
Mechatronika w medycynie
----------------------------------------------------------------------------------------------------------------------
Prowadzący: dr inż. E. Świątek – Najwer
Wykorzystanie systemu nawigacji elektromagnetycznej w
celu zwizualizowania ruchu konkretnego punktu żuchwy w
płaszczyźnie strzałkowej.
Skład grupy:
Kamil Grycz, 194870
Anna Kubiak, 192744
Mariusz Pasek, 194828
Tomasz Pietrowski, 194873
Szymon Szywała 194850
Jacek Wyszomirski, 194 914

1. Wstęp
Systemy nawigacji komputerowej stosuje się w celu określania
położenia punktu w przestrzeni. Realizację identyfikowania punktu,
a właściwie odpowiedniego markera umieszczonego na przedmiocie,
dokonuje się poprzez zastosowanie następujących systemów nawigacji:
Nawigację za pomocą mechanicznego pozycjonowania
Nawigację ultradźwiękową
Nawigację elektromagnetyczną
Nawigację optyczną
2. Cel ćwiczenia
Zapoznanie
z
systemem
nawigacji
elektromagnetycznej
wykorzystywanym w medycynie. Poznanie sposobu działania nawigacji
elektromagnetycznej Aurora oraz zwizualizowanie ruchu punktu żuchwy
w płaszczyźnie strzałkowej.
3. Przebieg ćwiczenia
Ćwiczenie zostało przeprowadzone na szkielecie znajdującym się
w laboratorium. Etapy ćwiczenia były realizowane zgodnie z poniższymi
punktami:
1) Ustalenie ramki na żuchwie jako punkt referencyjny
2) Identyfikacja punktu na żuchwie w płaszczyźnie strzałkowej
względem referencji na żuchwie
3) Identyfikacja punktu na czole w płaszczyźnie strzałkowej względem
referencji na głowie
4) Identyfikacja punktu na nosie w płaszczyźnie strzałkowej względem
referencji na głowie
5) Identyfikacja punktu między zębami w płaszczyźnie strzałkowej
względem referencji na głowie
6) Identyfikacja ruchu żuchwy w płaszczyźnie strzałkowej względem
referencji na głowie
7) Identyfikacja rotacyjnego ruchu żuchwy względem referencji na
głowie
4. Przekształcenia układów współrzędnych i przykłady obliczeń
W celu wyznaczenia trajektorii ruchu żuchwy w płaszczyźnie
strzałkowej względem ramki umieszczonej na głowie należało dokonać
transformacji układu współrzędnych zorientowanego względem markera
umieszczonego na żuchwie do głównego układu współrzędnych
zorientowanego względem ramki umieszczonej na głowie. Czynności
związane z przekształceniem układu współrzędnych zaczęto od przejścia
z punktu na żuchwie do ramki ustalonej na żuchwie. W tym celu
zastosowano następującą macierz translacji:
Równanie 1. Macierz translacji względem osi układu współrzędnych.
gdzie: a, b, c to przesunięcia wzdłuż osi współrzędnych X, Y oraz Z
Następnym krokiem było przejście z układu współrzędnych
zorientowanego względem ramki na żuchwie do układu zorientowanego
względem ramki na głowie. Oprócz operacji translacji zastosowano
również następujące operacje rotacji względem osi układu
współrzędnych:
Równanie 2. Elementarna macierz rotacji względem osi Z.
Równanie 3. Elementarna macierz rotacji względem osi Y.
Równanie 4. Elementarna macierz rotacji względem osi X.
gdzie α, β, γ są to wartości kąta obrotu względem osi X, Y, Z podane
w stopniach.
