Michał Grudziński
grupa 24A
Marcin Krawiec
Roboty przemysłowe laboratorium 2
Model geometryczny manipulatora robota przemysłowego
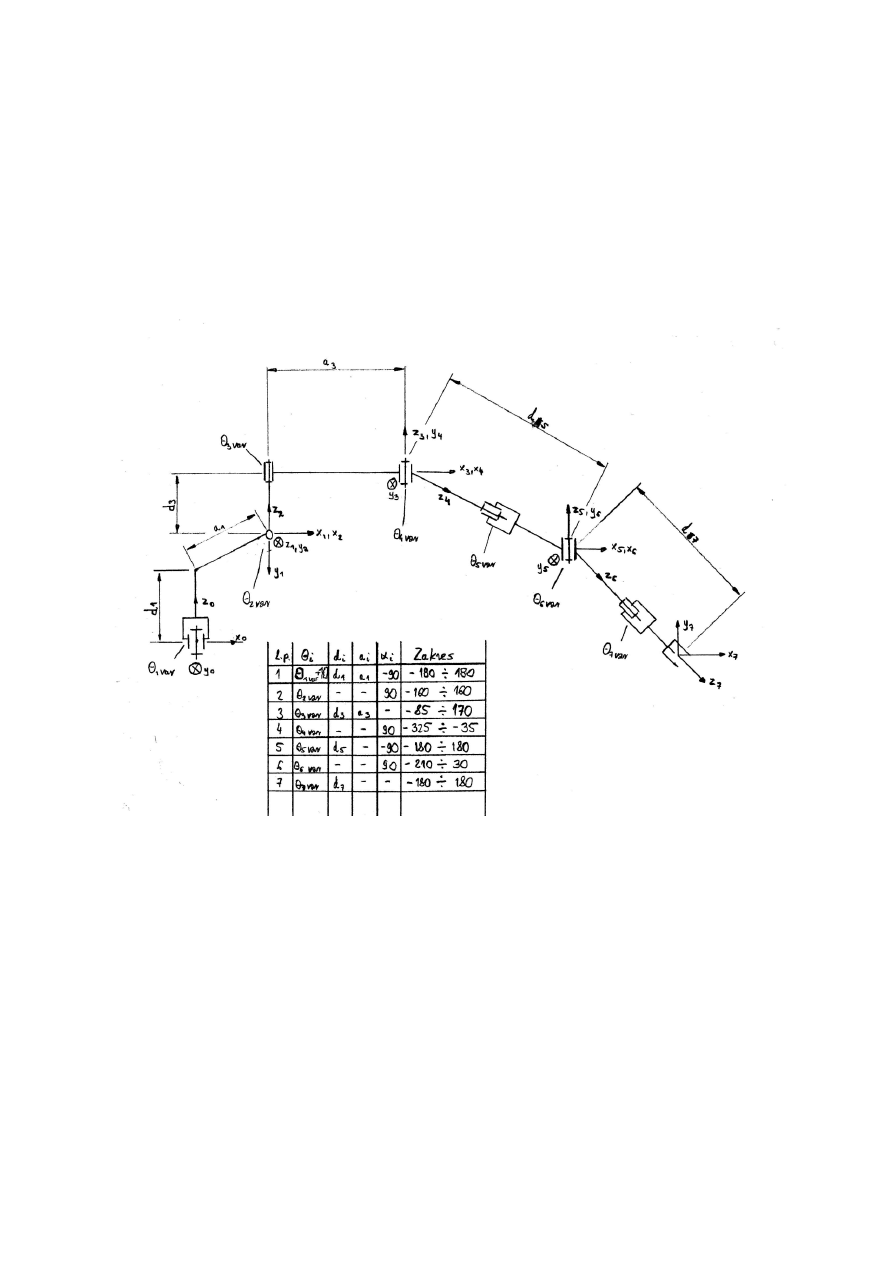
1. Schemat kinematyczny robota MOTOMAN – DA20
2. Tabela parametrów powyższego robota
3. Program wyznaczający macierze opisującą położenie i orientację efektora
% skrypt wylicza macierz przekształcenia jednorodnego
clear
all
% deklaracja symboli występujących w modelu
% zmienne qi tworzone są tylko dla współrzędnych obrotowych
syms
th1
th2
th3
th4
th5
th6
th7
d1
d3
d5
d7
a1
a3
syms
q1
q2
q3
q4
q5
q6
q7
% wyznaczenie symbolicznej postaci macierzy - funkcja mA
A1=mA(th1+sym(pi/18),d1,a1,sym(-pi/2))
A2=mA(th2,0,0,sym(pi/2))
A3=mA(th3,d3,a3,0)
A4=mA(th4,0,0,sym(pi/2))
A5=mA(th5,d5,0,sym(-pi/2))
A6=mA(th6,0,0,sym(pi/2))
A7=mA(th7,d7,0,0)
% mnozenie macierzy
T07=A1*A2*A3*A4*A5*A6*A7
% podstawienie nowych zmiennych za obrotowe zmienne złączowe
% do upraszczania zapisu macierzy przekształcenia jednorodnego
% zmienne thi lub ali sa zamieniane na qi
T07v=subs(T07,{th1 th2 th3 th4 th5 th6 th7},{q1 q2 q3 q4 q5 q6 q7})
% wskazanie zmiennych złączowych
% zmienne: th1 th2 th3 th4 th5 th6 th7 wskazuj? ‘1’-ki
zmie=[[1,0,0,0];[1,0,0,0];[1,0,0,0];[1,0,0,0];[1,0,0,0];[1,0,0,0];[1,0,0,0]]
% uproszczona postać macierzy przekształcenia jednorodnego
% dla celów interpretacji
T07u=zam(zmie,T07v)
% podstawienie wartości zmiennych złączowych
% i stałych parametrów do macierzy T0e
% należy podstawić dane odpowiednio w radianach lub metrach
T0en=subs(T07,{th1,a1,th2,a2,a3,th4,th5,th6,d6},{pi/6,0.6,pi/4,0.4,0.4,pi/3,pi/5,pi/4,0.1})

4.
Wyznaczone macierze:
T07 =
[ sin(th7)*(sin(th5)*(cos(th4)*(sin(th3)*sin(pi/18 + th1) - cos(th2)*cos(th3)*cos(pi/18 +
th1)) + sin(th4)*(cos(th3)*sin(pi/18 + th1) + cos(th2)*cos(pi/18 + th1)*sin(th3))) +
cos(th5)*cos(pi/18 + th1)*sin(th2)) - cos(th7)*(sin(th6)*(cos(th4)*(cos(th3)*sin(pi/18 +
th1) + cos(th2)*cos(pi/18 + th1)*sin(th3)) - sin(th4)*(sin(th3)*sin(pi/18 + th1) -
cos(th2)*cos(th3)*cos(pi/18 + th1))) + cos(th6)*(cos(th5)*(cos(th4)*(sin(th3)*sin(pi/18 +
