Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
1
Katedra Robotyki i Mechatroniki
Akademia Górniczo-Hutnicza w Krakowie
Wojciech Lisowski
7
Technika zastosowania napędów płynowych
w manipulatorach robotów
Roboty przemysłowe

Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
2
Problemy:
sprawność, moc i siła napędów płynowych
i elektrycznych manipulatorów
znaczenie podatności powietrza w napędach
pneumatycznych manipulatorów
napędy pneumohydrauliczne
metody uzyskiwania wielu położeń elementu
wykonawczego napędu pneumatycznego
manipulatorów
akumulator hydrauliczny w napędach
manipulatorów
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
3
Technika rozmieszczenia Przetworników Energii Pierwotnej
A) PRZETWORNIKI UMIESZCZONE
W ZŁĄCZACH
jest to rozwiązanie prostsze technicznie
w złączu przekładnia redukcyjna
- duże wymiary - ograniczenie swobody ruchu
- dodatkowa masa przekładni - rośnie ciężar i bezwładność
B
A
najczęściej stosowane rozwiązanie dla napędu elektrycznego
- standardowy przetwornik ma dużą prędkość przy małym
momencie/sile
- duży koszt przetwornika momentowego
- duża masa i średnica
- zwykle droższy czujnik położenia
- większa "czułość" układu wykonawczego - trudniej sterować ruchem
- duża wrażliwość na przegrzanie (nap. elektr.)
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
4
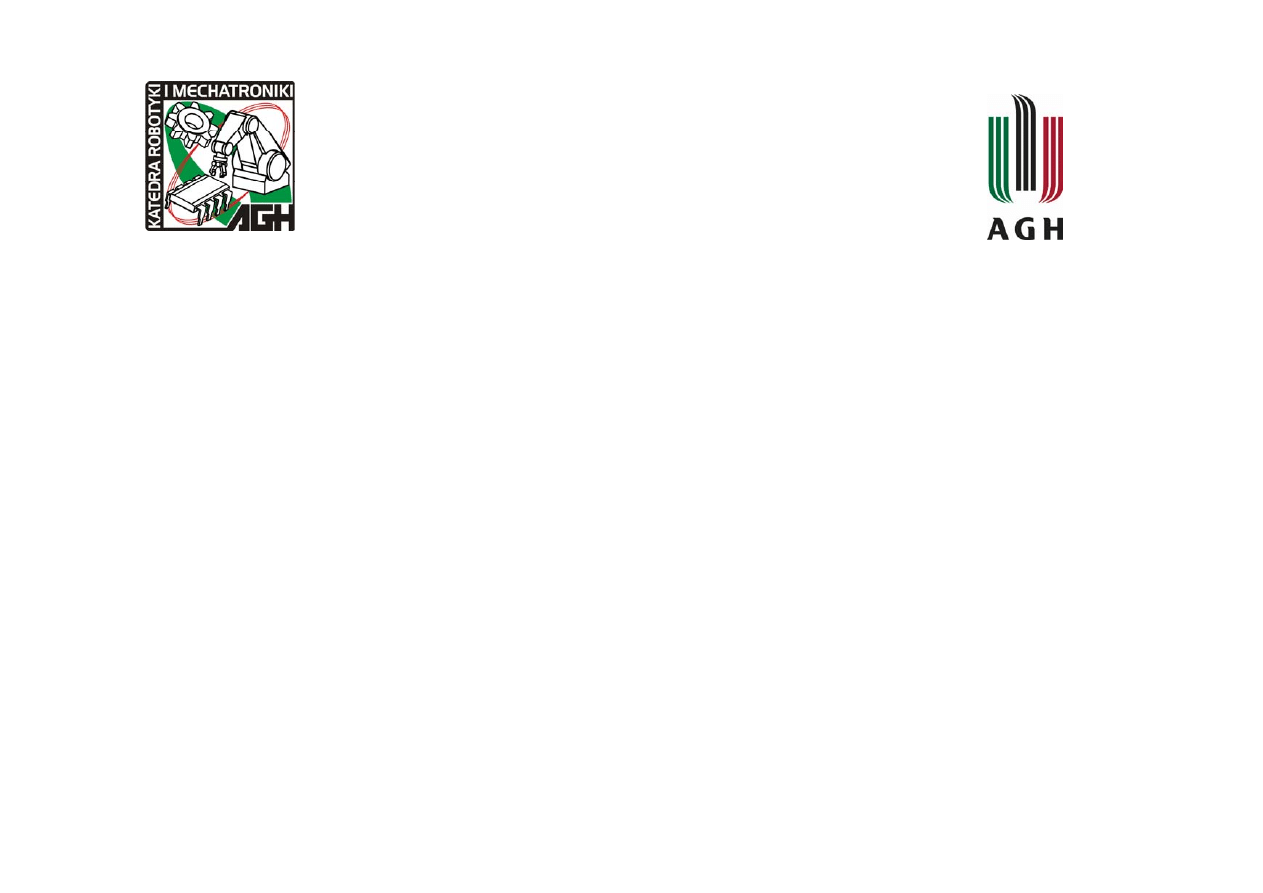
B). PRZETWORNIKI UMIESZCZONE W PODSTAWIE, RUCH
PRZEKAZYWANY DROGĄ TRANSMISJI MECHANICZNEJ
WZDŁUŻ ŁAŃCUCHA KINEMATYCZNEGO MANIPULATORA
ograniczenie swobody ruchu – Układy Transmisji Ruchu zajmują
dużą objętość
techniczna trudność przekazywania ruchu przez wiele złącz
w systemie o zmiennej konfiguracji łańcucha kinematycznego
manipulatora w czasie ruchu
tarcie w łańcuchu kinematycznym napędu powoduje obniżenie
dokładności (tarcie spoczynkowe, histereza, obniżenie sprawności)
luzy w łańcuchu kinematycznym napędu powodują obniżenie
dokładności
podatność w łańcuchu kinematycznym napędu – powoduje
nierównomierność ruchu i powstawanie drgań: wydłużenie czasu
regulacji, niebezpieczeństwo niestabilności układu
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
5
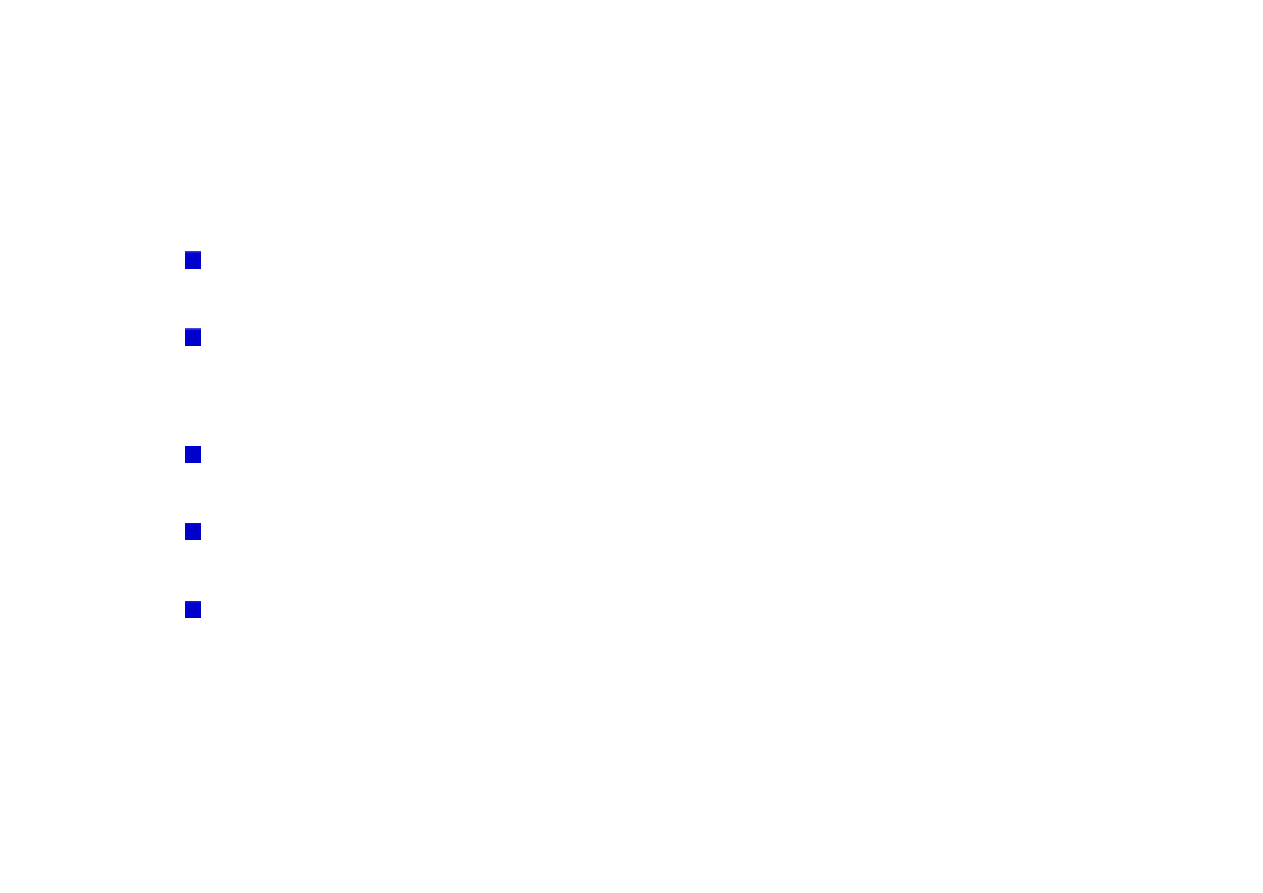
RAMIĘ
Ruchy
Regionalne
A lub B
KIŚĆ
Ruchy Lokalne
Zwykle A
Najłatwiej do złącza dostarczyć energię elektryczną, trudniej
hydrostatyczną, a najtrudniej mechaniczną
Manipulator robota przemysłowego
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
6
ŹRÓDŁA ENERGII PIERWOTNEJ
RODZAJE ENERGII PIERWOTNEJ manipulatorów robotów
przemysłowych:
ENERGIA POTENCJALNA PŁYNU
ENERGIA ELEKTRYCZNA
Sprawność
Moc z jednostki
masy napędu
Maksymalna siła
z jednostki
powierzchni
czynnej
Rodzaj
napędu
[%]
[W/kg]
[N/cm
2
]
Pneumatyczny
Hydrauliczny
Elektryczny
15-25
30-35
50-55
300
650
25-150
100
2000
0.3-1.5
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
7
(Honczarenko)
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
8
Porównanie podatności napędów płynowych:
2 siłowniki o jednakowych: sile parcia i skoku
Ciśnienie zasilania:
P
P
=7 bar
P
H
=100 bar
Stosunek powierzchni tłoków:
14
≈
H
P
S
S
Stosunek podatności:
20000
≈
H
P
C
C
Stosunek częstości drgań własnych:
140
≈
P
H
ω
ω
Napędy pneumatyczne:
większe amplitudy oscylacji w czasie pozycjonowania
dłuższy czas pozycjonowania
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
9
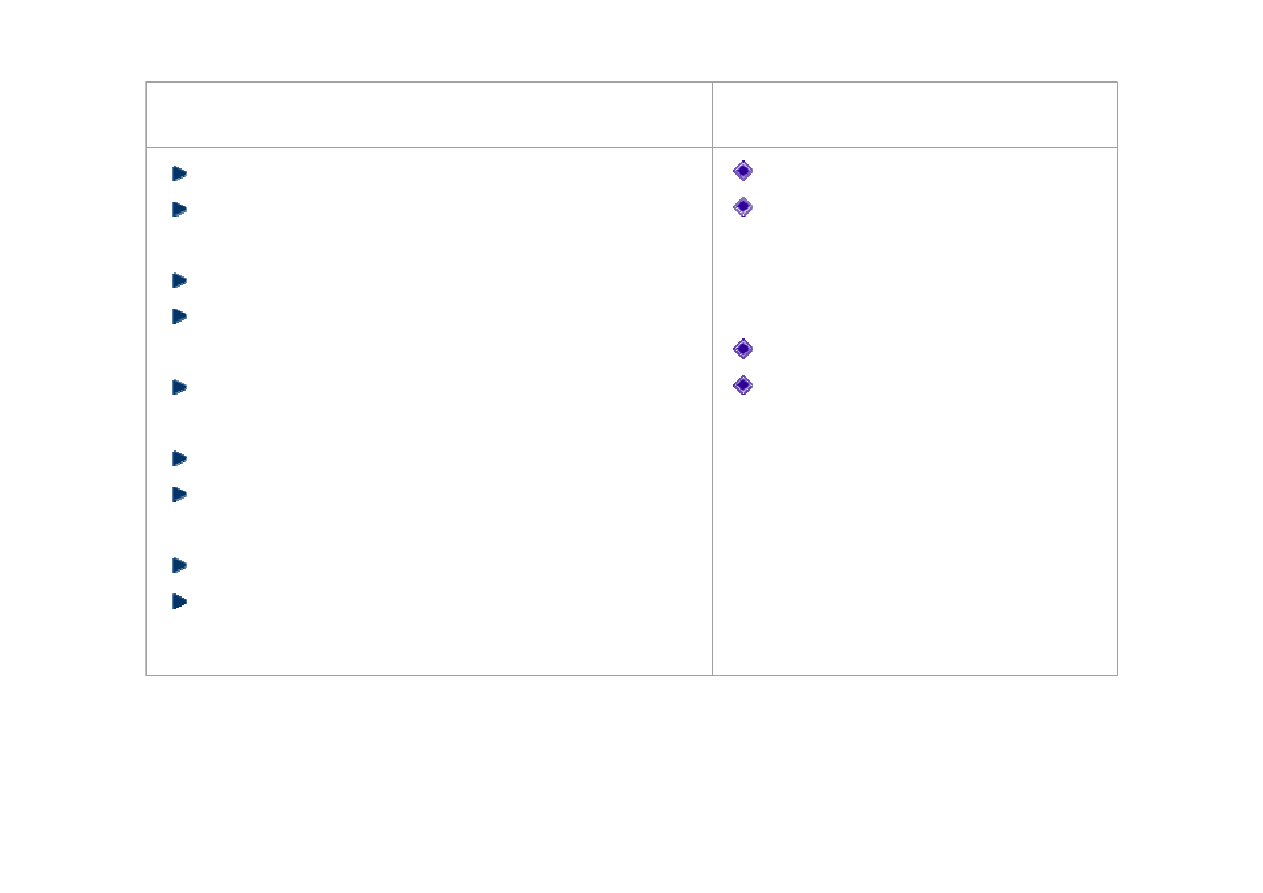
Zalety
Wady
Prostota konstrukcji
Niski koszt (pozycjonowanie
zderzakowe)
Duża dostępność czynnika roboczego
Brak potrzeby zamykania sieci czynnika
roboczego
Mała masa/bezwładność czynnika
roboczego
Duża niezawodność i trwałość napędów
Mała wrażliwość napędu na: wilgotność,
zapylenie, pole magnetyczne.
Iskrobezpieczeństwo.