Kolejnym krokiem było wyznaczenie ogólnego równania płaszczyzny
strzałkowej na podstawie trzech wcześniej zidentyfikowanych punktów,
czyli czoła, nosa oraz zęba. Wyznaczono dwa wektory ząb-nos oraz czoło-
nos, a następnie policzono iloczyn wektorowy otrzymując w ten sposób
wektor normalny N(A,B,C) płaszczyzny strzałkowej. Równanie ogólne
otrzymano podstawiając do równania A(x-x
0
)+B(y-y
0
)+C(z-z
0
)=0
współrzędne punktu nos(x
0
,y
0
,z
0
) . Ostatnim krokiem było prostopadłe
rzutowanie punktów na płaszczyznę strzałkową.
Przykład rzutowania punktu:
N=[607,01 -7082,34 -1754,22];
% wektor normalny do plaszczyzny
PX=117,39;
% wsp x,y,z punktu ktory bedziemy rzutowac
PY=11,29;
PZ=109,09;
% prosta l : wektor normalny N do plaszczyzny przechodzacy przez P
% l: x(t)=PX + N(1)*t
% y(t)=PY + N(2)*t t nalezy do R
% z(t)=PZ + N(3)*t
% t-parametr dla ktorego prosta l i plaszczyzna przecinaja sie
t=-(N(1)*PX+N(2)*PY+N(3)*PZ)/(N(1)^2+N(2)^2+N(3)^2);
%t=0.0037
%wsp punktu na plaszczyznie
PXn=PX + N(1)*t;
PYn=PY + N(2)*t;
PZn=PZ + N(3)*t;
%otrzymane wsp po rzutowaniu:
%PXn = 119,65
%PYn =-15,14
%PZn = 102,54
5. Wyniki pomiarów
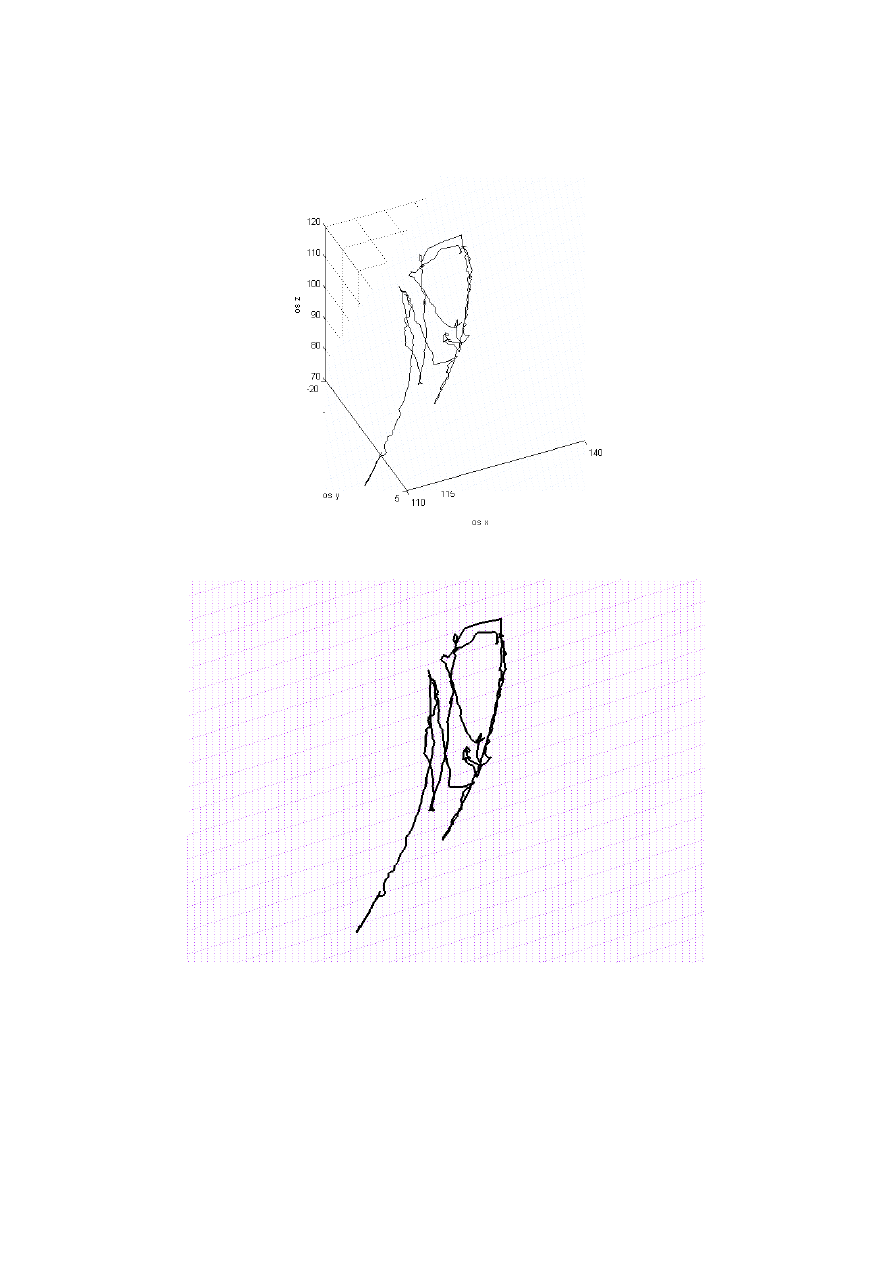
Rysunek 1. Wizualizacja ruchu żuchwy w płaszczyźnie strzałkowej.
Rysunek 2. Wizualizacja ruchu żuchwy w płaszczyźnie strzałkowej (widok powiększony).
Otrzymane wyniki pomiarów przedstawiają tor ruchu punktu
siecznego w płaszczyźnie strzałkowej widziany z prawej strony (Diagram
Posselta). Niestety na podstawie zebranych danych nie udało się uzyskać
idealnego odwzorowania teoretycznego toru ruchu punktu siecznego
w płaszcz. strzałkowej.
6. Wnioski
Zastosowanie
