1
8. Dynamika manipulatora
Masa – wielkość fizyczna charakteryzująca oddziaływanie grawitacyjne i
bezwładność ciała. Bezwładność to zdolność do przeciwstawiania się zmianom prędkości w
ruchu postępowym. Podzielmy myślowo ciało na nieskończoną ilość elementów (punktów
materialnych) i niech
ρ
oznacza gęstość ciała w punkcie, V objętość ciała, wówczas masę
ciała m wyznaczyć można z zależności
(
)
m
z
y
x
z
y
x
V
=
∫
d
d
d
,
,
ρ
(1)
Równanie (1) można zapiać także w następującej postaci
m
v
V
=
∫
d
ρ
(2)
gdzie: dv – elementarna objętość (dv = dxdydz),
ρ
=
ρ
(x, y, z) – jw. funkcja gęstości ciała.
Ś
rodek masy to punkt przyłożenia wypadkowej sił ciężkości działających na ciało.
Ś
rodek masy obiektu ciągłego ma współrzędne (x
c
, y
c
, z
c
) określone jako
∫
∫
∫
=
=
=
V
c
V
c
V
c
v
z
m
z
v
y
m
y
v
x
m
x
d
1
,
d
1
,
d
1
ρ
ρ
ρ
(3)
Równanie (3) można zapiać także w następującej postaci
∫
∫
∫
=
=
=
m
c
m
c
m
c
m
z
m
z
m
y
m
y
m
x
m
x
d
1
,
d
1
,
d
1
(4)
gdzie dm =
ρ
dv opisuje nieskończenie małą masę punktu materialnego o współrzędnych
(x, y, z). Równania (4) zapisane w zwarty sposób ma postać
∫
=
m
c
m
r
m
r
d
1
(5)
2
gdzie: r
c
– wektor opisujący środek masy w trójwymiarowym układzie współrzędnych,
r – wektor opisujący położenie punktu ciała.
Moment bezwładności wielkość fizyczna skalarna charakteryzująca bezwładność
ciała w ruchu obrotowym dookoła danej osi. Matematycznie moment bezwładności względem
osi zdefiniowany jest następująco
(
)
(
)
(
)
∫
∫
∫
+
=
+
=
+
=
m
zz
m
yy
m
xx
m
y
x
I
m
z
x
I
m
z
y
I
d
,
d
,
d
2
2
2
2
2
2
(6)
Moment dewiacji (inaczej iloczyn inercji) – moment bezwładności określony w
prostokątnym układzie współrzędnych wzorami
∫
∫
∫
=
=
=
=
=
=
m
zy
yz
m
zx
xz
m
yz
xy
m
z
y
I
I
m
z
x
I
I
m
y
x
I
I
d
,
d
,
d
(7)
Macierz inercji (inaczej macierz bezwładności lub tensor bezwładności) – macierz
3x3 zawierająca momenty bezwładności i momenty dewiacji, względem prostokątnego
układu współrzędnych, zapisane w postaci
−
−
−
−
−
−
=
zz
zy
zx
yz
yy
yx
xz
xy
xx
I
I
I
I
I
I
I
I
I
Ι
(8)
Macierz inercji zawiera sześć niezależnych wielkości. Dla danego ciała zależą one od pozycji
i orientacji układu odniesienia ciała. Układ odniesienia można tak dobrać, aby momenty
dewiacji były równe zero. Wówczas osie układu odniesienia nazywane są osiami głównymi, a
odpowiadające im momenty bezwładności – głównymi momentami bezwładności.
Zadanie 1
a)
Znajdź macierz inercji prostopadłościanu o jednorodnej gęstości
ρ
względem układu {0}
pokazanego na rys. 1.
b)
Wyznacz analitycznie środek masy prostopadłościanu z rys. 1.
c)
Znajdź macierz inercji prostopadłościanu z rys. 1 względem układu współrzędnych {1},
powstałego w wyniku przesunięcia układu {0} do punktu środka masy.
