Edward Osada
Wykłady z geodezji i geoinformatyki
3
Osnowy geodezyjne
UxLan
Wrocław 2010

Druk publikacji wykonano zgodnie z oryginałami tekstów, tablic i rysunków
dostarczonych przez autora w formacie PDF.
Wydawca nie ponosi odpowiedzialności za ich treść, formę i styl.
Copyright by Edward Osada, 2010
Redakcja:
Joanna Tyniów
Wydanie I
ISBN 978-83-60221-02-0
Zamówienia prosimy kierować pod adresem Wydawcy:
UxLan Firma Informatyczna Józef Osada
ul. Wiosenna 17a
53-017 Wrocław
tel. 509 338 665
lub e-mailem: josada2@orange.pl
Druk i oprawa:
GS MEDIA. SZYBKI DRUK CYFROWY
ul. Wałbrzyska 9E, 52-314 Wrocław
tel./fax (71) 788 27 99
e-mail: biuro@gsmedia.com.pl
www.gsmedia.com.pl
2

Spis tre
ś
ci
Wstęp
5
1. Wprowadzenie do rachunku wyrównawczego
7
1.1. Klasyfikacja błędów pomiarowych
7
1.2. Błędy systematyczne
8
1.3. Błędy przypadkowe
9
1.4. Wartość średnia
10
1.5. Średnia ważona
12
1.6. Średnia odporna
14
1.7. Rozkład normalny
17
1.8. Obserwacje zależne
20
1.9. Błąd funkcji obserwacji
25
2. Osnowy wysokościowe
53
2.1. Podział i klasyfikacja
53
2.2. Znaki punktów
57
2.3. Projektowanie
62
2.4. Pomiar
70
2.5. Wyrównanie sieci niwelacyjnej
80
2.6. Wpasowanie sieci do punktów dowiązania
93
2.7. Wpasowanie sieci do przystających punktów dowiązania
99
2.8. Dołączanie dodatkowych ciągów
105
2.9. Wyrównywanie sieci w czasie pomiaru
107
2.10. Wstępna analiza dokładności sieci
114
2.11. Wyrównanie sieci swobodnej
118
3. Osnowy poziome
127
3.1. Podział i klasyfikacja
127
3.2. Znaki punktów
133
3.3. Projektowanie
139
3.4. Pomiar
145
3.5. Wyrównanie wcięcia liniowego wielokrotnego
157
3.6. Wyrównanie wcięcia kątowo liniowego w przód
165
3.7. Wyrównanie wcięcia kątowo liniowego wstecz
173
3.8. Wyrównanie ciągu i sieci poligonowej
181
3.9. Wyrównanie sieci kątowo liniowej
193
3.10. Wpasowanie sieci do punktów dowiązania
208
3.11. Wpasowanie sieci do przystających punktów dowiązania
211
3.12. Wyrównywanie sieci w czasie pomiaru
212
3.13. Wstępna analiza dokładności sieci
216
3.14. Osnowa dwufunkcyjna
217
Literatura
223
3

4

Wst
ę
p
Geodezja jest nauką o pomiarach Ziemi, wykonywanych w celu:
wyznaczenia kształtu i ruchu obrotowego Ziemi,
•
wyznaczenia pola siły ciężkości i geoidy,
•
sporządzania map,
•
obsługi budownictwa,
•
obsługi gospodarki nieruchomościami.
•
zakładania Krajowego Systemu Informacji o Terenie, jako podstawy Infrastruktury
•
Informacji Przestrzennej w Polsce
Zagadnienia te są realizowane za pomocą:
technik pomiarowych geodezji kosmicznej i satelitarnej,
•
technik pomiarowych fotogrametrii satelitarnej, lotniczej i bliskiego zasięgu,
•
pomiarów przy użyciu tachimetrów, niwelatorów, skanerów i grawimetrów.
•
Książki Wykłady z geodezji i geoinformatyki zawierają treści programowe wykładane
na kierunku studiów geodezja i kartografia w zakresie geodezyjnych pomiarów
szczegółowych, geodezji fizycznej, satelitarnej i inżynieryjnej, astronomii geodezyjnej,
rachunku wyrównawczego, fotogrametrii i systemów informacji przestrzennej GIS.
Dotychczas ukazały się:
1. Niwelacja
elementy obsługi niwelatorów klasycznych i kodowych
•
zakładanie osnów pomiarowych wysokościowych
•
wykonywanie pomiarów wysokościowych
•
niwelacja punktów rozproszonych, siatkowa i profilów
•
2. Tachimetria
elementy obsługi tachimetrów
•
zakładanie osnów pomiarowych sytuacyjnych
•
wykonywanie pomiarów sytuacyjnych i wysokościowych
•
komputerowe kreślenie mapy zasadniczej
•
skanowanie, georeferencja i wektoryzacja mapy zasadniczej.
•
3. Osnowy geodezyjne
projektowanie, stabilizacja punktów, pomiar i wyrównanie osnów poziomych,
•
wysokościowych i dwufunkcyjnych
Opisy metod pomiarowych są ilustrowane przykładami liczbowymi w programach
komputerowych Mathcad, C-Geo, ArcGIS, TNTmips, Geomatica, PG-STEAMER
i innych.