Podatność
⇒duża przeciążalność napędu,
powolne narastanie sił (chwytaki)
Niska sprawność
Wielkość sił uzyskiwanych
w napędach pneuma-
tycznych jest ograniczona
ciśnieniem zasilania
Hałas
Podatność
⇒ trudność
uzyskiwania ruchów
jednostajnych, wrażliwość
przebiegów parametrów
ruchu na zmiany obciążenia
roboczego
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
10
Charakterystyka zastosowania napędów pneumatycznych:
Napędy pneumatyczne pozycjonowane zderzakowo stosowane w
manipulatorach osiągają wysokie powtarzalności pozycjonowania,
zapewniają duże zakresy ruchu elementów pozycjonowanych.
Manipulatory z napędami pneumatycznymi są wykorzystywane
głównie w operacjach manipulacyjnych.
Wymiana programu w przypadku napędów pozycjonowanych
zderzakowo wymaga przestawienia zderzaków i/lub zmiany połączeń
sterownika z zaworami rozdzielającymi, co w ogólnym przypadku nie
może być wykonane bez ingerencji obsługi.
Z tego powodu manipulatory takie nie są robotami (wymaganie
automatycznej zmiany programu) i nie mogą być efektywnie
wykorzystywane w elastycznych systemach produkcyjnych.
Trudności budowy serwonapędów pneumatycznych ograniczają ich
zastosowanie w manipulatorach pozycjonowanych swobodnie.
Rozwój technologii powoduje zarówno polepszanie się charakterystyk
serwonapędów pneumatycznych jak i spadek ich cen.
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
11
Rodzaje elementów wykonawczych napędów pneumatycznych:
Siłownik tłokowy jest najczęściej stosowanym elementem wykonawczym
tłok najczęściej pozycjonowany
zderzakowo
brak możliwości sterowania
prędkością ruchu tłoka, zmiana
prędkości przez dławienie na
wylocie cylindra
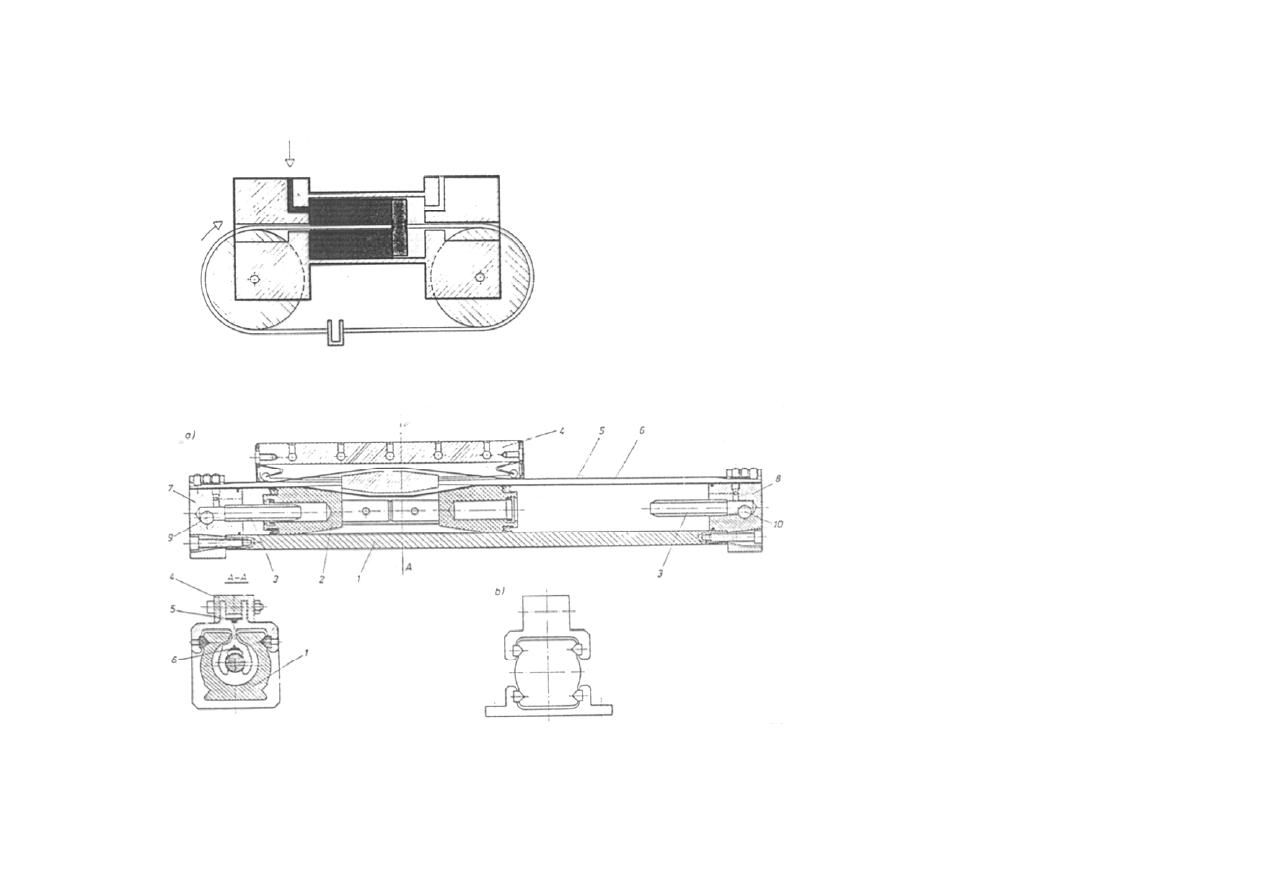
- siłownik z przewijaną membraną
- siłownik łopatkowy
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
12
w pozycjonujących napędach pneumatycznych istotne jest
zastosowanie efektywnego układu amortyzacji umożliwiającego
pochłonięcie i rozproszenie energii kinetycznej obciążenia w celu
uniknięcia uderzenia tłoka o ogranicznik skoku lub zderzak;
potencjalne skutki uderzenia:
- duże obciążenia dynamiczne
- niebezpieczeństwo zgubienia przenoszonego przedmiotu.
Amortyzacja w skrajnych
położeniach tłoka:
komory cylindra o zmniejszonych
średnicach + dodatkowe przewody
wylotowe z dławieniem
(Festo)
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
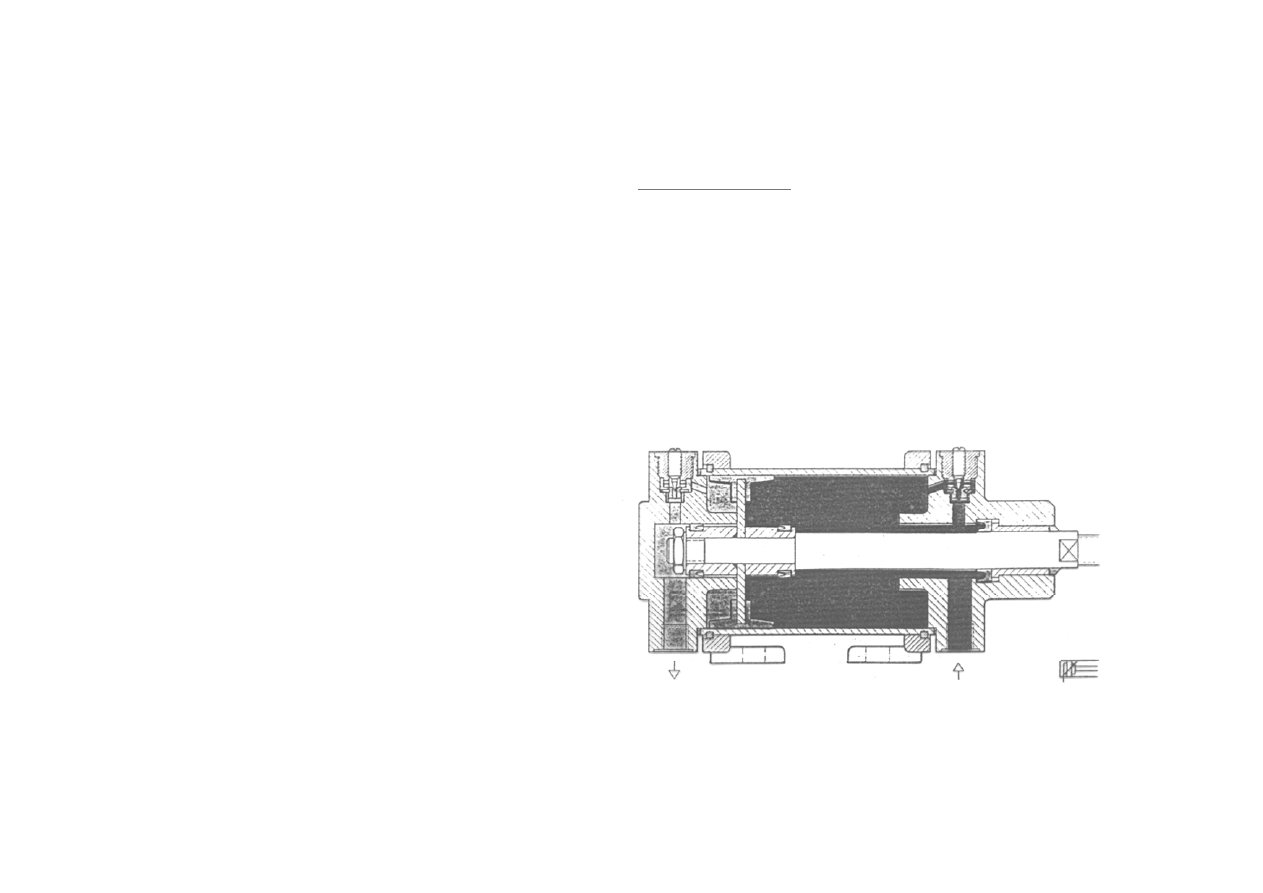
13
Amortyzacja przy dojściu do zderzaka:
- mechaniczna
- pneumatyczna
- hydropneumatyczna
- hydrauliczna
Wymagany czas
powrotu do stanu
gotowości: 0.4-1.0 s
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
14
- siłownik beztłoczyskowy z cięgnem
- siłownik beztłoczyskowy (magnetyczny)
Średnica cylindra 40 mm
Skok do 4 m
Siła użyteczna 645 N
Siła zrywająca 1050 N
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
15
Napędy pneumo-hydrauliczne
Zalety:
zmniejszenie średnicy cylindra (objętości)
zwiększenie równomierności ruchu
ułatwienie pozycjonowania
zwiększenie sił parcia
brak konieczności stosowania zasilacza hydraulicznego
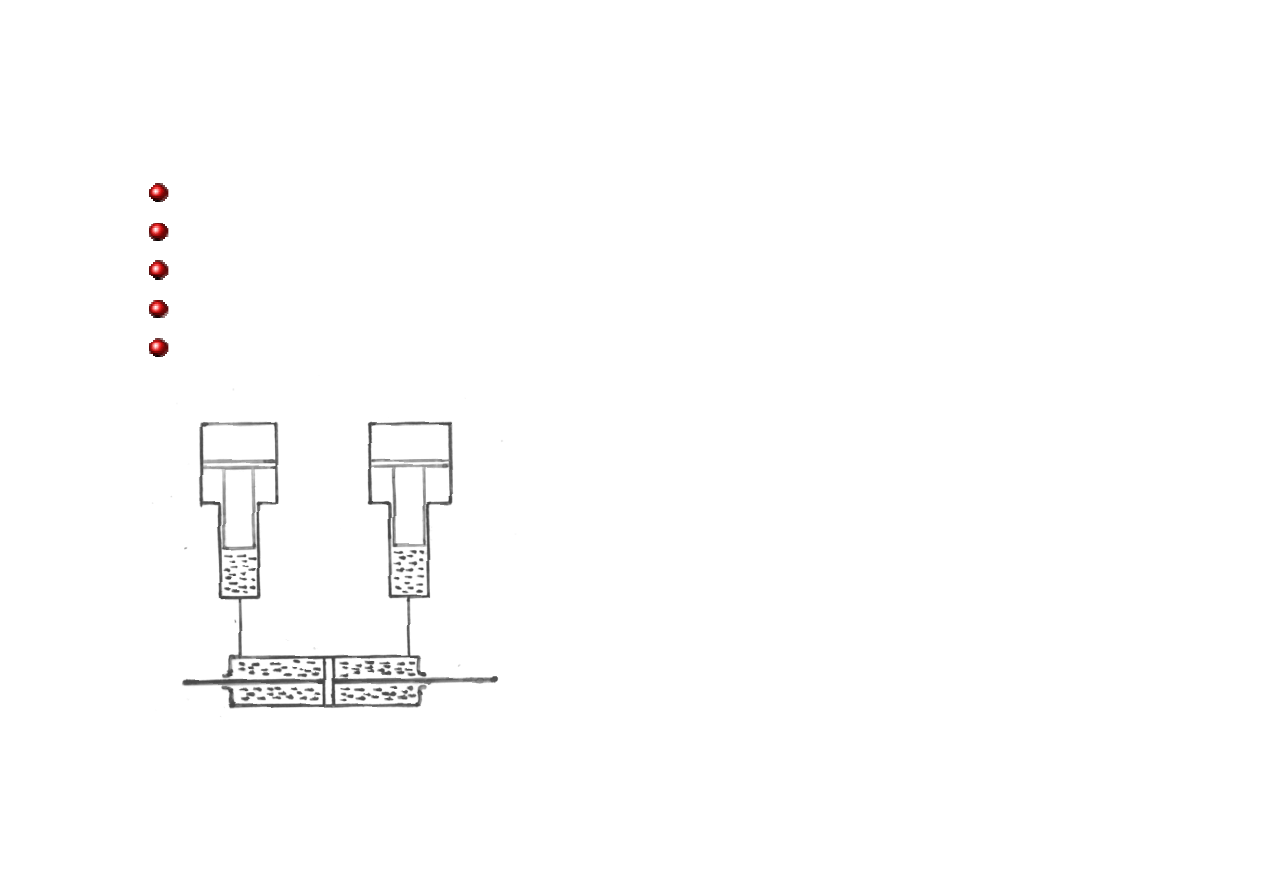
Idea zastosowania układu ze
wzmacniaczem pneumo-
hydraulicznym (pojedynczego lub
dwustronnego działania).

Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
16
Problemy pozycjonowania z zastosowaniem napędów pneumatycznych
Pozycjonowanie zderzakowe:
Zawory rozdzielające:
3/2 (grzybkowe)
nie ma tarcia
nie wymagają smarowania
otwarcie zależy od ciśnienia
Zawory suwakowe:
• problem tarcia między suwakiem
a cylindrem
• pozycja suwaka odpowiada
równowadze sił sterujących
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
17
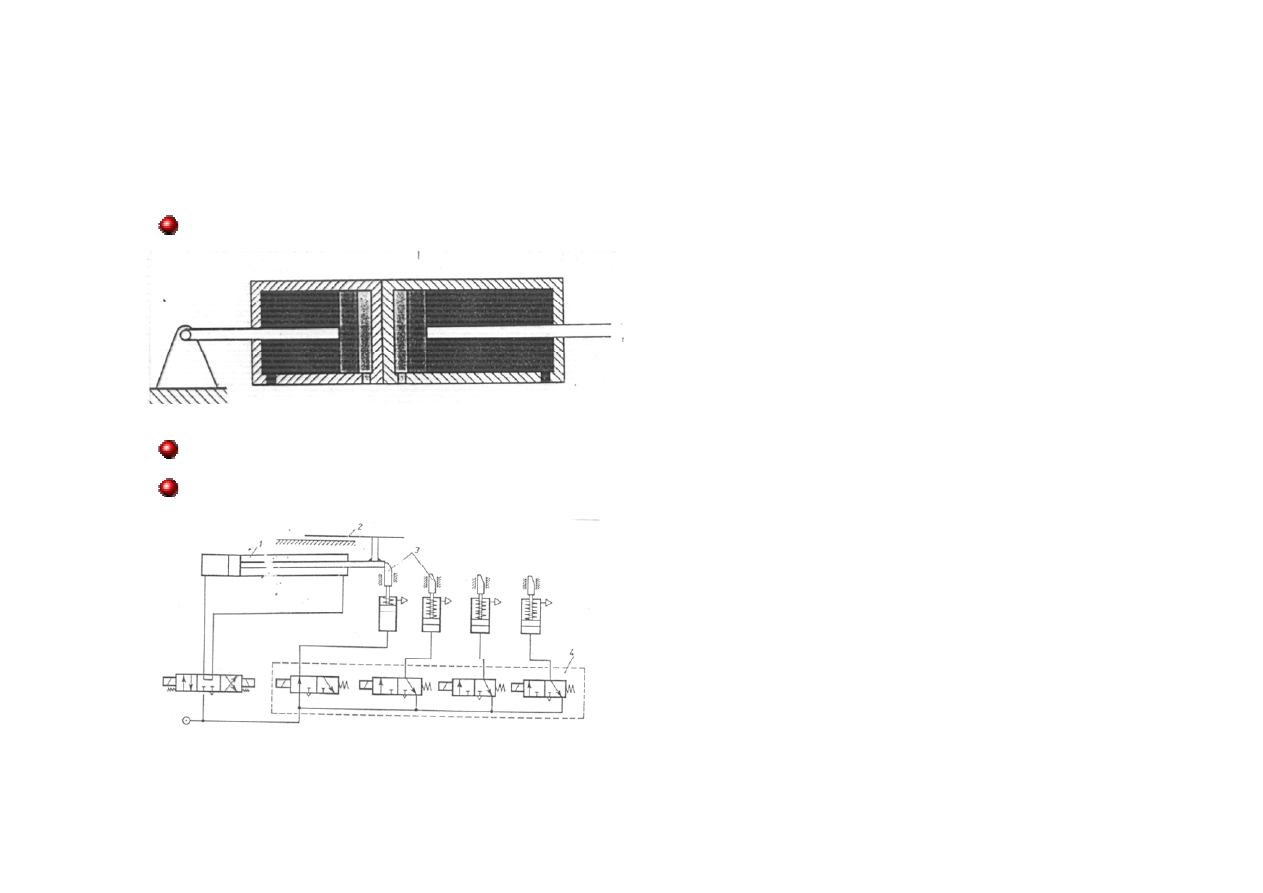
Metody uzyskiwania wielu położeń elementu wykonawczego
Napędów Pneumatycznych pozycjonowanego zderzakowo poprzez
zastosowanie:
siłowników wielopołożeniowych
bezstykowych czujników położenia
zderzaków wysuwanych przez dodatkowe siłowniki
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
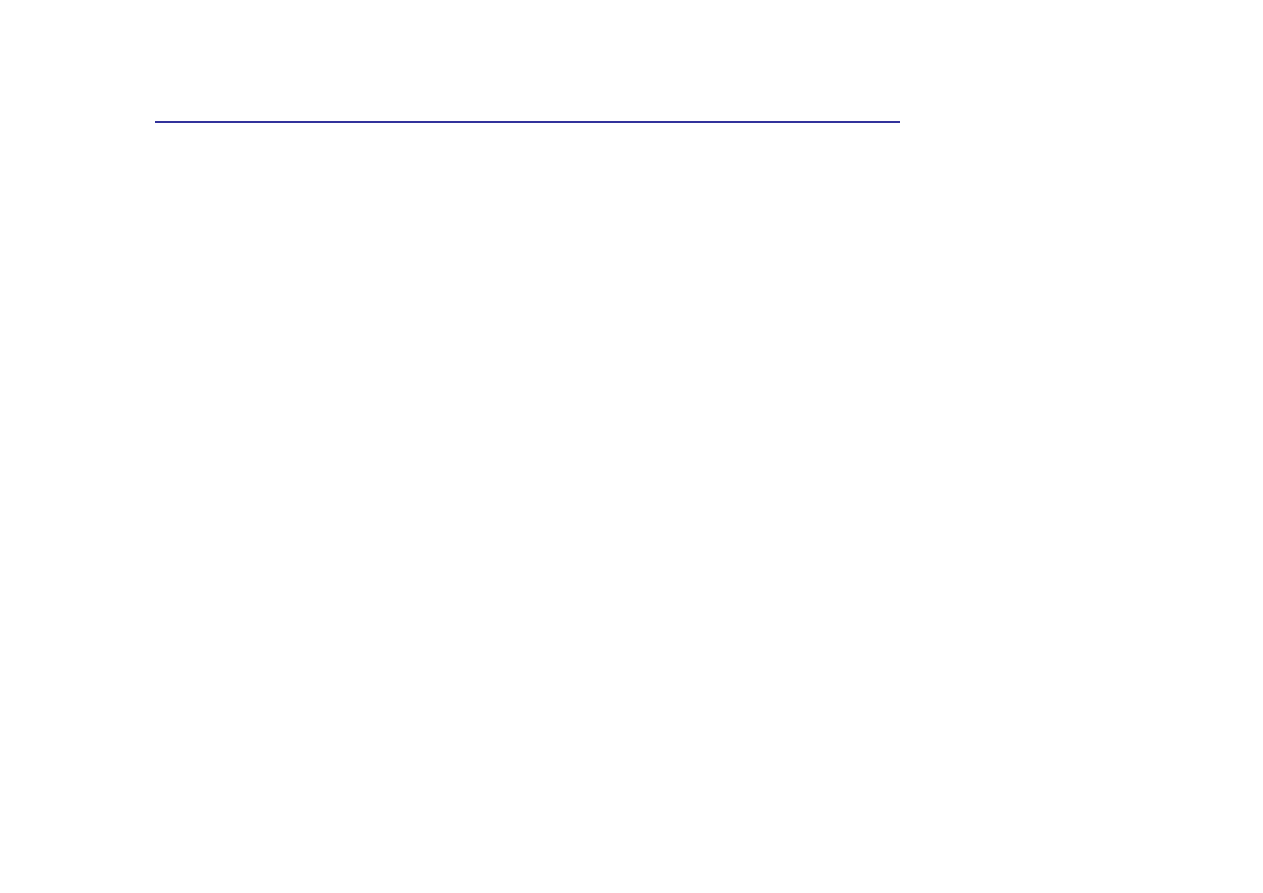
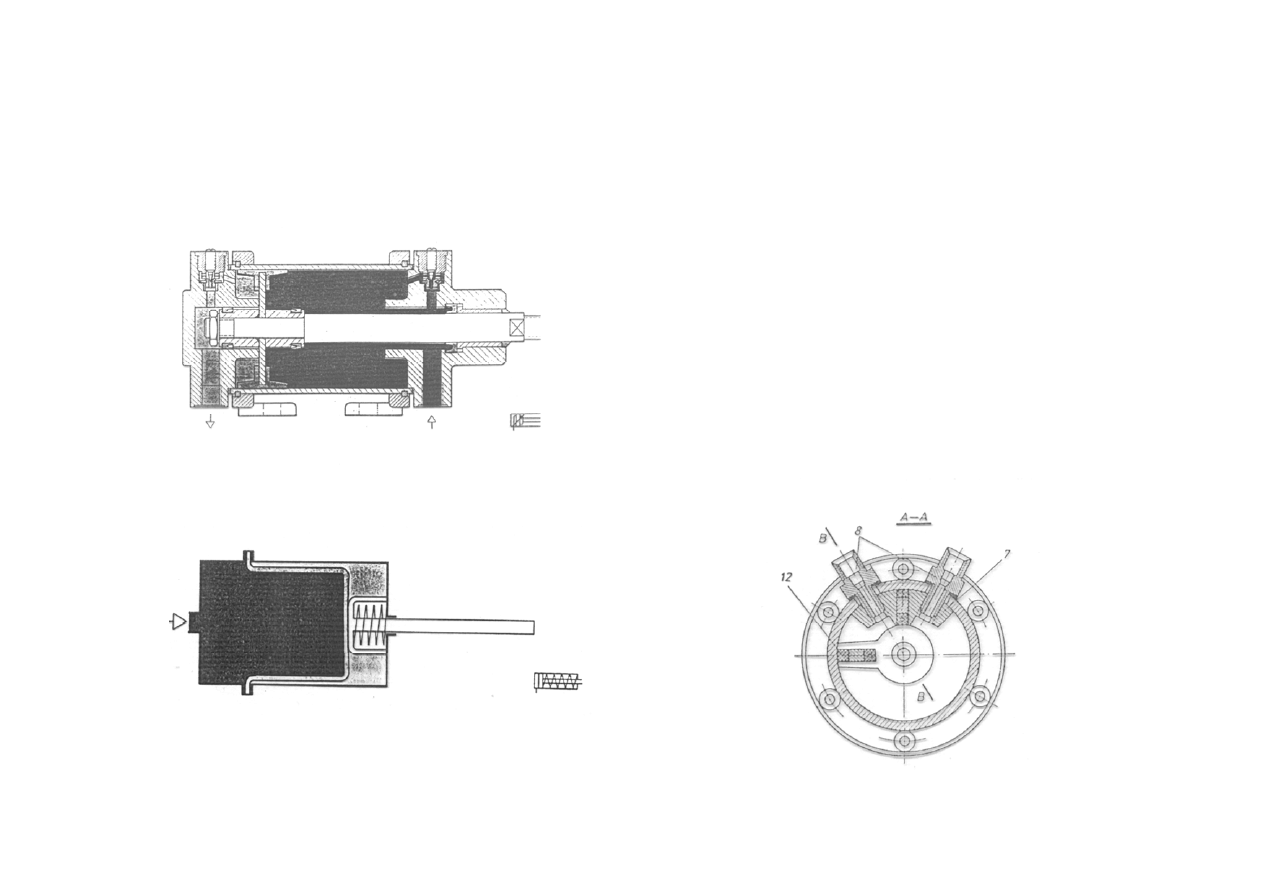
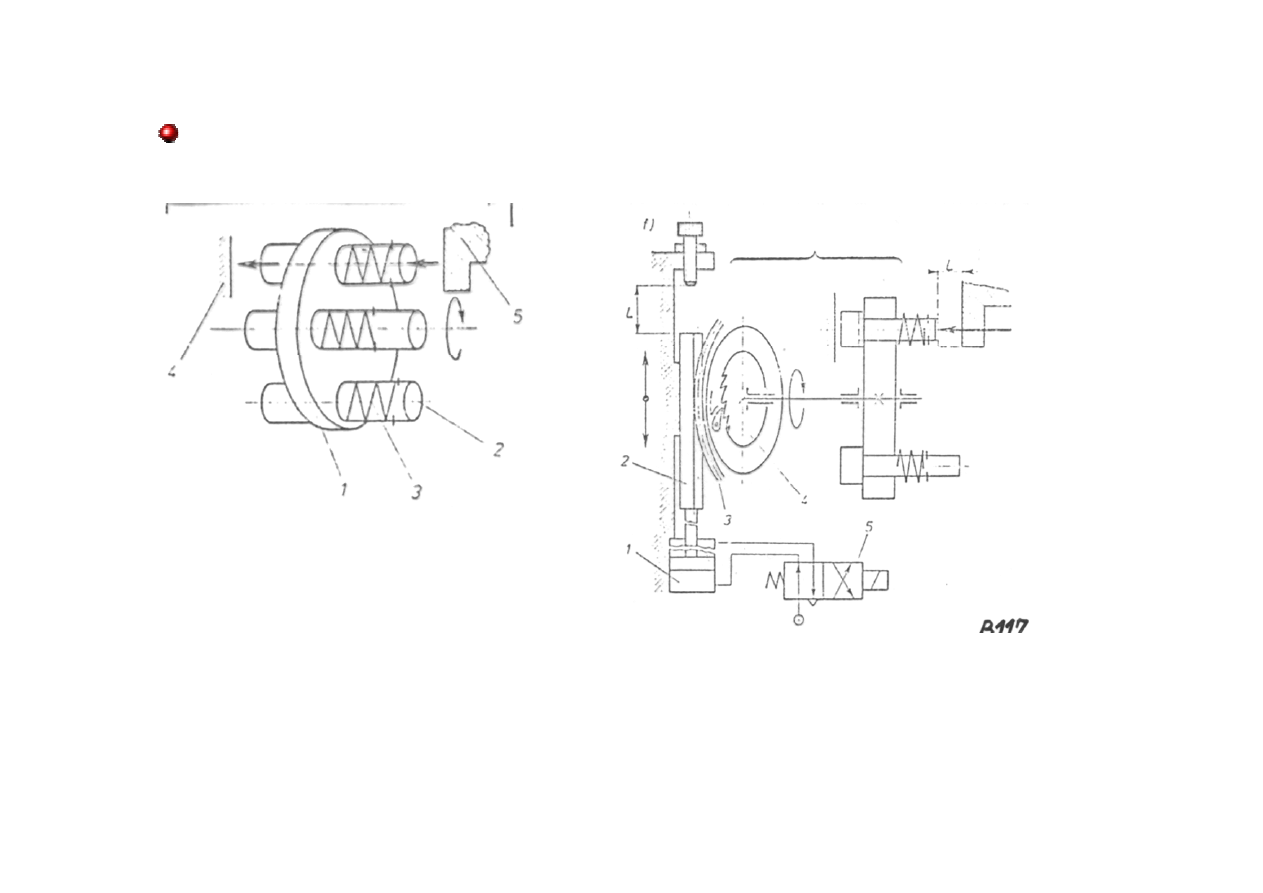
18
obrotowych tarcz z wieloma zderzakami
- rewolwerowych
- z mechanizmem zapadkowym
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
19
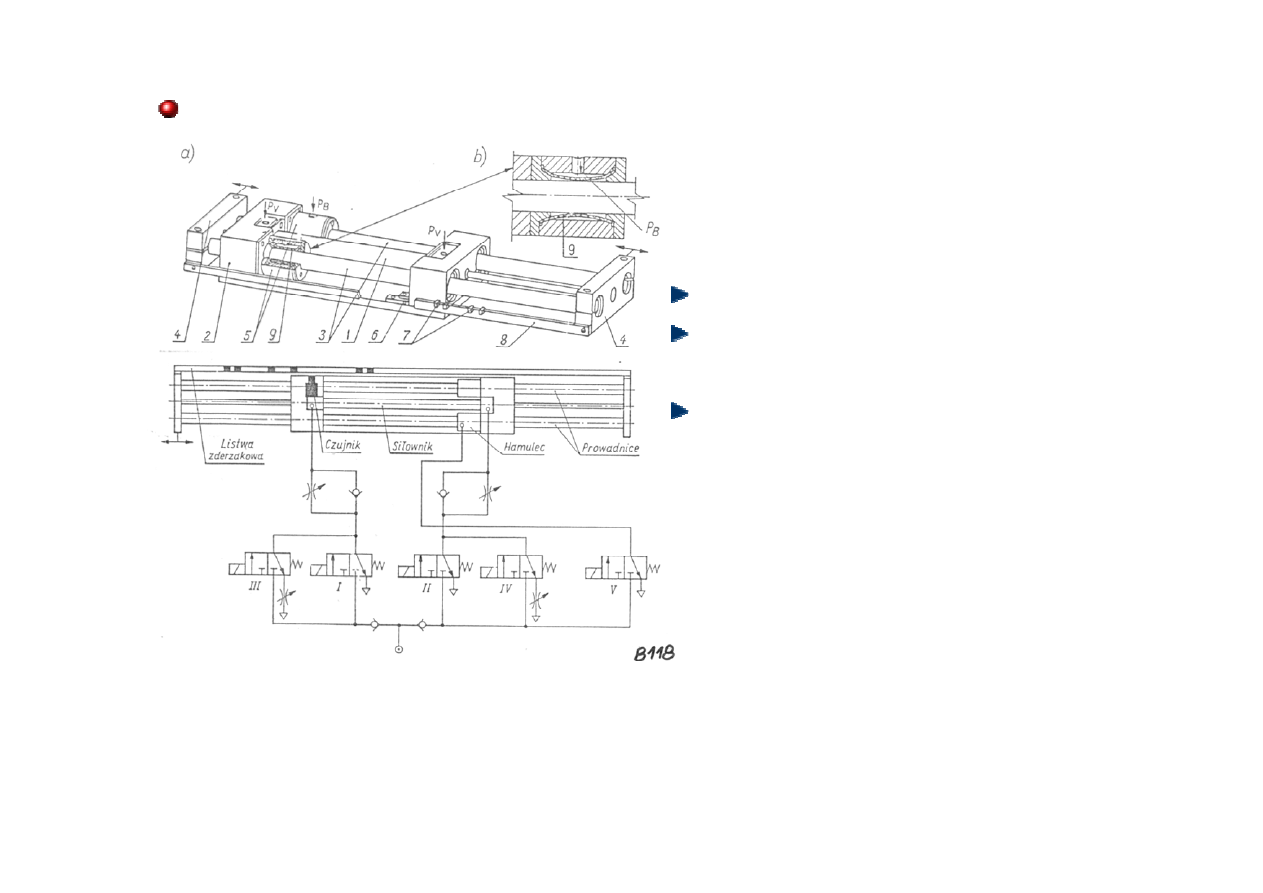
hamulców
ciernych
3 fazy hamowania:
redukcja prędkości
stabilizacja prędkości
v
≈0.04 m/s
zatrzymanie
Wykorzystuje się bezstykowe
czujniki położenia
Powtarzalność pozycjonowania:
±0.2 mm
szczęki zaciskane pneumatycznie lub elektromagnetycznie
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
20
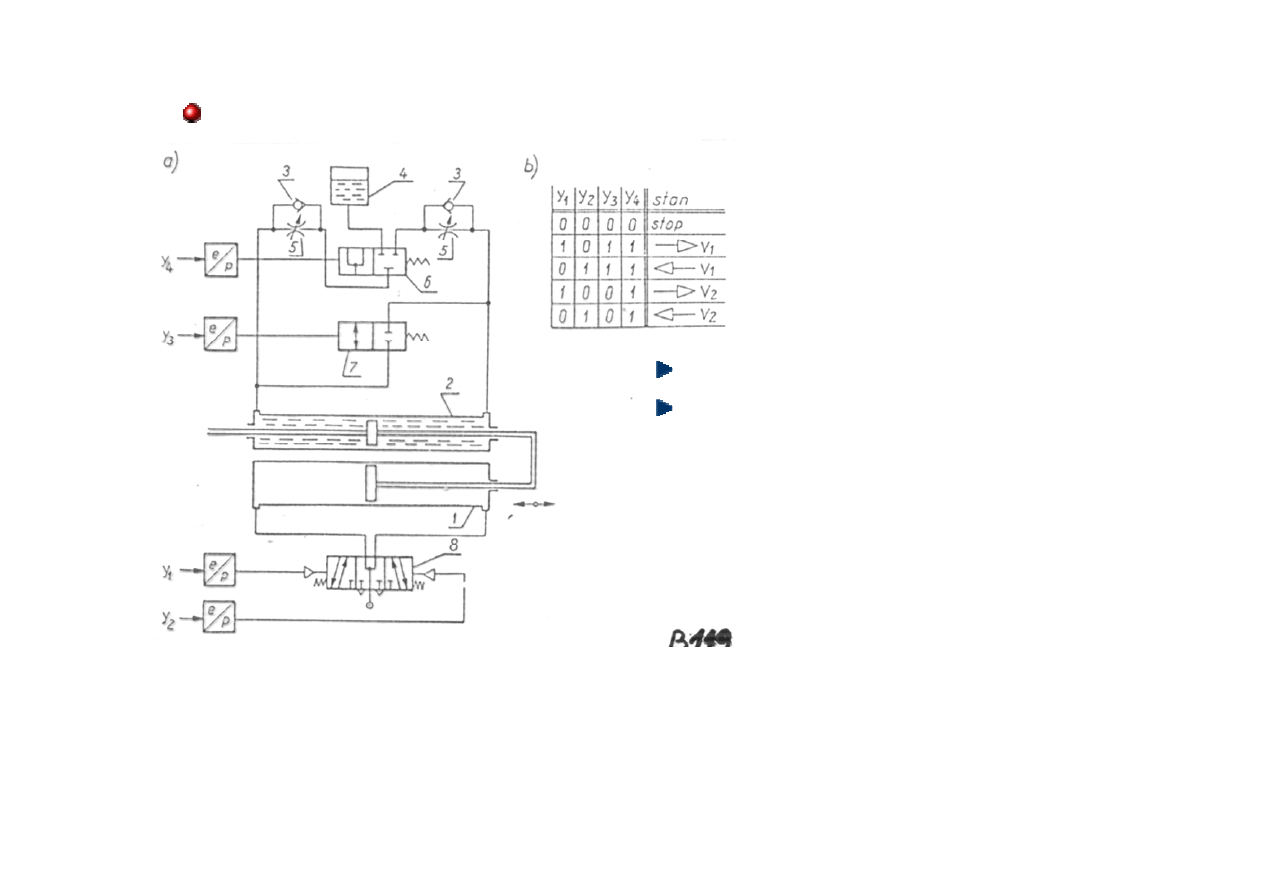
