
1
5. Ocena procesu przetwarzania energii
W poprzednich rozdziałach rozważano przetworniki o dwóch cewkach umieszczonych we
wspólnym obwodzie magnetycznym. Przetworniki takie mogą przetwarzać energię mechaniczną na
elektryczną lub odwrotnie, lecz aby było to użyteczne muszą być spełnione pewne warunki. Zostaną
one wyjaśnione na przykładzie najprostszego przetwornika o dwóch cewkach oraz cylindrycznym
obwodzie magnetycznym, przedstawionego schematycznie na Rys. 3.2. Dla jasności tych analiz
założono, że indukcyjność wzajemna tych cewek zmienia się zgodnie z funkcją
ϕ
⋅
=
ϕ
cos
M
)
(
M
,
która stanowi najprostszą aproksymację właściwości indukcyjności wzajemnej przedstawionej na Rys.
3.4. Równania takiego przetwornika mają postać
(
)
1
1
1
2
1
1
R
cos
M
L
d
d
u
i
i
i
t
=
⋅
+
⋅
ϕ
⋅
+
⋅
(5.1a)
(
)
2
2
2
2
2
1
R
L
cos
M
d
d
u
i
i
i
t
=
⋅
+
⋅
+
⋅
ϕ
⋅
(5.1b)
ϕ
⋅
⋅
⋅
−
=
ϕ
+
ϕ
sin
M
d
d
D
d
d
J
2
1
z
2
2
i
i
m
t
t
(5.1c)
Aby objaśnić możliwie prosto efekty przetwarzania energii rozpatrzony zostanie najprostszy
przypadek gdy przez cewki ‘1’ oraz ‘2’ płyną prądy stałe w czasie
1
1
I
)
(
=
t
i
oraz
2
2
I
)
(
=
t
i
. Wówczas
przetwornik wytworzy moment elektromagnetyczny stały w czasie
ϕ
⋅
⋅
⋅
−
=
sin
I
I
M
2
1
em
m
To spowoduje, że część obrotowa przetwornika ustawi się w takim położeniu
0
ϕ
, aby spełnić
równanie równowagi statycznej
0
em
z
=
+
m
m
czyli
0
sin
I
I
M
0
2
1
z
=
ϕ
⋅
⋅
⋅
−
m
(5.2)
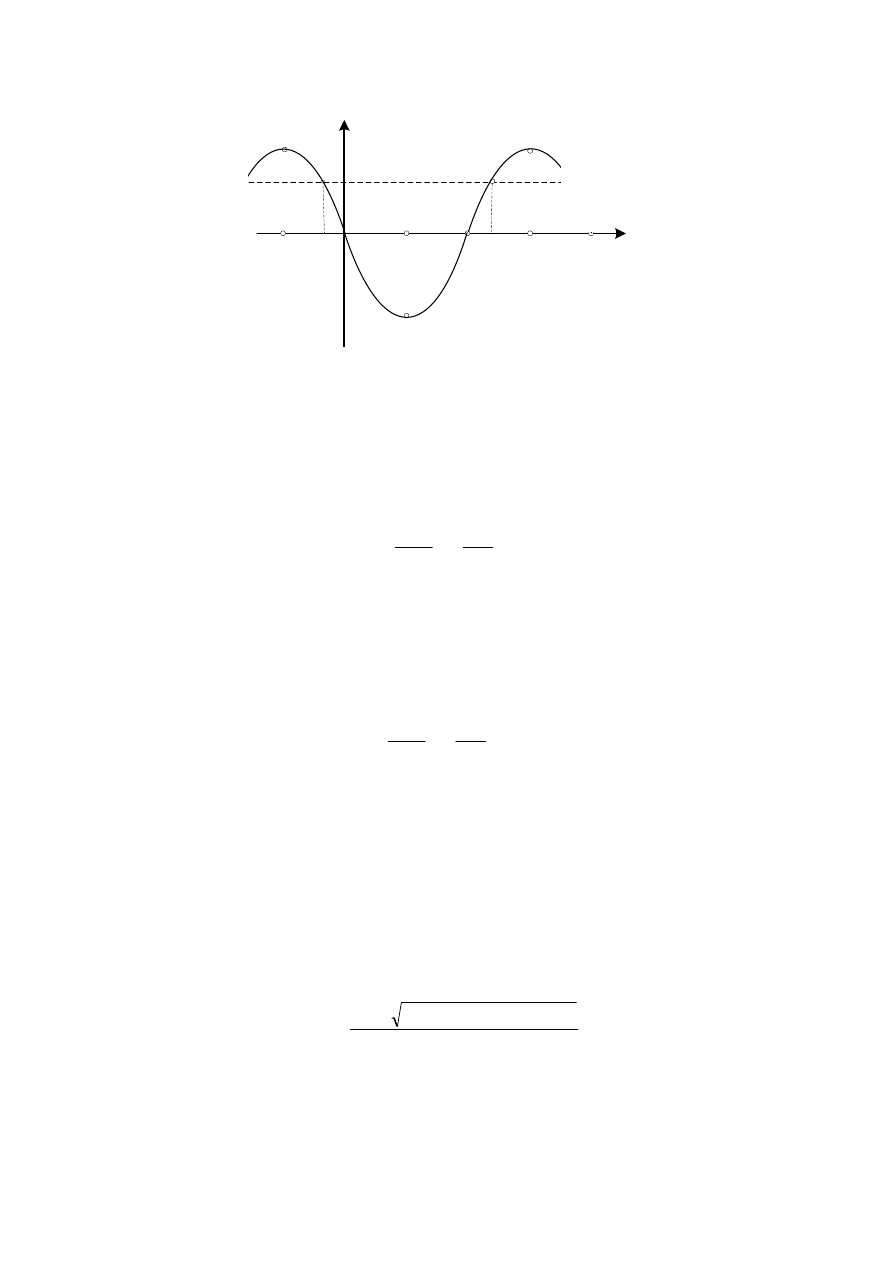
tj. aby moment elektromagnetyczny zrównoważył zewnętrzny moment mechaniczny. Dla dodatnich
kątów
0
ϕ
moment elektromagnetyczny będzie działał przeciwnie do kąta obrotu i będzie równoważył
dodatni moment mechaniczny, a dla kątów ujemnych moment elektromagnetyczny będzie działał
zgodnie z kątem obrotu i równoważył ujemny moment mechaniczny. Na Rys. 5.1. przedstawiono
wykres zmian momentu elektromagnetycznego w funkcji kąta
ϕ
, z którego wynika, ze są możliwe
dwa położenia równowagi
1
,
0
ϕ
oraz
2
,
0
ϕ
, które zaznaczono na rysunku dla ujemnego momentu
mechanicznego, czyli dla przypadku, gdy przetwornik ma pokonać pewien mechaniczny moment
obrotowy. (Dla przypomnienia, gdy wartość momentu mechanicznego jest dodatnia działa on zgodnie
z kątem obrotu, gdy jego wartość jest ujemna działa przeciwnie do kąta obrotu)
2
em
m
1
,
0
ϕ
2
,
0
ϕ
π
/2
π
/2
−
π
/2
3π
π
2
ϕ
Rys.5.1. Zależność momentu elektromagnetycznego przetwornika od kąta obrotu
ϕ
Należy rozstrzygnąć, które z tych dwóch położeń jest położeniem stabilnym, tj. takim, gdy część
obrotowa z niego wytrącona powróci w to położenie, a które położeniem niestabilnym, tj. takim, gdy
część obrotowa z niego wytrącona nie powróci do tego położenia. W tym celu należy założyć, że kąt
0
ϕ
może zmienić się o pewną małą wartość
)
(
0
t
ϕ
∆
+
ϕ
. Wówczas równanie ruchu mechanicznego
przyjmuje postać
)
sin(
M
d
d
D
d
d
J
0
2
1
z
2
2
ϕ
∆
+
ϕ
⋅
⋅
⋅
−
=
ϕ
∆
+
ϕ
∆
i
i
m
t
t
(5.3)
Wyrażenie
)
sin(
0
ϕ
∆
+
ϕ
można dla małych wartości wahań
)
(t
ϕ
∆
aproksymować następująco
ϕ
∆
⋅
ϕ
+
ϕ
≈
ϕ
∆
⋅
ϕ
+
ϕ
∆
⋅
ϕ
=
ϕ
∆
+
ϕ
0
0
0
0
0
cos
sin
sin
cos
cos
sin
)
sin(
co pozwala rozdzielić równanie ruchu na równanie dla zaburzeń kąta
)
(t
ϕ
∆
0
)
cos
I
I
M
(
d
d
D
d
d
J
0
2
1
2
2
=
ϕ
∆
⋅
ϕ
⋅
⋅
⋅
+
ϕ
∆
+
ϕ
∆
t
t
(5.4a)
oraz na równanie równowagi statycznej określające kąt
0
ϕ
0
sin
I
I
M
0
2
1
z
=
ϕ
⋅
⋅
⋅
−
m
(5.4b)
Warunkiem zanikania zaburzenia
)
(t
ϕ
∆
jest, aby pierwiastki równania charakterystycznego
0
)
cos
I
I
M
(
D
J
0
2
1
2
=
ϕ
⋅
⋅
⋅
+
⋅
+
⋅
r
r
miały ujemne części rzeczywiste, gdyż wówczas zaburzenia kąta
)
(t
ϕ
∆
będą zanikały w czasie
2J
cos
I
I
M
J
4
D
D
0
2
1
2
2
,
1
ϕ
⋅
⋅
⋅
⋅
⋅
−
±
−
=
r
Pomijając człon
0
D
2
≈
(tłumienie ruchu obrotowego jest przeważnie bardzo małe) w wyrażeniu pod
pierwiastkiem można dość do wniosku, że warunkiem zanikania zaburzeń kątowych jest aby
0
cos
0
>
ϕ
, gdyż wówczas
3
J
cos
I
I
M
j
2J
D
0
2
1
2
,
1
ϕ
⋅
⋅
⋅
±
−
=
r
(5.5)
co oznacza, że przebiegi przejściowe mają charakter zanikających oscylacji. Zatem, dla
rozpatrywanego przetwornika stabilne położenia równowagi statycznej będą dla kątów z przedziału
2
π
2
π
0
<
ϕ
<
−
Ten prosty przykład pozwolił wyjaśnić pojęcie punktu równowagi statycznej oraz jego stabilności.
