
Bożena Szkopińska
Wykład z algebry – definicje i twierdzenia
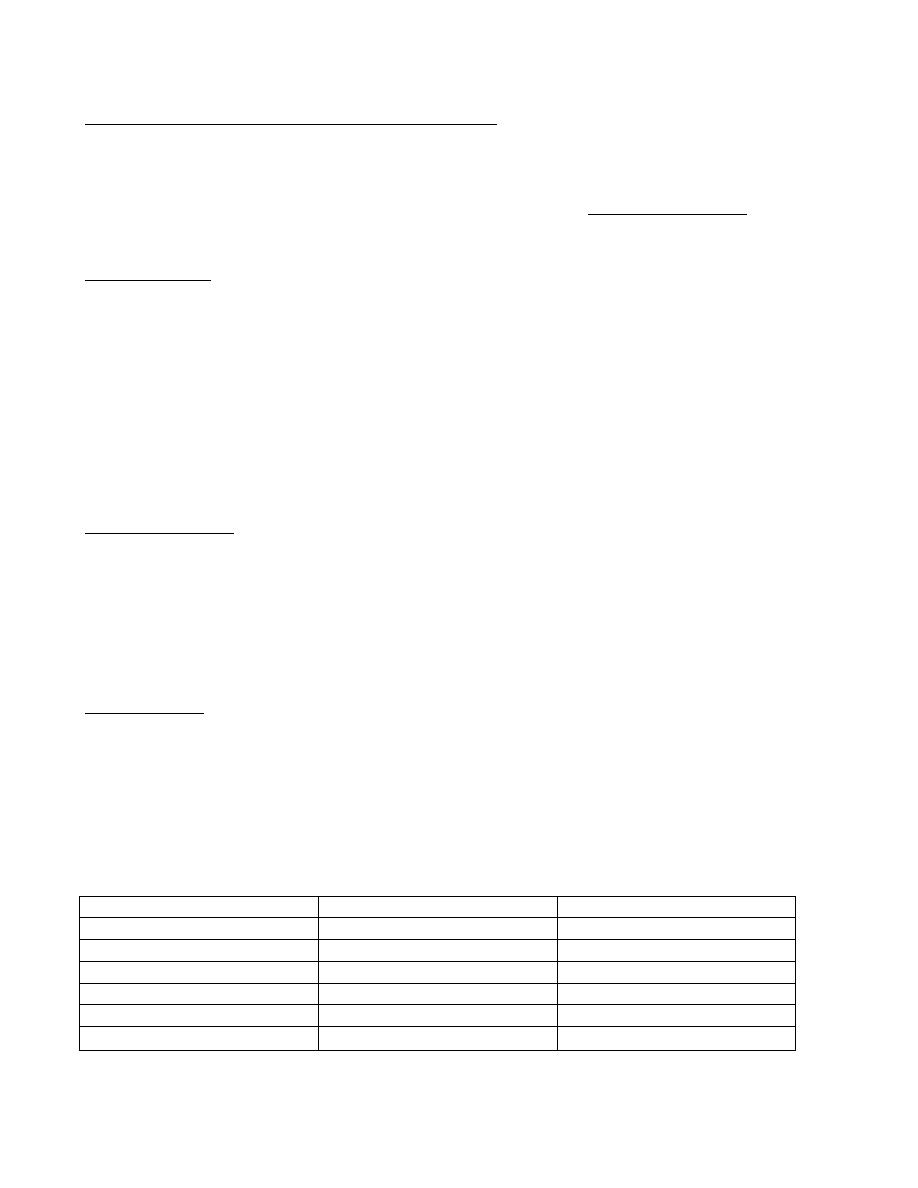
Definicja (działanie wewnętrzne, struktura algebraiczna)
Działaniem wewnętrznym dwuargumentowym określonym (wykonalnym) w niepustym zbiorze A
nazywamy każdą funkcję
A
A
A
f
→
×
:
Przyjmujemy oznaczenie:
b
a
b
a
f
o
=
)
,
(
Niepusty zbiór A z określonym działaniem wewnętrznym nazywamy strukturą algebraiczną i
oznaczamy
.
)
,
(
o
A
Definicja (grupa)
Strukturę
(
nazywamy grupą jeśli jednocześnie zachodzą warunki:
)
,
⊕
A
1.
-
łączność
)
(
)
(
,
,
c
b
a
c
b
a
A
c
b
a
⊕
⊕
=
⊕
⊕
∈
∧
2.
- istnienie elementu neutralnego
A
e
∈
∨
a
e
a
a
e
A
a
=
⊕
=
⊕
∈
∧
3.
- istnienie elementu symetrycznego (a')
e
a
a
a
a
A
a
A
a
=
⊕
=
⊕
∈
∈
∨
∧
'
'
'
Jeśli ponadto zachodzi
4.
-
przemienność
a
b
b
a
A
b
a
⊕
=
⊕
∈
∧
,
to
nazywamy grupą przemienną (inaczej grupą abelową).
)
,
(
⊕
A
Definicja (pierścień)
Jeśli w zbiorze
są określone dwa dwuargumentowe działania
∅
≠
A
⊕ oraz ⊗ , ponadto
)
,
(
⊕
A
jest
grupą przemienną i zachodzi
5.
-
łączność działania
)
(
)
(
,
,
c
b
a
c
b
a
A
c
b
a
⊗
⊗
=
⊗
⊗
∈
∧
⊗
6.
- rozdzielność działania
)
(
)
(
)
(
,
,
c
b
c
a
c
b
a
A
c
b
a
⊗
⊕
⊗
=
⊗
⊕
∈
∧
⊗ względem ⊕
to
nazywamy pierścieniem.
)
,
,
(
⊗
⊕
A
Definicja (ciało)
Ciałem nazywamy pierścień
w którym zachodzi ponadto
)
,
,
(
⊗
⊕
A
7.
- istnienie elementu neutralnego działania
a
e
a
a
e
A
a
A
e
=
⊗
=
⊗
∈
∈
∧
∨
'
'
'
⊗
8.
- istnienie elementu symetrycznego ( )
}
{
'
ˆ
ˆ
ˆ
\
e
a
a
a
a
A
a
e
A
a
=
⊗
=
⊗
∈
∈
∨
∧
aˆ
9.
-
przemienność działania
a
b
b
a
A
b
a
⊗
=
⊗
∈
∧
,
⊗
Przyjęte są następujące oznaczenia i terminologia
Symbol Oznaczenie
Określenie
⊕
+ dodawanie
⊗
•
mnożenie
e 0 element
zerowy
e' 1 jedność
a'
-a
element przeciwny do a
aˆ
1
a
−
element odwrotny do a
2
Twierdzenie
Ciało zawiera co najmniej dwa elementy (
1
0
≠ ). W ciele
)
,
,
(
•
+
K
0
0
0
,
=
∨
=
⇔
=
•
∈
∧
b
a
b
a
K
b
a
0
0
=
•
∈
∧
a
K
a
Rozważmy ciało
. Przyjmijmy, że
. Wtedy rozwiązaniem równania
są liczby
urojone i oraz –i.