3
l
w
h
0
X
0
Y
0
Z
{0}
Rys. 1. Ciało o jednorodnej gęstości
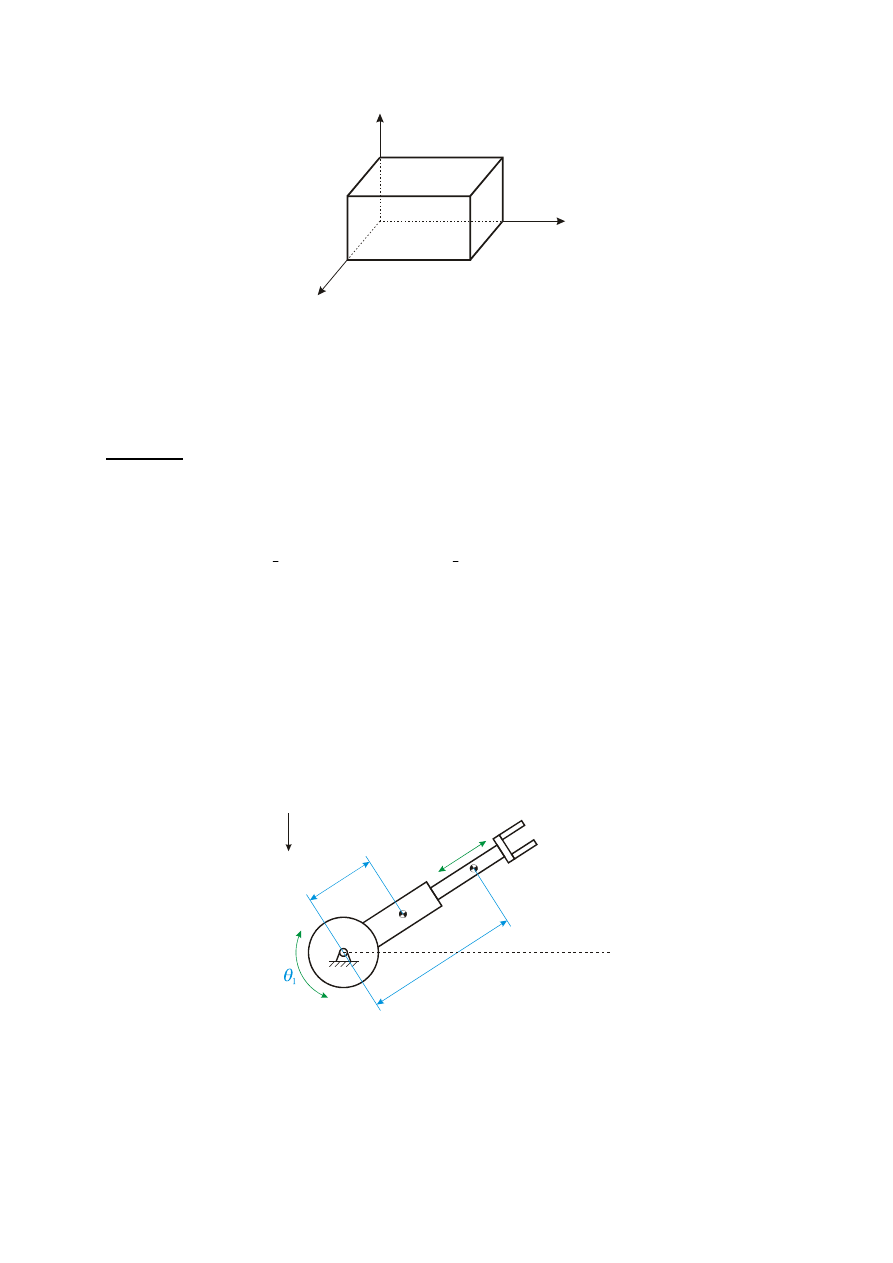
Zadanie 2
Macierze inercji członów manipulatora OP przedstawionego na rys. 2 są następujące
=
1
1
1
1
1
0
0
0
0
0
0
zz
yy
xx
I
I
I
I
,
=
2
2
2
2
2
0
0
0
0
0
0
zz
yy
xx
I
I
I
I
a całkowite masy są równe m
1
i m
2
. Środek masy członu 1 jest umieszczony w odległości l
1
od osi pary obrotowej, a środek masy członu 2 jest położony w odległości d
2
od osi pary
obrotowej. Wyznacz równania ruchu tego manipulatora stosując równania Lagrange’a.
