
Architektura komputerów
Procesory superskalarne
Procesor superskalarny
●
Termin superskalarny określa
procesory, które mogą wykonywać dwie
lub więcej instrukcje skalarne
(arytmetyczne, logiczne) jednocześnie.
●
Rozwiązanie to stosuje się w
nowoczesnych procesorach w celu
zwiększenia wydajności.

Ograniczenia
Następujące ograniczenia uniemożliwiają
równoległe wykonywanie instrukcji:
●
zależność danych
●
zależność proceduralna
●
konflikt dotyczący zasobów
●
zależność wyjściowa
●
antyzależność

Zależność danych
add r1,r2
mov r3,r1
Drugi rozkaz może być pobrany i zdekodo-
wany, ale nie może być wykonany zanim
nie zostanie wykonany pierwszy rozkaz,
ponieważ potrzebne są dane tworzone
przez pierwszy.

Zależności proceduralne
●
Obecność rozgałęzień w sekwencji
rozkazów ma jeszcze większy wpływ na
potok superskalarny, niż na
pojedynczy.
●
Straty spowodowane przez
rozgałęzienie mogą być jeszcze
większe, ponieważ więcej jest
wykonywane w jednostce czasu.

Konflikt dotyczący zasobów
●
Konflikt dotyczący zasobów polega na
jednoczesnym rywalizowaniu dwóch
instrukcji o te same zasoby.
Przykładami takich zasobów są:
–
pamięć
–
magistrale
–
kanały wejścia-wyjścia
●
Takie konflikty mogą być rozwiązywane
przez zwielokratnianie zasobów lub
odpowiednią organizację.
Zależność wyjściowa
●
W przykładowym kodzie:
R3:=R3 op R5
(I1)
R4:=R3+1
(I2)
R3:=R5+1
(I3)
R7:=R3 op R4
(I4)
●
Rozkaz I3 nie jest zależny od I1, ale nie
może być wykonany przed nim, gdyż
wówczas I4 będzie miał niewłaściwą
zawartość rejestru R3.

Antyzależność
R3:=R3 op R5
(I1)
R4:=R3 + 1
(I2)
R3:=R5 + 1
(I3)
●
Wykonywanie rozkazu I3 nie może być
zakończone, zanim nie zostanie rozpoczęte
wykonywanie rozkazu I2 i nie zostaną
pobrane jego argumenty.
●
I3 aktualizuje rejestr R3, który jest źródłem
argumentu dla rozkazu I2.
●
Ograniczenie jest podobne do zależności
danych, lecz na odwrót: drugi rozkaz
niszczy wartość używaną przez pierwszy.
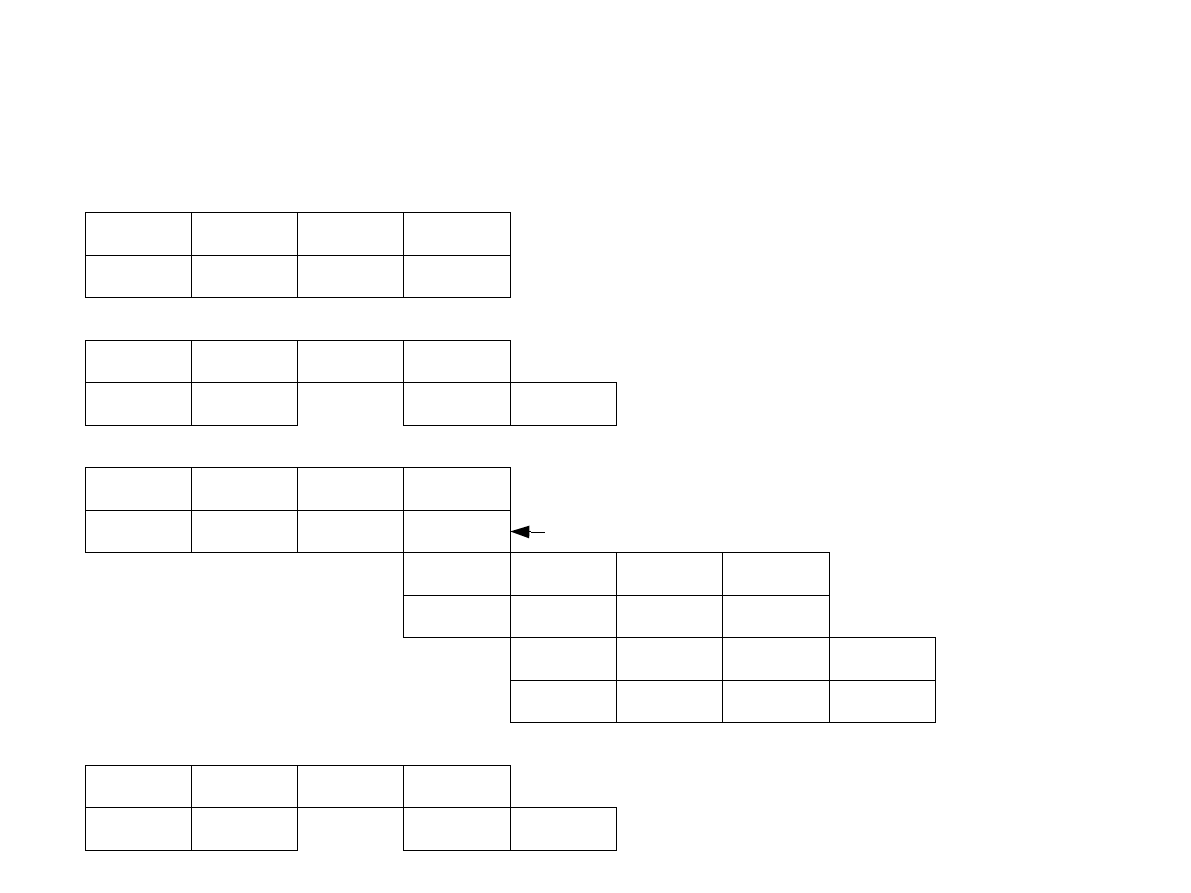
Wpływ zależności
Pobieranie
rozkazu
Dekodo-
wanie
Wykony-
wanie
Zapis
opóźniony
Pobieranie
rozkazu
Dekodo-
wanie
Wykony-
wanie
Zapis
opóźniony
r1
r2
Brak zależności
Pobieranie
rozkazu
Dekodo-
wanie
Wykony-
wanie
Zapis
opóźniony
Pobieranie
rozkazu
Dekodo-
wanie
Wykony-
wanie
Zapis
opóźniony
r1
r2
Zależność danych
(r2 wykorzystuje dane
obliczone przez r1)
Pobieranie
rozkazu
Dekodo-
wanie
Wykony-
wanie
Zapis
opóźniony
Pobieranie
rozkazu
Dekodo-
wanie
Wykony-
wanie
Zapis
opóźniony
r1
r2
Zależność proceduralna
Pobieranie
rozkazu
Dekodo-
wanie
Wykony-
wanie
Zapis
opóźniony
Pobieranie
rozkazu
Dekodo-
wanie
Wykony-
wanie
Zapis
opóźniony
r3
r4
Pobieranie
rozkazu
Dekodo-
wanie
Wykony-
wanie
Zapis
opóźniony
Pobieranie
rozkazu
Dekodo-
wanie
Wykony-
wanie
Zapis
opóźniony
r1
r2
Konflikt dotyczący
zasobów
Pobieranie
rozkazu
Dekodo-
wanie
Wykony-
wanie
Zapis
opóźniony
Pobieranie
rozkazu
Dekodo-
wanie
Wykony-
wanie
Zapis
opóźniony
r5
r6
rozgałęzienie

