Ruch drgający
Ruch okresowy (periodyczny)
-
powtarzający się w regularnych odstępach
czasu.
Przemieszczenie cząstki
w ruchu periodycznym wyrażone za pomocą
funkcji
sinus i cosinus
drgania harmoniczne
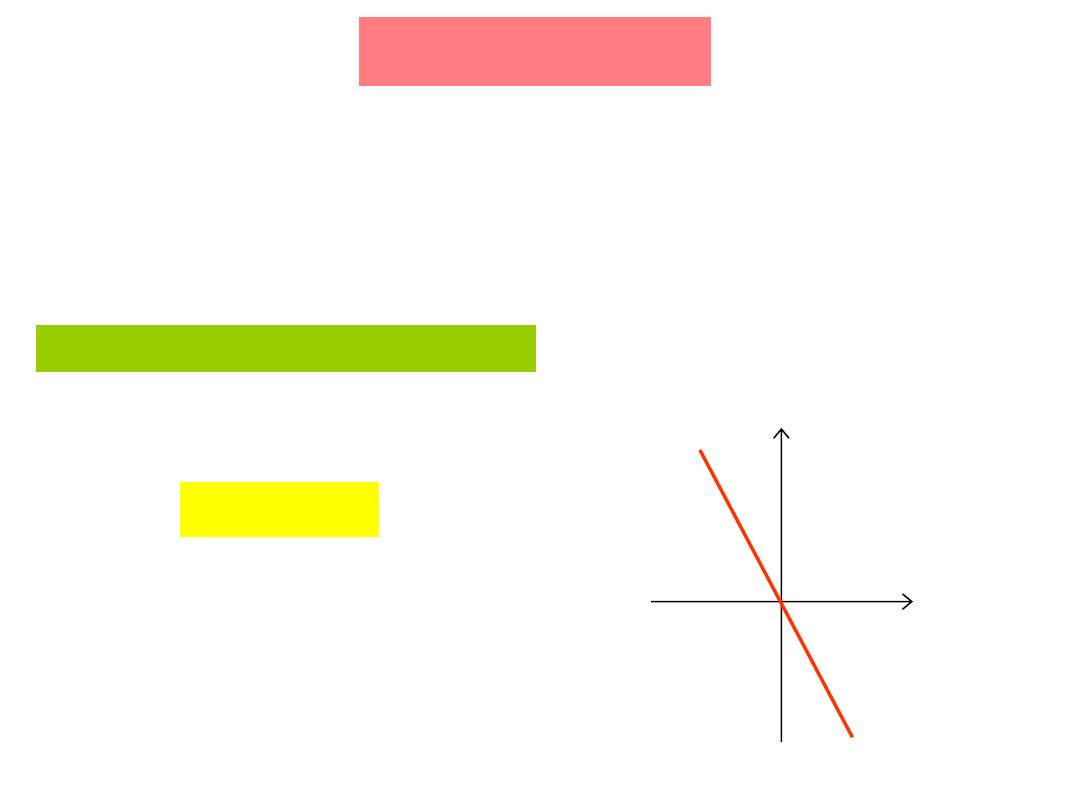
Siła harmoniczna (sprężystości)
-
proporcjonalna do przesunięcia
ciała od początku układu i skierowana ku początkowi układu
x
k
F
gdzie x -
przemieszczenie względem
położenia równowagi
F
x
http://en.wikipedia.org/wiki/Simple_harmonic_motion
Useful webpages:
http://video.answers.com/learn-about-harmonic-motion-part-3-no-calculus-99168827
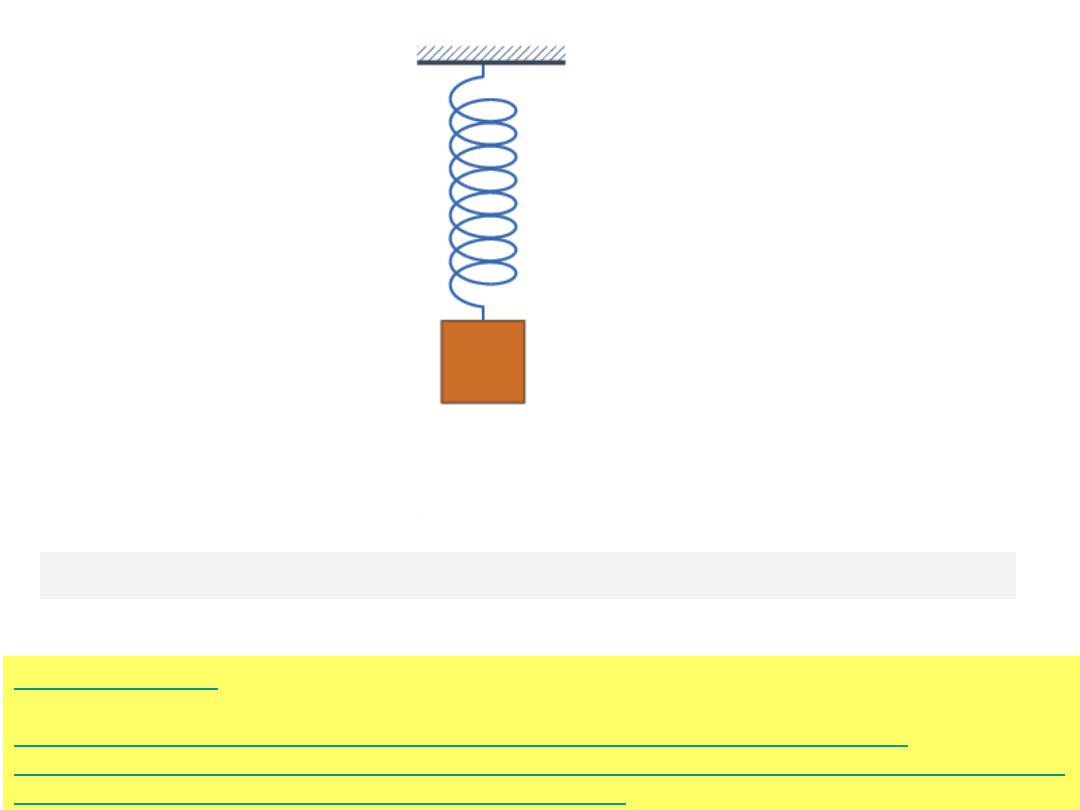
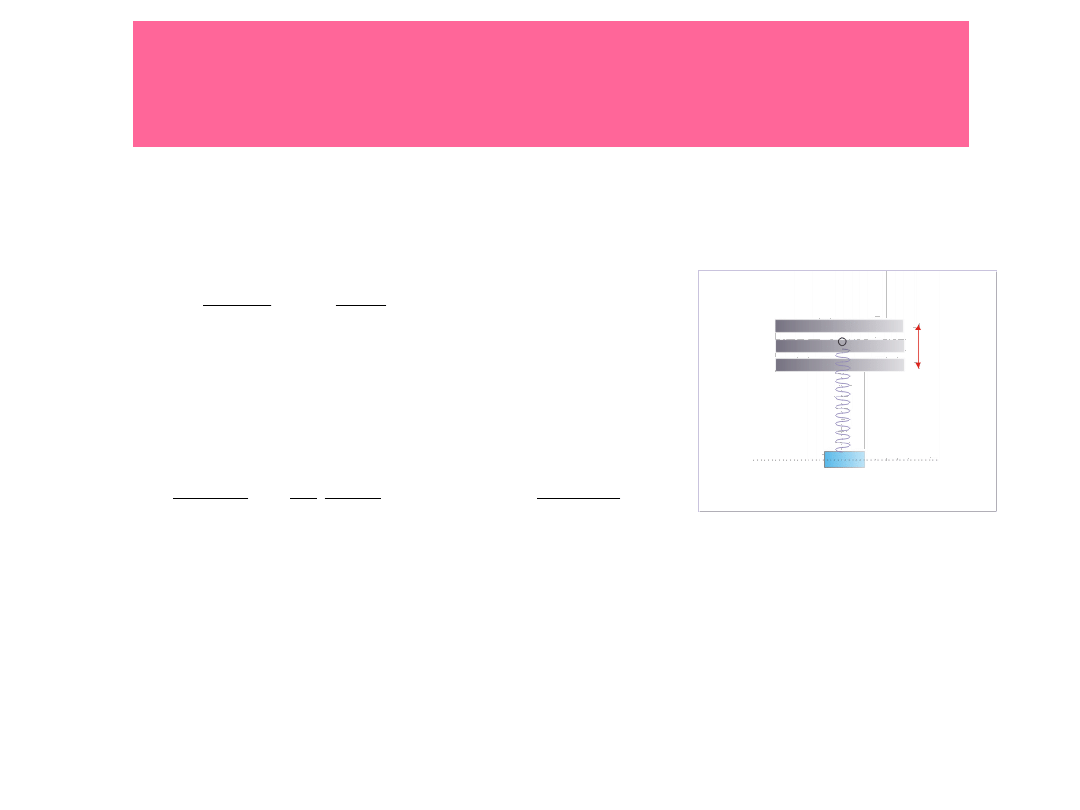
An undamped
spring-mass system
undergoes simple harmonic motion.