E
p
= 0
l
1
d
2
m
1
m
2
g
Rys. 2. Manipulator typu OP
4
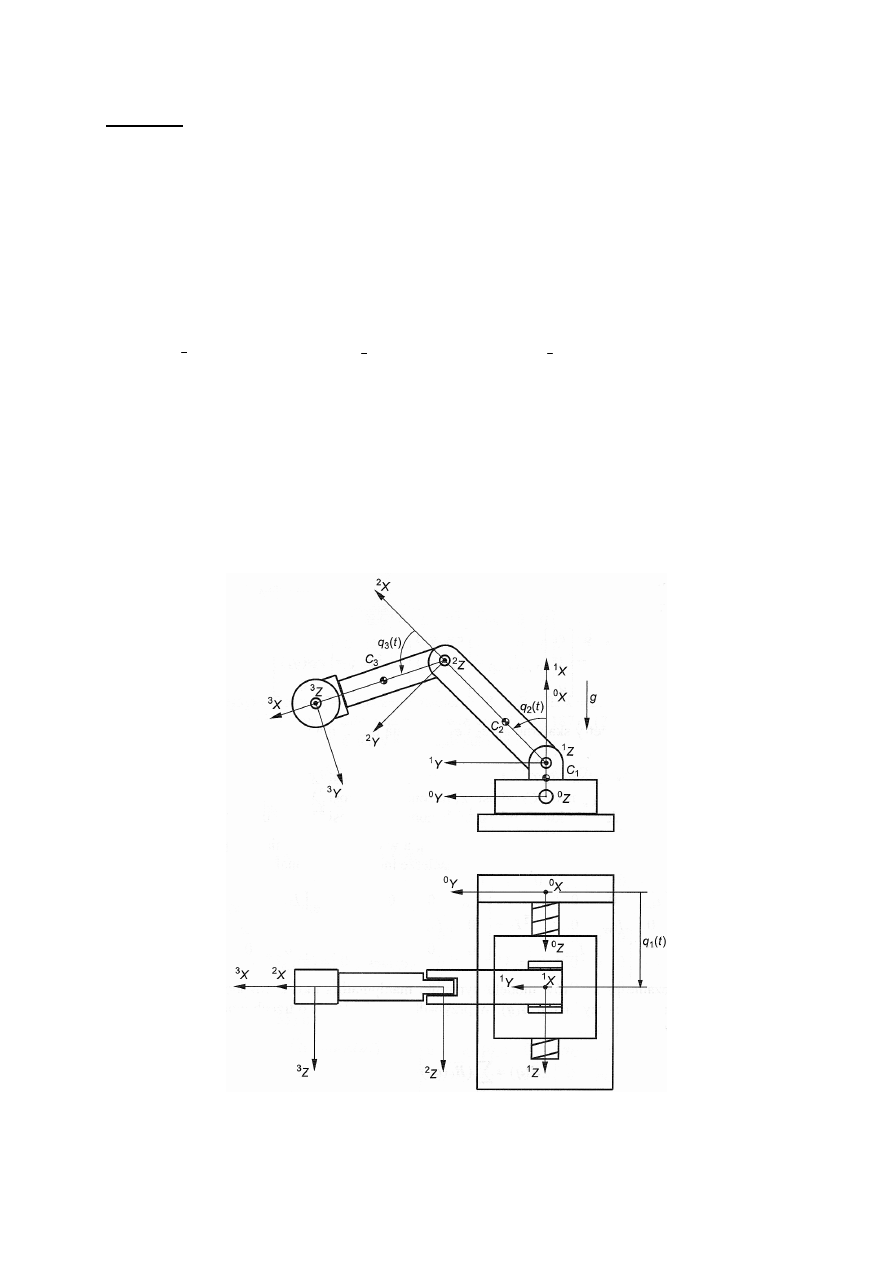
Zadanie 3
Wyznacz równania ruchu manipulatora POO, przedstawionego na rys. 3. Przyjmij, że
wszystkie ogniwa są symetryczne. Długość pierwszego ogniwa, czyli odległość od osi
0
Z do
osi
1
Z, liczona wzdłuż osi
1
X, wynosi a
1
. Długość drugiego ogniwa, czyli odległość od osi
1
Z
do osi
2
Z, liczona wzdłuż osi
2
X, wynosi a
2
. Analogicznie, długość trzeciego ogniwa wynosi
a
3
. Macierze inercji kolejnych ogniw wynoszą
=
1
1
1
1
1
0
0
0
0
0
0
zz
yy
xx
I
I
I
I
,
=
2
2
2
2
2
0
0
0
0
0
0
zz
yy
xx
I
I
I
I
,
=
3
3
3
3
3
0
0
0
0
0
0
zz
yy
xx
I
I
I
I
a ich masy są równe m
1
, m
2
, m
3
. Środki mas kolejnych ogniw umieszczone są w punktach C
1
,
C
2
i C
3
. Odległość punktu C
1
od osi
0
Z liczona wzdłuż osi
1
X wynosi e
1
. Analogicznie
odległości punktów C
2
i C
3
od osi
1
Z i
2
Z wynoszą odpowiednio e
2
i e
3
.
Rys. 3. Manipulator POO

5
Literatura:
[1] Buratowski T.: Podstawy robotyki, AGH Uczelniane Wydawnictwa Naukowo-
Dydaktyczne, 2006
[2] Craig J. J.: Wprowadzenie do robotyki. Mechanika i sterowanie, Wydawnictwa
Naukowo-Techniczne, 1995
[3] Jezierski E.: Dynamika robotów, Wydawnictwa Naukowo-Techniczne, 2006
[4] Spong M. W., Vidyasagar M.: Dynamika i sterowanie robotów, Wydawnictwa