)
,
,
(
•
+
R
1
2
−
=
i
1
2
−
=
x
Definicja (ciało liczb zespolonych)
Ciałem liczb zespolonych nazywamy zbiór liczb postaci
z dodawaniem + i z
mnożeniem .
}
1
,
:
{
2
−
=
∧
∈
+
i
R
b
a
bi
a
•
Uwaga
}
1
,
:
{
2
−
=
∧
∈
+
=
i
R
b
a
bi
a
C
ozn
Twierdzenie
Ciało
jest to najmniejsze ciało (w sensie inkluzji) zawierające ciało
oraz liczbę
urojoną i
)
,
,
(
•
+
C
)
,
,
(
•
+
R
Definicja (ciało liczbowe)
Ciało
oraz każdy podzbiór C, który ze względu na działania + i jest ciałem (podciało)
nazywamy ciałem liczbowym.
)
,
,
(
•
+
C
•
Twierdzenie
Najmniejszym ciałem liczbowym w sensie inkluzji jest ciało liczb wymiernych
.
)
,
,
(
•
+
Q
Twierdzenie (zasadnicze twierdzenie algebry)
Każdy wielomian stopnia dodatniego o współczynnikach zespolonych rozkłada się w C na czynniki
liniowe.
Definicja (struktury izomorficzne)
Dwie struktury algebraiczne nazywamy izomorficznymi jeśli istnieje funkcja odwzorowująca
wzajemnie jednoznacznie jedną strukturę na drugą zachowująca wszystkie działania.
Definicja (przestrzeń liniowa)
Niech
będzie ciałem liczbowym oraz
)
,
,
(
•
+
K
∅
≠
V
będzie grupą przemienną z pewnym działaniem
. Określmy ponadto działanie zewnętrzne
⊕
V
V
K
→
×
:
*
takie, że:
1.
v
b
v
a
v
b
a
K
b
a
V
v
*
*
*
)
(
,
⊕
=
+
∈
∈
∧
∧
2.
w
a
v
a
w
v
a
K
a
V
w
v
*
*
)
(
*
,
⊕
=
⊕
∈
∈
∧
∧
3.
)
*
(
*
*
)
(
,
v
b
a
v
b
a
K
b
a
V
v
=
•
∈
∈
∧
∧
4.
v
v
V
v
=
∈
∧
*
1
3
Wówczas strukturę
nazywamy przestrzenią liniową (wektorową) nad ciałem K. Elementy
zbioru V nazywamy wektorami a elementy zbioru K nazywamy skalarami.
*)
,
,
,
(
K
V
⊕
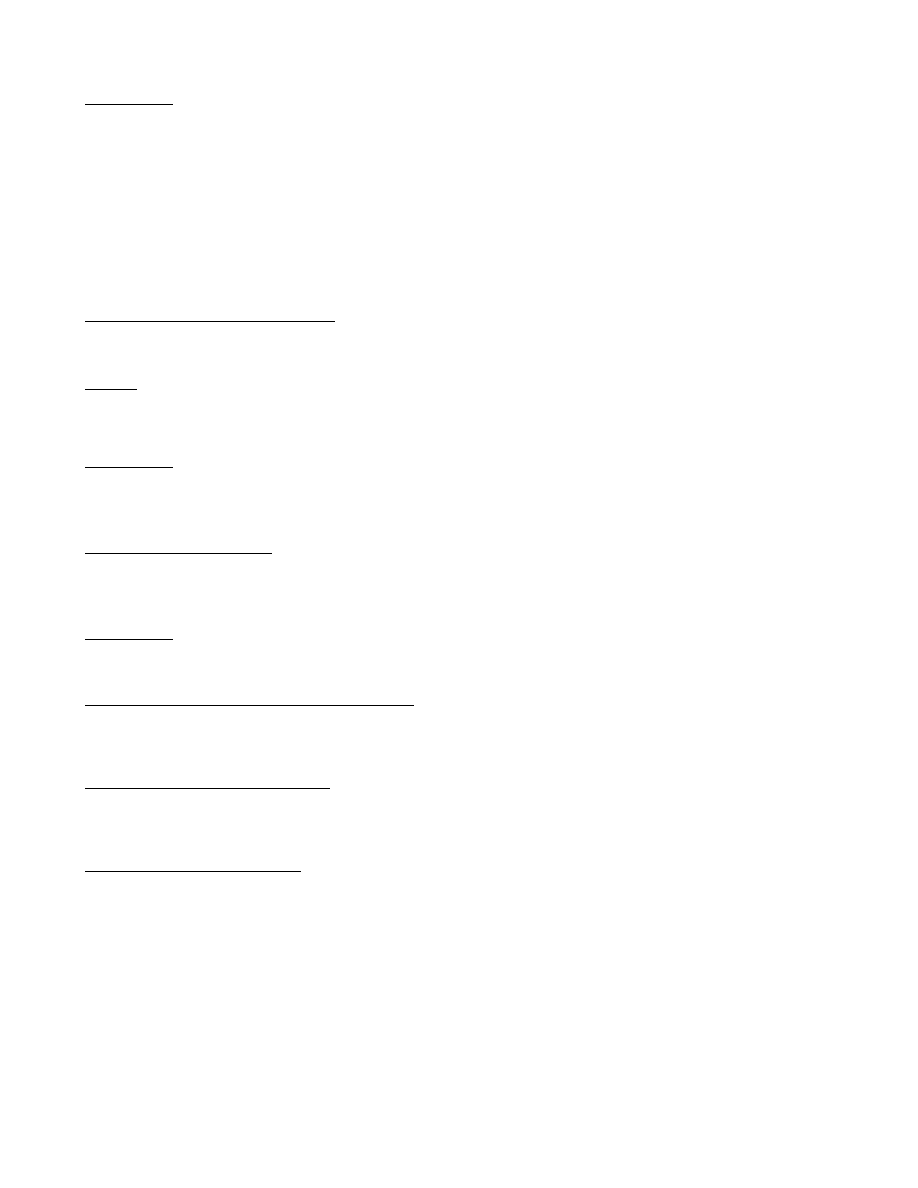
Definicja (macierz)
Rozważmy dwa podzbiory zbioru N (liczb naturalnych):
}
{
p
X
,
,
2
,
1 K
=
,
oraz zbiór
. Macierzą o p wierszach oraz s kolumnach nazywamy funkcję
}
{
s
Y
,
,
2
,
1 K
=
C
K
⊂
K
Y
X
→
×
:
Μ
.
Dla
oraz
przyjmujemy
X
i
∈
Y
j
∈
ij
m
j
i
=
)
,
(
M
.
Macierz zapisujemy w postaci tabeli
]
[
ij
m
=
M
.
