Układy statycznie niewyznaczalne. Metoda sił
Zakres zastosowań. Dowolne układy prętowego statycznie
niewyznaczalne. Implementacje numeryczne.
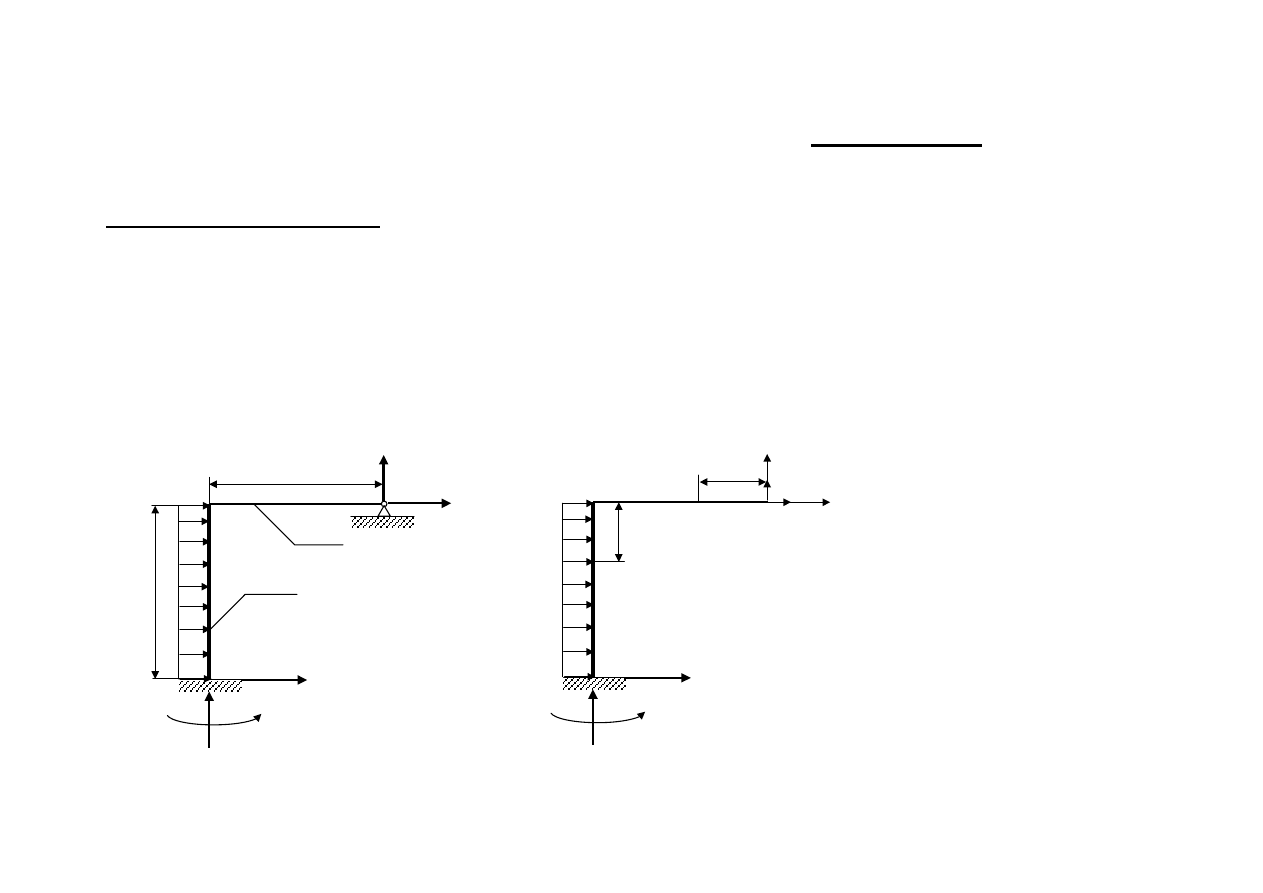
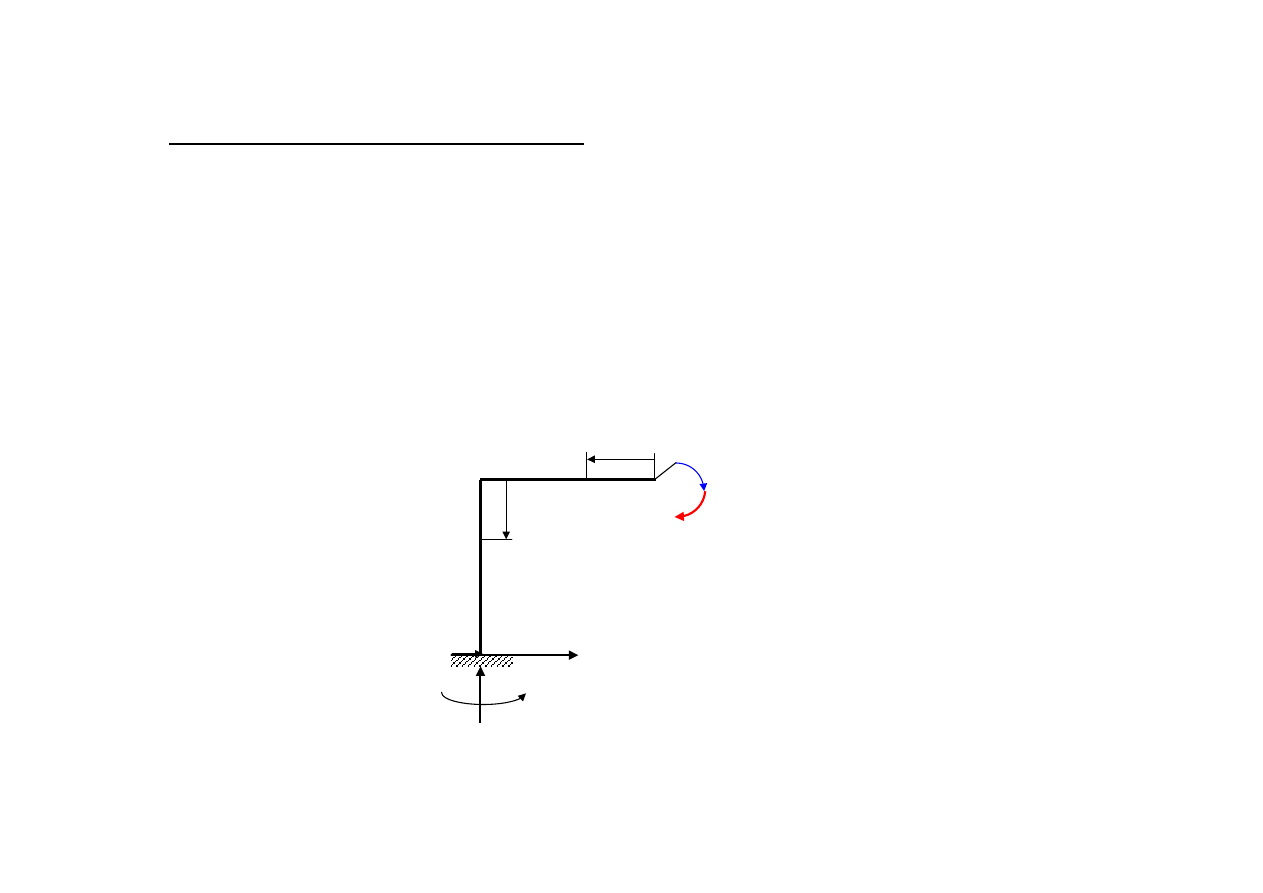
Przykład zastosowania. Rama płaska.