Wrocław, październik 2010
5

6
Wprowadzenie
do rachunku
wyrównawczego
1
1.1. Klasyfikacja bł
ę
dów pomiarowych
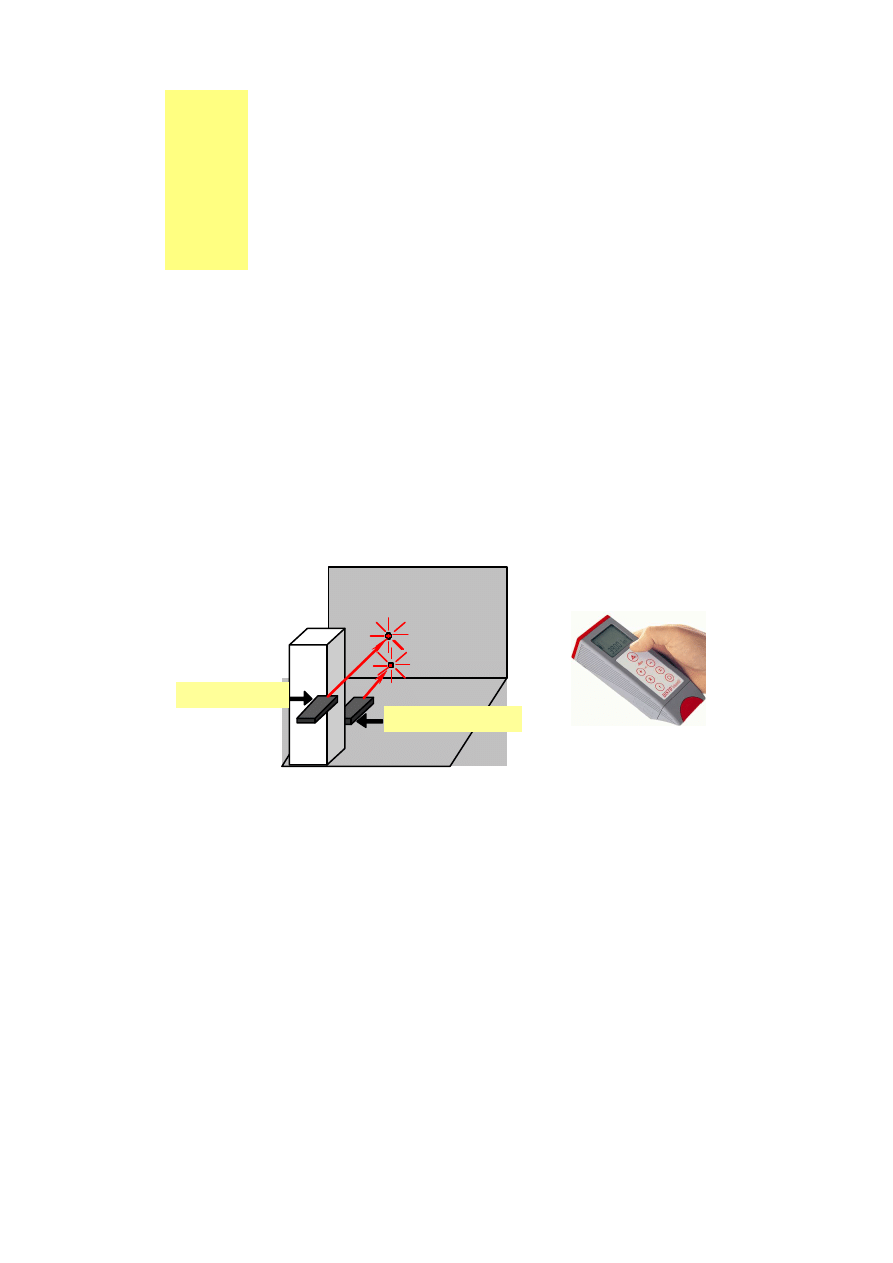
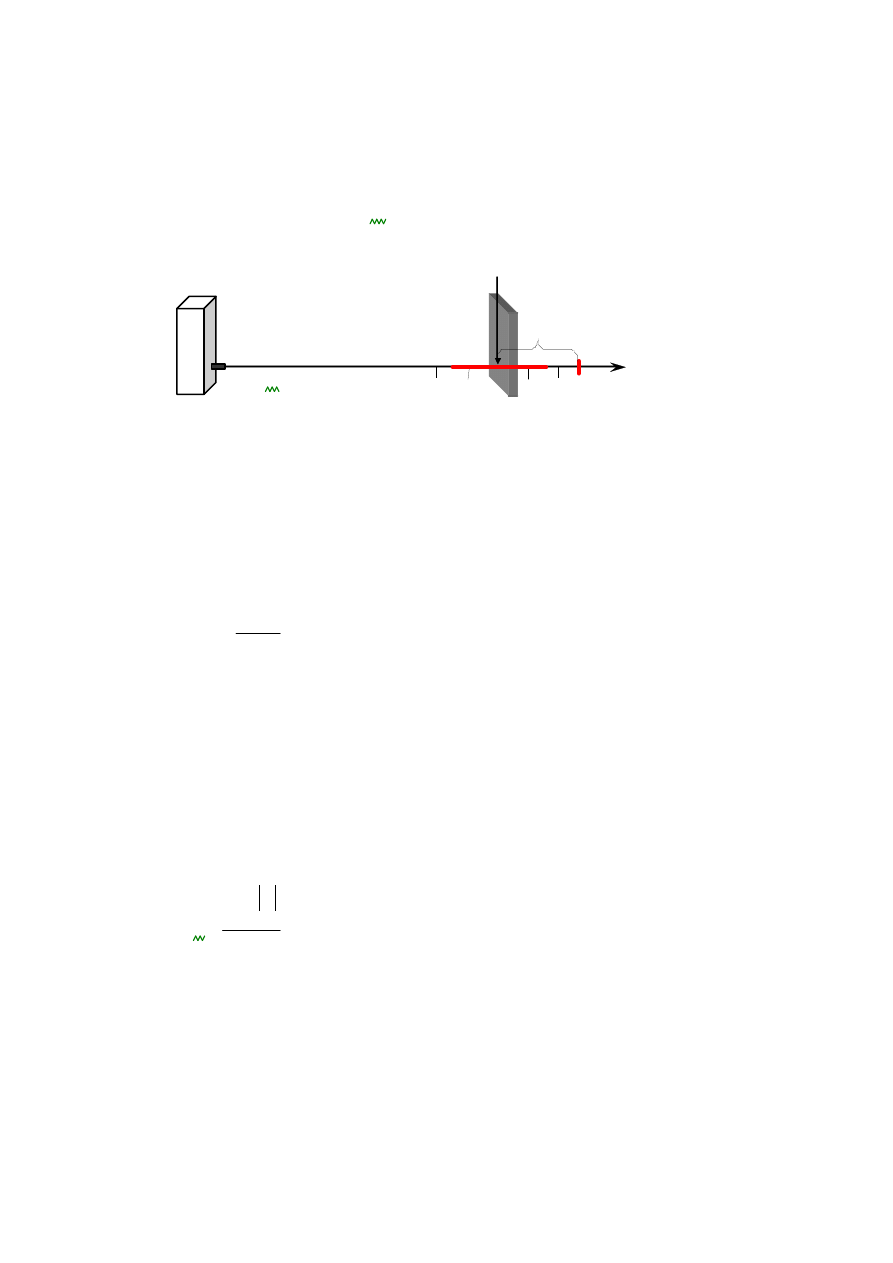
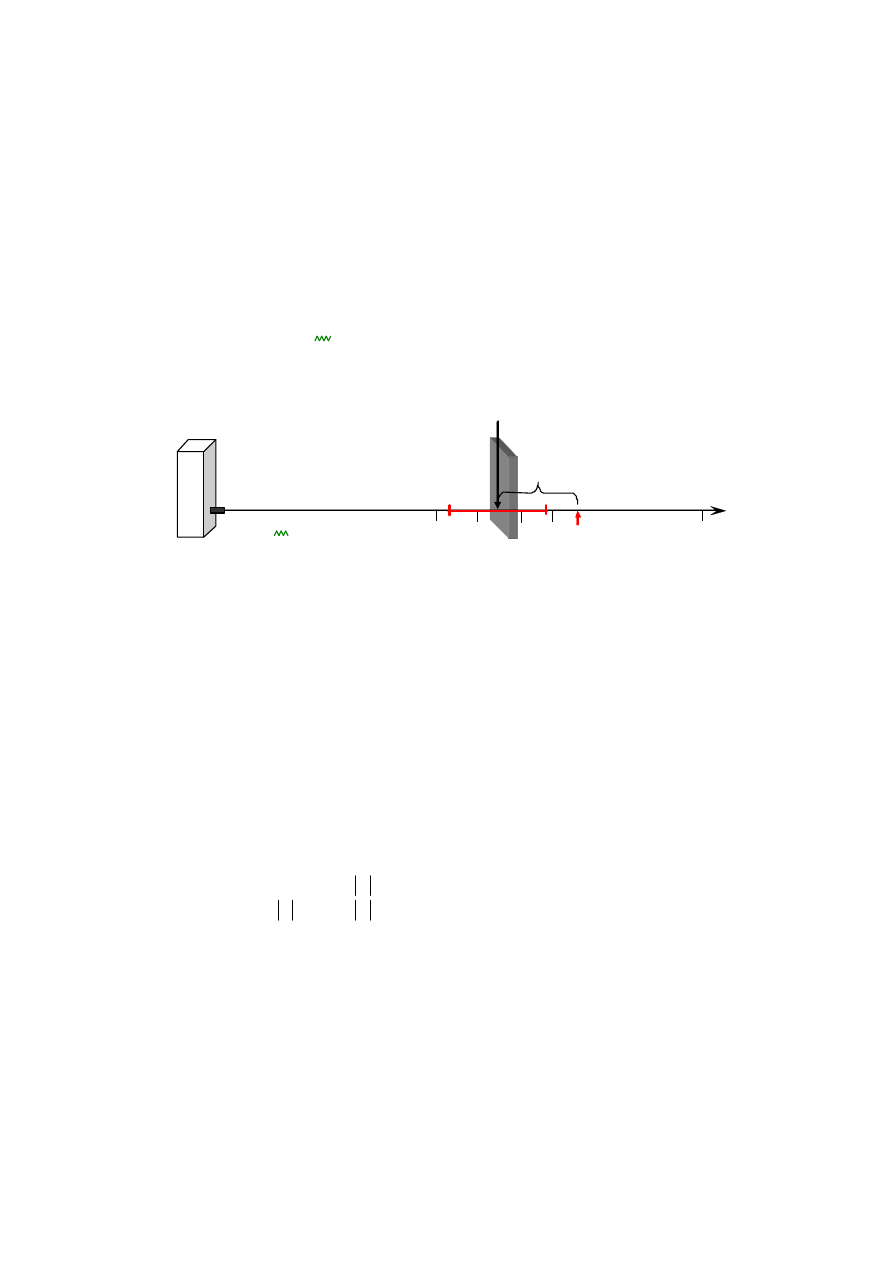
Pomiar
Pomiar jest czynnością mającą na celu wyznaczenie wartości danej wielkości fizycznej.
Podczas pomiaru dokonuje się porównania wartości mierzonej wielkości fizycznej
z wartością wzorcową, na przykład metra, kąta, temperatury itp. Wynikiem pomiaru jest
wskazanie narzędzia pomiarowego wyskalowanego w jednostkach miary mierzonej
wielkości - długości, kąta, temperatury itp. Przykładem są pomiary długości budynku,
jak również odległości między ścianami, posadzką a sufitem wykonywane za pomocą
ręcznego dalmierza laserowego (rys.1.1.1). W tym przypadku odległość d jest obliczana
na podstawie zależności 2d = ct gdzie c - prędkość światła, t - czas przebiegu promienia
ś
wietlnego od dalmierza do mierzonego punktu i z powrotem.
d = 4,006m
±
2mm
4,507m
±
2mm
DISTO
Leica DISTO
Rys. 1.1.1
Wyniki pomiarów mogą być obciążone błędami:
grubymi - zwykle są to omyłki podczas edycji wyników pomiarów,
•
systematycznymi - które można wyznaczyć i wyeliminować z wyników pomiarów:
•
- instrumentalne - wynikają z niedokładności wykonania narzędzi pomiarowych,
- środowiskowe - wynikają z wpływu środowiska,
przypadkowymi - których wielkości i znaku nie można wyznaczyć przed
•
wykonaniem pomiaru.