Taki sposób realizacji procesu przetwarzania energii nie jest jednak użyteczny technicznie, gdyż
przetwornik zasilany prądami stałymi obróci się jedynie o stały kąt, lecz nie może zostać
wprowadzony w ruch obrotowy, aby wydawać energię mechaniczną.
↓
*****************************************************************↓
Nieco ogólniejsze rozważania pozwalają określić warunek stabilności położenia równowagi statycznej
dla równania o postaci
)
(
)
(
d
d
D
d
d
J
em
z
2
2
ϕ
+
ϕ
=
ϕ
+
ϕ
m
m
t
t
W tym celu należy aproksymować wyrażenia na momenty mechaniczny oraz elektromagnetyczny
funkcjami liniowymi
ϕ
∆
⋅
ϕ
∂
ϕ
∂
+
ϕ
=
ϕ
ϕ
=
ϕ
0
)
(
)
(
)
(
z
0
z
z
m
m
m
;
ϕ
∆
⋅
ϕ
∂
ϕ
∂
+
ϕ
=
ϕ
ϕ
=
ϕ
0
)
(
)
(
)
(
em
0
em
em
m
m
m
W efekcie uzyskuje się warunek o postaci
0
)
(
)
(
0
0
em
z
<
ϕ
∂
ϕ
∂
+
ϕ
∂
ϕ
∂
ϕ
=
ϕ
ϕ
=
ϕ
m
m
↑
*****************************************************************↑
Proces użytecznego przetwarzania energii elektrycznej na mechaniczną można zrealizować
następująco. Niech cewka ‘1’ będzie zasilana ze źródła prądu przemiennego, a cewka ‘2’ ze źródła
prądu stałego.
)
(
cos
I
e
1
1
t
i
⋅
Ω
⋅
=
,
2
2
I
=
i
(5.6)
Wówczas, nie pytając o napięcia na tych cewkach, można określić moment elektromagnetyczny
wytworzony przez przetwornik. Będzie on wyrażony wzorem
ϕ
⋅
⋅
Ω
⋅
⋅
⋅
−
=
sin
)
(
cos
I
I
M
e
2
1
em
t
m
(5.7)
Aby otrzymać użyteczną energię ruchu obrotowego moment elektromagnetyczny musi mieć wartość
stałą w czasie, gdyż tylko wówczas przetwornik może wirować ze stałą prędkością kątową. Zależność
powyższa zapisana w postaci
4
=
ϕ
⋅
⋅
Ω
⋅
⋅
⋅
−
=
sin
)
(
cos
I
I
M
e
2
1
em
t
m
(
)
)
sin(
)
sin(
2
1
I
I
M
e
e
2
1
t
t
⋅
Ω
−
ϕ
+
⋅
Ω
+
ϕ
⋅
⋅
⋅
−
=
pozwala zauważyć, że warunek ten może zostać spełniony, gdy
0
e
ϕ
+
⋅
Ω
=
ϕ
t
lub
0
e
ϕ
+
⋅
Ω
−
=
ϕ
t
(5.8)
Wówczas moment elektromagnetyczny określają odpowiednio zależności
(
)
0
0
e
2
1
em
sin
)
2
sin(
I
I
M
2
1
ϕ
+
ϕ
+
⋅
Ω
⋅
⋅
⋅
−
=
t
m
(5.9a)
lub
(
)
)
2
sin(
sin
I
I
M
2
1
0
e
0
2
1
em
ϕ
−
⋅
Ω
−
ϕ
⋅
⋅
⋅
−
=
t
m
(5.9b)
W każdym z tych dwóch przypadków moment elektromagnetyczny posiada składową stałą w czasie
0
2
1
em,0
sin
I
I
M
2
1
ϕ
⋅
⋅
⋅
−
=
m
(5.10)
oraz składową przemienną o amplitudzie
2
1
2
1
I
I
M
⋅
⋅
oraz pulsacji
e
2
Ω
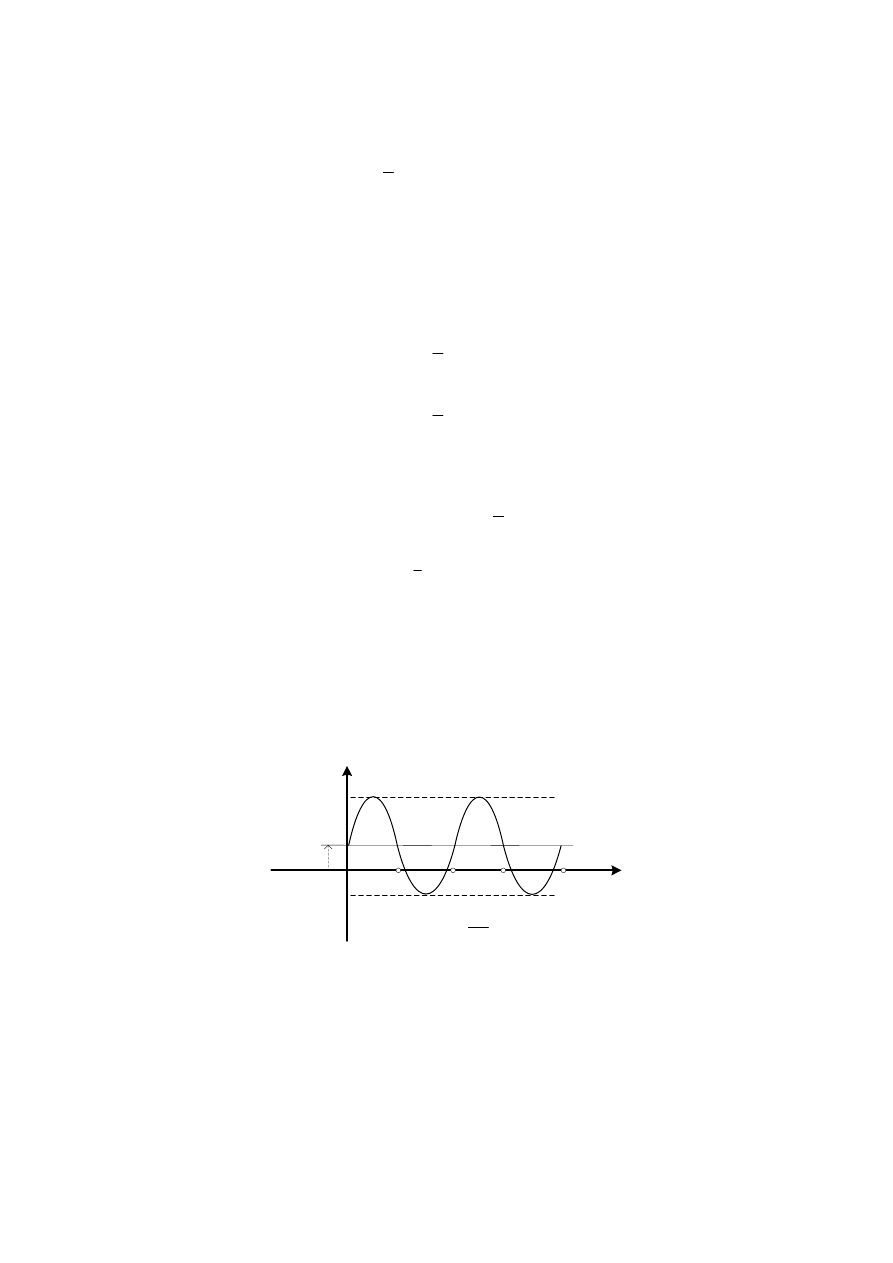
. Przebieg zmienności
momentu elektromagnetycznego w funkcji czasu przedstawiono na Rys. 5.2. Rozważany przetwornik
może trwale przetwarzać energię przy dwóch prędkościach kątowych
e
m
Ω
=
Ω
lub
e
m
Ω
−
=
Ω
, gdyż
składowa stała momentu elektromagnetycznego może równoważyć stały zewnętrzny obrotowy
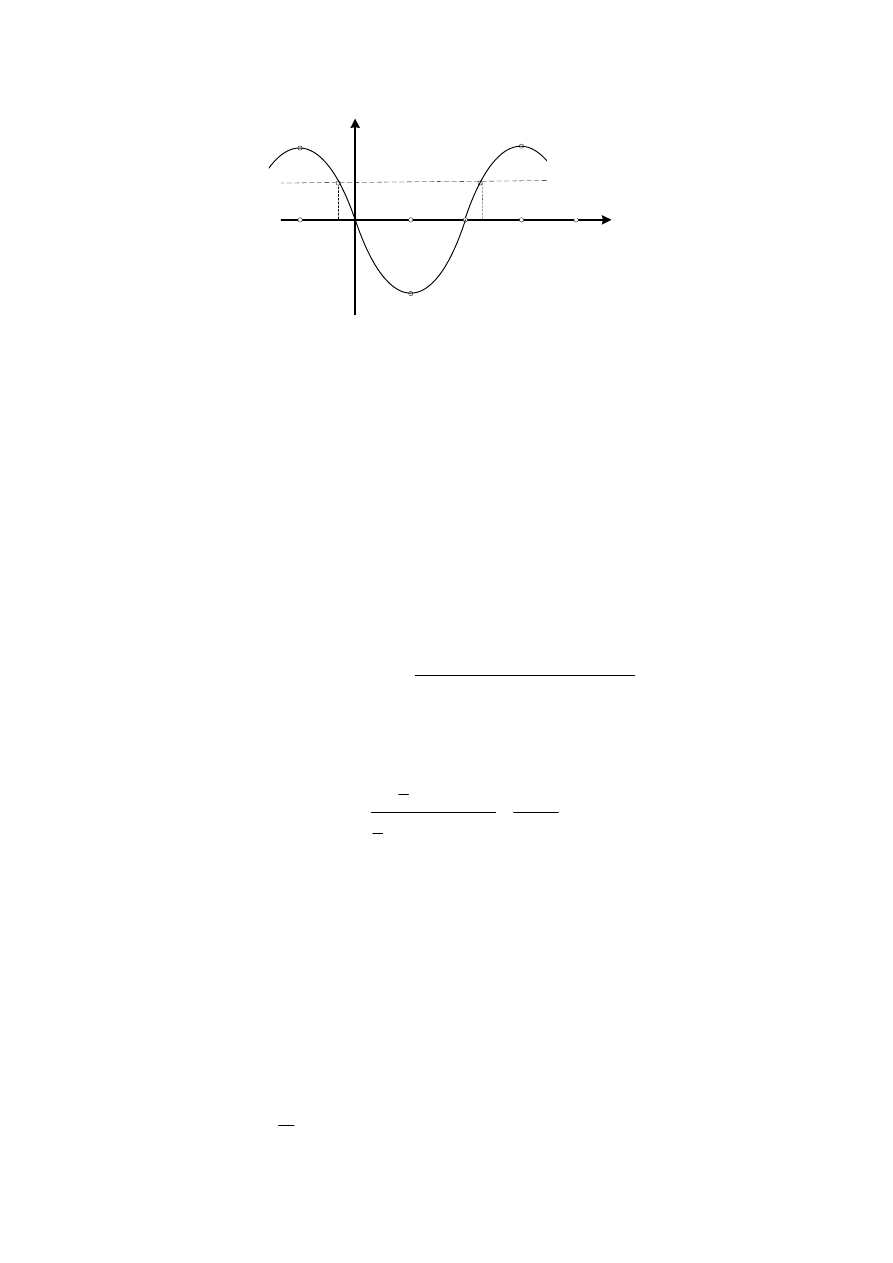
moment mechaniczny. Wartość średnia momentu elektromagnetycznego za okres jego zmienności
zależy od kąta
0
ϕ
, który określa położenie kątowe części obrotowej przetwornika w chwili, gdy prąd
w pierwszej cewce osiąga wartość maksymalną. Na Rys. 5.3 przedstawiono zmienność wartości
ś
redniej momentu elektromagnetycznego w funkcji kąta
0
ϕ
.
