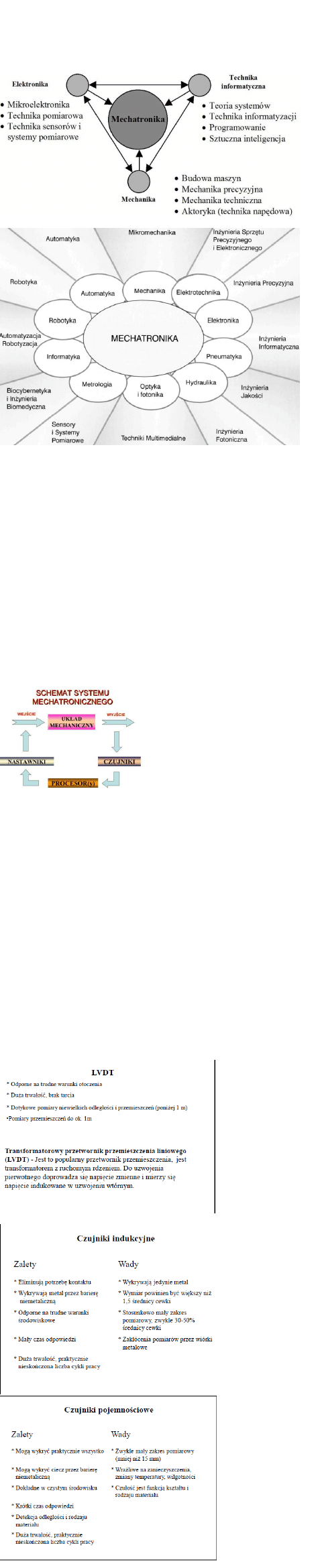
1.Mechatronika jest dziedziną interdyscyplinarną, łączącą w sposób
synergiczny wiedzę z klasycznej budowy maszyn, hydrauliki, pneumatyki,
elektrotechniki elektroniki, optyki i informatyki.
2. kluczowe zagadnienia mechatroniki i określ jej podstawowe elementy
3.Mechatronika systematycznie wykorzystuje nowe
konstrukcje półprzewodników przez:
zastępowanie konwencjonalnych urządzeń mechanicznych
tam, gdzie jest to mozliwe (kalkulatory, zegarki);
zastępowanie mechanicznych nośników funkcji nośnikami
elektronicznymi
(maszyny do szycia, aparaty fotograficzne, kopiarki, pojazdy);
dołączanie elektronicznych urządzeń sterowniczych do
maszyn konwencjonalnych
(obrabiarki sterowane numerycznie, roboty, elektroniczne
sterowanie silników).
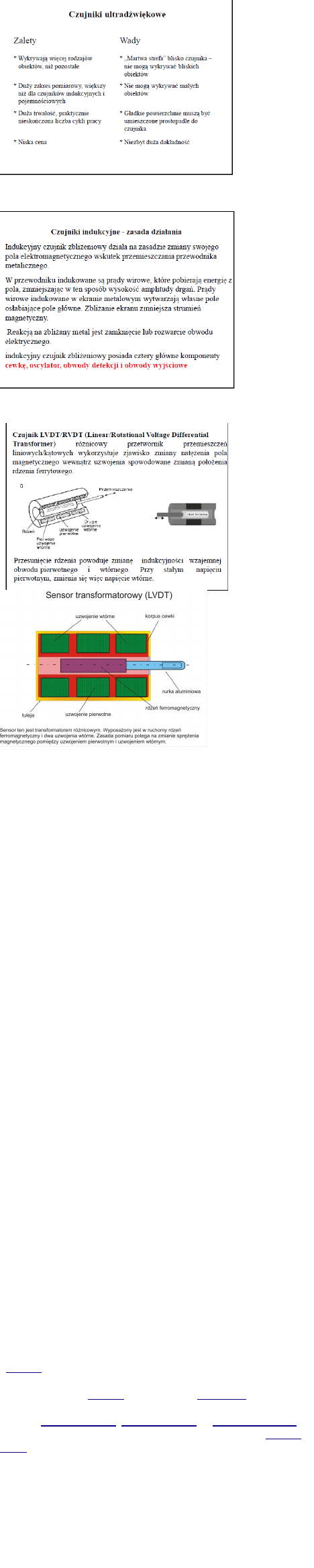
Architektura systemu mechatronicznego: System mechatroniczny jest to
zamknięty układ sterowania zbudowany z następujących jednostek
funkcjonalnych: obiektu podlegającego kontroli, moduł pomiarowy, układ
sterującego, modułu nastawczego. W klasycznym systemie elektro-
mechanicznym występuje wyraźny podział na bloki funkcjonalne: aktuatory,
obiekt mechaniczny, sensory i komputer sterujący. System mechatroniczny
jest zintegrowany na poziomie sprzętowym i programowym.