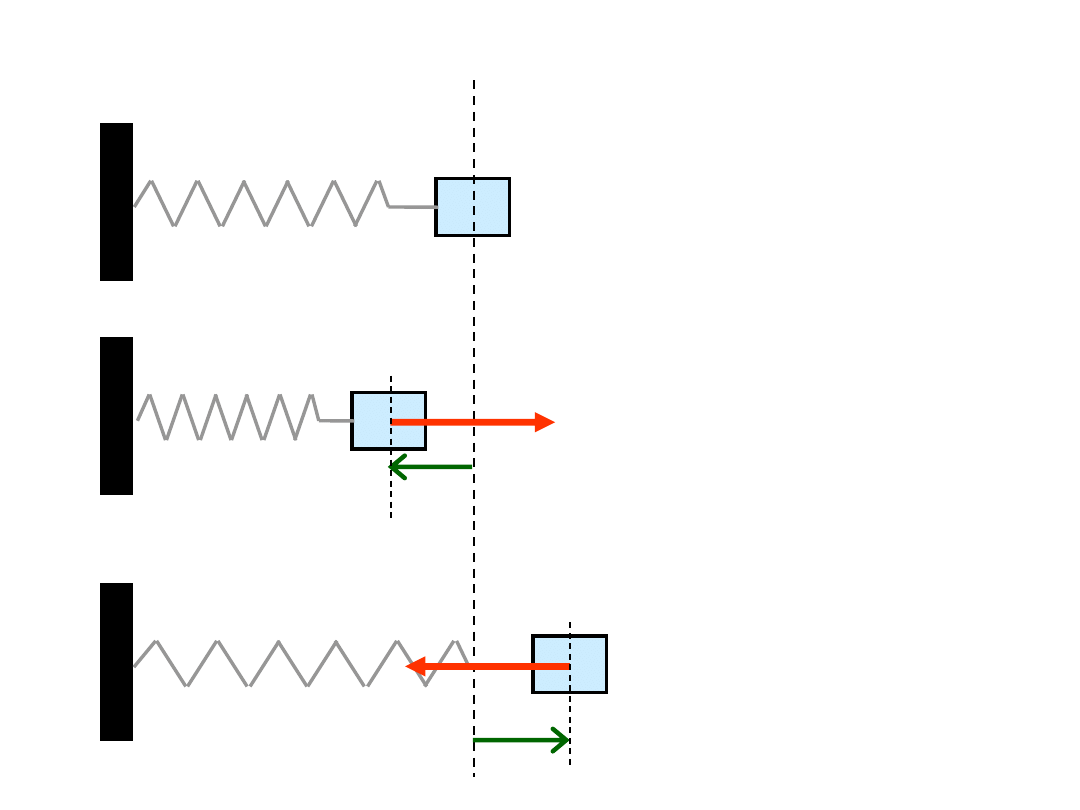
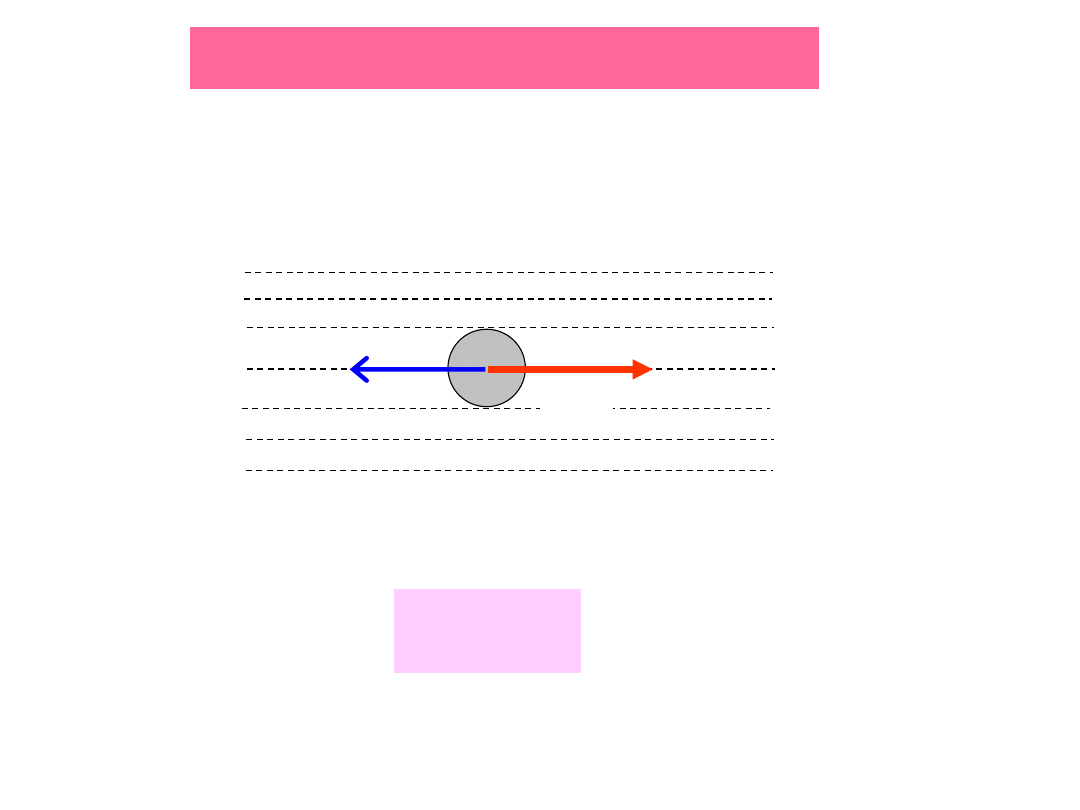
Drgania harmoniczne
x
k
F
położenie równowagi
F = 0
m
x = 0
x<0
F > 0
ściskanie sprężyny
F < 0
x > 0
rozciąganie sprężyny
2
2
dt
x
d
a
definicja przyspieszenia
x
m
k
dt
x
d
2
2
Stąd:
równanie różniczkowe liniowe 2. rzędu
a
m
F
II zasada dynamiki
ogólne rozwiązania (przypadek 1-wymiarowy):
)
cos(
)
sin(
)
(
0
2
0
1
t
A
t
A
t
x
m
k
0
częstość drgań (rad/s)
)
sin(
)
(
0
t
A
t
x
Stałe
A
i
trzeba wyznaczyć z warunków początkowych tzn.
x(0)
i
v(0)
A - maksymalne wychylenie (amplituda)
- faza poczatkowa
)
cos(
)
(
0
t
A
t
x
lub:
Ponieważ złożeniem funkcji okresowych jest funkcja okresowa, stąd:
A
1
cos
t + A
2
sin
t
A
2
sin
t
A
1
cos
t
Złożenie funkcji okresowych - funkcja okresowa:
A
1
cos
0
t + A
2
sin
0
t = Asin(
0
t +
)
T
f
1
częstotliwość (Hz)
0
2
T
okres (s)
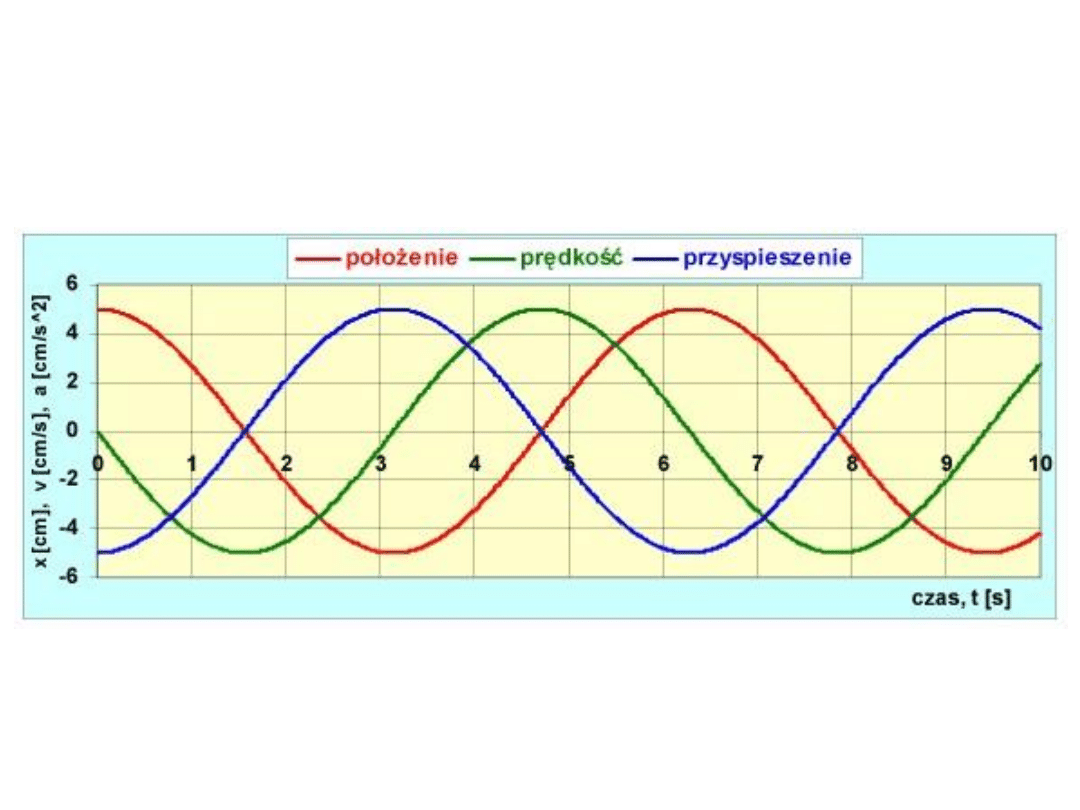
Przyspieszenie: d
2
x/dt
2
= a(t) =
– A
0
2
cos
0
t
amplituda: A
0
2
(m/s
2
)
Liczba
drgań w czasie t :
n = t/T
Po podzieleniu obu stron przez t - liczba
