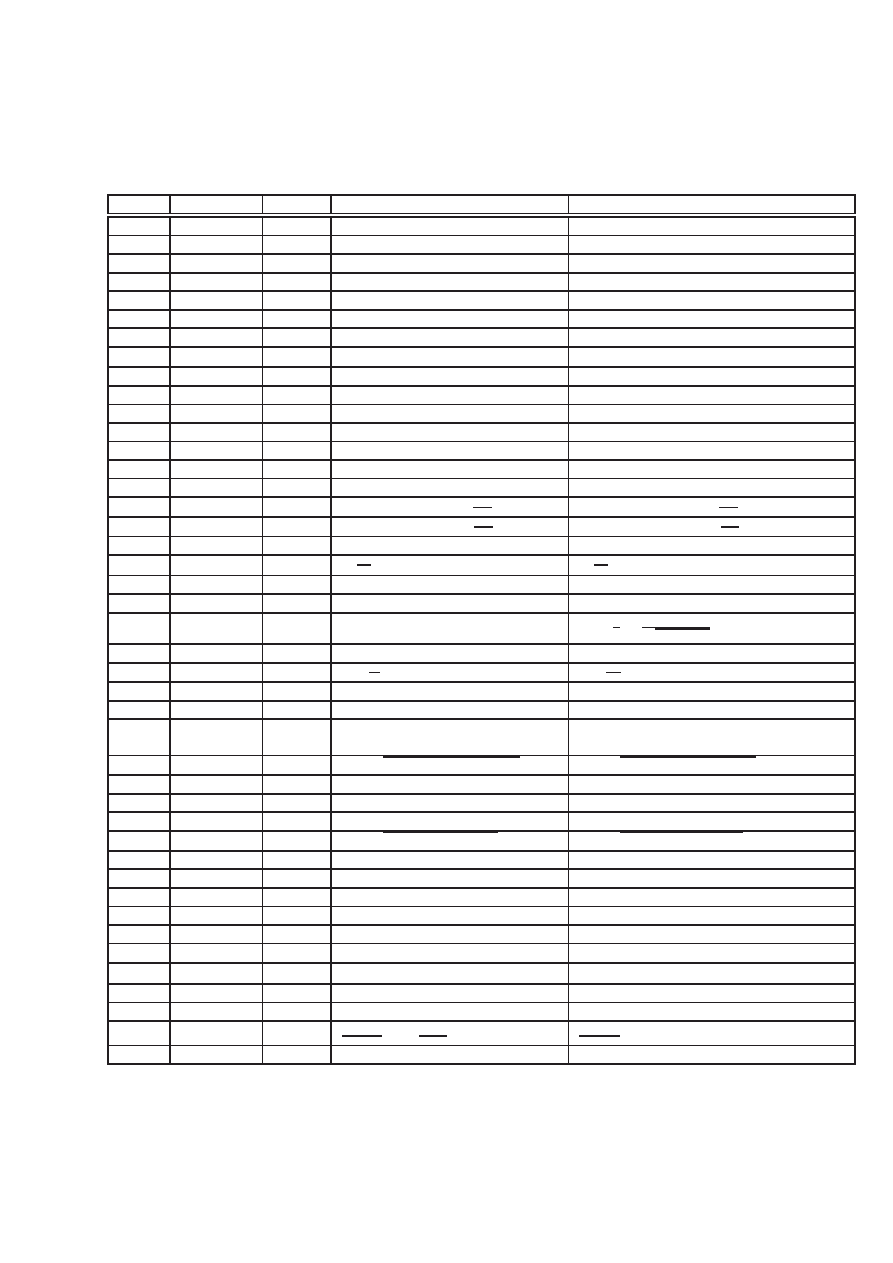
Errata
(21.09.2009)
Błędy zauważone w pracy
J. Grabski, J. Strzałko ”WYKŁADY Z MECHANIKI OGÓLNEJ”, Łódź 2004
Strona
od góry
od dołu
Jest
Powinno być
21
7
uwzględnioneoddzielone zostały
27
10
skalarną
3
liczbową (niewektorową)
3
27
5
skalarem
liczbą
31
Rys.2.11-a)
a
x
a
1x
32
6
na prostą jest
na płaszczyznę jest
42
2
i rzuty (a
x
, a
y
)
i rzuty prostokątne (a
x
, a
y
)
43
5
b
= c a
b
= |c| a
64
3
~
P
= ~
P
2
− ~P
1
~
P
= ~
P
2
+ ~
P
1
71
5
przegubu walcowego:
71
6
(łączącym) ograniczony
73
1
na stronicach 68 – 71.
na stronicach 85 – 88.
