k=1,
4) zadajnikiem prędkości zadać skokowo napięcie,
5) zaobserwować na oscyloskopie przebieg prądu ograniczenia w okresie jego narastania
i w stanie ustalonym,
6) zmienić wartość członów korekcyjnych, tak by uzyskać prawidłowy przebieg prądu
ograniczenia,
7) zwiększyć wzmocnienie regulatora prędkości, jeżeli przebieg prądu ograniczenie uzna za
prawidłowy,
8) skorygować ostatecznie wartości elementów
F
R
i
F
C
obserwując przebiegi prędkości
kątowej przy skokowych wymuszeniach,
9) wyciągnąć wnioski z przeprowadzonych badań.
Wyposażenie stanowiska pracy:
– zestaw napędowy z silnikiem prądu stałego i regulatorem,
– oscyloskop,
– rejestrator,
– kartki papieru,
– długopis, ołówek.
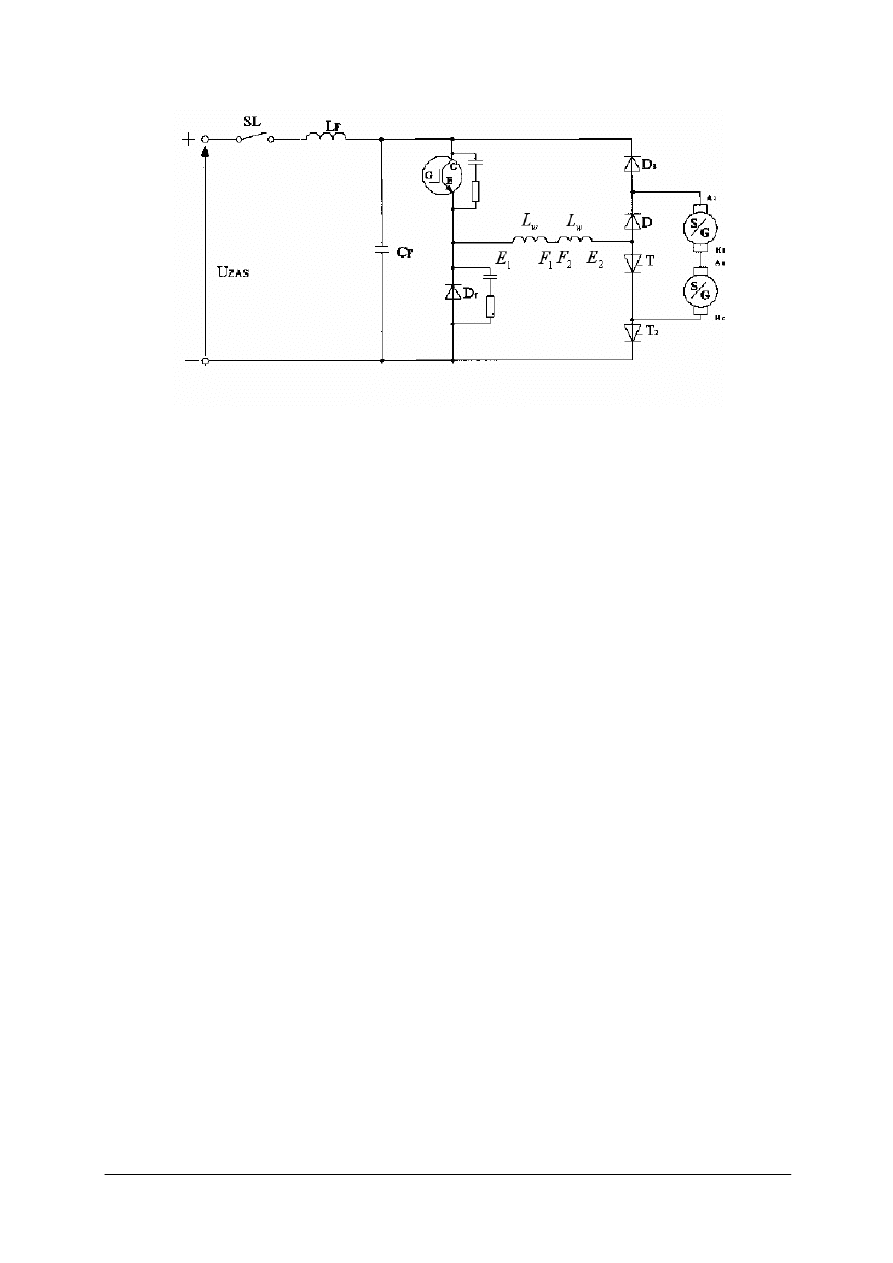
Ćwiczenie 6
Zbadaj impulsowy układ rozruchu i hamowania.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zgromadzić na stanowisku pomiarowym sprzęt niezbędny do wykonania ćwiczenia,
2) połączyć układ pomiarowy,
3) zarejestrować przebiegi prądów i napięć w różnych miejscach obwodu:
– w czasie rozruchu,
– w czasie hamowania odzyskowego,
4) dokonać obserwacji:
– prądu pobieranego z sieci zasilającej,
– prądu płynącego przez uzwojenia wzbudzenia silników,
– napięcia na silniku,
– prędkości obrotowej silników,
5) wydrukować obserwowane przebiegi,
6) wyciągnąć wnioski z otrzymanych ćwiczeń,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
Schemat laboratoryjnego układu impulsowego
Wyposażenie stanowiska pracy:
– układ modelowy do badania impulsowego rozruchu i hamowania z odzyskiem,
– rejestrator,
– miernik prędkości obrotowej,
– kartki papieru,
– długopis.
Ćwiczenie 7
Zbadaj w oparciu o program TCAD układ napędowy z silnikiem prądu stałego zasilanym
z prostownika sterowanego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z obsługą programu,
2) zapoznać się z topologią i parametrami badanego układu,
3) narysować schemat układu napędowego z silnikiem prądu stałego zasilanym
z prostownika sterowanego
4) dla dobranych nastaw zarejestrować przebiegi (prąd twornika i prędkość kątowa) przy
rozruchu silnika do zadanych prędkości w zadanych warunkach obciążenia maszyny.
Określić parametry rozruchu.
5) zarejestrować przebiegi przy zmniejszaniu prędkości silnika,
6) zarejestrować przebiegi przy skokowym obciążeniu i odciążeniu maszyny, określić
parametry procesu przejściowego,
7) wyciągnąć wnioski z przeprowadzonych pomiarów.
Wyposażenie stanowiska pracy:
– komputer z oprogramowaniem,
– drukarka,
– kalkulator,
– kartki papieru,
– długopis.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
4.2.4.
Sprawdzian postępów
Czy potrafisz:
Tak
Nie
porównać układy prostowników jednofazowych?
dobrać sprzęt pomiarowy do wyznaczenia charakterystyki zewnętrznej
prostownika?
narysować charakterystyki mechaniczne silnika zasilanego z prostownika
sterowanego?
omówić charakterystyki mechaniczne silnika zasilanego z prostownika
sterowanego?
omówić przebiegi prądu w obwodzie twornika przy zasilaniu napięciem
pulsującym z prostownika sterowanego jednofazowego
dwupulsowego?
omówić przebiegi napięcia w obwodzie twornika przy zasilaniu
napięciem pulsującym z prostownika sterowanego jednofazowego
dwupulsowego?
omówić działanie ograniczenia prądowego?
omówić wpływ ograniczenia prądowego na dynamikę układu?
narysować przebiegi prądu twornika, momentu i prędkości obrotowej w
czasie rozruchu regulowanego układu napędowego bez obciążenia?
omówić działanie nawrotnego układu napędowego pracującego bez
prądów wyrównawczych przy zmianie kierunku obrotów silnika?
dobrać regulator prądu w napędzie prądu stałego?
dobrać regulator prędkości w napędzie prądu stałego?
4.3. Układy napędowe z silnikami prądu przemiennego
4.3.1. Materiał nauczania
Klasyfikacji układów napędowych prądu przemiennego dokonuje się ze względu na:
– sposób rozruchu,
– sposób regulacji prędkości,
– zastosowany przekształtnik,
– zastosowany układ regulacji,
– zastosowany system sterowania,
– zastosowany sposób kształtowania napięcia i prądu przemiennego w obwodzie silnika
napędowego.
Krótki opis energoelektronicznych układów sterowania
W napędach urządzeń przemysłowych wykorzystuje się różnorakie odmiany układów
przekształtnikowych, umożliwiających regulację prędkości i momentu obrotowego oraz
sterowanie procesami rozruchu, hamowania i nawrotu silnika. Z najczęściej stosowanych
rozwiązań można wymienić:
– tyrystorowe regulatory napięcia przemiennego,
– bezpośrednie przemienniki częstotliwości,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
– tyrystorowe kaskady podsynchroniczne,
– przemienniki częstotliwości pośrednie z falownikami napięcia i prądu.
W ogólnym przypadku prędkość silnika może być opisana następująco:
)
1
(
60
)
1
(
1
1
s
p
f
s
n
n
−
=
−
=
,
co wykazuje, że na prędkość ma wpływ:
1)
1
f
– częstotliwość napięcia zasilania uzwojeń stojana,
2) p – liczba par biegunów uzwojenia stojana silnika,
3) s – poślizg silnika, który można zmieniać poprzez odpowiednie kształtowanie przebiegu
charakterystyki mechanicznej silnika przy pomocy:
a) włączenia do obwodu dodatkowej rezystancji
d
R ,
b) zmiany wartości napięcia zasilającego obwód stojana,
c) wprowadzenia dodatkowego napięcia do obwodu wirnika silnika pierścieniowego.
Tendencje rozwojowe w tej grupie układów polegają na wprowadzeniu przyrządów
w pełni wyłączalnych i zastosowaniu sterowania PWM (Pulse Width Modulation – modulacja
szerokości impulsów), co umożliwia zmniejszenie zniekształceń napięcia i prądu silnika,
eliminację niekorzystnych harmonicznych niskiego rzędu w prądzie pobieranym z sieci oraz
pracę układu przy współczynniku mocy (cos
φ
) bliskim jedności.
Napędy asynchroniczne z tyrystorowymi regulatorami napięcia (tzw. sterownikami
tyrystorowymi) ze względu na małą sprawność i duże zniekształcenia prądu są stosowane
w
ograniczonym zakresie do regulacji silników, a znacznie częściej w układach
rozruchowych napędów średniej i dużej mocy.
Układy z falownikami napięcia znajdują ostatnio coraz szersze zastosowanie zarówno
w napędach przemysłowych małej i średniej mocy (do 1000 kW), jak również
w serwonapędach obrabiarek i robotów przemysłowych, zastępując często dotychczas
wykorzystywane napędy z silnikami prądu stałego.