Jeśli,
to macierz nazywamy kwadratową.
s
p
=
Liczby
nazywamy wyrazami macierzy
.
ij
m
M
Macierz
nazywamy
]
[
ij
m
−
=
− M
przeciwną do
]
[
ij
m
=
M
.
Macierz dla której wszystkie wyrazy są zerami nazywamy zerową i oznaczamy .
Θ
Macierz kwadratową dla której
oraz
a
m
ii
=
0
=
ij
m
dla i
j
≠ nazywamy diagonalną.
Jeśli
, to macierz nazywamy jednostkową i oznaczamy
I
.
1
=
a
Macierz
dla której
nazywamy
]
[
ij
m
M
=
ji
ij
m
m
=
symetryczną, a taką dla której
-
ji
ij
m
m
−
=
antysymetryczną.
Zbiór wszystkich macierzy o p wierszach i s kolumnach oznaczamy
.
ps
M
Niech
oraz
.
ps
,
M
B
A
∈
K
x
∈
Definicja (suma macierzy)
Sumą macierzy
nazywamy macierz
B
A
⊕
]
[
ij
c
=
C
taką, że
ij
ij
ij
b
a
c
+
=
gdzie
,
]
[
ij
a
=
A
]
[
ij
b
=
B
.
Definicja (iloczyn macierzy przez skalar)
Iloczynem macierzy
A
przez skalar
x (symbolicznie
A
⋅
x
) nazywamy macierz
taką, że
.
]
[
ij
d
=
D
ij
ij
a
x
d
⋅
=
Twierdzenie
Struktura
(
jest przestrzenią liniową.
*)
,
,
,
K
ps
⊕
M
Definicja (macierz transponowana)
Macierzą transponowaną do macierzy
]
[
ij
a
=
A
nazywamy macierz
taką, że
.
]
[
ij
T
x
=
A
ji
ij
a
x
=
Definicja (iloczyn macierzy)
Niech
oraz
B
,
i
nk
M
A
∈
kp
M
∈
]
[
ij
a
=
A
]
[
ij
b
=
B
. Iloczynem
B
A
⋅
nazywamy macierz
]
[
ij
c
=
C
taką,
że
.
∑
=
•
=
k
t
tj
it
ij
b
a
c
1
4
Twierdzenie
Struktura
(
jest pierścieniem nieprzemiennym
z jedynką.
)
,
,
⋅
+
pp
M
Uwaga
Jedynką tego pierścienia jest macierz jednostkowa.
Twierdzenie
Iloczyn macierzy diagonalnych jest macierzą diagonalną.
Definicja (macierz odwracalna)
Macierz
(kwadratową) nazywamy odwracalną, jeśli istnieje macierz
taka, że
. Macierz
nazywamy odwrotną do .
pp
M
A
∈
pp
M
A
∈
−1
I
A
A
A
A
=
=
−
−
o
o
1
1
1
−
A
A
Uwaga
Macierz kwadratowa ma co najwyżej jedną macierz odwrotną.
Twierdzenie
A
A
=
T
T
)
(
A
A
=
−
−
1
1
)
(
T
T
T
)
(
A
B
B
A
o
o
=
-1
-1
-1
)
(
A
B
B
A
o
o
=
T
T
T
)
(
B
A
B
A
⊕
=
⊕
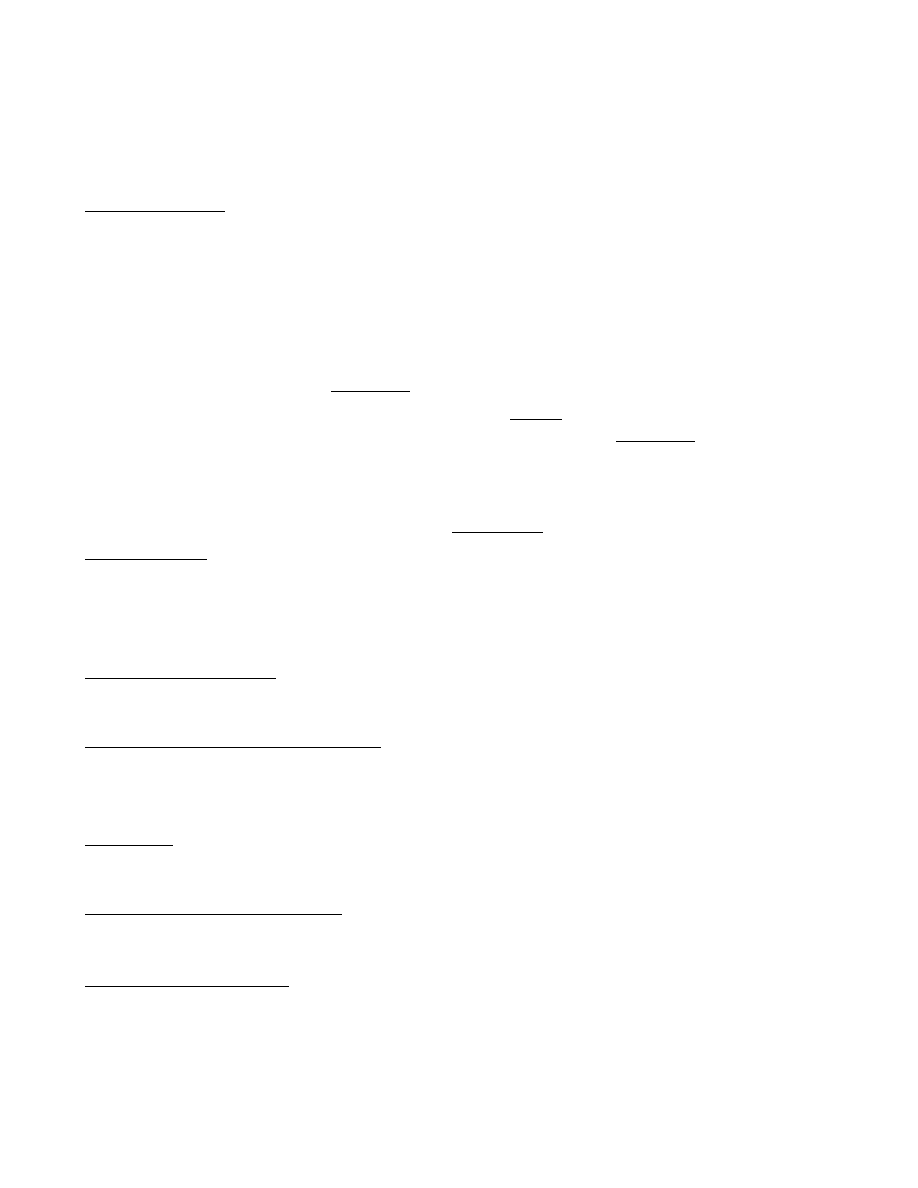
Definicja (wyznacznik)
Wyznacznikiem macierzy kwadratowej
pp
M
A
∈
(oznaczenia detA lub |A|).
nazywamy dla
p=1
]
[
11
a
=
A
11
det
a
=
A
p>1
gdzie
]
[
ij
a
=
A
A
A
*
1
1
1
det
t
p
t
t
a
∑
=
=
ij
j
i
ij
A
A
det
)
1
(
*
+
−
=
- jest to algebraiczne dopełnienie
. Macierz
jest to macierz powstała z A
przez skreślenie i-tego wiersza oraz j-tej kolumny. Wyznacznik
nazywamy minorem stopnia
pierwszego macierzy A.
ij
a
ij
A
ij
A
det
Twierdzenie Laplace’a: Niech A
∈M
nn
oraz
⎩
⎨
⎧
≠
=
=
+
+
+
j
i
j
i
A
A
a
A
a
A
a
jn
in
j
i
j
i
0
det
...