Kolejność wykonania
rozkazów
●
Kolejne wydawanie połączone z
kończeniem w zmienionej kolejności.
–
Jeżeli rozkaz wykonuje się dłużej niż jeden cykl,
jego wyniki mogą być osiągalne później, niż
kolejnego rozkazu.
●
Zmieniona kolejność wydawania i
kończenia.
–
Wykorzystujemy bufor zdekodowanych
rozkazów zwany oknem rozkazu.
–
Jednostka wykonawcza pobiera dowolny rozkaz
z okna pod warunkiem spełnienia ograniczeń.

Przemianowanie rejestrów
Metoda eliminowania konfliktów
antyzależności i zależności wyjściowej
przez powielenie zasobów.
R3
b
:=R3
a
op R5
a
R4
b
:=R3
b
+ 1
R3
c
:=R5
a
+ 1
R7
b
:=R3
c
op R4
b
Użycie innego fizycznego rejestru R3c w rozkazie
I3 zapobiega antyzależnośći w drugim rozkazie
oraz zależności wyjściowej w pierwszym. Dzięki
temu I3 może być wykonany natychmiast.

Procesor PowerPC 620
●
Procesor PowerPC 620 zawiera sześć
niezależnych jednostek wykonawczych:
–
jednostkę rozkazów
–
trzy jednostki całkowitoliczbowe
–
jednostkę ładowania/zapisu
–
jednostkę zmiennopozycyjną
●
Procesor może jednocześnie
wykonywać do 4 rozkazów: 3
całkowitoliczbowe i 1
zmiennopozycyjny.

PowerPC 620 cd
●
Procesor zawiera układy przewidywania
rozgałęzień, bufory przemianowania
rejestrów oraz stacje rezerwowe
wewnątrz jednostek wykonawczych.
●
Procesor ten może wykonywać do 4
nierozstrzygniętych rozkazów
rozgałęzień.
●
Przewidywanie skoków oparte jest na
tablicy historii zawierającej 2048
zapisów. Skuteczność przewidywań: 90%.
Wyszukiwarka
Podobne podstrony:
ArchKomp CISC RISC Wyklad PKos Stud
Mat dla stud 2
Wyklad 1' stud
Metabolizm kkw tł stud
archkomp 08
strukturalnaMinuchina stud
Tętnice szyjne sem dla stud II
ZO NST 14 ĆW1CZ 1, 2 STUD F F3
kosztkapitału4 stud
6 Mielizna stud nowy
CEMENTY stud
Audyt personalny 1a stud
więcej podobnych podstron