Regulacja prędkości obrotowej silnika indukcyjnego
Najkorzystniejszą metodą regulacji prędkości obrotowej silnika indukcyjnego jest tzw.
regulacja częstotliwościowa, polegająca na zmianie częstotliwości napięcia zasilającego silnik
przy równoczesnej zmianie wartości skutecznej napięcia. Regulację taką umożliwiają
urządzenia energoelektroniczne – przemienniki częstotliwości bezpośrednie lub pośrednie
z falownikami napięcia i prądu.
Przemienniki częstotliwości to urządzenia energoelektroniczne stosowane głównie
w układach regulacji silników elektrycznych prądu przemiennego.
Dzięki ich użyciu możliwe jest
przekształcanie napięcia oraz prądu wejściowego w napięcie i prąd wyjściowy o dowolnie
kształtowanym przebiegu okresowym o częstotliwości w granicach od kilku Hz do kilkuset kHz.
Prędkość obrotowa n silników asynchronicznych jest stała i przy określonej konstrukcji
silnika wyraża się zależnością
:
p
s
f
n
)
1
(
60
−
=
gdzie: f – częstotliwość prądu (Hz),
s – poślizg określony jako różnica pomiędzy prędkością synchroniczną
wirującego pola magnetycznego a prędkością wirnika odniesiona do prędkości
synchronicznej,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
p – liczba par biegunów.
Moment obrotowy M (Nm) oraz moc 3-fazowego silnika P (W) można obliczyć z zależności
:
n
P
n
P
P
M
55
,
9
2
60 ≅
=
=
π
ω
ϕ
cos
3UI
P
=
w których: n – prędkość obrotowa (obr./min), U – napięcie (V), I – natężenie prądu (A),
cosφ – współczynnik mocy (stosunek mocy czynnej do pozornej).
Ze wzoru na prędkość obrotową wynika, że regulacja prędkości obrotowej silnika może
być realizowana poprzez:
– zmianę liczby par biegunów silnika (przez przełączanie uzwojeń),
– zmianę poślizgu prędkości n w stosunku do synchronicznej prędkości
S
n pola
magnetycznego (zmiana rezystancji obwodów silnika),
– zmianę częstotliwości f prądu zasilającego silnik.
Ostatni z wymienionych tu sposobów regulacji prędkości obrotowej silnika, zgodnie ze
wzorami prowadzi w efekcie do prostej relacji:
f
U
c
M
=
Wynika stąd, że dla zachowania niezmiennej wartości momentu obrotowego na wale
silnika (c = const), konieczne jest zachowanie stałego stosunku U/f. O zależności tej należy
pamiętać przy realizacji układów z użyciem przetwornicy częstotliwości.
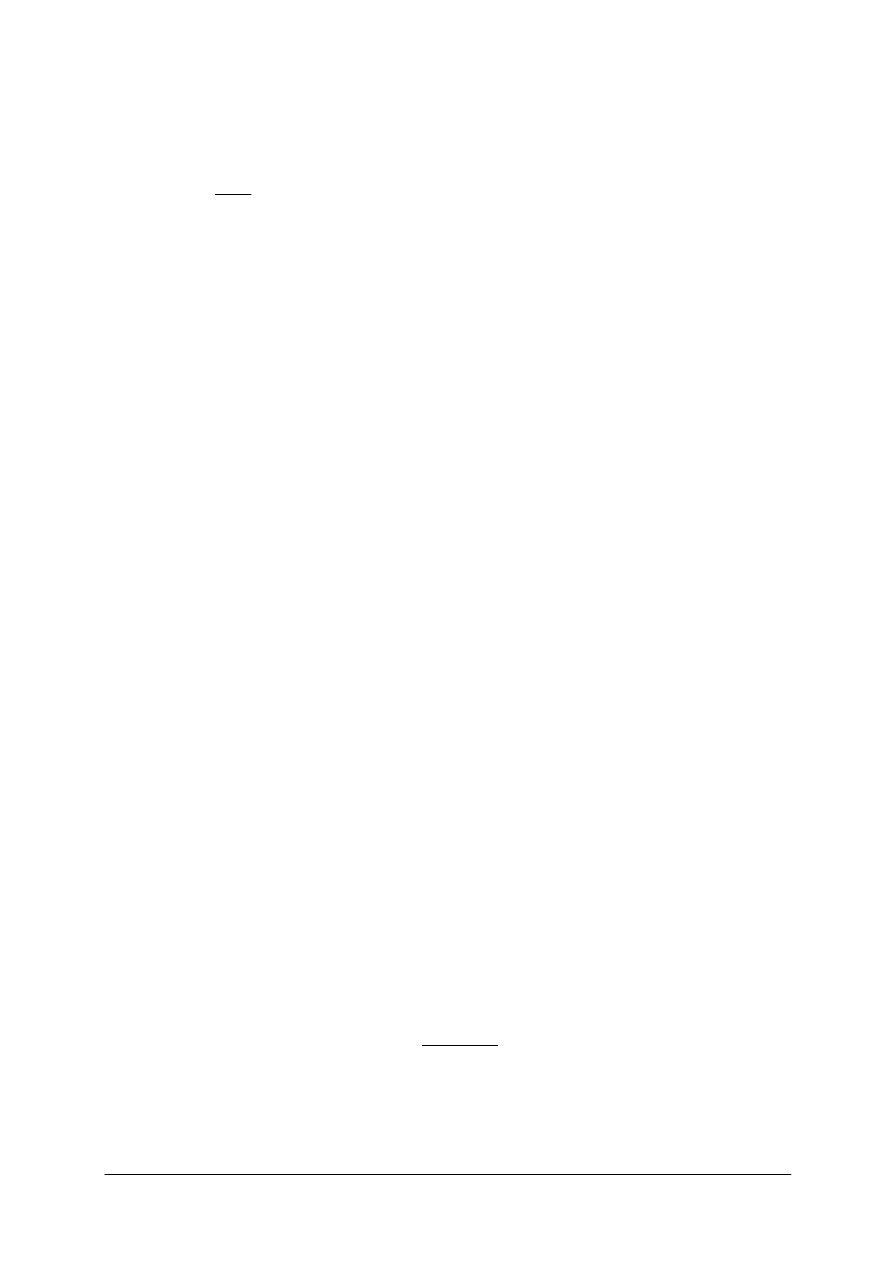
Rys. 13. Charakterystyki mechaniczne przy różnych częstotliwościach napięcia zasilającego stojan [9]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
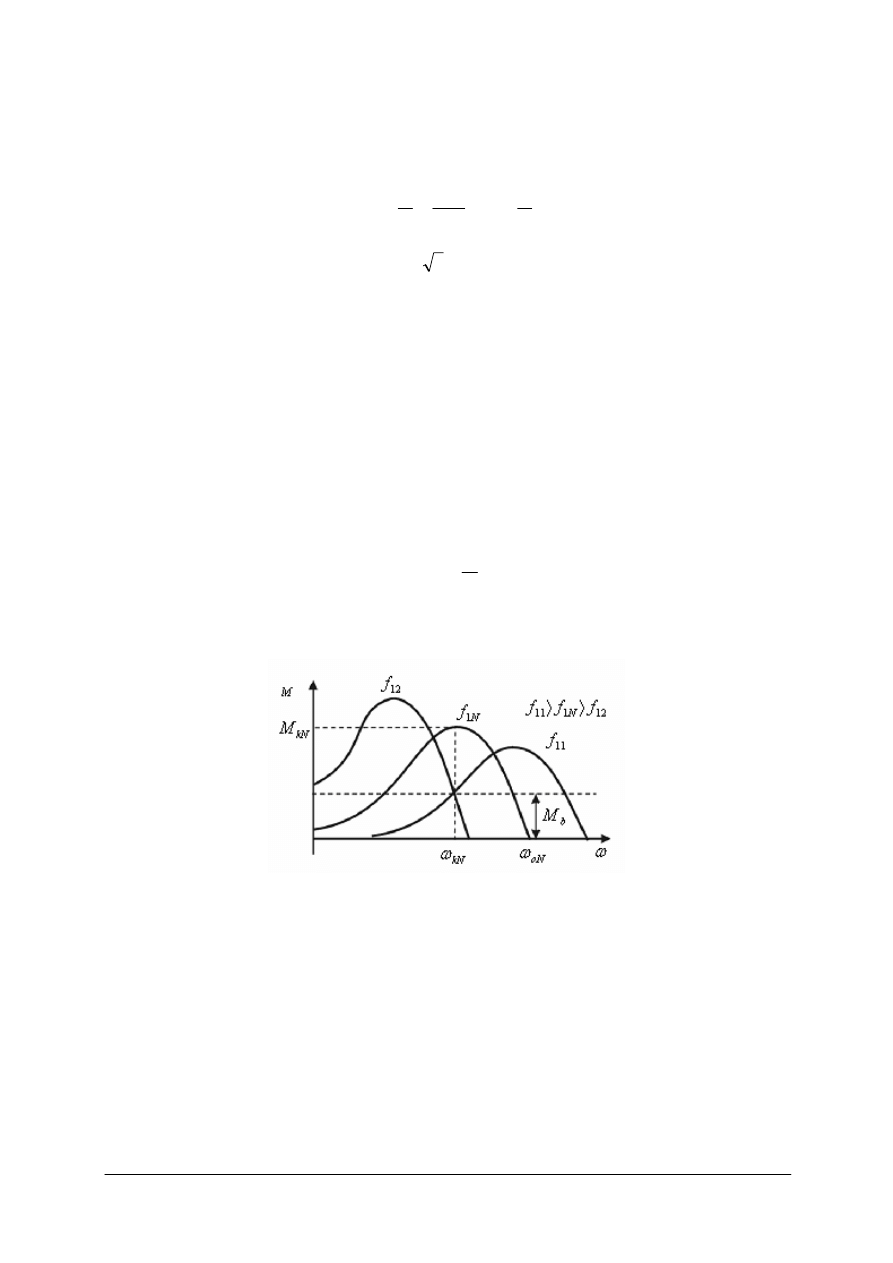
Rys. 14. Charakterystyki mechaniczne przy zachowaniu U/f=const. [9]
Przy założonej prędkości obrotowej silnika, na przykład n = 750 obr/min oraz napięciu
U = 380 V, stosunek ten wyniesie 380/50 = 7,6 przy częstotliwości f = 50 Hz dla liczby par
biegunów p = 2 silnika AC. Z tego powodu zmiana częstotliwości z 50 Hz do 25 Hz pozwala
zmniejszyć o połowę jego obroty. W praktyce zakres roboczych zmian częstotliwości
i obrotów zależy od zastosowań silnika oraz specyfiki obciążeń mechanicznych napędzanego
urządzenia.
Wniosek:
Możemy zmieniać prędkość obrotową silnika indukcyjnego zachowując stałość momentu
napędowego jeśli zasilimy ten silnik ze źródła mogącego zmieniać
częstotliwość „f” ale zawsze proporcjonalnie do wartości skutecznej napięcia „U”.
