Część 1
8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH
1
8.
8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH
8.1. Analiza kinematyczna płaskiego układu tarcz sztywnych. Układy statycznie wyznaczalne
Rozważania należy rozpocząć od wyjaśnienia pojęcia stopni swobody. Liczbą stopni swobody danego
układu nazywamy liczbę niezależnych parametrów niezbędnych do jednoznacznego określenia możliwości jego
ruchu w przestrzeni. Swobodna tarcza na płaszczyźnie ma trzy stopnie swobody.
Aby układ był geometrycznie niezmienny, musi on zostać unieruchomiony. Jeżeli do układu
wprowadziliśmy tyle więzów ile ma stopni swobody, to po tym zabiegu liczba stopni swobody
s tego układu
będzie równa zeru:
s
=3t−r
(8.1)
gdzie:
t to liczba tarcz w układzie,
r to liczba więzów (liczba stopni swobody odebranych przez więzy).
Jednak o geometrycznej niezmienności nie decyduje wyłącznie liczba więzów. Istotny jest również
sposób połączenia układu (bryły) z podłożem.
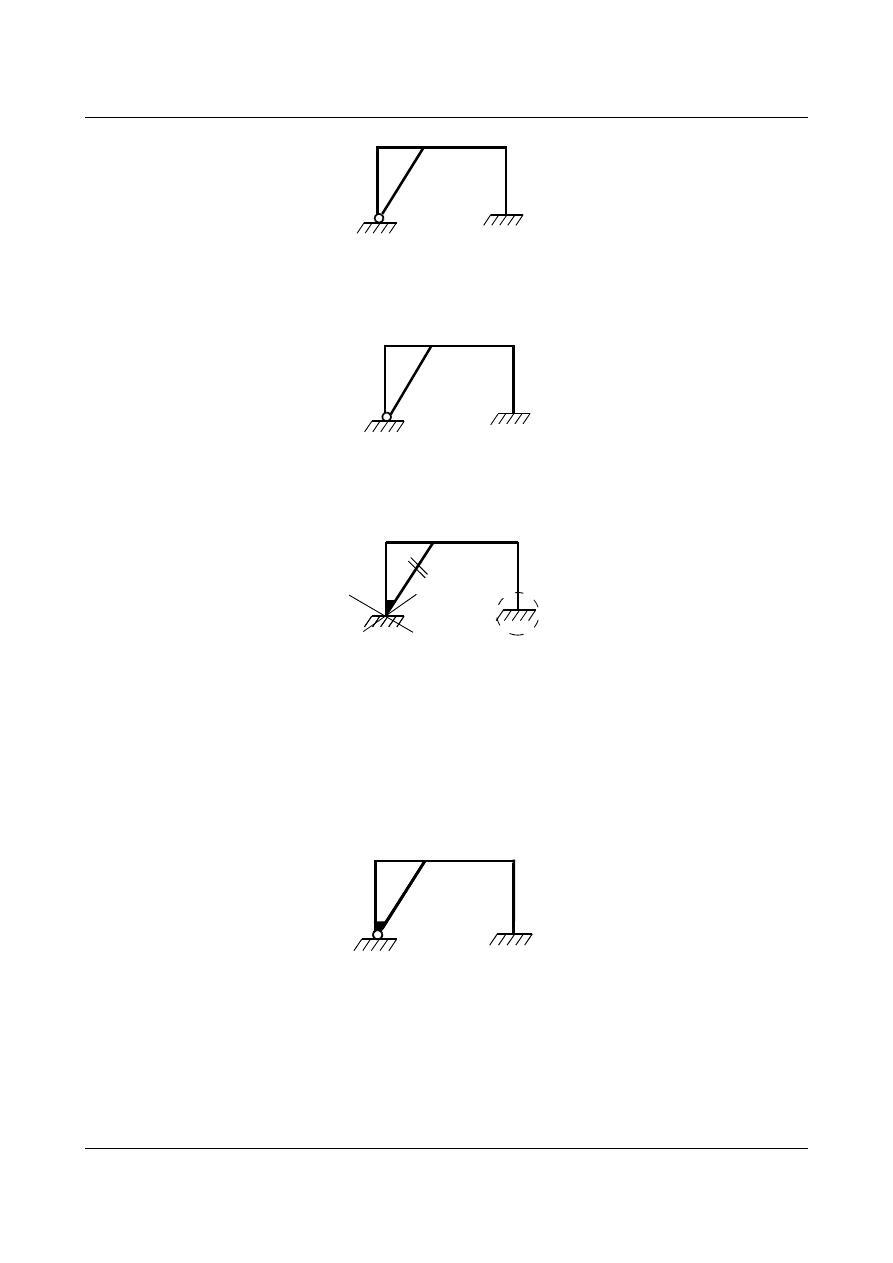
Wyjaśnijmy to na przykładach:
•
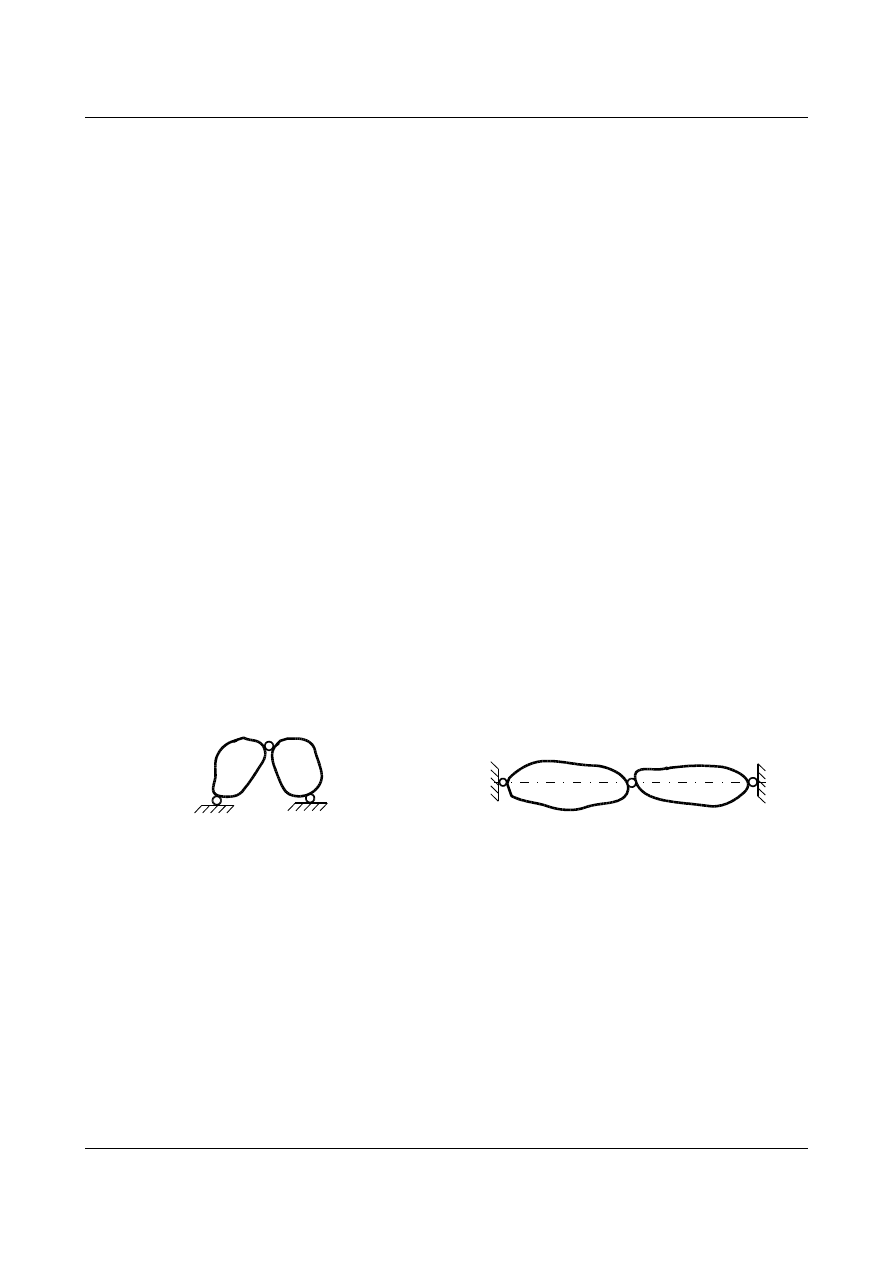
Układ trójprzegubowy składa się z dwóch tarcz i trzech przegubów. W zależności od położenia przegubów
układ jest niezmienny (rys. 8.1) lub zmienny (rys. 8.2).
Rys. 8.1. Układ trójprzegubowy
geometrycznie niezmienny
Rys. 8.2. Układ trójprzegubowy chwilowo geometrycznie
zmienny
s=0
Układ jest geometrycznie niezmienny.
s=0
Układ jest chwilowo geometrycznie zmienny, ponieważ
trzy przeguby leżą na jednej prostej.
