
Laboratorium Podstaw Elektrotechniki i Elektroniki
dla studentów WIP
Temat:
BADANIE APARATURY ŁĄCZENIOWEJ
materiały pomocnicze do laboratorium elektroniki, elektrotechniki i energoelektroniki
wyłącznie do użytku wewnętrznego przez studentów WIP PW
bez prawa kopiowania i publikowania
Zakład Trakcji Elektrycznej
IME PW 2003
1
1. Zestyki elektryczne
Określenia i podział zestyków
Dowolne połączenie w torze prądowym nazywamy zestykiem. Część zestyku należącą do
jednego odcinka toru prądowego nazywamy stykiem.
Zestyki można podzielić z uwagi na sposób pracy, kształt powierzchni styczności oraz sposób
wykonania (budowę).
Ze względu na sposób pracy wyróżniamy zestyki:
— nierozłączne nieruchome, tj. takie, w których miejsca styczności obu styków nie zmieniają
wzajemnego położenia w czasie pracy; zapewnione jest to np. przez skręcenie śrubami,
zespawanie lub sprasowanie;
— nierozłączne ruchome (ślizgowe), tj. takie, w których miejsca styczności obu styków mogą
zmieniać wzajemne położenie bez ograniczenia wartości przewodzonego prądu;
— rozłączne bezłukowe, tj. takie, które przewodzą prąd w stanie zamknięcia oraz mogą być
rozłączane w czasie kiedy prąd nie płynie, a więc kiedy nie występuje łuk elektryczny;
— rozłączne łukowe, tj. takie, które przewodzą prąd w stanie zamknięcia oraz mogą być
rozłączane w czasie przepływu prądu, a więc kiedy występuje łuk elektryczny.
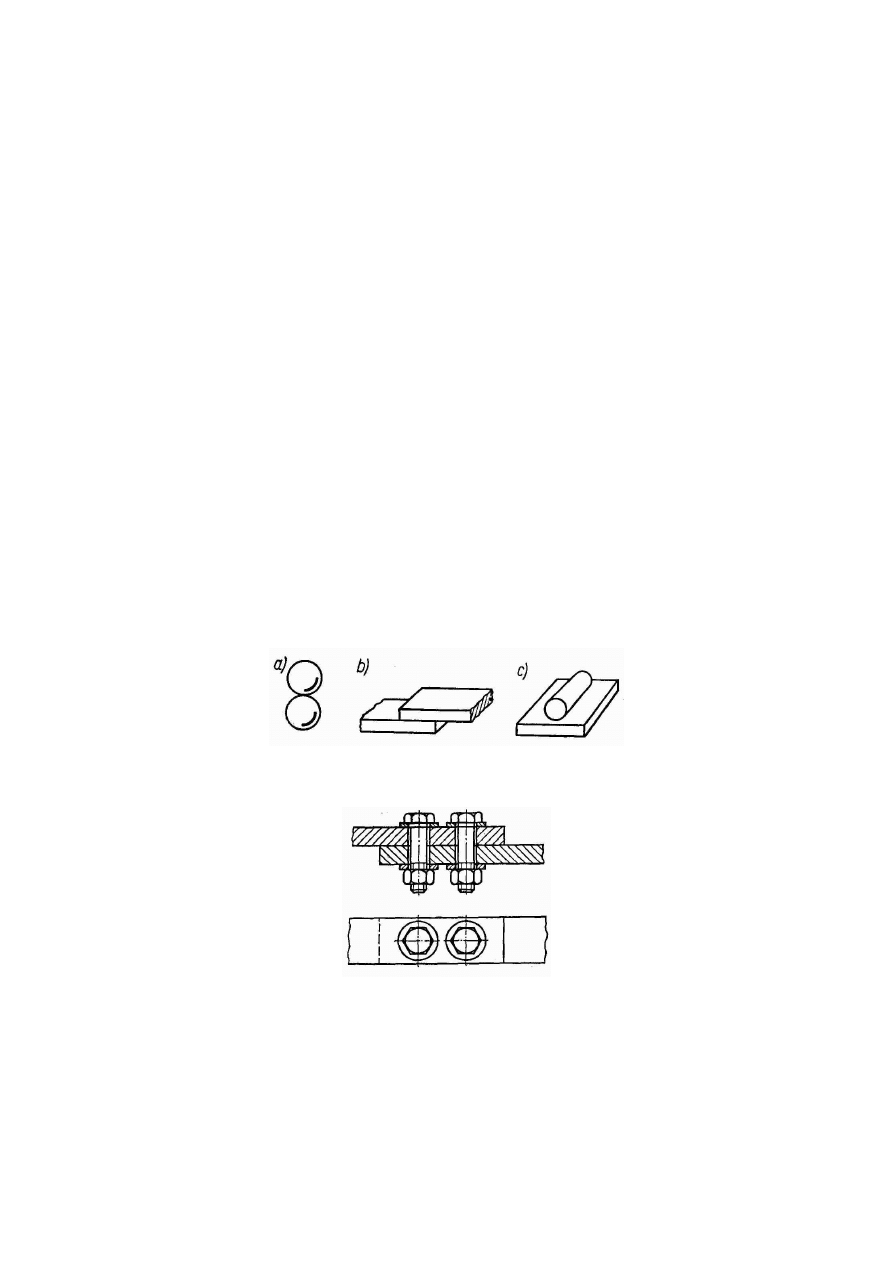
W zależności od kształtu powierzchni styczności rozróżniamy zestyki:
— jednopunktowe, w przypadku styczności np. dwóch kul, kuli z płaszczyzną lub
skrzyżowanych dwóch walców;
— wielopunktowe, w przypadku styczności dwu płaszczyzn;
— liniowe, w przypadku styczności walca z płaszczyzną. Przykłady wymienionych rodzajów
styczności podano na rys.1.1. Wobec znacznej liczby możliwych sposobów wykonania
(konstrukcji) zestyków podano przykładowo jedynie najczęściej stosowane.
Rys.1.1 Przykłady rodzajów styczności : a) punktowa; b) wielopunktowa; c) liniowa
Rys.1.2. Zestyk nierozłączny nieruchomy
Na rys.1.2 pokazano przykład zestyku nierozłącznego, nieruchomego, skręconego śrubami.
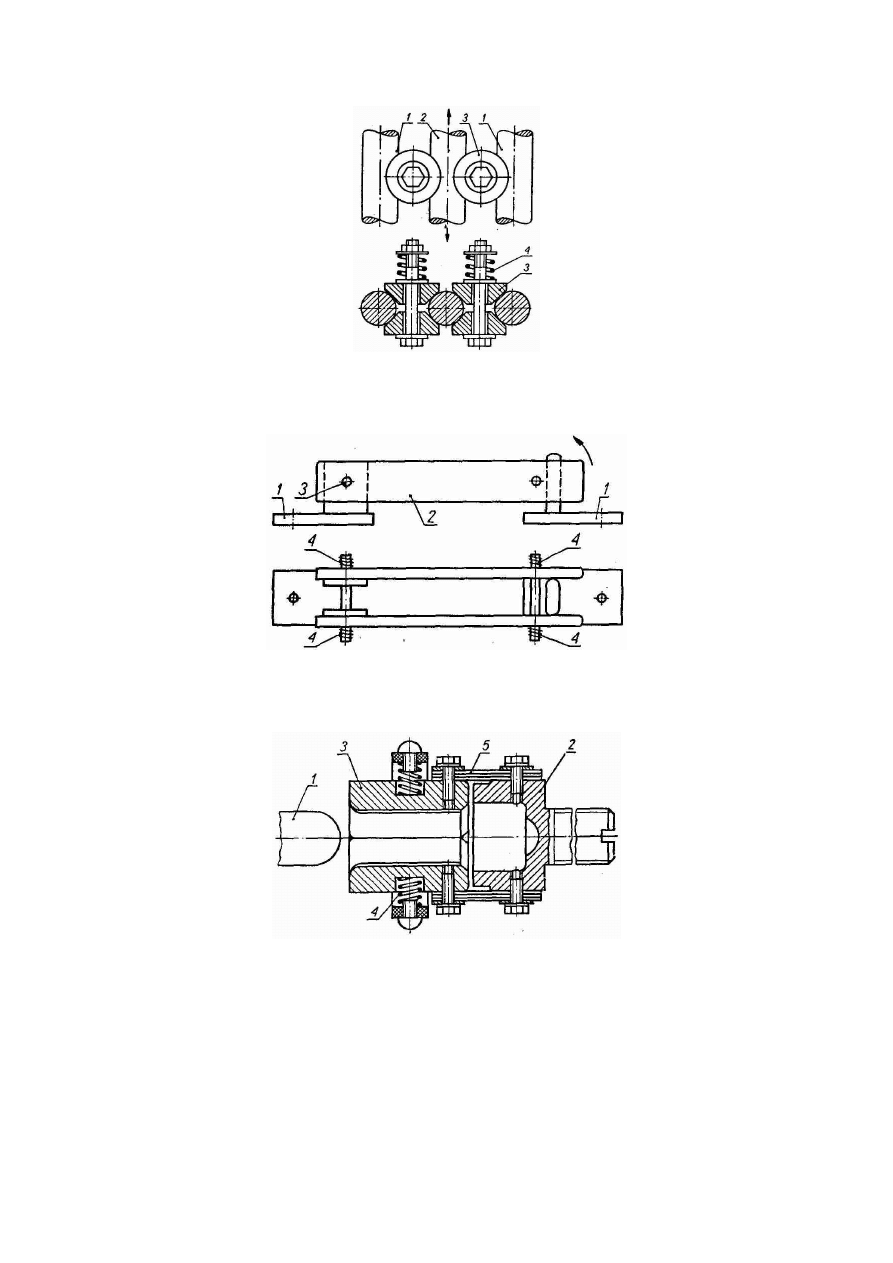
Przykład zestyku nierozłącznego ruchomego przedstawia rys.1.3. Jako zestyk rozłączny
bezłukowy stosowany jest najczęściej pokazany na rys.4 zestyk tzw. szczękowy. Na rys.1.5
podano przykład zestyku rozłącznego łukowego, zwanego gniazdowym, który składa się z
nieruchomego gniazda i ruchomego styku walcowego, zwanego wtykiem.
2
Rys.1.3. Zestyk nierozłączny ruchomy (bezłukowy)
J—części nieruchome toru prądowego, 2— część ruchoma toru prądowego (kierunki ruchu
oznaczono strzałkami), 3 — rolki prowadzące, 4—sprężyny dociskowe
Rys.1.4. Zestyk rozłączny bezłukowy
l—część toru prądowego nieruchoma, 2— część toru prądowego ruchoma (obrotowa), 3—oś
obrotu, 4—sprężyny dociskowe
Rys.1.5. Zestyk rozłączny łukowy
l—styk ruchomy (wtyk), 2—styk stały (gniazdo), 3—styczki („lamelki") styku stałego, 4—
sprężyny dociskowe, 5—elastyczne połączenie przewodzące
Wymagania podstawowe
Wymagania stawiane zestykom zależą od rodzaju aparatu lub urządzenia elektrycznego oraz
warunków eksploatacji.
Podczas pracy zestyku występują w obszarze styczności złożone zjawiska fizyczne i
chemiczne jak:
— zjawiska związane z przenoszeniem ładunku elektrycznego;

3
— zjawiska związane z korozją powierzchni styczności (np. utlenianie):
— erozja elektryczna, związana z obecnością wyładowania elektrycznego w obszarze styków;
— erozja mechaniczna, związana z deformacją plastyczną;
— wpływy środowiskowe, związane z temperaturą, wilgotnością i zanieczyszczeniami,
głównie przemysłowymi.
Zjawiska te są przyczyną znacznej zawodności pracy zestyków. Należy mieć na uwadze, że
nawet w prostym urządzeniu elektrycznym występuje co najmniej kilka zestyków, a w
złożonych układach sterowania może ich być już kilkaset tysięcy.
Warunki, które muszą spełniać zestyki, można podzielić na elektryczne, mechaniczne,
środowiskowe, niezawodnościowe.
Do warunków elektrycznych zaliczamy:
— małe straty mocy w zestyku;
— małą i stabilną rezystancję przejścia, zwykle rzędu kilkunastu do kilkuset ohmów, przy
zmianach w czasie tej wartości rzędu 20—30%;
— odporność na erozję od łuku elektrycznego zestyków rozłącznych łukowych (uzyskiwaną
przez taką konstrukcję, aby łuk palił się między miejscami wykonanymi z materiału trudno
topliwego);
— odporność dynamiczną i cieplną na działanie krótkotrwałych prądów przeciążeniowych, a
zwłaszcza prądów zwarciowych;
— brak lub możliwie mała różnica potencjałów elektrochemicznych w zestyku;
— odporność na działanie prądów ciągłych, a w szczególności niewystępowanie temperatur
prowadzących do przegrzania otaczającej zestyk izolacji oraz powodujących utratę
sprężystości sprężyn dociskowych; jako dopuszczalne przyjmuje się temperatury rzędu 100—
150 °C.