Przykładowo, jeśli silnik w znamionowych warunkach wymaga zasilenia napięciem
3 × 400 V/50 Hz i jego znamionowa prędkość obrotowa obroty wyniesie wówczas, na
przykład 1460 l/min to stosunek U/f = 400 V/50 Hz = 8 V/Hz. Jeśli teraz chcielibyśmy
zmniejszyć prędkość obrotową pięciokrotnie, to: pięciokrotnie musi zostać zmniejszona
częstotliwość oraz, pięciokrotnie zmniejszona wartość skuteczna napięcia.
Dobór silnika elektrycznego do konkretnych zastosowań wymaga znajomości zarówno
charakterystyk silnika jak i odbiornika mocy (warunki pracy, typ i zakres obciążeń).
Zasadnicze formy obciążeń maszyn i urządzeń ze względu na żądany przebieg momentu
obrotowego M(n) oraz mocy na wale P(n) w funkcji prędkości obrotowej n to:
– stała moc: P = const., zaś odwrotna proporcjonalność momentu: M ~ 1/n
(ten przypadek obejmuje np. nawijarki bębnowe),
– stały moment obrotowy: M = const, oraz liniowa zależność mocy: N ~ n,
(np. napęd pompy tłokowej, mieszarki, przenośnika taśmowego),
– liniowa charakterystyka momentu obrotowego: M ~ n, oraz kwadratowa mocy:
P ~ n
2
, (np. obrabiarki i narzędzia, napęd trakcyjny),
– kwadratowa zależność momentu obrotowego: M ~ n
2
, oraz sześcienna mocy:
P ~ n
3
, (np. odśrodkowe pompy wirowe, sprężarki, dmuchawy, wentylatory).
Przetwornice częstotliwości - budowa i działanie
Obecnie jako źródła zasilania o regulowanej częstotliwości stosuje się
energoelektroniczne przemienniki częstotliwości. Rozwój półprzewodnikowych elementów
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
mocy oraz cyfrowych układów sterowania pozwala na konstrukcję przemienników
częstotliwości o dobrych parametrach regulacyjnych i eksploatacyjnych.
Pod względem budowy przemienniki częstotliwości można podzielić na:
a) bezpośrednie (cyklokonwertory),
b) pośrednie:
− z regulowanym prądem obwodu pośredniego i falownikiem prądu,
− z regulowanym napięciem obwodu pośredniego i falownikiem napięcia,
− ze stałą wartością prądu obwodu pośredniego i falownikiem prądu z modulacją szerokości
impulsów,
− ze stałą wartością napięcia obwodu pośredniego i falownikiem napięcia z modulacją
szerokości impulsów.
Najczęściej stosowane w układach przemysłowych są przemienniki częstotliwości ze
stałą wartością napięcia obwodu pośredniego i falownikiem napięcia z modulacją szerokości
impulsów MSI (PWM z ang. Pulse Width Modulation). Nazywane są one popularnie
falownikami, nazwa ta nie jest jednak dokładna, ponieważ falownik stanowi tylko jeden
z elementów przetwornicy częstotliwości. Rysunek poniżej przedstawia schemat takiego
przekształtnika.
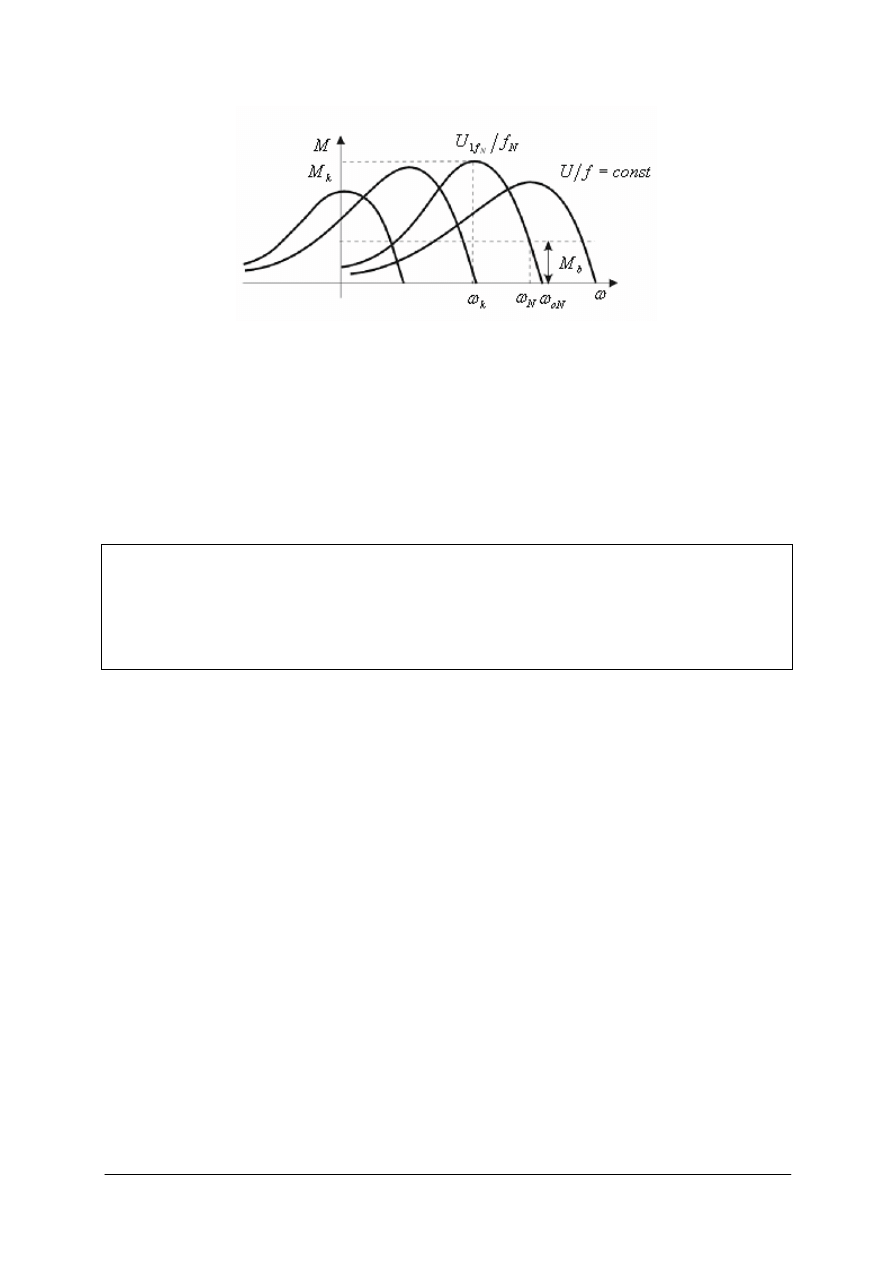
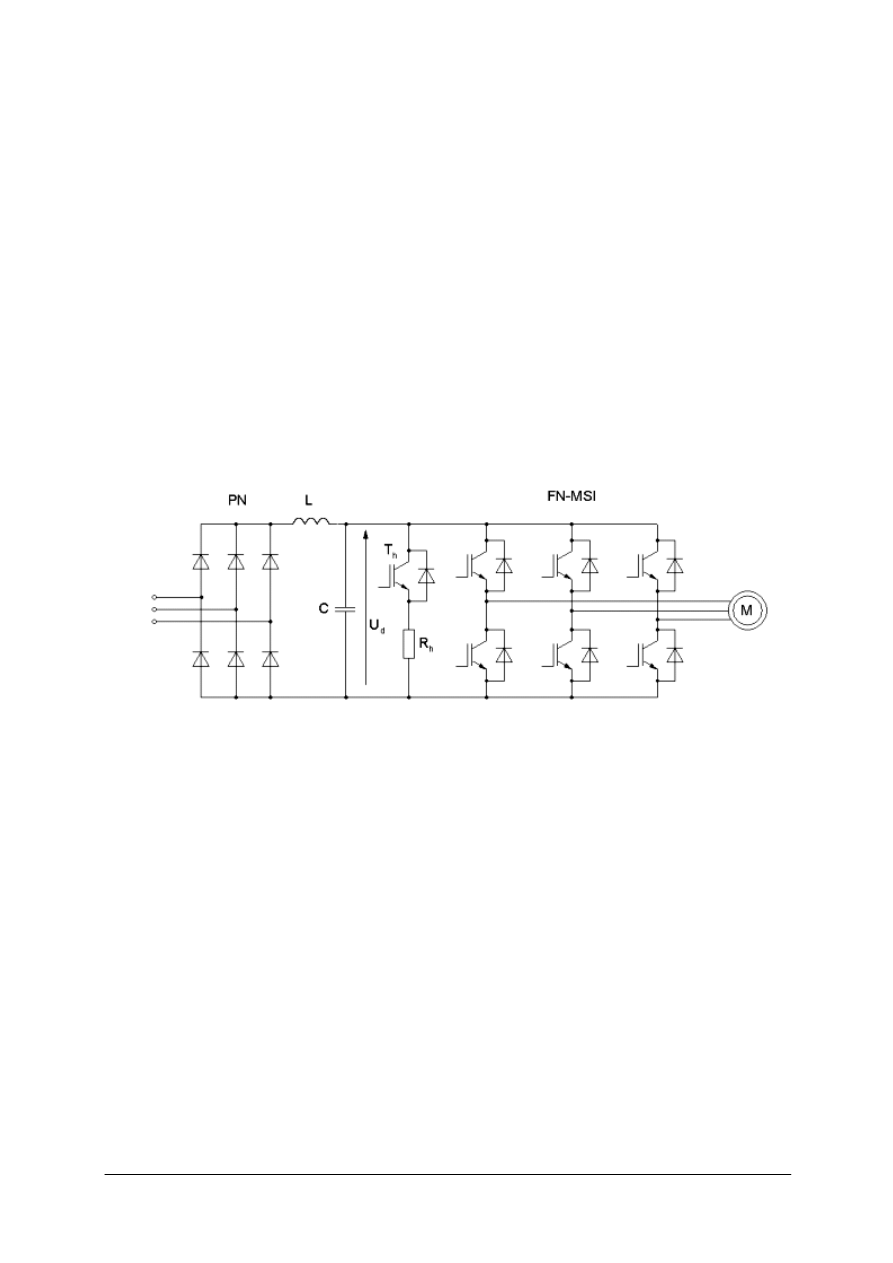
Rys. 15. Przykładowy schemat przemiennika częstotliwości [3]
PN-prostownik niesterowany, FN-MSI – falownik napięcia modulacją szerokości impulsów
Przetwornice częstotliwości w rozwiązaniach praktycznych mogą dość istotnie się różnić.