em
m
0
em,
m
t
e
e
2
T
Ω
π
=
e
T
2
/
T
e
Rys. 5.2. Moment elektromagnetyczny przetwornika w funkcji czasu
przy prędkości kątowej
e
m
Ω
=
Ω
5
em
m
1
,
0
ϕ
2
,
0
ϕ
π
/2
π
/2
−
π
/2
3π
π
2
0
ϕ
Rys. 5.3. Zależność średniej wartości moment elektromagnetyczny w funkcji kąta
0
ϕ
Porównując zmienność momentu elektromagnetycznego na Rys. 5.1 oraz Rys. 5.3 można zauważyć,
ż
e są one jakościowo identyczne, zatem rozważania o punktach równowagi statycznej oraz ich
stabilności przeprowadzone dla przetwornika zasilanego prądami stałymi przenoszą się na przypadek
zasilania cewki ‘1’ prądem przemiennym, lecz w tym drugim przypadku równowaga statyczna jest
osiągana przy ruchu obrotowym o stałej prędkości kątowej, a kąt
0
ϕ
wynika z równania
0
2
1
z
m
sin
I
I
M
D
ϕ
⋅
⋅
⋅
−
=
Ω
⋅
m
(5.11)
Jednak moment elektromagnetyczny zawiera także składową przemienną, która będzie zaburzać
proces przetwarzania energii, powodując wahania prędkości kątowej. Układy mechaniczne są bardzo
wrażliwe na obrotowe momenty przemienne i proces przetwarzania energii uważa się za tym lepszy
im mniejsza jest składowa przemienna momentu elektromagnetycznego. Jakość procesu przetwarzania
można określić za pomocą współczynnika wyrażającego stosunek amplitudy momentu składowej
przemiennej momentu elektromagnetycznego do wartości jego składowej stałej.
ś
rednia
wartośa
j
przemienne
skłkładow
amplituda
K
p
=
(5.12)
który dla idealnego przetwarzania powinien mieć wartość zero. Dla rozpatrywanego procesu
przetwarzania współczynnik ten wynosi
sin
1
sin
I
I
M
2
1
I
I
M
2
1
K
0
0
2
1
2
1
p
ϕ
=
ϕ
⋅
⋅
⋅
⋅
⋅
=
Jego minimalna wartość wynosi 1.0, co pozwala stwierdzić, że proces przetwarzania energii przez ten
przetwornik nie należy do efektywnych.
Proces przetwarzania energii mechanicznej ruchu obrotowego na energię elektryczną przez ten
przetwornik można zrealizować w następujący sposób. Niech część obrotowa przetwornika wykonuje
ruch obrotowy ze stała prędkością kątową
m
Ω
, co oznacza, że kąt obrotu narasta liniowo w czasie
zgodnie z funkcją
α
m
+
⋅
Ω
=
ϕ
t
. Gdy przez cewkę ‘2’ umieszczoną na części nieruchomej popłynie
prąd stały w czasie
2
2
I
=
i
, a cewka ‘1’ umieszczona na części stałej będzie rozwarta, (tj. nie będzie
przez nią płynął prąd, czyli
0
1
≡
i
), wówczas napięcie na cewce ‘1’ można wyliczyć z pierwszego z
trzech równań przedstawionych powyżej i wynosi ono
(
)
α
)
(
sin
I
M
I
α
)
cos(
M
d
d
m
m
2
2
m
1
+
⋅
Ω
⋅
Ω
⋅
⋅
−
=
⋅
+
⋅
Ω
⋅
=
t
t
t
u
6
Aby osiągnąć taki stan część obrotowa musi być napędzana momentem obrotowym
z
m
D
m
=
Ω
⋅
, a
cewka ‘2’ musi być zasilana napięciem
2
2
2
I
R
⋅
=
u
. W tych warunkach cewka ‘1’ stała się źródłem
napięcia przemiennego o amplitudzie
m
2
I
M
U
Ω
⋅
⋅
=
, zależnej od prądu cewki ’2’ oraz od prędkości
kątowej. W takich warunkach nie następuje jeszcze użyteczne przetwarzanie energii, gdyż energia
dostarczona do układu mechanicznego pokrywa straty konieczne, aby utrzymać stałą prędkość
obrotową, a energia dostarczona do cewki’2’ pokrywa starty mocy na jej rezystancji. Gdy do cewki ‘1’
przyłączymy odbiornik energii elektrycznej (np. rezystancję) wówczas w cewce ‘1’ zacznie płynąć
prąd
)
cos(
I
(t)
1
1
β
+
⋅
Ω
⋅
=
t
i
m
)
Cewka stanie się źródłem energii elektrycznej. Jeżeli utrzymywać prąd stały w cewce ‘2’ (
2
2
I
=
i
)
wówczas przetwornik wytworzy moment elektromagnetyczny
α
)
sin(
)
cos(
I
I
M
m
2
1
em
+
⋅
Ω
⋅
β
+
⋅
Ω
⋅
⋅
⋅
−
=
t
t
m
m
który w istocie jest taki sam jak dla rozpatrywanego powyżej przypadku przetwarzania energii
elektrycznej na mechaniczną. Aby utrzymać stałą prędkość obrotową należy zwiększyć moment
obrotowy, który zrównoważy ten moment elektromagnetyczny. Ta dodatkowa energia mechaniczna
dostarczona do układu mechanicznego pojawi się jako energia elektryczna wydawana z cewki ’1’.
W rzeczywistości procesy przetwarzania w obydwóch opisanych powyżej przypadkach są nieco
bardzie skomplikowane, gdyż cewki są przeważnie zasilane ze źródeł napięciowych, a nie, jak
zakładano, prądowych. W celu analizy procesu przetwarzania energii należy rozwiązać układ równań
zapisanych na początku tego rozdziału, który – niestety – jest nieliniowy i można go rozwiązać
jedynie metodami numerycznymi przy zastosowaniu specjalnych pakietów programowych.