hamulców
hydraulicznych
redukcja prędkości - dławienie
zatrzymanie - odcięcie
Powtarzalność pozycjonowania:
±0.5 mm
Duże opory ruchu w układzie
hydraulicznym – ograniczenie
prędkości i sprawności
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
21
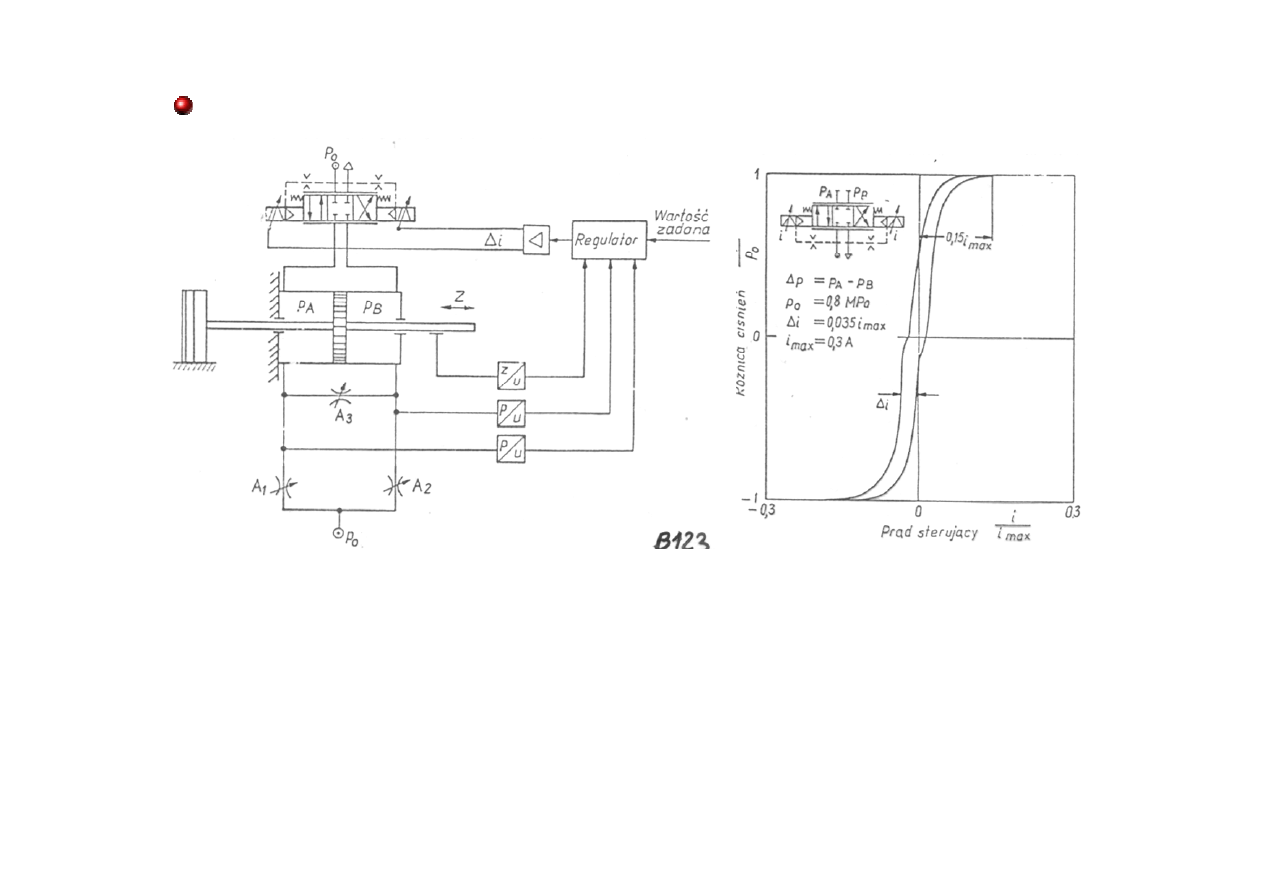
Duża ściśliwość powietrza jest głównym problemem budowy
precyzyjnych serwonapędów pneumatycznych
Dodatkowo istotna jest trudność wykonania precyzyjnych zaworów
suwakowych
Sterowanie proporcjonalne
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
22
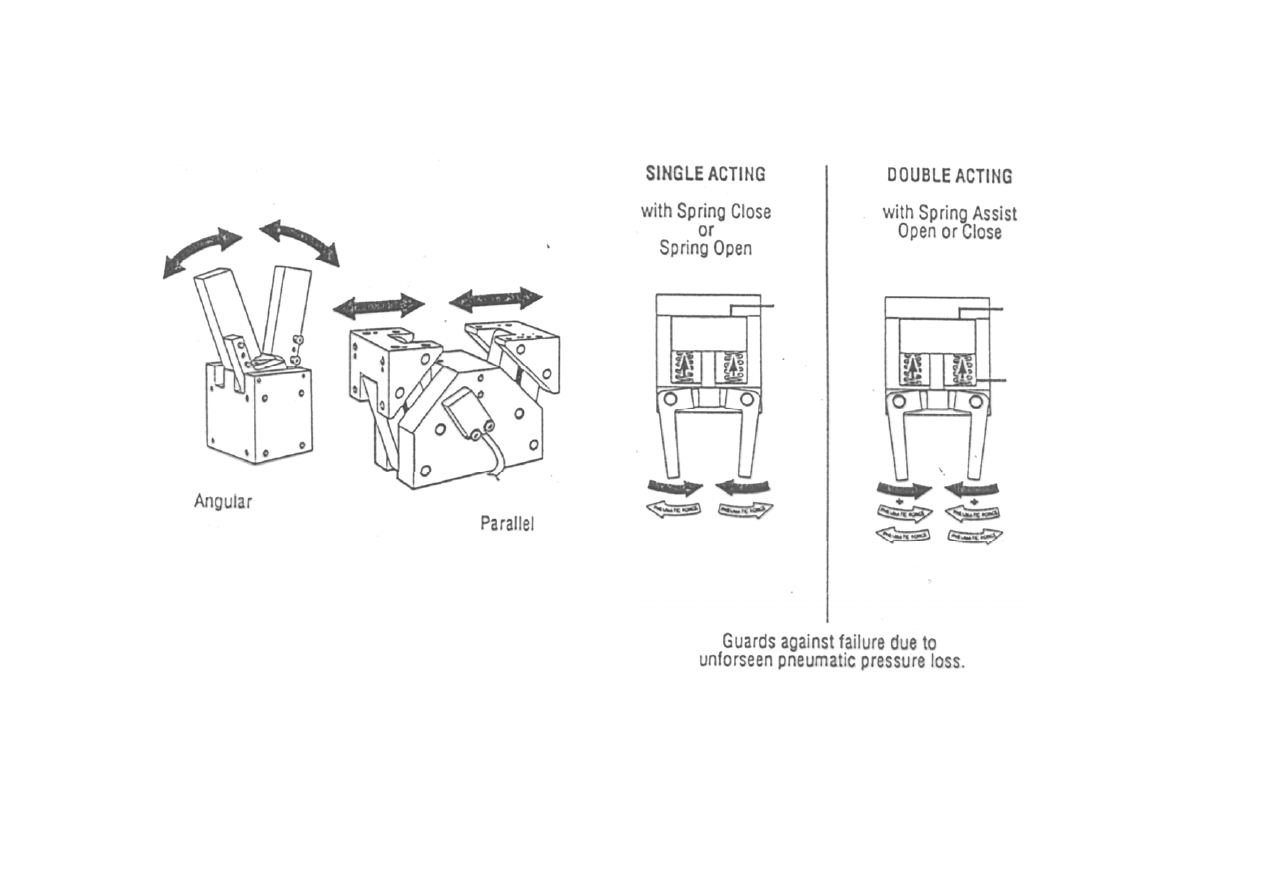
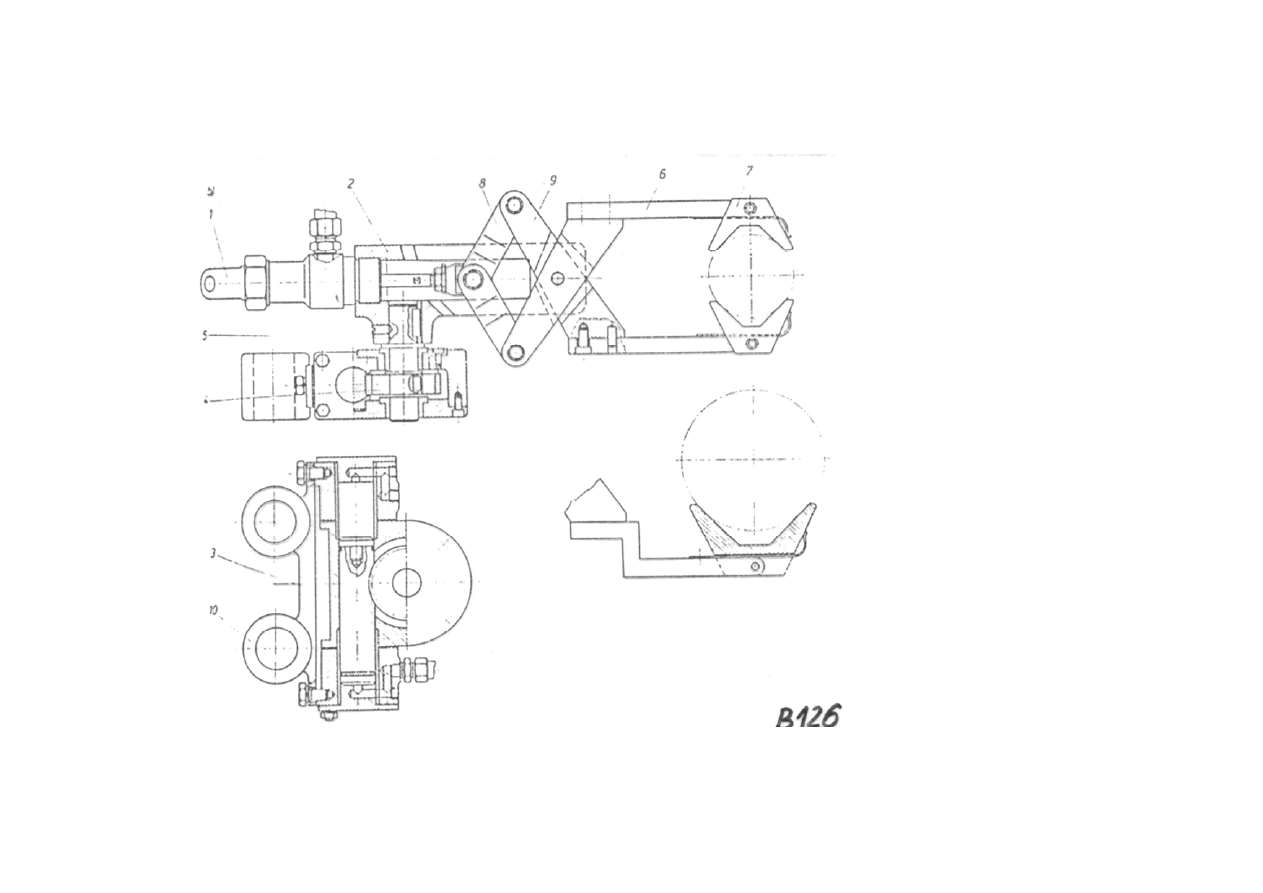
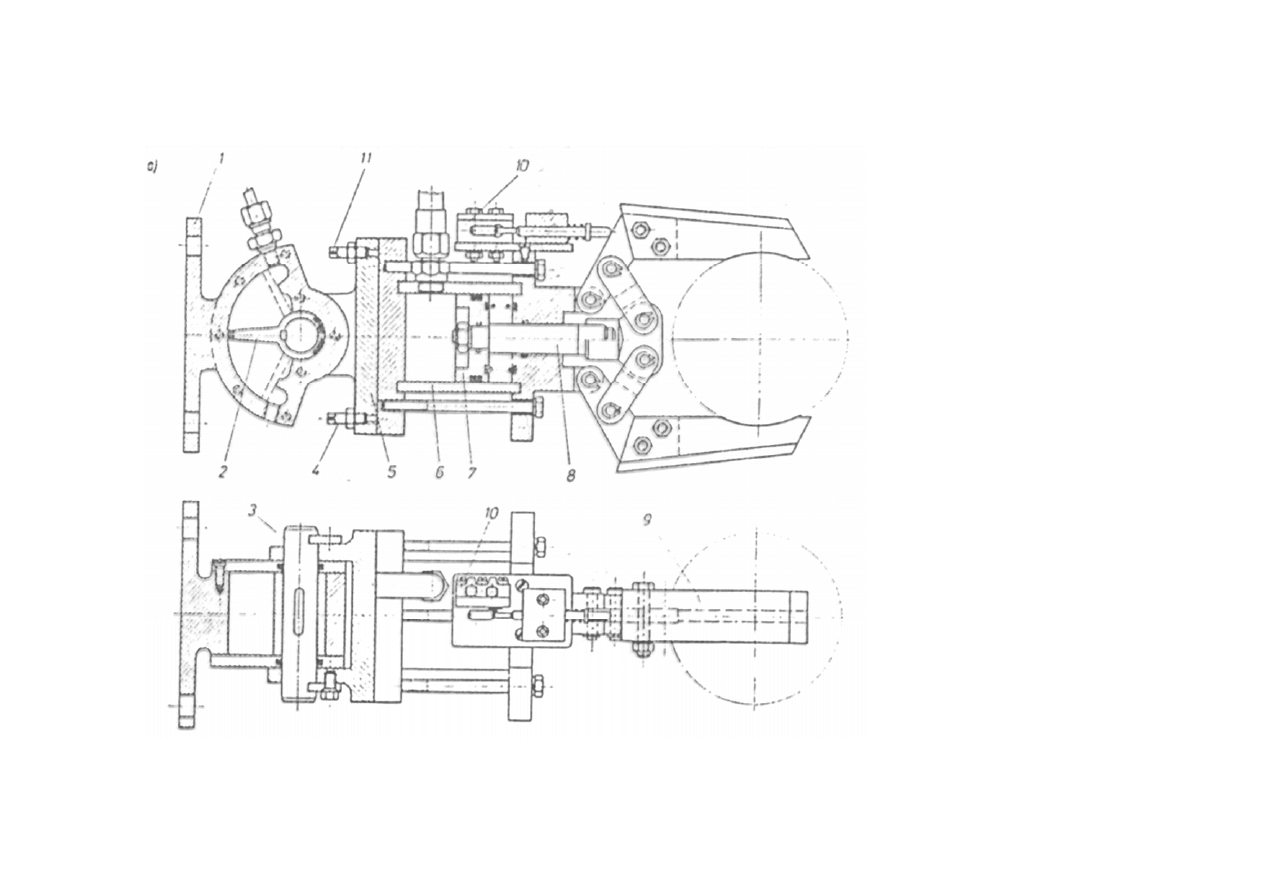
Przykłady zastosowania napędu pneumatycznego w manipulatorach
Najczęściej wykorzystuje się napędy pneumatyczne w chwytakach
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
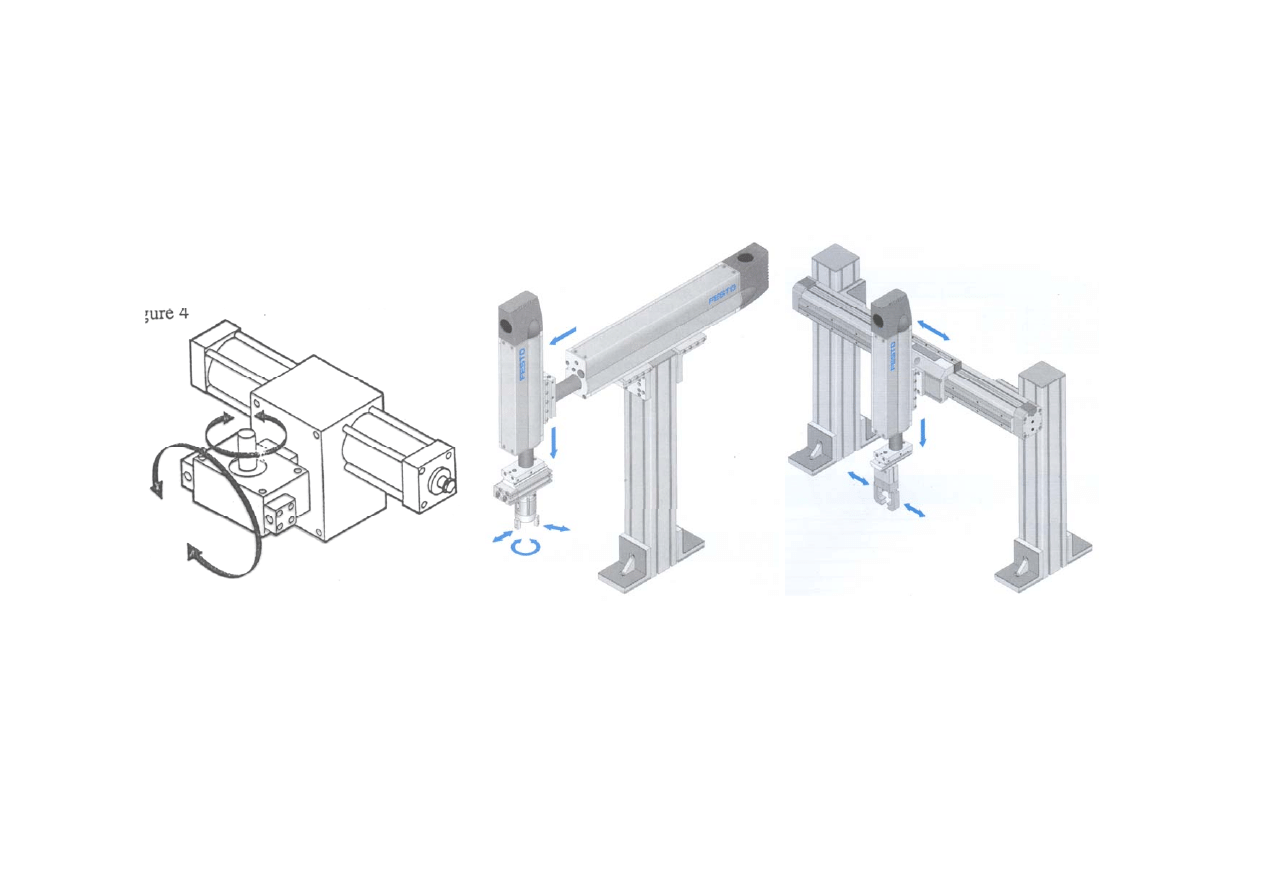
23
Obrót chwytaka – siłownik liniowy
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
24
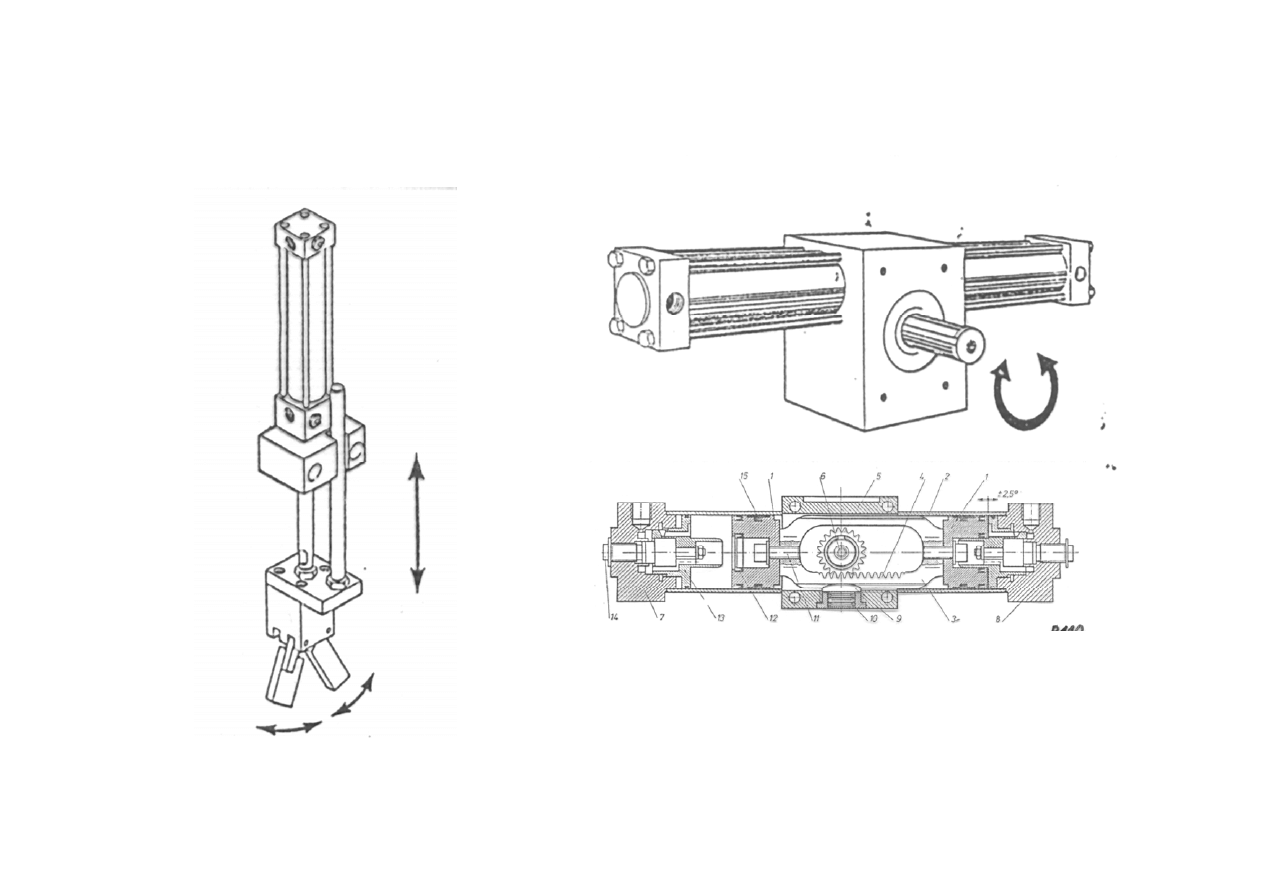
Obrót chwytaka – siłownik łopatkowy
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
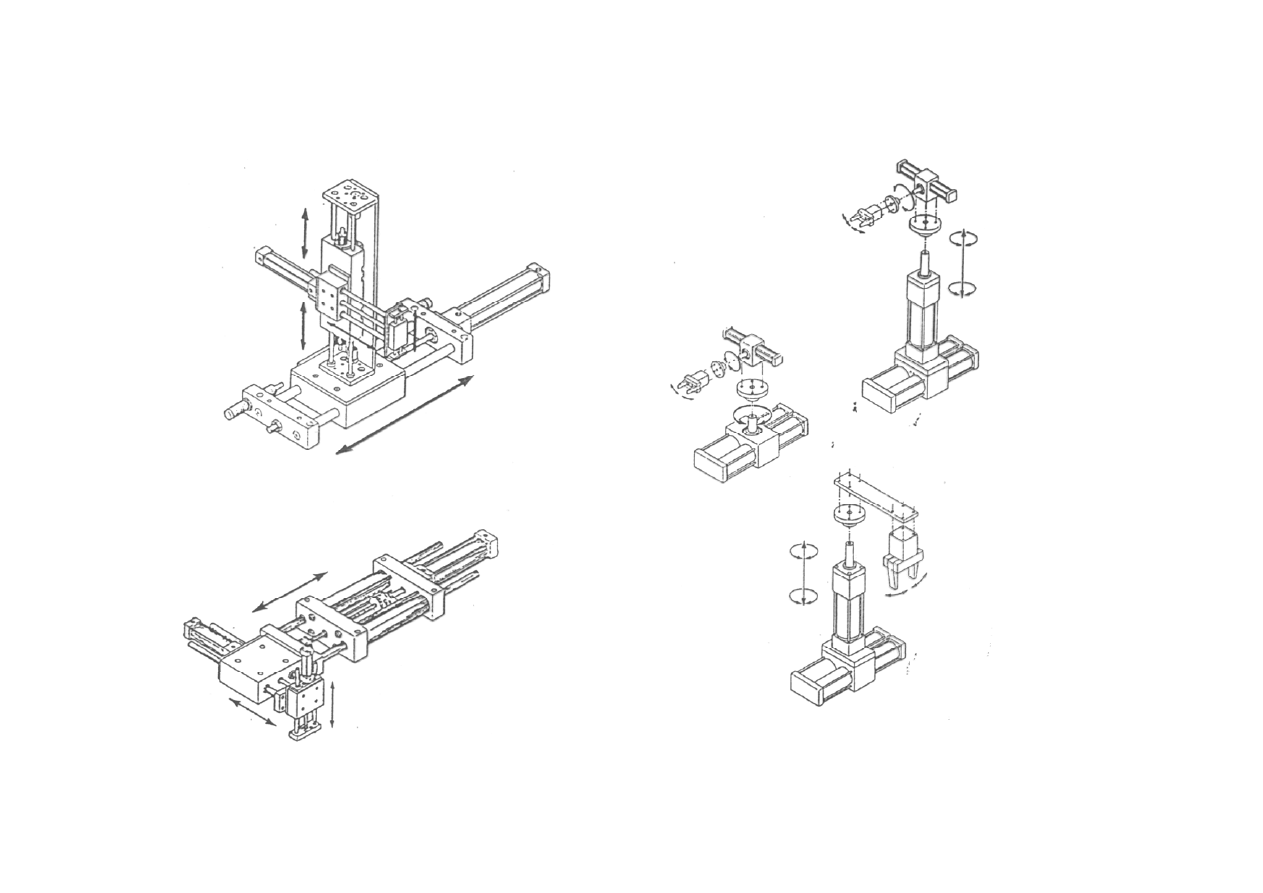
25
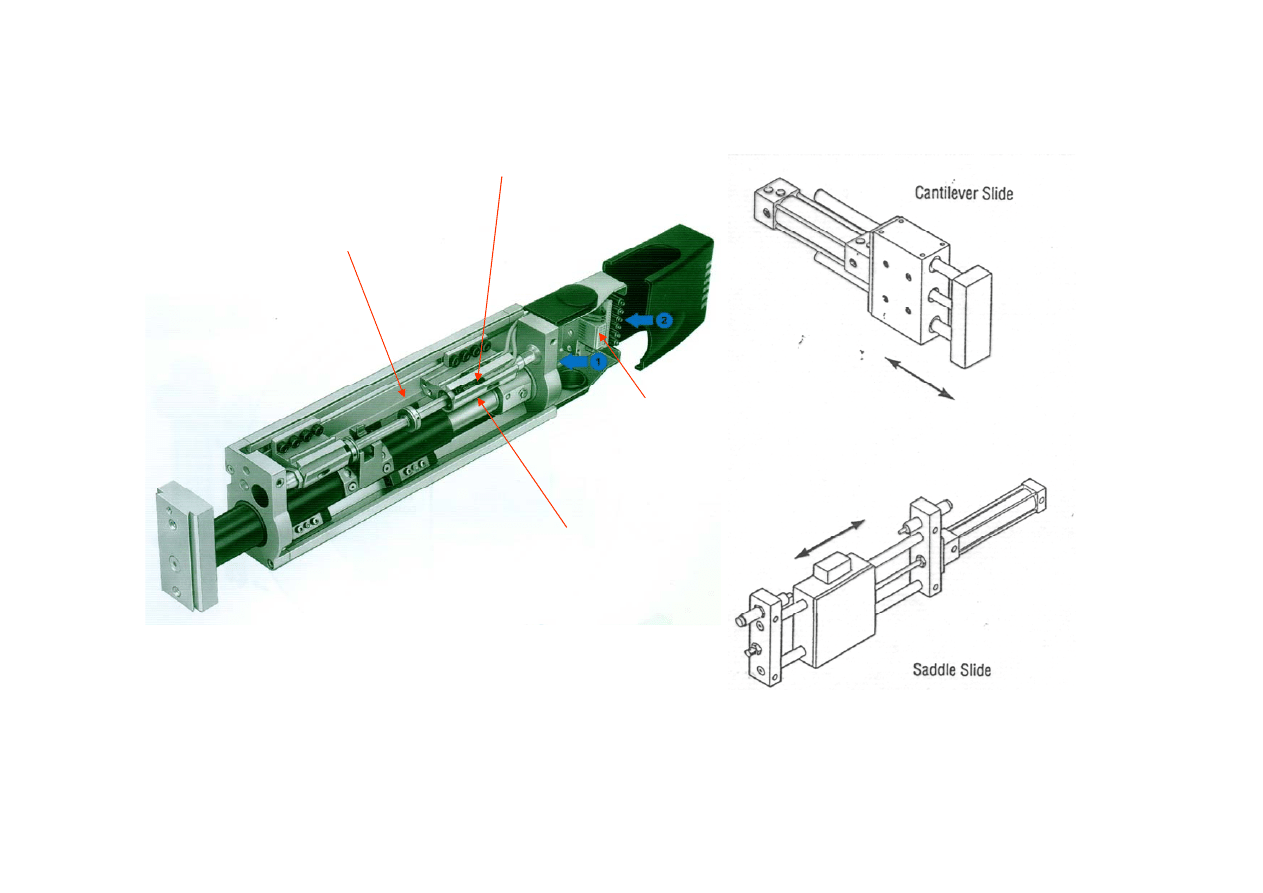
Moduł ruchu liniowego
uniemożliwiający obrót tłoka w
cylindrze
Moduł ruchu obrotowego
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
26
Standardowe prowadnice:
Obciążenia poprzeczne, tarcie
(Festo)