Główne układy elektryczne przetwornicy częstotliwości tworzą:
Prostownik – przekształca on na wejściu do układu 3-fazowe napięcie z sieci AC na
pulsujące napięcie stałe DC. Jest to mostek 3-fazowy, który składa się z sześciu
elementów półprzewodnikowych (diodowy – jeśli nie jest sterowany, diodowo-
tyrystorowy lub tyrystorowy, gdy sterowany),
Stopień pośredni – w którym przekształcane jest pulsujące napięcie stałe (o stałej lub
regulowanej wartości). Do tego celu stosowane są układy stałoprądowe,
stałonapięciowe (układ LC złożony z cewki i kondensatora), bądź tzw. „czopery”
(przerywniki impulsowe zaopatrzone w tranzystory mocy). Układ ten zasila inwerter
mocy i spełnia jednocześnie funkcję akumulatora energii elektrycznej,
Inwerter mocy – stanowi końcowy układ przetwornicy, w którym w wyniku syntezy
uzyskuje się na wyjściu 3-fazowe napięcia zmienne AC o regulowanej wartości oraz
zmiennej częstotliwości niezbędne do zasilania silnika (zwykle przy U/f = const.).
Inwertery mocy nowej generacji posiadają połączone parami w bloki tranzystory
z izolowaną bramką (IGBT). Zapewniają one niski poziom strat oraz szeroki zakres
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
regulacji częstotliwości prądu. Ponieważ układ ten jest połączony przewodami
bezpośrednio z silnikiem elektrycznym, dlatego żargonowo używany termin
„inwerter” określa cały zespół regulacyjny przetwornicy częstotliwości
.
Przetwornice zależnie od potrzeb i dostosowanych do nich rozwiązań kształtują przebiegi
napięć wyjściowych w różny sposób, stąd występują przetwornice:
– ze źródłem prądowym,
– z modulacją amplitudy,
– z modulacją szerokości impulsów.
Kryteria doboru
(materiał opracowany na podstawie przetwornic częstotliwości DV6)
Doboru przetwornicy częstotliwości dokonuje się na podstawie prądu znamionowego
silnika. To znaczy, że prąd wyjściowy przetwornicy musi być większy lub równy prądowi
znamionowemu silnika. Przede wszystkim muszą być znane następujące dane napędu:
– rodzaj silnika (silnik asynchroniczny),
– napięcie sieci równe napięciu znamionowemu. silnika, na przykład 400 V,
– prąd znamionowy silnika (wartość zalecana, zależnie od rodzaju przyłącza i napięcia
sieci),
– moment obciążenia,
– temperatura otoczenia.
Rys. 16. Schemat funkcjonalny przetwornicy częstotliwości [8]
Zasilanie przez filtr przeciwzakłóceniowy. Napięcie sieci 3 AC 400 V, 50/60 Hz.
Mostek prostowniczy przetwarza napięcie przemienne sieci elektrycznej na napięcie stałe.
Obwód napięcia stałego pośredniego zawiera opornik ładowania, kondensatory wygładzające
oraz układ przełączania sieci. Umożliwia on sprzężenie obwodu pośredniego i zasilanie
napięciem stałym.
Falownik IGBT – falownik przetwarza napięcie stałe z obwodu pośredniego na trójfazowe
napięcie przemienne o zmiennej częstotliwości. Tranzystor hamujący umożliwia
hamowanie silnika przy dużym momencie bezwładności lub długotrwałej pracy
generatorowej przez włączenie zewnętrznego opornika hamowania.
Napięcie wyjściowe: trójfazowe napięcie przemienne, ustawialne w zakresie 0 do 100%
napięcia wejściowego. Częstotliwość wyjściowa: 0,5 do 400 Hz
Znamionowy prąd wyjściowy: 2,5 do 253 A z około 1,5-krotnym prądem rozruchowym przez
60 s przy częstotliwości przełączania 5 kHz i temperaturze otoczenia 40
° C.
Przyłącze silnika, moc na wale 0,75 do 132 kW przy 400 V.
Programowany moduł sterowania z panelem obsługi i przyłączem interfejsu.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
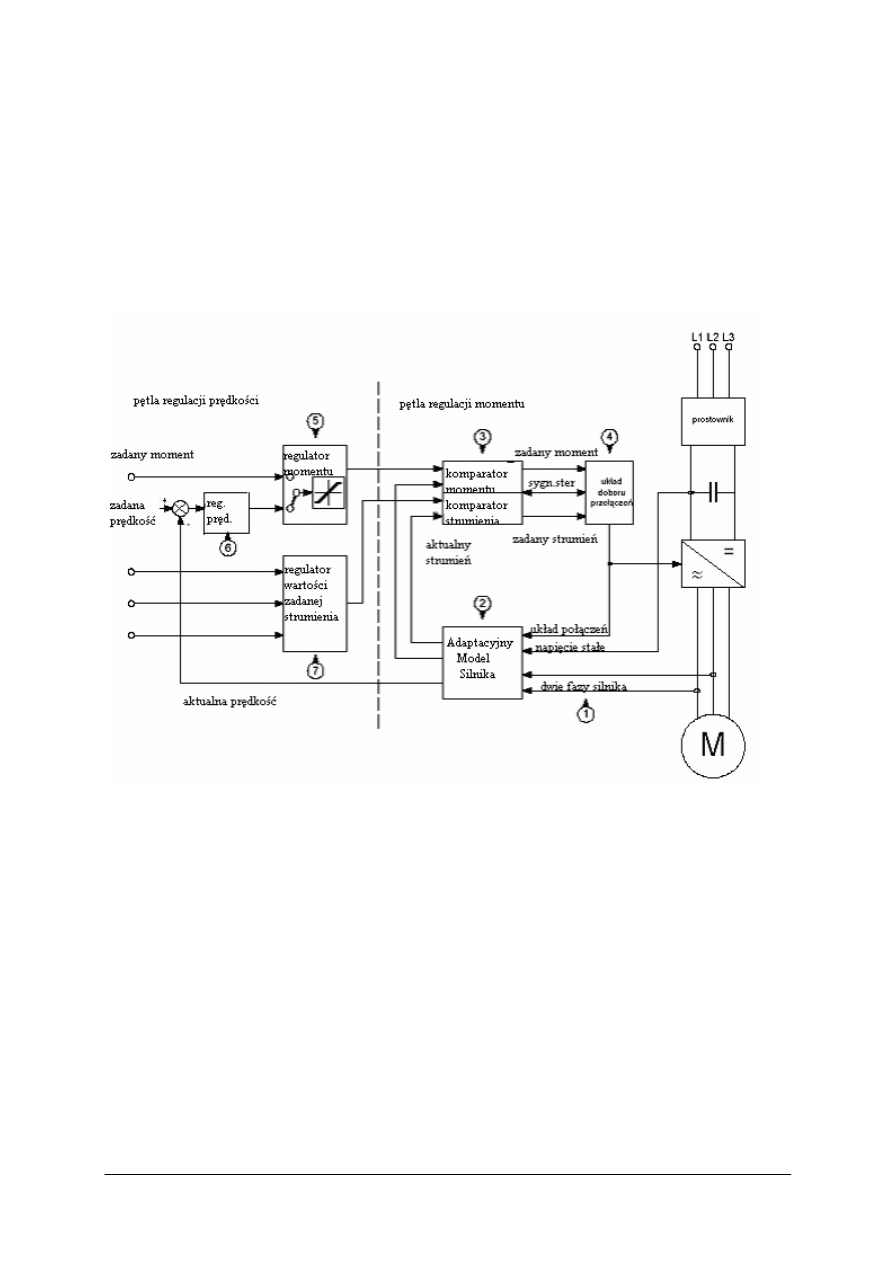
Metody bezpośredniego sterowania momentem elektromagnetycznym i strumieniem
magnetycznym
Zasada działania bezpośredniego sterowania momentu elektromagnetycznego
i strumienia może zostać sprowadzona do wyznaczenia sposobu generacji odpowiednich
sygnałów sterujących przełączaniem poszczególnych zaworów energoelektronicznych
w falowniku napięciowym. W metodzie bezpośredniego sterowania silnikiem przełączenia
zaworów energoelektronicznych falownika następują w zależności od aktualnego stanu
elektromagnetycznego układu napędowego.
Rys. 17. Schemat blokowy układu [5]
Opis i działanie bloków
1 – Pomiar napięcia i prądu
Wykonywane są pomiary prądu w 2 fazach silnika (przy braku przewodu neutralnego na
ich podstawie można wyznaczyć prąd trzeciej fazy) i napięcia stałego obwodu
pośredniczącego oraz określane są aktualne pozycje kluczy falownika.
2 – Adaptacyjny Model Silnika
Zmierzone wartości (p. #1) są dostarczane do adaptacyjnego Modelu Silnika. Do Modelu
Silnika dostarczane są także informacje o silniku zbierane podczas biegu
uruchomieniowego. Jest to tzw. bieg identyfikacyjny i wyznacza takie parametry silnika
jak: rezystancja stojana (
S
R ), indukcyjność wzajemna (
m
L ), współczynnik nasycenia
oraz moment bezwładności silnika (J).
3 – Komparator momentu i komparator strumienia
Komparatory momentu i strumienia sterują położeniem kluczy falownika.
4 – Układ doboru przełączeń
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
Klucze falownika są sterowane tak, aby osiągnąć lub utrzymać określoną wartość
momentu silnika.
5 – Regulator sygnału zadanego momentu
Wartość sygnału wyjściowego regulatora zadanego momentu zależy od nastawionych
ograniczeń tego regulatora i wartości napięcia obwodu pośredniczącego.
Sygnałem wejściowym jest sygnał z regulatora prędkości albo zewnętrzny sygnał zadany
momentu. Sygnał wyjściowy tego bloku jest podawany na komparator momentu.
6 – Regulator prędkości
Regulator prędkości zawiera regulator PID i kompensator przyspieszenia.
Rys. 18. Schemat układu napędowego [5]
Kaskadowe układy napędowe
Kaskadowe układy napędowe stosowane są do regulacji prędkości obrotowej
indukcyjnych silników pierścieniowych średnich i dużych mocy o napięciu stojana od 0,4 kV
do 6 kV.