*
*
2
2
*
1
1
⎩
⎨
⎧
≠
=
=
+
+
+
j
i
j
i
A
A
a
A
a
A
a
nj
ni
j
i
j
i
0
det
...
*
*
2
2
*
1
1
5
Własności wyznaczników
1. det A
T
= det A.
2. Jeżeli w wyznaczniku zamienimy miejscami dwa dowolne wiersze (kolumny), to wartość
wyznacznika zmieni się na przeciwną.
3. Aby wyznacznik pomnożyć przez liczbę należy wszystkie elementy dowolnego wiersza (kolumny)
pomnożyć przez tę liczbę.
4. Jeżeli w wyznaczniku wszystkie elementy znajdujące się nad (lub pod) diagonalą są równe zeru, to
wartość wyznacznika równa jest iloczynowi elementów diagonali. O takim wyznaczniku mówimy,
że ma postać trójkątną.
5. Jeżeli w wyznaczniku
a) wszystkie elementy pewnego wiersza (kolumny) są równe zeru lub
b) dwa wiersze (kolumny) są identyczne lub
c) wszystkie elementy pewnego wiersza ( kolumny ) są proporcjonalne do odpowiednich
elementów innego wiersza (kolumny) lub
d) pewien wiersz (kolumna) jest kombinacją liniową pozostałych wierszy (kolumn) , to wartość
wyznacznika równa jest zeru.
6. Jeżeli w wyznaczniku do elementów pewnego wiersza (kolumny) dodamy odpowiednie elementy
innego wiersza (kolumny) pomnożone przez jedną i tę samą liczbę, to wartość wyznacznika nie
ulegnie zmianie.
7. Wyznacznik jest różny od zera wtedy i tylko wtedy, gdy jego wiersze (kolumny) są liniowo
niezależne.
8. T
WIERDZENIE
C
AUCHY
'
EGO
. Jeżeli A i B są macierzami tego samego stopnia to
det(A·B) = detA·detB
Definicja (macierz nieosobliwa)
Macierz A nazywamy nieosobliwą jeśli
0
det
≠
A
.
Twierdzenie
Macierz jest odwracalna wtedy i tylko wtedy gdy jest nieosobliwa.
Definicja
Macierz A nazywamy ortogonalną jeśli
.
T
1
A
A
=
−
Twierdzenie
Jeśli A jest ortogonalna to
1
det
=
A
oraz
jest ortogonalna.
1
−
A
Definicja
Niech
,
nn
M
A
∈
[ ]
ij
a
=
A
,
,
[ ]
i
x
=
X
1
n
M
X
∈
,
[ ]
ij
b
=
B
,
1
n
M
B
∈
.Wówczas układ równań AX=B
nazywamy układem Cramera jeśli A jest nieosobliwa.
Twierdzenie Cramera
Jeżeli układ n równań liniowych o n niewiadomych, ma nieosobliwą macierz A współczynników przy
niewiadomych, to układ ten ma jedyne rozwiązanie dane wzorami Cramera
,
,
...
,
2
,
1
,
det
n
i
dla
A
A
x
i
i
=
=
6
gdzie A
i
jest wyznacznikiem powstałym z wyznacznika macierzy A, przez zastąpienie w nim kolumny
współczynników przy niewiadomej x
i
kolumną wyrazów wolnych.
Układ równań Cramera jest oznaczony.
Definicja (liniowa kombinacja)
Jeśli V jest przestrzenią liniową nad ciałem liczbowym K oraz
V
n
∈
α
α
β
,
,
,
1
L
to mówić będziemy, że
β jest liniową kombinacją wektorów
n
α
α
,
,
1
L
jeśli istnieją skalary
takie,
że
.
K
a
a
n
∈
,
,
1
L
i
n
i
i
a
α
β
∑
=
=
1
Definicja (wektory liniowo zależne)
Wektory
V
n
∈
α
α
,
,
1
L
nazywamy liniowo zależnymi jeśli istnieje ich liniowa kombinacja
o współczynnikach nie znikających jednocześnie, równa wektorowi zerowemu.
Wektory, które nie są liniowo zależne nazywamy liniowo niezależnymi.
Definicja
Zbiór wszystkich liniowych kombinacji wektorów
n
α
α
,
,
1
L
przestrzeni liniowej V jest przestrzenią
liniową (podprzestrzenią liniową V), oznaczamy ją
{
}
(
)
n
lin
α
α
,
,
1
L
.
Definicja (baza p-ni liniowej)
Bazą przestrzeni liniowej V nazywamy układ liniowo niezależnych wektorów
V
n
∈
α
α
,
,
1
L
taki, że
{
}
(
)
n
lin
V
α
α
,
,
1
L
=
.
Moc bazy nazywamy wymiarem V i oznaczamy dimV. Jeśli baza jest skończona (nieskończona)
mówimy, że V jest skończenie (nieskończenie) wymiarowa.
Definicja (rząd macierzy)
Niech
mówimy, że rzędem macierzy A jest liczba t, rzA = t jeśli istnieje minor macierzy A
stopnia t, różny od zera oraz każdy minor stopnia większego niż t jest równy zero.
nm
M
A
∈
Twierdzenie
Niech
oraz
oznaczają kolumny A
nm
M
A
∈
m
K
K
,
,
1
K
[
]
(
)
m
K
K
A
,
,
1
K
=
to
{
}
(
)
m
K
K
lin
rz
,
,
dim
1
K
=
A
Własności rzędu macierzy
Poniższe operacje nie zmieniają rzędu macierzy (chociaż zmieniają samą macierz):
1. transpozycja
2. odrzucenie wiersza (kolumny) złożonego z samych zer
3. pomnożenie lub podzielenie wszystkich elementów pewnego wiersza (kolumny) przez tę samą
liczbę różną od zera
4. dodanie do elementów pewnego wiersza (kolumny) odpowiednich elementów innego wiersza
(kolumny) pomnożonych przez tę samą liczbę
5. dodanie do elementów pewnego wiersza (kolumny) kombinacji liniowej odpowiednich elementów
pozostałych wierszy (kolumn)
6. odrzucenie jednego z dwóch wierszy (kolumn) o odpowiednich elementach proporcjonalnych
7. odrzucenie wiersza (kolumny) będącego kombinacją liniową pozostałych wierszy (kolumn).