5.Czujnik przetwornik wielkości fizycznej (odleglos sila, temp,) na sygnal
elektryczny:
Klasyfikacja – potencjometryczne, pojemnosciowe, indukcyjne,
ultradzwiekowe, tensometryczne, piezoleketryczne, piezorezystywne
Klasyfikacja czujników ze wzgl
ędu na mierzoną wielkość:
-
położenia, odległości i kąta obrotu
- przyspieszenia
-
siły, ciśnienia i momentu obrotowego
-
przepływu
- temperatury
-
natężenia światła
Klasyfikacja czujników ze wzgl
ędu na źródło energii
sygnału pomiarowego:
- pasywne - energia potrzebna
do wytworzenia sygnału
wyjściowego jest czerpana ze zjawiska fizycznego (pomiar
temperatury z wykorzystaniem termopary)
- aktywne -
wymagają zewnętrznego źródła energii do
wytworzenia sygnału wyjściowego (pomiar naprężenia z
wykorzystaniem tensometru)
6.
7. czujniki indukcyjne wyjasnij zasadę działania
8. schematycznie trafo LVdt
9. do czego służy tensometr- służy do pomiaru naprężenia
10.
Do czego służy enkoder ? Czym się różni enkoder inkrementalny od
absolutnego.
Enkoder to urządzenie przetwarzające przesunięcie i pozycję kątową na
sygnał elektryczny. Enkodery powszechnie wykorzystuje się we wszelkiego
rodzaju maszynach i liniach produkcyjnych do precyzyjnego pomiaru
prędkości, przesunięcia, odległości czy przebytej drogi.
Różnice – Enkodery dzieli się ze względu na sposób pomiaru na
inkrementalne (zwane również przetwornikami obrotowo – impulsowymi) i
absolutne (przetworniki obrotowo – kodowe). Oba typy enkoderów różnią się
wytwarzanym na wyjściu sygnałem oraz możliwością pamiętania mierzonej
wielkości. Enkoder inkrementalny generuje na wyjściu sygnał impulsowy.
Każdemu przesunięciu kątowemu przyporządkowana jest konkretna liczba
impulsów wyj-ściowych. Parametr enkodera zwany rozdzielczością decyduje
ile impulsów wyjściowych odpowiada danemu przesunięciu. Im większa
rozdzielczość enkodera tym mniejsze przesunięcia kątowe można mierzyć a
więc również tym większa dokładność pomiaru. Enkoder inkrementalny nie
pamięta aktualnego położenia. Generuje jedynie impulsy, które zliczane
przez wchodzący w skład układu sterowania maszyną licznik dają informację
o wykonanym przez układ wykonawczy przesunięciu lub aktualnym
położeniu.Cechą charakterystyczną enkodera absolutnego jest zdolność do
pamię-tania aktualnej pozycji nawet po wy-łączeniu napięcia zasilania.
Enkoder absolutny generuje na wyjściu sygnał kodowy. Każdemu kątowi
obrotu odpowiada konkretna wartość kodowa na wyjściu. Enkodery
absolutne dzieli się na jednoobrotowe i wieloobrotowe. Jednoobrotowe
rozróżniają pozycje tylko w ramach jednego obrotu a więc efektem obrotu
wału takiego enkodera dokładnie o kąt 360° będzie taki sam sygnał na
wyjściu. Enkodery wieloobrotowe generują sygnał wyjściowy informujący
zarówno o pozycji kątowej jak również i o liczbie wykonanych obrotów
11. Wyjaśnij pojęcie aktuator –
Nastawnikiem (aktuatorem - ang. actuator)
nazywa się urządzenie, które
umożliwia wykonanie pewnej pracy poprzez
przetworzenie sygnału sterującego w postaci wielkości elektrycznej na proporcjonalną
wielkość nieelektryczną(przemieszczenie, temperatura, siła).