Naukowo-Techniczne, 1997
[5] Wrotny L.T.: Dynamika układów mechanicznych. Repetytorium teoretyczne i zadania,
Oficyna Wydawnicza Politechniki Warszawskiej, 1995
[6] Wrotny L.T.: Kinematyka i dynamika maszyn technologicznych i robotów
przemysłowych
, Oficyna Wydawnicza Politechniki Warszawskiej, 1996
Informacja o prawach autorskich
O ile nie zaznaczono inaczej, rysunki i teksty pochodzą z pozycji podanych w literaturze.
Niniejsze opracowanie stanowi pomoc do laboratorium z Podstaw Robotyki.
Wyszukiwarka
Podobne podstrony:
Dynamika manipulatora
7 Dynamika manipulatora
tchoń, robotyka1, Dynamika manipulatora
9 Dynamika manipulatorów i robotów, przykład
6 Analiza dynamiczna manipulatorów robotów jako mechanizmów
1 Kinematyka i dynamika robotów i manipulatorów literatur
obliczenia do robota, Automatyka i Robotyka, Semestr 4, Kinematyka i Dynamika Robotów i Manipulatoró
Kinematyka odwrotna, Automatyka i Robotyka, Semestr 4, Kinematyka i Dynamika Robotów i Manipulatorów
Notacja Denavita, Automatyka i Robotyka, Semestr 4, Kinematyka i Dynamika Robotów i Manipulatorów, p
1 Kinematyka i dynamika robotów i manipulatorów literatur
Dynamika1
Techniki wywierania wplywu oparte na dynamice interakcji
więcej podobnych podstron