Jak wspomniano powyżej, proces przetwarzania energii przez w przetworniku o dwóch cewkach
nie jest idealny, gdyż generowana jest składowa przemienna momentu elektromagnetycznego, która
zaburza jednostajny ruch obrotowy. Występują także niekorzystne zjawiska elektromagnetyczne
wynikające z magnetycznego sprzężenia cewek. Poniżej pokazano dwa przetworniki, które
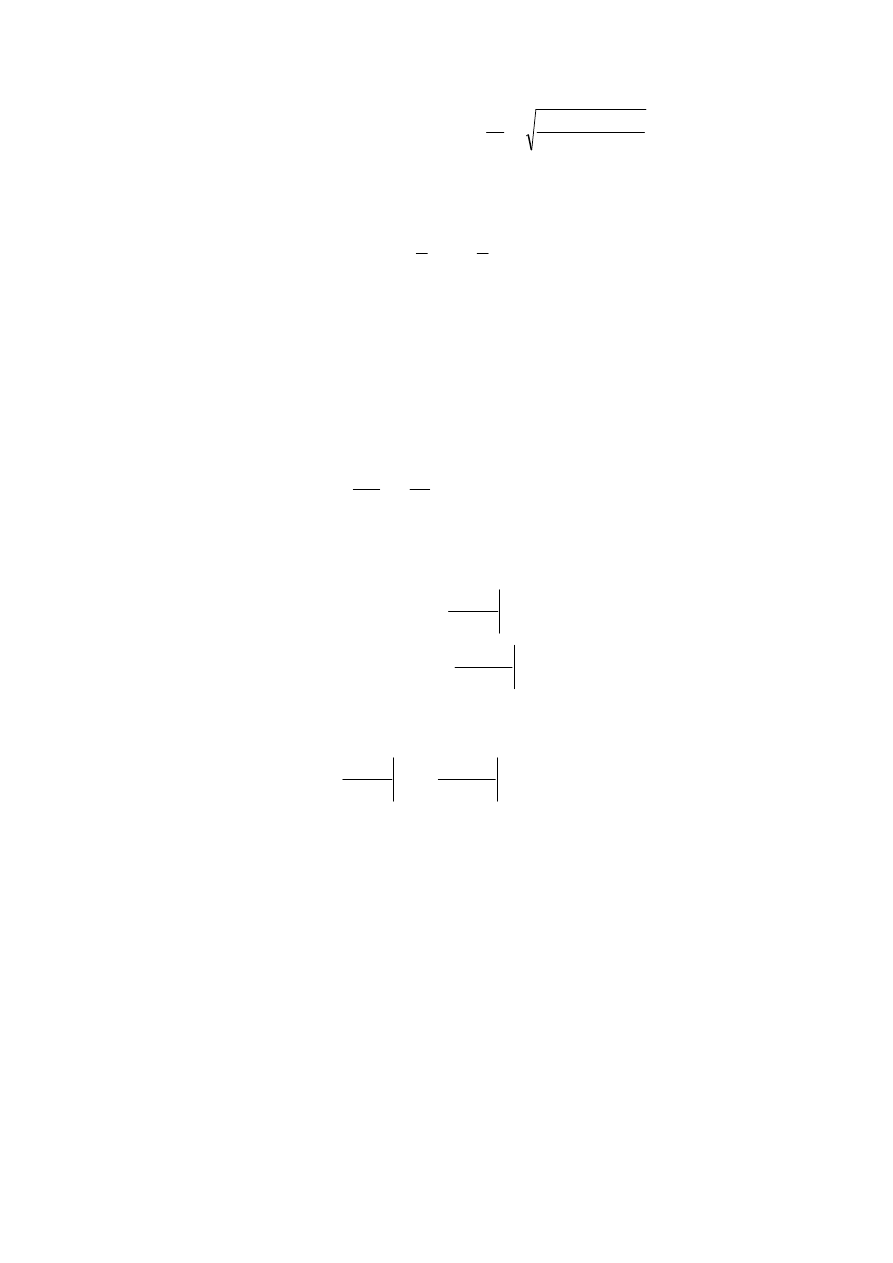
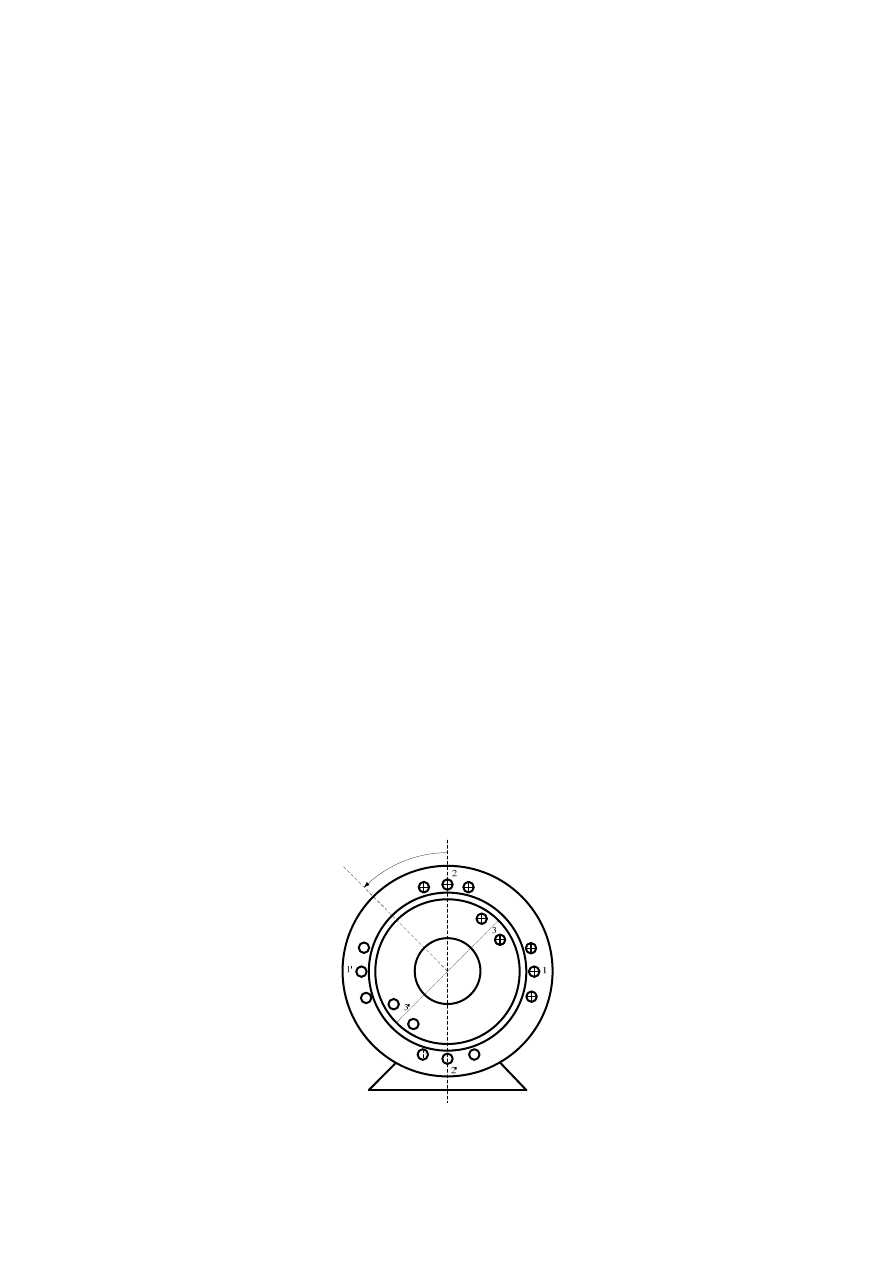
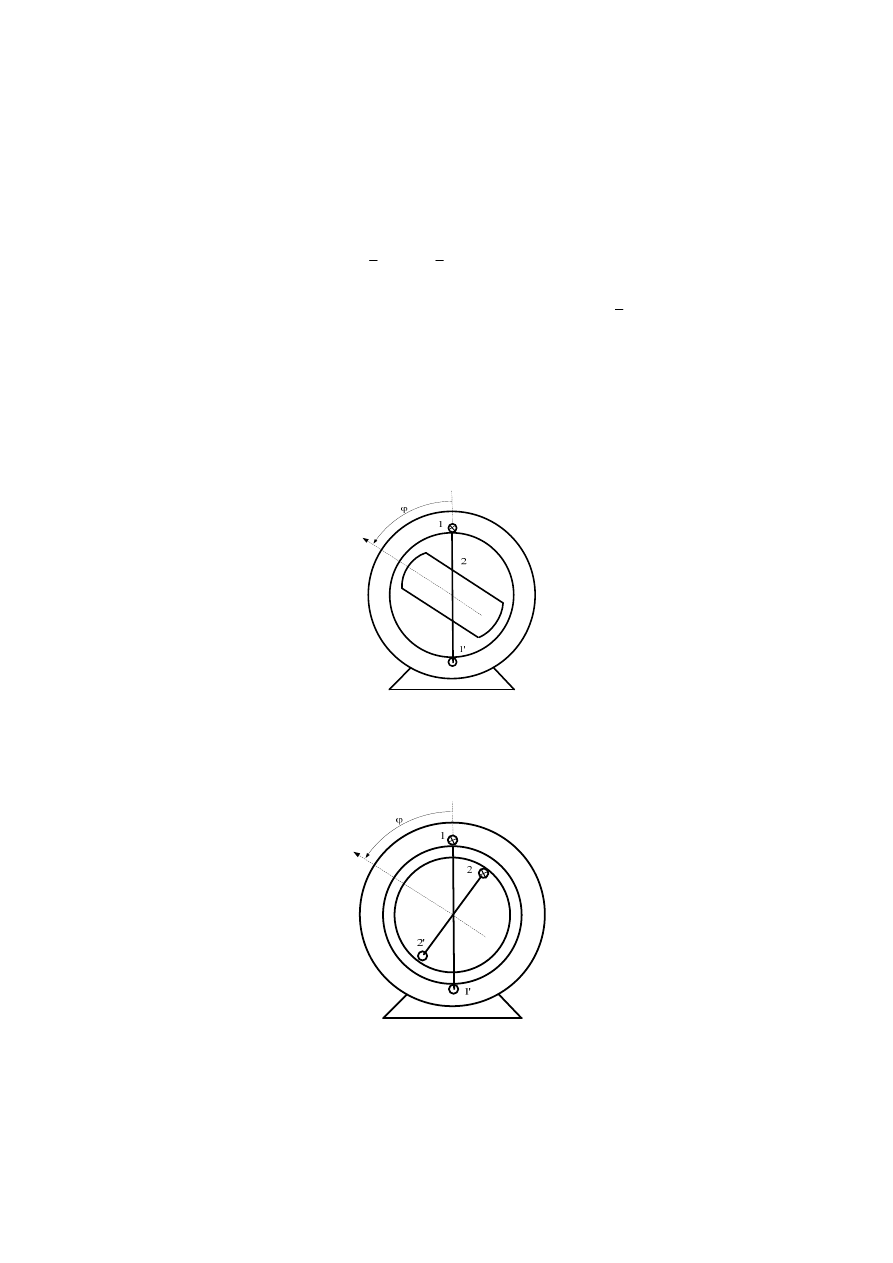
umożliwiają zrealizować proces przetwarzania energii idealnie. Na Rys. 5.4. przedstawiono
schematycznie przetwornik, który może poprawnie realizować proces przetwarzania energii. Ma on
dwie identyczne cewki na części nieruchomej, oznaczone jako ‘1’ i ‘2’, umieszczone prostopadle oraz
jedną cewkę na części obrotowej, oznaczona jako ’3’.