7
1.2. Bł
ę
dy systematyczne
Bł
ę
dy systematyczne instrumentalne i
ś
rodowiskowe
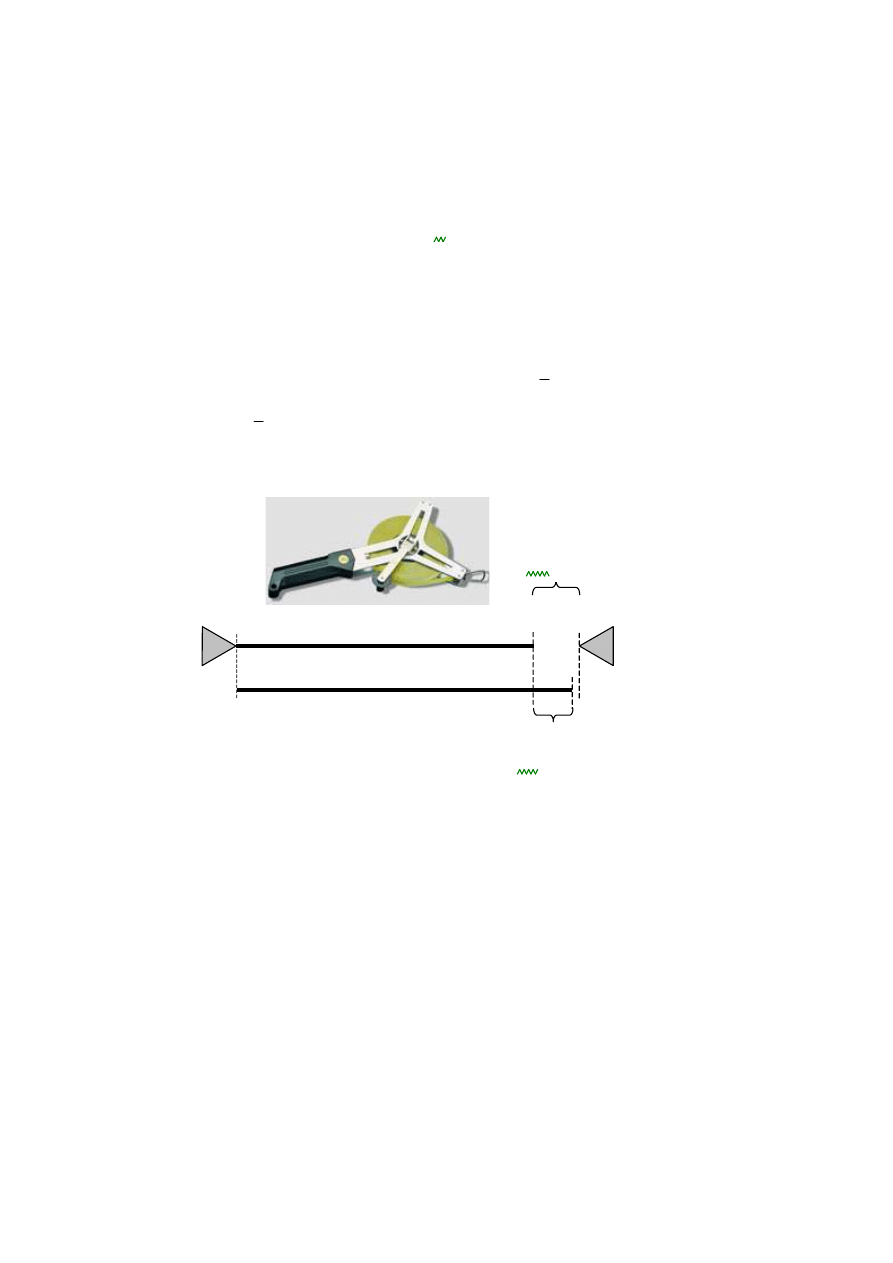
Wyniki pomiarów są zwykle obciążone błędami systematycznymi, wynikającymi
z niedokładności wykonania narzędzi pomiarowych jak również wpływu środowiska.
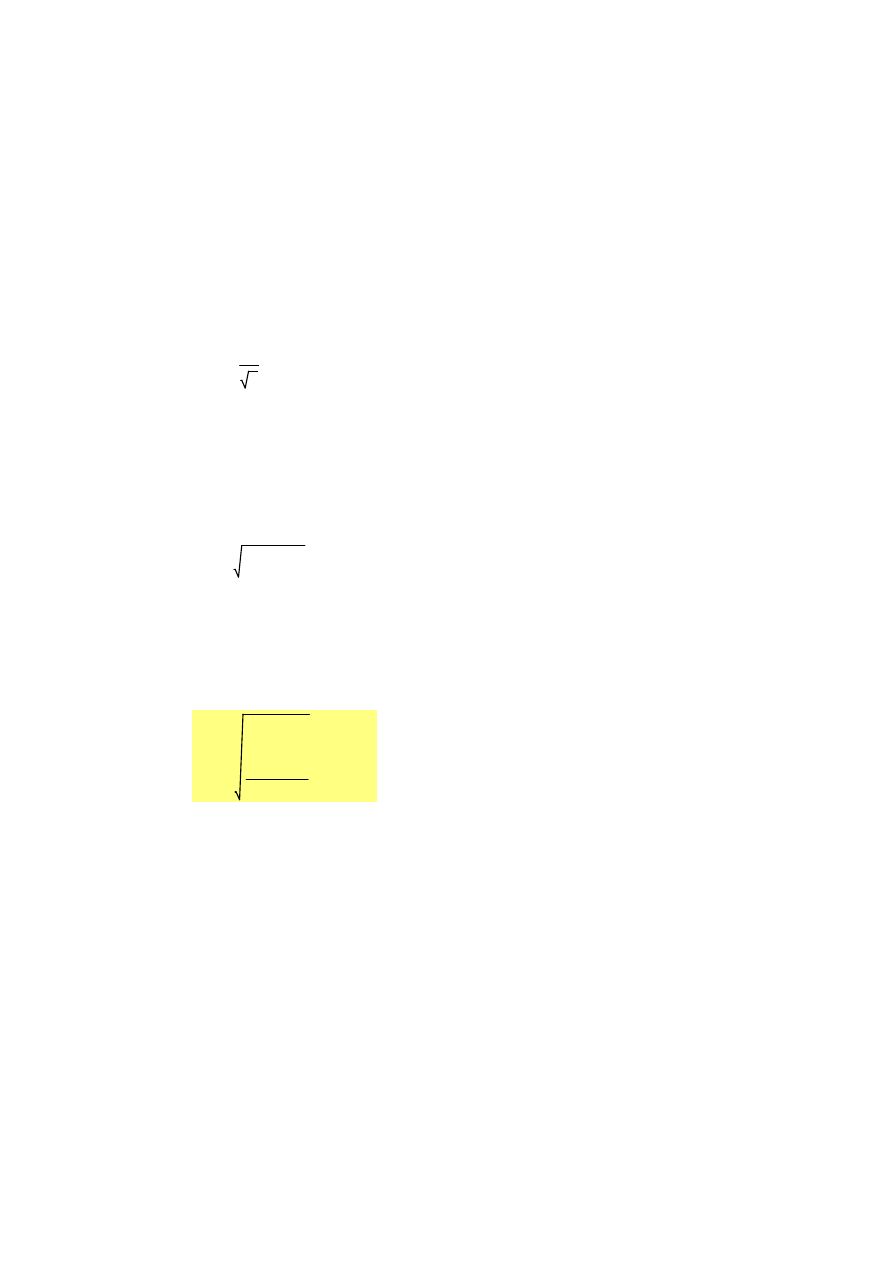
Na przykład taśma o długości nominalnej
l
20
:=
m ustalonej przez producenta jest
poddawana okresowej komparacji, w wyniku której jest ustalana poprawka
komparacyjna taśmy
pk
0.004
:=
(rys. 1.2.1). Różnica temperatury w czasie pomiaru i
podczas komparacji powoduje wydłużenie taśmy, nazywane poprawką termiczną
pt
0.0021
:=
(rys. 1.2.1). Zatem, do wyniku pomiaru za pomocą taśmy o długości l
dodaje się poprawkę termiczną i komparacyjną, proporcjonalnie do zmierzonej długości
d. Np. dla
d
10.01
:=
poprawka komparacyjna wynosi
pk
d
l
⋅
0.002
=
, natomiast
termiczna
pt
d
l
⋅
0.001
=
. Poprawka komparacyjna i poprawka termiczna taśmy są
błędami systematycznymi pomiaru odległości, odpowiednio instrumentalnym
i środowiskowym.