•
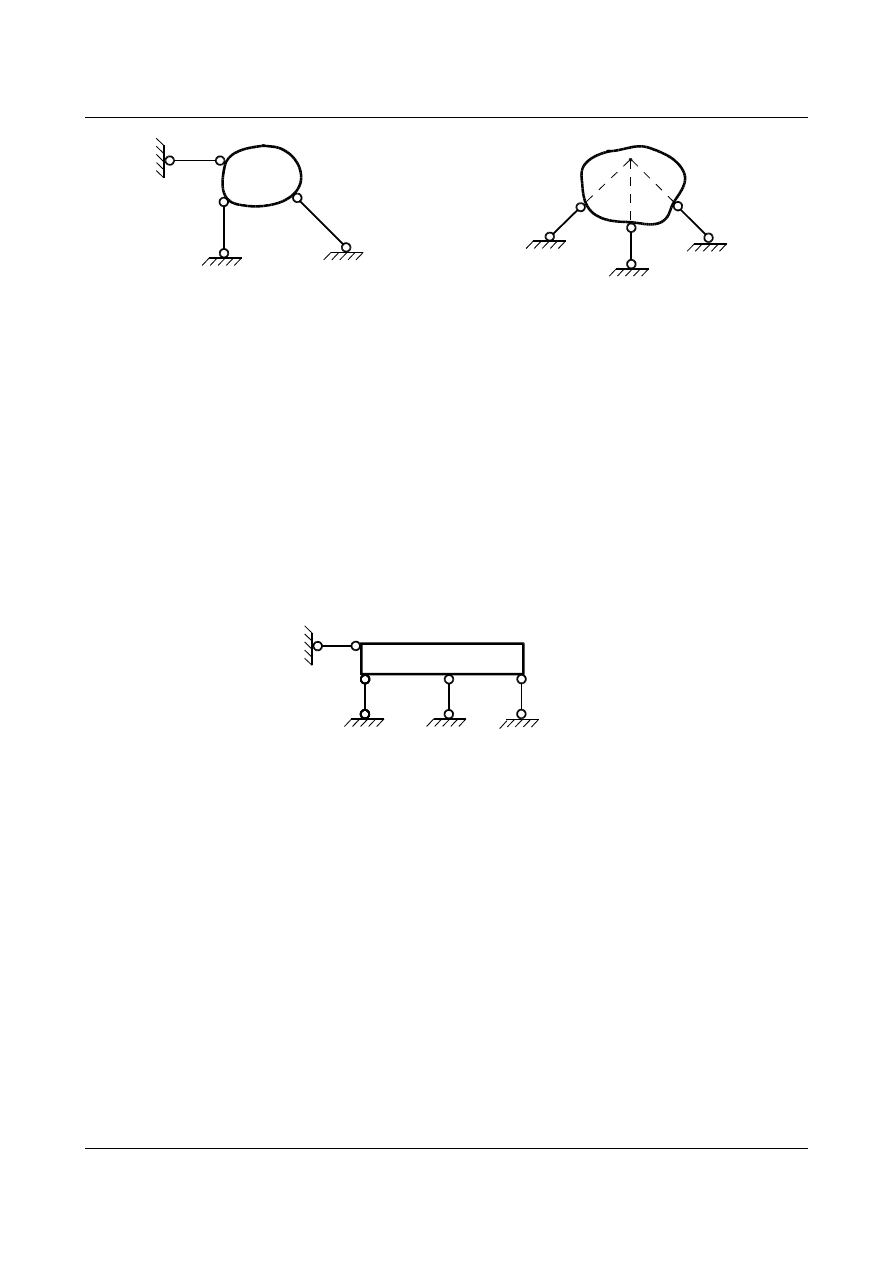
Tarcza połączona z podłożem za pomocą trzech prętów jest układem geometrycznie niezmiennym pod
warunkiem, że kierunki więzy nie przecinają się w jednym punkcie (rys. 8.3).
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH
2
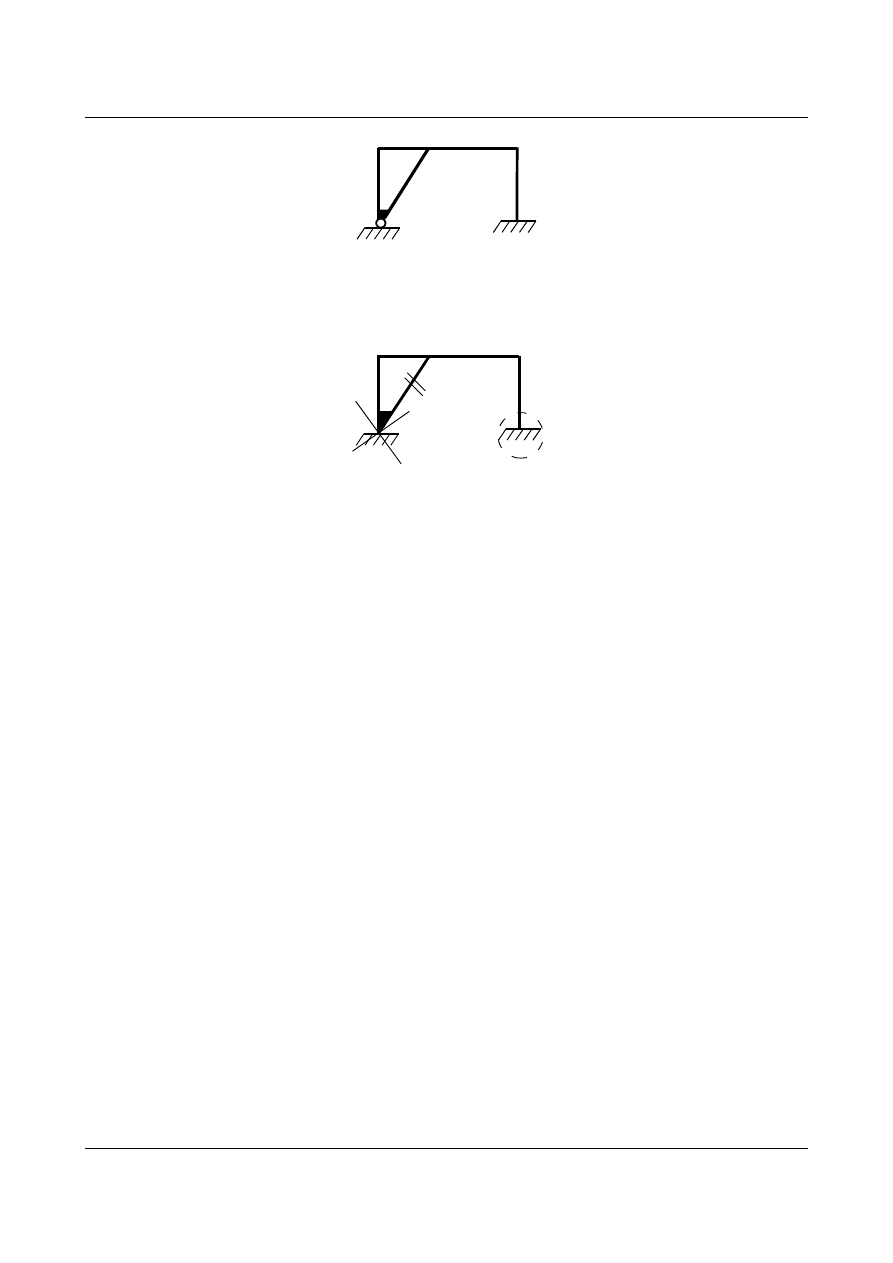
Rys. 8.3. Układ geometrycznie niezmienny
Rys. 8.4. Układ geometrycznie zmienny
s=0
Układ jest geometrycznie niezmienny.
s=0
Układ jest geometrycznie zmienny, ponieważ trzy pręty
przecinają się w jednym punkcie, tzn. istnieje biegun
chwilowego obrotu.
8.2. Układy statycznie niewyznaczalne
Aby zapisać warunki równowagi dowolnego układu sił na płaszczyźnie mamy do dyspozycji trzy
równania równowagi. Jeżeli liczba więzów jest większa od liczby równań równowagi, to taki układ określa się
jako statycznie niewyznaczalny.
Rys. 8.5. Przykład układu statycznie niewyznaczalnego
Stopnień statycznej niewyznaczalności
SSN, jest to liczba więzów jaką należałoby odrzucić, aby układ
stał się statycznie wyznaczalny. Więzy można odrzucić tylko w taki sposób, aby powstały układ był
geometrycznie niezmienny.
8.3. Określanie stopnia statycznej niewyznaczalności
8.3.1. Metoda I
Stopień statycznej niewyznaczalności SSN dla układów składających się z kilku tarcz połączonych
więzami można określić ze wzoru:
n
=SSN =r p
1
2 p
2
3 p
3
−2 w
2
3 w
3
(8.2)
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH
3
gdzie:
r - liczba reakcji (liczba więzów, prętów podporowych),
p
1
- liczba prętów zakończonych obustronnie przegubami (przesuwnymi i nie przesuwnymi),
p
2
- liczba prętów zakończonych z jednej strony przegubem, a z drugiej strony sprężyście zamocowanym
(wewnętrznie lub zewnętrznie utwierdzonym),
p
3
- liczba prętów obustronnie sprężyście zamocowanych (utwierdzonych zewnętrznie lub wewnętrznie),
w
2
- liczba węzłów przegubowych (węzeł to element konstrukcji, w którym spotykają się pręty), z
wyłączeniem przegubów wewnętrznych, tzw. dołączonych, czyli nie obejmujących wszystkich prętów
zbiegających się w tym węźle,
w
3
- liczba węzłów, w których zbiegają się sprężyście zamocowane pręty.