ϕ
Rys. 5.4. Przetwornik o trzech cewkach

7
Równania takiego przetwornika mają postać
=
⋅
+
⋅
ϕ
ϕ
ϕ
ϕ
3
2
1
3
2
1
3
3
2
1
3
3
2
3
1
3
2
3
1
R
0
0
0
R
0
0
0
R
L
)
(
)
(
)
(
L
0
)
(
0
L
d
d
u
u
u
i
i
i
i
i
i
M
M
M
M
t
,
,
,
,
(5.13a)
ϕ
∂
ϕ
∂
⋅
+
ϕ
∂
ϕ
∂
⋅
⋅
+
=
ϕ
+
ϕ
)
(
)
(
d
d
D
d
d
J
3
,
2
2
3
,
1
1
3
z
2
2
M
i
M
i
i
m
t
t
(5.13b)
w których uwzględniono wyróżnione powyżej jego cechy. Z identyczności cewek ‘1’ oraz ‘2’ wynika,
ż
e ich indukcyjności oraz rezystancje mają te same wartości
L
L
L
1
1
=
=
oraz
R
R
R
2
1
=
=
, a ich
prostopadłe usytuowanie powoduje, że nie są one sprzężone magnetycznie
0
M
M
2,1
1,2
=
=
. Jeżeli,
analogicznie jak dla przetwornika o dwóch cewkach, założyć, że indukcyjność wzajemną
)
(
3
1
ϕ
,
M
określa funkcja
ϕ
⋅
=
ϕ
cos
M
)
(
3
1
,
M
(5.14a)
to indukcyjność wzajemna
)
(
3
2
ϕ
,
M
będzie określona funkcją
ϕ
⋅
=
−
ϕ
⋅
=
ϕ
sin
M
)
2
π
cos(
M
)
(
3
2
,
M
(5.14b)
gdyż cewka ‘2’ jest przesunięta o kąt π/2 względem cewki ‘1’. Uwzględniając powyższe uwagi,
wyrażenie określające moment elektromagnetyczny przetwornika można zapisać w postaci
(
)
ϕ
⋅
+
ϕ
⋅
−
⋅
⋅
=
cos
sin
M
2
1
3
em
i
i
i
m
(5.15)
Jeżeli w takim przetworniku wymusimy przepływ prądów
)
(
cos
I
e
1
t
i
⋅
Ω
⋅
=
,
)
(
sin
I
e
2
t
i
⋅
Ω
⋅
=
,
3
3
I
=
i
to wzór na moment elektromagnetyczny przyjmie postać
(
)
=
ϕ
⋅
⋅
Ω
+
ϕ
⋅
⋅
Ω
−
⋅
⋅
⋅
=
cos
)
(
sin
sin
)
(
cos
I
I
M
e
e
3
em
t
t
m
)
sin(
I
I
M
e
3
ϕ
−
⋅
Ω
⋅
⋅
⋅
=
t
Wynika za niego, że gdy
0
e
ϕ
+
⋅
Ω
=
ϕ
t
, tj. przy prędkości kątowej
e
m
Ω
=
Ω
, moment
elektromagnetyczny będzie miał wartość stałą w czasie
0
3
em
sin
I
I
M
ϕ
⋅
⋅
⋅
−
=
m
(5.16)
Interpretację kąta
0
ϕ
podano już poprzednio. Określa on położenie kątowe osi magnetycznej cewki
‘3’ w stosunku do osi magnetycznej cewki ‘1’ w chwili gdy prąd w cewce ‘1’ osiąga wartość
maksymalną. Należy zauważyć, że w tych warunkach zasilania moment elektromagnetyczny nie ma
składowej przemiennej, czyli, że przetwarzanie energii jest poprawne. Warunek stabilności punktów
równowagi statycznej dla tego przypadku jest analogiczny jak dla przetwornika analizowanego
poprzednio, gdyż wzór na moment elektromagnetyczny jest z matematycznego punku widzenia
identyczny.
8
Jeżeli zamienimy prądy zasilające cewek ‘1’ oraz ‘2’, tj. gdy
)
sin(
I
e
1
t
i
⋅
Ω
⋅
=
,
)
(
cos
I
e
2
t
i
⋅
Ω
⋅
=
,
3
3
I
=
i
wówczas wyrażenie na moment elektromagnetyczny przyjmie postać
(
)
=
ϕ
⋅
⋅
Ω
+
ϕ
⋅
⋅
Ω
−
⋅
⋅
⋅
=
cos
)
(
cos
sin
)
(
sin
I
I
M
e
e
3
em
t
t
m
)
cos(
I
I
M
e
3
ϕ
+
⋅
Ω
⋅
⋅
⋅
=
t
co oznacza, że moment elektromagnetyczny będzie stały w czasie przy przeciwnej prędkości kątowej
e
m
Ω
−
=
Ω
, tj. gdy
0
e
ϕ
+
⋅
Ω
−
=
ϕ
t
i będzie wynosił
0
3
em
cos
I
I
M
ϕ
⋅
⋅
⋅
=
m
(5.17)
Zamiana prądów w cewkach spowodowała zmianę kierunku obrotów, przy których może się pojawić
moment elektromagnetyczny o wartości średniej różnej od zera, lecz przetwarzanie energii będzie
także poprawne, gdyż nie wystąpi składowa przemienna momentu elektromagnetycznego.
Należy jednak zauważyć, że przy wyliczaniu momenty elektromagnetycznego przyjęto, że
indukcyjności wzajemne cewek na części stałej i cewki na części obrotowej zmieniają się
sinusoidalnie. Można łatwo prześledzić, że gdyby te indukcyjności nie zmieniały się dokładnie
sinusoidalnie lub prądy cewek nie spełniałyby podanych powyżej warunków, wówczas na pewno
pojawiłaby się w momencie elektromagnetycznym składowa przemienna i przetwarzanie nie byłoby
idealne. Z tego należy wysnuć bardzo ważny wniosek, że w celu idealnego przetwarzania energii
przez ten przetwornik należy spełnić dwie zasdy:
•
cewki przetwornika powinny być rozłożone w żłobkach tak, aby ich indukcyjności wzajemne
zmieniały się w funkcji kąta położenia jak w macierzy indukcyjności przyjętej do obliczeń
momentu,
•
prądy cewek powinny spełniać ściśle określone warunki.
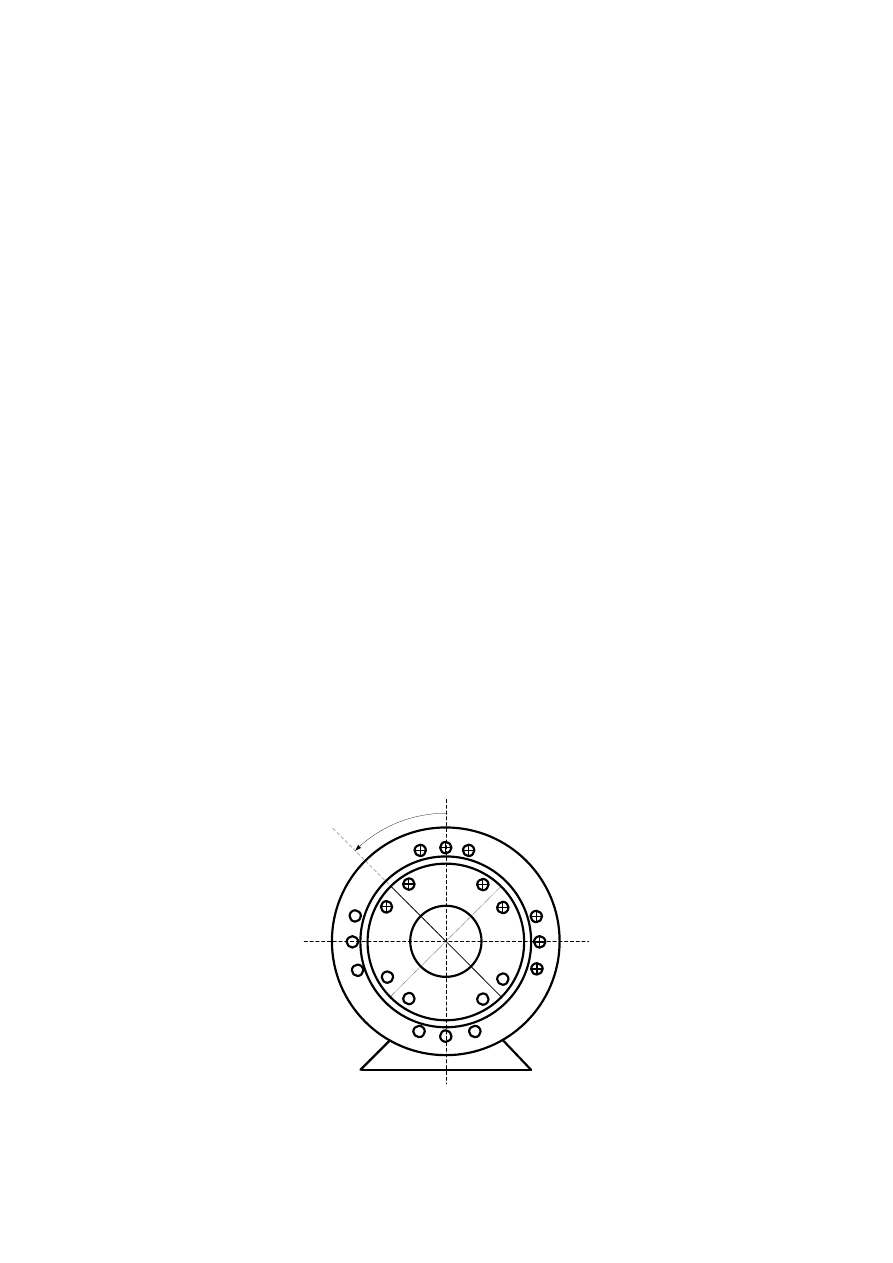
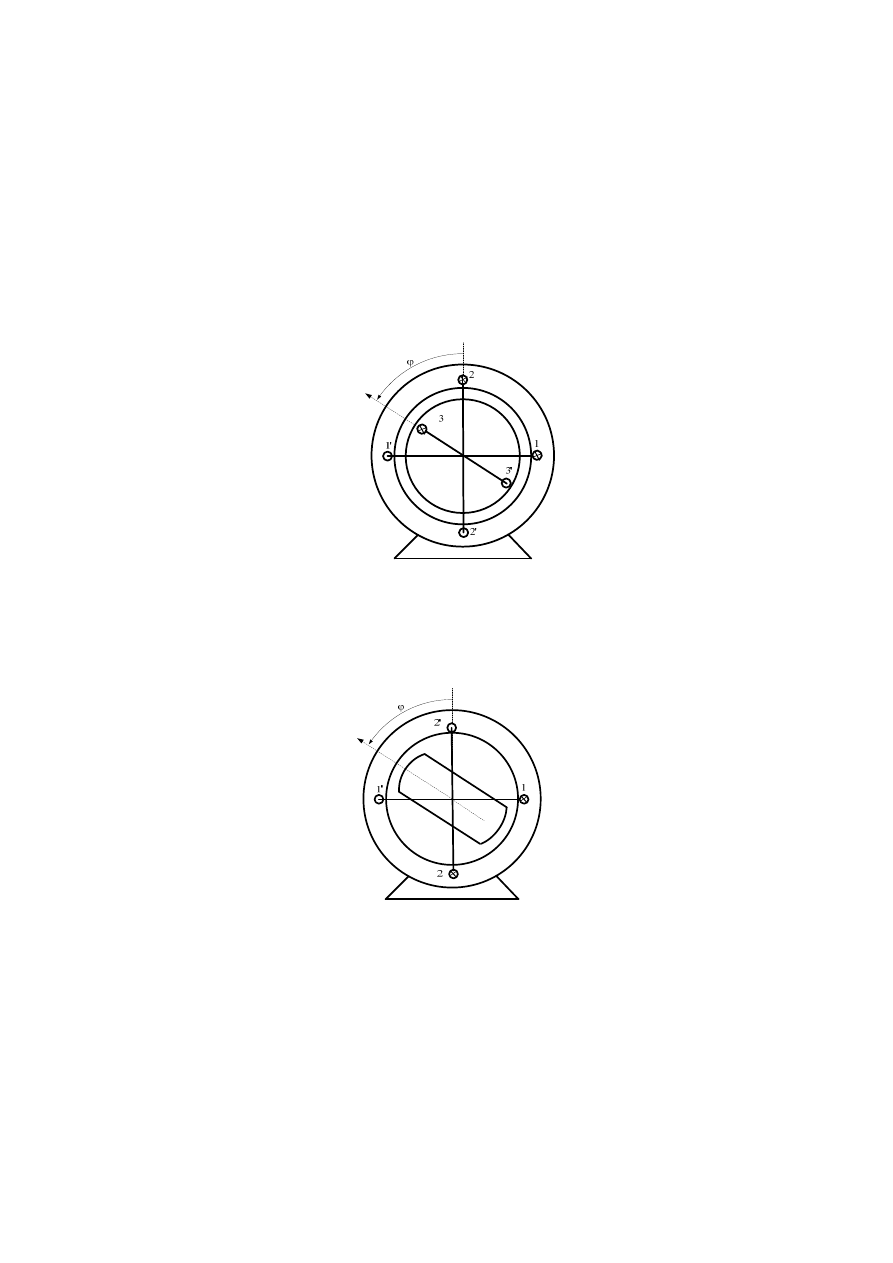
Podobne właściwości procesu przetwarzania energii można osiągnąć w przetworniku o czterech
cewkach: dwóch jednakowych na części nieruchomej umieszczonych magnetycznie prostopadle oraz
dwóch jednakowych na części obrotowej, także umieszczonych prostopadle, tj. tak, aby nie sprzęgały
się magnetycznie.