Ponadto zestyki układów elektronicznych oraz obwodów pomiarowych i niektórych
sygnalizacyjnych:
— nie powinny wprowadzać siły termoelektrycznej, zmieniającej sygnał roboczy obwodu;
— nie powinny wprowadzać dodatkowych napięć do obwodu od sprzężeń magnetycznych i
pojemnościowych, wynikających z niewłaściwego ekranowania;
— w obwodach dużej częstotliwości powinny umożliwiać pracę przy częstotliwościach rzędu
megaherców i większych.
Warunki mechaniczne powinny zapewniać poprawny stan styków przy pracy urządzenia
rzędu 10 do 25 i więcej lat. Dla urządzeń elektronicznych przyjmuje się krótszy okres
eksploatacji — 12 do 15 lat, przy czasie efektywnej pracy urządzenia do 10 tysięcy godzin.
Wymienione warunki co do czasu pracy wymagają:
— przyjęcia możliwie małych docisków, spełniających jednakże wymagania elektryczne;
należy mieć na uwadze, że zwiększenie docisku zmniejsza niezawodność pracy zestyku przez
zwiększenie możliwości uszkodzeń sprężyn i odkształcenia powierzchni styczności;
— możliwie małych i stabilnych współczynników tarcia; zmniejszenie tarcia zmniejsza
naprężenia w układzie stykowym przy jego otwieraniu lub zamykaniu;
— dużej odporności na erozję mechaniczną, występującą przy włączaniu lub wyłączaniu
(zamykaniu lub otwieraniu zestyku); należy mieć na uwadze, że dla aparatów elektrycznych
wysokiego napięcia wymagana jest trwałość mechaniczna równa 2000 przestawień (włączeń i
wyłączeń), dla aparatów niskiego napięcia wartość przestawień dochodzi, zależnie od
przeznaczenia aparatów, do setek tysięcy, a dla przekaźników nawet do milionów. Dla
zestyków urządzeń elektronicznych wymagana liczba włączeń i wyłączeń określana jest,
zależnie od przeznaczenia, jako równa 300, 500, 1000 i 10000;
— odporności na drgania i udary; częstotliwość drgań własnych zestyku powinna być
znacznie większa niż drgań występujących w pracy urządzenia; udary, określane krotnością
ich przyspieszenia w stosunku do przyspieszenia ziemskiego g, nie powinny powodować
4
uszkodzeń mechanicznych i przypadkowych wyłączeń lub włączeń; można podać
orientacyjnie, że w transporcie morskim drgania mogą być rzędu do 150 Hz i przyspieszenia
do 5 g, w transporcie lotniczym — drgania do 1500 Hz i przyspieszenia 5—10 g, w technice
kosmicznej — drgania do 2000 Hz i przyspieszenia do 50 g; sprzęt domowy stacjonarny
może mieć wibracje rzędu 50 Hz, natomiast przenośny—do 2000 Hz.
Przy eksploatacji zestyków należy mieć na uwadze warunki środowiskowe, jak:
— temperaturę, przy czym w warunkach polskich zmienia się ona od —30 do +40°C—dla
urządzeń napowietrznych i od—5 do +40°C - dla urządzeń wnętrzowych;
— wilgotność, która w urządzeniach wnętrzowych, w klimacie umiarkowanym, w
temperaturze powyżej +20 °C dochodzi do 80%;
— zawartość zanieczyszczeń przemysłowych, głównie związków z siarką jak S0
2
;
— obecność promieni nadfioletowych, głównie w obszarach nadmorskich lub
wysokogórskich.
Wymienione czynniki środowiskowe nie występują jednocześnie, jednakże z uwagi na
tworzenie wielkooporowych warstw nalotowych na stykach (również zamkniętych)
szczególnie niekorzystne jest jednoczesne występowanie podwyższonej temperatury,
wilgotności oraz związków z siarką.
Niezawodność pracy zestyku określona jest odpornością na działanie wszystkich
wymienionych wyżej czynników elektrycznych, mechanicznych i środowiskowych.
Rezystancja przejścia zestyku
Podstawowym parametrem elektrycznym zestyku jest jego rezystancja przejścia. Od
rezystancji przejścia zależy nagrzewanie się zestyku, a więc i dopuszczalny prąd
przepływający przez zestyk. W przypadku zestyku istnieje trudność jednoznacznego
określenia długości odcinka toru prądowego. Orientacyjnie można przyjąć, że jest ona rzędu
kilku do kilkuset
µm. Trudność ta nie występuje jednakże praktycznie, ponieważ rezystancja
przejścia zestyku jest o kilka rzędów większa od rezystancji materiału odcinka toru
prądowego. Dlatego pomierzona rezystancja odcinka toru prądowego z zestykiem w
odległości nawet kilku cm od miejsca połączenia (styczności) jest praktycznie równa
rezystancji przejścia.
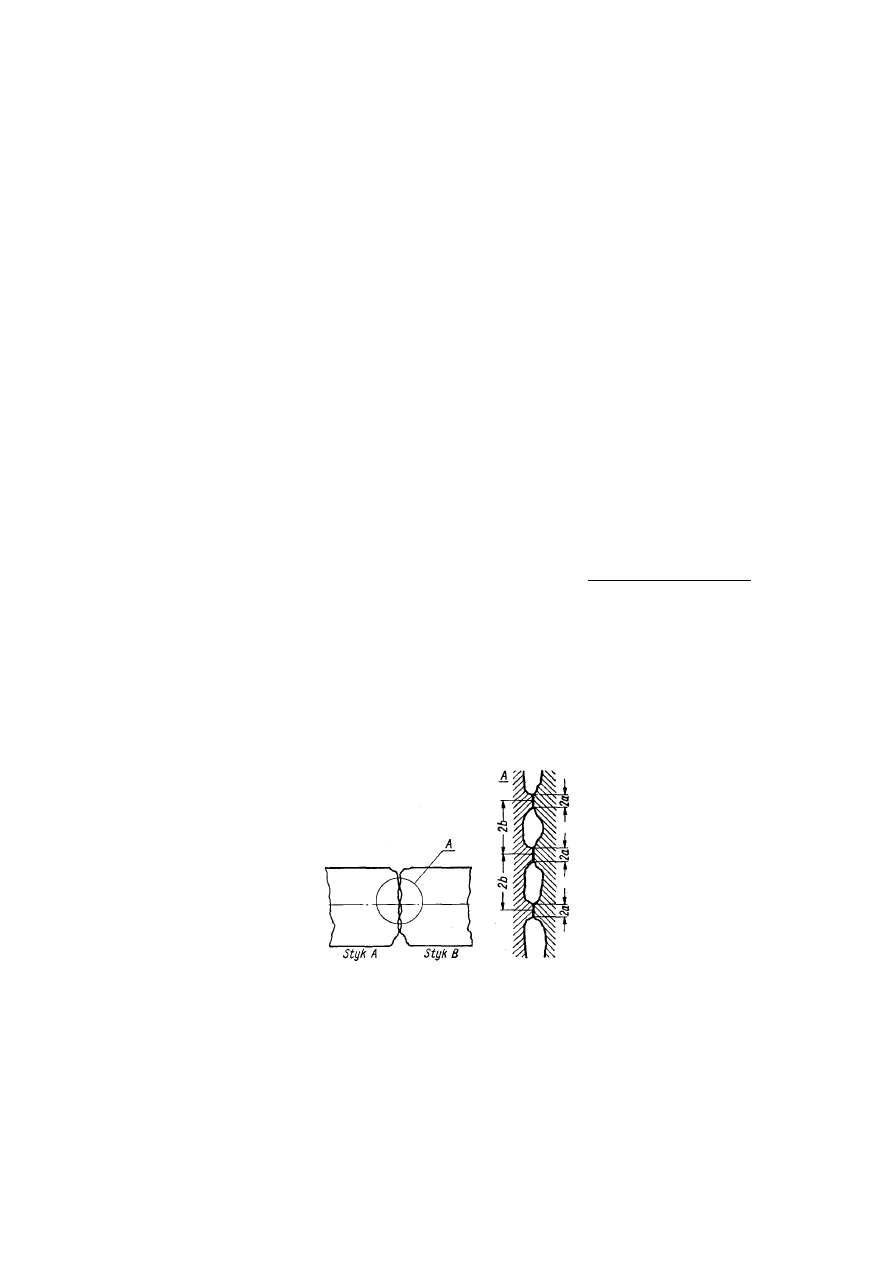
Rys.1.6. Powierzchnia styczności z pokazanymi mikronierównościami
Na rezystancję przejścia zestyku mają wpływ następujące czynniki:
— kształt miejsca styczności, charakteryzujący tzw. rezystancję kształtu;
— wpływ warstwy nalotowej, w skład której wchodzi warstwa gazu adsorbowanego na
powierzchni styczności oraz warstwa korozyjna związków chemicznych materiału styku z
gazem otaczającego środowiska (np. warstwa tlenków, siarczków itp.).
5
Rezystancja kształtu polega na tym, że dwa styki stykają się w rzeczywistości na
mikronierównościach, pokazanych przykładowo na rys.1.6. Obecność tych mikronierówności
jest powodem występowania rezystancji kształtu.
2. Wyłączanie prądu stałego
Z chwilą rozdziału styków łącznika pojawia się w obwodzie łuk elektryczny. Zależnie od
wartości prądu i intensywności gaszenia łuk ten ma określoną charakterystykę napięciowo-
prądową, z której przy znanym przebiegu prądu można wyznaczyć charakterystykę
napięciowo-czasową.
Gaszenie łuku wymaga sprowadzenia prądu do wartości zerowej i niedopuszczenia do
ponownego zapłonu na przerwie stykowej.
Podczas wyłączania prądu stałego uzyskuje się to przez odpowiednie napięcie łuku. Przy
prądzie przemiennym występują naturalne przejścia przez zero, co ułatwia gaszenie.
Z powyższego wynika, że proces wyłączania w wymienionych przypadkach będzie różny. W
obu przypadkach nie powinny występować po wyłączeniu zapłony na stykach łącznika,
wywołane napięciem obwodu, powodujące dalszy przepływ prądu.