W
p
1
i
p
2
uwzględniamy również pręty, które łączą się z więzami podporowymi, także przesuwnymi. Do
w
2
i
w
3
wlicza się również więzy podporowe, przeguby, podpory przesuwne.
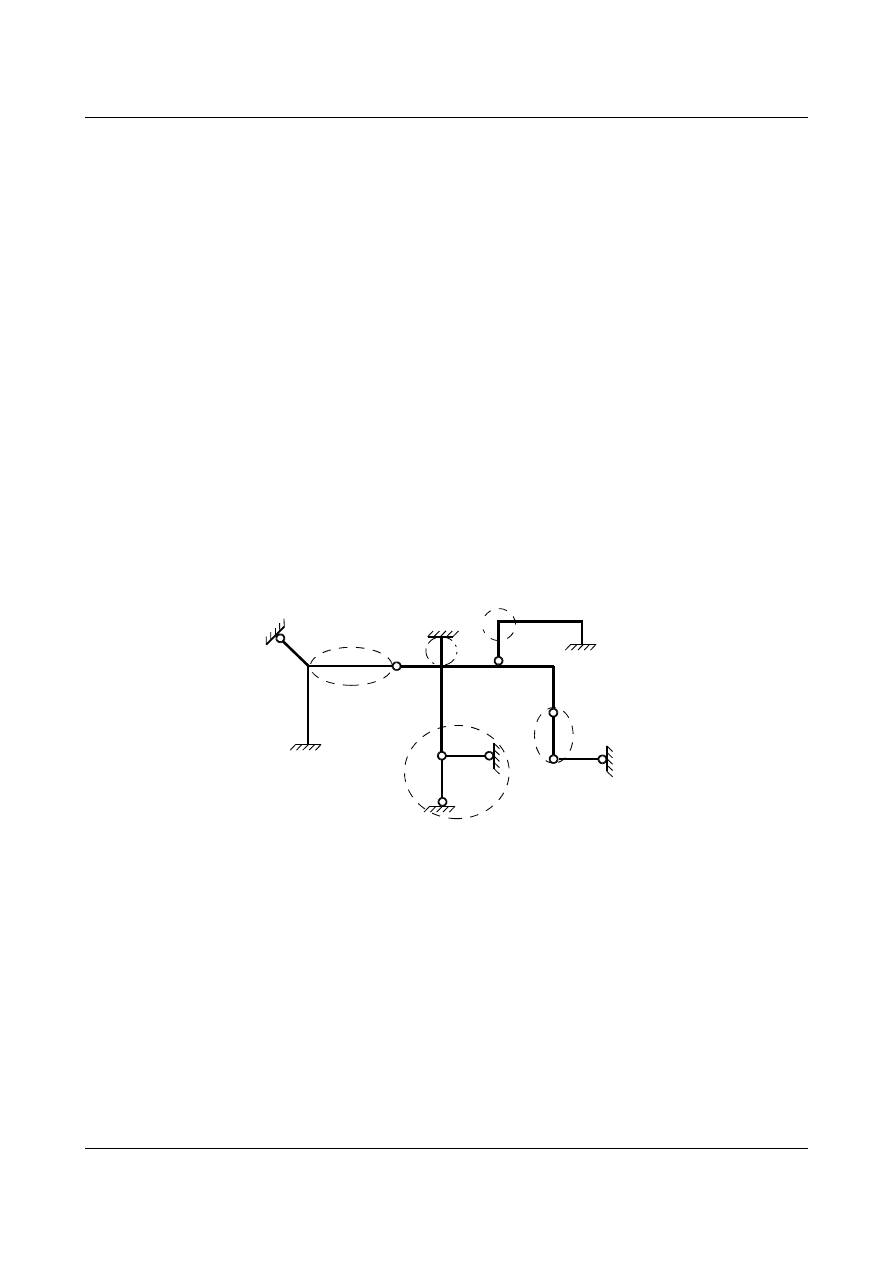
Przykład 1
Na rys 8.6 zaznaczono przypadki prętów typu
p
1
,
p
2
,
p
3
oraz przypadki węzłów typu
w
2
i
w
3
.
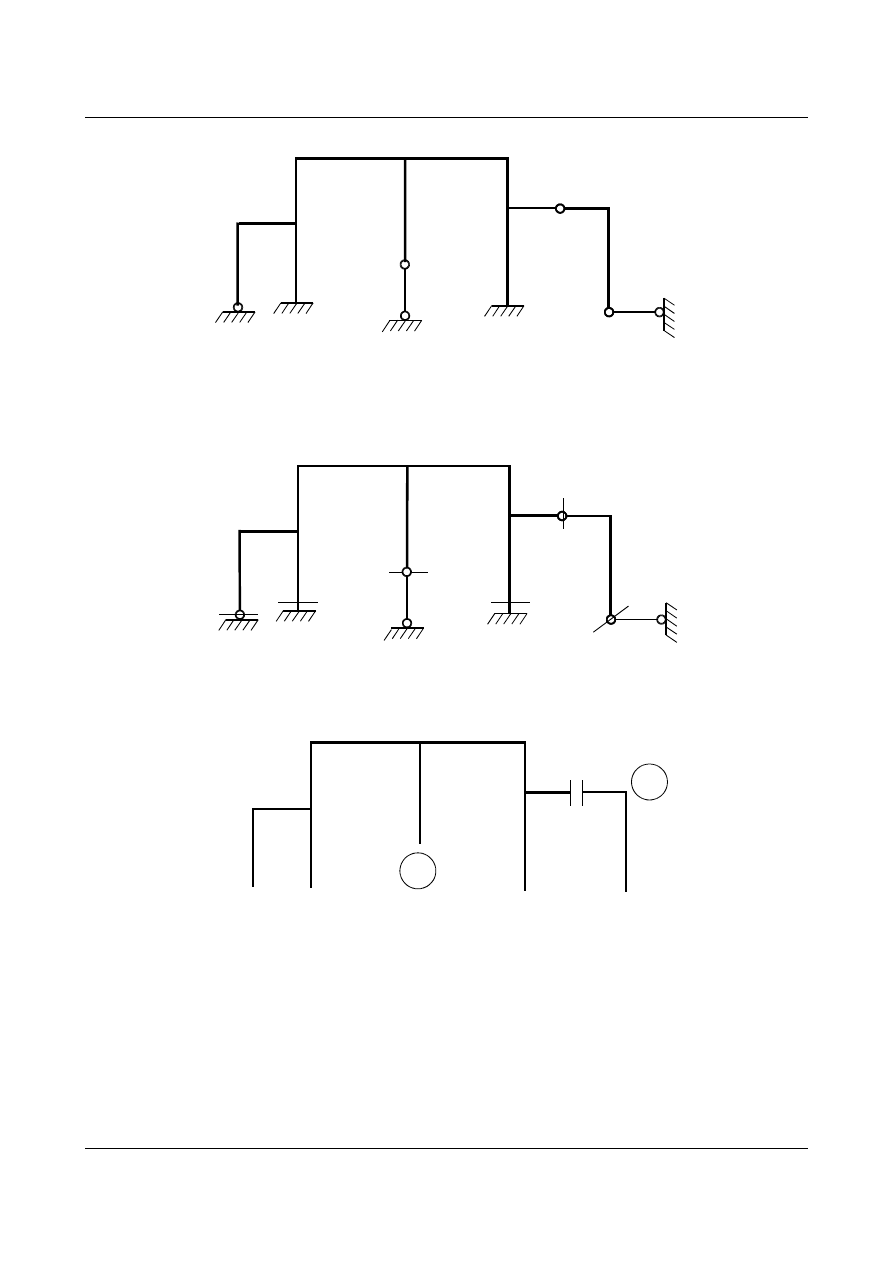
Rys. 8.6. Układ statycznie niewyznaczalny z różnymi rodzajami węzłów i prętów
p
2
p
3
p
1
w
2
w
3
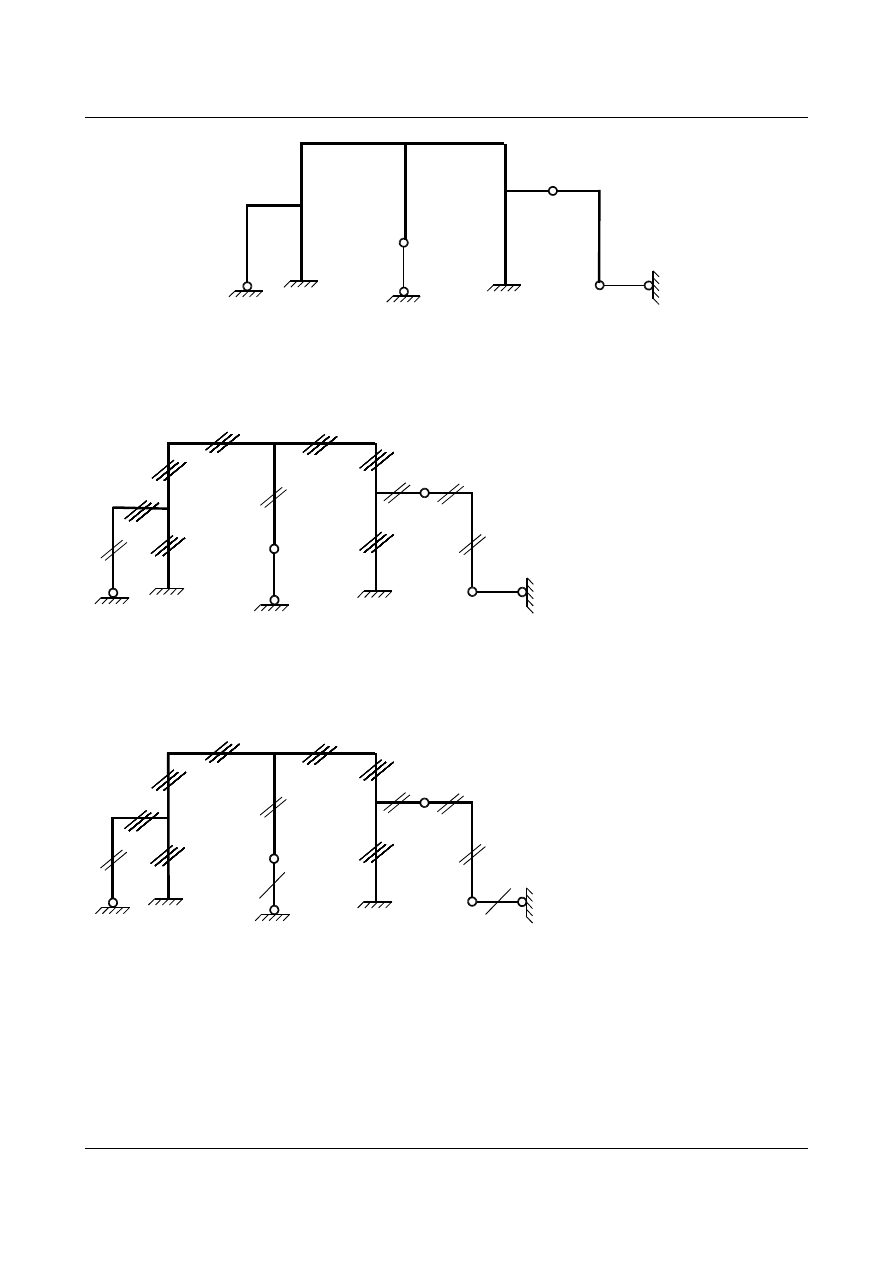
Zadanie 1
Określ stopień statycznej niewyznaczalności ramy podanej na schemacie.
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH
4
Zaznaczono pręty typu
p
2
dwoma kreskami, pręty typu
p
3
trzema kreskami. Liczbę reakcji w podporze
podajemy w nawiasie. Liczymy węzły i wyznaczamy
SSN:
(2)
(1)
(1)
(3)
(3)
r = 10
p
1
= 0
p
2
= 5
p
3
= 7
w
2
= 4
w
3
= 9
SSN=10+2·5+3·7–(2·4+3·9)=6
Podpory przesuwne można zaliczyć do prętów typu
p
1
. Wynik jest ten sam.
(2)
(2)
(2)
(3)
(3)
r = 12
p
1
= 2
p
2
= 5
p
3
= 7
w
2
= 6
w
3
= 9
SSN=12+2·5+3·7–(2·6+3·9)=6
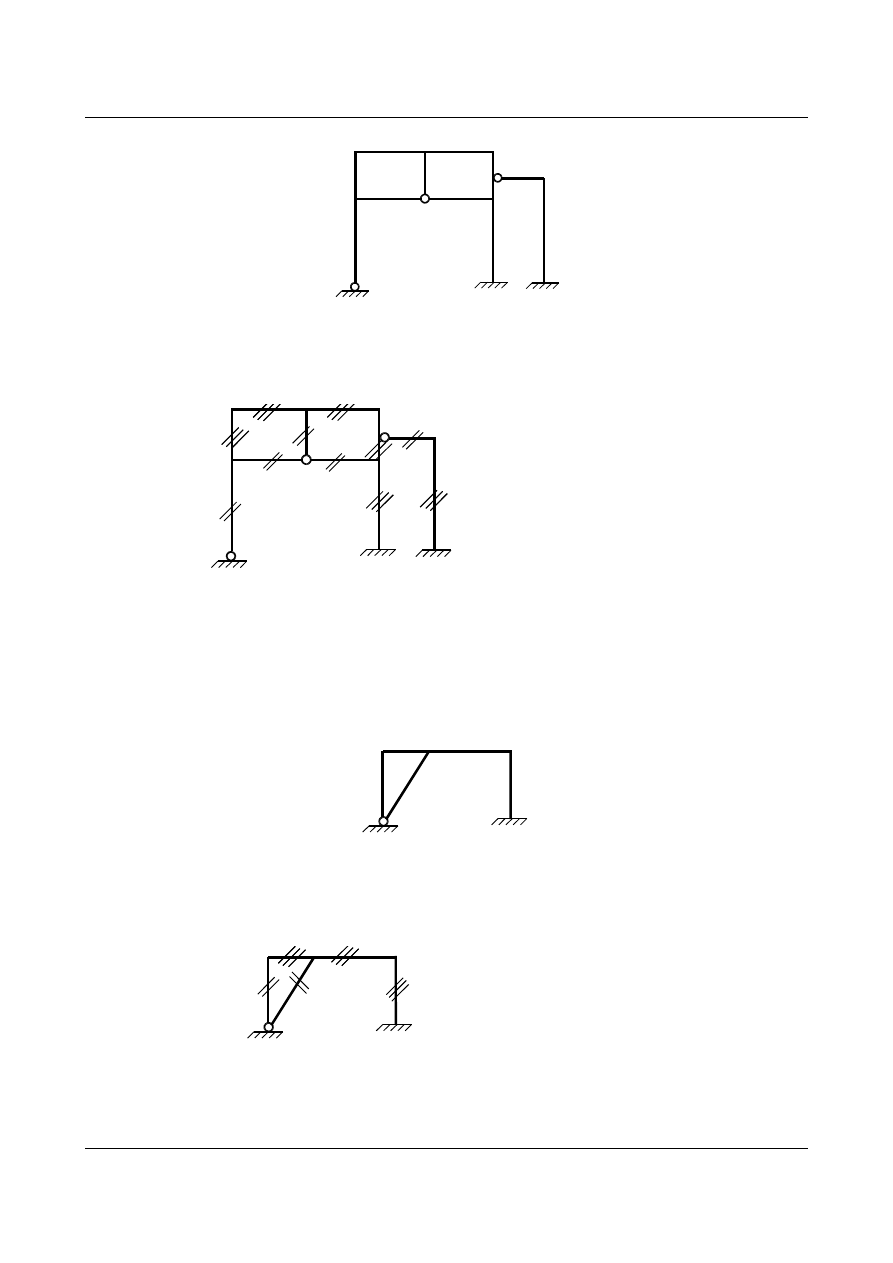
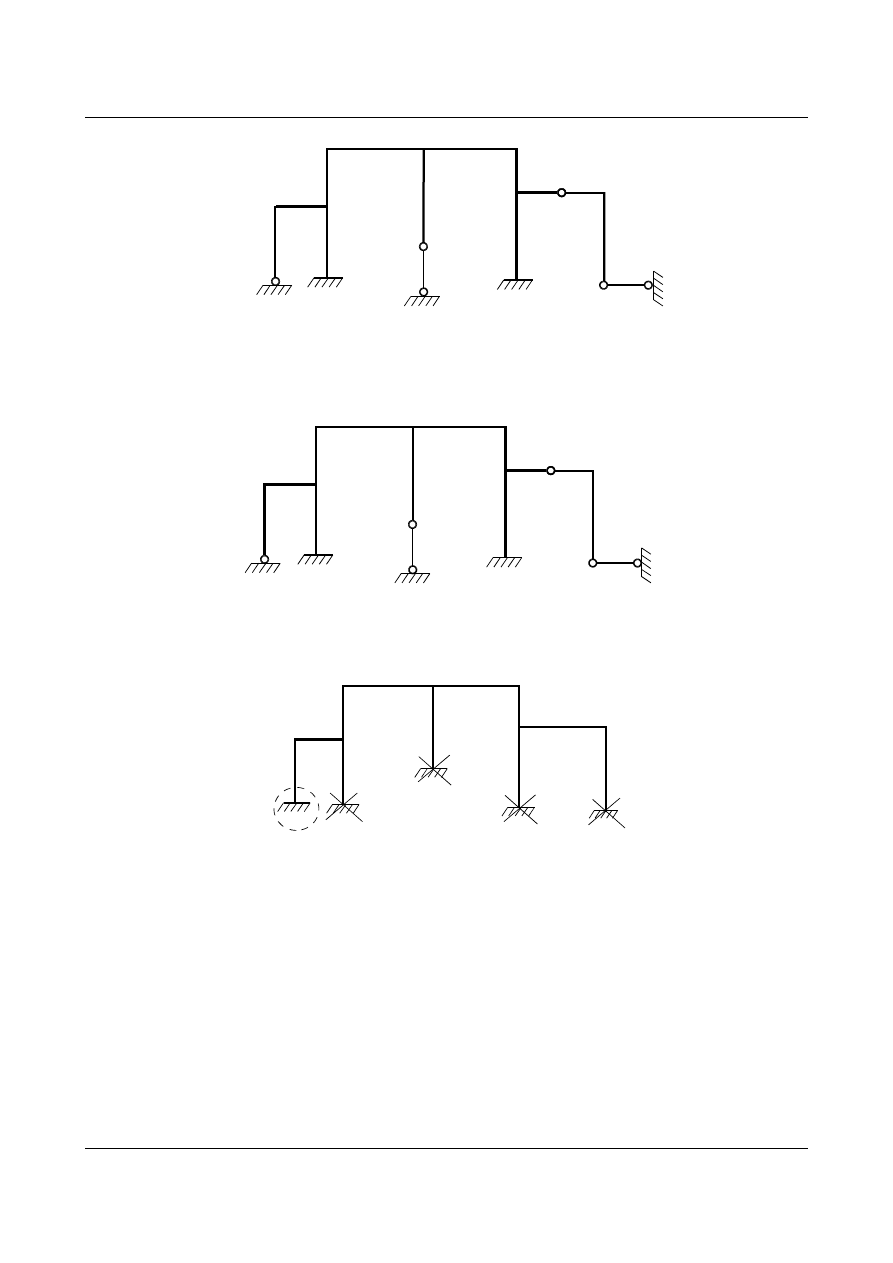
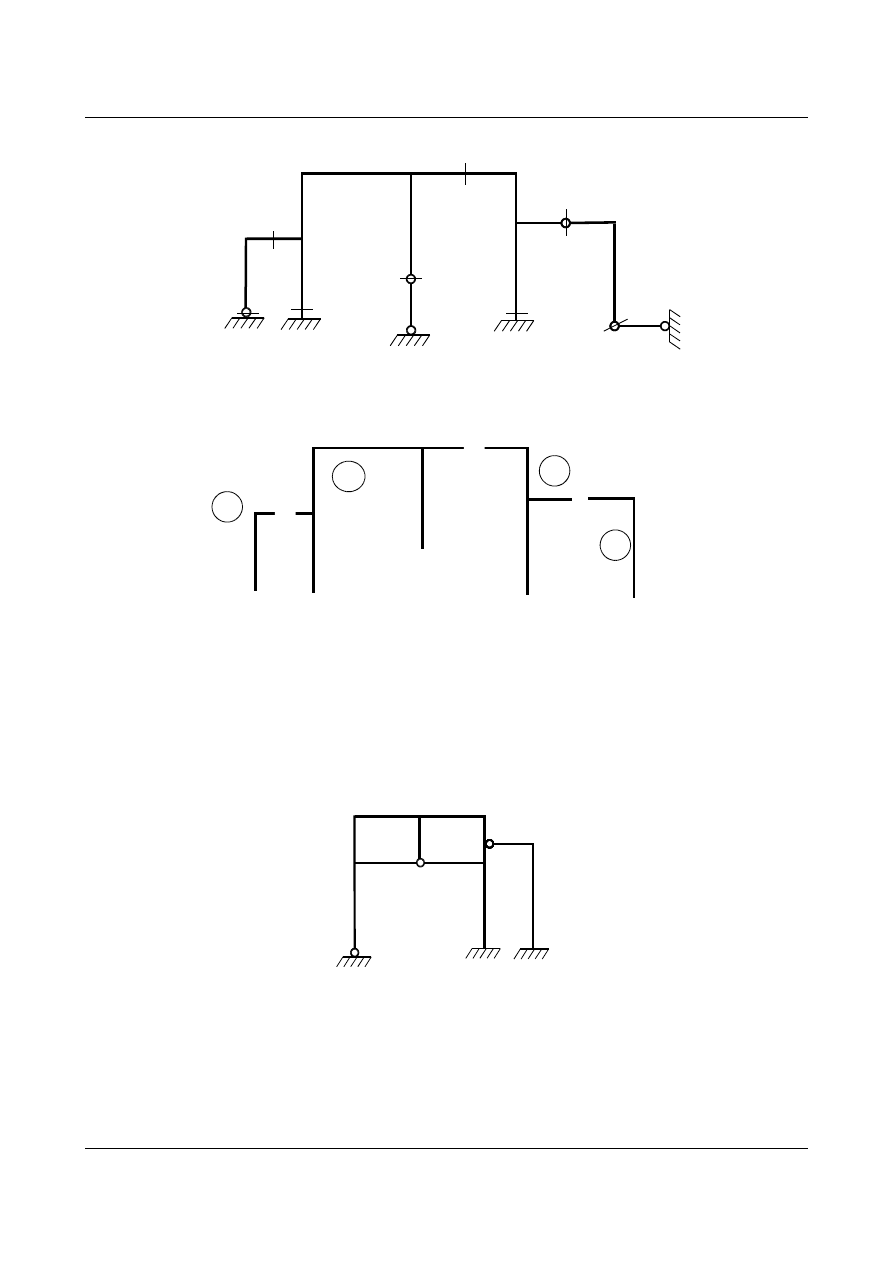
Zadanie 2
Określić stopień statycznej niewyznaczalności dla poniższego układu.