Dane: q, l, EI.
Wyznaczyć: reakcje podpór, wykresy sił wewnętrznych i kąt obrotu
przekroju C.
M
A
V
A
A
H
A
2EI
l
q
V
C
H
C
EI
l
C
B
M
A
V
A
A
H
A
X
1
q
u
2
X
2
x
C
B
x
u
1
Rzeczywisty układ
pr
ę
towy
Podstawowy układ
pr
ę
towy
Rozwiązanie
1. Określenie rodzaju i liczby wielkości podporowych i sformułowanie
równań równowagi
W punkcie C jest podpora przegubowa, w której występują reakcje H
C
(pozioma) oraz V
C
(pionowa). W punkcie A rama jest utwierdzona, a
więc występują tam reakcje H
A
(pozioma), V
A
(pionowa) i moment
utwierdzenia M
A
. Po oswobodzeniu z więzów rama (rzeczywisty układ
prętowy) jest w równowadze pod działaniem znanego obciążenia
równomiernie rozłożonego q oraz pięciu niewiadomych wielkości
podporowych H
C
, V
C
, H
A
, V
A
, M
A
. Tworzą one płaski układ sił, dla
którego można zapisać trzy równania równowagi statycznej:
0
=
+
+
ql
H
H
C
A
0
=
+
C
A
V
V
0
2
1
2
=
+
−
−
A
C
C
M
ql
l
H
l
V
2. Określenie stopnia statycznej niewyznaczalności i utworzenie
podstawowego układu prętowego
Liczba niewiadomych reakcji wynosi 5, a liczba równań równowagi 3.
Rama jest dwukrotnie statycznie niewyznaczalna (hiperstatyczna). Jako
wielkości hiperstatyczne przyjmujemy X
1
= H
C
i X
2
= V
C
. Usuwamy
więzy, które powodują powstawanie wielkości hiperstatycznych i
tworzymy w ten sposób układ podstawowy (statycznie wyznaczalny).
W przypadku rozważanej ramy oznacza to umożliwienie swobodnego
przemieszczania się punktu C w kierunku poziomym (odpowiadającym
X
1
) oraz pionowym (odpowiadającym X
2
), czyli oswobodzenie tego
punktu.
3. Określenie warunków geometrycznych oraz związków fizycznych
i sformułowanie równań kanonicznych metody sił

Układ podstawowy będzie równoważny układowi rzeczywistemu ramy
przy takich wartościach X
1
i X
2
, dla których są spełnione warunki
geometryczne:
0
,
0
2
1
=
=
u
u
Związki fizyczne, które określają przemieszczenie u
1
i u
2
jako liniowe
funkcje X
1
i X
2
oraz znanego obciążenia równomiernie rozłożonego q:
F
X
f
X
f
u
1
2
12
1
11
1
∆
+
+
=
F
X
f
X
f
u
2
2
22
1
21
2
∆
+
+
=
Po uwzględnieniu związków fizycznych w warunkach geometrycznych
otrzymujemy równania kanoniczne metody sił:
0
1
2
12
1
11
=
∆
+
+
F
X
f
X
f
0
2
2
22
1
21
=
∆
+
+
F
X
f
X
f
f
11
, f
12
– liczby wpływowe X
1
, X
2
na przemieszczenie u
1
f
21
, f
22
– liczby wpływowe X
1
, X
2
na przemieszczenie u
2

∆
1F
, ∆
2F
– część przemieszczeń u
1
, u
2
spowodowana działaniem
znanego obciążenia q.
Równań kanonicznych można napisać tyle, ile jest wielkości
hiperstatycznych.
Przyczyny powstawanie reakcji więzów oraz sił wewnętrznych i
naprężeń w przekrojach prętów układu prętowego statycznie
niewyznaczalnego:
– obciążenia zewnętrzne
– niedokładność wymiarów – naprężenia montażowe
– zmiany temperatury – naprężenia termiczne
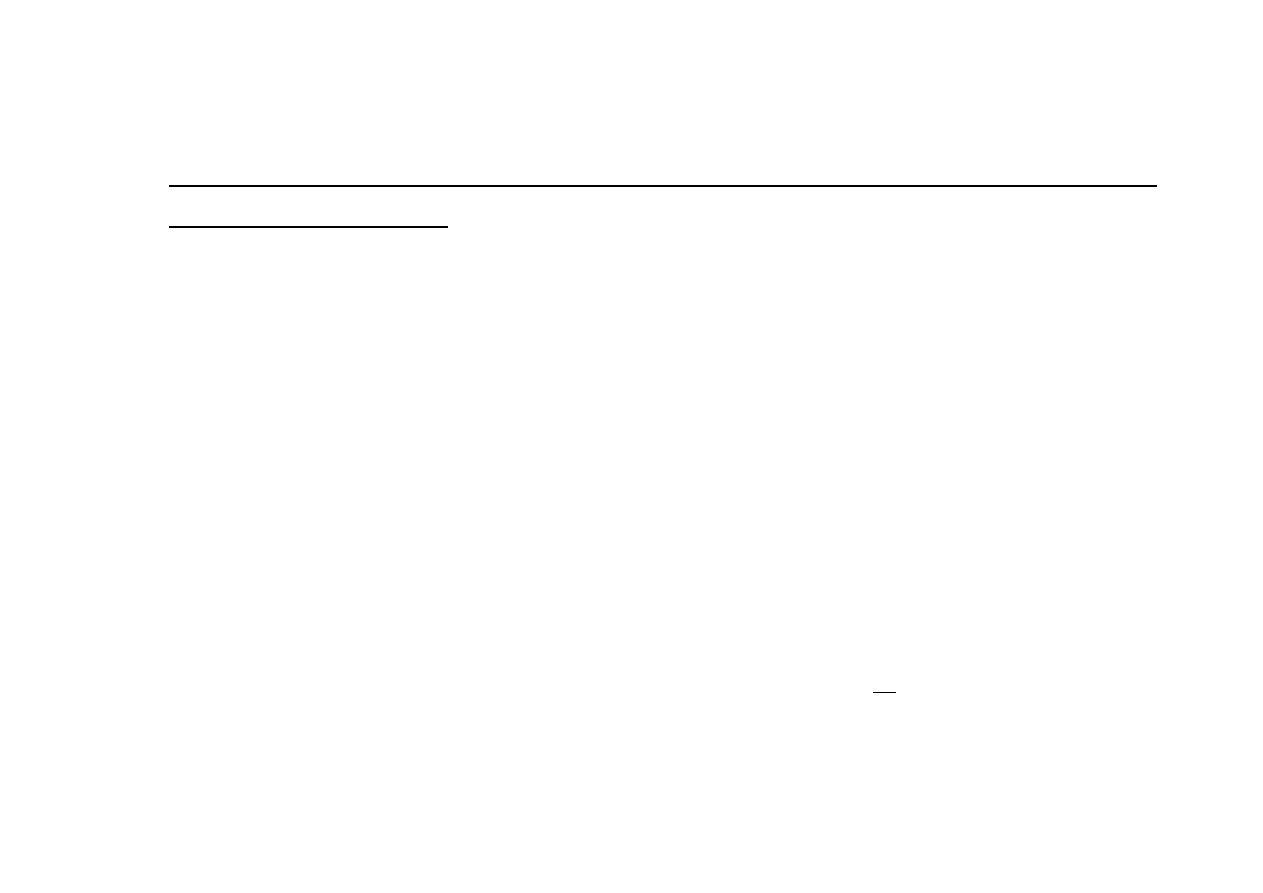
4. Wyznaczenie współczynników równań kanonicznych metody sił
Liczby wpływowe f
11
, f
12
, f
21
, f
22
, określają własności sprężyste układu
podstawowego oraz równoważnego układu rzeczywistego.