7

Twierdzenie Kroneckera Capelliego
Niech
,
, B
wówczas układ równań liniowych AX=B ma rozwiązanie wtedy i
tylko wtedy gdy rzA=rz[A|B] gdzie [A|B] jest to macierz uzupełniona, powstała z A przez dopisanie do
niej kolumny B (wyrazów wolnych) jako ostatniej.
nm
M
A
∈
1
m
M
X
∈
1
n
Μ
∈
Definicja (układ jednorodny)
Układ równań liniowych AX= Θ nazywamy jednorodnym.
Twierdzenie
{
}
Zbiór
Θ
AX
=
∈
=
:
n
K
x
W
jest przestrzenią liniową ( podprzestrzenią liniową
n
K ). Jej bazę
nazywamy fundamentalnym układem rozwiązań równania jednorodnego AX= Θ .
Twierdzenie
Jeżeli
{
}
n
α
α
,
,
1
L
jest bazą przestrzeni liniowej V nad ciałem liczbowym K to dla każdego wektora
V
∈
β
istnieje dokładnie jeden ciąg skalarów
(
)
K
a
a
n
⊂
,
,
1
K
taki, że
ciąg
nazywamy współrzędnymi
i
n
i
i
a
α
β
∑
=
=
1
(
)
n
a
a
,
,
1
K
β w bazie
{
}
n
α
α
,
,
1
L
.
Twierdzenie
Każda niezerowa przestrzeń liniowa ma co najmniej jedną bazę i jednoznacznie wyznaczony wymiar.
Każdy układ liniowo niezależny wektorów V można uzupełnić do bazy przestrzeni liniowej V.
Definicja
Rozważmy przestrzeń liniową
n
K złożoną z n-elementowych ciągów o wyrazach z ciała liczbowego
K. Układ wektorów
takich, że
K
e
e
n
∈
,
,
1
K
(
)
0
,
0
,
1
,
0
,
,
0
L
K
=
i
e
(na i-tym miejscu jest 1) stanowi
bazę
n
K . Nazywamy ją bazą kanoniczną.
Twierdzenie
Wektory
stanowią bazę
n
n
K
∈
α
α
,
,
1
L
n
K wtedy i tylko wtedy gdy
[
]
0
,
,
det
1
≠
n
α
α
K
.
Definicja
Macierzą przejścia od bazy kanonicznej
n
K do nowej bazy
nazywamy macierz
n
n
K
∈
α
α
,
,
1
L
[
n
]
α
α
,
,
1
K
=
B
, której kolumnami są wektory
n
α
α
,
,
1
L
. Macierz B jest nieosobliwa.
Jeżeli
i jest zapisany w bazie kanonicznej oraz
n
K
∈
α
α
′ oznacza ten sam wektor zapisany w nowej
bazie
to zachodzi wzór:
, gdzie
n
n
K
∈
α
α
,
,
1
L
α
α
1
−
=
′ B
1
,
n
M
∈
′
α
α
.
Definicja (przestrzeń afiniczna)
Niech dana będzie przestrzeń liniowa V
(
)
∗
⊕ ,
,
,
K
V
nad ciałem liczbowym K, zbiór
∅
≠
E
oraz
funkcja
V
E
E
→
×
:
ω
taka, że
1)
(
)
α
ω
α
=
∈
∈
∈
∨
∧
∧
B
A
E
B
V
E
A
,
!
2)
(
)
(
)
(
)
C
A
C
B
B
A
E
C
B
A
,
,
,
,
,
ω
ω
ω
=
⊕
∈
∧
8
to strukturę
(
)
ω
,
,V
E
nazywamy przestrzenią afiniczną stowarzyszoną z przestrzenią liniową V.
Elementy E nazywamy punktami .
Jeśli przyjąć oznaczenia
(
)
AB
B
A
=
,
ω
to warunki 1) i 2) można zapisać:
1)
α
α
=
∈
∈
∈
∨
∧
∧
AB
E
B
V
E
A
!
2)
AC
BC
AB
E
C
B
A
=
⊕
∈
∧
,
,
.
Własności:
(
)
0
,
=
∈
∧
A
A
E
A
ω
(
)
(
)
A
B
B
A
E
B
A
,
,
.
ω
ω
−
=
∈
∧
Definicja (przesunięcie przestrzeni afinicznej)
Jeśli
V
E
A
∈
∈
α
,
to istnieje jeden
E
B
∈
taki, że
(
)
α
ω
=
B
A,
. Punkt
B
nazywamy sumą punktu
A
i
wektora
α
:
α
+
A
. Jeśli ustalimy
V
∈
α
to odwzorowanie
takie, że
E
E
f
→
:
α
+
=
∈
∧
A
A
f
E
A
)
(
nazywamy przesunięciem przestrzeni afinicznej
E
o wektor
α
.
Twierdzenie
Jeśli dany jest układ równań liniowych
B
AX
=
nm
M
A
∈
,
1
m
M
X
∈
,
1
n
M
B
∈
o wyrazach z ciała
liczbowego K,
oraz stowarzyszony z nim układ jednorodny
[
B
A
A
:
rz
rz
=
]
Θ
AX
= oraz
{
}
B
AX
=
∈
=
:
m
K
X
H
,
,
H
p
∈
0
{
}
Θ
AX
=
∈
=
:
m
K
X
W
, to
W
p
H
+
=
0
.
GEOMETRIA !!!
Wektory w przestrzeni R
n
.
Długość wektora a którą oznaczać będziemy
| a | wyraża się wzorem
|a| =
a
i
i
n
2
1
=
∑
,
Kątami kierunkowymi wektora a nazywamy kąty
ϕ
i
jakie wektor a tworzy z kolejnymi osiami układy współrzędnych,
zaś kosinusy tych kątów nazywamy kosinusami kierunkowymi wektora a. Kosinusy kierunkowe wektora a określają
wzory
cos
| |
,
, ,.
ϕ
i
i
a
dla i
n
=
=
a
1 2 .., ,
Suma kwadratów kosinusów kierunkowych dowolnego wektora równa jest jedności.
cos
.
2
1
1
ϕ
i
i
n
=
∑
=
Wektory w przestrzeni R
3
.
W przestrzeni R
3
wektor ma postać a = [a
x
,a
y
,a
z
]
T
, gdzie
.
R
a
,
a
,
a
z
y
x
∈
a
×b = [a
x
,a
y
,a
z
]
T
× [b
x
, b
y
,b
z
]
T
=
i
j
k
a
a
a
b
b
b
x
y
z
x
y
z
.
Równoległość i prostopadłość wektorów
9
a
b
a
b
a
b
1
1
2
2
3
3
=
=
⇒ a b
||
a
⊥β ⇔ a
1
b
1
+ a
2
b
2
+ a
3
b
3
= 0.