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH
5
Podobnie jak poprzednio oznaczamy pręty i reakcje.
(2)
(3)
(3)
r = 8
p
1
= 0
p
2
= 5
p
3
= 6
w
2
= 2
w
3
= 8
SSN=8+2·5+3·6–(2·2 + 3·8)=8
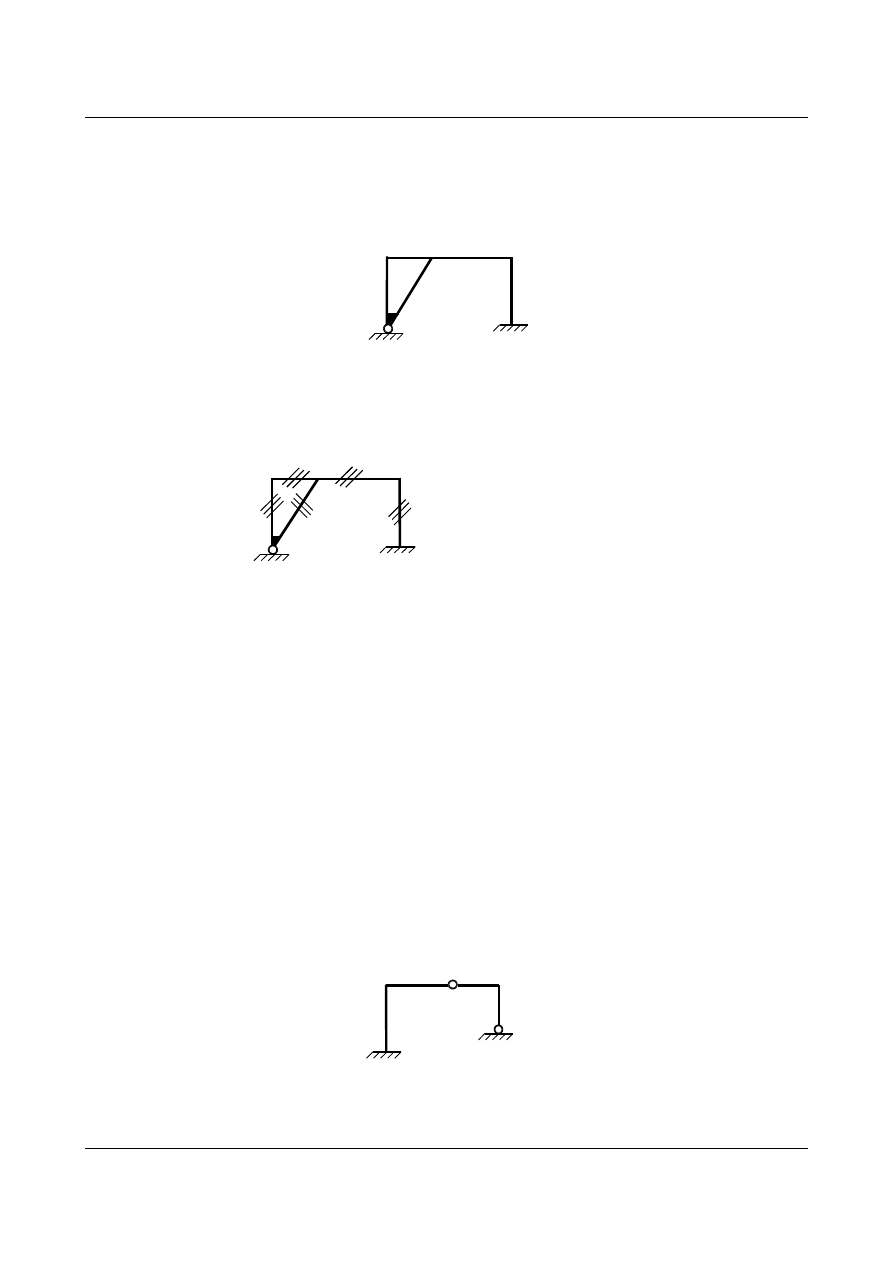
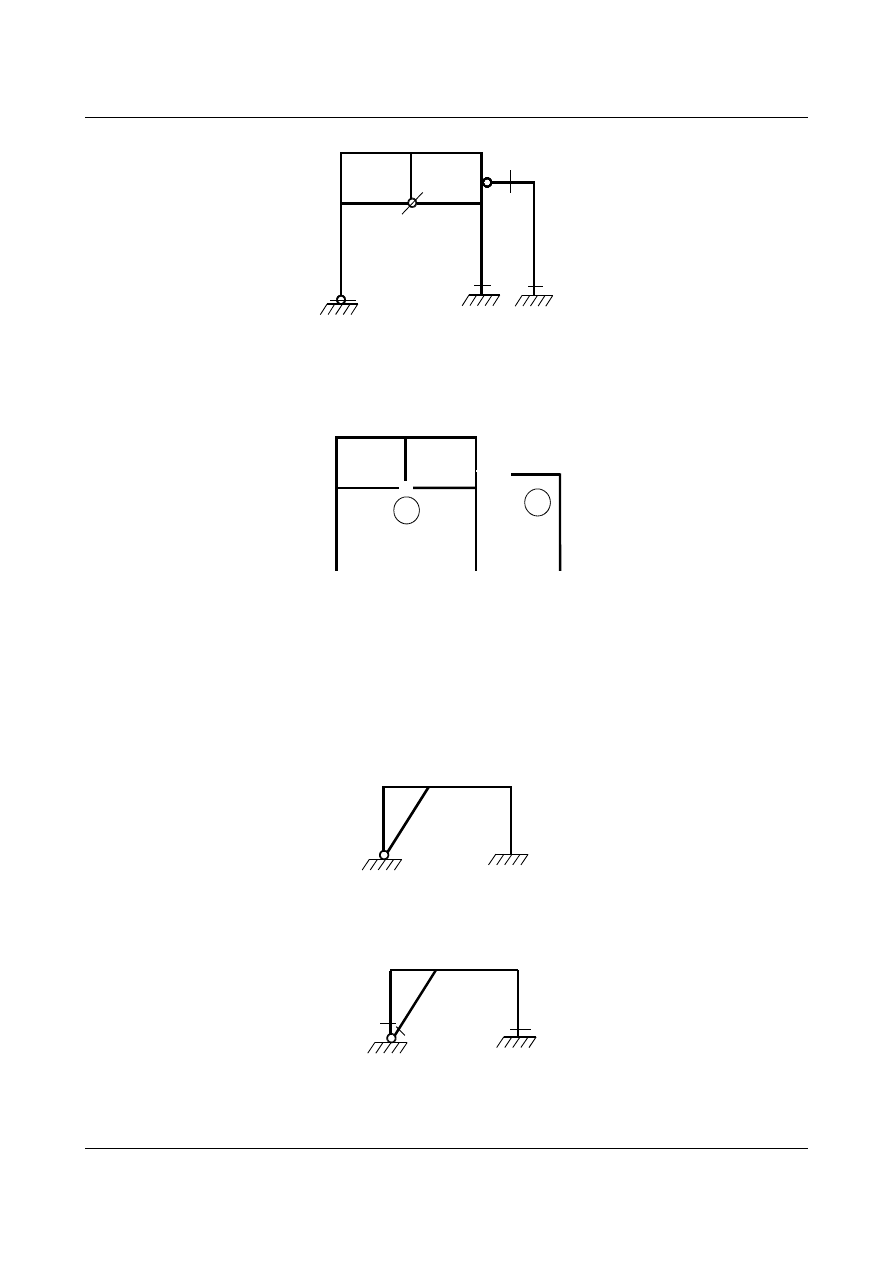
Zadanie 3
Określić stopień statycznej niewyznaczalności dla poniższego układu.
Zaznaczono typy prętów.
(3)
(2)
r = 5
p
1
= 0
p
2
= 2
p
3
= 3
w
2
= 1
w
3
= 4
SSN=5+2·2+3·3–(2·1+3·4)=4
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH
6
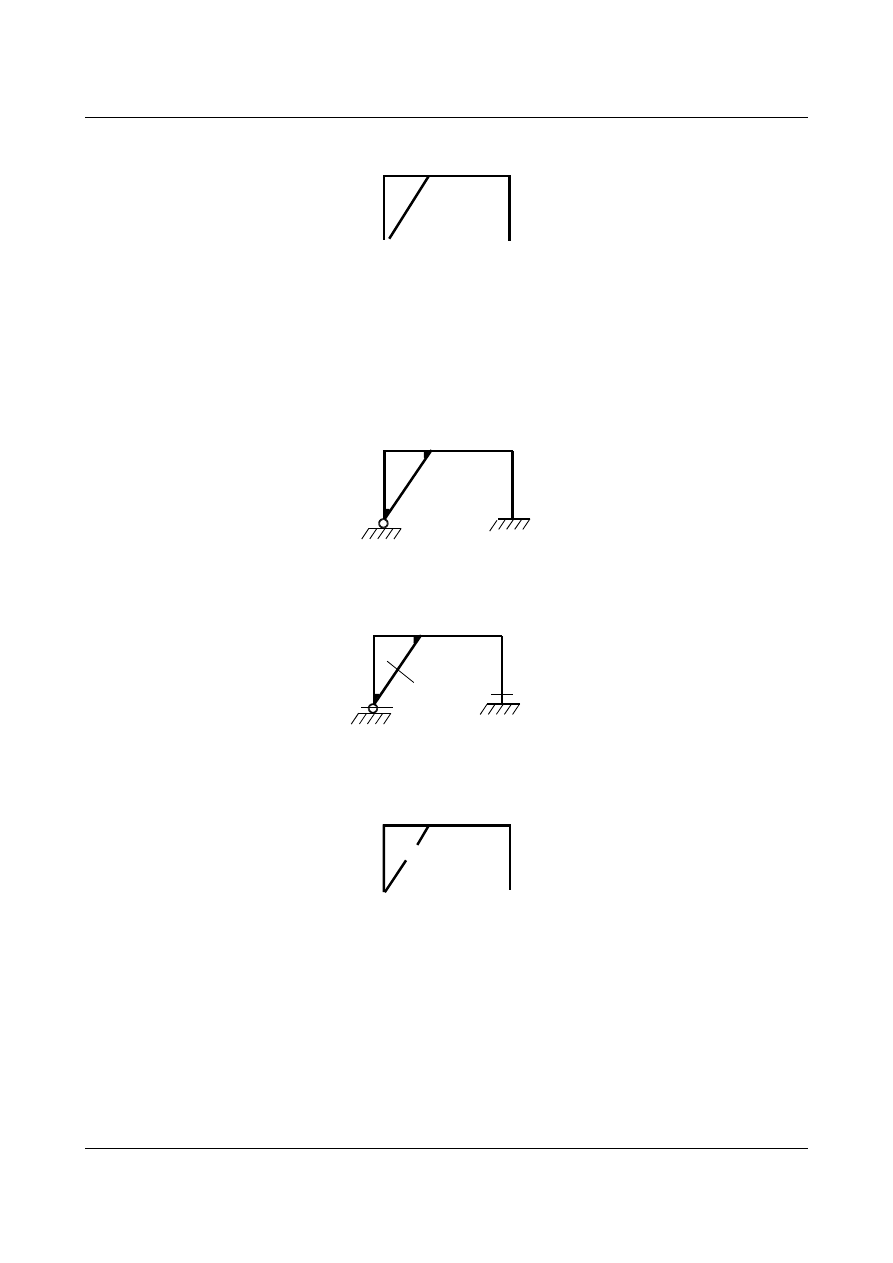
Zadanie 4
Określić stopień statycznej niewyznaczalności dla poniższego układu.
W ramie występują tylko pręty sprężyście zamocowane.
(2)
(3)
r = 5
p
1
= 0
p
2
= 0
p
3
= 5
w
2
= 0
w
3
= 5
SSN=5+3·5–(2·0+3·5)=5
8.3.2. Metoda II
Do ramy w miejsce przegubów wprowadzamy dodatkowe więzy utwierdzające przekroje stykające się z
przegubem, zamieniając w ten sposób podpory na utwierdzenia, a połączenia prętów na sprężyście
zamocowane (wewnętrznie utwierdzone). Określamy liczbę wprowadzonych dodatkowo więzów
d. Następnie
wyznaczamy stopnień statycznej niewyznaczalności nowego układu
N, odrzucając myślowo wszystkie
utwierdzenia z wyjątkiem jednego (w przypadku ram zamkniętych musimy “otworzyć” obieg).