systemu
nawigacji
elektromagnetycznej
daje
możliwość lokalizacji obiektów bez konieczności utrzymywania linii
widoczności pomiędzy lokalizowanymi elementami, a generatorem pola
elektromagnetycznego, co jest niewątpliwie bardzo dużą zaletą tego
systemu pomiarowego, ponieważ zapewnia to nie tylko komfort pracy
personelu medycznego, ale przede wszystkim umożliwia umieszczenie
czujnika bezpośrednio na tzw. końcu narzędzia, znajdującym się
w miejscu wykonywania zabiegu wewnątrz ciała pacjenta. Taka
lokalizacja czujnika zmniejsza ryzyko powstawania błędów pomiarowych
z powodu mechanicznych odkształceń. Bardzo korzystna jest również
możliwość stosowania bezprzewodowych markerów o małych
wymiarach i masach.
Niestety systemy nawigacji elektromagnetycznej posiadają dość
poważną wadę, a mianowicie cechuje je mała odporność na zakłócenia
w postaci zewnętrznych pól elektromagnetycznych generowanych
poprzez inne urządzenia elektryczne oraz zakłócenia generowane
poprzez materiały przewodzące i ferromagnetyczne znajdujące się
w przestrzeni pomiarowej systemu. Negatywną cechą systemu nawigacji
Aurora jest również bardzo ograniczona przestrzeń pomiarowa.
Wyszukiwarka
Podobne podstrony:
Cw nr 15
Biofizyka kontrolka do cw nr 15
spraw, CW 79, POLITECHNIKA WROCŁAWSKA
ćw 02 15
Cw II 15
spraw, CW 73
spraw, CW 73
cw 09 15
MS Sr 15 B 2 03 Sprawozdanie
ĆW 3 Psychiatria 15, studia, Psychiatria, Ćwiczenia
Ćw nr 15, Niepewność Pomiarowa, 11,13-11,23
Ćw nr 15. Dźwięk, WSB
spraw, CW 25, POLITECHNIKA WROCŁAWSKA
szt konw cw uzup 15, Politologia, Sztuka konwersacji
MS Sr 15 B 2 03 Sprawozdanie Zalacznik1
więcej podobnych podstron