Są one przemieszczeniami w statycznie wyznaczalnym układzie
podstawowym, spowodowanymi jednostkowymi siłami
hiperstatycznymi lub znanymi obciążeniami zewnętrznymi
Można je wyznaczyć metodą Maxwella-Mohra.
Rozważamy układ podstawowy obciążony kolejno siłami X
1
= 1, X
2
= 1
oraz q.
Przypadek ogólny: liczba wariantów obciążeń układu podstawowego o
jeden większa od liczby wielkości hiperstatycznych.
M
A1
V
A1
l,EI
H
A1
X
1
=1
x
l, 2EI
x
M
A2
V
A2
l,EI
H
A2
X
2
= 1
x
l, 2EI
x
M
Aq
V
Aq
H
Aq
q
x
x
l,EI
l, 2EI

Założenia:
– uwzględniamy tylko energię sprężystą zginania
– w każdym wariancie obciążenia identyczne przedziały 1 i 2 oraz
współrzędne x określające położenie przekroju pręta. Przedział 1 –
pręt poziomy BC, przedział 2 – pręt pionowy BA. W obydwu
przedziałach
l
x
≤
≤
0
. Przyjmujemy ponadto, że
– moment gnący M
g
dodatni zakrzywia, a ujemny prostuje ramę.
Rezultat: momenty gnące zależą wyłącznie od X
1
= 1, X
2
= 1 albo q.
Nie ma potrzeby wyliczania pozostałych reakcji
Dla siły hiperstatycznej X
1
= 1 momenty gnące wynoszą:
x
M
M
g
g
=
=
21
11
,
0
Dla siły hiperstatycznej X
2
= 1:
l
M
x
M
g
g
−
=
−
=
22
12
,
Dla obciążenia zewnętrznego q:

2
2
1
2
1
,
0
qx
M
M
F
g
F
g
=
=
Siły X
1
= 1, X
2
= 1
– przyczyna wywołująca moment gnący
– uogólniona siła jednostkowa odpowiadająca przemieszczeniu
Współczynniki równań kanonicznych.
f
12
– siła X
2
= 1 – przyczyna powodująca przemieszczenie (momenty
gnące M
g12
, M
g22
)
– siła X
1
= 1 – siła jednostkowa odpowiadającą przemieszczeniu
(momenty gnące M
g11
, M
g21
).
21
3
0
21
22
0
11
12
12
4
2
1
1
f
EI
l
dx
M
M
EI
dx
M
M
EI
f
l
g
g
l
g
g
=
−
=
+
=
∫
∫
Pozostałe współczynniki równań kanonicznych:
EI
l
dx
M
EI
dx
M
EI
f
l
g
l
g
6
2
1
1
3
0
2
21
0
2
11
11
=
+
=
∫
∫
EI
ql
dx
M
M
EI
dx
M
M
EI
l
g
F
g
l
g
F
g
F
16
2
1
1
∆
4
0
21
2
0
11
1
1
=
+
=
∫
∫
EI
l
dx
M
EI
dx
M
EI
f
l
g
l
g
6
5
2
1
1
3
0
2
22
0
2
12
22
=
+
=
∫
∫
EI
ql
dx
M
M
EI
dx
M
M
EI
l
g
F
g
l
g
F
g
F
12
2
1
1
∆
4
0
22
2
0
12
1
2
−
=
+
=
∫
∫
5. Wyznaczenie z równań kanonicznych metody sił wielkości
hiperstatycznych
Po uwzględnieniu znanych już współczynników w równaniach
kanonicznych można wyznaczyć z nich wielkości hiperstatyczne X
1
i X
2
:
C
C
V
ql
ql
X
H
ql
ql
X
EI
ql
X
EI
l
X
EI
l
EI
ql
X
EI
l
X
EI
l
=
−
≅
−
=
=
−
≅
−
=
⇒
=
−
+
−
=
+
−
023
,
0
44
1
409
,
0
22
9
0
12
6
5
4
0
16
4
6
2
1
4
2
3
1
3
4
2
3
1
3
Równanie kanoniczne metody sił w zapisie rachunku macierzowego
F
F
∆
−
=
⇒
=
∆
+
−
1
F
X
0
FX
=
22
21
12
11
f
f
f
f
F
– macierz podatności układu podstawowego
obciążonego tylko siłami X
1
, X
2
X = [X
1
X
2
]
T
– jednokolumnowa macierz wielkości hiperstatycznych
∆
F
= [∆
1F
∆
2F
]
T
– jednokolumnowa macierz przemieszczeń
spowodowanych obciążeniem rzeczywistym,
odpowiadających wielkościom hiperstatycznym.