th1) - cos(th2)*cos(th3)*cos(pi/18 + th1)) + sin(th4)*(cos(th3)*sin(pi/18 + th1) +
cos(th2)*cos(pi/18 + th1)*sin(th3))) - cos(pi/18 + th1)*sin(th2)*sin(th5))),
sin(th7)*(sin(th6)*(cos(th4)*(cos(th3)*sin(pi/18 + th1) + cos(th2)*cos(pi/18 +
th1)*sin(th3)) - sin(th4)*(sin(th3)*sin(pi/18 + th1) - cos(th2)*cos(th3)*cos(pi/18 + th1)))
+ cos(th6)*(cos(th5)*(cos(th4)*(sin(th3)*sin(pi/18 + th1) - cos(th2)*cos(th3)*cos(pi/18 +
th1)) + sin(th4)*(cos(th3)*sin(pi/18 + th1) + cos(th2)*cos(pi/18 + th1)*sin(th3))) -
cos(pi/18 + th1)*sin(th2)*sin(th5))) + cos(th7)*(sin(th5)*(cos(th4)*(sin(th3)*sin(pi/18 +
th1) - cos(th2)*cos(th3)*cos(pi/18 + th1)) + sin(th4)*(cos(th3)*sin(pi/18 + th1) +
cos(th2)*cos(pi/18 + th1)*sin(th3))) + cos(th5)*cos(pi/18 + th1)*sin(th2)),
cos(th6)*(cos(th4)*(cos(th3)*sin(pi/18 + th1) + cos(th2)*cos(pi/18 + th1)*sin(th3)) -
sin(th4)*(sin(th3)*sin(pi/18 + th1) - cos(th2)*cos(th3)*cos(pi/18 + th1))) -
sin(th6)*(cos(th5)*(cos(th4)*(sin(th3)*sin(pi/18 + th1) - cos(th2)*cos(th3)*cos(pi/18 +
th1)) + sin(th4)*(cos(th3)*sin(pi/18 + th1) + cos(th2)*cos(pi/18 + th1)*sin(th3))) -
cos(pi/18 + th1)*sin(th2)*sin(th5)), d7*(cos(th6)*(cos(th4)*(cos(th3)*sin(pi/18 + th1) +
cos(th2)*cos(pi/18 + th1)*sin(th3)) - sin(th4)*(sin(th3)*sin(pi/18 + th1) -
cos(th2)*cos(th3)*cos(pi/18 + th1))) - sin(th6)*(cos(th5)*(cos(th4)*(sin(th3)*sin(pi/18 +
th1) - cos(th2)*cos(th3)*cos(pi/18 + th1)) + sin(th4)*(cos(th3)*sin(pi/18 + th1) +
cos(th2)*cos(pi/18 + th1)*sin(th3))) - cos(pi/18 + th1)*sin(th2)*sin(th5))) + a1*cos(pi/18
+ th1) + d5*(cos(th4)*(cos(th3)*sin(pi/18 + th1) + cos(th2)*cos(pi/18 + th1)*sin(th3)) -
sin(th4)*(sin(th3)*sin(pi/18 + th1) - cos(th2)*cos(th3)*cos(pi/18 + th1))) + d3*cos(pi/18 +
th1)*sin(th2) - a3*sin(th3)*sin(pi/18 + th1) + a3*cos(th2)*cos(th3)*cos(pi/18 + th1)]
[ cos(th7)*(sin(th6)*(cos(th4)*(cos(th3)*cos(pi/18 + th1) - cos(th2)*sin(th3)*sin(pi/18 +
th1)) - sin(th4)*(cos(pi/18 + th1)*sin(th3) + cos(th2)*cos(th3)*sin(pi/18 + th1))) +
