
Roboty P
rzemysłowe
KRIM, WIMIR, AGH w Krakowie
1
NAPĘDY PNEUMATYCZNE MANIPULATORÓW
POZYCJONOWANE ZDERZAKOWO
ĆWICZENIE 8
Akademia Górniczo-Hutnicza w Krakowie
Roboty
Przemysłowe
Roboty P
rzemysłowe
KRIM, WIMIR, AGH w Krakowie
2
Pozycjonowane zderzakowo manipulatory pneumatyczne –
wykorzystanie cyklogramu pracy do planowania cyklu pracy
manipulatora –
układ kombinacyjny
4
2
14
12
∗
p
H
p
H
p
∗
1
2
4
12
14
Q
p
H
p
H
S
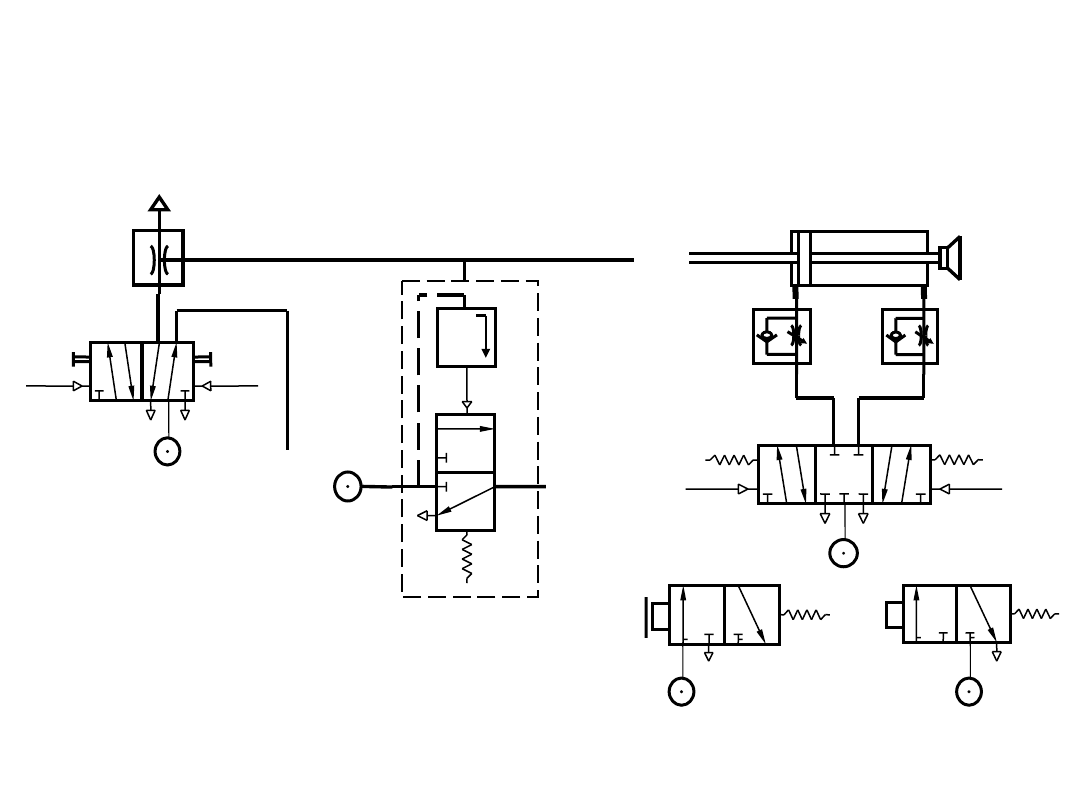
Moduł ruchu liniowego
Z chwytakiem podciśnieniowym
Roboty P
rzemysłowe
KRIM, WIMIR, AGH w Krakowie
3
Takt
4
⇒1
1
⇒2
2
⇒3
3
⇒4
Tłok
Pompa
L
P
S
L
P
Zał
Wył
1
0
1
0
1
0
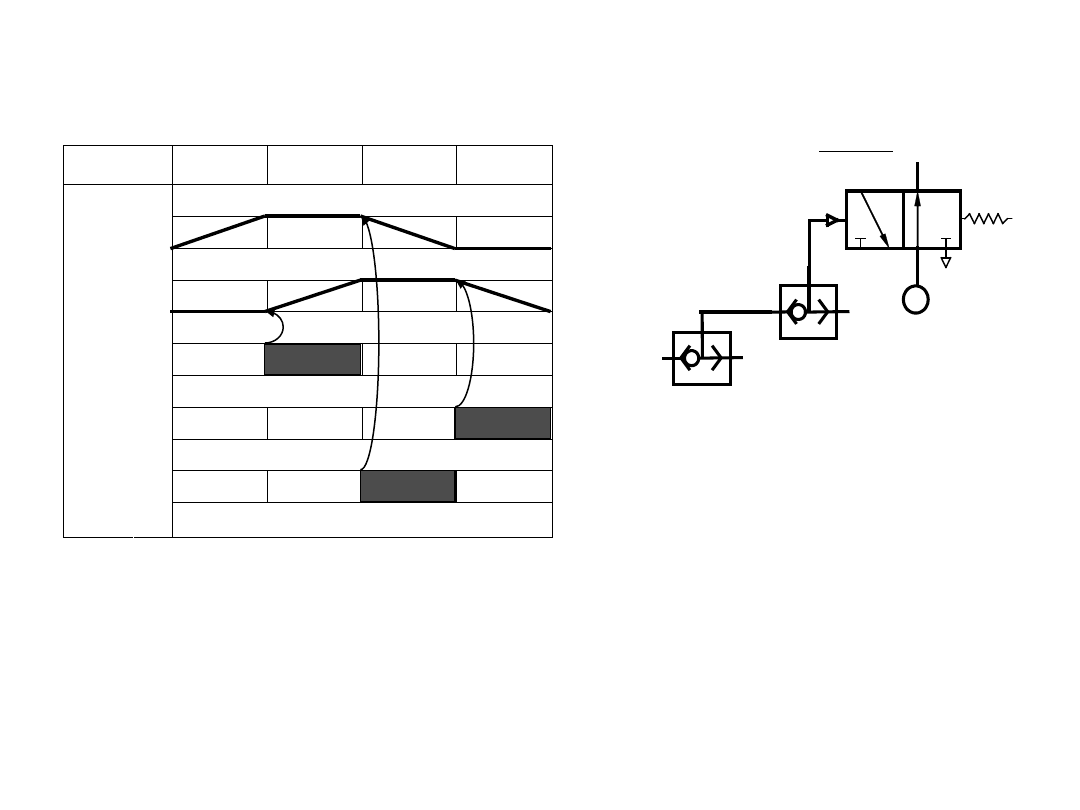
Cyklogram pracy
P
L
p
H
S
S
L
P
∪
∪
Roboty P
rzemysłowe
KRIM, WIMIR, AGH w Krakowie
4
∗
p
H
p
H
∗
2
1
2
1
p
H
4
2
14
12
p
1
2
4
12
14
Q
p
H
p
H
S
L
P
L
P
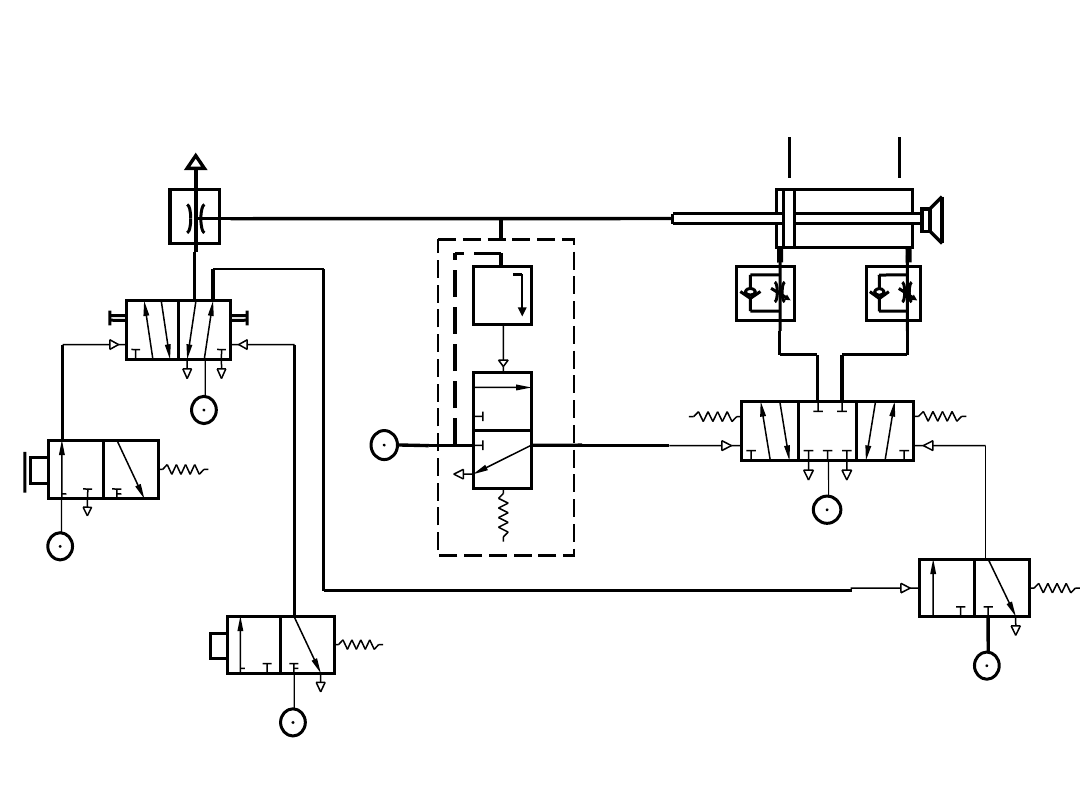