77
4
słowy, położeniu równowagi
słowy, w położeniu równowagi
83
7
na stronicy 111
na stronicach 111–113
97
9
w równowadze wtedy,
w równowadze wtedy i tylko wtedy,
97
7
i ma jej kierunek.
i leży na tej samej prostej.
112
5
−dT + (S + dS) cos
∆ϕ
2
= 0
−∆T + (S + ∆S) cos
∆ϕ
2
= 0
112
6
+dN − (S + dS) sin
∆ϕ
2
= 0
+∆N − (S + ∆S) sin
∆ϕ
2
= 0
113
11
c
= ln S
1
c
= ln S
2
113
9
ln
S
2
S
1
= µα
ln
S
1
S
2
= µα
113
7
S
2
= S
1
e
µα
S
1
= S
2
e
µα
120
5
punktu C
punktu O
146
1
brak wzoru
K
=
1
ρ
=
y
′′
√
[1+(y
′
)
2
]
3
169
4
poruszającej ruchem
poruszającej się ruchem
179
5
ε
=
ω
dt
=
ε
=
dω
dt
=
179
10
(~p
τ
A/O
)
2
(p
τ
A/O
)
2
187
4
τ ηζ
ξηζ
187
5
p
τ
= (~p
τ
U
)
τ
+ (~p
η
U
)
τ
+
p
ξ
= (~p
τ
U
)
ξ
+ (~p
η
U
)
ξ
+
+(~p
τ
W
)
τ
+ (~p
η
W
)
τ
+ (~p
C
)
τ
+(~p
τ
W
)
ξ
+ (~p
η
W
)
ξ
+ (~p
C
)
ξ
187
9
p
=
p(p
τ
)
2
+ (p
η
)
2
+ (p
ζ
)
2
p
=
p(p
ξ
)
2
+ (p
η
)
2
+ (p
ζ
)
2
192
14
m
= 2 kg;
m
1
= 1 kg; m
2
= 2 kg;
192
1
m p
i
= m
i
g
− F
o
m
i
p
i
= m
i
g
− F
o
202
3
zdefiniowana się jako
zdefiniowana jako
205
15
v
=
pv
2
o
− gl(1 − cos ϕ)
v
=
pv
2
o
− 2gl(1 − cos ϕ)
206
12
względem bieguna
względem nieruchomego bieguna
206
6
dowolnego bieguna B
dowolnego punktu B
214
3
warunków początkowych v(t = 0)
warunków początkowych (dla t = 0)
216
4
i odległości od dwu płaszczyzn,
i dwu współrzędnych,
219
10
punktu i na punkt j
punktu j na punkt i
229
6
wyrażeniem m ~v
C
wyrażeniem m~r
CC
= ~0
229
1
~
K
C
= ~r
OC
× m ~v
C
+ ~
K
C(w)
~
K
C
= ~
K
C(w)
237
1
v
Bx
v
Bx
v
Bx
v
Bx
v
By
v
Bz
247
10
v
Bx
v
Bx
v
Bx
v
Bx
v
By
v
Bz
260
9
d ~
K
B(w)
dt
+ m
d~
r
BC
dt
× ~p
B
= ~
M
B
d ~
K
B(w)
dt
+ m~r
BC
× ~p
B
= ~
M
B
274
12
ruchem postępowym
ruchem płaskim
Wyszukiwarka
Podobne podstrony:
Errata Wyklady mechanika html
Toksykologia - Wykład 3 - Mechanizmy działania, szkoła bhp, Toksykologia
m010p, STUDIA, SEMESTR I, Mechanika, Mechanika Wyklady, Mechanika net
1. Wykład z językoznawstwa ogólnego - 14.10.2014, Językoznawstwo ogólne
10. Wykład z językoznawstwa ogólnego - 20.01.2015, Językoznawstwo ogólne
Praca kontrolna nr 1 z mechaniki ogólnej cz 1
m014a, STUDIA, SEMESTR I, Mechanika, Mechanika Wyklady, Mechanika net
m002b, STUDIA, SEMESTR I, Mechanika, Mechanika Wyklady, Mechanika net
Prawo Rzymskie - skrypt z wykładów, prawo rzymskie
13. Wykład z językoznawstwa ogólnego - 3.02.2015, Językoznawstwo ogólne
wykłady z dydaktyki ogólnej 2, Wykłady z dydaktyki ogólnej
Wykłady Maćkiewicza, 2007.12.12 Językoznawstwo ogólne - wykład 8, Językoznawstwo ogólne
więcej podobnych podstron