12. Omów wybrany aktuator ruchu obrotowego np silnik dc,
ac, układy mosfet, silniki hydrauliczne,
13. Omów wybrany aktuator przemieszczenia liniowego –
14. Wyjaśnij pojęcie materiały inteligentne i podaj przykłady
zmieniający swoje własności w kontrolowany sposób w
reakcji na bodziec otoczenia. Materiał taki łączy w ramach jednej
struktury własności
. Materiały
tego typu konstruuje się zwykle wykorzystując
zjawiska
lub
, a
15.
Omów zjawisko piezoelektryczne, podaj przykłady
zastosowań
zastosowanie w aktuatorach piezoelektrycznych, głosnikach, mikrofonach
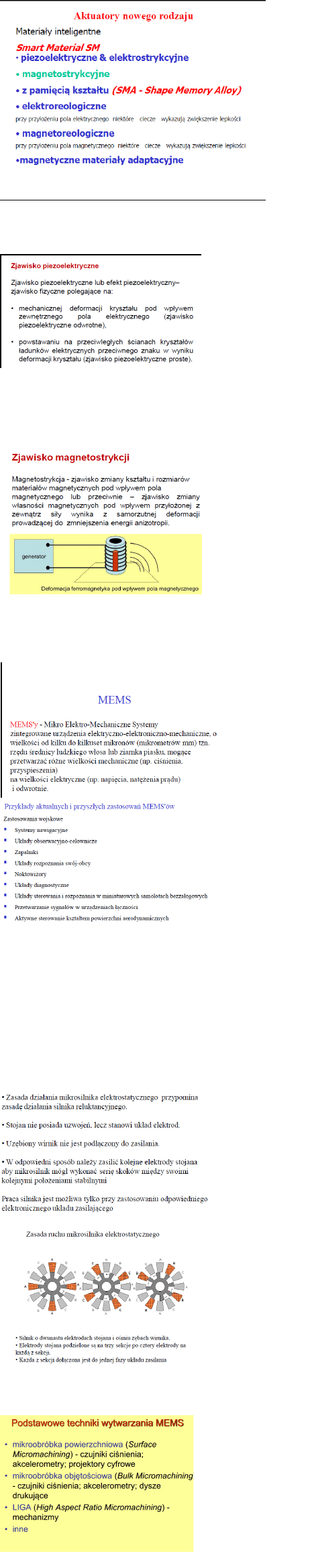
16. Omów zjawisko magnetostrykcyjne, podaj przykłady
zastosowań
zastosowanie – generatory ultradzwięków.
17. Pojęcia MEMS, MEOMS, μTAS.
MIcroTAS -
to skrót od micro total analysis systems, moze byc uzywany do
okreslania/opisywania/nazywania\
MEOMS-
mikroskopijne systemy optyczne elektryczne i mechaniczne
18. Przykłady urządzeń i zastosowań urządzeń typu MEMS –
zastosowania wyżej
Przykłady – akcelerometry, zbiorniki substancji, rzutniki
19. Przedstaw zasadę działania mikrosilnika elektrostatycznego
20. W jaki sposób wytwarza się mikromechanizmy krzemowe?
Wyszukiwarka
Podobne podstrony:
Mechatronika4
Mechatronika6
Wykład Mechatronika 01 05
DO TEL! 5= Genetyka nadci nieni Nieznany
MTR 2009 Wstep do mechatr cz 3 (2)
Mechatronik Praktyczny 2013 styczen 1
J 249 PODS TEL
MO - sprawozdanie 2(1), Politechnika Poznańska, Mechatronika, SEMESTR I, Odlewnictwo
Zagadnienia egzaminacyjne z mechatroniki Irok, Mechatronika, Wprowadzenie do mechatroniiki
mechatronika - pytania, PW, PW-semestr IV, MECTR
Lista firm, elektronika, mechatronika i niewiadomo co
Projekt robota mobilnego szukającego wyjścia z labiryntu, MECHATRONIKA
odpowiedzi -zarządzanie, Studia - Mechatronika PWR, Podstawy zarządzania - wykład (Teresa Maszczak)
Tel all, Word
Rodzaj i sposób obróbki, Mechatronika AGH IMIR, semestr 8, ZSW
ŚCIĄGA NA TEL
Projekt Mechatronika?nczarek Brol
EZ 08 mechatronik
więcej podobnych podstron