Nastawianie
zakresu
amortyzacja
czujnik
położenia
interfejs
pneumatyczny
i elektryczny
skok: 0.05 m – 0.4 m
v
max
: 1 m/s
RP: 0.01 mm
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
27
Połączone moduły ruchu:
(Festo)
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
28
Manipulator PPP
Manipulatory modułowe
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
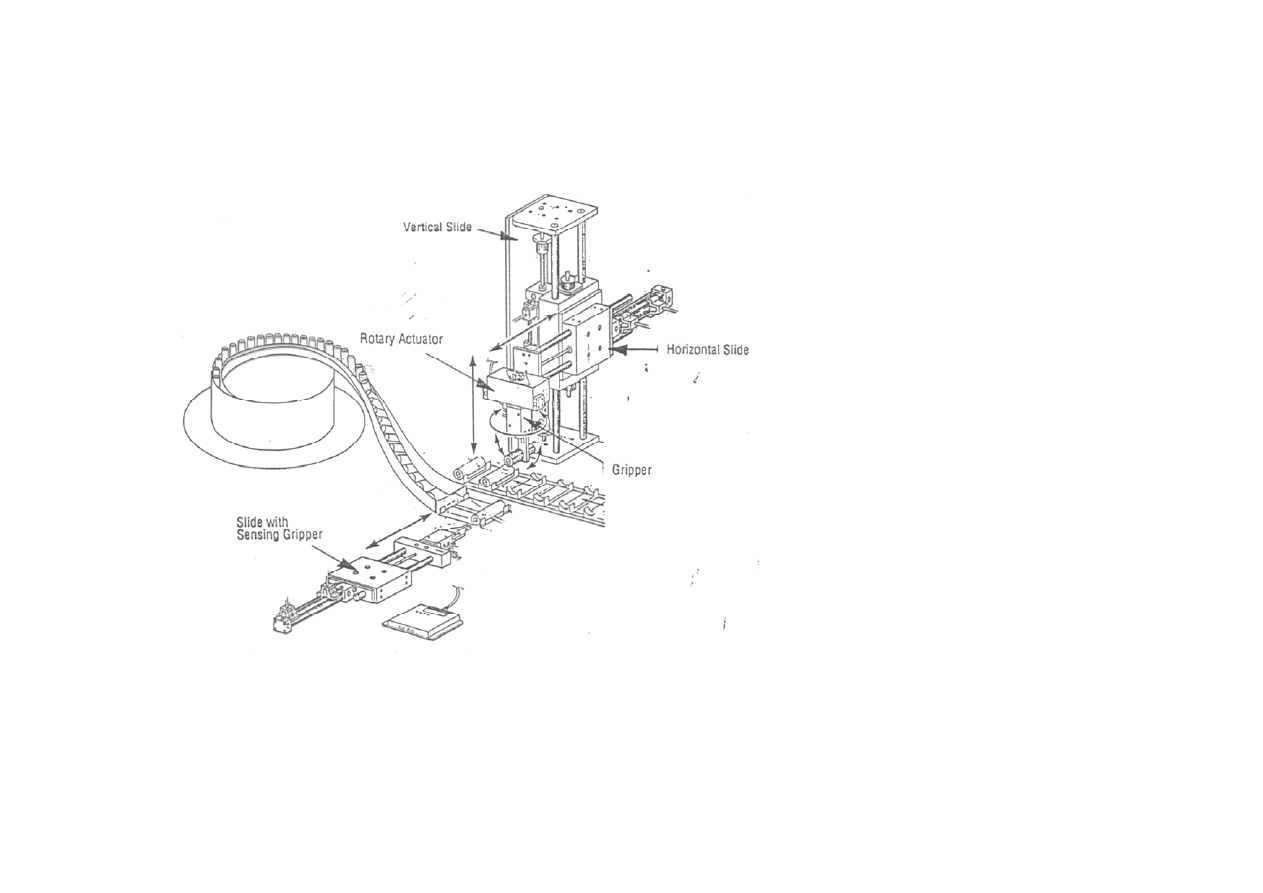
29
Pozycjonowanie zderzakowe – manipulator o strukturze RPRPR
Obsługa tokarki
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
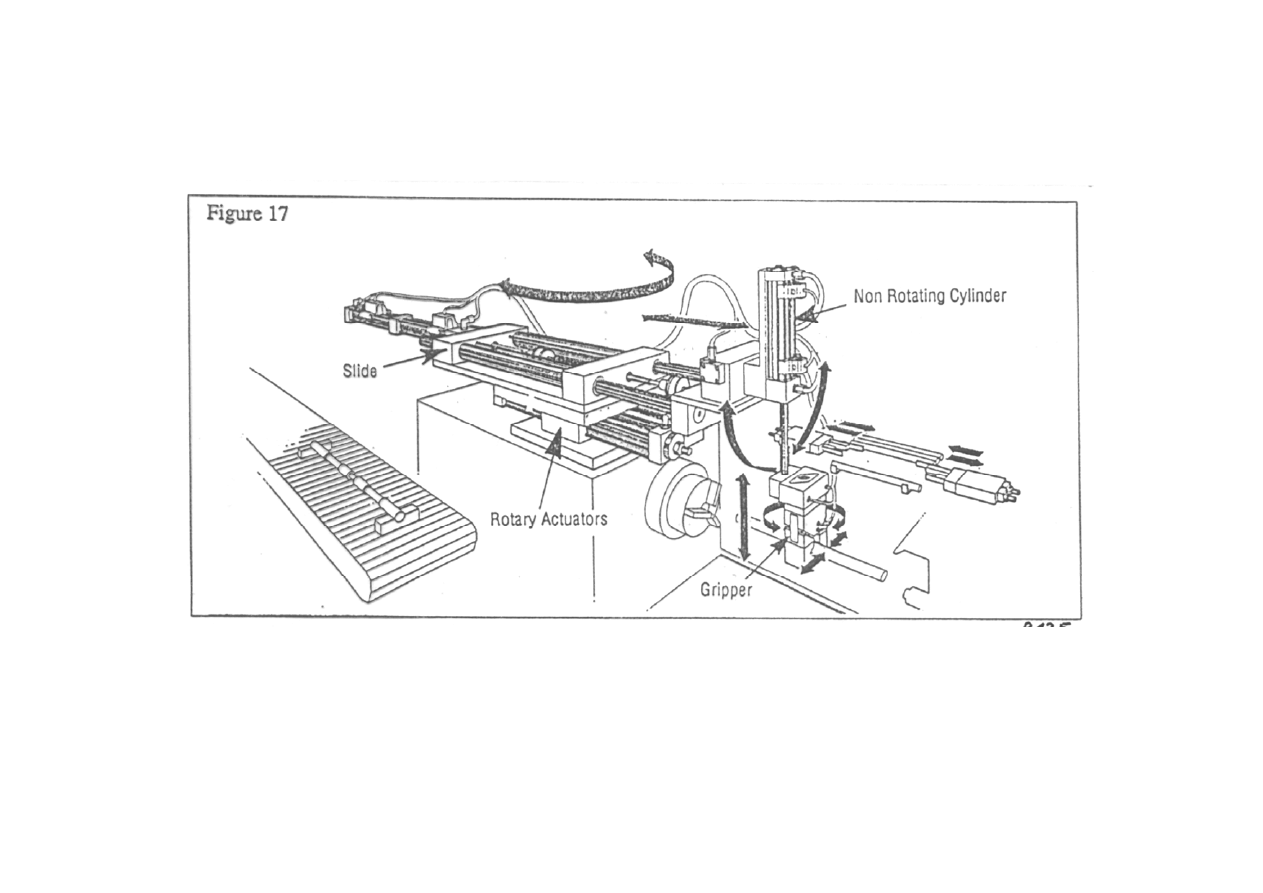
30
Moduł ruchu liniowego + manipulator o strukturze PPR
Orientowanie tulejek przed szlifowaniem
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
31
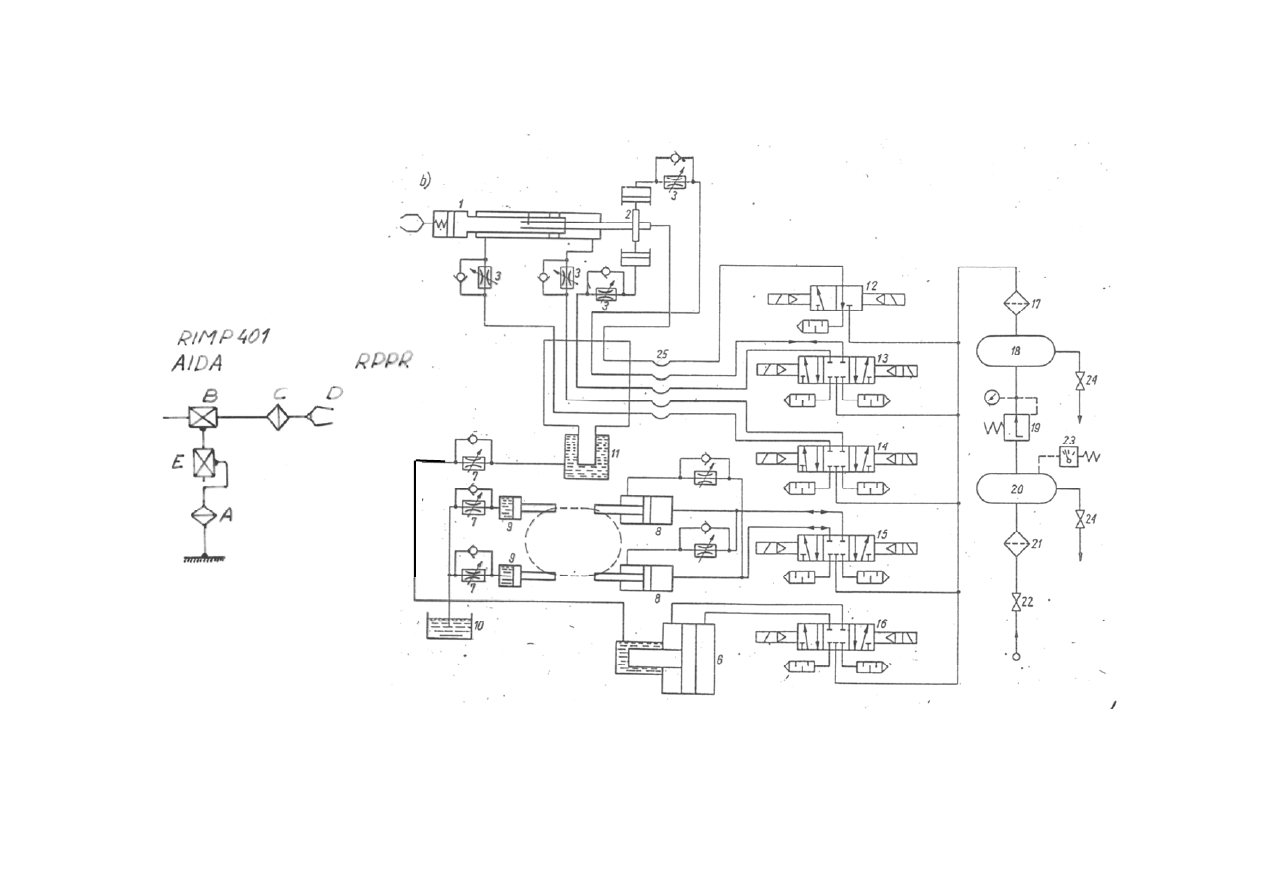
Manipulator AIDA Autohand
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
32
Ocena zastosowania napędów hydraulicznych w manipulatorach
Zalety
Wady
+ Duży współczynnik
Moc/Masa
+ Możliwość stosowania
bezpośrednio w przegubach
jako napęd bezpośredni albo
z przekładnią o małym
przełożeniu (duży moment
przy małej prędkości)
+ Duża sztywność
-
Zwykle brak zakładowej sieci
hydraulicznej - duży koszt
lokalnych układów zasilania
dla pojedynczych lub grup
manipulatorów
- Serwozawory mają
skomplikowaną konstrukcję
i są drogie
- Napędy wymagają ciągłej
konserwacji
- Stosunkowo mała sprawność
- Zmiana lepkości
z temperaturą