Układy te są szczególnie preferowane do napędów pomp i wentylatorów.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
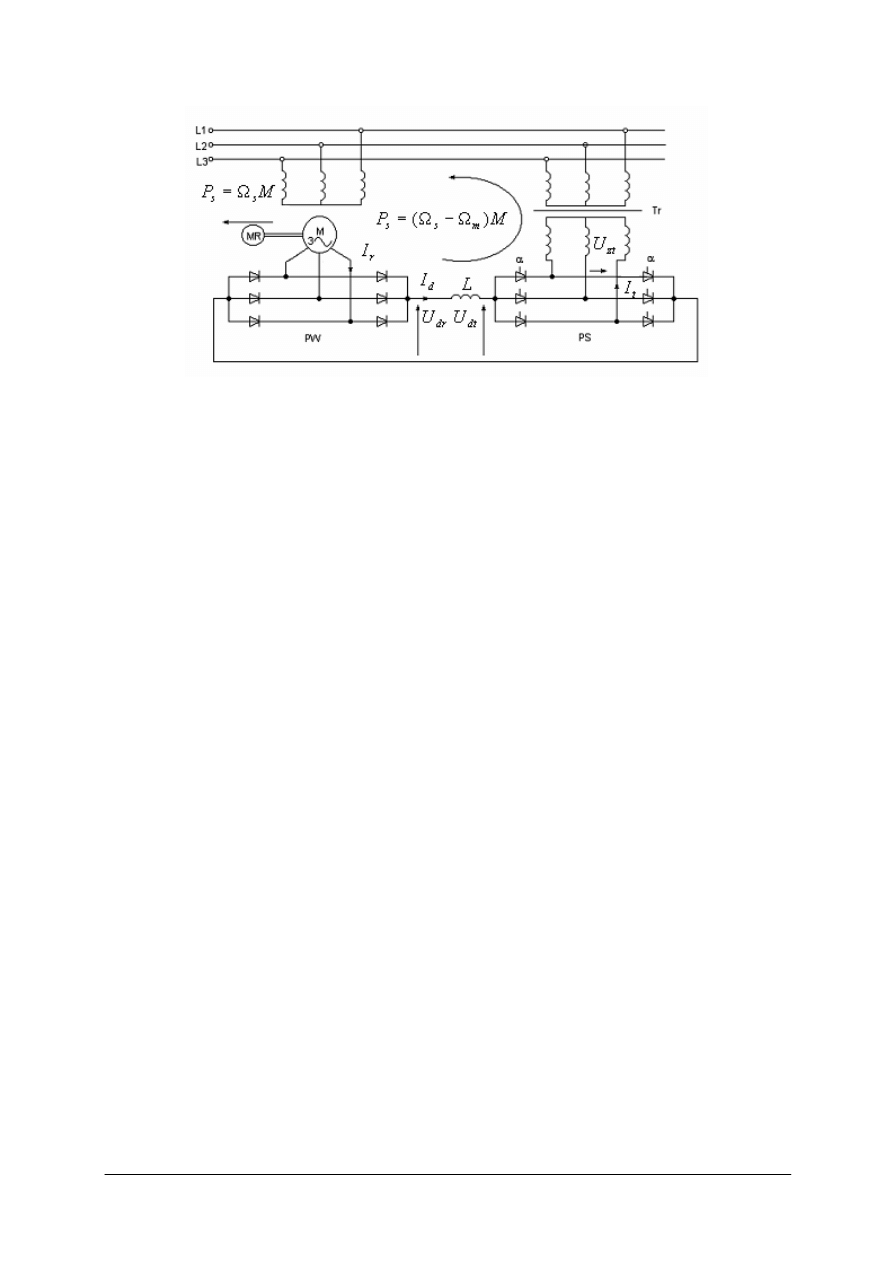
Rys. 19. Schemat układu kaskadowego [5]
Napięcie dodatkowe U
d
w układzie kaskady M = const. oznaczone przez U
dr
uzyskujemy
z przekształtnika PS – wysterowanego do pracy falowniczej. Transformator Tr dopasowuje
napięcie strony wtórnej U
2t
do wartości napięcia U
r
obwodu wirnika. Moc poślizgu
S
P
Δ
przez prostownik PW, pośredni obwód prądu stałego, przekształtnik PS i transformator
przekazywana jest do sieci zasilającej układ.
Korzyści wynikające z zastosowania układów kaskadowych:
Regulacja prędkości obrotowej silników pierścieniowych o wysokich napięciach stojana.
Oszczędność energii elektrycznej.
Automatyzacja procesów technologicznych.
Łagodny i automatyczny rozruch silnika.
Oszczędność wody, przy regulacji prędkości obrotowej pomp.
Stabilizacja ciśnienia lub przepływu.
Zmniejszenie zużycia pomp, zaworów, zasuw, rur.
Dzięki odzyskiwaniu tzw. mocy poślizgu z obwodu wirnika i przekazywaniu jej do
obwodu stojana silnika, możliwa jest regulacja prędkości obrotowej przy zachowaniu
wysokiej sprawności całego napędu. Układy kaskadowe są wyposażone w wewnętrzny
oporowy układ rozruchowy oraz stycznik umożliwiający przejście do pracy ze zwartym
wirnikiem
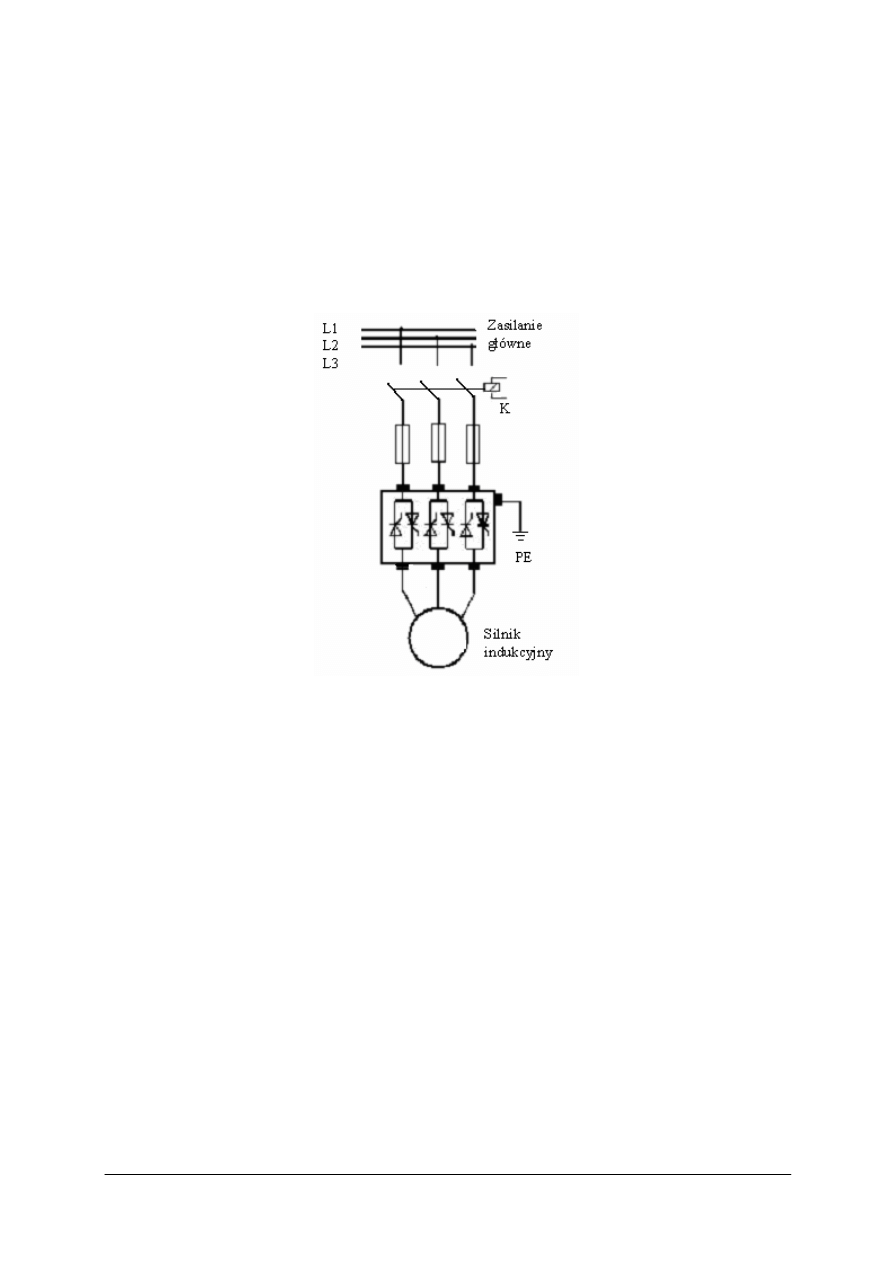
Rozruch silnika asynchronicznego
Szybki w ostatnich latach rozwój energoelektroniki spowodował powstanie urządzeń do
łagodnego rozruchu silników indukcyjnych, nazywane układami „soft-start” (miękkiego
rozruchu). Ich zasada działania opiera się na regulacji mocy dostarczanej do odbiornika,
dokonywanej poprzez zmianę skutecznej wartości napięcia podawanego na odbiór. W roli
elementów sterujących stosuje się najczęściej tyrystory. Możliwe jest dzięki temu dokładne
sterowanie procesem rozruchu silnika z jednoczesnym śledzeniem szeregu parametrów, jak
prąd rozruchowy, moment silnika, prędkość obrotowa. Dzięki wykorzystaniu tych urządzeń
znacznie redukuje się prąd rozruchu oraz udary mechaniczne silników, ich wałów
i negatywny wpływ tych procesów na urządzenia.
Przy wykorzystaniu układów typu
SOFTSTART znacznie redukuje się prąd rozruchu oraz udary mechaniczne silników, jego
wału (wirnika), skrzyń biegów oraz pasów przenoszących napęd. Żywotność urządzeń
mechanicznych jest dzięki temu znacznie przedłużona.
Podstawowe cechy softstartu to:
łatwe nastawianie: momentu początkowego, czasu rozruchu i zatrzymania,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
przełączanie na zestyki konwencjonalne w stanie ustalonym,
zintegrowany radiator i wewnętrzny „bypass”,
autozabezpieczenie temperaturowe.
Obecnie na naszym rynku spotykamy softstarty cyfrowe i analogowe. Softstarty cyfrowe
mają wszystkie nastawy zmieniane poprzez pulpit operatorski a analogowe poprzez
przełączniki i potencjometry. Podstawowe funkcje i nastawy to: czas rozruchu, czas
hamowania, wielkość prądu rozruchowego, oszczędzanie energii, podwyższenie momentu
rozruchowego, charakterystyka pompowa, drugi czas rozruchu, praca na małej prędkości.
Rys. 20. Schemat poglądowy układu „łagodnego rozruchu” [8]
Dane techniczne przykładowych układów softstartów:
Zasilanie (L1, L2, L3):
Napięcie zasilania 200
÷ 240 V: 3 x 200/208/220/230/240 V +/-10%
Napięcie zasilania 380
÷ 500 V: 3 x 380/400/415/440/460/500 V +/-10%
Częstotliwość zasilania: 50/60 Hz
Maksymalna asymetria napięcia zasilania:
VLT5001- 5011/ 380
÷ 500 V: +/-2.0% znamionowego napięcia zasilania
VLT5016- 5062/ 380
÷ 500 V: +/-1.5% znamionowego napięcia zasilania
VLT5072- 5500/ 380
÷ 500 V: +/-3.0% znamionowego napięcia zasilania
Współczynnik mocy / cos. fi: 0.90/1.0 przy znamionowym obciążeniu
Ilość przełączeń na wejściu zasilania L1, L2, L3: około 1 raz / min.