Stopień statycznej niewyznaczalności układu wyjściowego
n jest różnicą:
n
=SSN =N −d
(8.3)
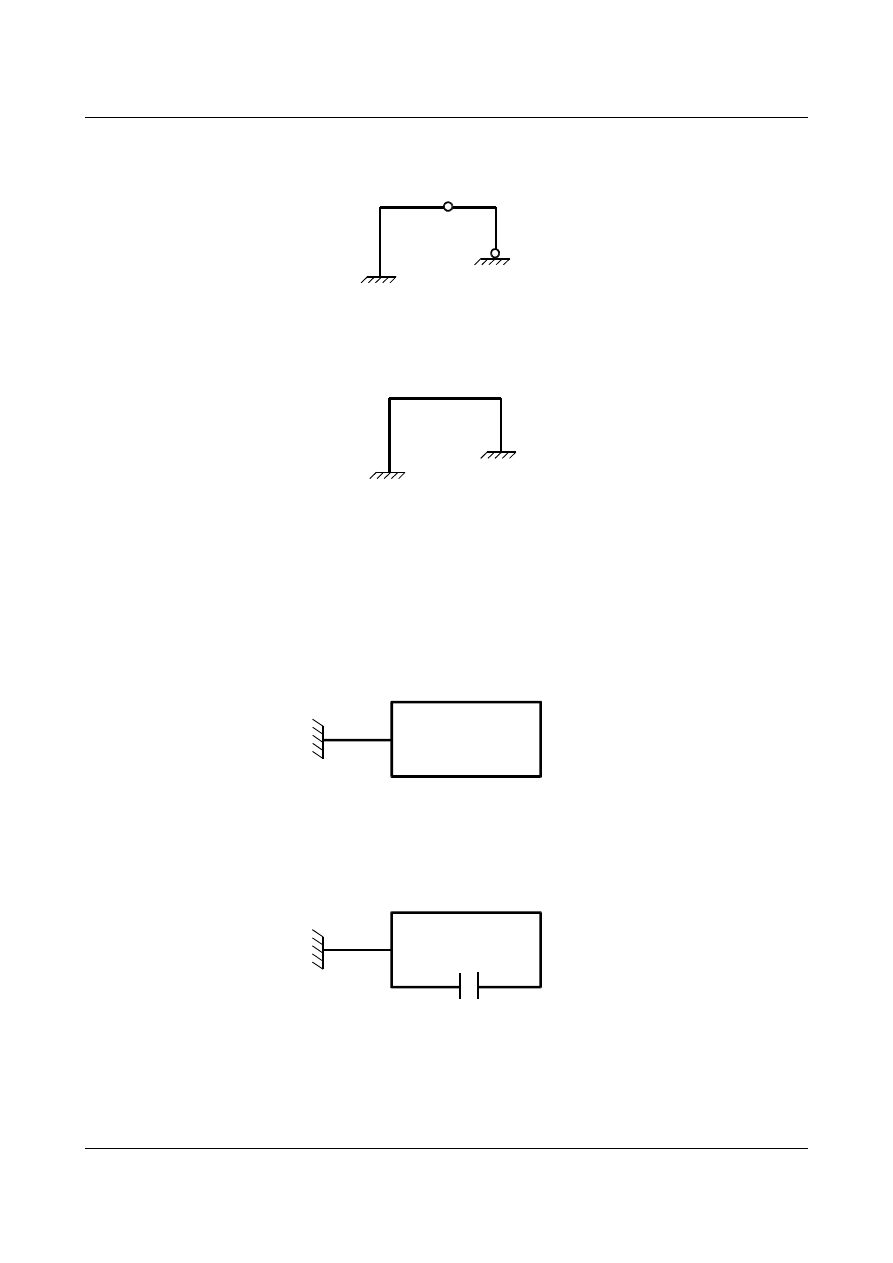
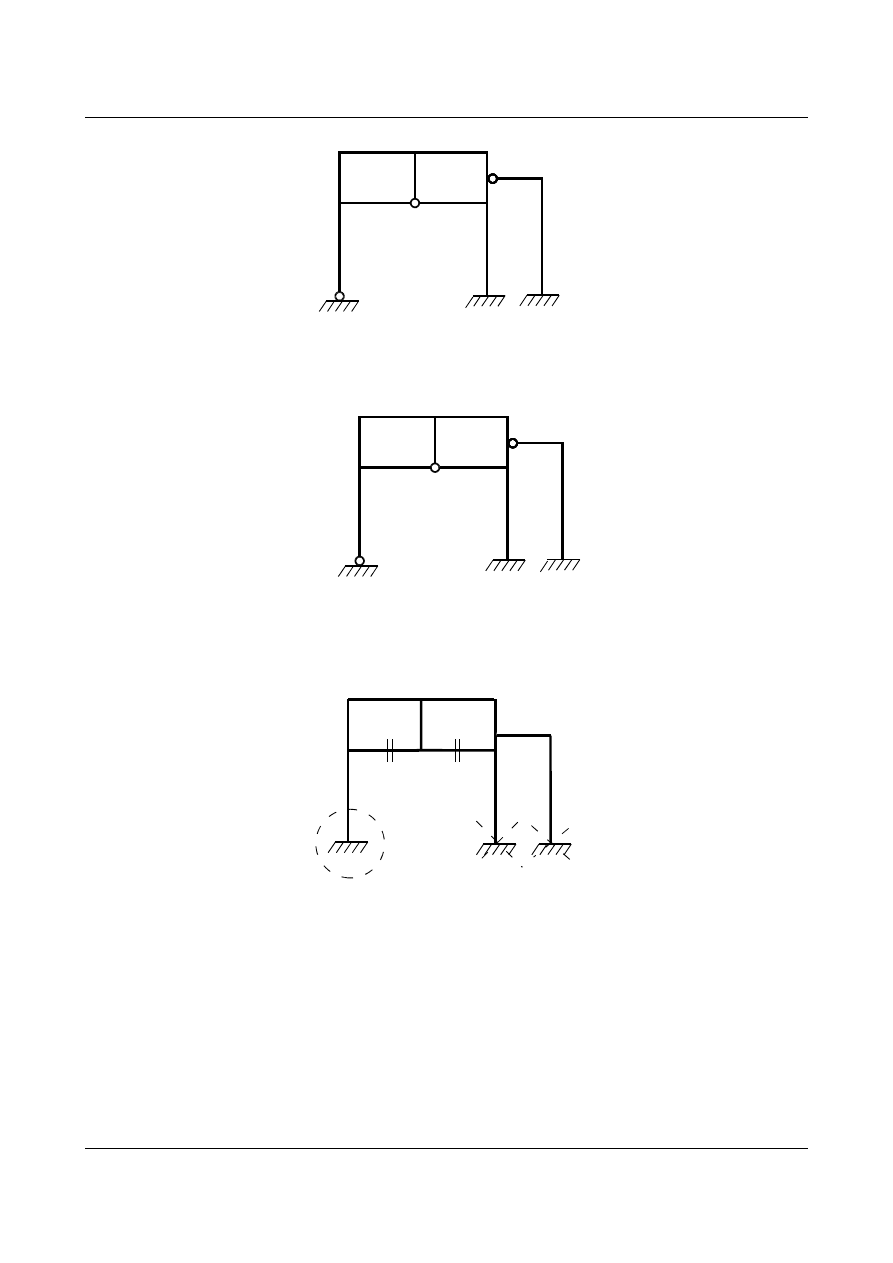
Przykład 2
W ramie o podanym schemacie należy wprowadzić dwa więzy (
d = 2), aby utwierdzić pręty.
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH
7
(+1)
(+1)
d=2
Nowy układ jest trzykrotnie statycznie niewyznaczalny (
N = 3).
N=3
Wobec tego wyjściowy układ jest 1-krotnie statycznie niewyznaczalny.
SSN = 3 – 2 = 1
Przykład 3
Pręty w ramie o podanym schemacie tworzą obieg “zamknięty”.
Aby uzyskać układ statycznie wyznaczalny należy przeciąć obieg (każde przecięcie daje 3 stopnie statycznej
niewyznaczalności
SSN = 3.