Elektryczny łuk łączeniowy
Prąd łuku może być wyznaczony z równania:
l
u
dt
di
L
Ri
E
+
+
=
(2.1)
w którym: R—rezystancja zastępcza obwodu; L—indukcyjność zastępcza obwodu;
u
l
—napięcie łuku, zależne od prądu,
)
(i
f
u
l
=
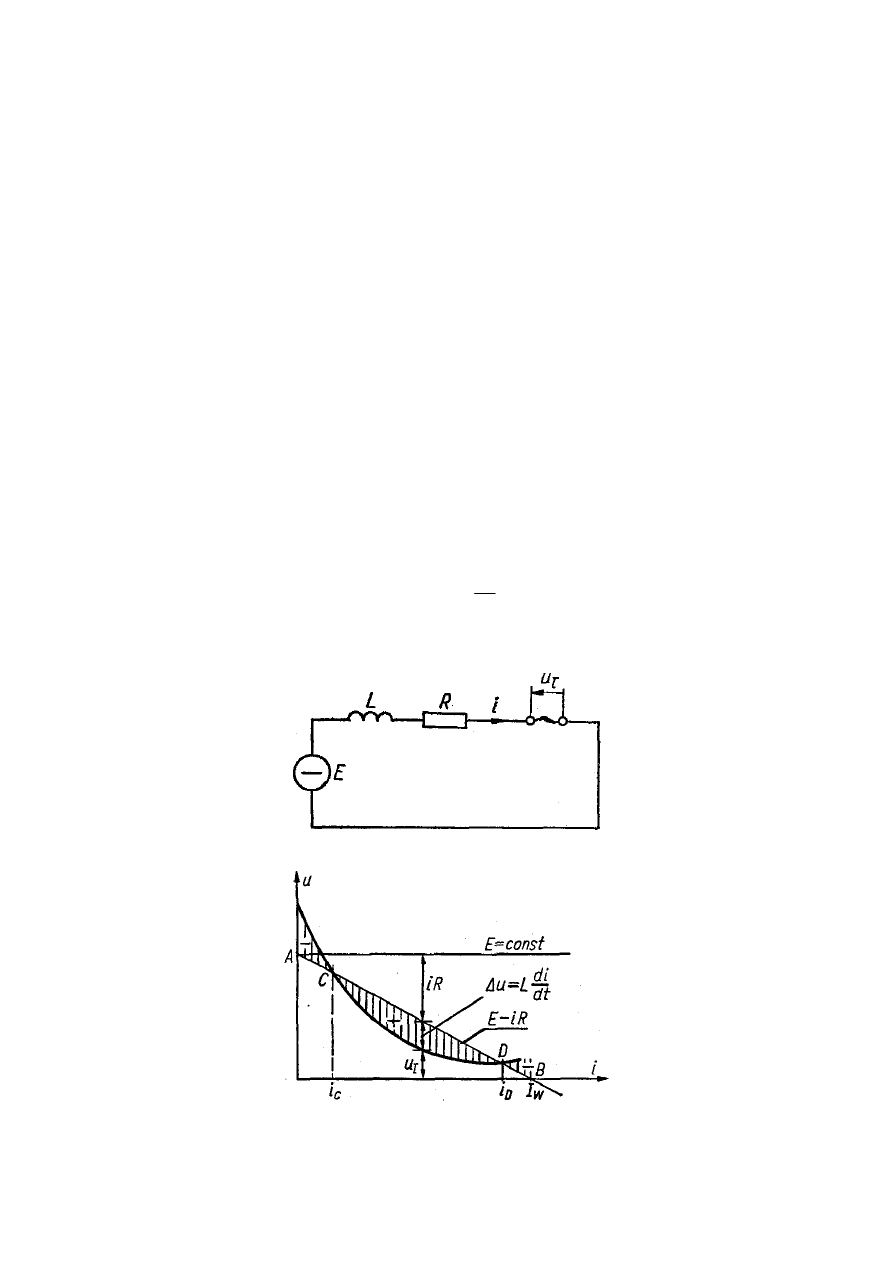
Rys.2.1 Schemat zastępczy obwodu prądu stałego z łukiem elektrycznym
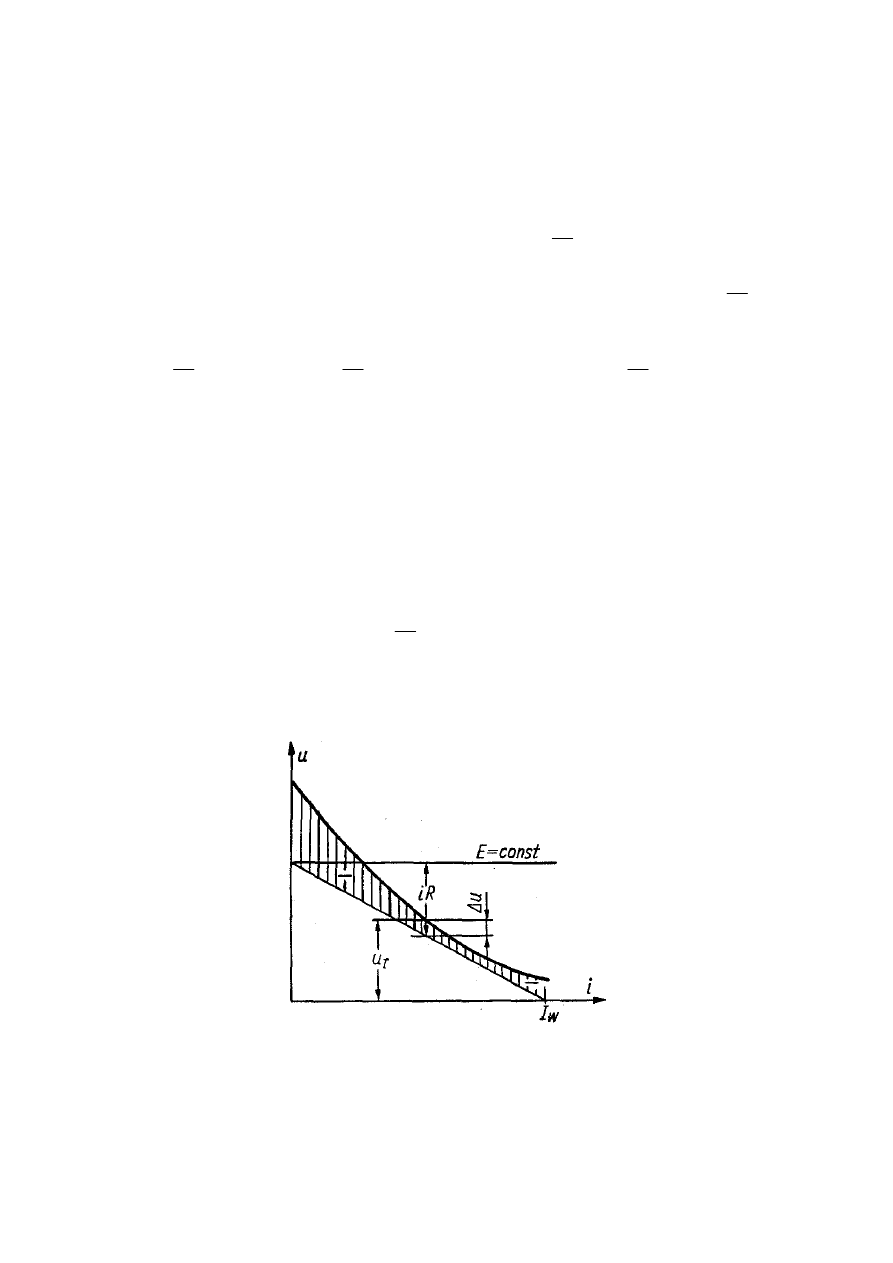
Rys. 2.2 Charakterystyka napięciowo-prądowa łuku i charakterystyka zewnętrz na obwodu
prądu stałego
6
Równanie to przedstawiono graficznie na rys.2.2. Prosta AB przedstawia tzw. charakterystykę
zewnętrzną, wyznaczającą zależność prądu w stanie ustalonym od napięcia w obwodzie o
stałej rezystancji, bez łuku elektrycznego. Na rysunku tym podano również charakterystykę
łuku. Jeżeli charakterystyka łuku przecina się z charakterystyką zewnętrzną, to punkty
przecięcia C i D odpowiadają ustalonym warunkom palenia się łuku przy prądzie
odpowiednio i
c
lub i
D
), ponieważ w tych punktach wartość
dt
di
L
(stąd i = const).
Na rysunku oznaczono obszary, w których spadek napięcia na indukcyjności
dt
di
L
jest
większy od zera (+) lub mniejszy od zera (-).
Jeżeli
dt
di
L
> O, to pochodna
dt
di
> O i prąd wzrasta. Jeżeli zaś
dt
di
L
< O, to pochodna
di/dt< O, a więc prąd maleje.
Przy zmianach prądu w otoczeniu punktu D prąd będzie zwiększał się lub zmniejszał, dążąc
do uzyskania stanu równowagi w punkcie D, w którym łuk pali się stabilnie. Punkt pracy D
nazywamy punktem równowagi stabilnej.
Przy wzroście prądu w otoczeniu punktu C z uwagi na znak pochodnej di/dt wzrośnie on do
wartości odpowiadającej punktowi D. Przy zmniejszeniu prądu w otoczeniu punktu C,
pochodna di/dt< O, tzn. prąd będzie malał do zera. Punkt pracy C nazywamy punktem
równowagi niestabilnej.
Z powyższych rozważań wynika ważny wniosek, że dla zgaszenia łuku prądu stałego musi
być spełnione:
0
<
−
−
=
l
u
Ri
E
dt
di
L
(2.2)
Warunek ten będzie spełniony w całym zakresie zmian prądu, jeżeli charakterystyka łuku nie
przetnie się z charakterystyką zewnętrzną, co pokazano na rys. 2.3.
Rys.2.3 Podniesienie charakterystyki napięciowo-prądowej łuku w stosunku do
charakterystyki zewnętrznej obwodu
Odpowiednie podniesienie charakterystyki łuku uzyskać można przez zwiększenie jego
długości lub zwiększenie gradientu.
7
W praktycznych rozwiązaniach konstrukcyjnych stosuje sią wydłużenie łuku na rożkach,
bardzo często z wydmuchem magnetycznym. W komorach wąsko-szczelinowych
wykorzystywany jest ponadto wpływ materiału komory na gradient łuku.
Przy wyłączaniu prądu stałego mogą powstać niebezpieczne przepięcia, zależne od stromości
wyłączanego prądu.
Wyrażenie
dt
di
L
określa spadek napięcia na indukcyjności w czasie zmian prądu. Przy
pominięciu spadku napięcia na rezystancji (co jest praktycznie dopuszczalne, zwłaszcza dla
końcowej fazy gaszenia) napięcie na łuku jest równe napięciu na indukcyjności,
zwiększonemu o napięcie źródła.
Występujące w łuku przepięcie zależy zatem od wartości indukcyjności w obwodzie jak i
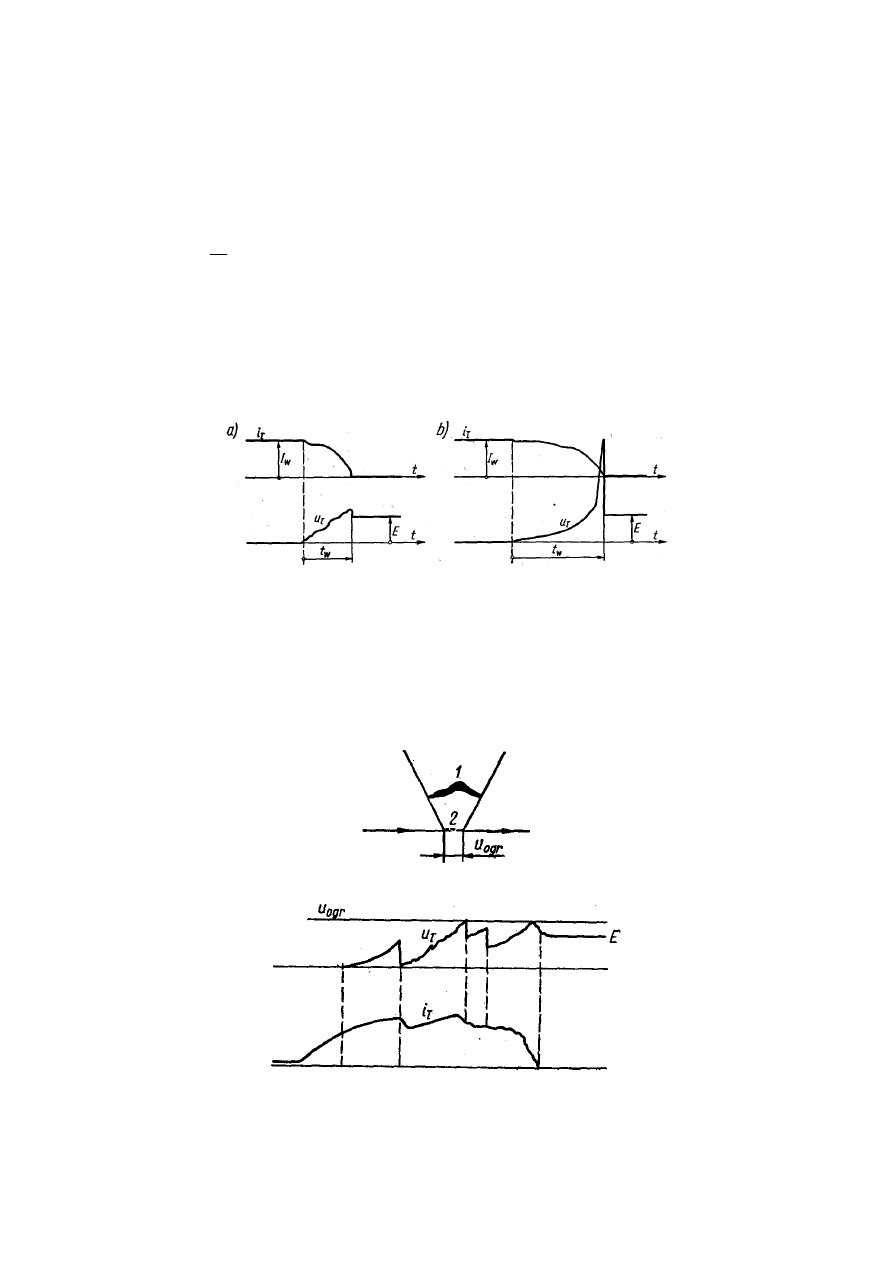
szybkości zmian prądu. Na rys. 2.4 podano przykładowo przebiegi prądów i napięć przy
wyłączaniu w obwodach o różnej indukcyjności.
Rys.2.4 Przykłady występowania przepięć przy wyłączaniu obwodów o różnej indukcyjności:
a) bliskiej zeru: b) dużej
Przy znacznym podwyższeniu napięcia łuku mogą w obwodzie wystąpić niebezpieczne dla
izolacji przepięcia. Dla ograniczenia tych przepięć stosuje się odpowiednie ukształtowanie
styków. Korzystny jest tu układ rożkowy, pokazany schematycznie na rys. 2.5. Jeżeli napięcie
łuku przekroczy wytrzymałość przerwy, to nastąpi zapłon łuku na tej przerwie i ograniczenie
przepięcia. Oscylogram wyłączania z zapłonami pokazano na rys. 2.6.