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
33
ELEMENTY NAPĘDU HYDRAULICZNEGO
ZASILACZ - źródło energii pierwotnej (silnik + pompa)
SIEĆ
- przewody, zawory,
akumulator
akumulator
EL. STERUJĄCE
- zawory sterujące natężeniem przepływu i/lub
ciśnieniem
EL. WYKONAWCZE - silnik/siłownik przetwarzający energię
potencjalną płynu na energię mechaniczną
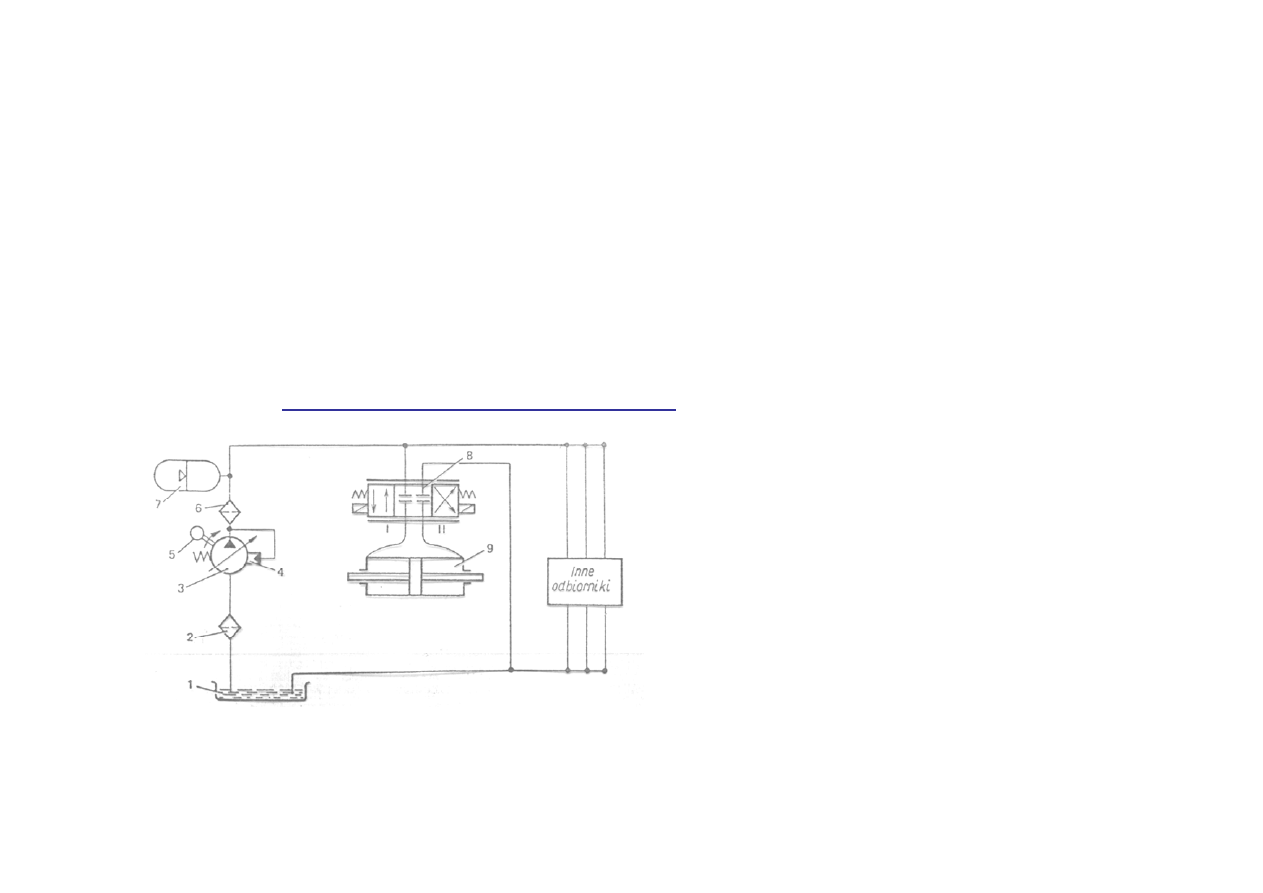
Napęd z pompą o zmiennej wydajności
Akumulator Hydrauliczny
- pozwala stosować pompy
o mniejszej wydajności/mocy
- służy do odprowadzania ciepła
z czynnika roboczego
- łagodzi uderzenia w sieci
hydraulicznej powstałe w czasie
otwierania/ zamykania zaworów

Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
34
CZYNNIK ROBOCZY -
OLEJ MINERALNY
- lepkość maleje z temperaturą
- dobry przewodnik ciepła (chłodzenie)
CIŚNIENIE - do 100 bar co umożliwia stosowanie stosunkowo lekkich i
giętkich przewodów zasilających
GŁÓWNE PROBLEMY ZASTOSOWANIA
dostarczanie czynnika do członów wykonawczych przy zmianach
wzajemnego ustawienia członów w czasie ruchu
zminimalizowanie wycieków z armatury
filtracja czynnika, którego cząstki: blokują serwozawory, powodują
erozję rozdzielaczy i powierzchni tłoka, zwiększają lepkość oleju,
zmieniają charakterystykę sztywności oleju
hałas
ograniczona prędkość przepływu ze względu na turbulencje przepływu
(kawitacja) oraz zwiększanie się temperatury (obniżanie się lepkości)