6. Wyznaczenie pozostałych sił niewiadomych, na podstawie równań
równowagi statycznej.
ql
ql
H
H
C
A
591
,
0
−
=
−
−
=
ql
V
V
C
A
023
,
0
=
−
=

2
2
114
,
0
2
1
ql
ql
l
H
l
V
M
C
C
A
=
+
+
−
=
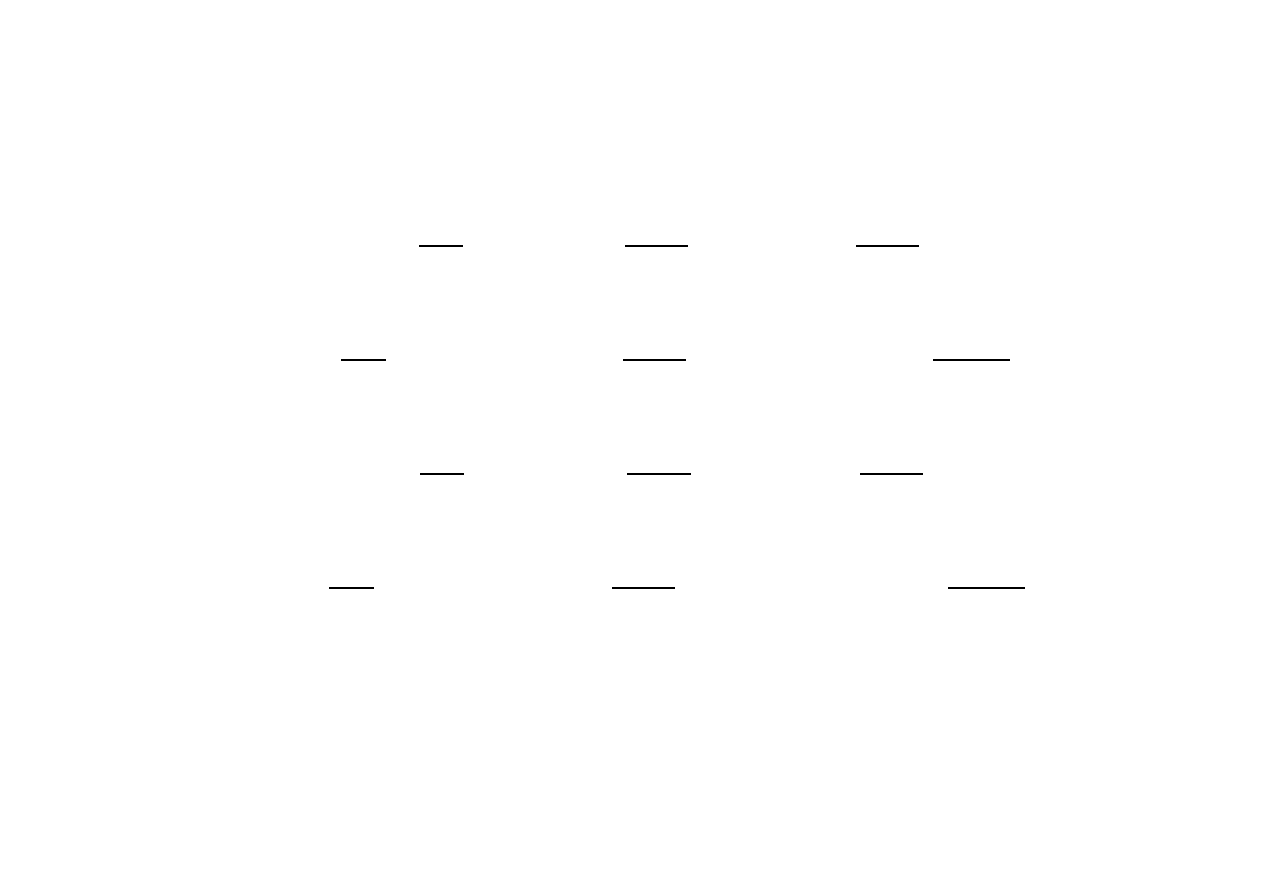
7. Sformułowanie równań i narysowanie wykresów sił wewnętrznych.
Przedział 1 (
l
x
≤
≤
0
)
qlx
x
X
M
g
023
,
0
2
1
=
−
=
dla x = 0, M
g1
= 0, dla x = l,
2
1
023
,
0
ql
M
g
=
ql
X
T
023
,
0
2
1
=
−
=
ql
X
N
409
,
0
1
1
−
=
=
Przedział 2 (
l
x
≤
≤
0
)
2
2
2
2
1
2
2
1
44
1
22
9
2
1
qx
ql
qlx
qx
l
X
x
X
M
g
+
+
−
=
+
−
=
dla x = 0,
2
2
023
,
0
ql
M
g
=
, dla x = l,
2
2
114
,
0
ql
M
g
=
l
x
qx
ql
dx
dM
ekstr
g
409
,
0
0
22
9
2
=
⇒
=
+
−
=
Ponieważ
0
2
2
2
>
=
q
dx
M
d
g
, jest to minimum lokalne
Dla
2
min
2
2
061
,
0
,
409
,
0
ql
M
M
l
x
x
g
g
ekstr
−
=
=
=
=
qx
ql
qx
X
T
+
−
=
+
=
409
,
0
1
2
dla x = 0,
ql
T
409
,
0
2
−
=
dla x = l,
ql
T
591
,
0
2
=
2
2
2
023
,
0
ql
X
N
=
=
0,114ql
2
0,409l
0,023ql
2
-0,061ql
2
Wykres M
g
0,591ql
0,023ql
-0,409ql
Wykres T
-0,023ql
-0,409ql
Wykres N
8. Wyznaczenie przemieszczeń
Aby wyznaczyć metodą Maxwella-Mohra kąt obrotu końcowego
prawego przekroju pręta BC, należy w punkcie C przyłożyć moment
jednostkowy i określić spowodowane nim momenty gnące M
’
g1
M
’
g2
w
obydwu przedziałach.
Rozważamy statycznie wyznaczalny układ podstawowy.