drgań w jednostce czasu:
T
t
n
1
Prędkość: dx/dt = v(t) = – A
0
sin
0
t amplituda: A
0
(m/s)
cos
)`
(sin
sin
)`
(cos
Położenie: x(t) = Acos
0
t
amplituda: A (m)
0
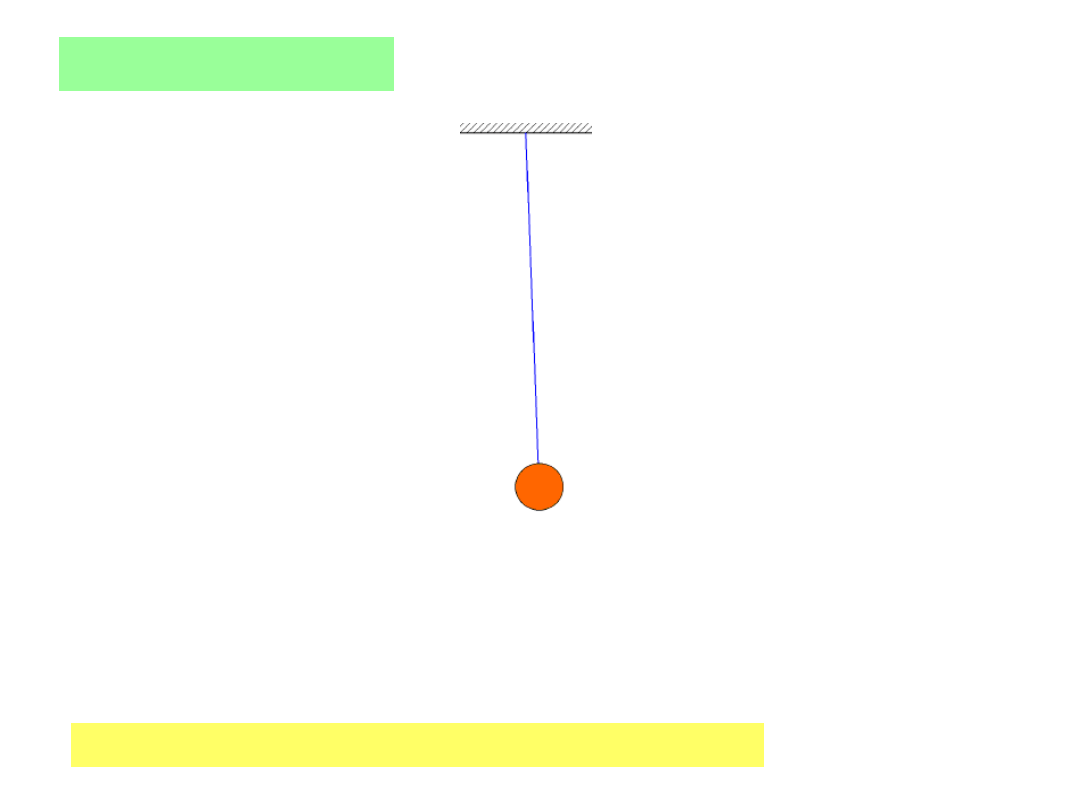
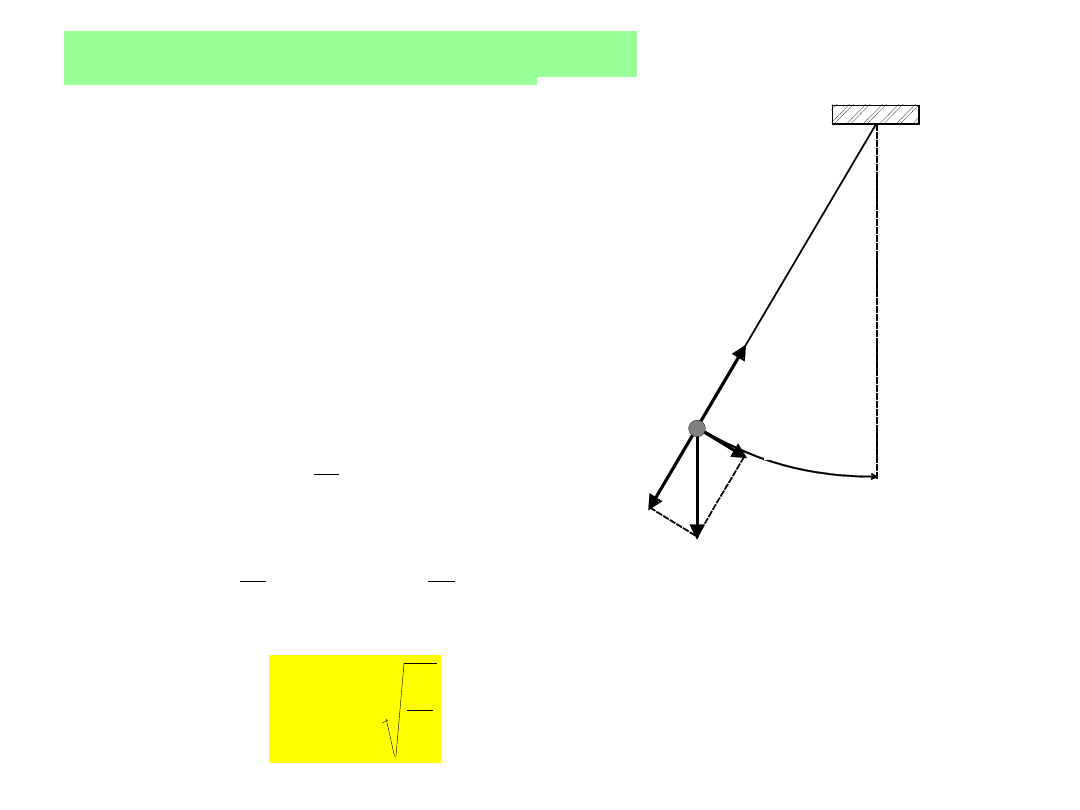
The motion of an undamped
pendulum
approximates to simple
harmonic motion if the amplitude is very small relative to that of the rod.
http://en.wikipedia.org/wiki/Simple_harmonic_motion
Simple pendulum
θ
sin
mg
F
dla małych kątów
θ
θ
sin
L
x
mg
F
L
g
x
L
g
a
2
0
g
L
T
2
okres małych drgań nie zależy od amplitudy
ani masy wahadła
Wahadło proste (matematyczne)
l
N
mg
mgcos
mgsin
x=l
m
x=L
L
Punkt materialny zawieszony na cienkiej,
nieważkiej i nierozciągliwej nici
T
/
2
N
Q
F
l
mg
P
S
L
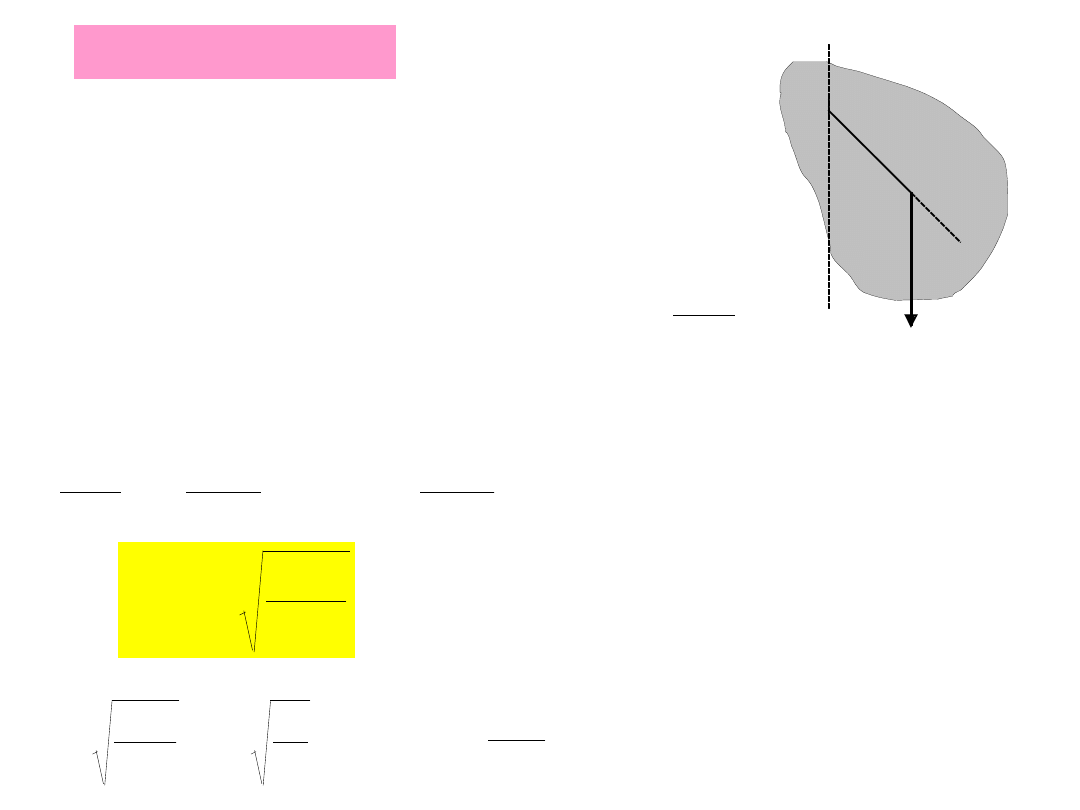
Wahadło fizyczne
Bryła sztywna zawieszona na poziomej osi
nieprzechodzącej przez środek masy
Dla małych kątów
θ
θ
sin
I
mgL
I
mgL
dt
d
2
0
2
2
θ
θ
θ
sin
mgL
M
Moment siły ciężkości:
II zasada dynamiki bryły sztywnej:
2
2
dt
d
I
I
M
mgL