Rys.2.5 Schemat układu rożkowego styków w obwodach prądu stałego: l - łuk, 2 - przerwa
Rys.2.6. Oscylogram wyłączania z zapłonami ograniczającymi przepięcia
8
3. Technika gaszenia łuku elektrycznego
Łuk łączeniowy charakteryzuje się znaczną mocą cieplną. Ograniczenie jej wpływu na
zużycie styków, i komór gaszeniowych oraz czynnika chłodzącego jest możliwe głównie
przez ograniczenie czasu palenia się łuku.
W praktyce dąży się, aby czas występowania łuku przy wyłączaniu prądu przemiennego
zwarciowego zawierał się w granicach 10 - 20 ms, a przy wyłączaniu obciążeń nie
przekraczał 100 ms.
Podobnie przy prądzie stałym czasy łukowe są krótkie i wynoszą zależnie od prądu
wyłączeniowego od kilkudziesięciu do kilkuset ms.
Wymagane tak szybkie zgaszenie łuku pociąga za sobą konieczność ustalenia
najwłaściwszego sposobu odbioru energii, co jest realizowane przez stosowanie różnych
technik gaszeniowych omówionych niżej.
Gaszenie łuku swobodnego w powietrzu atmosferycznym
Swobodny łuk elektryczny może występować w prostych łącznikach elektrycznych bez
komór gaszeniowych lub przy przebiciu izolacji powietrznej. Gaszenie łuku swobodnego jest
uzależnione od jego chłodzenia. Dla stworzenia warunków takiego odbioru mocy z łuku,
ażeby mógł on być zgaszony, konieczne jest jego rozciągnięcie na określoną długość, zwaną
długością krytyczną.
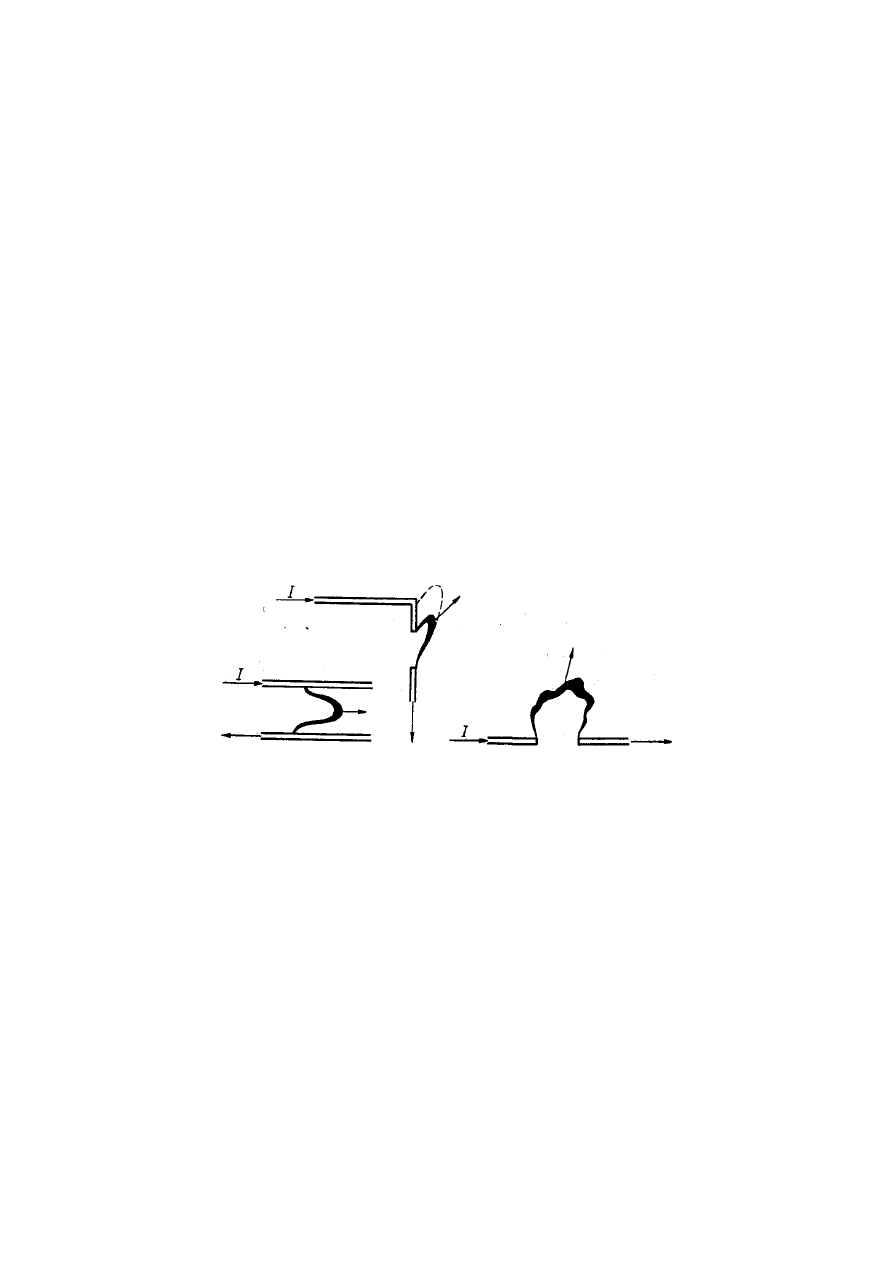
Łuk może być wydłużony siłami pola magnetycznego wytwarzanego przez układ
doprowadzeń prądu (elektrod), jak pokazano przykładowo na rys.3.1.
Rys.3.1. Wydłużanie i ruch łuku pod wpływem sił elektrodynamicznych
w różnych układach elektrod
Siła elektrodynamiczna działająca na element luku o długości
∆x wynosi
x
B
I
F
∆
⋅
⋅
=
(3.1)
gdzie: I - prąd w łuku; B - średnia wartość indukcji magnetycznej w kierunku prostopadłym
do elementu
∆x.
Na wydłużanie łuku może mieć również wpływ ruch nagrzanego otaczającego powietrza.
Ruch łuku wywołany siłami elektrodynamicznymi oraz siłami termicznymi powoduje jego
chłodzenie w nienagrzanym powietrzu. Chłodzenie łuku przy jednoczesnym wydłużeniu
prowadzi do jego zgaszenia.
Przy niskim napięciu (do lkV) przyjmuje się, że wartość prądu wyłączeniowego łuku
swobodnego gaszonego w powietrzu wynosi do ok. 25A.

9
Przy wysokim napięciu długość krytyczną łuku, m, można wyznaczyć ze wzoru
empirycznego
5
.
0
128
.
0
I
U
l
kr
⋅
⋅
≥
(3.2)
w którym: U - napięcie znamionowe sieci, [kV]; I - wartość początkowa prądu
wyłączeniowego [A].
Wobec znacznie większych wymiarów toru prądowego przy wysokim napięciu, na
rozciągnięcie łuku mają większy wpływ siły termiczne niż siły elektrodynamiczne.
Doświadczalnie stwierdzono, że prędkość naturalnego unoszenia nagrzanego powietrza
wynosi ok. l,5 m/s. Prędkość naturalnego unoszenia łuku jest nieco mniejsza i wynosi około
lm/s. Dla danej konfiguracji elektrod można oszacować kształt łuku. Znając prędkość
unoszenia można orientacyjnie określić prędkość wydłużania łuku.
Znając długość krytyczną łuku ze wzoru (3.2) i jego prędkość wydłużania, można obliczyć
czas gaszenia-łuku. Wartość tak obliczonego czasu należy traktować jako orientacyjną,
ponieważ łuk swobodny tworzy pętle, które mogą się zwierać, skracając długość łuku.
Ponadto na długość krytyczną gaszenia łuku mają istotny wpływ warunki atmosferyczne, a
zwłaszcza siła wiatru.
Gaszenie łuku w powietrzu atmosferycznym z wykorzystaniem czynników
zwiększających efektywność gaszenia
Gaszenie swobodnego łuku elektrycznego przy dużych prądach wiąże się z koniecznością
znacznego jego wydłużenia, co jest niekorzystne z uwagi na obecność dużej strefy zajętej
przez zjonizowany gaz, łatwość wystąpienia zwarć doziemnych i międzyfazowych, długi czas
gaszenia, a zatem i znaczne zużycie styków.
Celem wyeliminowania powyższych niekorzystnych czynników celowe jest zwiększenie
efektywności gaszenia oraz ograniczenia i zamknięcia obszaru, w którym łuk jest gaszony.
Jednym ze sposobów zwiększenia skuteczności gaszenia w powietrzu atmosferycznym jest
wykorzystanie płytek ceramicznych. Istotą gaszenia w tym przypadku jest zwiększony odbiór
mocy z łuku przez przewodzenie do ceramicznych ścianek. Łuk jest zmuszany do wydłużenia
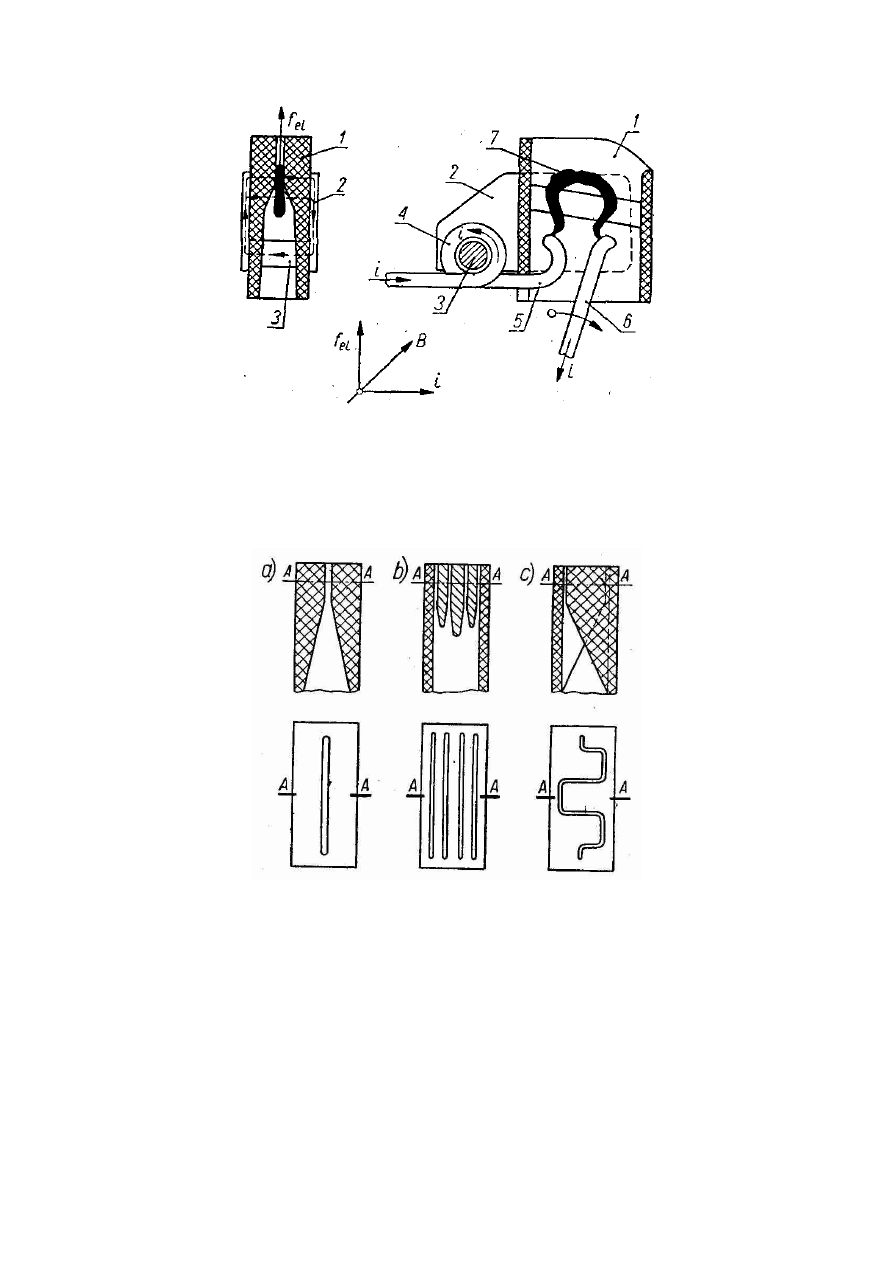
ruchu w komorze przez pole magnetyczne, wywołane prądem wyłączeniowym.