cos(th6)*(cos(th5)*(cos(th4)*(cos(pi/18 + th1)*sin(th3) + cos(th2)*cos(th3)*sin(pi/18 +
th1)) + sin(th4)*(cos(th3)*cos(pi/18 + th1) - cos(th2)*sin(th3)*sin(pi/18 + th1))) +
sin(th2)*sin(th5)*sin(pi/18 + th1))) - sin(th7)*(sin(th5)*(cos(th4)*(cos(pi/18 +
th1)*sin(th3) + cos(th2)*cos(th3)*sin(pi/18 + th1)) + sin(th4)*(cos(th3)*cos(pi/18 + th1) -

cos(th2)*sin(th3)*sin(pi/18 + th1))) - cos(th5)*sin(th2)*sin(pi/18 + th1)), -
sin(th7)*(sin(th6)*(cos(th4)*(cos(th3)*cos(pi/18 + th1) - cos(th2)*sin(th3)*sin(pi/18 +
th1)) - sin(th4)*(cos(pi/18 + th1)*sin(th3) + cos(th2)*cos(th3)*sin(pi/18 + th1))) +
cos(th6)*(cos(th5)*(cos(th4)*(cos(pi/18 + th1)*sin(th3) + cos(th2)*cos(th3)*sin(pi/18 +
th1)) + sin(th4)*(cos(th3)*cos(pi/18 + th1) - cos(th2)*sin(th3)*sin(pi/18 + th1))) +
sin(th2)*sin(th5)*sin(pi/18 + th1))) - cos(th7)*(sin(th5)*(cos(th4)*(cos(pi/18 +
th1)*sin(th3) + cos(th2)*cos(th3)*sin(pi/18 + th1)) + sin(th4)*(cos(th3)*cos(pi/18 + th1) -
cos(th2)*sin(th3)*sin(pi/18 + th1))) - cos(th5)*sin(th2)*sin(pi/18 + th1)),
sin(th6)*(cos(th5)*(cos(th4)*(cos(pi/18 + th1)*sin(th3) + cos(th2)*cos(th3)*sin(pi/18 +
th1)) + sin(th4)*(cos(th3)*cos(pi/18 + th1) - cos(th2)*sin(th3)*sin(pi/18 + th1))) +
sin(th2)*sin(th5)*sin(pi/18 + th1)) - cos(th6)*(cos(th4)*(cos(th3)*cos(pi/18 + th1) -
cos(th2)*sin(th3)*sin(pi/18 + th1)) - sin(th4)*(cos(pi/18 + th1)*sin(th3) +
cos(th2)*cos(th3)*sin(pi/18 + th1))), d7*(sin(th6)*(cos(th5)*(cos(th4)*(cos(pi/18 +
th1)*sin(th3) + cos(th2)*cos(th3)*sin(pi/18 + th1)) + sin(th4)*(cos(th3)*cos(pi/18 + th1) -
cos(th2)*sin(th3)*sin(pi/18 + th1))) + sin(th2)*sin(th5)*sin(pi/18 + th1)) -
cos(th6)*(cos(th4)*(cos(th3)*cos(pi/18 + th1) - cos(th2)*sin(th3)*sin(pi/18 + th1)) -
sin(th4)*(cos(pi/18 + th1)*sin(th3) + cos(th2)*cos(th3)*sin(pi/18 + th1)))) + a1*sin(pi/18
+ th1) - d5*(cos(th4)*(cos(th3)*cos(pi/18 + th1) - cos(th2)*sin(th3)*sin(pi/18 + th1)) -
sin(th4)*(cos(pi/18 + th1)*sin(th3) + cos(th2)*cos(th3)*sin(pi/18 + th1))) + a3*cos(pi/18 +
th1)*sin(th3) + d3*sin(th2)*sin(pi/18 + th1) + a3*cos(th2)*cos(th3)*sin(pi/18 + th1)]
[