M’
A
V’
A
l,EI
H’
A
x
l, 2EI
x
A
B
C
u
1
Momenty gnące spowodowane obciążeniem q i znanymi siłami X
1
, X
2
(M
g1
M
g2
) oraz momentem jednostkowym, odpowiadającym kątowi
obrotu u przekroju C (M
’
g1
M
’
g2
) wynoszą:
1
,
44
1
1
1
=
′
=
g
g
M
qlx
M
1
,
2
1
44
1
22
9
2
2
2
2
=
′
+
+
−
=
g
g
M
qx
ql
qlx
M
Przemieszczenie uogólnione u (kąt obrotu w punkcie C) wyznaczone
metodą Maxwella-Mohra:
EI
ql
dx
M
M
EI
dx
M
M
EI
u
l
g
g
l
g
g
264
2
1
1
3
0
2
2
0
1
1
=
′
+
′
=
∫
∫
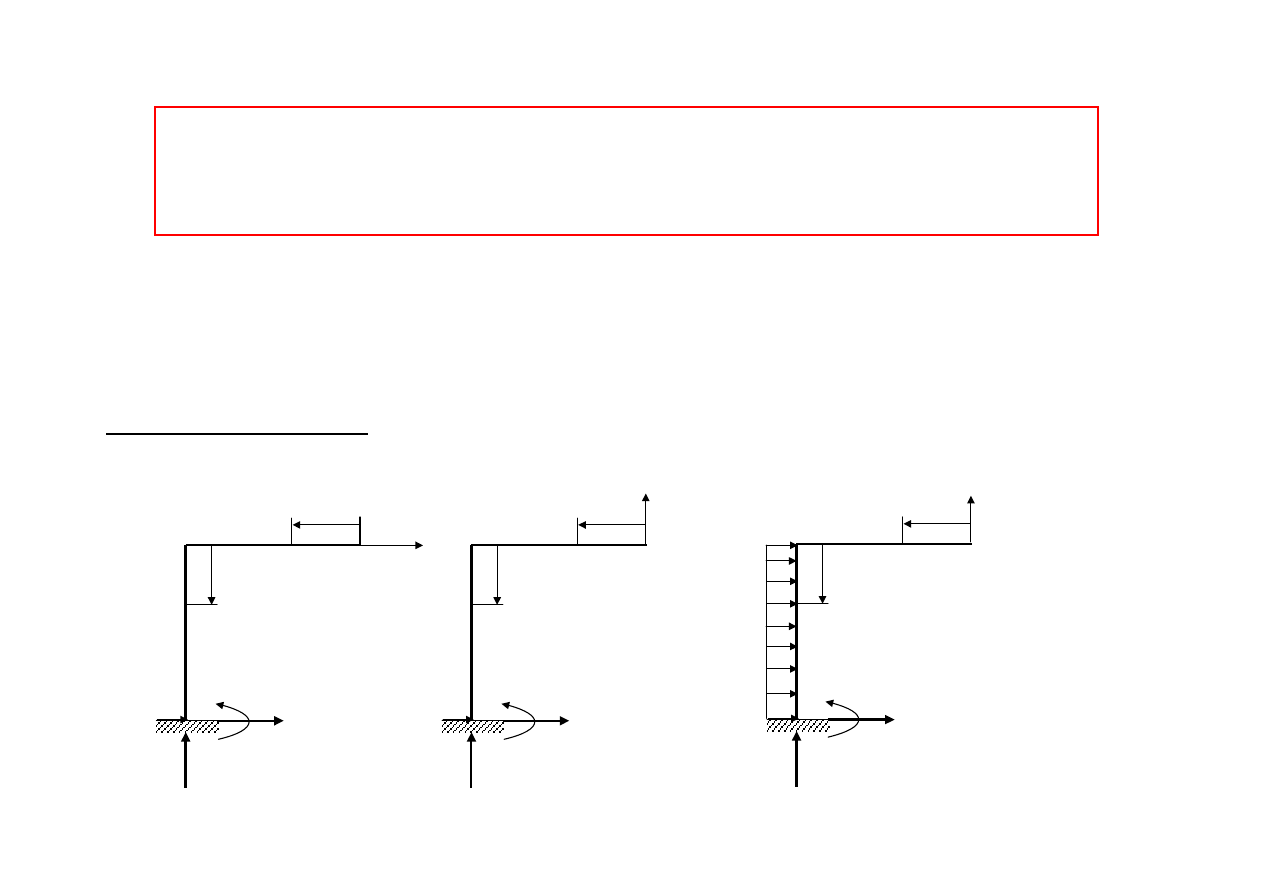
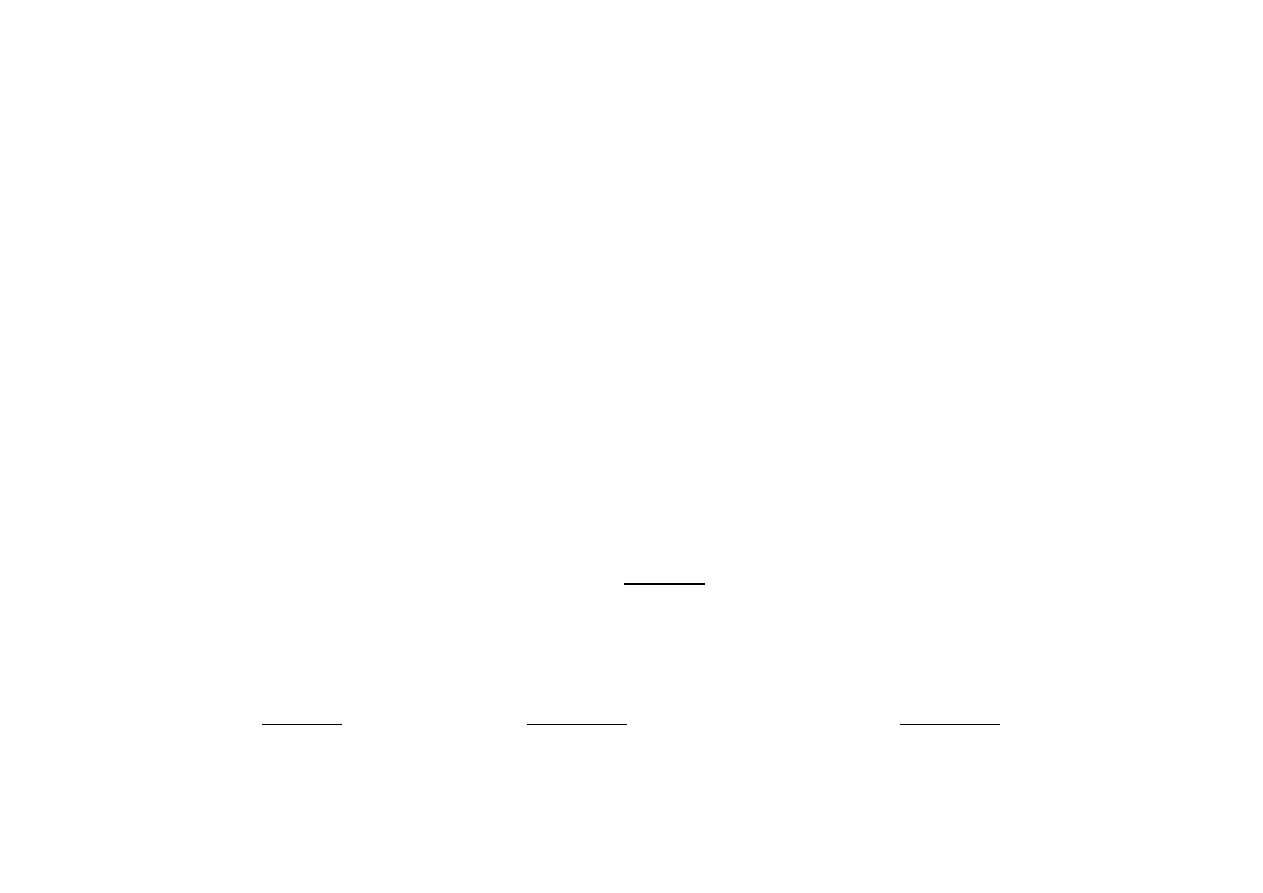
Przykład 1.