ϕ
1
2'
3
4'
1'
2
3'
4
Rys. 5.5. Przetwornik o czterech cewkach

9
Równania takiego przetwornika mają postać
+
⋅
ϕ
⋅
ϕ
⋅
−
ϕ
⋅
ϕ
⋅
ϕ
⋅
ϕ
⋅
ϕ
⋅
−
ϕ
⋅
r2
r1
s2
s1
r
r
s
s
L
0
cos
M
sin
M
0
L
sin
M
cos
M
cos
M
sin
M
L
0
sin
M
cos
M
0
L
d
d
i
i
i
i
t
=
⋅
r2
r1
s2
s1
r2
r1
s2
s1
r
r
s
s
R
0
0
0
0
R
0
0
0
0
R
0
0
0
0
R
u
u
u
u
i
i
i
i
(5.18a)
[
]
⋅
ϕ
⋅
−
ϕ
⋅
ϕ
⋅
−
ϕ
⋅
−
⋅
+
=
ϕ
+
ϕ
r2
r1
s2
s1
z
2
2
sin
M
cos
M
cos
M
sin
M
d
d
D
d
d
J
i
i
i
i
m
t
t
(5.18b)
Założono w nich sinusoidalny charakter zmienności pary cewek ‘1’ i ‘3’ oraz uwzględniono relacje
między pozostałymi indukcyjnościami wzajemnymi. Moment elektromagnetyczny tego przetwornika
można przedstawić w postaci
(
)
(
)
(
)
ϕ
⋅
⋅
+
⋅
−
ϕ
⋅
⋅
−
⋅
⋅
=
sin
cos
M
r2
s2
r1
s1
s1
r2
s2
r1
em
i
i
i
i
i
i
i
i
m
(5.19)
Jeżeli w tym przetworniku wymusimy przepływ prądów
)
(
cos
I
s
s
s1
t
i
⋅
Ω
⋅
=
)
(
sin
I
s
s
s2
t
i
⋅
Ω
⋅
=
)
(
cos
I
r
r
r1
t
i
⋅
Ω
⋅
=
)
(
sin
I
r
r
r2
t
i
⋅
Ω
⋅
=
wówczas wyrażenie na moment elektromagnetyczny przyjmie postać
(
)
)
)
(
sin
I
I
M
r
s
r
s
em
ϕ
−
⋅
Ω
−
Ω
⋅
⋅
⋅
=
t
m
(5.20)
Z tego wyrażenia wynika, że moment elektromagnetyczny będzie miał wartość stałą w czasie, gdy
0
r
s
)
(
ϕ
+
⋅
Ω
−
Ω
=
ϕ
t
, tj. przy prędkości kątowej
r
s
m
Ω
−
Ω
=
Ω
0
r
s
em
sin
I
I
M
ϕ
⋅
⋅
⋅
−
=
m
(5.21)
Są to warunki, przy których przetwornik z Rys. 5.4 może idealnie przetwarzać energię.
Można wykazać, że także dla poniższych zbiorów par prądów:
)
(
sin
I
s
s
s1
t
i
⋅
Ω
⋅
=
,
)
(
cos
I
s
s
s2
t
i
⋅
Ω
⋅
=
)
(
sin
I
r
r
r1
t
i
⋅
Ω
⋅
=
,
)
(
cos
I
r
r
r2
t
i
⋅
Ω
⋅
=
)
(
cos
I
s
s
s1
t
i
⋅
Ω
⋅
=
,
)
(
sin
I
s
s
s2
t
i
⋅
Ω
⋅
=
)
(
sin
I
r
r
r1
t
i
⋅
Ω
⋅
=
,
)
(
cos
I
r
r
r2
t
i
⋅
Ω
⋅
=
)
(
sin
I
s
s
s1
t
i
⋅
Ω
⋅
=
,
)
(
cos
I
s
s
s2
t
i
⋅
Ω
⋅
=
)
(
cos
I
r
r
r1
t
i
⋅
Ω
⋅
=
,
)
(
sin
I
r
r
r2
t
i
⋅
Ω
⋅
=
przetwarzanie energii jest idealne przy odpowiednich prędkościach kątowych.
Powyższe dwa przykłady ilustrują ideę budowy przetworników oraz tworzenia warunków dla
idealnego przetwarzania energii. Istnieje cała klasa takich przetworników, które są powszechnie
stosowane zarówno do generacji energii elektrycznej jak i jej przetwarzania na energię mechaniczną.
10
Przykłady
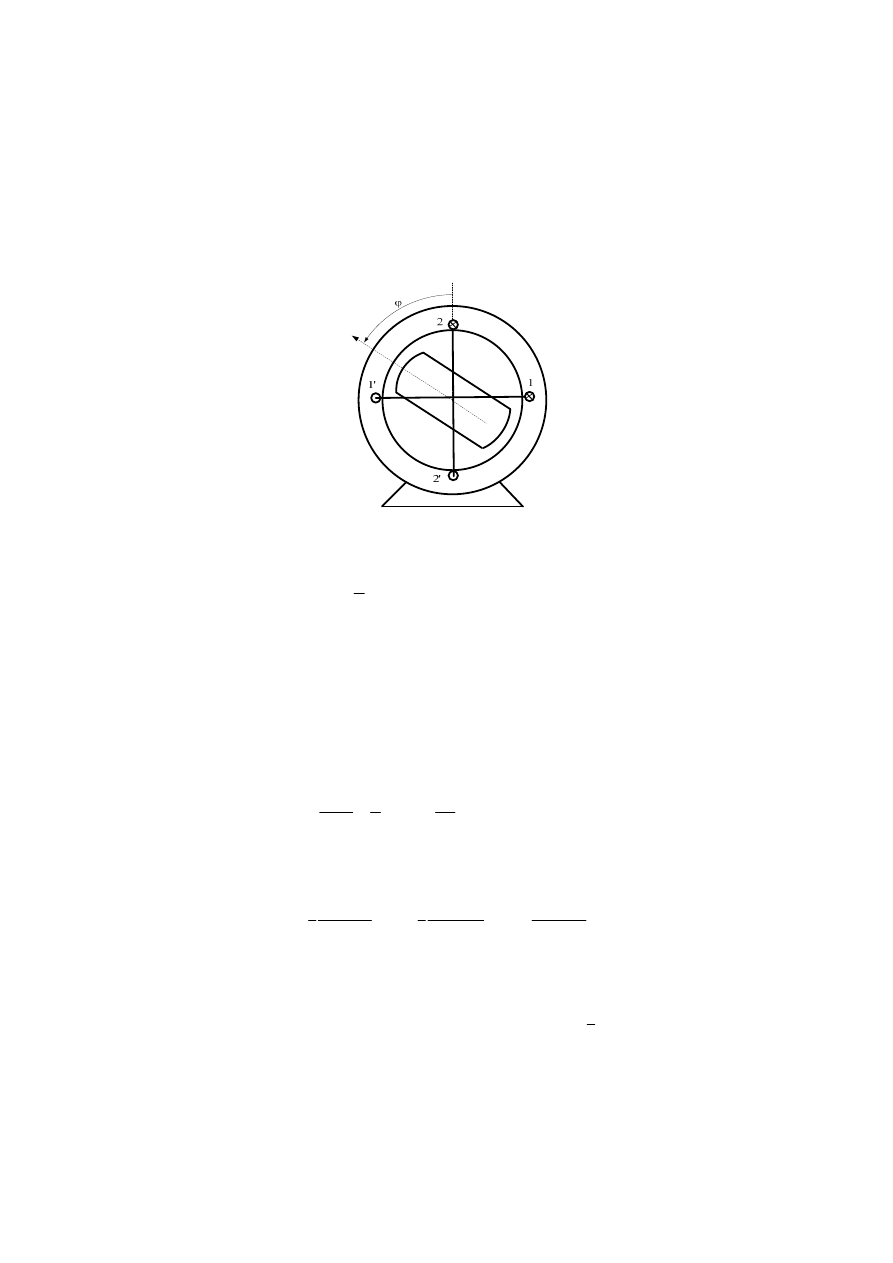
P. 5.1/. Dla przetwornika wydatno biegunowego 2-fazowego zapisać formę kwadratową ko-energii.
Podać zależność na moment elektromagnetyczny oraz wyznaczyć wartość średnią momentu
elektromagnetycznego przy zasilaniu prądowym w postaci:
t
I
i
s
m
Ω
=
cos
1
;
t
I
i
s
m
Ω
=
sin
2
;
gdy
0
ϕ
+
Ω
=
ϕ
t
r
. Określić relacje pomiędzy prędkością obrotową
r
Ω
a pulsacją zasilania
s
Ω
, aby mogło zachodzić przetwarzania energii.