Maksymalny prąd zwarciowy: 100000 A
Dane wyjścia VLT (U, V, W):
Napięcie wyjściowe: 0
÷ 100% napięcia zasilającego
Częstotliwość wyjściowa: 0
÷ 132 Hz, 0–1000 Hz
Znamionowe napięcie silnika, wersje 200
÷ 240V: 200/208/220/230/240 V
Znamionowe napięcie silnika, wersje 380
÷ 500V: 380/400/415/440/460/480/500 V

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
Znamionowa częstotliwość silnika: 50/60 Hz
Przełączanie na wyjściu: nieograniczone
Czasy narastania: 0,05 ÷ 3600 s
Charakterystyki momentów:
Moment rozruchowy, VLT 5001-5027, 200 ÷ 240 V: 160% przez 1 min.
Moment rozruchowy, VLT 5001-5102, 380 ÷ 500 V: 160% przez 1 min.
Moment rozruchowy, VLT 5125-5500, 380 ÷ 500 V: 150% przez 1 min.
Moment rozruchowy: 180% przez 0,5 s
Moment przyspieszenia: 100%
Moment przeciążenia, VLT 5001-5027, 200
÷ 240 V: 160%
Moment przeciążenia, VLT 5001-5102, 380
÷ 500 V: 160%
Moment przeciążenia, VLT 5125-5500, 380
÷ 500 V: 150%
Moment zatrzymania przy 0 obr/min (pętla zamknięta): 100%
Charakterystyki momentów podano dla przetwornic częstotliwości VLT pracujących w trybie
wysokiego poziomu momentu przeciążenia (160 %). Przy normalnym momencie przeciążenia
(110 %) wartości są mniejsze.
Karta sterująca, wejścia cyfrowe:
Ilość programowalnych wejść cyfrowych: 8
Poziom napięcia: (0
÷ 24 V DC - logika dodatnia pnp)
Poziom napięcia, logiczne "0": < 5 V DC
Poziom napięcia, logiczna "1": > 10 V DC
Maksymalne napięcie na wejściu: 28 V DC
Rezystancja wejściowa, Ri: około 2 k
Ω
Czas skanowania (na wejście): 3 ms
Izolacja galwaniczna: Wszystkie wejścia cyfrowe są galwanicznie izolowane od napięcia
zasilającego (PELV).
Dodatkowo: wejścia cyfrowe mogą być izolowane od innych zacisków karty sterującej przez
podłączenie zewnętrznego napięcia zasilającego 24 V DC i rozwarcie złącza 4.
Karta sterująca, wejścia analogowe:
Ilość programowalnych, napięciowych wejść analogowych: 2
Poziom napięć: 0
÷ 24 V DC (skalowalne)
Rezystancja wejściowa, Ri: około 10 k
Ω .
Ilość programowalnych, prądowych wejść analogowych: 1
Poziom prądów: 0/4 - ±20 mA (skalowalne)
Rezystancja wejściowa, Ri: około 200
Ω
Rozdzielczość: 10 bitów + znak
Dokładność na wejście: Max. błąd 1% pełnego zakresu
Czas skanowania (na wejście): 3 ms.
Izolacja galwaniczna: Wszystkie wejścia analogowe są galwanicznie izolowane od napięcia
zasilającego (PELV), jak również innych wejść i wyjść.
4.3.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie są zadania układu napędowego prądu przemiennego?
2. Jakie są metody regulacji prędkości obrotowej silników asynchronicznych?
3. Na czym polega rozruch łagodny silnika asynchronicznego?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
4. Od czego zależy moment silnika indukcyjnego?
5. Jakie warunki muszą być spełnione przy regulacji prędkości poprzez zmianę
częstotliwości?
6. Jakie podstawowe zasady bezpieczeństwa obowiązują na stanowisku pracy z układem
napędowym?
4.3.3. Ćwiczenia
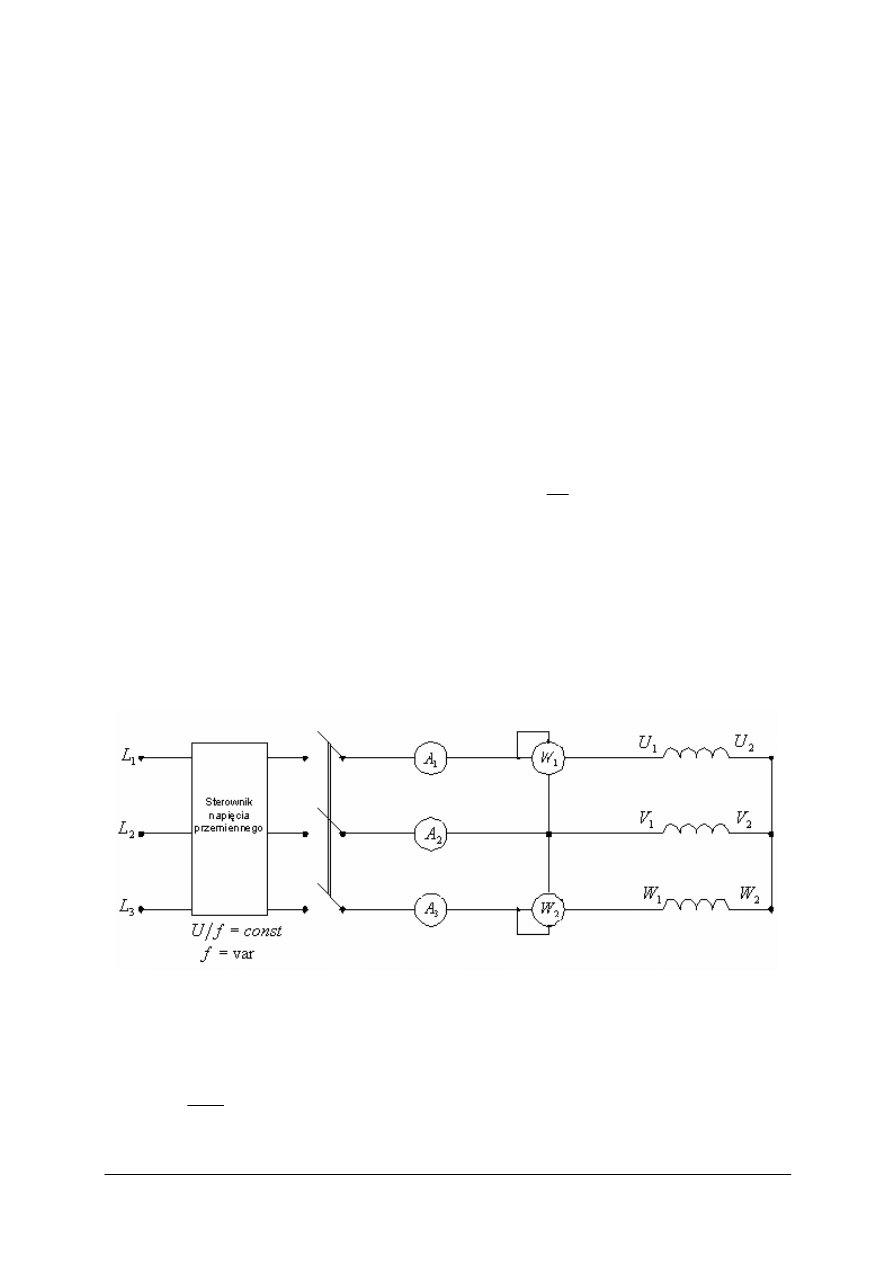
Ćwiczenie 1
Zbadaj silnik indukcyjny klatkowy z przemiennikiem częstotliwości.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
połączyć układ pomiarowy zgodnie ze schematem,
2)
dobrać sprzęt pomiarowy,
3)
zmierzyć wartości prędkości obrotowej, prądów oraz mocy przy różnych
częstotliwościach napięcia zasilającego i stałej wartości
1
1
f
U
,
4) zmienić wartość obciążenia silnika i pomiary powtórzyć,
5) wyznaczyć charakterystyki ruchowe silnika przy dwóch częstotliwościach zasilania
różnych od znamionowej w funkcji momentu obciążenia na wale silnika,
6) zapisać wyniki w tabeli pomiarowej,
7) obliczyć pozostałe wartości charakteryzujące układ napędowy,
8) wykreślić charakterystyki
η
, P, I, cos
ϕ
, n = f(M),
9) wyciągnąć wnioski z pomiarów.
Schemat układu pomiarowego
Wzory do obliczeń:
3
1
P
P
P
+
=
moc elektryczna
1000
r
g
m
M
⋅
⋅
=
moment użyteczny
g – przyspieszenie ziemskie
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
m – masa ciężarka
UI
P
3
cos
=
ϕ
współczynnik mocy
%
100
P
P
m
=
η
sprawność
M
n
M
P
m
60
2
π
ω
=
=
moc użyteczna
Tabela pomiarowa
Tabela pomiarowa
Wyposażenie stanowiska pracy:
– silnik indukcyjny,
– sterownik napięcia przemiennego,
– watomierze,
– amperomierze,
– miernik prędkości obrotowej,
– regulowane obciążenie wału silnika,
– kartki papieru,
– długopis, ołówek, linijka, zestaw krzywików,
– papier milimetrowy,
– kalkulator prosty.
Z pomiarów
Z obliczeń
f n U
I
R
I
s
I
T
P
RS
P
TS
P
cos
ϕ
P
m
η
Lp.
Hz obr./min V A A A W W W – W %
Z pomiarów
Z obliczeń
U n M
I
R
I
s
I
T
P
RS
P
TS
P
cos
ϕ
P
m
η
Lp.