0
Długość nominalna taśmy wg. producenta l = 20 m
20 m
Temperatura w czasie komparacji t
k
= 20°C
C
Temperatura w czasie pomiaru terenowego
np. t = 29°C
Poprawka komparacyjna, np.
Poprawka termiczna
r = 0.0000115 m/°C - współczynnik
rozszerzalności liniowej stali.
pk
0.004
:=
m
r
0.0000115
:=
t
29
:=
tk
20
:=
pt
r t
tk
−
(
)
⋅
l
⋅
:=
Rys. 1.2.1.
pt 0.0021
=
m
Innym przykładem jest błąd systematyczny w pomiarach laserowych odległości za
pomocą tachimetrów, nazywany poprawką meteorologiczną. Wysyłany przez dalmierz
tachimetru promień laserowy ma prędkość określoną dla ustalonej wartości temperatury
powietrza i ciśnienia atmosferycznego np. 20
°
C i 1025 hPa. Ze zmianą temperatury
i ciśnienia ulega zmianie prędkość światła w atmosferze, co ma wpływ na wynik
pomiaru odległości. Zatem pomierzona odległość jest przeskalowywana M*d , gdzie
skala M jest funkcją przyrostów temteratury i ciśnienia względem podanych wartości
wzorcowych (E.Osada: Wykłady z geodezji i geoinformatyki 2 Tachimetria).
8
1.3. Bł
ę
dy przypadkowe
Bł
ę
dy przypadkowe
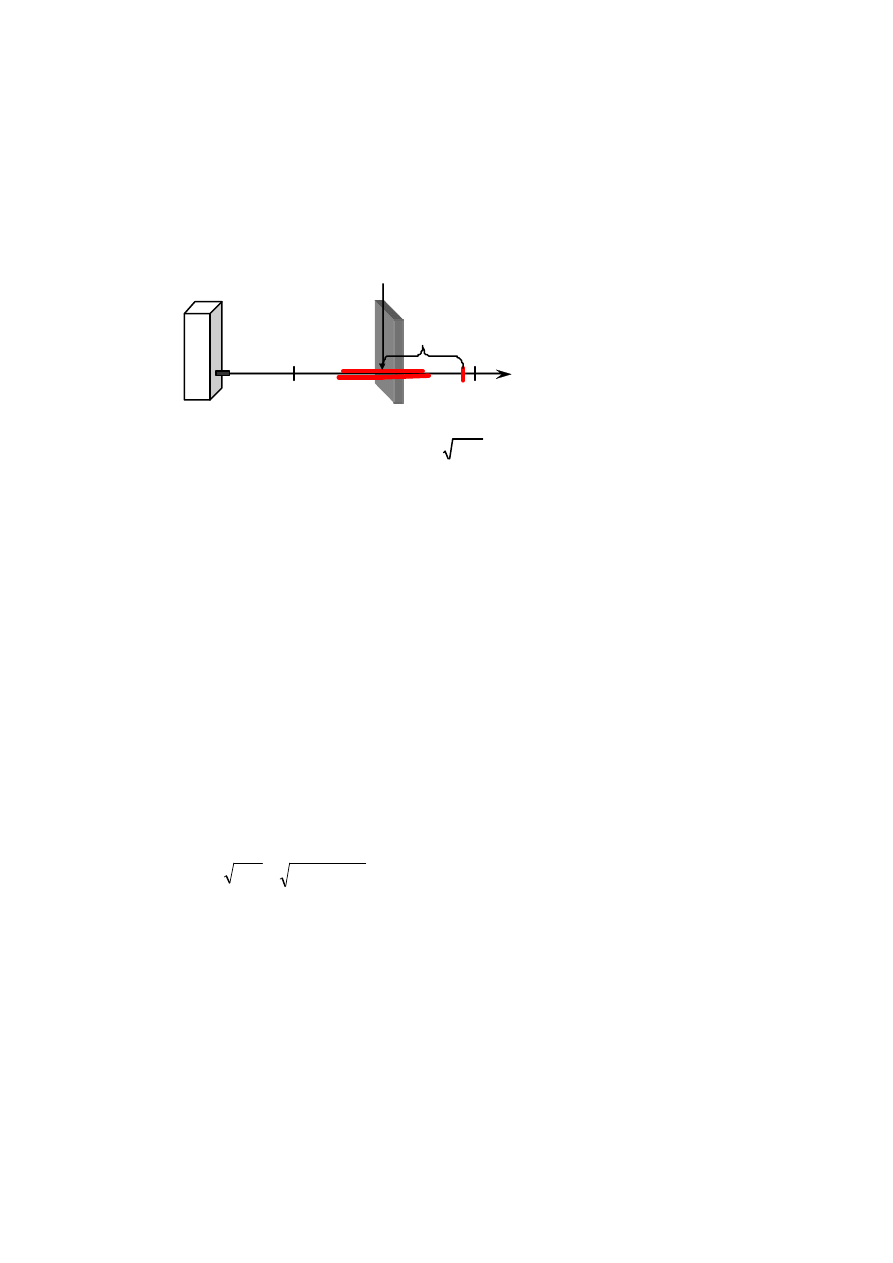
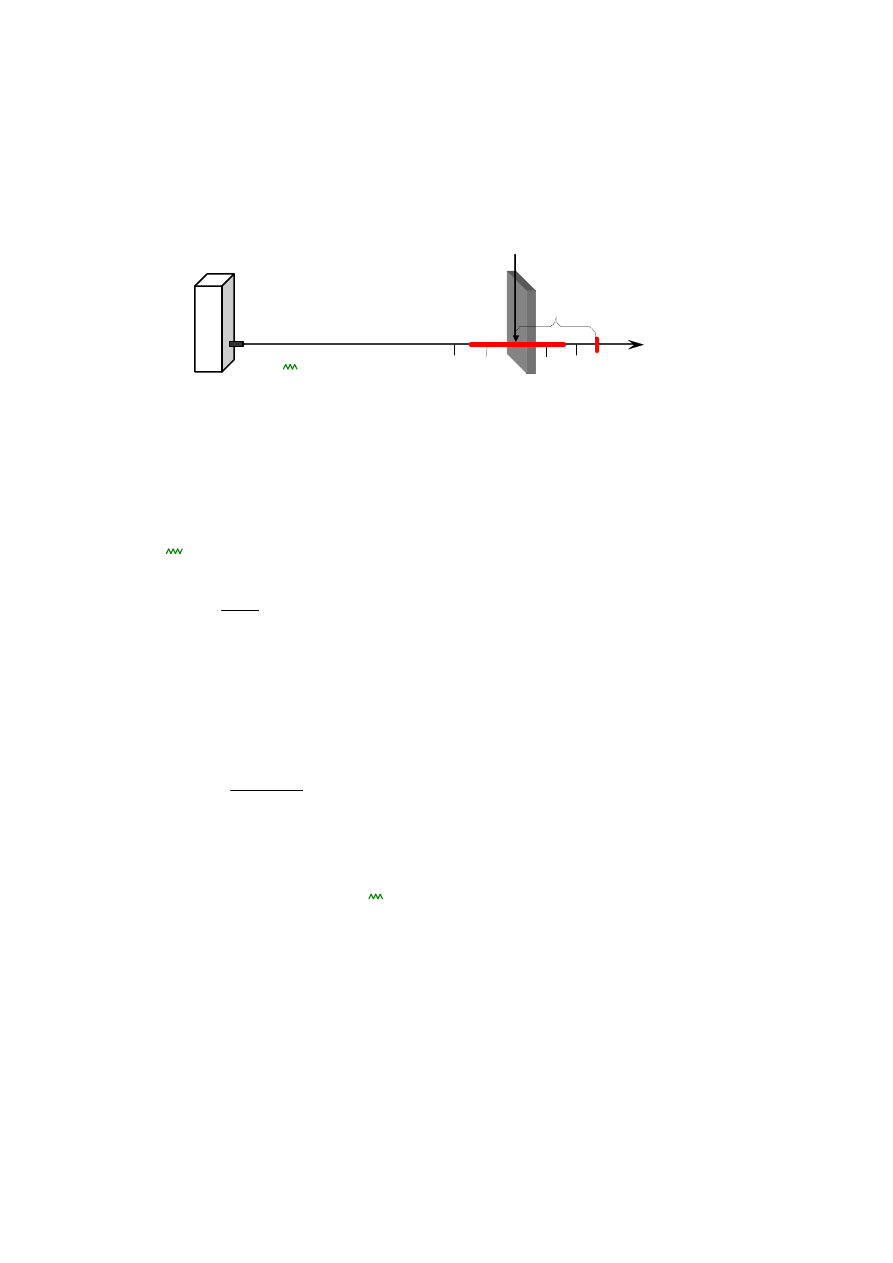
Z doświadczenia wiadomo, że wynik pomiaru pewnej wielkości x przyjmuje wartość
z przedziału a < x < b którego wielkość zależy od dokładności użytego przyrządu