Iloczyn mieszany wektorów.
(a
×b)c =
a
a
b
b
c
a
a
b
b
c
a
a
b
b
c
a
a
a
b
b
b
c
c
c
y
z
y
z
x
x
z
x
z
y
x
y
x
y
z
x
y
z
x
y
z
x
y
z
−
+
=
.
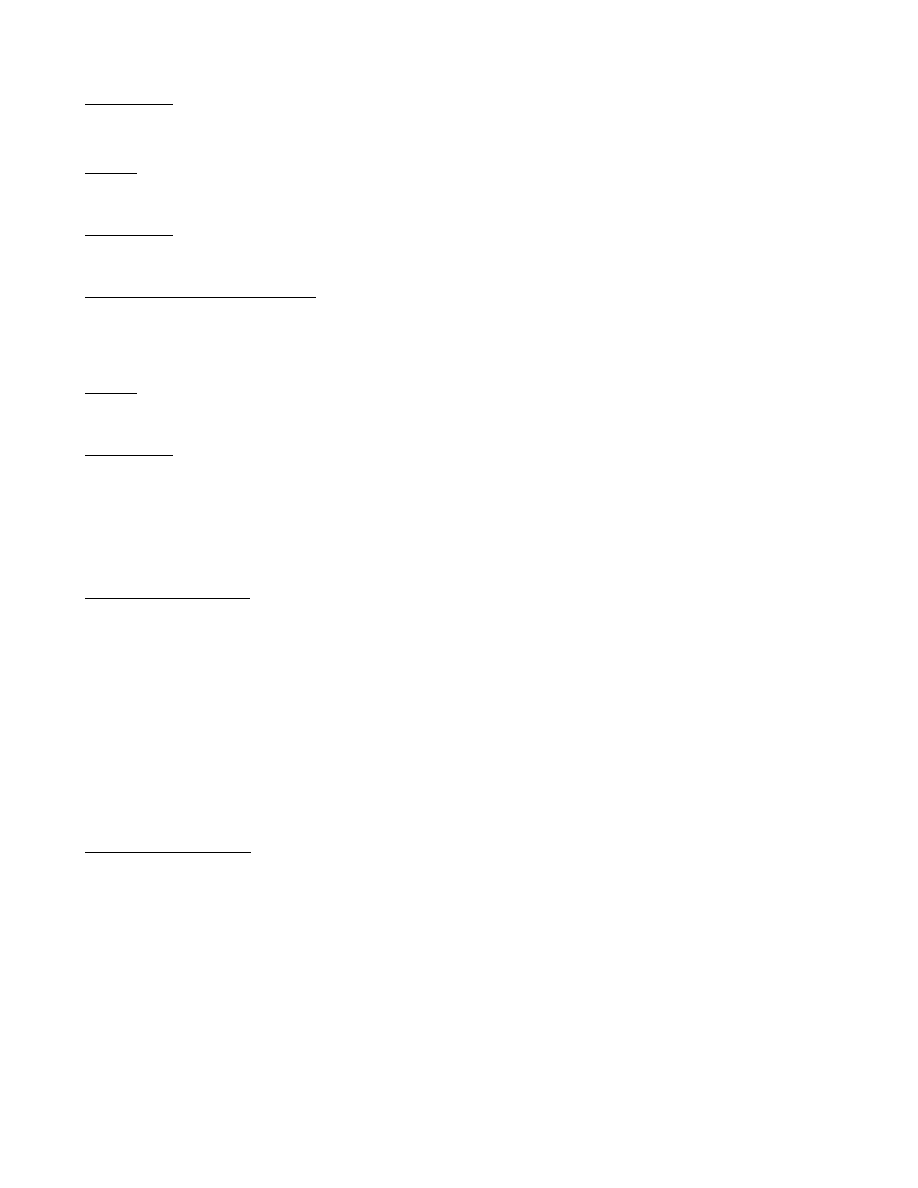
Płaszczyzna i prosta.
Równania parametryczne płaszczyzny. Niech P(x,y,z) będzie dowolnym punktem płaszczyzny π, . Zatem wektory
[x-x
P P
0
→
=
0
,y-y
0
,z-z
0
]
T
oraz u i v są komplanarne,
a to oznacza, że są liniowo zależne. Istnieją więc stałe t i s takie, że
tu + sv, gdzie t,s
∈R.
P P
0
→
=
x
x
u t
v
y
y
u t
v
z
z
u t
v
x
x
y
z
z
=
+
+
=
+
+
=
+
+
⎧
⎨
⎪
⎩
⎪
0
0
0
,
s
s
s
y
gdzie t,s
∈R.
Te równania skalarne nazywamy równaniami parametrycznymi płaszczyzny.
Równanie ogólne płaszczyzny.
x x
y y
z z
u
u
u
v
v
v
x
y
z
x
y
z
−
−
−
=
0
0
0
0.
Równaniu temu można nadać postać
A(x-x
0
) + B(y-y
0
) + C(z-z
0
) = 0 (*)
lub Ax + By + Cz + D = 0.
Ostatnie równanie nazywamy równaniem ogólnym płaszczyzny.
Weźmy pod uwagę wektor n = [A,B,C]
T
. Łatwo zauważyć, że jest on iloczynem wektorowym wektorów u i v :
n = u
× v =
i
j
k
u
u
u
v
v
v
x
y
z
x
y
z
= [A,B,C]
T
Wektor n = [A,B,C]
T
nazywamy wektorem normalnym płaszczyzny
π. .
L.p
. wektor n
równanie
położenie płaszczyzny
1. A=0
By + Cz + D = 0
równoległa do osi Ox
2. =B=0
Ax + Cz + D = 0
równoległa do osi Oy
3. C=0
Ax + By + D =0
równoległa do osi Oz
4. D=0
Ax + By + Cz =0
zawiera początek układu współrzędnych
5. A=B=0
Cz + D = 0 lub z=c prostopadła do osi Oz, równoległa do plaszcz. Oxy
10
6. A=C=0
By + D = 0 lub y=b prostopadła do osi Oy, równoległa do plaszcz. Oxz
7. B=C=0
Ax + D = 0 lub x=a prostopadła do osi Ox, równoległa do plaszcz. Oyz
8. A=D=0
By + Cz = 0
zawiera oś Ox
9. B=D=0
Ax + Cz = 0
zawiera oś Oy
10. C=D=0
Ax + By = 0
zawiera oś Oz
11. A=B=D=0 z = 0
równanie płaszczyzny Oxy
12. A=C=D=0 y = 0
równanie płaszczyzny Oxz
13. B=C=D=0 x = 0
równanie płaszczyzny Oyz
A
A
B
C
x
B
A
B
C
y
C
A
B
C
z
D
A
B
C
2
2
2
2
2
2
2
2
2
2
2
2
0
+
+
+
+
+
+
+
+
+
+
+
= ,
Z równania normalnego łatwo można otrzymać wzór na odległość dowolnego punktu P
0
(x
0
,y
0
,z
0
) od płaszczyzny
określonej równaniem normalnym
d
x
y
z
x
y
z
=
⋅
+
⋅
+
⋅
−
cos
cos
cos
ϕ
ϕ
ϕ
0
0
0
p
lub od płaszczyzny określonej równaniem ogólnym
d
Ax
By
Cz
D
A
B
C
=
+
+
+
+
+
|
|
.