l
T
2
okres drgań harmonicznych
g
L
mgL
I
z
2
2
mL
I
L
z
długość zredukowana
wahadła fizycznego
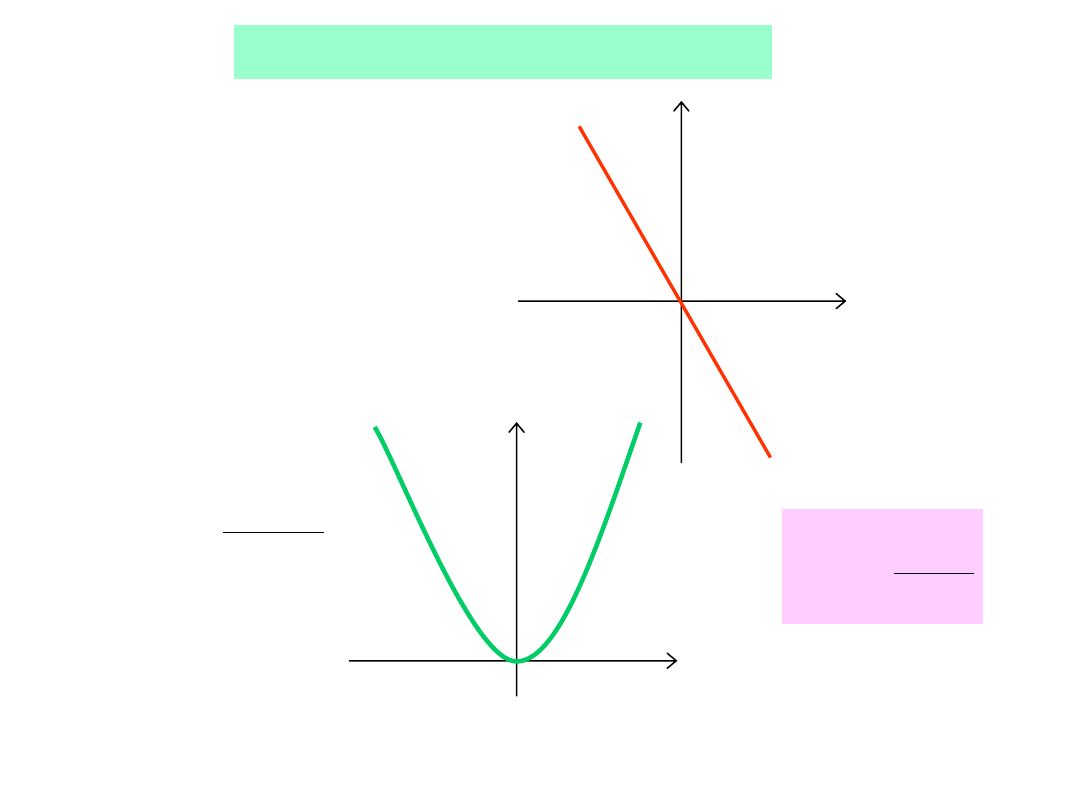
Energia drgań harmonicznych
F
x
x
k
F
E
p
x
punkt równowagi trwałej – minimum energii potencjalnej
2
2
x
k
E
p
dx
dE
F
p
Energia ruchu harmonicznego prostego
Energia potencjalna
sprężyny:
2
2
kx
E
p
Dla maksymalnie
rozciągniętej sprężyny (x = A) jej energia:
E
C
= (1/2)kA
2
E
k
= 0
2
2
2
2
1
2
1
v
2
1
kA
kx
m
2
2
2
v
x
A
m
k
Stąd:
Ponieważ
k/m =
0
2
więc:
2
2
0
v
x
A
Po zwolnieniu sprężyny (przy założeniu braku tarcia i sił oporu),
zgodnie z zasadą zachowania energii, w dowolnej chwili:
suma energii kinetycznej i potencjalnej
= (1/2)kA
2
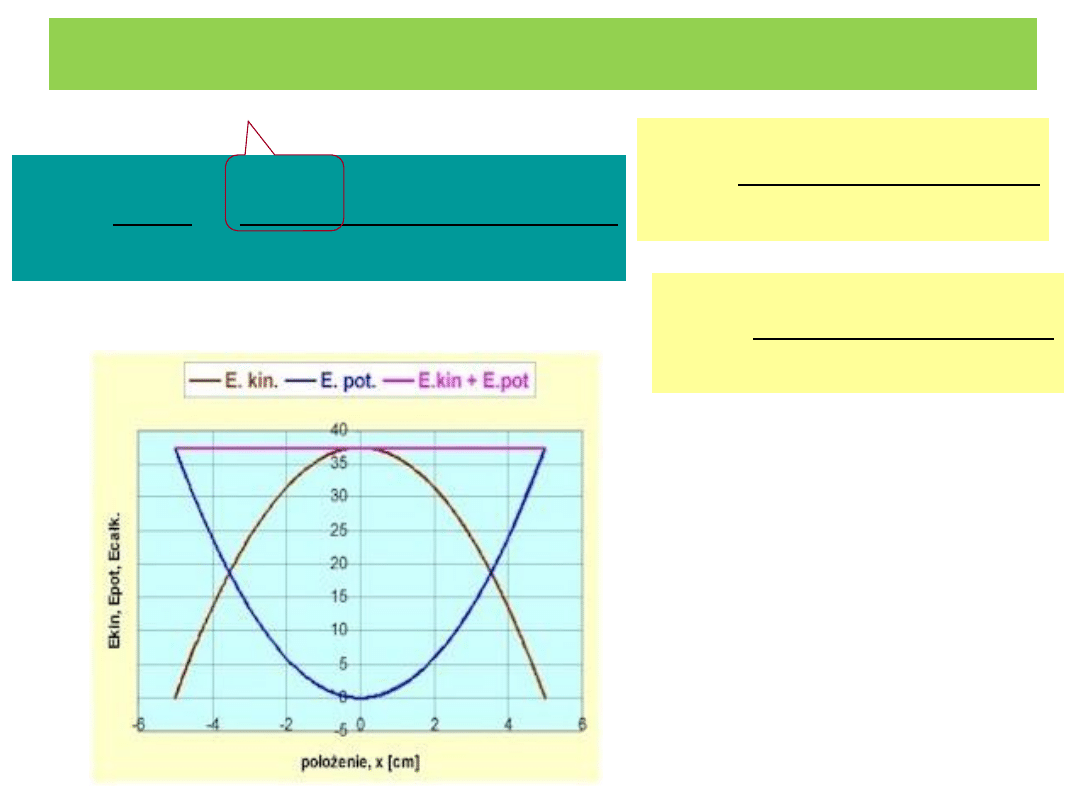
Energia kinetyczna w ruchu harmonicznym
2
sin
2
v
0
2
2
2
0
2
t
A
m
m
E
k
= k
2
sin
0
2
2
t
kA
E
k
2
cos
0
2
2
t
kA
E
p
Oscylator harmoniczny tłumiony
Tłumienie oscylatora
straty energii
układu oscylatora
W przypadku
drgań mechanicznych, siłą hamującą (tłumiącą) ruch
cząstki jest
siła oporu F
op
ośrodka
.