Ukształtowanie obwodu magnetycznego, działającego na łuk z siłą wg równania (3.1),
podano na rys.3.2. Raz dobrany właściwy kierunek nawinięcia elektromagnesu zapewnia
wytworzenie siły elektromagnetycznej zmuszającej łuk do wejścia do komory ceramicznej.
Przy zmianie kierunku prądu nastąpi jednocześnie zmiana kierunku pola magnetycznego, co
da ten sam kierunek siły.
Na rys.3.3 podano przykłady ideowych rozwiązań ceramicznych komór gaszeniowych.
Komora wąskoszczelinowa (rys.3.3a) dopuszcza ograniczoną długość łuku, stąd stosowana
jest przy niższych napięciach (do 3 kV prądu stałego i 6 kV prądu przemiennego).
10
Rys.3.2 Schemat gaszenia łuku z zastosowaniem wydmuchu magnetycznego w ceramicznej
komorze gaszeniowej
l — ścianka elektroizolacyjna komory gaszeniowej, 2 — nabiegunnik elektromagnesu
wydmuchowego, 3 — jarzmo elektromagnesu, 4—cewka elektromagnesu, S— styk
nieruchomy, 6 — styk ruchomy, 7 — łuk elektryczny
Rys. 3.3 Przykłady ceramicznych komór gaszeniowych o magnetycznym wydmuchu łuku: a),
b) komory wąskoszczelinowe, c) komora z łukiem falistym.
Dla wydłużenia łuku, a tym samym zwiększenia intensywności Odbioru energii z łuku,
stosuje się komory o ukształtowaniu ścianek ceramicznych wg rys.3.3b.
Przy napięciach 10-20 kV i dużych prądach wyłączeniowych (rzędu kilkunastu kA) konieczne
jest znaczne wydłużenie łuku. Można to uzyskać przez układ komory podany na rys.3.3c.
Płytki ceramiczne komory są umieszczone prostopadle do płaszczyzny styków i mają
dodatkowe elektrody pośrednie, zabezpieczające od wytapiania brzegów płytek.
Gaszenie łuku w komorach ceramicznych jest powszechnie stosowane w łącznikach prądu
stałego i przemiennego niskiego napięcia, przy prądach wyłączeniowych do kilkudziesięciu
kA oraz przy napięciu wysokim stałym do 3 kV i prądach spodziewanych nawet do 50 kA i
przy napięciu przemiennym do 15 k V i prądach do ok. 20 kA.

11
4. Badania aparatury łączeniowej
W elektrotechnice i elektroenergetyce stosowany jest szereg urządzeń służących do
załączania, przełączania i wyłączania sieci zasilających urządzeń elektrycznych, obwodów
sterowania, sygnalizacji i zabezpieczeń tych urządzeń. Urządzenia spełniające wymienione
funkcje nazywane są ogólnie aparaturą łączeniową, dzielą się w zależności od przeznaczenia
na szereg grup bardzo różnych pod względem konstrukcyjnym. Różnice konstrukcyjne wyni-
kają głównie z wartości prądów i napięć obwodów, w których spełniają one funkcje
łączeniowe oraz od tego czy służą do załączania i wyłączania prądów lub też do wyłączania
prądów zwarć. Wyróżnia się następujące podzespoły wchodzące w skład konstrukcji łącznika:
- napęd (elektromagnetyczny, silnikowy, pneumatyczny lub ręczny) służący do
zamykania styków roboczych,
- zespół styku lub styków roboczych,
- napęd służący do otwierania styków roboczych (najczęściej sprężynowy lub ręczny).
Oprócz wymienionych wyżej podzespołów, łącznik w zależności od przeznaczenia może być
wyposażony w szereg dodatkowych urządzeń pozwalających na przerywanie obwodów o
dużych mocach. W skład tego wyposażenia można zaliczyć:
- kominki gasikowe do gaszenia łuku elektrycznego,
- cewki wydmuchowe łuku elektrycznego,
- zespół przełączanych styków pomocniczych (malej mocy) zwiernych, rozwiernych lub
przełączanych,
- wyzwalacze napędu otwierającego (nadmiarowe, termiczne) blokujące napęd
otwierający w stanie załączonym,
- urządzenie blokujące napęd przed ponownym załączeniem przy stanie zwarcia w
obwodzie.
Z punktu widzenia konstrukcyjnego rozróżnia się podział na łączniki prądu stałego i
zmiennego oraz na suche (styki pracują w powietrzu lub innym gazie obojętnym) i mokre
(styki pracują w oleju).
Pod względem zastosowania łączniki dzielimy na grupy wymienione w tabeli 1.
Każdy łącznik poza wyłącznikiem powinien być zabezpieczony bezpiecznikiem
przerywającym prąd zwarcia w obwodzie, ponieważ do przerywania prądów o wartościach
wyższych od roboczych konstrukcyjnie są przystosowane jedynie wyłączniki. Przykładowy
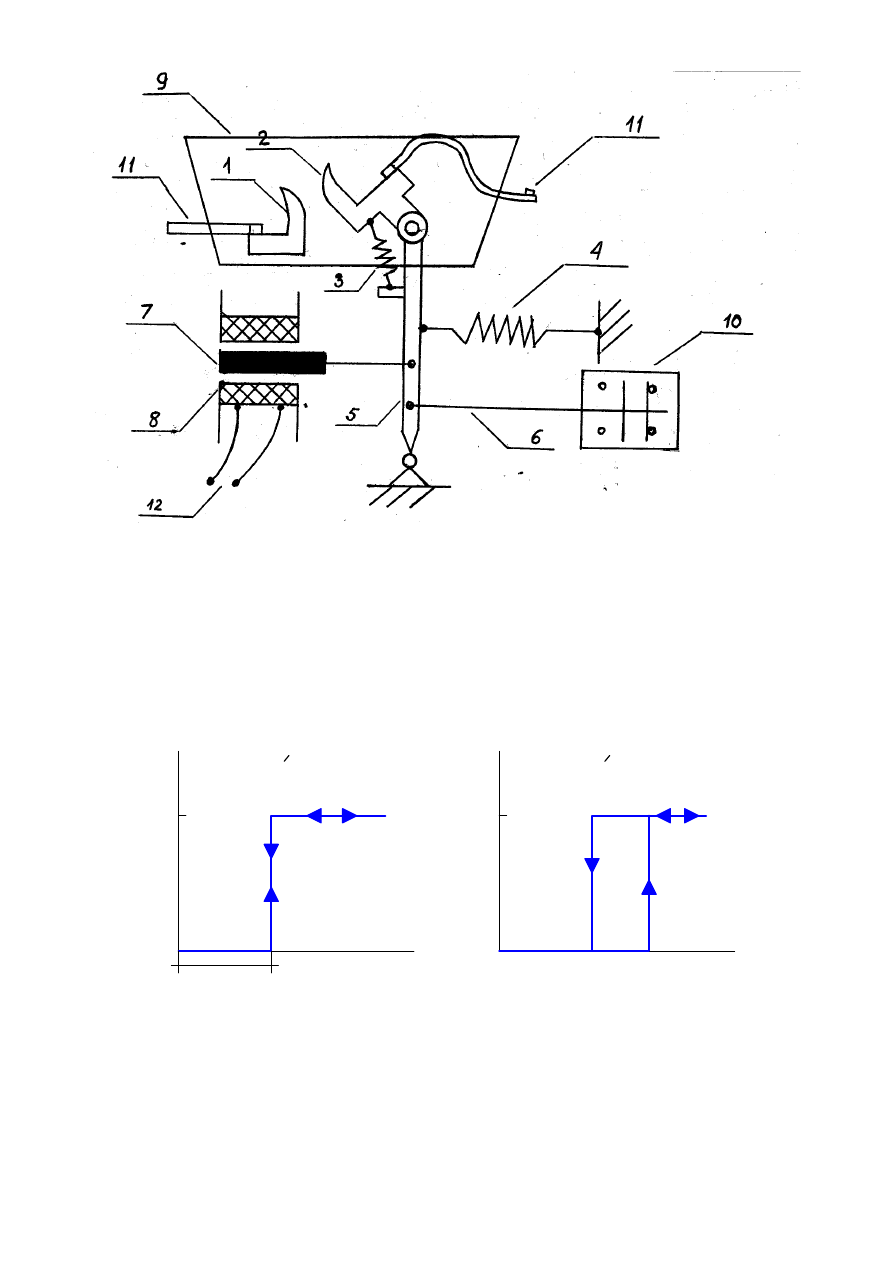
poglądowy widok (w przekroju) konstrukcji stycznika jest pokazany na rys.4.1.
Stycznik i wyłącznik mogą być wyposażone w wyzwalacz termo-bimetaliczny lub
nadmiarowo prądowy zabezpieczający zasilacze urządzenia przed przeciążeniami i
zwarciami. Charakterystyki łączników opisujące stan położenia styków w funkcji wielkości
wymuszającej zadziałania napędu mają przebieg tzw. z opóźnieniem i z histerezą.
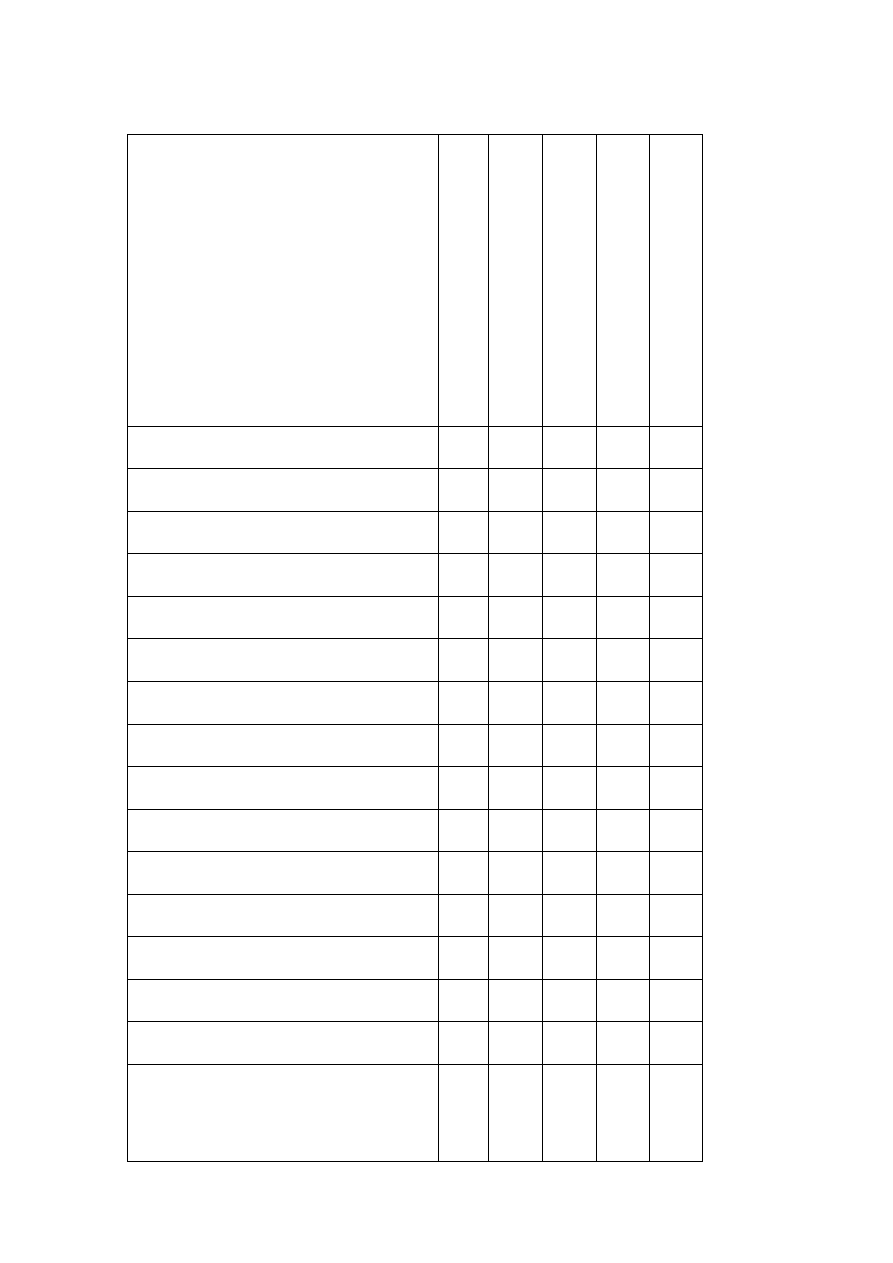
Tabela 1
Na
zwa
r
ę
c
z
n
y
e
l
e
k
t
r
o
m
a
g.
s
i
l
n
i
k
o
w
y
p
n
e
u
m
a
t
y
cz
n
y
n
a
p.
s
p
r
ę
ż
y
n
o
w
y
k
o
m
i
n
e
k
c
e
w
k
a
w
y
d
m
u
c
h.
s
t
y
k
i
p
o
m
o
c
n.
w
y
z
w
a
l
a
c
z
u
r
z
ą
d
z
e
n
i
e
b
l
o
k
r
o
z
ł.
p
r
ą
d
u
o
b
c.
r
o
z
ł.
p
r
ą
d
ó
w
z
w.
s
u
c
h
y
m
o
k
r
y
z
a
b
e
z
p
i
e
c
z.
b
e
z
p.