0
0
0
2
2
2
x
p
y
q
z
r
+ + = 1.
Jest to równanie odcinkowe płaszczyzny.
Wzajemne położenie dwóch płaszczyzn
Rząd macierzy
Układ równań, liczba param.
Położenie płaszczyzn
r(A)
≠r(U)
Sprzeczny płaszczyzny są równoległe
r(A)=r(U)=1 nieoznaczony,
p = n-r = 2
płaszczyzny pokrywają się
r(A)=r(U)=2 1
nieoznaczony, p = n-r = 1
płaszczyzny mają wspólną prostą
Równania parametryczne prostej l.
,
R
t
gdzie
,
ct
z
z
bt
y
y
at
x
x
0
0
0
∈
⎪
⎩
⎪
⎨
⎧
+
=
+
=
+
=
Równania kierunkowe prostej
x x
a
y y
b
z z
c
−
=
−
=
−
0
0
.
0
Równania krawędziowe prostej.
jest
A x
B y
C z
D
A x
B y
C z
D
1
1
1
1
2
2
2
2
0
0
+
+
+
=
+
+
+
=
⎧
⎨
⎩
A
A
B
B
C
C
D
D
1
2
1
2
1
2
1
2
≠
≠
lub
,
Wzajemne położenie dwóch prostych.
Dane są dwie proste l
1
i l
2
R.
s
,
s
c
z
z
s
b
y
y
s
a
x
x
l
R,
t
,
t
c
z
z
t
b
y
y
t
a
x
x
l
2
2
2
2
2
2
2
1
1
1
1
1
1
1
∈
⎪
⎩
⎪
⎨
⎧
+
=
+
=
+
=
≡
∈
⎪
⎩
⎪
⎨
⎧
+
=
+
=
+
=
≡
11
wektory są równoległe
wektory nie są równoległe
proste mają punkt wspólny
proste pokrywają się proste
przecinają się
proste nie mają punktu wspólnego
proste równoległe proste
są skośne
Pęk płaszczyzn
λ
1
(A
1
x+B
1
y+C
1
z+D
1
)+
λ
2
(A
2
x+B
2
y+C
2
z+D
2
)
= 0
Definicja (przekształcenie liniowe)
Niech
,
będą przestrzeniami liniowymi nad ciałem liczbowym K. Przekształcenie
takie, że
V W
W
V
f
→
:
(
)
( )
( )
y
bf
x
af
by
ax
f
K
b
a
V
y
x
+
=
+
∈
∈
∧
∧
,
,
nazywamy przekształceniem liniowym.
Jeśli
(
n
)
α
α
,
,
1
K
jest bazą
oraz
(
V
)
m
β
β
,
,
1
K
jest bazą
, to macierz
W
A
której kolumnami są
odpowiednio współrzędne wektorów
( )
( )
n
f
f
α
α
,
,
1
K
w bazie
(
)
m
β
β
,
,
1
K
nazywamy macierzą
przekształcenia w ustalonych bazach. W zapisie macierzowym oznacza to że
f
( )
X
A
X
f
⋅
=
.
Definicja (jądro i obraz przekształcenia g)
Jeśli
jest przekształceniem liniowym
, to zbiór
g
W
V
g
→
:
( )
{
}
0
:
=
∈
=
x
g
V
x
g
Ker
nazywamy
jądrem . Zbiór ten jest przestrzenią liniową (podprzestrzenią liniową
), a
nazywamy
defektem i oznaczamy
.
g
V
g
Ker
dim
g
df
Zbiór
( )
{
}
v
g
w
W
w
g
V
v
=
∈
=
∈
∨
:
Im
nazywamy obrazem . Ten zbiór również jest przestrzenią liniową
(podprzestrzenią liniową W ),
nazywamy rzędem przekształcenia i oznaczamy
.
g
g
Im
dim
g
g
rz
Twierdzenie
Odwzorowanie
jest różnowartościowe wtedy i tylko wtedy gdy
. Ponadto
oraz
, gdzie jest macierzą w dowolnych bazach.
g
0
=
g
df
V
g
df
g
rz
dim
=
+
A
rz
g
rz
=
A
g
Twierdzenie
Niech
oraz będzie macierzą przekształcenia przy ustalonych bazach
oraz
. Jeśli
jest macierzą przejścia od bazy
do nowej bazy
natomiast C jest macierzą przejścia od
do nowej bazy
, to macierzą w bazach
i
jest macierz postaci:
W
V
g
→
:
A
V
B
W
B
B
V
B
∗
V
B
W
B
∗
W
B
g
∗
V
B
∗
W
B
D
AB
C
D
1
−
=
.
Definicja (wyznacznik macierzy przekształcenia)
Jeśli przekształcenie liniowe
, to wyznacznikiem
V
V
g
→
:
g
,
nazywamy wyznacznik macierzy
przekształcenia w dowolnych bazach.
g
det
Definicja (podprzestrzeń liniowa niezmiennicza)
Niech
V
V
→
:
ϕ
. Podprzestrzeń liniową
nazywamy niezmienniczą względem odwzorowania
liniowego
V
W
⊂
ϕ jeśli
( )
.
W
W
⊂
ϕ
Twierdzenie
{ }
( )
α
lin
=
W
jest niezmiennicza, to istnieje skalar
K
a
∈ taki, że
( )
av
v
V
v
=
∈
∧
ϕ
.
Jeśli
12
Definicja (wektor własny , wartość własna)
Wektor
V
∈
α
nazywamy wektorem własnym względem odwzorowania liniowego
V
V
→
:
ϕ
jeśli
θ
α
≠ oraz
{ }
( )
α
lin
W
=
jest podprzestrzenią niezmienniczą względem
ϕ . Skalar
taki, że
K
a
∈
( )
av
v
W
v
=
∈
∧
ϕ
nazywamy wartością własną.
Definicja (macierz charakterystyczna, wielomian charakterystyczny, równanie charakterystyczne)
Jeśli
jest macierzą przekształcenia liniowego
A
V
V
→
:
ϕ
, to macierz
nazywamy macierzą
charakterystyczną
I
A x
−
ϕ , wielomian
( )
(
)
I
A x
x
P
−
= det
nazywamy wielomianem charakterystycznym
ϕ ,
a równanie
nazywamy równaniem charakterystycznym
( )
0
=
x
P
ϕ .
Twierdzenie
Wielomian charakterystyczny nie zależy od wyboru bazy.