v
F
op
v
F
op
Siła oporu lepkim płynie (cieczy lub gazie) ma zwrot przeciwny do
prędkości i jest wprost proporcjonalna do prędkości :
F
op
= -
dx/dt

Po włączeniu
siły hamującej do oscylatora
-
równanie ruchu:
t
x
kx
t
x
m
d
d
d
d
2
2
Wprowadzamy
= m/
oraz oznaczamy
częstość drgań nietłumionych
0
2
= k/m
0
d
d
1
d
d
2
0
2
2
x
t
x
t
x
Otrzymujemy:
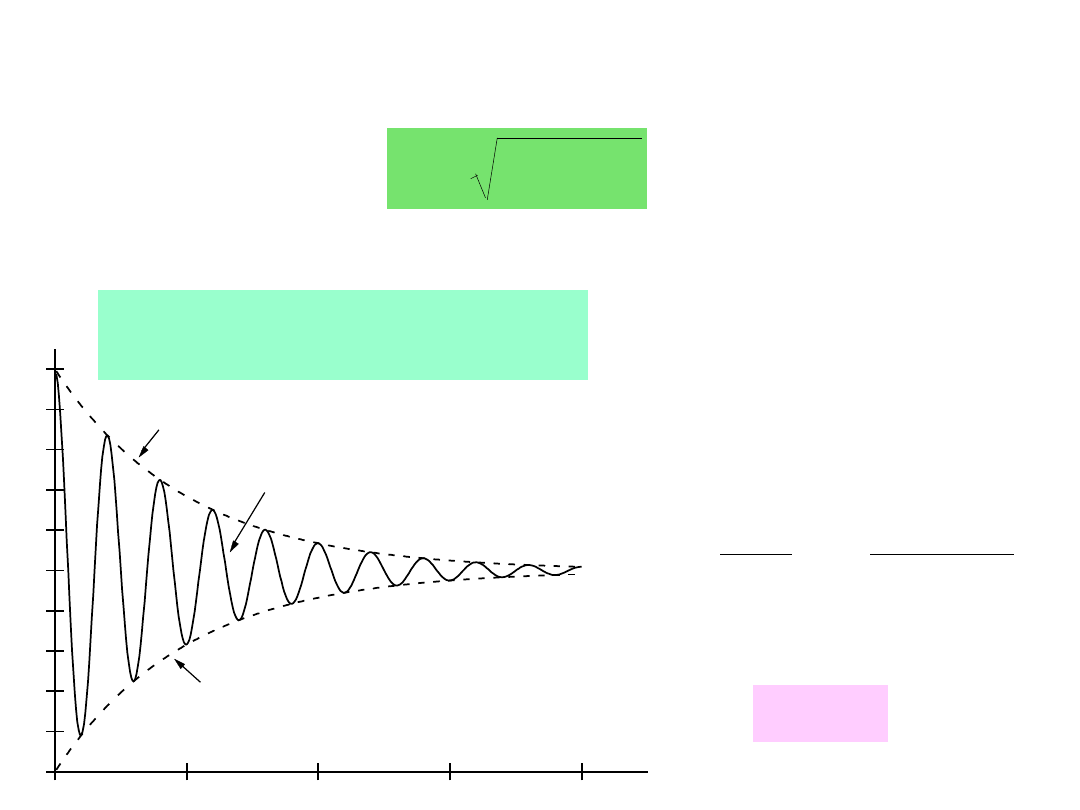
Rozwiązanie w postaci drgań okresowo zmiennych tłumionych :
t
e
A
x
t
cos
Współczynnik
= 1/(2
)
określający wielkość tłumienia nazywamy
współczynnikiem tłumienia
.
Po obliczeniu pochodnych i podstawieniu do
równania ruchu
warunek na
częstość drgań tłumionych:
2
2
0
Opór zmniejsza amplitudę i częstość drgań
Wielkość tłumienia określa:
-
współczynnik tłumienia
(lub stała czasowa
)
0
-Ae
-
t
Ae
-
t
Ae
-
t
cos
t
-A
A
t
x
Przypadek "słabego tłumienia" tj.
<
0
T
T -
okres drgań tłumionych
T
e
Ae
Ae
A
A
T
T
t
t
T
t
t
ln
ln
ln
)
(
-
logarytmiczny dekrement
tłumienia
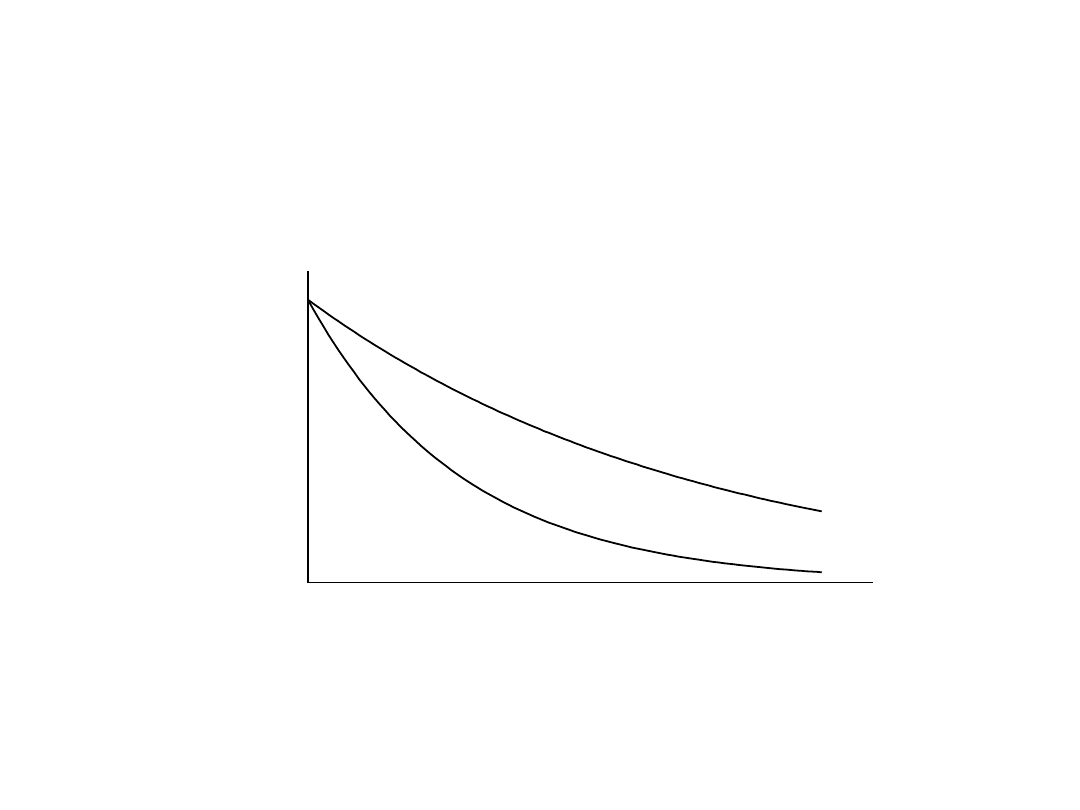
Przypadek
tłumienia powyżej tzw. wartości krytycznej
>
0
ruch nie
jest ruchem
drgającym, ciało wychylone z położenia równowagi powraca
do niego asymptotycznie
ruch
pełzający (aperiodyczny).
=
0
>
0
t
X
Straty mocy, współczynnik dobroci
Definicja
współczynnika dobroci
Q
:
okresie
w
stracona
ana
zmagazynow
E
E
Q
_
1
_
_
2
Dla przypadku słabo tłumionego oscylatora harmonicznego (
<<
0
)
Q
0
/2
Oscylator
Q
Ziemia dla fali sejsmicznej
Struna fortepianu lub skrzypiec
Atom wzbudzony
Jądro wzbudzone
250-400
1000
10
7
10
12
Typowe wartości Q
Drgania wymuszone oscylatora
harmonicznego
Siła zewnętrzna
F(t)
przyłożona do oscylatora - podtrzymuje gasnące
drgania
równanie ruchu:
)
(
d
d
d
d
2
2
t
F
kx
t
x
t
x
m
Po podstawieniu
= m/
oraz
0
2
= k/m:
m
t
F
x
t
x
t
x
)
(
d
d
1
d
d
2
0
2
2
gdzie:
0
-
częstość własna
układu, tj. częstość drgań swobodnych, gdy nie
działa siła zewnętrzna i nie ma tarcia ani innych sił oporu,
-
stała czasowa
związana ze
współczynnikiem tłumienia
= 1/(2
)
Gdy
układ jest
zasilany
częstością
różną od
0
,
wówczas
drgania
będą odbywały się z częstością siły zewnętrznej, a nie z
częstością własną
.
Siłę
F
w tym przypadku nazywamy
siłą wymuszającą
.