Rama płaska jest obciążona dwoma równymi, przeciwnie zwróconymi i
leżącymi na jednej prostej siłami F. Narysować wykresy sił
wewnętrznych, jeśli wszystkie pręty mają długość l, a sztywność na
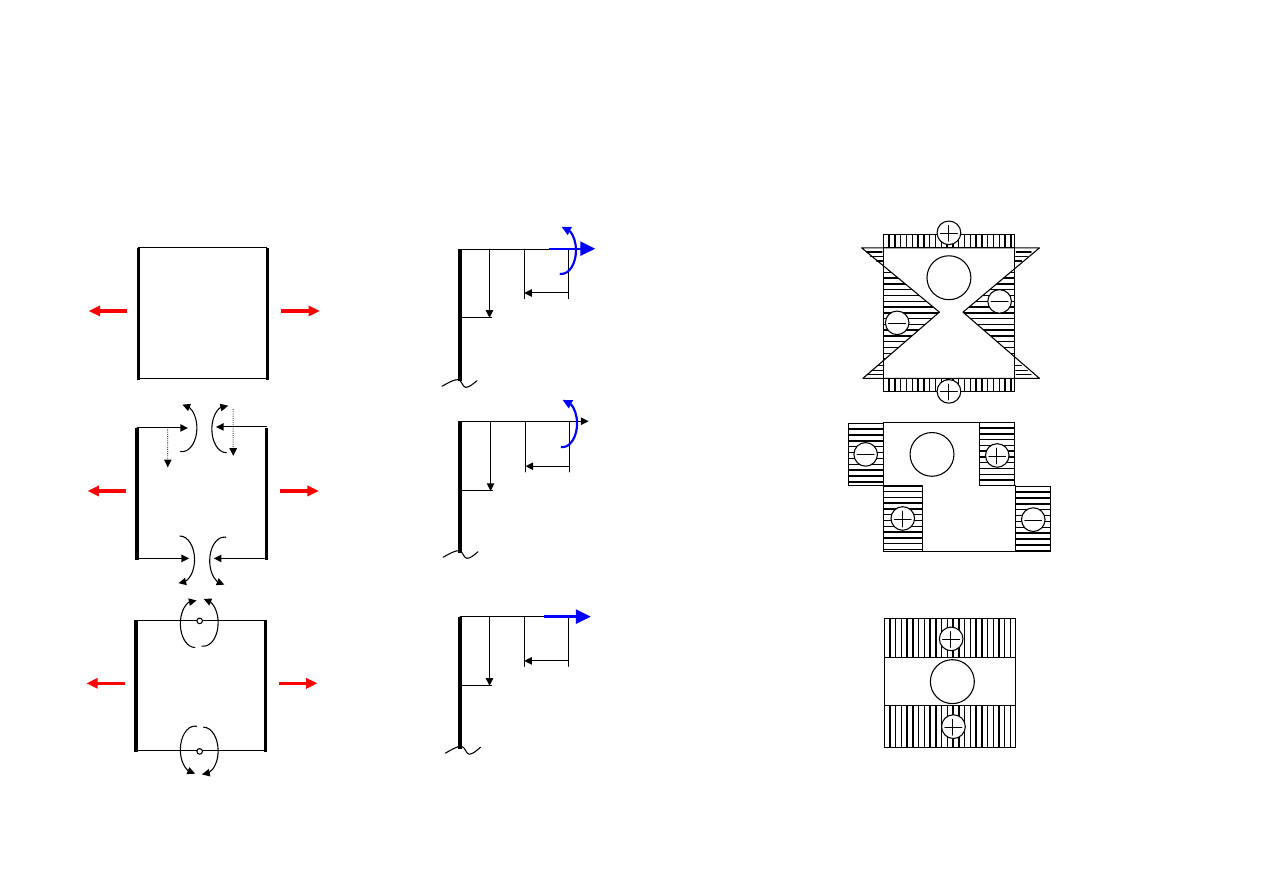
zginanie prętów poziomych oraz pionowych wynoszą odpowiednio EI
oraz 2EI.
F
F
F
F
F
F
M
N
X
M
M
?
?
T = 0
M M
F/2
X
1
x
x
1
l/2
2
l/2
Przedziały w
ć
wiartce ramy
X
1
= 1
x
x
1
l/2
l/2
F/2
x
x
1
l/2
l/2
2
2
M
g
Fl/24
-11Fl/24
-F/2
N
F/2
F/2
-F/2
T
F/2
F/2

Rozwiązanie. „Przecinamy” ramy pionową płaszczyzną symetrii
Z warunków równowagi:
N = F/2
T = 0
Moment gnący M – wielkość hiperstatyczna X
1
.
Układ podstawowy – swobodny wzajemny obrót lewej i prawej strony
rozważanego przekroju.