Zastosow
anie
przycisk
+
-
-
-
-
-
-
-
-
-
+
-
+
-
+
łą
czenie obwodów o m
ał
ej m
ocy:
oś
wietlenie, sygnalizacja
przeka
źni
k
-
+
-
+
+
-
-
-
-
-
+
-
+
-
+
łą
czenie obwodów sterowania i
autom
atyki
od
łą
czn
ik
+
+
+
+
1
-
-
+
-
-
-
-2
-
+
-
+
łą
czenie obwodów du
żej m
ocy bez
obci
ąż
en
ia
styczn
ik
+
+
+
+
+
+
+
-
+
+
-
-
+
-
+
+
+
łą
czenie obwodów du
żej m
ocy z
obci
ąż
en
iem
wy
łą
cznik
+
+
+
+
+
+
+
-
+
+
-
+
-
+
+
+
+
-
łą
czenie obwodów du
żej m
ocy,
wy
łą
czanie zwar
ć
1 – jak nap
ęd za
łą
czaj
ący.
2 – dopuszcza si
ę za
łą
czanie nieobci
ąż
onych transform
atorów.
13
Rys.4.1 Idea konstrukcji stycznika. Oznaczenia: 1 - styk nieruchomy; 2 - styk ruchomy; 3 -
sprężyna odciągająca styk ruchomy w chwili załączenia lub rozłączenia tak, aby łuk elektryczny nie
palił się pomiędzy powierzchniami roboczymi styków; 4 - sprężyna napędu otwierającego; 5 -
dźwignia napędu styku ruchomego; 6 - dźwignia styków pomocniczych; 7 - rdzeń elektromagnesu
napędu załączającego; 8 - cewka elektromagnesu napędu załączającego; 9 - kominek gasikowy; 10
- styki pomocnicze; 11 - przewody łączące styki główne z obwodem roboczym; 12 - przewody
cewki elektromagnesu, (napięcie napędu może być różne od napięcia roboczego).
a) b)
1
stan zalaczenia lacznika
U
1
stan zalaczenia lacznika
U
∆ h
0
0
Rys.4.2. Uproszczone charakterystyki łączników.
a) z uwzględnieniem opóźnienia
∆h
b) z uwzględnieniem opóźnienia i histerezy
stan "0" - otwarty; stan "1" - zamknięty.
14
Przekaźniki
Przekaźnikami są urządzeniami pracującymi w dwóch stanach pracy. Przejście z jednego stanu
pracy do drugiego następuje pod wpływem energii dostarczanej z zewnątrz. W zależności od
rodzaju energii, na którą przekaźnik reaguje, rozróżniamy przekaźniki: elektromagnetyczne
obojętne i polaryzowane, magnetoelektryczne, elektrodynamiczne, indukcyjne, elektrostatyczne,
elektroniczne, magnetyczne, fotoelektryczne i inne. Przekaźniki są to najczęściej urządzenia
elektromechaniczne zaopatrzone w styki, za pomocą których mogą łączyć dowolny obwód
elektryczny tub jego część. Stan pracy przekaźnika jest określony położeniem jego styków: ,,styki
zwarte" i ,,styki rozwarte".
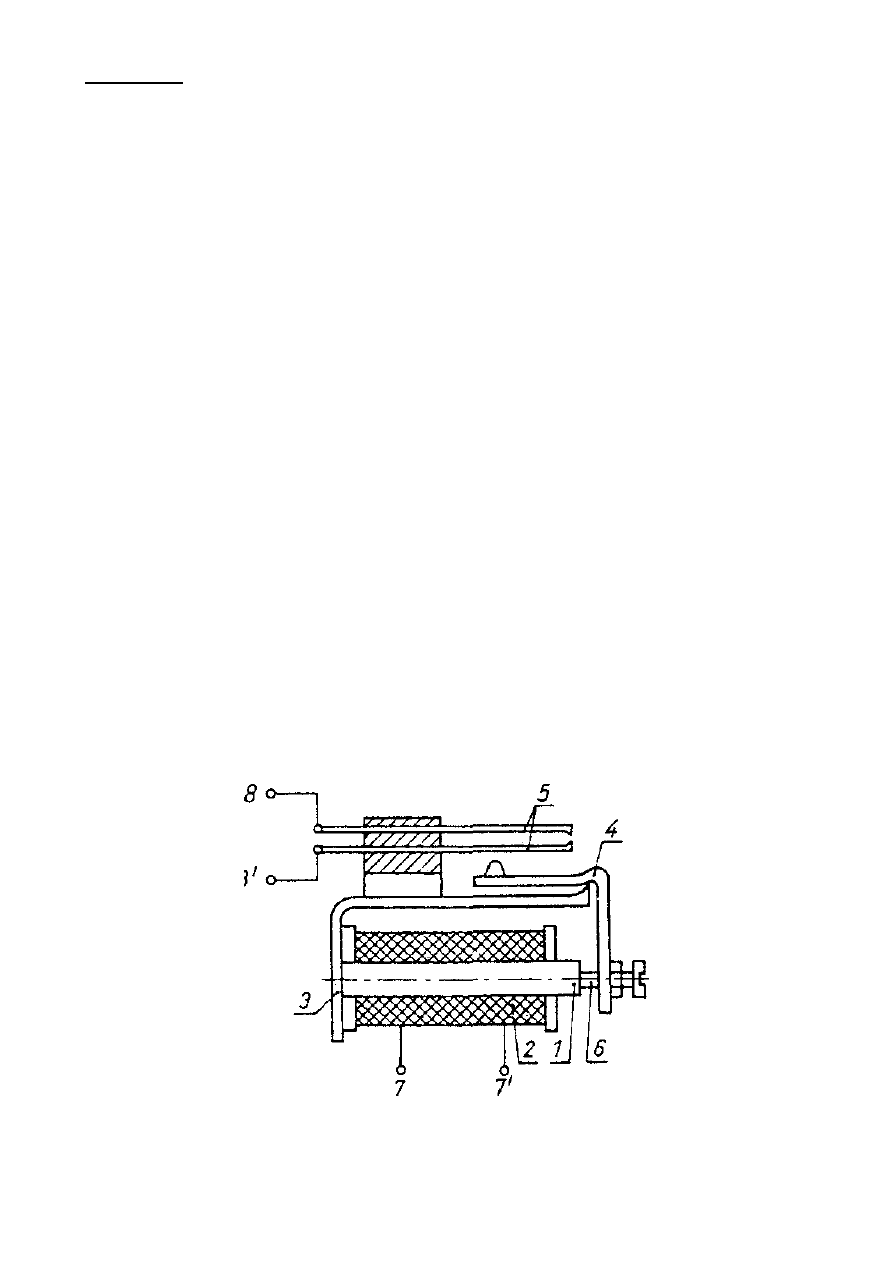
Przekaźnik elektromagnetyczny obojętny
Przekaźniki elektromagnetyczne obojętne są najczęściej spotykane w urządzeniach
telekomunikacyjnych, sygnalizacyjnych i zabezpieczeniowych oraz w układach automatycznego
sterowania, Przekaźnik taki (rys.4.3) składa się z rdzenia stalowego I, na który nawinięta jest cewka
2. Końce cewki 7-7' łączy się z obwodem sterującym pracą przekaźnika. Przepływowi prądu przez
cewkę towarzyszy powstanie strumienia magnetycznego, który zamyka się przez jarzmo 3 i
ruchomą kotwice 4. Kotwica (zwora), przywierając do rdzenia na najmniejsza odległość określony
przez regulowaną śrubą przekładkę antymagnetyczną 6, swoją dzwignią zwiera lub rozwiera układ
styków 5. Zaciski 8-8' służą do połączenia styków przekaźnika z obwodem sterowanym.
W praktyce bardzo rzadko przekaźnik ma tylko jedną parę styków. Najczęściej styków tych jest
kilka lub kilkanaście par, a przekaźnik w czasie pracy może jedne styki łączyć i równocześnie
rozłączać pozostałe styki. Takie rozwiązanie zapewnia większą operatywność przekaźnika. Zestyki
(para styków) przekaźnika wykonuje się ze srebra, złota lub platyny. Wymaga się od nich, aby
przy małym docisku zapewniały bardzo dobrą styczność oraz miały dużą wytrzymałość
mechaniczną. Blachy, z których wykonuje się rdzenie przekaźników, wytwarzane są ze stali
magnetycznej miękkiej. Ich wadą jest pozostałość magnetyczna, która jest przyczyną przywierania
kotwicy do rdzenia, nawet przy braku prądu zasilającego cewkę. Aby uniknąć tego szkodliwego
zjawiska stosuje się przekładkę antymagnetyczna, która ogranicza najmniejsza odległość miedzy
rdzeniem i kotwicą powodując jej odpadanie przy braku prądu.
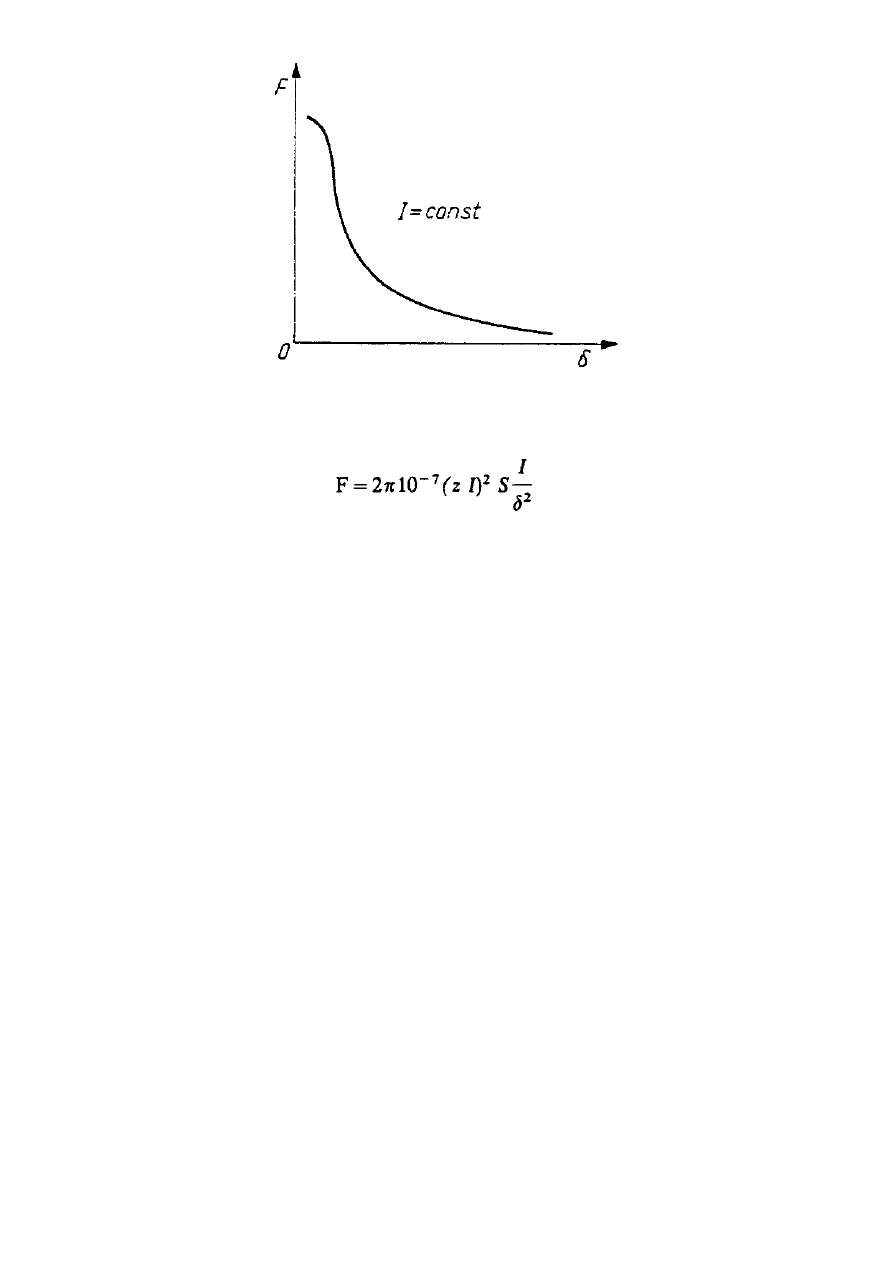
Siła działająca na kotwicę przekaźnika nazywa się siłą elektromechaniczną. Zależy ona od prądu
płynącego przez cewkę przekaźnika o z zwojach i szczeliny powietrznej 6 miedzy rdzeniem i
kotwica.