Forma kwadratowa ko-energii uzwojeń zapisana zgodnie z wcześniejszymi rozważaniami
[
]
⋅
ϕ
ϕ
ϕ
ϕ
⋅
=
2
1
2
,
2
,1
2
,2
1
,1
1
2
1
ko
)
(
L
)
(
L
)
(
L
)
(
L
2
1
i
i
i
i
E
gdzie indukcyjności
)
cos(2
L
L
)
(
L
0
1,1
ϕ
⋅
∆
+
=
ϕ
;
)
cos(2
L
L
)
(
L
0
2,2
ϕ
⋅
∆
−
=
ϕ
;
)
(2
sin
L
)
(
L
)
(
L
2,1
1,2
ϕ
⋅
∆
=
ϕ
=
ϕ
Wyrażenie przedstawiające moment elektromagnetyczny
[
]
ϕ
ϕ
ϕ
ϕ
ϕ
∂
∂
=
ϕ
∂
∂
=
2
1
2
,
2
,1
2
,2
1
,1
1
2
1
ko
em
)
)
(
L
)
(
L
)
(
L
)
(
L
(
2
1
i
i
i
i
E
m
Po wykonaniu formalnych przekształceń matematycznych
)
2
cos(
L
2
)
2
sin(
L
)
(
)
2
sin(
L
)
(
)
(
L
)
(
)
(
L
)
(
)
(
L
2
1
2
2
2
1
2
1
,2
1
2
2
,2
2
2
1
2
1
,1
1
2
1
em
ϕ
∆
+
ϕ
∆
+
ϕ
∆
−
=
=
ϕ
∂
ϕ
∂
+
ϕ
∂
ϕ
∂
+
ϕ
∂
ϕ
∂
=
i
i
i
i
i
i
i
i
m
Podstawiając założone zależności opisujące wymuszenia prądowe oraz prędkość obrotową oraz
wykorzystując
zależność
trygonometryczną
)]
sin(
)
[sin(
cos
sin
2
1
2
1
2
1
2
1
α
−
α
+
α
−
α
=
α
α
otrzymujemy
11
]
2
)
(
2
sin[
L
)}
2
2
2
sin(
)
2
2
2
sin(
)
2
2
2
sin(
)
2
2
2
sin(
-
{
L
}
)
2
2
cos(
)
2
sin(
)
2
cos(
)
2
2
sin(
L{-
}
)
2
2
cos(
)
cos(
)
sin(
2
]
)
(cos
)
)[(sin
2
2
sin(
L{
)
2
2
cos(
L
)
sin(
)
cos(
2
)
2
2
sin(
L
)
sin
(
)
2
2
sin(
L
)
cos
(
0
2
0
0
0
0
2
1
2
0
0
2
0
2
2
0
2
0
0
2
0
2
em
ϕ
+
Ω
−
Ω
∆
−
=
=
ϕ
+
Ω
+
Ω
+
ϕ
−
Ω
−
Ω
+
+
Ω
+
ϕ
+
Ω
−
Ω
−
ϕ
+
Ω
∆
=
=
ϕ
+
Ω
Ω
+
Ω
ϕ
+
Ω
∆
=
=
ϕ
+
Ω
Ω
Ω
+
+
Ω
−
Ω
ϕ
+
Ω
∆
=
=
ϕ
+
Ω
∆
Ω
Ω
+
+
ϕ
+
Ω
∆
Ω
+
ϕ
+
Ω
∆
Ω
−
=
t
I
t
t
t
t
t
t
t
t
I
t
t
t
t
I
t
t
t
t
t
t
I
t
t
I
t
I
t
t
I
t
t
I
m
s
r
m
r
s
r
s
s
r
s
r
m
r
s
s
r
m
r
s
s
s
s
r
m
r
s
m
s
m
r
s
m
r
s
m
Aby
mogło
dochodzić
do
przetwarzania
energii
wartość
wytwarzanego
momentu
elektromagnetycznego średniego
)
(
sredni
em
m
musi byś różna od zera. Sytuacja taka może mieć miejsce
jedynie w przypadku, gdy
s
r
Ω
=
Ω
i wówczas
)
2
sin(
L
0
2
em
ϕ
∆
−
=
m
I
m
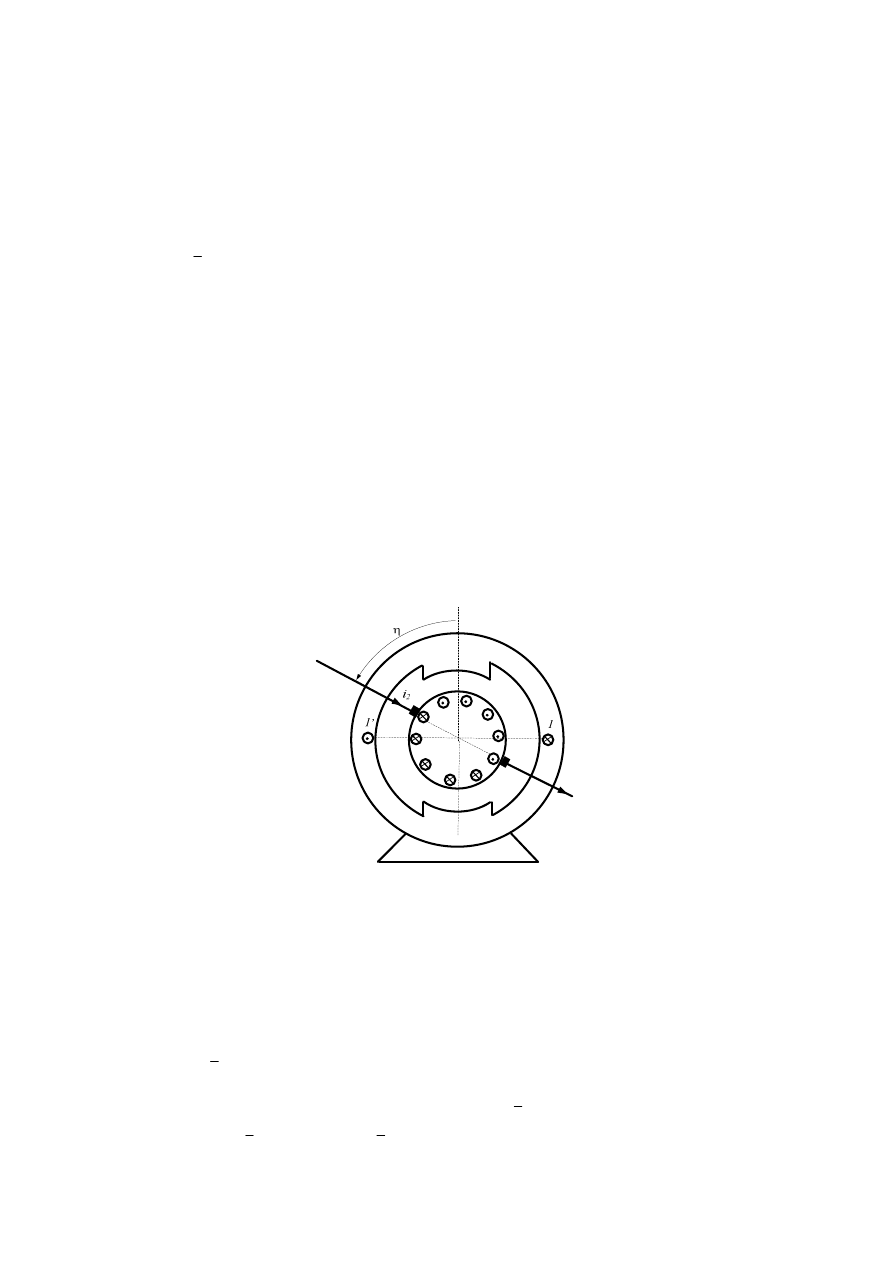
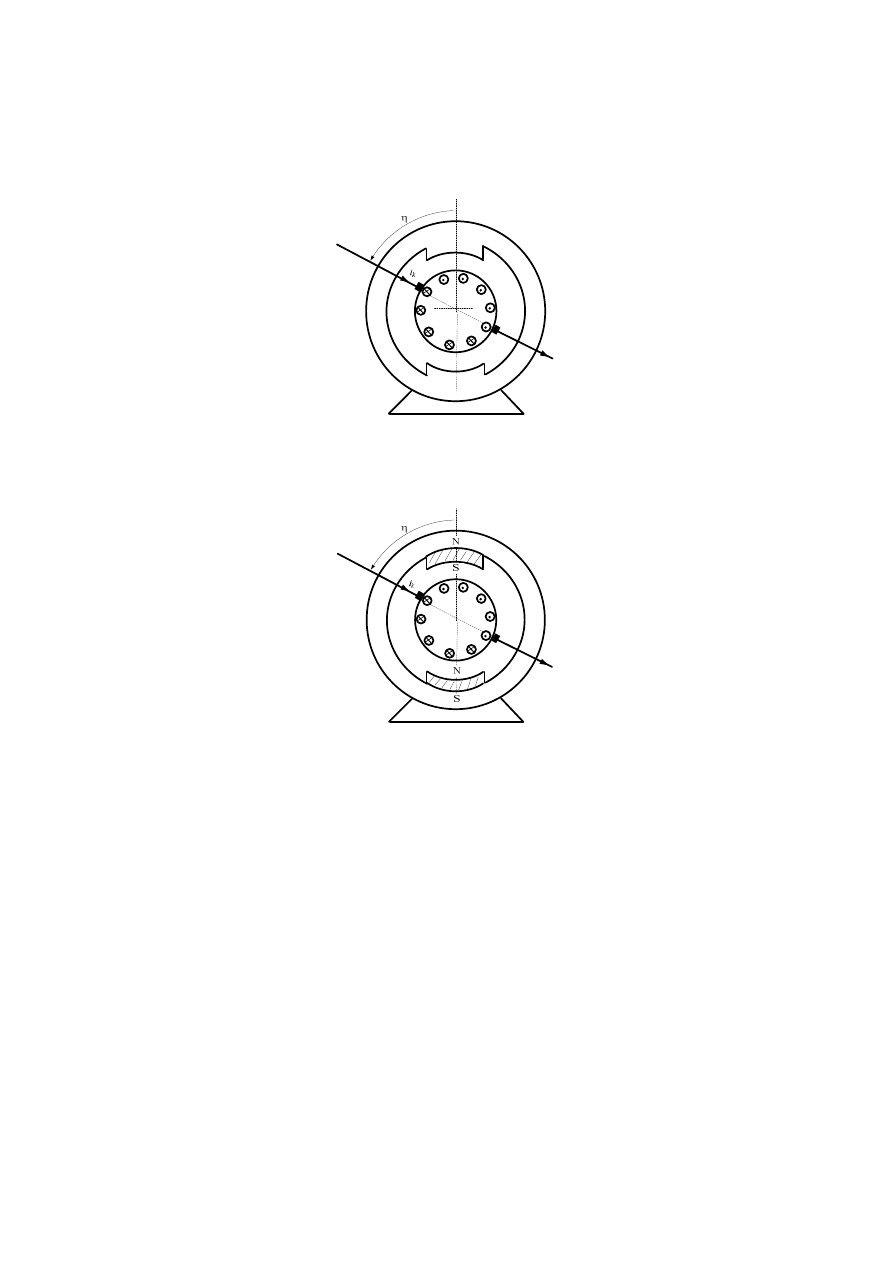
P. 5.2/. Zapisać wyrażenie na moment elektromagnetyczny dla przetwornika z komutatorami przy
zasilaniu prądowym
)
cos(
1
α
+
Ω
=
t
I
i
s
;
t
I
i
r
Ω
=
cos
2
. Określić kąt przesunięcia fazowego
α
, dla którego wartość wytwarzanego momentu elektromagnetycznego średniego
)
(
sredni
em
m
jest maksymalna przy założeniu, że ustawienie szczotek jest w strefie neutralnej
2
/
π
=
η
.
Moment elektromagnetyczny przetwornika z komutatorem dla ustawienia szczotek w strefie neutralnej
2
/
π
=
η
przy przyjętym zgodnie z powyższym rysunkiem zastrzałkowaniu kierunków prądów ma
postać
2
1
M
i
i
m
em
⋅
⋅
=
Po podstawieniu założonych wymuszeń prądowych oraz wykorzystaniu zależność trygonometrycznej
)]
cos(
)
[cos(
cos
cos
2
1
2
1
2
1
2
1
α
−
α
+
α
−
α
=
α
α
otrzymamy
)
2
cos(
M
)
cos(
M
)]
2
cos(
)
[cos(
M
cos
)
cos(
M
2
1
2
1
2
1
α
+
Ω
⋅
⋅
+
α
⋅
⋅
=
=
α
+
Ω
+
α
⋅
⋅
=
Ω
⋅
α
+
Ω
⋅
⋅
=
t
I
I
I
I
t
I
I
t
t
I
I
m
r
s
r
s
r
s
r
s
em
12
Powyższe wyrażenie opisujące moment elektromagnetyczne posiada dwie składowe: stałą oraz
zmienną z tym, że wartość składowej stałej jest maksymalna dla kąta przesunięcia fazowego pomiędzy
prądami
0
=
α
. Wynika z tego, że uzwojenia należy połączyć szeregowo i wymusić płynące prądy z
jednego wspólnego źródła. Płynący prąd przez uzwojenia będzie wówczas równy
m
r
s
I
I
I
=
=
a
moment elektromagnetyczny
)
2
cos(
M
M
2
1
2
2
1
t
I
I
I
m
r
s
m
em
Ω
⋅
⋅
+
⋅
=
Wartość średnia momentu elektromagnetycznego wynosi wtedy
2
2
1
)
(
M
m
sredni
em
I
m
⋅
=
.
Zadania
Zad. 5.1/. Dla przetwornika zapisać zależności momentu elektromagnetycznego od kąta
ϕ
, przy
założeniu, że