V obr./min
Nm A A A W W W – W %

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
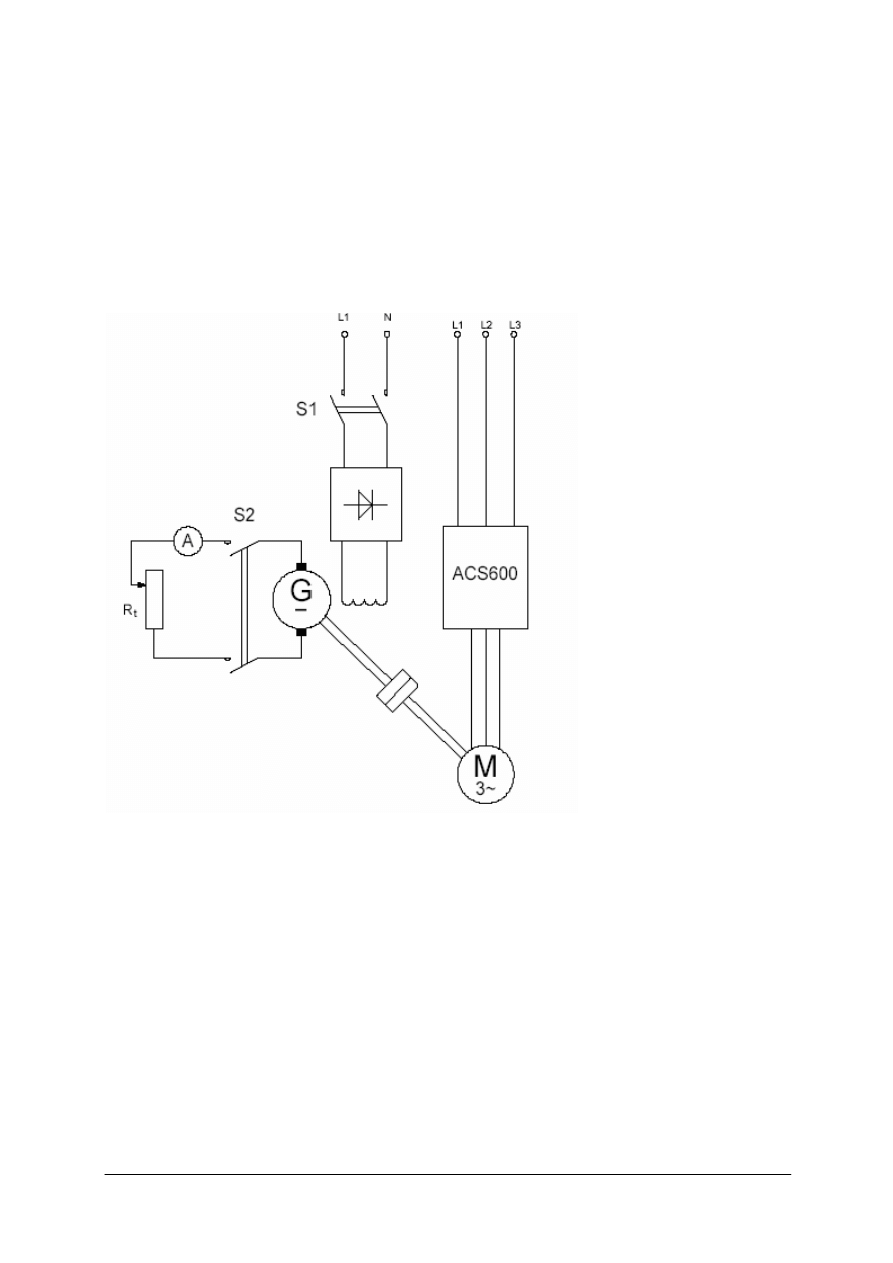
Ćwiczenie 2
Zbadaj układ napędowy silnika klatkowego z bezpośrednią regulacją momentu.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) sprawdzić połączenia układu i narysować schemat układu ACS600,
2) zapoznać się z działaniem i obsługą przemiennika ACS600,
3) zapoznać się z działaniem i obsługą programu ABB DRIVE,
4) dla układu sterowania DTC z falownikiem ACS600:
– wprowadzić dane wejściowe i przeprowadzić bieg identyfikacyjny silnika,
– zbadać działanie układu przy obciążeniu silnika, zmienić wartość ograniczenia
momentu,
– przeprowadzić nawrót silnika,
– przeprowadzić regulację czasów przyspieszania i hamowania oraz wyboru krzywej
przyspieszania/hamowania,
– wykonać skok momentu obciążenia przez załączenie obwodu twornika prądnicy prądu
stałego (obciążenie),
– dokonać zmian nastaw regulatora prędkości i zaobserwować zachowanie silnika
podczas zmian prędkości zadanej, na przykład rozruch, nawrót,
– po porównaniu wpływu nastaw regulatora prędkości na przebieg prędkości
przeprowadzić samodostrojenie regulatora prędkości,
– zastosować funkcję nadzoru prędkości krytycznych,
– przeprowadzić obserwację i rejestrację przebiegu prądu wyjściowego przekształtnika
wykorzystując czujnik LEM,
– woltomierzem elektromagnetycznym zmierzyć napięcie międzyfazowe na wyjściu
przekształtnika przy silniku obracającym się ze znamionową prędkością obrotową,
5) wykorzystując program symulacyjny obejrzeć przebiegi prądów, momentu i innych
zmiennych wewnętrznych silnika w charakterystycznych punktach pracy (rozruch,
nawrót, zmiana prędkości, zmiana strumienia, zmiana momentu obciążenia).
Wyposażenie stanowiska pracy:
– silnik indukcyjny,
– sterownik napięcia przemiennego,
– watomierze,
– amperomierze,
– miernik prędkości obrotowej,
– regulowane obciążenie wału silnika,
– kartki papieru,
– długopis, ołówek, linijka, zestaw krzywików,
– papier milimetrowy,
– kalkulator prosty.
Ćwiczenie 3
Zbadaj rozruch układu napędowego silnika indukcyjnego z urządzeniem do łagodnego
rozruchu (softstart).

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z dokumentacją techniczno-ruchową zastosowanego urządzenia,
2) dobrać nastawy i zabezpieczenia do silnika, którego rozruch masz przeprowadzić,
3) zaprogramować urządzenie zgodnie z wymogami napędu dla danego silnika,
4) przeprowadzić rozruch, kontrolując prąd pobierany przez silnik i jego prędkość
obrotową,
5) pomiary zanotować w tabeli,
6) wyciągnąć wnioski.
Wyposażenie stanowiska pracy:
– urządzenie do łagodnego rozruchu (softstart),
– silnik indukcyjny,
– amperomierze,
– miernik prędkości obrotowej,
– długopis,
– kartki papieru.
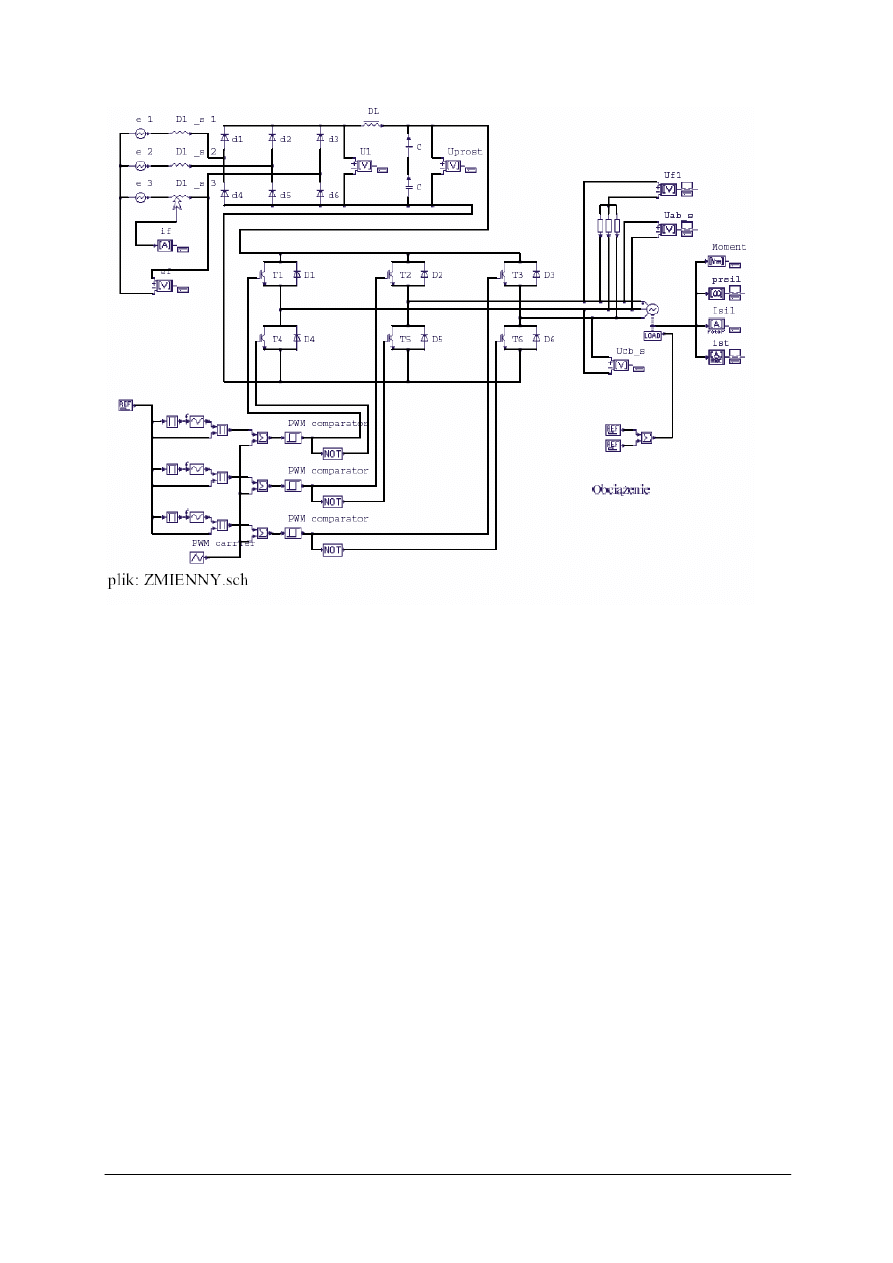
Ćwiczenie 4
Zbadaj w oparciu o program TCAD układ napędowy z silnikiem asynchronicznym
klatkowym sterowanym według zasady U/f = const.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z obsługą programu,
2) zapoznać się z topologią i parametrami badanego układu (plik ZMIENNY.sch),
3) zarejestrować przebiegi (prąd stojana, wirnika, moment i prędkość kątowa) przy rozruchu
silnika do zadanych prędkości w zadanych warunkach obciążenia maszyny,
4) określić parametry rozruchu,
5) zarejestrować przebiegi przy skokowym obciążeniu i odciążeniu maszyny, określić
parametry procesu przejściowego,
6) zarejestrować przebiegi: prądu i napięcia stojana, prądu wirnika, napięcia na
kondensatorze pośredniczącym oraz prądu i napięcia zasilania przekształtnika w stanie
ustalonym napędu,
7) zarejestrować przebiegi przy zmniejszaniu prędkości silnika, zbadać wpływ obciążenia
na przebieg hamowania.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
Schemat układu pomiarowego w programie symulacyjnym
Wyposażenie stanowiska pracy:
– komputer z oprogramowaniem,
– drukarka,
– kalkulator,
– kartki papieru,
– długopis.
4.3.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) wymienić zadania układu napędowego prądu przemiennego?
2) omówić metody regulacji prędkości silnika asynchronicznego?