Rys.4.3. Schemat przekaźnika elektromagnetycznego obojętnego
15
Rys.4.4 Charakterystyka elektromechaniczna przekaźnika elektromagnetycznego
Wzór przybliżony na obliczenie tej siły ma postać:
przy czym: F - siła [N], I - prąd [A], S - szczelina w [m], S - powierzchnia przekroju rdzenia [m
2
].
Zależność siły elektromechanicznej od szczeliny powietrznej nosi nazwę charakterystyki elektro-
mechanicznej przekaźnika (rys.4.4). Przekaźnik powinien być tak zaprojektowany, aby sita
elektromechaniczna działająca na kotwice była zawsze 1,5 do 2 razy większa od siły sprężyn
odciągających te kotwice. Opisany przekaźnik działa przy prądzie stałym. Siła działająca na
kotwice nie zależy od kierunku prądu. Dokonując niewielkich zmian konstrukcyjnych,
przedstawiony przekaźnik można wykorzystać do pracy przy prądzie przemiennym. Przekaźnik,
który reaguje zmianę położenia kotwicy na kierunek prądu płynącego w uzwojeniu sterującym
nazywamy przekaźnikiem polaryzowanym. Przekaźniki polaryzowane oprócz rdzenia, kotwicy,
styków i uzwojeń mają również magnes trwały.
Przekaźniki elektromagnetyczne specjalne
Przekaźnik elektryczny jest przyrządem, który pod wpływem zmiany działającej na niego wielkości
elektrycznej (prądu, napięcia) steruje obwodami elektrycznymi. W zależności od sposobu działania
i celu stosowania rozróżnia się:
• Przekaźniki nadmiarowo-prądowe reagujące na wzrost prądu ponad wartość rozruchowa,
nastawioną na podziałce przekaźnika. Stosuje sieje w celu zabezpieczenia urządzeń od przeciążeń
i zwarć.
• Przekaźniki podnapięciowe reagujące na zmniejszenie się napięcia poniżej wartości rozruchowej
nastawionej na podziałce.
• Przekaźniki pomocnicze reagujące na pojawienie się lub zanik wielkości oddziaływującej. Nie
mają one podziałki.
16
Styczniki
Charakterystyka czasowa przekaźnika termicznego
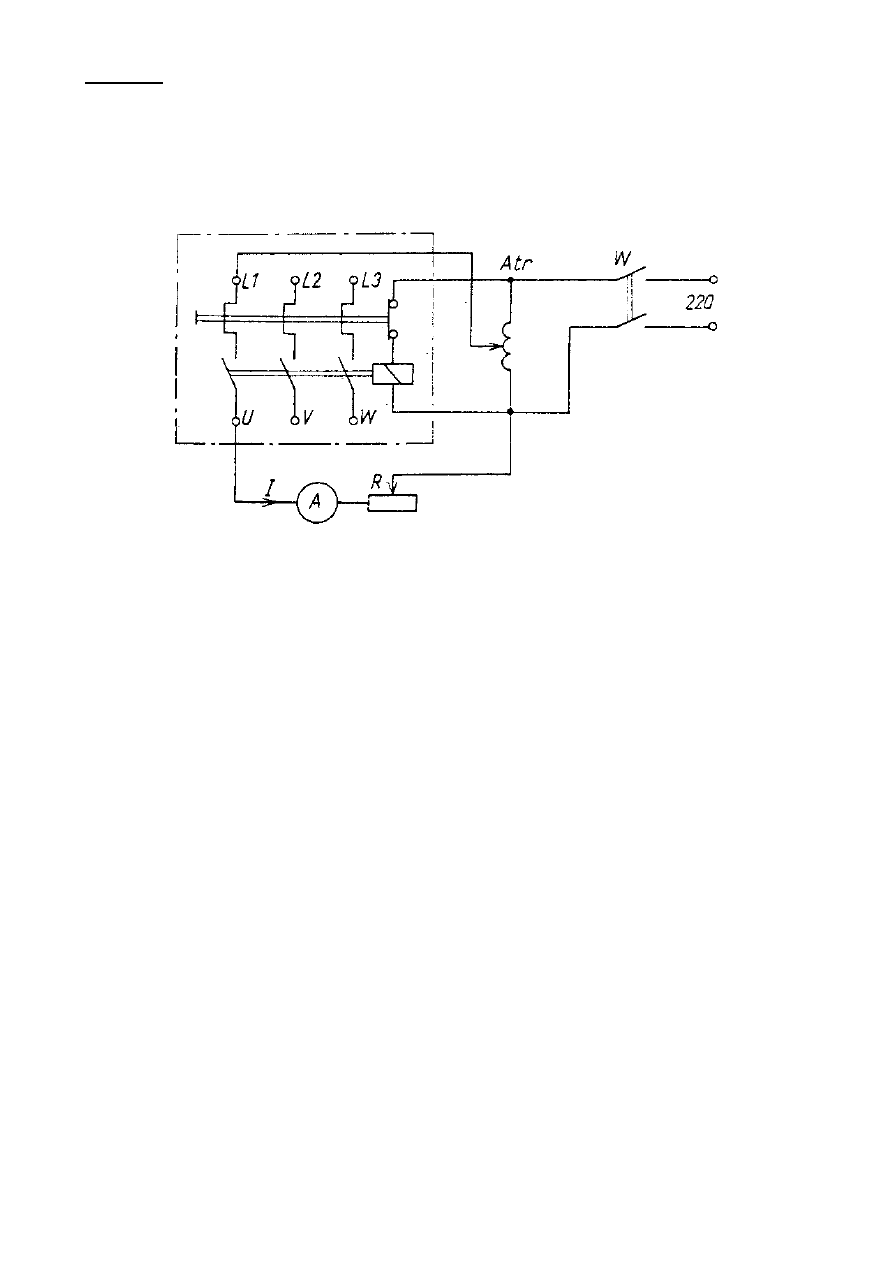
Charakterystykę czasową przekaźnika termicznego wyznacza się w układzie przedstawionym na
rys.4.5.
Przekaźnik termiczny
Rys.4.5 Układ do wyznaczania charakterystyki czasowej przekaźnika termicznego
Za pomocą autotransformatora Atr i rezystora suwakowego R nastawia się prąd / płynący przez
styki główne stycznika tak, aby był on 1,3 razy większy od prądu znamionowego I
N
, I=1,3I
N
. Do
pomiaru tego prądu służy amperomierz elektromagnetyczny A. Po nastawieniu zadanej wartości
prądu wyłącza się stycznik na krótki okres w celu ostudzenia elementów bimetalowych przekaźnika
termicznego, następnie załącza ponownie stycznik do sieci wraz z obciążeniem (rezystor R) i i
mierzy czas, po którym nastąpi wyłączenie stycznika przez przekaźnik termiczny. Po ostudzeniu
elementów bimetalowych stycznika powtarza się pomiary przy kolejnych wartościach prądu
płynącego przez styki główne.
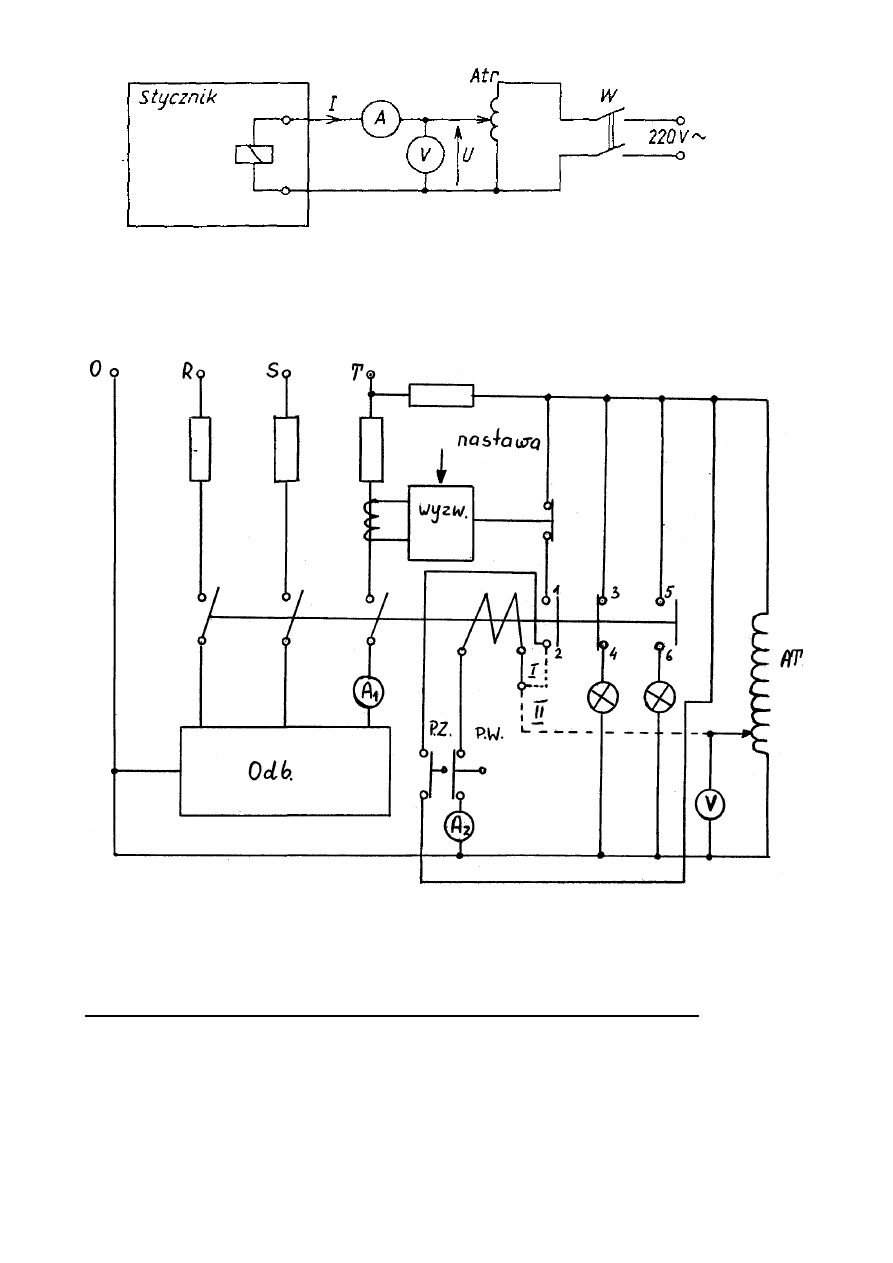
Badanie elektromagnesu napędowego
Badanie elektromagnesu napędowego wykonuje się w układzie przedstawionym na rys.4.6.
Pomiary rozpoczyna się od zmierzenia napięcia rozruchowego U
r
, przy którym następuje
przyciągniecie zwory. Wskazuje je woltomierz elektromagnetyczny V. Za pomocą
autotransformatora Atr zwiększa się napięcie do wartości, przy której następuje przyciągniecie
zwory. Pomiary powtarza się trzy razy. Następnie mierzy się napięcie powrotu U, czyli napięcie,
przy którym następuje odpadnięcie zwory stycznika (wyłączenie stycznika). Do cewki stycznika
przykłada się napięcie większe od napięcia rozruchowego zmniejszając je do wartości, przy której
nastąpi odpadnięcie zwory. Pomiar powtarza się trzykrotnie. Amperomierz elektromagnetyczny A
umieszczony w układzie (rys.4.6) służy do pomiaru prądu pobieranego przez elektromagnes
podczas rozruchu i przy przyciągniętej zworze.
17
Rys.4.6 Układ do badania elektromagnesu stycznika
Układ połączeń obwodu stycznika przedstawiony jest na rys.4.7.
Rys.4.7
wariant I - połączenie przy pracy normalnej i skalowaniu wyzwalacza
wariant II - połączenie przy badaniu napędu stycznika.