pomiarowego (rys. 1.3.1).
v = x – Ex – odchylenie x (przyjmuje wartości
dodatnie i ujemne, Ev= 0 )
x - wynik pomiaru (zmienna losowa)
- odchylenie standardowe
2
Ev
=
σ
a
b
DISTO
m
m
Ex - wartość średnia
t
t
t = E
|
v
|
- odchylenie przeciętne
Rys. 1.3.1
Wynik pomiaru jest więc zmienną losową o wartości średniej Ex znajdującej się
w pobliżu środka przedziału (a, b).
Odchylenie wyniku pomiaru od wartości średniej v = x
−
Ex , nazywane błędem
przypadkowym pomiaru przyjmuje wartości dodatnie i ujemne, stąd jego wartość
ś
rednia jest równa zero Ev = 0.
Bł
ą
d przeci
ę
tny, bł
ą
d
ś
redni, wariancja
Miarami zmienności (rozrzutu) wyniku pomiaru x wokół wartości średniej Ex są:
wartość średnia bezwzględnej wartości odchylenia wyniku pomiaru, nazywana
•
odchyleniem przeciętnym:
t = E
|
v
|
pierwiastek z wartości średniej kwadratu odchylenia wyniku pomiaru, nazywany
•
odchyleniem średniokwadratowym, standardowym lub błędem średnim
pojedynczego pomiaru:
2
2
)
(
E
E
Ex
x
v
−
=
=
σ
kwadrat odchylenia standardowego nazywany wariancją:
•
σ
2
= Ev
2
= E(x-Ex)
2
9
1.4. Warto
ść
ś
rednia
Ś
rednia arytmetyczna
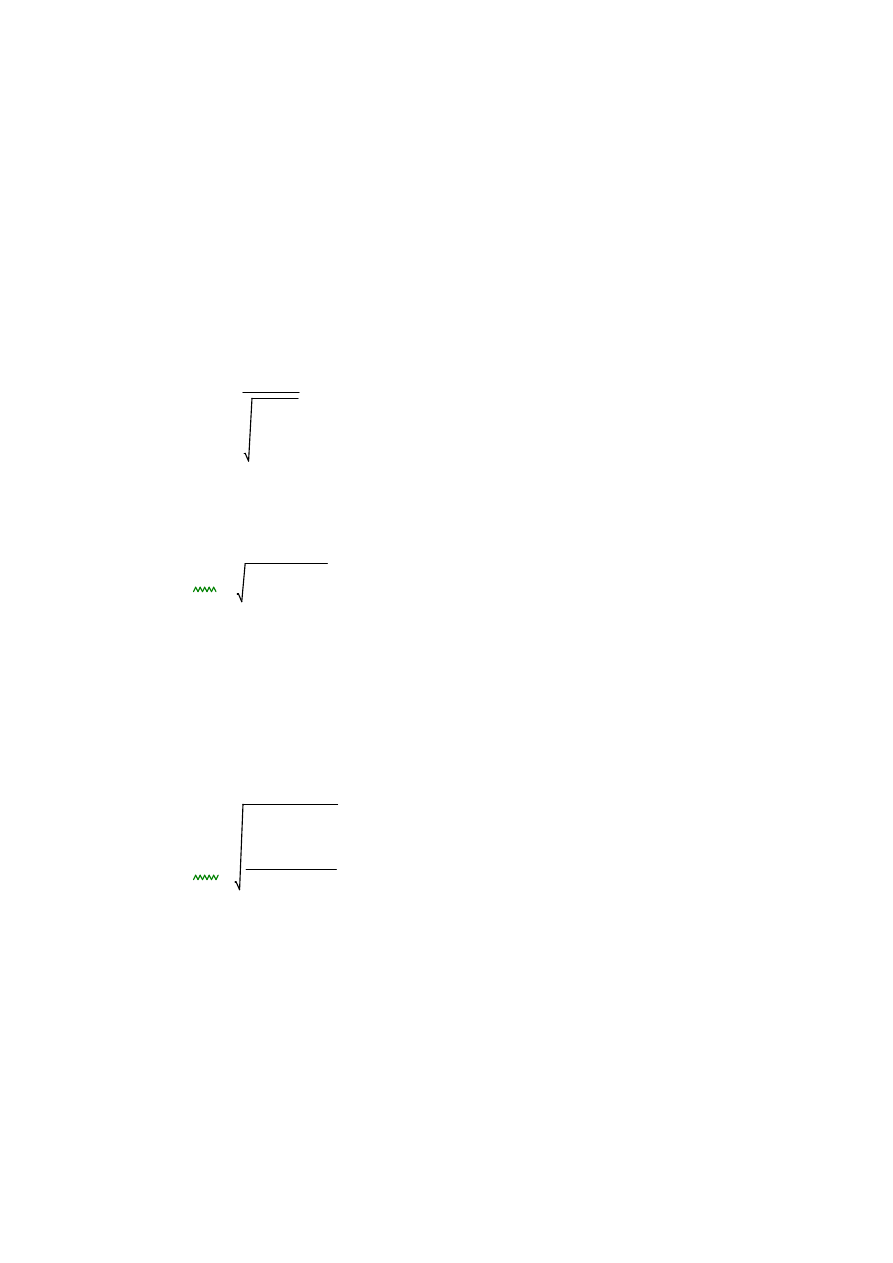
Dane są wartości wyników pomiarów jednakowo dokładnych x
i
, i = 1,2,...n o błędzie
ś
rednim pojedynczego pomiaru
m
0.002
:=
(rys. 1.4.1).