I
i
=
= const. Określić stabilne położenia równowagi statycznej dla obciążenia
momentem zewnętrznym
z
m
=const. (działającym zgodnie z
ϕ
). Określić strefy stabilnych
położeń równowagi trwałej.
Zad. 5.2/. Dla przetwornika zapisać zależności momentu elektromagnetycznego od kąta
ϕ
, przy
założeniu, że
s
I
i
=
1
= const.;
r
I
i
=
2
= const. Określić stabilne położenia równowagi
statycznej dla obciążenia momentem zewnętrznym
z
m
=const. (działającym zgodnie z
ϕ
).
Określić strefy stabilnych położeń równowagi trwałej.
13
Zad. 5.3/. Wiedząc, że moment elektromagnetyczny przetwornika o ruchu obrotowym jest dany
wzorem
ϕ
⋅
−
=
2
sin
2
2
L
i
m
em
, wyznaczyć wartość średnią momentu, gdy
t
I
i
Ω
=
cos
, a
prędkość kątowa jest stała (
0
ϕ
+
Ω
=
ϕ
t
). Narysować przekrój takiego przetwornika.
Zad. 5.4/. Dla przetwornika zapisać formę kwadratową ko-energii. Podać zależność na moment
elektromagnetyczny oraz wyznaczyć wartość średnią momentu elektromagnetycznego przy
zasilaniu prądowym w postaci:
t
I
i
s
m
Ω
=
cos
1
;
)
cos(
2
α
+
Ω
=
t
I
i
s
m
;
r
I
i
=
3
= const, gdy
0
ϕ
+
Ω
=
ϕ
t
r
. Określić relacje
pomiędzy prędkością obrotową
r
Ω
a pulsacją zasilania
s
Ω
, aby mogło zachodzić
przetwarzania energii oraz podać wartość kąta przesunięcia fazowego
α
dla którego
)
(sredni
em
m
jest największy.
Zad. 5.5/. Dla przetwornika zapisać formę kwadratową ko-energii. Podać zależność na moment
elektromagnetyczny oraz wyznaczyć wartość średnią momentu elektromagnetycznego przy
zasilaniu prądowym w postaci:
t
I
i
s
m
Ω
=
cos
1
;
t
I
i
s
m
Ω
=
sin
2
; gdy
0
ϕ
+
Ω
=
ϕ
t
r
. Określić relacje pomiędzy prędkością
obrotową
r
Ω
a pulsacją zasilania
s
Ω
, aby mogło zachodzić przetwarzania energii.
Zad. 5.6/. Moment elektromagnetyczny przetwornika jest dany zależnością
ϕ
⋅
⋅
⋅
−
=
2
sin
2
1
i
i
M
m
em
.
Wyznaczyć wartość średnią momentu, gdy
t
I
i
Ω
⋅
=
cos
1
1
,
const
I
i
=
=
2
2
, a prędkość
kątowa jest stała (
0
ϕ
+
Ω
=
ϕ
t
). Narysować przekrój takiego przetwornika.
14
Zad. 5.7/. Wyznaczyć składową stałą oraz zmienną momentu elektromagnetycznego dla przetwornika
z komutatorami przy zasilaniu prądowym
)
cos(
α
+
Ω
=
t
I
i
s
k
. Określić kąty ustawienia
szczotek
η
dla których wartości wytwarzanego momentu elektromagnetycznego średniego
(
)
(sredni
em
m
) są maksymalne.
Zad. 5.8/. Wyznaczyć wartość średnią momentu elektromagnetycznego
)
( sredni
em
m
dla przetwornika z
komutatorem
wzbudzanego
magnesami
trwałymi
przy
zasilaniu
prądowym
)
cos(
α
+
Ω
=
t
I
i
s
k
zakładając, że ustawienie szczotek
η
jest w strefie neutralnej
2
/
π
=
η
.
Wyszukiwarka
Podobne podstrony:
5. Ocena procesu przetwarzania energii
Charakteryzowanie procesów przetwarzania energii elektrycznej
Charakteryzowanie procesów przetwarzania energii elektrycznej
Ocena procesow przetwarzania sluchowego
Wpływ procesów wytwarzania energii na środowisko przyrodnicze
paliwa i przetwarzaie energii 6
Ocena procesu kompostowania z udziałem odpadów poch zwierz
Nowe technologie w produkcji żywności wygodnej 1, PRAWO ŻYWNOŚCIOWE, Ogólna technologia żywności, Pr
SCIAGA reczna, Maszyna jest to urządzenie techniczne zawierające mechanizmy we wspólnym kadłubie słu
paliwa i przetwarzaie energii 5
paliwa i przetwarzaie energii 3 Nieznany
1 OCENA WŁAŚCIWOŚCI PRZETWÓRCZYCH TWORZYW SZTUCZNYCH
2. Reklama w procesie przetwarzania informacji
paliwa i przetwarzaie energii 7
miejsce biomasy drzewnei w procesach pozyskiwania energii ze zrodel odnawialnych
więcej podobnych podstron