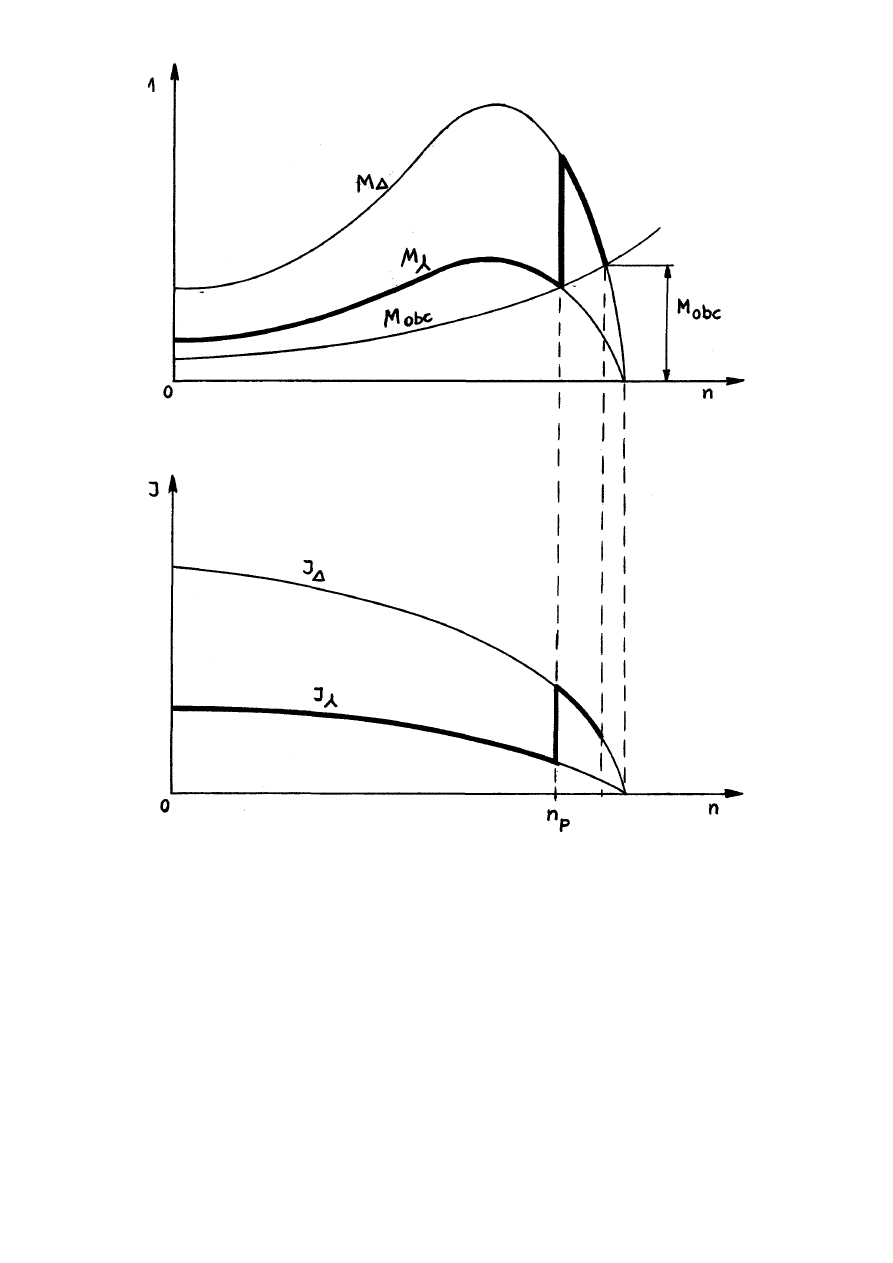
Rozruch silnika klatkowego przy pomocy przełącznika gwiazda – trójkąt
Na rysunku 4.8 pokazane są charakterystyki momentu i prądu silnika klatkowego w funkcji
obrotów przy połączeniu obwodu uzwojeń stojana w układ gwiazdy i układ trójkąta.
Moment obrotowy silnika asynchronicznego (silnik klatkowy należy do silników
asynchronicznych) można opisać równaniem:
18
2
2
2
2
2
2
sX
R
R
cU
M
+
⋅
=
gdzie:
c - stała konstrukcyjna
U - napięcie przyłożone do fazy uzwojenia stojana
R
2
- zastępcza rezystancja wirnika
X
2
- zastępcza reaktancja wirnika
s - poślizg
Powyższe równanie uzależnia wielkość momentu od napięcia (zależność kwadratowa) oraz od
obrotów (poślizg). Zarówno moment jak i prąd przyjmują wartości większe dla połączenia w trójkąt
w stosunku do połączenia w układzie trójkąta. O ile duża wartość momentu jest korzystna, to duże
prądy powodują przede wszystkim konieczność przewymiarowania bezpieczników, co jest bardzo
niekorzystne ze względu na zabezpieczenie przeciwzwarciowe obwodu, przełącznik gwiazda -
trójkąt stosowany jest w celu zmniejszenia wartości prądu rozruchowego. Na wykresach z rysunku
8 liniami pogrubionymi pokazany jest poślizg momentu i prądu silnika z zastosowanym prze-
łącznikiem gwiazda - trójkąt, przełączenie uzwojeń stojana silnika z połączenia w gwiazdę w układ
trójkąta powinno następować przy obrotach n
p
(rys.4.8). Zapewnia się w ten sposób krótki czas
rozruchu przy stosunkowo niewielkim wzroście prądu (duża wartość momentu w chwili
przełączenia).
Przełącznik gwiazda - trójkąt można stosować tylko dla silników o wyprowadzonych na tabliczkę
zaciskową obu końcach każdego z uzwojeń faz stojana i tylko dla silników, które konstrukcyjnie są
przystosowane do pracy w układzie trójkąta dla danego napięcia przewodowego sieci zasilającej,
znaczy to, że napięcie znamionowe każdego uzwojenia fazowego stojana musi być równe napięciu
przewodowemu sieci zasilającej.
Dla silnika klatkowego obowiązują zależności :
gdzie:
I
r
- prąd rozruchu
M
r
- moment rozruchu
Właściwe operowanie przełącznikiem zapewnia złagodzenie przebiegu prądu rozruchowego. Jak
wspomniano wyżej przełączenie powinno być dokonane przy odpowiedniej wartości obrotów.
Jeżeli silnik napędza urządzenie o stałej charakterystyce momentu oporowego od obrotów, to
można dokonywać przełączenia w określonym czasie od chwili załączenia.
19
Rys.4.8 Rozruch silnika klatkowego przy pomocy przełącznika gwiazda – trójkąt.
Charakterystyki M = f(n) ; I = f(n) silnika klatkowego.
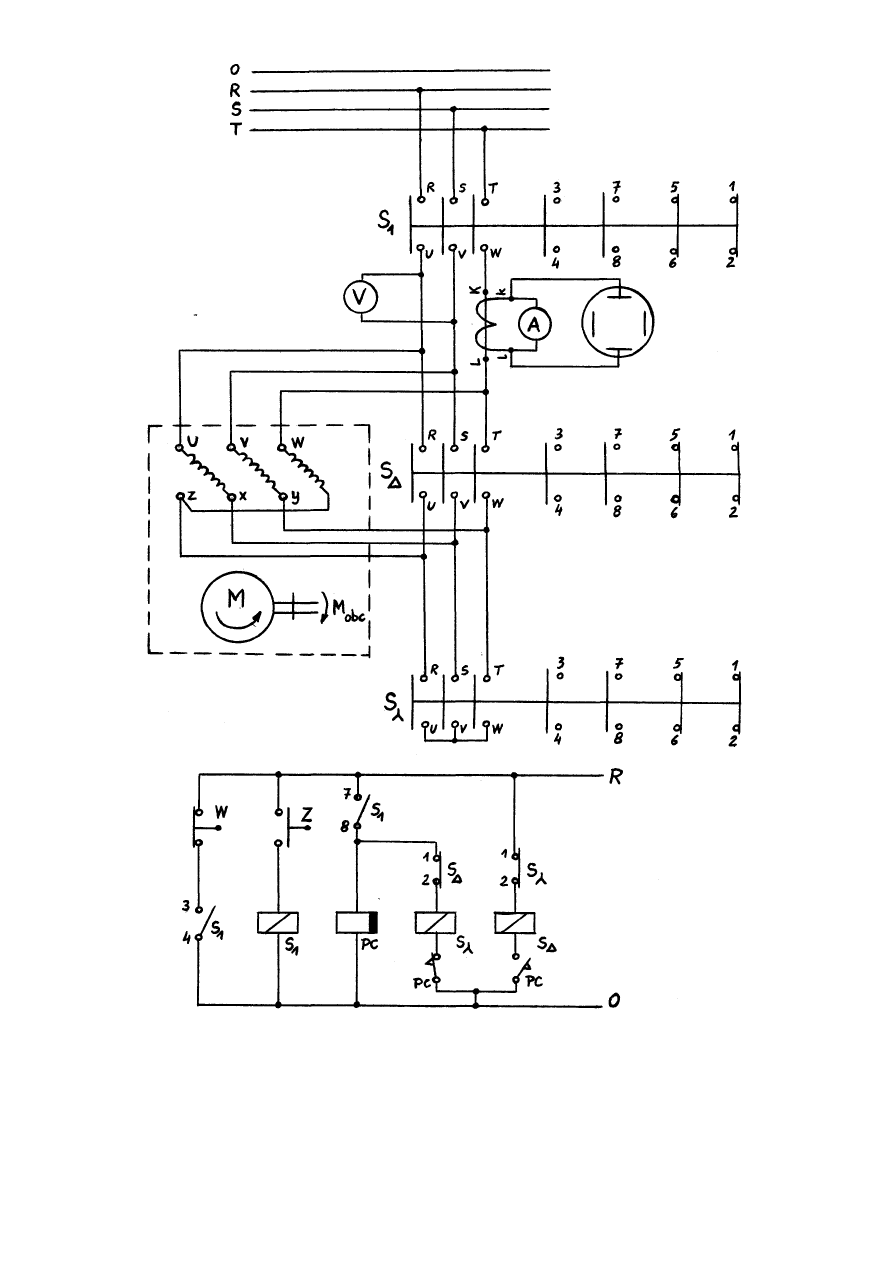
Na rysunku 4.9 pokazany jest schemat układu rozruchowego silnika klatkowego z przełącznikiem
gwiazda - trójkąt sterowanym przez przekaźnik czasowy.
20
Rys.4.9
21
Celem pomiarów jest przebadanie układu napędowego z silnikiem klatkowym wyposażonym w
przełącznik gwiazda - trójkąt oraz dobranie czasu przełączenia przełącznika w zależności od
momentu hamującego.
Pomiary kalibracji wyzwalacza (układ połączeń w wariancie II - rys.4.7)
LP
I
nastA
I
1obcA
t zadziałania
sek
Uwagi
1
2
4
5
6
Pomiar charakterystyki łącznika (układ połączeń w wariancie II - rys.4.7)
Rosnące
Malejące
U
I
2
U
I
2
LP
[V]
[A]
[V]
[A]
Uwagi
Na podstawie otrzymanych wyników należy wykreślić:
- charakterystyką I
nast.
= f(t) dla zadziałania wyzwalacza
- charakterystykę łącznika I
2
w funkcji położenia styków
- charakterystykę I
2
= f(U)
t
I
r(gwiazda)
I
r(trójkąt)
I
rg
/I
rt
LP
sek
A
A
-
Uwagi
1
M
obc
= M
1
2
M
obc
= M
1
3
M
obc
= M
1
4
M
obc
= M
1
1
M
obc
= M
2
2
M
obc
= M
2
3
M
obc
= M
2
4
M
obc
= M
2
Literatura
1. Zofia Majerowska - Laboratorium Elektrotechniki Ogólnej - maszyny elektryczne. WPW, W-wa
1979.
2. Władysław Wasiluk - Maszyny i urządzenia elektryczne. WPW, W-wa 1976.
3. Marek Pilawski - Pracownia elektryczna WSiP, W-wa 1995.
4. Zbigniew Ciok – Procesy łączeniowe w układach elektroenergetycznych WNT1983
Document Outline
- Zestyki elektryczne
- Wyłączanie prądu stałego
- Technika gaszenia łuku elektrycznego
- Badania aparatury łączeniowej
- Nazwa
- Zastosowanie
- Rys.4.9
Wyszukiwarka
Podobne podstrony:
APARATURA LACZENIOWA list2003
08 Aparatura łączeniowa
Dobieranie i sprawdzanie aparatury łączeniowej i sterowniczej
aparatura laczeniowa id 66880 Nieznany
07 Aparatura łączeniowa
Aparatura łączeniowa i sterownicza
12 Dobieranie i sprawdzanie aparatury łączeniowej
08 Aparatura łączeniowa
Dobieranie i sprawdzanie aparatury łączeniowej i sterowniczej
Aparatura chemiczna wirówki
U 8 Zestyki w aparatach elektrycznych
APARATURA DO OCENY RÓWNOWAGI STATYCZNEJ
Ćwiczenia 3 Łączenie źródeł napięcia
aparaty cyfrowe praktyczny przewodnik r 14 trudne zdjecia stan sitwe helion 56GBUFHXJXG6NRFSKVYCN
Aparatura sciaga mini
10 Laczenie, podzial, przekszta lcanie spolek FOLIE
więcej podobnych podstron