Warunek geometryczny: przy obciążeniu siłami X
1
i F wzajemny kąt
obrotu u
1
lewej i prawej strony przekroju jest równy zeru
Równanie kanoniczne metody sił:
0
∆
1
1
11
1
=
=
+
u
f
X
F
Metoda Maxwella-Mohra – energia dla ćwiartki ramy i wynik mnożymy
przez cztery. Równania momentów gnących wywołanych siłą X
1
= 1
oraz obciążeniem F w przedziałach 1, 2
Dla 0< x< l/2
x
F
M
M
M
M
F
g
F
g
g
g
2
,
0
1
,
1
2
1
21
11
−
=
=
=
=
czyli:
EI
l
dx
M
EI
dx
M
EI
f
l
g
l
g
3
2
4
4
2
0
2
21
2
0
2
11
11
=
+
=
∫
∫
EI
Fl
dx
M
M
EI
dx
M
M
EI
l
g
F
g
l
g
F
g
F
8
2
4
4
∆
2
2
0
21
2
2
0
11
1
1
−
=
+
=
∫
∫
Z równania kanonicznego:

24
0
8
3
1
2
1
Fl
M
X
EI
Fl
EI
lX
=
=
⇒
=
−
−
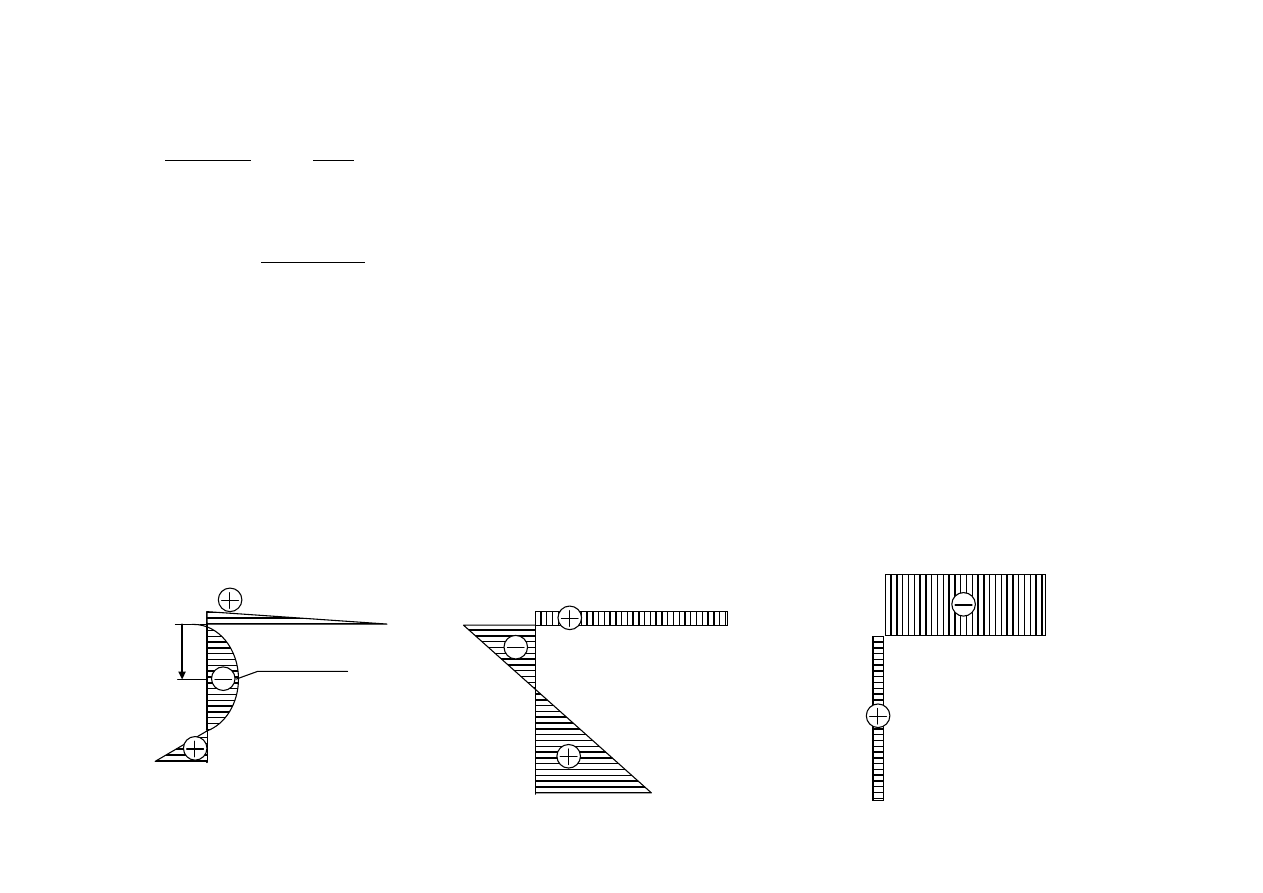
Równania momentów gnących M
g
sił poprzecznych T i normalnych N
mają postać:
x
F
Fl
M
Fl
M
g
g
2
24
,
24
2
1
−
=
=
2
,
0
2
1
F
T
T
−
=
=
0
,
2
2
1
=
=
N
F
N
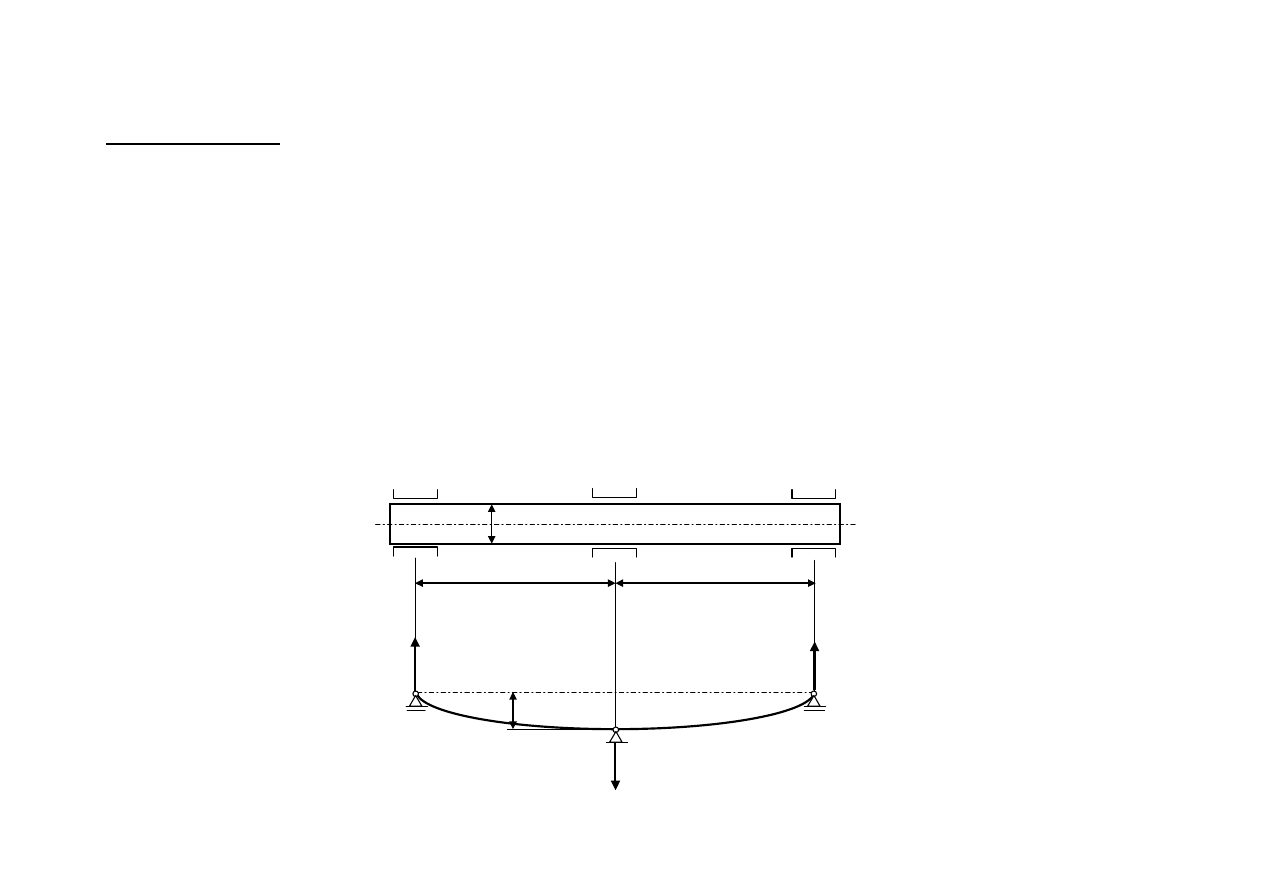
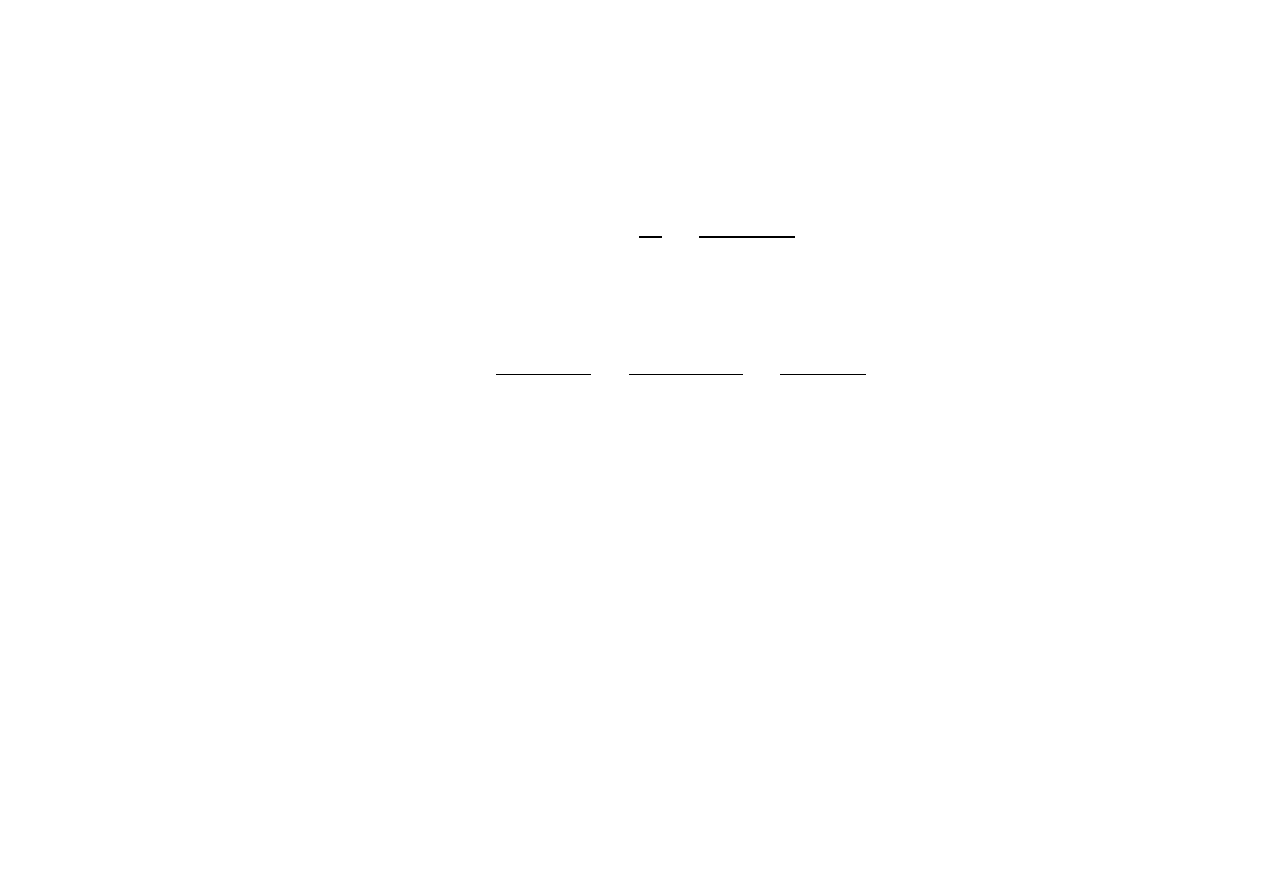
Przykład 2. Wałek o długości l i średnicy d, wykonany z materiału o
współczynniku sprężystości podłużnej E, jest osadzony w trzech
łożyskach. Obliczyć maksymalne naprężenie normalne w wałku po jego
zmontowaniu, jeśli oś łożyska środkowego jest przesunięta o δ
względem osi dwóch pozostałych łożysk.
Rozwiązanie. Wałek modelowany jako belka na trzech podporach.
Wystąpią reakcje R
A
, R
B