nieliniowość charakterystyk elementów sterujących i wykonawczych
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
35
STEROWANIE NAPĘDAMI HYDRAULICZNYMI
ZAWÓR ROZDZIELAJĄCY napędzany:
pośrednio przez wstępny stopień
wzmocnienia lub bezpośrednio
przez silnik elektryczny, sterowane
sygnałem elektrycznym w przypadku
zastosowania SERWOZAWORÓW
silnikiem elektrycznym w przypadku
SERWOMECHANIZMÓW
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
36
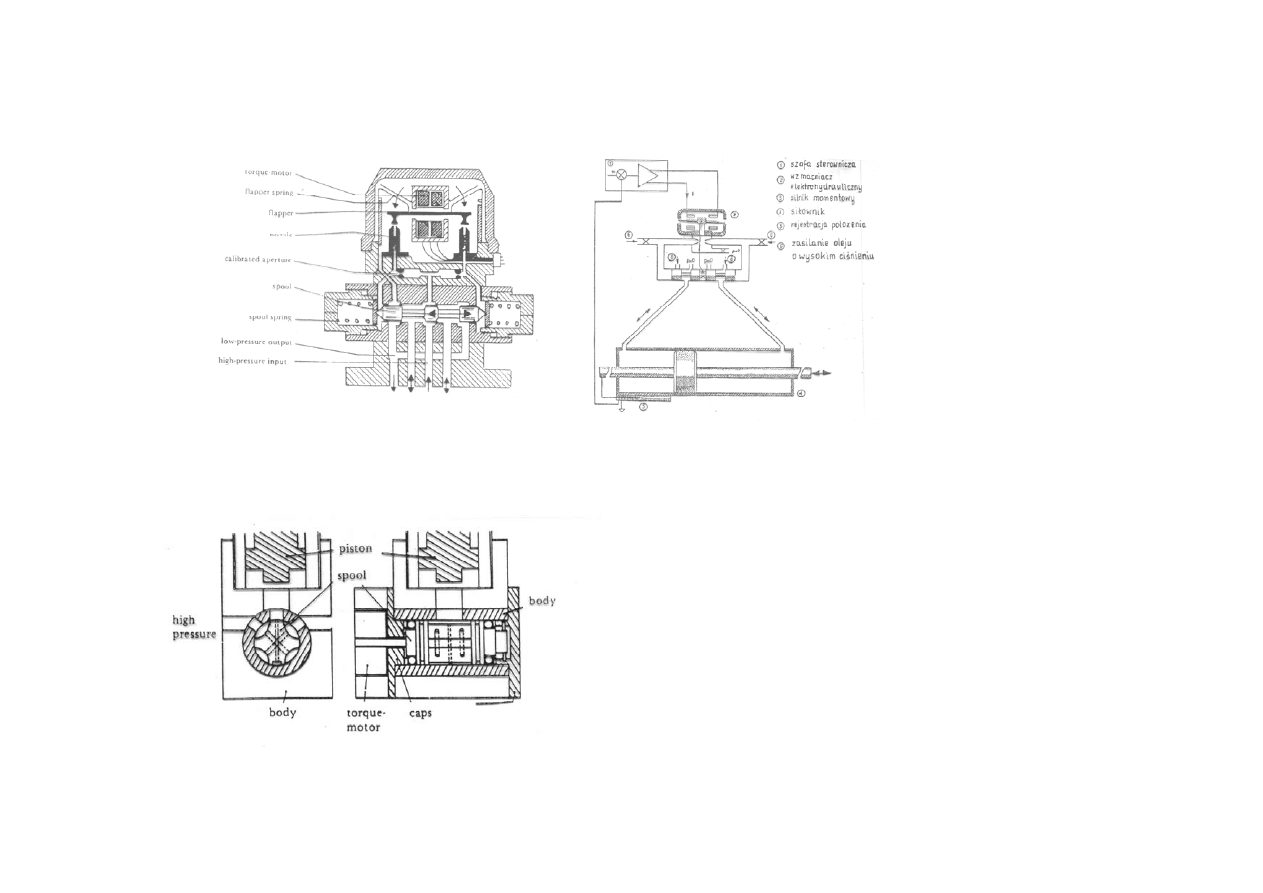
Serwozawory dwustopniowe - ElektroHydroMechaniczne
Serwozawory jednostopniowe
– Elektro-Mechaniczne
liniowo proporcjonalna
zależność strumienia
przepływającego przez okno
wyjściowe rozdzielacza do
sygnału wejściowego
serwozaworu (natężenia prądu
lub napięcia)
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
37
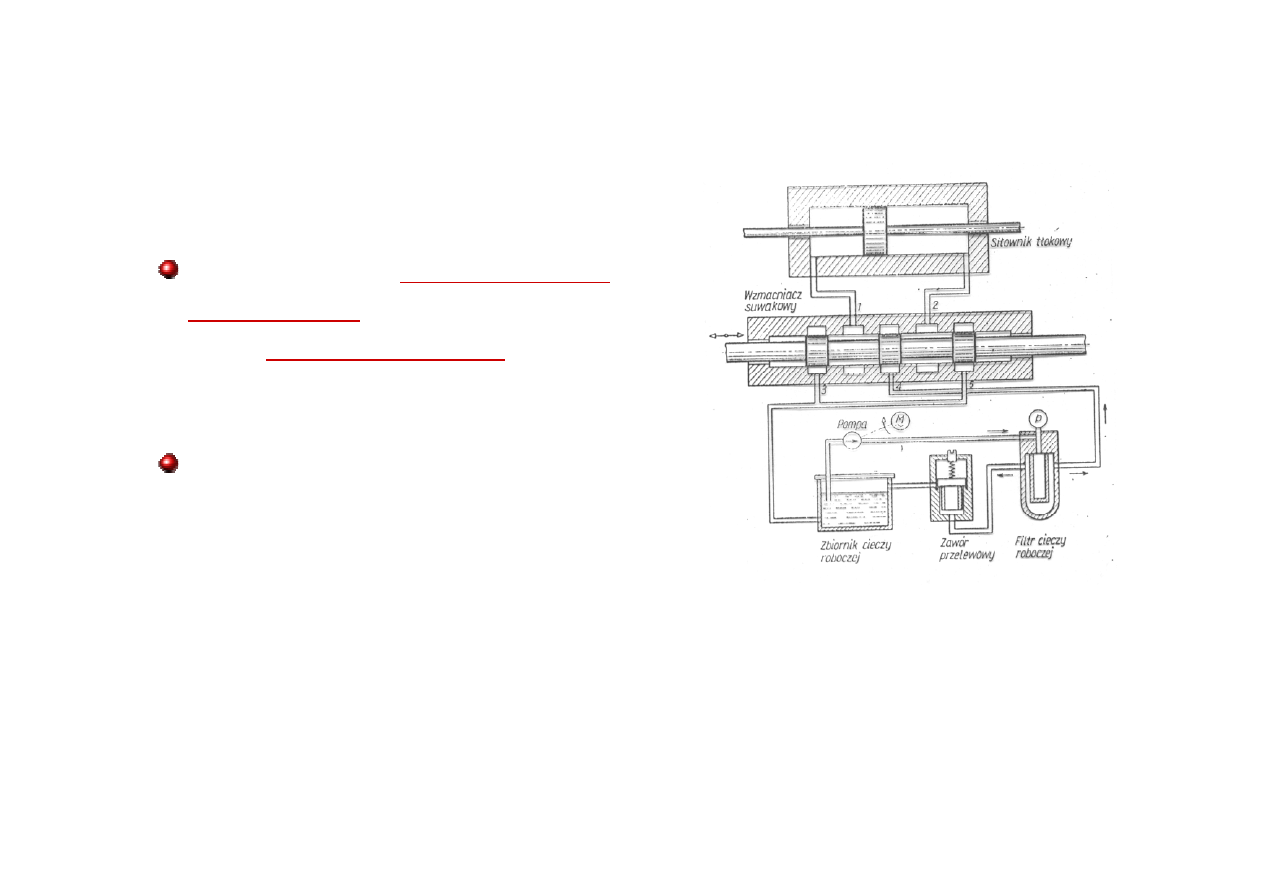
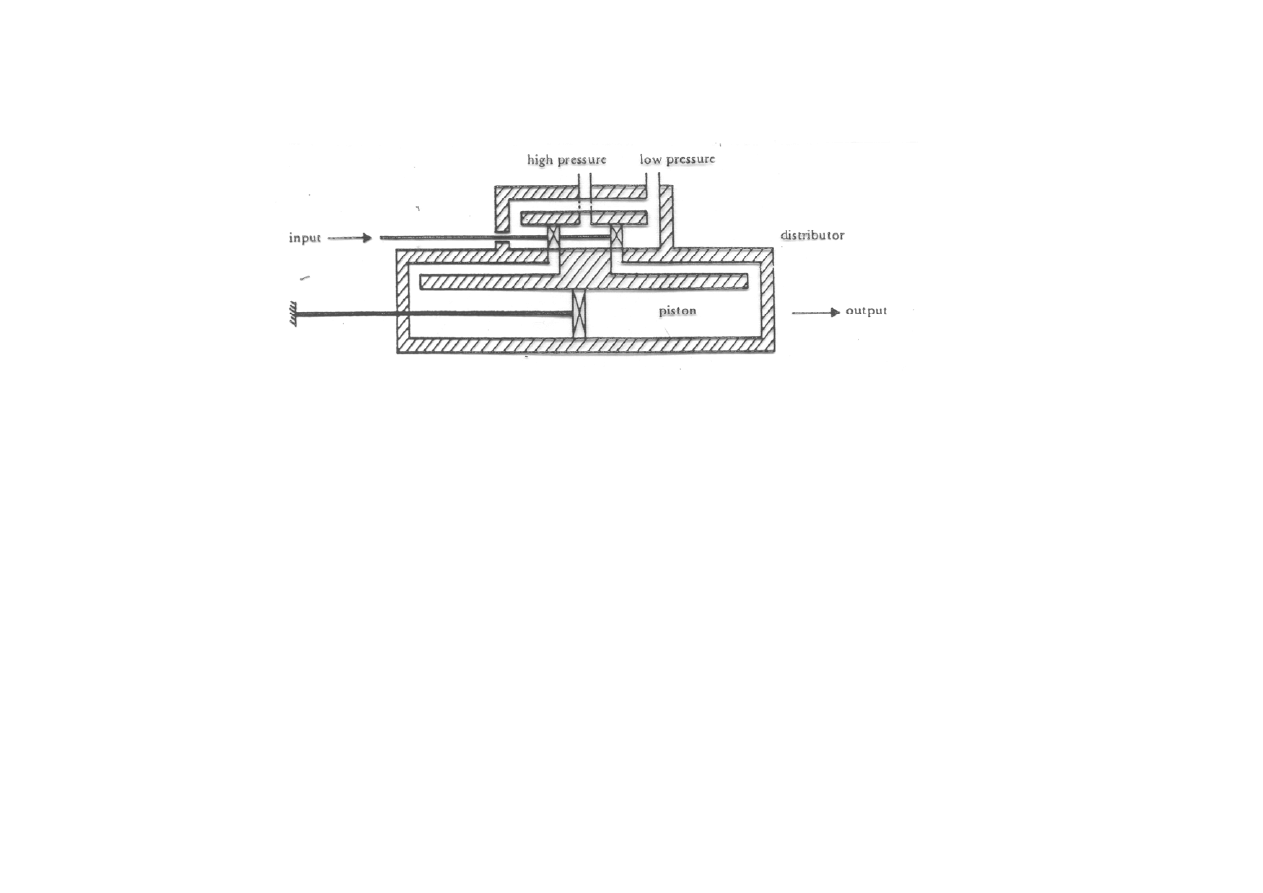
SERWOMECHANIZMY HYDRAULICZNE
Siła/moment używane do przemieszczenia suwaka może być nawet
10000 razy mniejsza od siły/momentu uzyskiwanego w siłowniku (siły te
nie są proporcjonalne)
UWAGA:
Na hydrauliczny napęd manipulatora w spoczynku działa siła
zewnętrzna, powoduje to wymóg ciągłego otwarcia okien rozdzielacza,
które zapewnia uzyskanie potrzebnej różnicy sił parcia oraz kompensację
przecieków
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
38
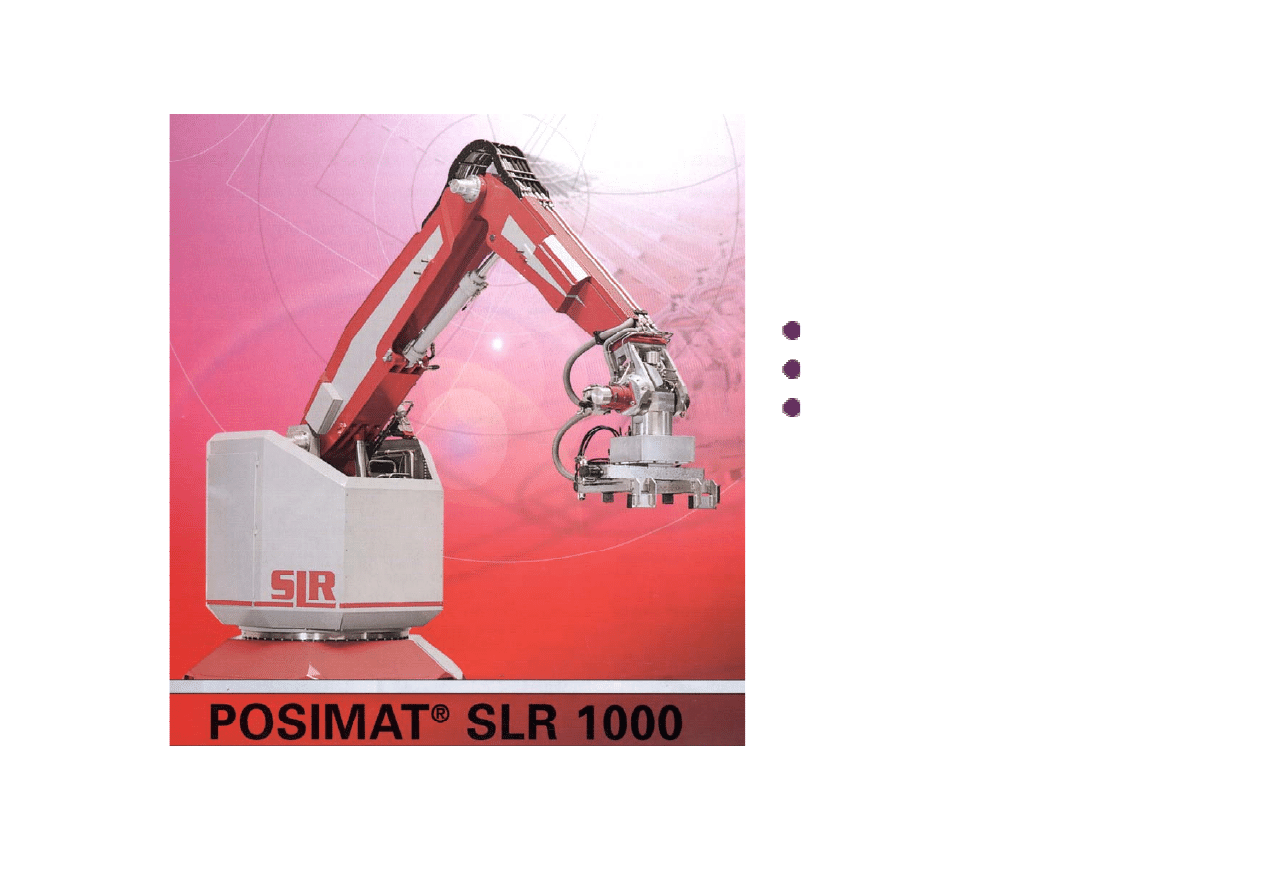