t
m
t
F
m
t
F
sin
sin
)
(
0
0
Założenie:
gdzie
0
= F
0
/m
Rozwiązanie postaci:
x=Asin(
t +
)
gdzie:
A
- amplituda
-
przesunięcie fazowe
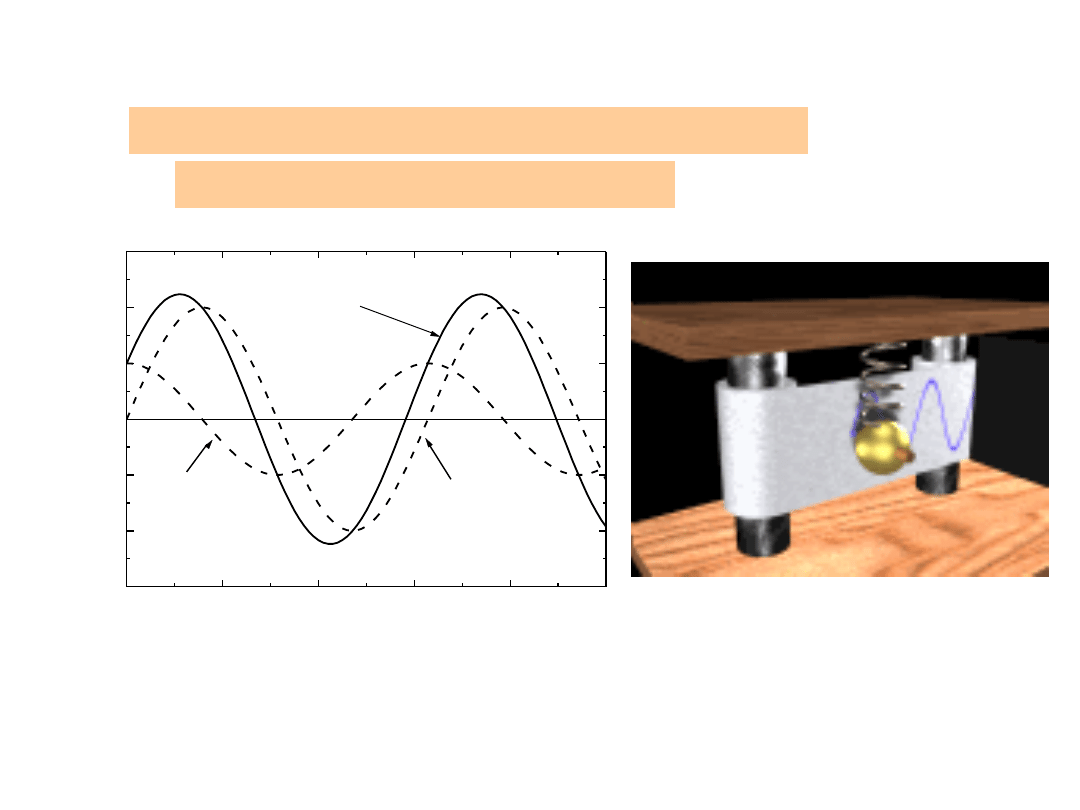
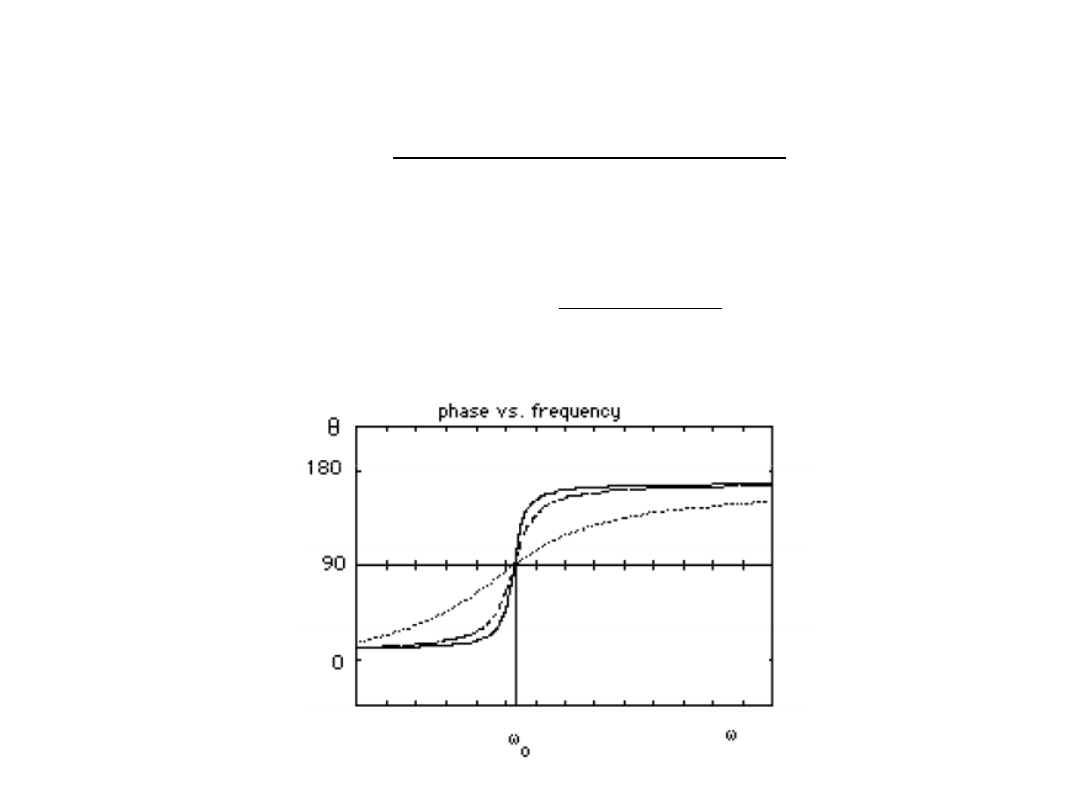
Przesunięcie fazowe
mówi nam, o jaki kąt maksimum przemieszczenia
wyprzedza maksimum siły
(o ile przesunięte są wykresy x(t) i F(t)).
Np.
Siła osiąga swoje maksimum, gdy przemieszczenie jest równe zeru (i rośnie w
kierunku dodatnim). Oznacza to,
że x opóźnia się względem siły o
/2.
2
/
1
2
2
2
2
2
0
0
]
4
)
[(
A
Amplituda:
Rozwiązanie
2
2
0
2
tg
Przesunięcie
fazowe:
http://www.physics.rutgers.edu/~jackph/2005s/PS02.pdf
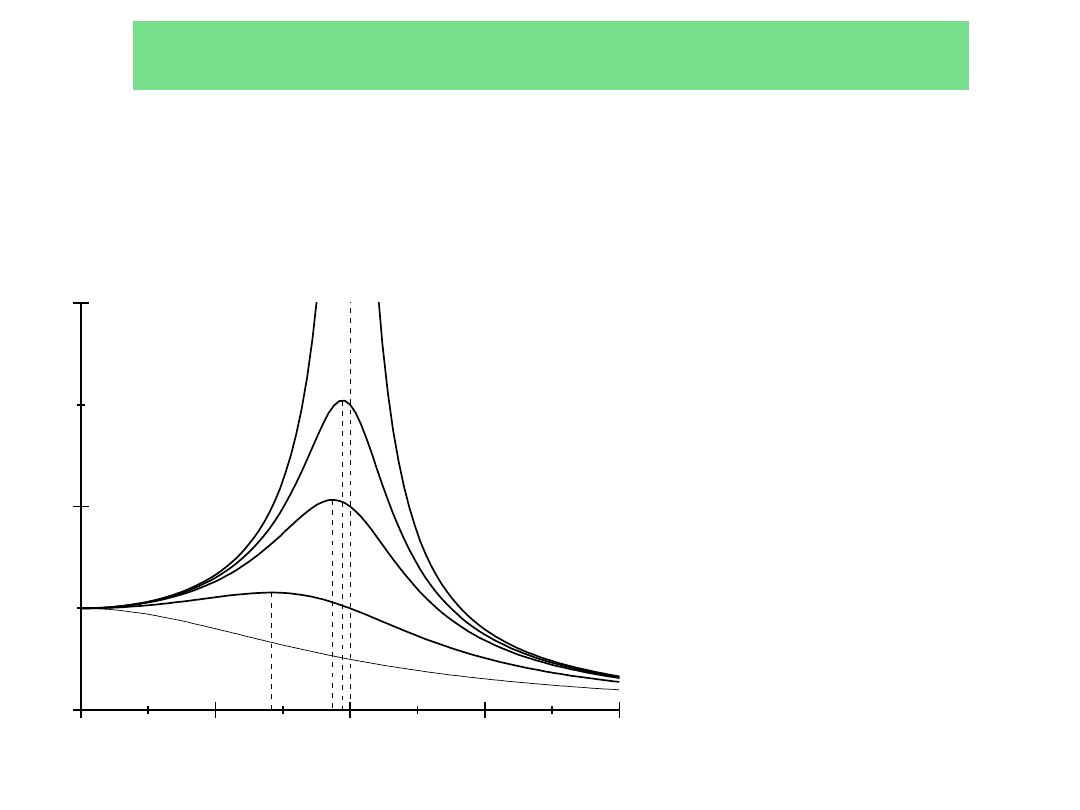
REZONANS
Zjawisko rezonansu
występuje, gdy siła wymuszająca ma odpowiednią
częstotliwość
gwa
łtowny wzrost
amplitudy
drgań nawet przy
niewielkiej
wartości siły wymuszającej.
A
4
3
2
1
0
= 0
Częstość rezonansową
r
i
amplitudę rezonansową
A
r
możemy obliczyć z warunku na
maksimum amplitudy
drgań.
2
2
0
0
2
A
Funkcja
A(
) osiąga maksimum
dla
częstości rezonansowej
:
2
2
0
2
r
Im mniejsze
tłumienie
(dłuższy czas
), tym
większa amplituda A.
Moc pochłaniana przez oscylator zasilany siłą wymuszającą F zależy od
prędkości
P = Fv
Jeżeli tłumienie jest słabe (
<<
0
), to maksymalna amplituda
odpowiada częstości drgań własnych
r
=
0
.
Wówczas - przesunięci fazowe pomiędzy siłą a wychyleniem
=
/2.
s
iła nie jest zgodna w fazie z wychyleniem.