sin(th7)*(cos(th2)*cos(th5) - sin(th5)*(sin(th2)*sin(th3)*sin(th4) -
cos(th3)*cos(th4)*sin(th2))) + cos(th7)*(cos(th6)*(cos(th2)*sin(th5) +
cos(th5)*(sin(th2)*sin(th3)*sin(th4) - cos(th3)*cos(th4)*sin(th2))) +
sin(th6)*(cos(th3)*sin(th2)*sin(th4) + cos(th4)*sin(th2)*sin(th3))),
cos(th7)*(cos(th2)*cos(th5) - sin(th5)*(sin(th2)*sin(th3)*sin(th4) -
cos(th3)*cos(th4)*sin(th2))) - sin(th7)*(cos(th6)*(cos(th2)*sin(th5) +
cos(th5)*(sin(th2)*sin(th3)*sin(th4) - cos(th3)*cos(th4)*sin(th2))) +
sin(th6)*(cos(th3)*sin(th2)*sin(th4) + cos(th4)*sin(th2)*sin(th3))),
sin(th6)*(cos(th2)*sin(th5) + cos(th5)*(sin(th2)*sin(th3)*sin(th4) -
cos(th3)*cos(th4)*sin(th2))) - cos(th6)*(cos(th3)*sin(th2)*sin(th4) +
cos(th4)*sin(th2)*sin(th3)),
d1 - d5*(cos(th3)*sin(th2)*sin(th4) + cos(th4)*sin(th2)*sin(th3)) +
d7*(sin(th6)*(cos(th2)*sin(th5) + cos(th5)*(sin(th2)*sin(th3)*sin(th4) -
cos(th3)*cos(th4)*sin(th2))) - cos(th6)*(cos(th3)*sin(th2)*sin(th4) +
cos(th4)*sin(th2)*sin(th3))) + d3*cos(th2) - a3*cos(th3)*sin(th2)]

[
0,
0,
0,
1]
T07v =
[ sin(q7)*(sin(q5)*(cos(q4)*(sin(q3)*sin(pi/18 + q1) - cos(q2)*cos(q3)*cos(pi/18 + q1)) +
sin(q4)*(cos(q3)*sin(pi/18 + q1) + cos(q2)*cos(pi/18 + q1)*sin(q3))) + cos(q5)*cos(pi/18 +
q1)*sin(q2)) - cos(q7)*(sin(q6)*(cos(q4)*(cos(q3)*sin(pi/18 + q1) + cos(q2)*cos(pi/18 +
q1)*sin(q3)) - sin(q4)*(sin(q3)*sin(pi/18 + q1) - cos(q2)*cos(q3)*cos(pi/18 + q1))) +
cos(q6)*(cos(q5)*(cos(q4)*(sin(q3)*sin(pi/18 + q1) - cos(q2)*cos(q3)*cos(pi/18 + q1)) +
sin(q4)*(cos(q3)*sin(pi/18 + q1) + cos(q2)*cos(pi/18 + q1)*sin(q3))) - cos(pi/18 +
q1)*sin(q2)*sin(q5))), sin(q7)*(sin(q6)*(cos(q4)*(cos(q3)*sin(pi/18 + q1) +
cos(q2)*cos(pi/18 + q1)*sin(q3)) - sin(q4)*(sin(q3)*sin(pi/18 + q1) -
cos(q2)*cos(q3)*cos(pi/18 + q1))) + cos(q6)*(cos(q5)*(cos(q4)*(sin(q3)*sin(pi/18 + q1) -
cos(q2)*cos(q3)*cos(pi/18 + q1)) + sin(q4)*(cos(q3)*sin(pi/18 + q1) + cos(q2)*cos(pi/18 +
q1)*sin(q3))) - cos(pi/18 + q1)*sin(q2)*sin(q5))) +
cos(q7)*(sin(q5)*(cos(q4)*(sin(q3)*sin(pi/18 + q1) - cos(q2)*cos(q3)*cos(pi/18 + q1)) +