v
i
= x
i
– x
s r
– błąd przypadkowy
x
sr
- wartość średnia
x
i
– wyniki pomiarów
x
2
x
3
x
4
x
1
DISTO
m
sr
m
sr
sr
sr
sr
sr
x
x
v
x
x
v
x
x
v
x
x
v
−
=
−
=
−
=
−
=
4
4
3
3
2
2
1
1
x
4.006
4.002
4.008
4.004
:=
n
4
:=
i
1 n
..
:=
Rys. 1.4.1
Wartość średnia x
sr
jest wyznaczana w wyniku minimalizacji sumy kwadratów błędów
przypadkowych v
i
= x
i
−
x
sr
:
Σ
v
i
2
= v
1
2
+ v
2
2
+..+ v
n
2
= min.
Warunek konieczny minimum przyjmuje postać
Σ
v
i
= v
1
+ v
2
+..+ v
n
= 0, skąd
poszukiwana wartość średnia jest dana wzorem średniej arytmetrycznej:
xsr
1
n
i
x
i
∑
=
n
4.005
=
:=
Otrzymane błędy przypadkowe
v
x
xsr
−
:=
:
v
1
0.001
=
v
2
0.003
−
=
v
3
0.003
=
v
4
0.001
−
=
spełniają warunek Ev = 0:
1
n
i
v
i
∑
=
0
=
Błąd przeciętny pojedynczego pomiaru wynosi
t
1
n
i
v
i
∑
=
n
0.0020
=
:=
10
Pomiary były wykonane tym samym przyrządem w sposób niezależny, zatem:
wariancje wyników pomiarów są jednakowe
m
i
2
= Ev
i
2
= m
2
, natomiast
•
kowariancje m
ij
= Ev
i
v
j
, i
≠
j = 1,2,...n - wyrażające zależności między
•
poszczególnymi pomiarami, są z założenia równe zero: m
ij
= Ev
i
v
j
= 0.
Ś
rednia arytmetyczna x
ś
r
jako funkcja wyników pomiarów jest zmienną losową
o wariancji:
m
ś
r
2
= E(x
ś
r
- Ex
ś
r
)
2
= E(v
1
+...+v
n
)
2
/n
2
≡
(Ev
1
2
+...+Ev
n
2
)/n
2
= m
2
/n.
Stąd, błąd średni średniej arytmetycznej dany jest wzorem:
msr
m
n
0.0010
=
:=
Podobnie, odchyłki jako funkcje wyników pomiarów v
i
= x
i
−
x
ś
r
są zmiennymi
losowymi o wariancjach:
m
vi
2
= E(x
i
- x
ś
r
)
2
= E(x
i
- x
ś
r
+ Ex - Ex)
2
= E(v
i
- (v
1
+...+v
n
)/n)
2
= m
2
- m
ś
r
2
.
Zatem, błędy średnie odchyłek są jednakowe i równe:
mv
m
2
msr
2
−
0.0017
=
:=
Wartość średnia sumy kwadratów odchyłek jest równa:
EΣv
i
2
= EΣ(x
i
- x
ś
r
)
2
= EΣ[v
i
- (v
1
+...+v
n
)/n]
2
= m
2
(n - 1)
Stąd, błąd średni pojedynczego pomiaru wynosi:
m0
1
n
i
v
i
( )
2
∑
=
n
1
−
0.0026
=
:=
Jeżeli obliczona wartość błędu pojedynczego pomiaru jest w przybliżeniu równa
wartości znanej
m0 0.0026
=
≈
m
0.002
=
- podanej przez producenta przyrządu
pomiarowego to wyniki pomiarów są zgodne. W tym przypadku wartość średnia i jej
błąd średni x
ś
r
±
m
ś
r
są poprawne, a ochyłki v zawierają się na ogół, co do bezwzględnej
wartości w przedziale 2 - 3 krotnego ich błędu średniego:
|
v
| ≤
2 mv
⋅
0.0035
=
.
11
1.5.
Ś
rednia wa
ż
ona
Ś
rednia arytmetyczna wa
ż
ona
Dane są wyniki niejednakowo-dokładnych pomiarów x
i
±
m
i
, i = 1,2,...n (rys.1.5.1).
v
i
= x
i
– x
s r
– błąd przypadkowy
x
i
– wyniki pomiarów
x
2
x
3
x
4
x
1
DISTO
m
sr
m
sr
x
sr
- wartość średnia
x
4.006
4.002
4.008
4.004
:=
m
0.002
0.003
0.002
0.004
:=
n
4
:=
i
1 n
..
:=
Rys. 1.5.1.
Wartość średnia wyników pomiarów x
sr
jest wyznaczana ważoną metodą najmniejszych
kwadratów
Σ
p
i
v
i
2
= p
1
v
1
2
+ p
2
v
2
2
+..+ p
n
v
n
2
= min.