Twierdzenie
Na to by liczba
K
∈
λ
była wartością własną przekształcenia liniowego
potrzeba i
wystarcza by
n
n
K
K
→
:
ϕ
( )
0
=
λ
P
.
Twierdzenie
Zbiór wektorów własnych
o wartości własnej
n
n
K
K
→
:
ϕ
K
∈
λ
uzupełniony o wektor zerowy jest
niezmienniczą przestrzenią liniową , oznaczamy ją
,
λ
L
(
)
I
A x
rz
n
L
−
−
=
λ
dim
, gdzie - macierz
przekształcenia.
A
Twierdzenie
Jeśli
wektory własne przekształcenia liniowego
mają różne wartości własne, to
są liniowo niezależne.
n
x
x
,
,
1
K
n
n
K
K
→
:
ϕ
Twierdzenie
Jeśli
ma n różnych wartości własnych
n
n
K
K
→
:
ϕ
n
λ
λ
,
,
1
K
oraz dla
{
}
n
i
,
,
2
,
1 K
∈
jest wektorem
własnym o wartości własnej
i
x
i
λ
, to
tworzą bazę
n
x
x
,
,
1
K
n
K . W bazie tej
ϕ ma macierz diagonalną ,
której główną przekątną (diagonalę) tworzą liczby
n
λ
λ
,
,
1
K
.
Twierdzenie. Jeśli
ma n liniowo niezależnych wektorów własnych, to macierz której
kolumnami są kolejne wektory własne
nazywamy diagonalizującą
. Macierz
jest
diagonalna.
nn
M
A
∈
C
A
A
AC
C
D
1
−
=
Twierdzenie Cayleye’a Hamiltona
Każda macierz kwadratowa spełnia swoje równanie charakterystyczne, traktowane jako równanie
macierzowe.
Definicja (forma liniowa)
Niech
,
n
R
V
=
R
- ciało liczb rzeczywistych,
(
)
n
α
α
,
,
1
K
- baza V . Odwzorowanie
R
V
V
f
→
×
:
takie, że
,
nazywamy formą liniową , gdzie
( )
∑
∧
=
∈
=
n
j
i
j
i
ij
V
y
x
y
x
a
y
x
f
1
,
,
,
R
a
ij
∈
(
)
j
i
ij
f
a
α
α
,
=
.
Macierz
[ ]
ij
a
=
A
nazywamy macierzą formy,
-rzędem formy,
- wyróżnikiem formy.
A
rz
A
det
Jeśli
to mówimy, że jest nieosobliwa.
0
det
≠
A
f
13
Jeśli
to mówimy, że jest symetryczna.
A
A
=
T
f
Definicja (forma kwadratowa)
Jeśli jest dwuliniową symetryczną formą, to funkcję
f
( )
( )
x
x
f
x
F
,
=
nazywamy formą kwadratową
formy dwuliniowej . Jeśli
to mówimy, że jest postaci kanonicznej.
f
( )
∑
=
=
n
i
i
ii
x
a
x
F
1
2
F
Każdą formę kwadratową można sprowadzić do postaci kanonicznej. Ilość współczynników dodatnich
w każdej postaci kanonicznej formy jest taka sama.
Definicja (forma dodatnio określona)
Formę
nazywamy dodatnio (ujemnie, niedodatnio, nieujemnie) określoną jeśli
(
).
R
R
R
F
n
n
→
×
:
{ }
( )
0
\
>
∈
∧
x
F
n
R
x
θ
0
,
0
,
0
≥
≤
<
Twierdzenie
Na to by
była dodatnio określona potrzeba i wystarcza by
R
R
R
F
n
n
→
×
:
1. minory główne macierzy formy
A
były dodatnie lub
2. wszystkie wartości własne macierzy formy były dodatnie lub
3.
, gdzie - jest pewną nieosobliwą macierzą.
C
C
A
T
=
C
Definicja (iloczyn skalarny, przestrzeń euklidesowa)
Formę dwuliniową symetryczną dodatnio określoną
R
V
V
→
×
:
ϕ
(V - przestrzeń liniowa nad
R
)
nazywamy iloczynem skalarnym , a strukturę
(
)
ϕ
,
, R
V
nazywamy przestrzenią euklidesową.
Twierdzenie
W każdej skończenie wymiarowej przestrzeni euklidesowej V można utworzyć bazę ortonormalną.
14
Document Outline
- Definicja (działanie wewnętrzne, struktura algebraiczna)
- Definicja (grupa)
- Definicja (pierścień)
- Definicja (ciało)
- Twierdzenie
- Definicja (ciało liczb zespolonych)
- Uwaga
- Twierdzenie
- Definicja (ciało liczbowe)
- Twierdzenie
- Twierdzenie (zasadnicze twierdzenie algebry)
- Definicja (struktury izomorficzne)
- Definicja (przestrzeń liniowa)
- Definicja (macierz)
- Twierdzenie
- Twierdzenie
- Uwaga
- Twierdzenie
- Twierdzenie
- Definicja (wyznacznik)
- oraz
- Własności wyznaczników
- Definicja (macierz nieosobliwa)
- Definicja
- Twierdzenie
- Definicja
- Twierdzenie Cramera
- Definicja (liniowa kombinacja)
- Definicja (wektory liniowo zależne)
- Definicja
- Definicja (rząd macierzy)
- Twierdzenie
- Własności rzędu macierzy
- Twierdzenie Kroneckera Capelliego
- Niech , , wówczas układ równań liniowych AX=B ma rozwiązanie wtedy i tylko wtedy gdy rzA=rz[A|B] gdzie [A|B] jest to macierz uzupełniona, powstała z A przez dopisanie do niej kolumny B (wyrazów wolnych) jako ostatniej.
- Definicja (układ jednorodny)
- Twierdzenie
- Twierdzenie
- Twierdzenie
- Definicja
- Twierdzenie
- Definicja
Wyszukiwarka
Podobne podstrony:
LOGIKA wyklad 5 id 272234 Nieznany
ciagi liczbowe, wyklad id 11661 Nieznany
AF wyklad1 id 52504 Nieznany (2)
Neurologia wyklady id 317505 Nieznany
ZP wyklad1 id 592604 Nieznany
CHEMIA SA,,DOWA WYKLAD 7 id 11 Nieznany
or wyklad 1 id 339025 Nieznany
II Wyklad id 210139 Nieznany
cwiczenia wyklad 1 id 124781 Nieznany
BP SSEP wyklad6 id 92513 Nieznany (2)
MiBM semestr 3 wyklad 2 id 2985 Nieznany
olczyk wyklad 9 id 335029 Nieznany
Kinezyterapia Wyklad 2 id 23528 Nieznany
AMB ME 2011 wyklad01 id 58945 Nieznany (2)
AWP wyklad 6 id 74557 Nieznany
PRAWO SPORTOWE Wyklady(1) id 38 Nieznany
AGH Wyklad 4 id 52883 Nieznany (2)
więcej podobnych podstron