sin(q4)*(cos(q3)*sin(pi/18 + q1) + cos(q2)*cos(pi/18 + q1)*sin(q3))) + cos(q5)*cos(pi/18 +
q1)*sin(q2)), cos(q6)*(cos(q4)*(cos(q3)*sin(pi/18 + q1) + cos(q2)*cos(pi/18 + q1)*sin(q3))
- sin(q4)*(sin(q3)*sin(pi/18 + q1) - cos(q2)*cos(q3)*cos(pi/18 + q1))) -
sin(q6)*(cos(q5)*(cos(q4)*(sin(q3)*sin(pi/18 + q1) - cos(q2)*cos(q3)*cos(pi/18 + q1)) +
sin(q4)*(cos(q3)*sin(pi/18 + q1) + cos(q2)*cos(pi/18 + q1)*sin(q3))) - cos(pi/18 +
q1)*sin(q2)*sin(q5)), d5*(cos(q4)*(cos(q3)*sin(pi/18 + q1) + cos(q2)*cos(pi/18 +
q1)*sin(q3)) - sin(q4)*(sin(q3)*sin(pi/18 + q1) - cos(q2)*cos(q3)*cos(pi/18 + q1))) +
a1*cos(pi/18 + q1) + d7*(cos(q6)*(cos(q4)*(cos(q3)*sin(pi/18 + q1) + cos(q2)*cos(pi/18 +
q1)*sin(q3)) - sin(q4)*(sin(q3)*sin(pi/18 + q1) - cos(q2)*cos(q3)*cos(pi/18 + q1))) -
sin(q6)*(cos(q5)*(cos(q4)*(sin(q3)*sin(pi/18 + q1) - cos(q2)*cos(q3)*cos(pi/18 + q1)) +
sin(q4)*(cos(q3)*sin(pi/18 + q1) + cos(q2)*cos(pi/18 + q1)*sin(q3))) - cos(pi/18 +
q1)*sin(q2)*sin(q5))) + d3*cos(pi/18 + q1)*sin(q2) - a3*sin(q3)*sin(pi/18 + q1) +
a3*cos(q2)*cos(q3)*cos(pi/18 + q1)]

[ cos(q7)*(sin(q6)*(cos(q4)*(cos(q3)*cos(pi/18 + q1) - cos(q2)*sin(q3)*sin(pi/18 + q1)) -
sin(q4)*(cos(pi/18 + q1)*sin(q3) + cos(q2)*cos(q3)*sin(pi/18 + q1))) +
cos(q6)*(cos(q5)*(cos(q4)*(cos(pi/18 + q1)*sin(q3) + cos(q2)*cos(q3)*sin(pi/18 + q1)) +
sin(q4)*(cos(q3)*cos(pi/18 + q1) - cos(q2)*sin(q3)*sin(pi/18 + q1))) +
sin(q2)*sin(q5)*sin(pi/18 + q1))) - sin(q7)*(sin(q5)*(cos(q4)*(cos(pi/18 + q1)*sin(q3) +
cos(q2)*cos(q3)*sin(pi/18 + q1)) + sin(q4)*(cos(q3)*cos(pi/18 + q1) -
cos(q2)*sin(q3)*sin(pi/18 + q1))) - cos(q5)*sin(q2)*sin(pi/18 + q1)), -
sin(q7)*(sin(q6)*(cos(q4)*(cos(q3)*cos(pi/18 + q1) - cos(q2)*sin(q3)*sin(pi/18 + q1)) -
sin(q4)*(cos(pi/18 + q1)*sin(q3) + cos(q2)*cos(q3)*sin(pi/18 + q1))) +
cos(q6)*(cos(q5)*(cos(q4)*(cos(pi/18 + q1)*sin(q3) + cos(q2)*cos(q3)*sin(pi/18 + q1)) +
sin(q4)*(cos(q3)*cos(pi/18 + q1) - cos(q2)*sin(q3)*sin(pi/18 + q1))) +
sin(q2)*sin(q5)*sin(pi/18 + q1))) - cos(q7)*(sin(q5)*(cos(q4)*(cos(pi/18 + q1)*sin(q3) +
cos(q2)*cos(q3)*sin(pi/18 + q1)) + sin(q4)*(cos(q3)*cos(pi/18 + q1) -