Napęd hydrauliczny:
udźwig 1000 kg
masa 5000 kg
promień PR: 4.1 m
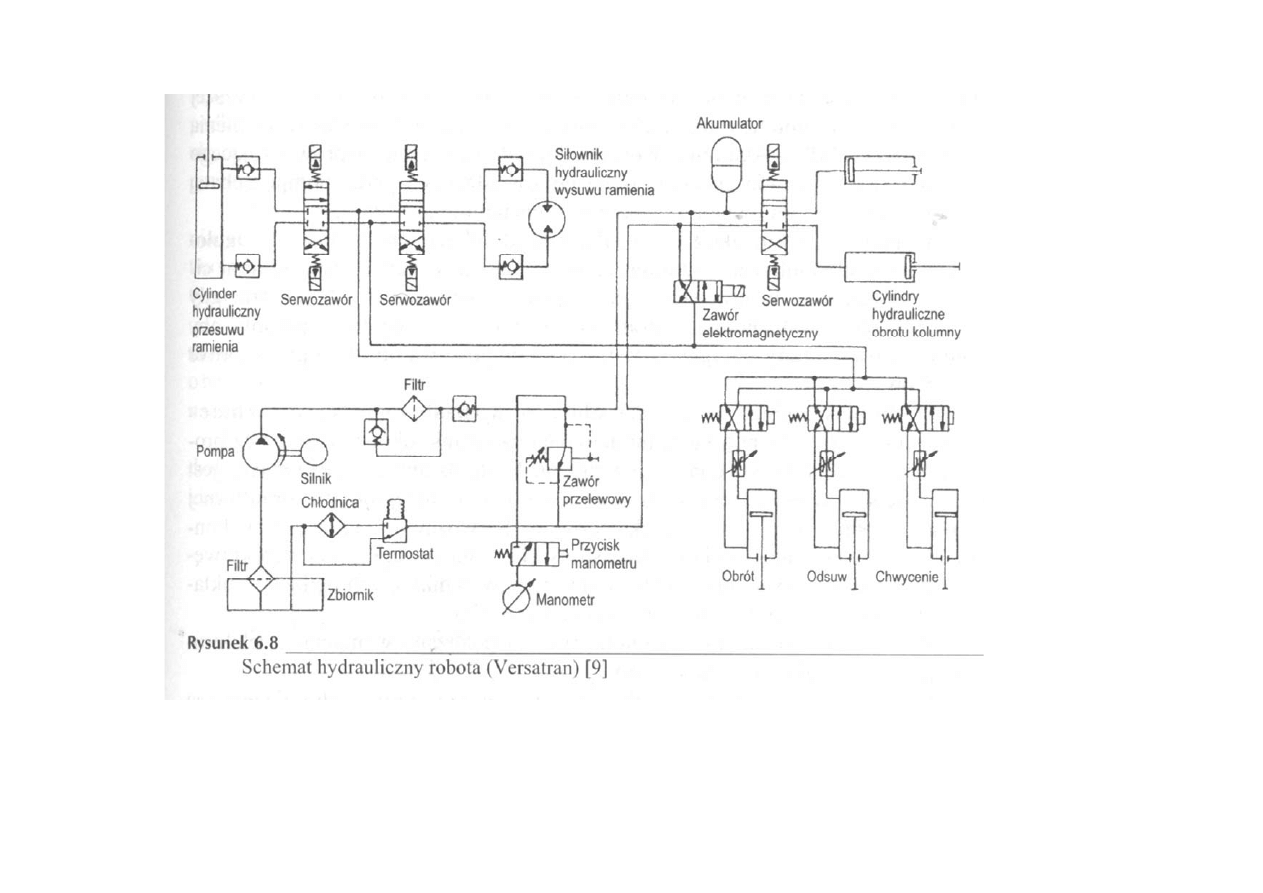
Roboty przemysłowe
KRIM, WIMIR, AGH w Krakowie
39
(Honczarenko)
Wyszukiwarka
Podobne podstrony:
8 Technika zastosowania napędów elektrycznych
Urządzenia techniczne z zastosowaniem magnesu, Konspekty dla 5-6 latków
Projekt I Sztuczna Inteligencja, Sprawozdanie, Techniczne zastosowanie sieci neuronowych
Kopia 4.17, mp 4.17, POLITECHNIKA WROCŁAWSKA INSTYTUT TECHNIKI CIEPLNEJ I MECHANIKI PŁYNÓW
StrTyt ZMiOA 1st, Instytut Techniki Cieplnej i Mechaniki Płynów
10 Techniczne zastosowania materiałów inżynierskich i porównanie ich podstawowych własności
pierwszy, Sprawozdanie, Techniczne zastosowanie sieci neuronowych
L410W, POLITECHNIKA WROCŁAWSKA INSTYTUT TECHNIKI CIEPLNEJ I MECHANIKI PŁYNÓW
SPRAWOZDANIE Z PNOMu NA 11, Studia, Pnom, 7. Techniczne zastosowanie materiałów inż
plynymoje412, POLITECHNIKA WROCŁAWSKA INSTYTUT TECHNIKI CIEPLNEJ I MECHANIKI PŁYNÓW
Cw nr 2, Instytut Techniki Cieplnej i Mechaniki Płynów
DANE TECHNICZNE OSIE NAPĘDOWE
techniczne zastosowanie materiałów inżynierskich i porównanie ich podstawowych własnościx
LESLIE M LeCRON AUTOHIPNOZA TECHNIKI I ZASTOSOWANIE W ŻYCIU CODZIENNYM
LeCron Leslie M Autohipnoza Techniki i zastosowanie w życiu codziennym
TECHNIKI SONDAŻU Z ZASTOSOWANIEM ANKIETY.(1), Dokumenty do szkoły, przedszkola; inne, Metody, metody
więcej podobnych podstron