3) wyjaśnić istotę pracy rozrusznika energoelektronicznego?
4) omówić sterowanie prędkością kątową silnika w kaskadzie
przekształtnika?
5) dobrać przyrządy pomiarowe do wyznaczania charakterystyki
mechanicznej silnika asynchronicznego?
6) dobrać nastawy i zabezpieczenia do silnika?
7) przeprowadzić rozruch układu napędowego silnika indukcyjnego
z urządzeniem do łagodnego rozruchu (softstart) ?
8) zmierzyć wartości prędkości obrotowej?
9) zmierzyć wartości prądów oraz mocy silnika?
10) obliczyć wartości charakteryzujące układ napędowy?
11) wykreślić charakterystyki
η
, P, I, cos
ϕ
, n = f(M) ?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
5. SPRAWDZIAN OSIĄGNIĘĆ
TEST 1
INSTRUKCJA DLA UCZNIA
Przystępujesz do wykonania zadania, sprawdzającego w jakim stopniu opanowałeś
wiadomości i jakie posiadasz umiejętności z działu „Układy napędowe z silnikami prądu
stałego”.
Wynik tego testu pozwoli ci stwierdzić, jakie jeszcze masz braki w danej dziedzinie, czyli
nad czym jeszcze musisz popracować.
Przystępując do rozwiązania podanego zadania:
1. Przeczytaj uważnie instrukcję – masz na tę czynność 5 minut: Jeżeli są wątpliwości zapytaj
nauczyciela.
2. Zapoznaj się z zestawem zadań testowych.
3. Na rozwiązanie zadań masz 90 minut.
4. W czasie rozwiązywania zadań możesz korzystać z katalogów.
5. Test zawiera 10 zadań. Zadania od nr 1 do 6 wykonujesz według podanej kolejności.
6. Jeśli nie potrafiłbyś wykonać zadań od 7 do 9 przejdź do rozwiązywania zadania 10.
7. Przeliczenie punktów na ocenę szkolną:
− niedostateczny
– 0÷5 pkt
− dopuszczający – 6÷9 pkt
− dostateczny – 10÷13 pkt
− dobry
– 14÷17 pkt
− bardzo dobry – 18÷20 pkt
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
45
ZESTAW ZADAŃ TESTOWYCH
Zadanie 1. (1 punkt)
Podaj definicje i wzory:
– kąta załączenia tyrystora
z
ϑ
,
– kąta przewodzenia tyrystora
λ
– sprawności układu napędowego
η
Zadanie 2. (2 punkty)
Zbuduj układ do wyznaczania charakterystyki zewnętrznej prostownika
Zadanie 3. (2 punkty)
Zmierz wielkości potrzebne do wyznaczenia tej charakterystyki przy różnych wartościach
napięcia zadanego (
.
const
u
Z
=
i
.
const
Z
=
α
).
Wartości zapisz w tabeli.
Zadanie 4. (2 punkty)
Na podstawie pomiarów narysuj charakterystyki
)
(
d
d
I
f
U
=
.
Zadanie 5. (2 punkty)
Narysuj przebiegi napięcia i prądu na wyjściu prostownika przy różnych kątach załączenia
tyrystorów (za pomocą oscyloskopu katodowego), .
Zadanie 6. (2 punkty)
Zbuduj układ do pomiaru charakterystyki mechanicznej silnika dla kilku różnych wartości
napięcia zadającego
.
const
u
Z
=
i
.
const
Z
=
α
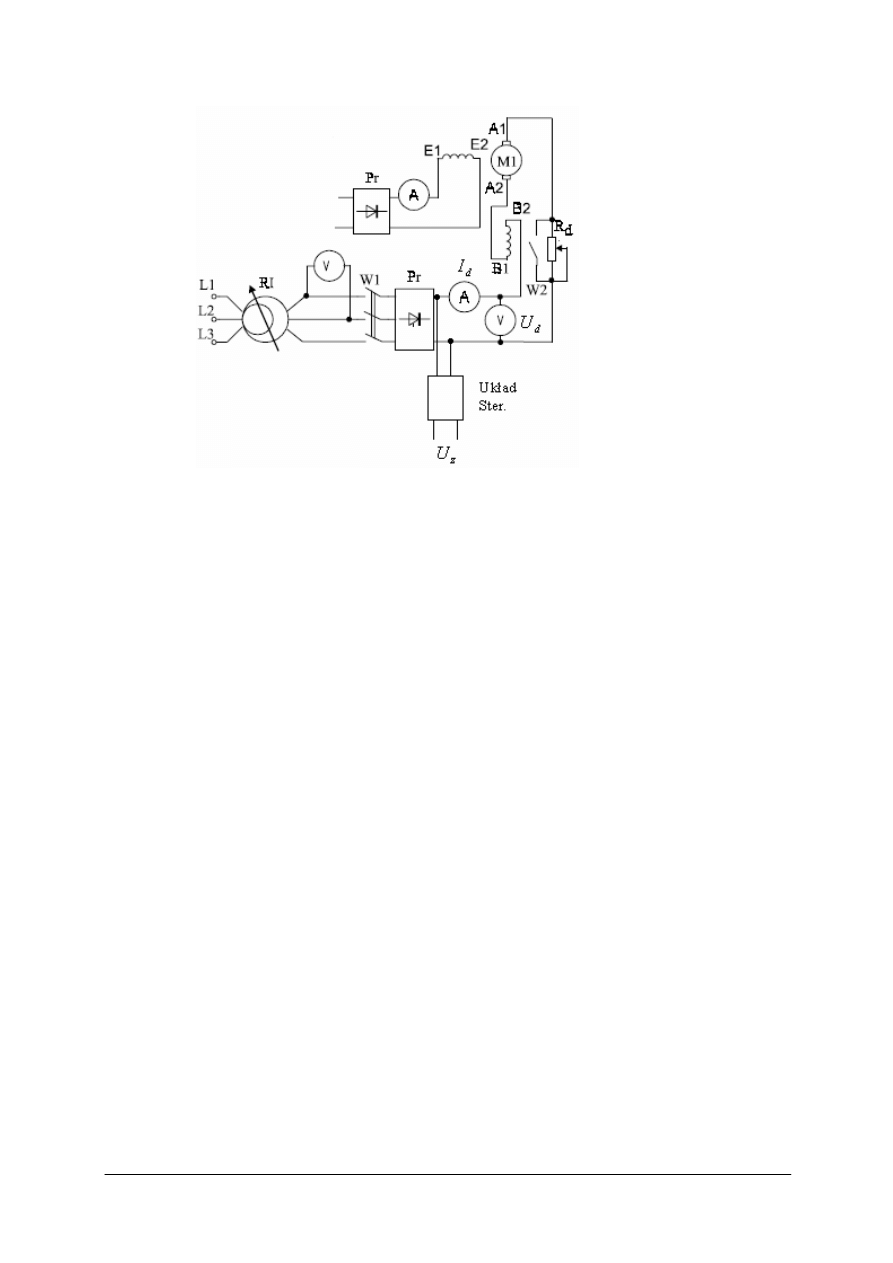
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
46
Zadanie 7. (2 punkty)
Zmodyfikuj układ napędowy stosując zamknięty obwód sprzężenia napięciowego.
Zadanie 8. (3 punkty)
Zmierz wielkości potrzebne do wyznaczenia tej charakterystyki w zmodyfikowanym układzie
przy różnych wartościach napięcia zadanego (
.
const
u
Z
=
i
.
const
Z
=
α
).
Wartości zapisz w tabeli.
Sprawdź poprawność modyfikacji.
Zadanie 9. (2 punkty)
Zanalizuj pracę układu na podstawie uzyskanych wyników pomiarów.
Zadanie 10. (2punkty)
Na podstawie wykonanych pomiarów i obliczeń sporządź sprawozdanie

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
47
6. LITERATURA
1. ACS/ACC/ACP 601 Frequency Converters 2.2 to 110 kW – Installation & Start-
upManual. ABB Industry Oy, 1998
2. Barlik R., Nowak M.: Technika tyrystorowa WNT, Warszawa 1988
3. Dębowski A.: Sposoby sterowania momentem w nowoczesnym napędzie elektrycznym.
Artykuł z seminarium towarzyszącemu targom „Napędy i Sterowanie ’99”
4. DTC – Bezpośrednie Sterowanie Momentem, przewodnik techniczny nr 1. ABB Industry,
Zakład Napędów
5. Golusiński L., Rulaff B., Chrzan P.: Laboratorium automatyzacji napędu. Wyd. PG,
Gdańsk 1985
6. Januszewski S., Pytlak A., Rosnowska-Nowaczyk M., Świątek H.: Napęd elektryczny,
WSiP, Warszawa 1994
7. Januszewski S., Pytlak A., Rosnowska-Nowaczyk M., Świątek H.: Enegoelektronika
WsiP Warszawa 2004
8. Przemienniki częstotliwości ACS 600 o mocach od 2.2 do 315 kW – podręcznik
programowania wersja 1.0. ABB Industry Sp. z o.o., 1996. [ACS 600 Frequency
Converters 2.2 to 630 kW – Programming Manual. ABB Industry Oy, 1997]
9. Ptaszyński L.: Przetwornice częstotliwości. Envirotech, Poznań 1996.
10. Sidorowicz J.: Napęd elektryczny i jego sterowanie. Oficyna Wydawnicza Pol.
Warszawskiej, Warszawa 1994
11. Tunia H., Kaźmierkowski M.: Automatyka napędu przekształtnikowego. PWN,
Warszawa 1987
12. Tunia H., Winiarski B.: Energoelektronika: PWN, Warszawa 1994.
Wyszukiwarka
Podobne podstrony:
28 Montaż i badanie urządzeń energoelektronicznych
Badanie układu pompowego zasilanego przemiennikiem częstotliwości, Politechnika Opolska, sprawozdani
Badanie układu wentylatorowego zasilanego przemiennikiem częstotliwości, Politechnika Opolska, spraw
Badanie stabilności układów na podstawie kryterium Nyquista Zapas?zy i wzmocnienia
Badanie podstawowych ukladow cy Nieznany (2)
wzor protokol u nap, SiMR, Semestr VI, Lab. Układów Napędowych Pojazdów
Badanie liniowych układów scalonych
03 Badania i pomiary ukladow an Nieznany
Diagnozowanie i Naprawa Układów Napędowych w Pojazdach Rolniczych
18 Diagnozowanie i naprawa układów napędowych pojazdów
Badanie wysokonapięciowych układów izolacyjnych napięciem piorunowym, Elektrotechnika, Rok 2, TWN, L
Badanie wybranych układów przekładników prądu
5 Badanie właściwości układów cyfrowych TTL i CMOS
35 Pojęcia podstawowe układów napędowych
Badanie i pomiary układów analogowych stosowanych w telekomunikacji
więcej podobnych podstron