, R
C
.
A
d
l/2
l/2
R
A
B
R
B
= X
1
R
C
C
δ
ło
ż
ysko
Warunek równowagi: R
A
= R
C
= R
B
/2
Zadanie jednokrotnie statycznie niewyznaczalne.
Wielkość hiperstatyczna: R
B
= X
1
Równanie kanoniczne metody sił:
δ
=
=
+
1
1
11
1
∆
u
f
X
F
Warunek geometryczny, aby można było zmontować wałek.
Liczba wpływowa f
11
– ugięcie belki o rozpiętości l i sztywności EI
podpartej swobodnie na końcach i obciążonej w środku siłą X
1
= 1
EI
l
f
48
3
11
=
.
Przemieszczenie ∆
1F
= 0 – nie ma obciążenia zewnętrznego:
3
3
1
3
1
24
,
48
48
l
EI
R
R
R
l
EI
X
EI
l
X
C
A
B
δ
δ
δ
=
=
=
=
⇒
=
Moment gnący osiąga wartość maksymalną w przekroju środkowym
wałka i wynosi:
2
max
12
2
l
EI
l
R
M
A
g
δ
=
=
Maksymalne montażowe naprężenie normalne w wałku wynosi:
2
max
max
max
6
2
l
d
E
I
d
M
W
M
g
g
δ
σ
=
=
=
Wyszukiwarka
Podobne podstrony:
m wm s7 mibm w14
Labolatorium mcim poprawa 1, Politechnika Krakowska WM MiBM I i II rok (hasło łyszałdmoszumanski), m
Politechnika Krakowska, Politechnika Krakowska WM MiBM I i II rok (hasło łyszałdmoszumanski), mierni
rozwiazany test, POLITECHNIKA ŚLĄSKA Wydział Mechaniczny-Technologiczny - MiBM POLSL, Semestr 4, Stu
ćw3 chfl s4 w05 doc
acl WM MiBM 12 13
wm 2011 zad 2
JPC W05
w05
W05
2013 w05 DMA HWI 2013zid 28362 Nieznany
bal w05
MiBM Zestaw II
Obrony MiBM
BD 2st 1 2 w05 tresc 1 1
więcej podobnych podstron