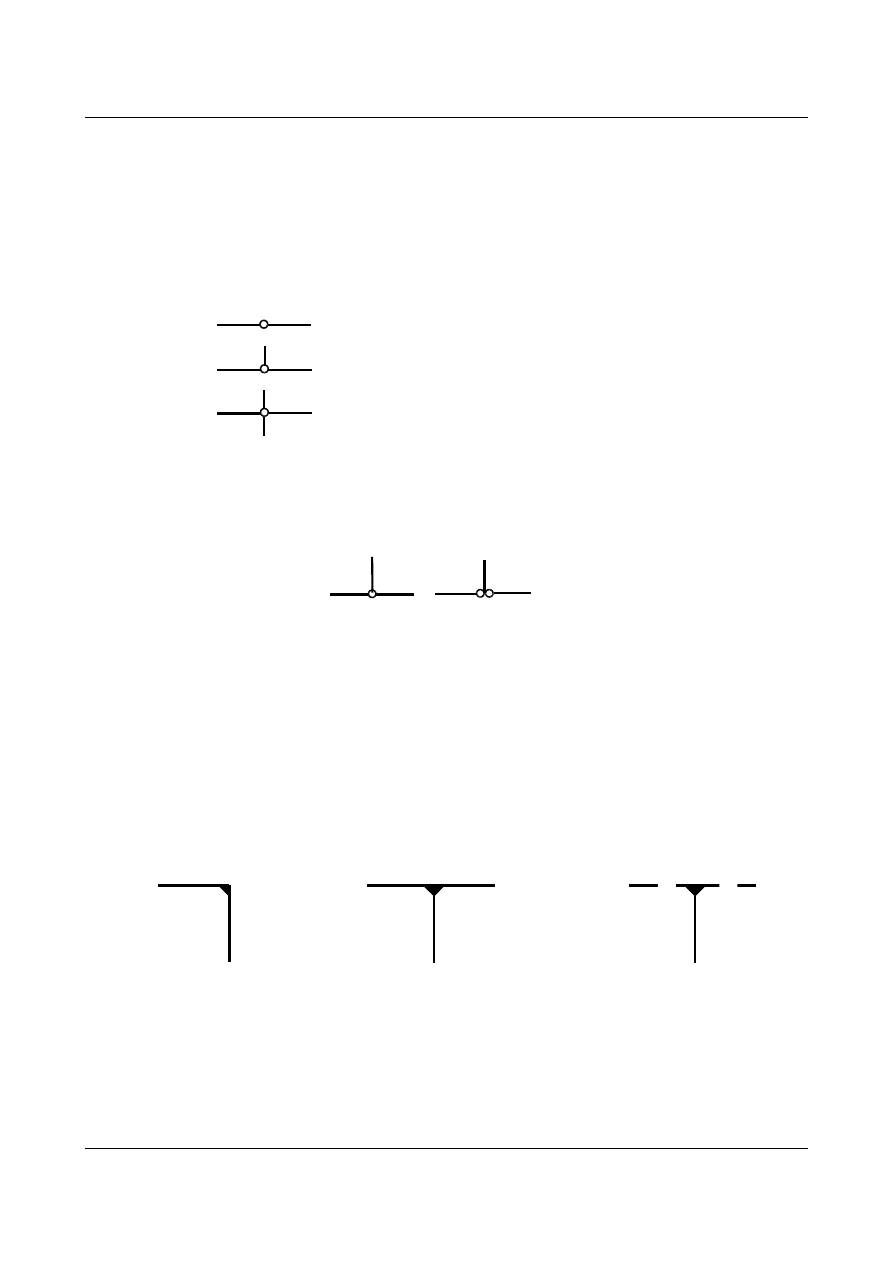
Jeżeli w przegubie wewnętrznym zbiegają się więcej niż dwa pręty, to taki przegub nazywamy
wielokrotnym. Liczbę sił w przegubie (niezależnych) określa wzór:
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH
8
S
k
=2 ⋅k −1
(8.4)
gdzie:
k - liczba prętów w przegubie.
W przegubie, w którym zbiegają się 2, 3, 4 pręty liczba niezależnych sił wynosi odpowiednio 2, 4 i 6.
S
2
=2 ⋅2−1=2
S
3
=2 ⋅3−1=4
S
4
=2 ⋅4−1=6
Jeżeli w przegubie spotykają się trzy pręty, to możemy zastąpić ten węzeł w taki sposób jak na
poniższym rysunku.
=
Wobec tego, aby usztywnić ten węzeł należy wprowadzić dwa więzy (
d = 2).
W przypadku prętów sprężyście zamocowanych liczbę sił niezależnych można określić według
zależności:
S
k
=3 ⋅k−1
(8.4)
Dla przykładu:
3 siły wewnętrzne
=
6 sił wewnętrznych
(3)
(3)
Zadanie 5
Określić stopień statycznej niewyznaczalności dla poniższego układu.
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH
9
Wprowadzamy dodatkowe więzy aby usztywnić połączenia (
d = 6). W nawiasach podano dodatkowe więzy w
poszczególnych węzłach.
(+2)
(+1)
(+2)
(+1)
(+2)
(+1)
Odrzucamy sztywne podpory pozostawiając jedną (
N = 4·3 = 12)
Ostatecznie SSN wynosi
n = SSN = 12 - 6 = 6
Zadanie 6
Określić stopień statycznej niewyznaczalności dla poniższego układu.
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH
10
Wprowadzamy dodatkowe więzy (
d = 4).
(+1)
(+1)
(+2)
Następnie, aby otrzymać układ statycznie wyznaczalny odrzucamy dwie podpory i przecinamy ramę w dwóch
miejscach. (
N = 2·3 + 2·3 = 12)
Stopień statycznej niewyznaczalności SSN wynosi
n = SSN = 12 - 4 = 8
Zadanie 7
Określić stopień statycznej niewyznaczalności dla poniższego układu.
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH
11
Aby usztywnić każdy z prętów należy wprowadzić dwa więzy (
d = 2), po jednym dla każdego pręta.
(+2)
Dalej likwidujemy jedną podporę i przecinamy ramę (
N = 3 +3 = 6)
Ostatecznie
SSN = 6 – 2 = 4
Zadanie 8
Określić stopień statycznej niewyznaczalności dla poniższego układu.
Pręty są ze sobą sztywno połączone, wystarczy jeden dodatkowy więz podporowy (
d = 1)
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH
12
(+1)
Dalej odrzucamy podporę i “otwieramy” obieg (
N = 3 + 3 = 6)
SSN = 6 – 1 = 5
8.3.3. Metoda III
Ramę zamieniamy poprzez myślowe “cięcia” (przecięcia prętów na kawałki) na pojedyncze tarcze.
Poprzez tarczę rozumiemy pojedynczy pręt lub grupę prętów połączonych ze sobą, o trzech stopniach
swobody. Stopnień statycznej niewyznaczalności określamy ze wzoru:
n
=SSN =c−3⋅t
(8.5)
gdzie:
c - liczba cięć, równa się liczbie odebranych więzów,
t - to liczba pojedynczych prętów lub grup prętów.
Zadanie 9
Określić stopień statycznej niewyznaczalności dla poniższego układu.
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH
13
Przecinając pręt sztywny likwidujemy trzy więzy, przecinając przegub dwa więzy, a odcinając podporę
przegubowo przesuwną jeden więz. W nawiasach podano liczbę “przecinanych” więzów.
(2)
(3)
(1)
(3)
(1)
(2)
Po tym zabiegu powstają dwie swobodne tarcze (
t = 2).
I
II
Tak więc
n = SSN = 12 – 3·2 = 6
Innym sposobem rozwiązania tego zadania jest podział układu na cztery tarcze (
t = 4)
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH
14
(1)
(2)
(1)
(3)
(3)
(2)
(3)
(3)
Liczba niezbędnych cięć wyniosła 18 (
c = 18)
I
IV
III
II
Ostatecznie
n = SSN = 18 – 3·4 =6
Zadanie 10
Określić stopień statycznej niewyznaczalności dla poniższego układu.
W podobny sposób jak w poprzednim zadaniu tniemy ramę na pojedyncze tarcze. W przegubie wielokrotnym
odłączamy wszystkie pręty od siebie (likwidujemy wszystkie więzy).
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH
15
(2)
(3)
(4)
(3)
(2)
Liczba niezbędnych cięć wyniosła 14 (
c = 14), a liczba uzyskanych poprzez te cięcia tarcz jest równa 2
(
t = 2)
II
I
Ostatecznie
n = SSN = 14 – 3·2 =8
Zadanie 11
Określić stopień statycznej niewyznaczalności dla poniższego układu.
Tniemy ramę tak, aby uzyskać jedną tarczę.
(3)
(2)
(2)
Wykonaliśmy 7 cięć więzów (
c = 7), przez co otrzymaliśmy 1 tarczę (t = 1).
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
8. ANALIZA KINEMATYCZNA I STATYCZNA USTROJÓW PRĘTOWYCH
16
A zatem
n = SSN = 7 – 3·1 = 4
Zadanie 12
Określić stopień statycznej niewyznaczalności dla poniższego układu.
Tniemy ramę w trzech miejscach.
(2)
(3)
(3)
Wykonaliśmy 8 cięć więzów (
c = 8), przez co otrzymaliśmy 1 tarczę (t = 1).
Ostatecznie
n = SSN = 8 – 3·1 = 5
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Wyszukiwarka
Podobne podstrony:
2003 08 12
2015 08 20 08 12 50 01
08 12 2015 wyk 5
08 (12)
08.12.06r. Socjologia, Semestr I, Socjologia
msg 08 12 17
ECTS Hotelarstwo - M. Chroboczynska Z. Witkiewicz - 08.12.08(1), Turystyka, technik hotelarstwa, hot
Emisja głosu, 07.08.12
Fizyka 08.12.08, Fizyka
P Społeczna TreściWord, 9. p społeczna 08.12.2010, PSYCHOLOGIA SPOŁECZNA - wykład, dn
Higiena ZOZ, Ust Zoz DzU07.14.89 skrót, Stan prawny: 2008-08-12
9. Sieci i Internet (08.12.08), SIECI I INTERNET
Podstawy psychologii - wyklad 08 [12.10.2001], ☆♥☆Coś co mnie kręci psychologia
18.08.12.2011, 08-12-2011
Eksplozje w Bagdadzie Ponad 101 ofiar (08 12 2009)
2015 08 20 08 12 39 01
2001 08 12
msg 08 12 03
08 12 86
więcej podobnych podstron