Schemat modułu ruchu liniowego z chwytakiem podciśnieniowym
Roboty P
rzemysłowe
KRIM, WIMIR, AGH w Krakowie
5
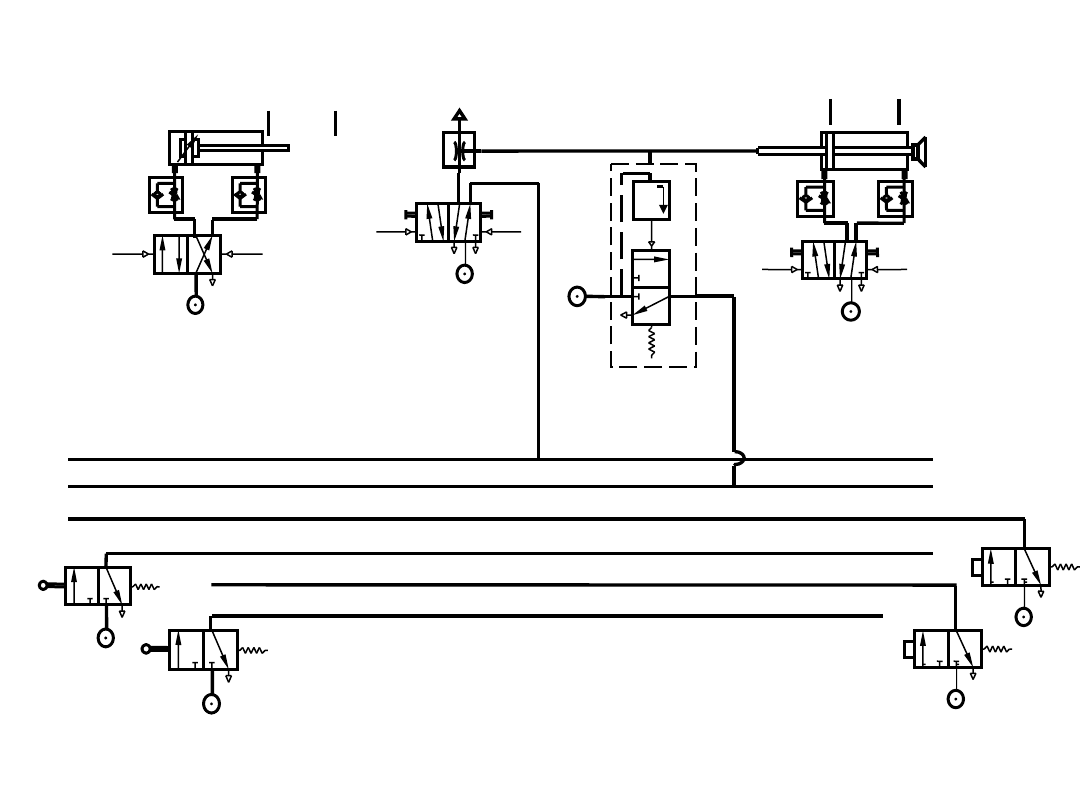
Zadanie do wykonania:
X
Y
A
B
p
L
P
p
H
P
p
1
2
4
12
14
Q
p
H
p
H
S
∗
p
H
G
G
D
1
2
4
12
14
p
H
L
∗
p
H
D
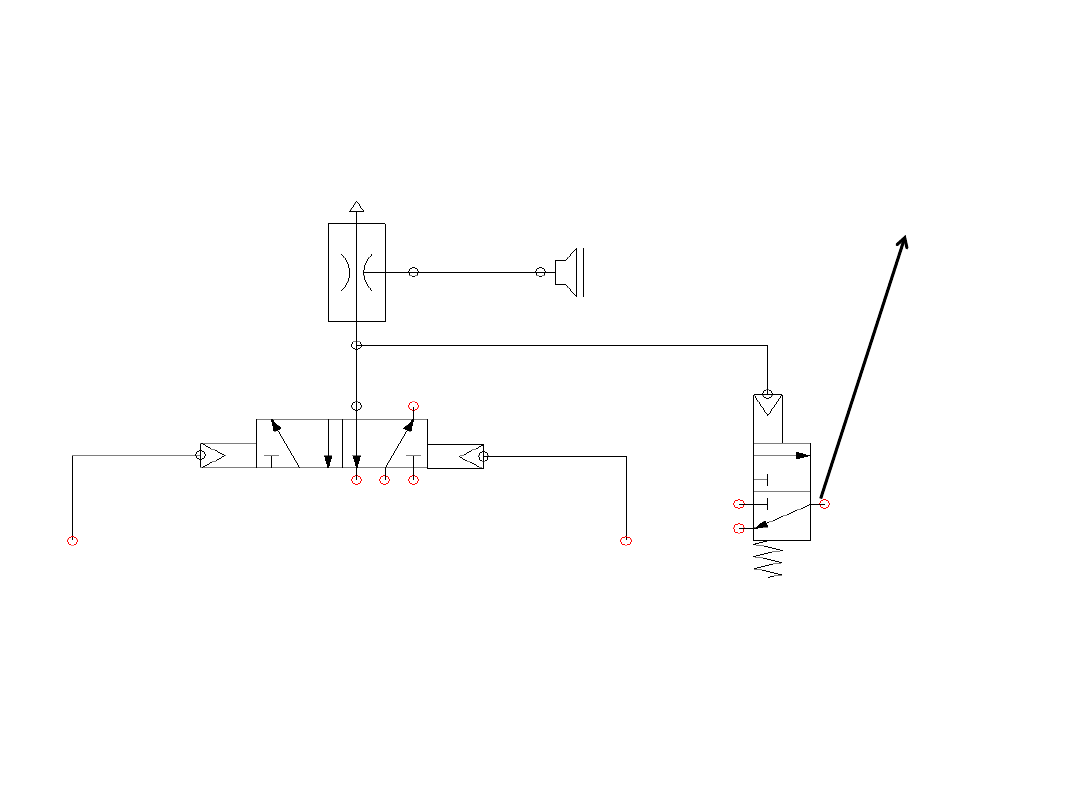
Sposób
podłączenia (podciśnieniowej) pompy Venturiego w Automation
Studio.
Sygnał „S”
Roboty P
rzemysłowe
KRIM, WIMIR, AGH w Krakowie
6
Document Outline
Wyszukiwarka
Podobne podstrony:
lab08 makra id 258846 Nieznany
Lab08 Sprawozdanie id 258847 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
Probiotyki antybiotyki id 66316 Nieznany
miedziowanie cz 2 id 113259 Nieznany
LTC1729 id 273494 Nieznany
D11B7AOver0400 id 130434 Nieznany
analiza ryzyka bio id 61320 Nieznany
pedagogika ogolna id 353595 Nieznany
Misc3 id 302777 Nieznany
cw med 5 id 122239 Nieznany
więcej podobnych podstron