cos(q2)*sin(q3)*sin(pi/18 + q1))) - cos(q5)*sin(q2)*sin(pi/18 + q1)),
sin(q6)*(cos(q5)*(cos(q4)*(cos(pi/18 + q1)*sin(q3) + cos(q2)*cos(q3)*sin(pi/18 + q1)) +
sin(q4)*(cos(q3)*cos(pi/18 + q1) - cos(q2)*sin(q3)*sin(pi/18 + q1))) +
sin(q2)*sin(q5)*sin(pi/18 + q1)) - cos(q6)*(cos(q4)*(cos(q3)*cos(pi/18 + q1) -
cos(q2)*sin(q3)*sin(pi/18 + q1)) - sin(q4)*(cos(pi/18 + q1)*sin(q3) +
cos(q2)*cos(q3)*sin(pi/18 + q1))), a1*sin(pi/18 + q1) - d5*(cos(q4)*(cos(q3)*cos(pi/18 +
q1) - cos(q2)*sin(q3)*sin(pi/18 + q1)) - sin(q4)*(cos(pi/18 + q1)*sin(q3) +
cos(q2)*cos(q3)*sin(pi/18 + q1))) - d7*(cos(q6)*(cos(q4)*(cos(q3)*cos(pi/18 + q1) -
cos(q2)*sin(q3)*sin(pi/18 + q1)) - sin(q4)*(cos(pi/18 + q1)*sin(q3) +
cos(q2)*cos(q3)*sin(pi/18 + q1))) - sin(q6)*(cos(q5)*(cos(q4)*(cos(pi/18 + q1)*sin(q3) +
cos(q2)*cos(q3)*sin(pi/18 + q1)) + sin(q4)*(cos(q3)*cos(pi/18 + q1) -
cos(q2)*sin(q3)*sin(pi/18 + q1))) + sin(q2)*sin(q5)*sin(pi/18 + q1))) + a3*cos(pi/18 +
q1)*sin(q3) + d3*sin(q2)*sin(pi/18 + q1) + a3*cos(q2)*cos(q3)*sin(pi/18 + q1)]
[
sin(q7)*(cos(q2)*cos(q5) - sin(q5)*(sin(q2)*sin(q3)*sin(q4) - cos(q3)*cos(q4)*sin(q2))) +
cos(q7)*(cos(q6)*(cos(q2)*sin(q5) + cos(q5)*(sin(q2)*sin(q3)*sin(q4) -
cos(q3)*cos(q4)*sin(q2))) + sin(q6)*(cos(q3)*sin(q2)*sin(q4) + cos(q4)*sin(q2)*sin(q3))),
cos(q7)*(cos(q2)*cos(q5) - sin(q5)*(sin(q2)*sin(q3)*sin(q4) - cos(q3)*cos(q4)*sin(q2))) -
sin(q7)*(cos(q6)*(cos(q2)*sin(q5) + cos(q5)*(sin(q2)*sin(q3)*sin(q4) -
cos(q3)*cos(q4)*sin(q2))) + sin(q6)*(cos(q3)*sin(q2)*sin(q4) + cos(q4)*sin(q2)*sin(q3))),
sin(q6)*(cos(q2)*sin(q5) + cos(q5)*(sin(q2)*sin(q3)*sin(q4) - cos(q3)*cos(q4)*sin(q2))) -
cos(q6)*(cos(q3)*sin(q2)*sin(q4) + cos(q4)*sin(q2)*sin(q3)),
d1 - d5*(cos(q3)*sin(q2)*sin(q4) + cos(q4)*sin(q2)*sin(q3)) + d3*cos(q2) +
d7*(sin(q6)*(cos(q2)*sin(q5) + cos(q5)*(sin(q2)*sin(q3)*sin(q4) -

cos(q3)*cos(q4)*sin(q2))) - cos(q6)*(cos(q3)*sin(q2)*sin(q4) + cos(q4)*sin(q2)*sin(q3))) -
a3*cos(q3)*sin(q2)]
[
0,
0,
0,
1]
T07u =
[ S7*(S5*(C4*(S3*sin(pi/18 + q1) - C2*C3*cos(pi/18 + q1)) + S4*(C3*sin(pi/18 + q1) +