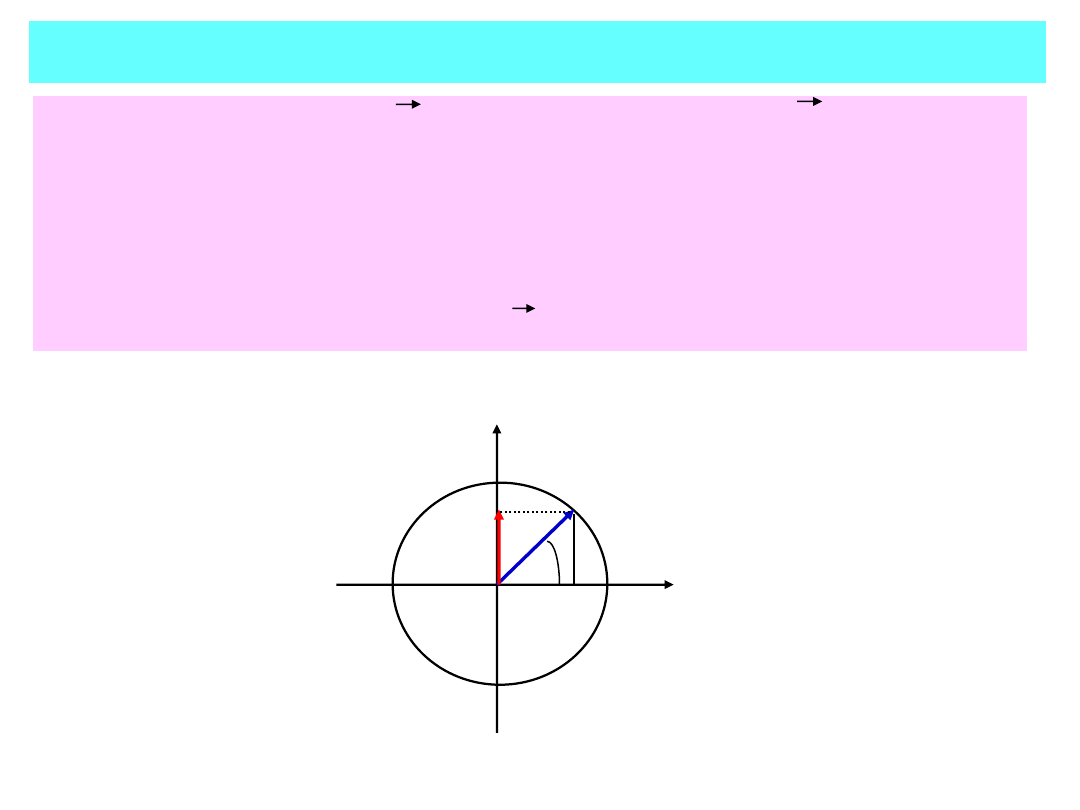
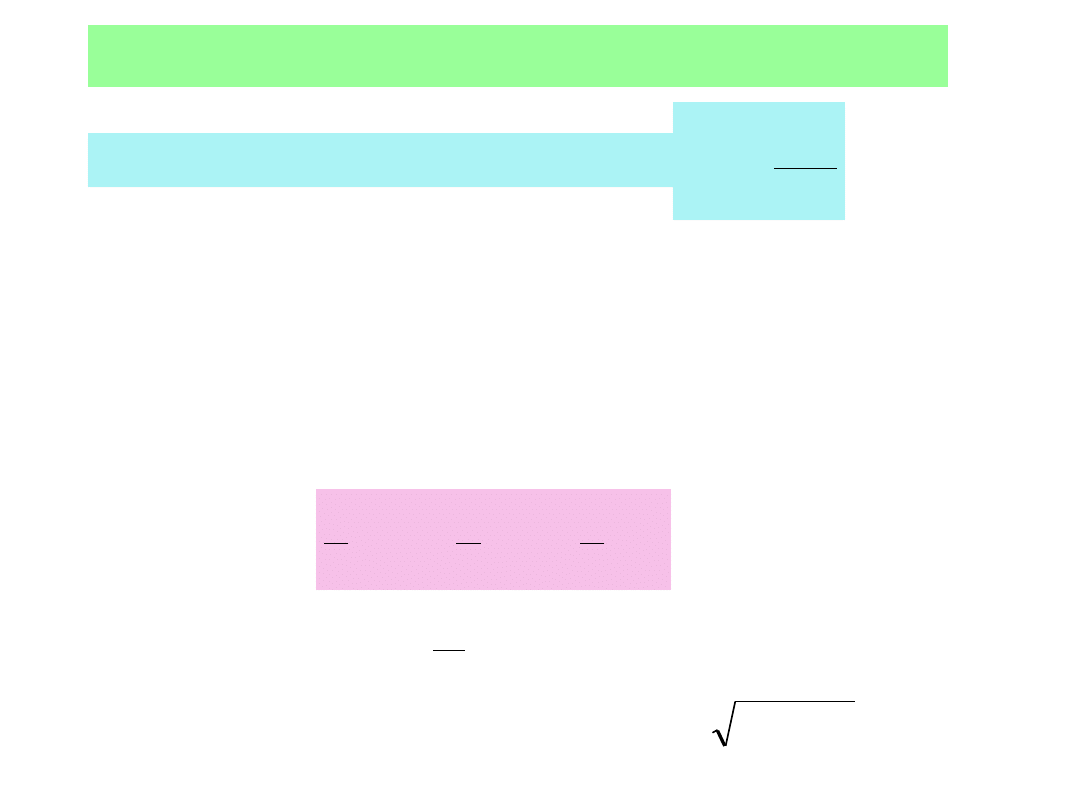
Graficzne przedstawienie drgania harmonicznego
Ruch rzutu
końca wektora
r
na
oś OY, przy czym wektor
r
wiruje
dookoła
środka O ze stałą prędkością kątową
D
ługość rzutu wektora: r
y
= Asin(
t+
0
)
A
- promie
ń koła
0
-
k
ąt, jaki tworzy wektor
r
z
osią OX w chwili t=o
X
Y
O
0
r
y
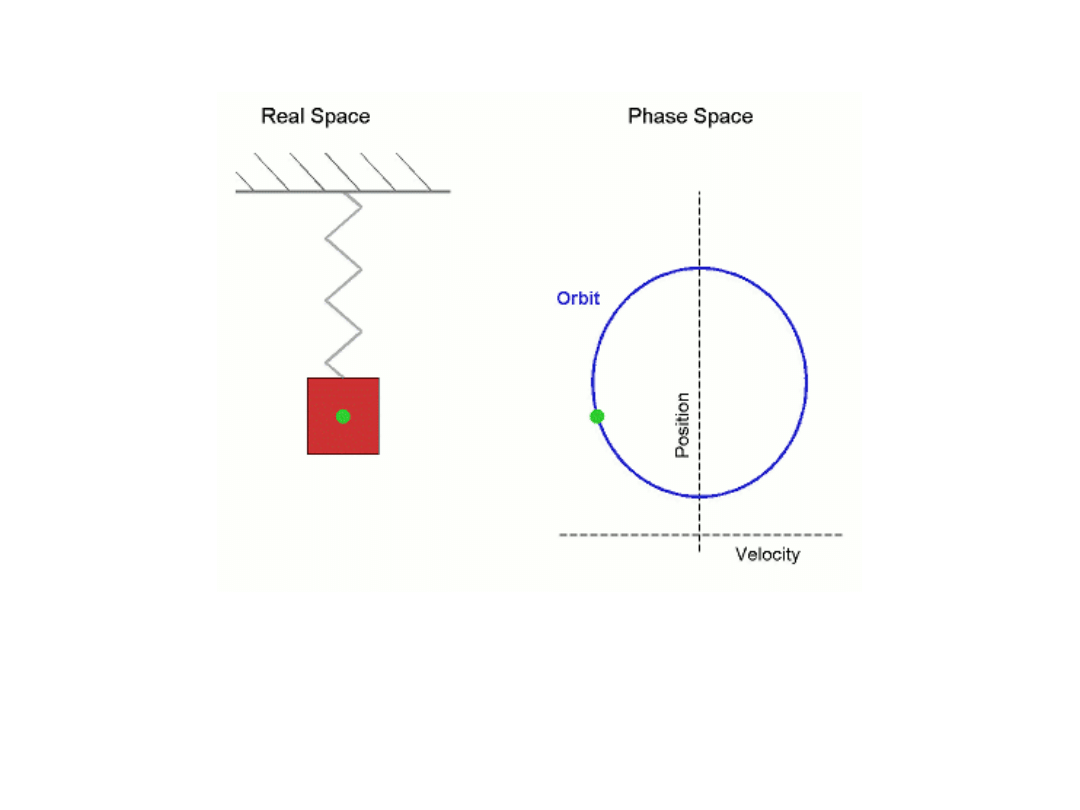
Simple harmonic motion shown both in real space and phase space.