Jako wagi przyjmuje się liczby odwrotnie proporcjonalne do kwadratów błędów
ś
rednich pomiarów p
i
= m
2
/ m
i
2
gdzie współczynnik m jest równy jedności m = 1 lub
równy błędowi obserwacji której waga będzie równa jedności, na przykład pierwszej
m
m
1
:=
:
p
i
m
2
m
i
2
:=
p
1.00
0.44
1.00
0.25
=
Warunek konieczny minimum p
1
v
1
+ p
2
v
2
+..+ p
n
v
n
= 0 prowadzi do wzoru średniej
arytmetycznej ważonej:
x.sr
1
n
i
p
i
x
i
⋅
( )
∑
=
1
n
i
p
i
∑
=
4.006
=
:=
Otrzymane błędy przypadkowe
v
x
x.sr
−
:=
:
v
1
0.0001
=
v
2
0.0039
−
=
v
3
0.0021
=
v
4
0.0019
−
=
12
spełniają warunek konieczny minimum Ep
i
v
i
= 0
1
n
i
p
i
v
i
⋅
( )
∑
=
0.000
=
Pomiary są różnej dokładności więc:
wariancje wyników pomiarów nie są jednakowe m
i
2
= Ev
i
2
, natomiast
•
kowariancje m
ij
= Ev
i
v
j
, i
≠
j = 1,2,...n - wyrażające zależności między
•
poszczególnymi pomiarami, są z założenia równe zero: m
ij
= Ev
i
v
j
= 0.
Ś
rednia arytmetyczna ważona x
ś
r
jako funkcja wyników pomiarów jest zmienną
losową o wariancji m
ś
r
2
= E(x
ś
r
−
Ex
ś
r
)
2
= E(
Σ
p
i
v
i
)
2
/(
Σ
p
i
)
2
= m
2
/
Σ
p
i
.
Stąd, błąd średni średniej arytmetycznej ważonej dany jest wzorem:
m.sr
m
1
n
i
p
i
∑
=
0.0012
=
:=
Podobnie, odchyłki jako funkcje wyników pomiarów v
i
= x
i
−
x
ś
r
są zmiennymi losowymi
o wariancjach m
vi
2
= E(x
i
−
x
ś
r
)
2
= E(x
i
−
x
ś
r
+ Ex
−
Ex)
2
= E(v
i
−
(v
1
+...+v
n
)/n)
2
= m
i
2
- m
ś
r
2
. Zatem, błędy średnie odchyłek wynoszą:
mv
i
m
i
2
msr
2
−
:=
mv
0.0017
0.0028
0.0017
0.0039
=
Wartość oczekiwana (średnia) ważonej sumy kwadratów odchyłek jest równa
E
Σ
p
i
v
i
2
= E
Σ
p
i
(x
i
−
x
ś
r
)
2
= E
Σ
[v
i
−
(v
1
+...+v
n
)/n]
2
= m
2
(n
−
1).
Otrzymana stąd wartość współczynnika m:
m0
1
n
i
p
i
v
i
( )
2
⋅
∑
=
n
1
−
0.00201
=
:=
powinna być równa z dokładnością do 10% wartości przyjętej do wagowania
m
0.0020
=
.
13
v = x – Ex – błąd przypadkowy
wyniku pomiaru
x – wynik pomiaru
x
2
x
3
x
4
x
1
DISTO
m
m
Ex - wartość oczekiwana
wyniku pomiaru
x
sr
x
5
Zatem, w przypadku m
0
≈
m wyniki pomiarów są zgodne, otrzymana wartość średnia
i jej błąd średni x
ś
r
±
m
ś
r
są poprawne, a odchyłki v zawierają się na ogół, co do
bezwzględnej wartości w przedziale 2 - 3 krotnego ich błędu średniego
|
v
i
| ≤
2m
vi
.
1.6.
Ś
rednia odporna
Ś
rednia odporna na obserwacje odstaj
ą
ce
Dane są wartości wyników pomiaru odległości x
1
, x
2
,.. x
5
dalmierzem o błędzie średnim
pojedynczego pomiaru
m
0.0025
:=
m (rys. 1.6.1). Obserwacja x
5
wyraźnie odstaje od
pozostałych, jest obciążona błędem grubym (rys. 1.6.1).
x
4.006
4.002
4.008
4.004
4.040
:=
n
5
:=
i
1 n
..
:=
Rys. 1.6.1.
W takich przypadkach, po obliczeniu wartości średniej poprawki obserwacji
odstających v będą miały duże wartości, warunek
|
v
| ≤
3m
v
nie będzie spełniony przez te
obserwacje. Obliczenia wartości średniej są kontunuowane odrzucając za każdym razem
obserwację odstającą o największej wartości poprawki v aż do spełnienia kryterium
|
v
| ≤
3m
v
przez pozostałe obserwacje.
Inny sposób polega na iteracyjnym obliczaniu średniej ważonej, przypisując na każdym
kroku obserwacjom odstającym coraz to mniejsze wagi, w zależności od ich rosnących
odchyłek v. W ten sposób ich wpływ na wyznaczaną wartość średnią jest
minimalizowany - tak jakby były odrzucane. Można to osiągnąć na różne sposoby, na
przykład przez powiększanie błędów obserwcji odstających m
i
dla których
|
v
i
| >
3m
i
,
o ich odległość od granicy przedziału ufności:
|
v
i
|
- 3m
i
. W tym przypadku modyfikacja
błędów średnich wszystkich obserwacji następuje na każdym koroku iteracji według
zależności:
>
−
+
≤
=
i
i
i
i
i
i
i
i
i
m
v
m
v
m
m
v
m
m
3
)
3
(
3
natomiast wag:
14
Wyszukiwarka
Podobne podstrony:
Spis treści 2014, Inżynieria Środowiska, Geodezja, Operat pomiarowy - Bezmiechowa 2014
Wyznaczenie błędu indeksu - spis tresci i obliczenia, Studia, AGH, Rok II, geodezja II, fora.netowe
Spis treści, geodezja, EGIB
spis treści, Geodezja inżynierjna
Wykład 1 geodezja
spis treśći do skryptu z wykładów, ZUT Szczecin, Technologiczny Projekt Zakładu
Skrot wykladu Ekonometria WSEI, Spis treści
Geodezja i miernictwo wyklad 1, GEODEZJA(1)(1)
OK, Inżynieria Środowiska, semestr 2 UR, Geodezja, wykłady, Geodezja, Geodezja
budownictwo wyklady, Geodezja, zarys budownictwa
Wykład 4 geodezja
więcej podobnych podstron