C2*S3*cos(pi/18 + q1))) + C5*S2*cos(pi/18 + q1)) - C7*(S6*(C4*(C3*sin(pi/18 + q1) +
C2*S3*cos(pi/18 + q1)) - S4*(S3*sin(pi/18 + q1) - C2*C3*cos(pi/18 + q1))) +
C6*(C5*(C4*(S3*sin(pi/18 + q1) - C2*C3*cos(pi/18 + q1)) + S4*(C3*sin(pi/18 + q1) +
C2*S3*cos(pi/18 + q1))) - S2*S5*cos(pi/18 + q1))), C7*(S5*(C4*(S3*sin(pi/18 + q1) -
C2*C3*cos(pi/18 + q1)) + S4*(C3*sin(pi/18 + q1) + C2*S3*cos(pi/18 + q1))) +
C5*S2*cos(pi/18 + q1)) + S7*(S6*(C4*(C3*sin(pi/18 + q1) + C2*S3*cos(pi/18 + q1)) -
S4*(S3*sin(pi/18 + q1) - C2*C3*cos(pi/18 + q1))) + C6*(C5*(C4*(S3*sin(pi/18 + q1) -
C2*C3*cos(pi/18 + q1)) + S4*(C3*sin(pi/18 + q1) + C2*S3*cos(pi/18 + q1))) -
S2*S5*cos(pi/18 + q1))), C6*(C4*(C3*sin(pi/18 + q1) + C2*S3*cos(pi/18 + q1)) -
S4*(S3*sin(pi/18 + q1) - C2*C3*cos(pi/18 + q1))) - S6*(C5*(C4*(S3*sin(pi/18 + q1) -
C2*C3*cos(pi/18 + q1)) + S4*(C3*sin(pi/18 + q1) + C2*S3*cos(pi/18 + q1))) -
S2*S5*cos(pi/18 + q1)), d5*(C4*(C3*sin(pi/18 + q1) + C2*S3*cos(pi/18 + q1)) -
S4*(S3*sin(pi/18 + q1) - C2*C3*cos(pi/18 + q1))) - d7*(S6*(C5*(C4*(S3*sin(pi/18 + q1) -
C2*C3*cos(pi/18 + q1)) + S4*(C3*sin(pi/18 + q1) + C2*S3*cos(pi/18 + q1))) -
S2*S5*cos(pi/18 + q1)) - C6*(C4*(C3*sin(pi/18 + q1) + C2*S3*cos(pi/18 + q1)) -
S4*(S3*sin(pi/18 + q1) - C2*C3*cos(pi/18 + q1)))) + a1*cos(pi/18 + q1) - S3*a3*sin(pi/18 +
q1) + S2*d3*cos(pi/18 + q1) + C2*C3*a3*cos(pi/18 + q1)]
[ C7*(S6*(C4*(C3*cos(pi/18 + q1) - C2*S3*sin(pi/18 + q1)) - S4*(S3*cos(pi/18 + q1) +
C2*C3*sin(pi/18 + q1))) + C6*(C5*(C4*(S3*cos(pi/18 + q1) + C2*C3*sin(pi/18 + q1)) +
S4*(C3*cos(pi/18 + q1) - C2*S3*sin(pi/18 + q1))) + S2*S5*sin(pi/18 + q1))) -
S7*(S5*(C4*(S3*cos(pi/18 + q1) + C2*C3*sin(pi/18 + q1)) + S4*(C3*cos(pi/18 + q1) -
C2*S3*sin(pi/18 + q1))) - C5*S2*sin(pi/18 + q1)), - S7*(S6*(C4*(C3*cos(pi/18 + q1) -
C2*S3*sin(pi/18 + q1)) - S4*(S3*cos(pi/18 + q1) + C2*C3*sin(pi/18 + q1))) +

C6*(C5*(C4*(S3*cos(pi/18 + q1) + C2*C3*sin(pi/18 + q1)) + S4*(C3*cos(pi/18 + q1) -
C2*S3*sin(pi/18 + q1))) + S2*S5*sin(pi/18 + q1))) - C7*(S5*(C4*(S3*cos(pi/18 + q1) +