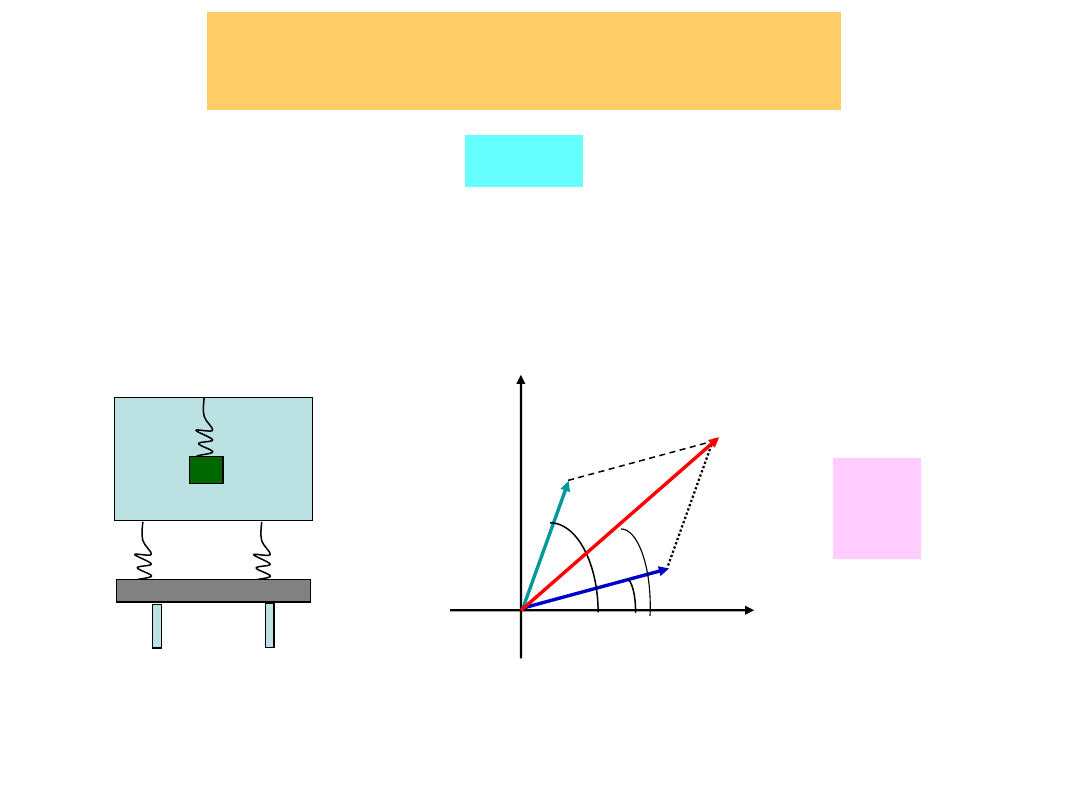
Składanie drgań w jednym kierunku
(drgania równoległe)
)
sin(
)
(
)
sin(
)
(
2
2
1
1
t
A
t
x
t
A
t
x
2
1
2
1
x
x
x
drganie wypadkowe
X
Y
O
1
A
1
2
A
2
A
A=?
=?
k
1
k
2
k
2
Składanie drgań w jednym kierunku
t
t
A
t
x
t
x
x
2
cos
2
sin
2
)
(
)
(
2
1
2
1
2
1
)
sin(
)
(
)
sin(
)
(
2
2
1
1
t
A
t
x
t
A
t
x
A
A
A
2
1
2
1
x
x
x
drganie wypadkowe
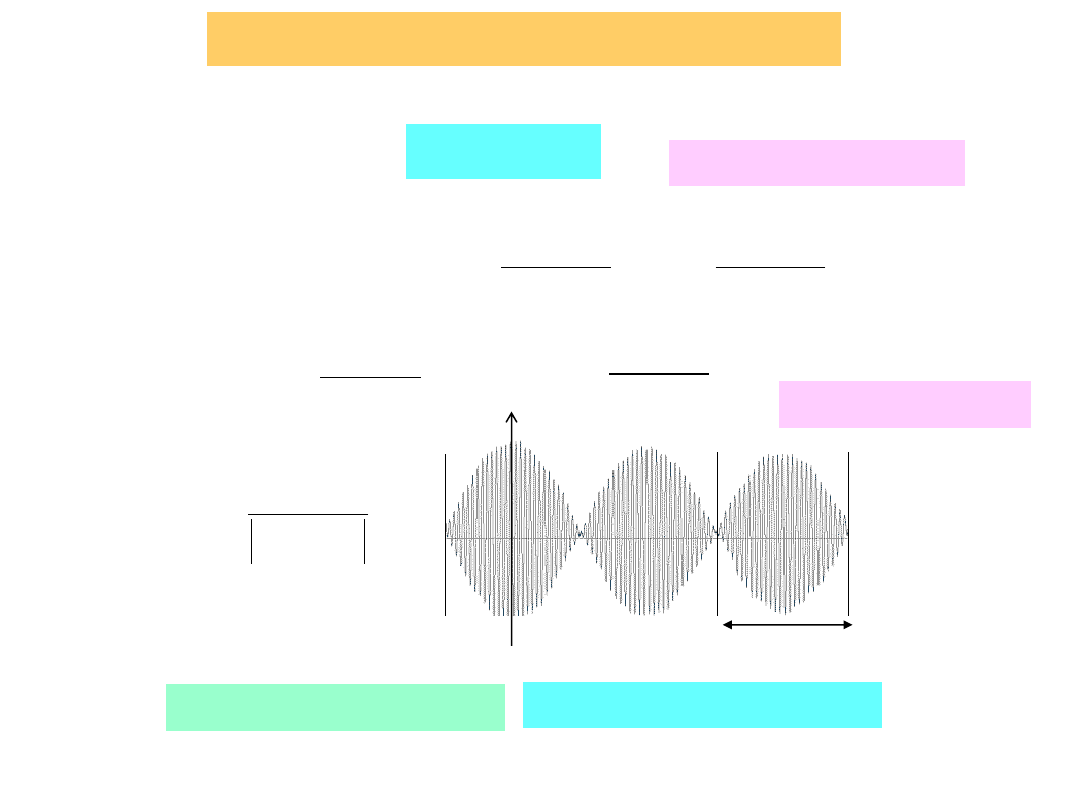
Gdy
1
i
2
niewiele się różnią
dudnienia
2
1
2
d
T
T
d
Modulacja amplitudowa
Zmienna amplituda C
Oznaczenia:
2
2
1
t
A
C
2
cos
2
2
1
t
C
x
sin
ruch periodyczny
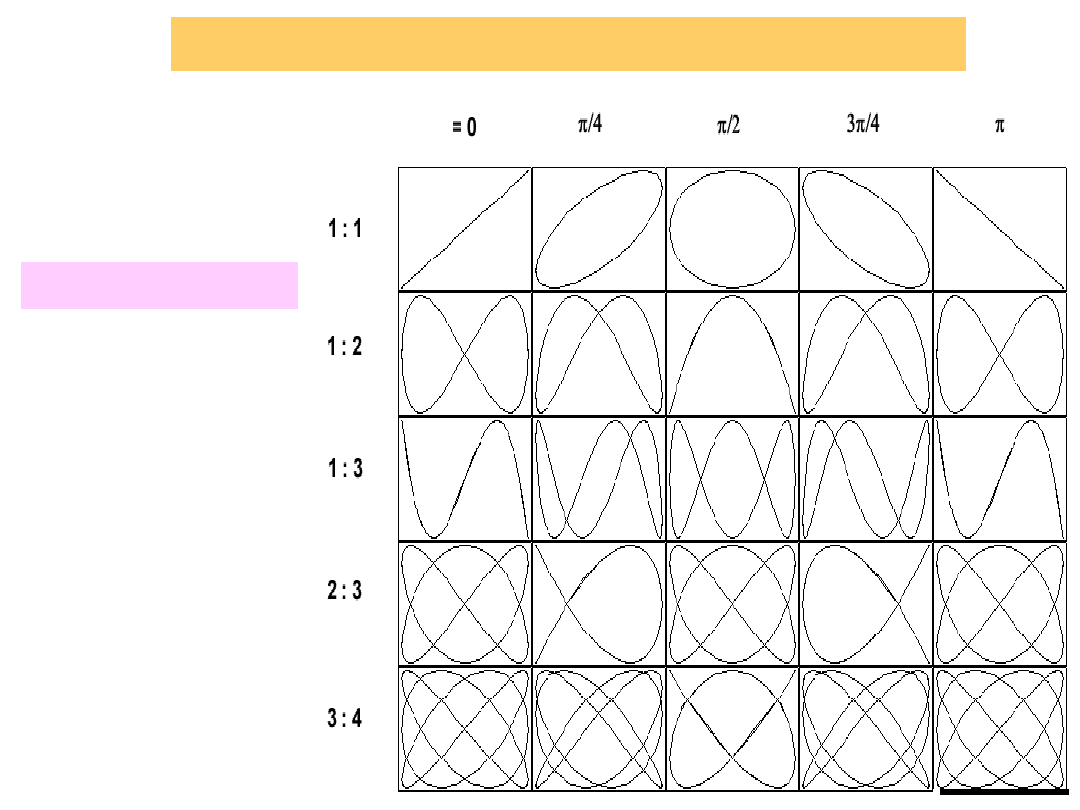
y
/
x
)
sin(
)
(
)
sin(
)
(
t
A
t
y
t
A
t
x
y
y
x
x
Krzywe Lissajous
Składanie drgań w kierunkach prostopadłych
Szczególne przypadki
)
sin(
)
(
)
sin(
)
(
t
A
t
y
t
A
t
x
y
x
odcinek linii prostej
x
A
A
y
x
y
x
=
y
=
,
=0
x
=
y
=
,
=
/2
)
cos(
)
2
sin(
)
(
)
sin(
)
(
t
A
t
A
t
y
t
A
t
x
y
y
x
1
2
2
2
2
x
y
A
x
A
y
elipsa
Wyszukiwarka
Podobne podstrony:
05 Drgania mechaniczne
05-drgania i fale, ▬ Studia Elektrotechnika - Politechnika, Fizyka
podrecznik 2 18 03 05
regul praw stan wyjątk 05
05 Badanie diagnostyczneid 5649 ppt
Podstawy zarządzania wykład rozdział 05
05 Odwzorowanie podstawowych obiektów rysunkowych
05 Instrukcje warunkoweid 5533 ppt
05 K5Z7
05 GEOLOGIA jezior iatr morza
05 IG 4id 5703 ppt
05 xml domid 5979 ppt
Świecie 14 05 2005
Wykł 05 Ruch drgający
więcej podobnych podstron