C2*C3*sin(pi/18 + q1)) + S4*(C3*cos(pi/18 + q1) - C2*S3*sin(pi/18 + q1))) -
C5*S2*sin(pi/18 + q1)), S6*(C5*(C4*(S3*cos(pi/18 + q1) + C2*C3*sin(pi/18 + q1)) +
S4*(C3*cos(pi/18 + q1) - C2*S3*sin(pi/18 + q1))) + S2*S5*sin(pi/18 + q1)) -
C6*(C4*(C3*cos(pi/18 + q1) - C2*S3*sin(pi/18 + q1)) - S4*(S3*cos(pi/18 + q1) +
C2*C3*sin(pi/18 + q1))), d7*(S6*(C5*(C4*(S3*cos(pi/18 + q1) + C2*C3*sin(pi/18 + q1)) +
S4*(C3*cos(pi/18 + q1) - C2*S3*sin(pi/18 + q1))) + S2*S5*sin(pi/18 + q1)) -
C6*(C4*(C3*cos(pi/18 + q1) - C2*S3*sin(pi/18 + q1)) - S4*(S3*cos(pi/18 + q1) +
C2*C3*sin(pi/18 + q1)))) - d5*(C4*(C3*cos(pi/18 + q1) - C2*S3*sin(pi/18 + q1)) -
S4*(S3*cos(pi/18 + q1) + C2*C3*sin(pi/18 + q1))) + a1*sin(pi/18 + q1) + S2*d3*sin(pi/18 +
q1) + S3*a3*cos(pi/18 + q1) + C2*C3*a3*sin(pi/18 + q1)]
[
S7*(S5*(C3*C4*S2 - S2*S3*S4) + C2*C5) - C7*(C6*(C5*(C3*C4*S2 - S2*S3*S4) - C2*S5) -
S6*(C3*S2*S4 + C4*S2*S3)),
S7*(C6*(C5*(C3*C4*S2 - S2*S3*S4) - C2*S5) - S6*(C3*S2*S4 + C4*S2*S3)) +
C7*(S5*(C3*C4*S2 - S2*S3*S4) + C2*C5),
- C6*(C3*S2*S4 + C4*S2*S3) - S6*(C5*(C3*C4*S2 - S2*S3*S4) - C2*S5),
d1 + C2*d3 - d7*(C6*(C3*S2*S4 + C4*S2*S3) + S6*(C5*(C3*C4*S2 - S2*S3*S4) - C2*S5)) -
d5*(C3*S2*S4 + C4*S2*S3) - C3*S2*a3]
[
0,
0,
0,
1]
T0en =
0.9848
0
0.1736
0.6661
0.1736
0
-0.9848
-0.8980
0 1.0000
0
0.6000
0 0
0
1.0000

Wyszukiwarka
Podobne podstrony:
Grudziński Krawiec lab2# 10 2012
Grudziński Krawiec lab2# 10 2012
PISMO SWIETE O RODZINI w 28 10 Nieznany
Lab2 Grudzinski Krawiec id 2593 Nieznany
Lab4 Grudzinski Krawiec 14XI201 Nieznany
Lab2a Grudzinski Krawiec id 259 Nieznany
28 10 2013 Geografia id 31910 Nieznany (2)
3 28 10 2011 la grammaire desc Nieznany (2)
28 10 Podstawy Prawa id 31911 Nieznany (2)
egzamin dodatkowy 28 10 2005 id Nieznany
Lab2 Grudziński Krawiec
28 10 id 31837 Nieznany (2)
analiza wyklad z 28,10 MUXGTDRS Nieznany
Lab4 Grudzinski Krawiec 14XI201 Nieznany
Kosci, kregoslup 28[1][1][1] 10 06 dla studentow
28.10.2007, Kosmetologia, histologia
Lab2a Grudziński Krawiec
28 10 2011
więcej podobnych podstron