1.
Treść zadania
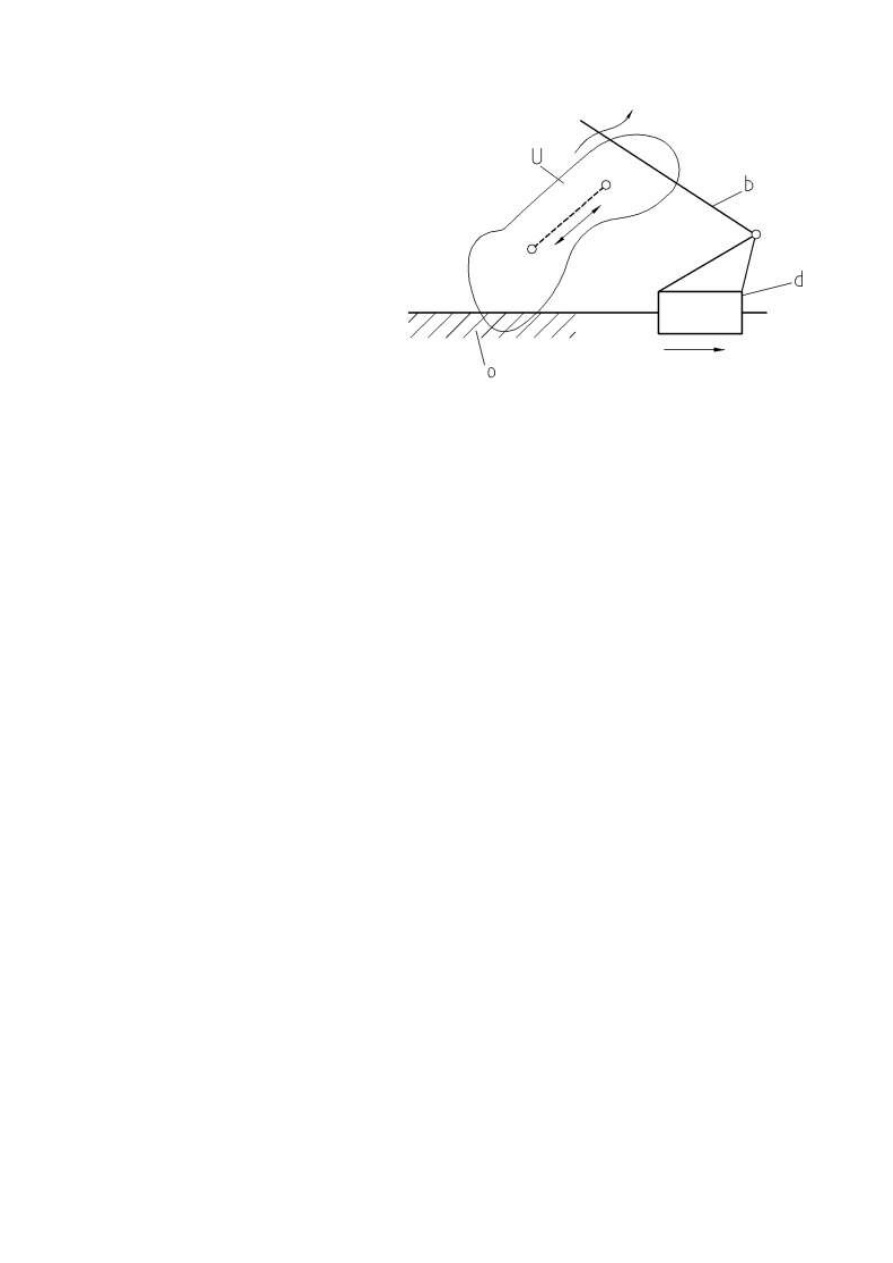
Zmiana długości
siłownika powinna
wywoływać jednoznaczny ruch członu
biernego
przy
wykorzystaniu
odpowiedniego łańcucha pośredniczącego.
Należy:
•
wyprowadzić równanie strukturalne
łańcucha dla p
2
< 2, 1 < k ≤ 3,
•
sporządzić
tabelę
struktur
mechanizmu,
•
jedną strukturę (z parą II klasy)
przedstawić
w
postaci
schematów
kinematycznych
1.
Równanie strukturalne łańcucha pośredniczącego
Ruchliwość teoretyczna układu pośredniczącego wynosi:
W
t
= W
c
+ W
b
+ W
U
gdzie:
W
t
– ruchliwość teoretyczna; ustalonej długości siłownika układ ma być w jednoznacznym
położeniu, zatem W
t
= 0,
W
c
– ruchliwość członów czynnych; ze względu na brak członów czynnych poza łańcuchem
pośredniczącym W
c
= 0,
W
b
– ruchliwość członu biernego, z rysunku można zauważyć że może on wykonywać dwa
rodzaje ruchu (posuw w jednym kierunku oraz obrót), zatem W
b
= 2
W
U
– ruchliwość łańcucha pośredniczącego U,
W
U
= W
t
– W
c
– W
b
W
U
= 0 – 0 – 2 = –2
Jednocześnie:
W
U
= 3(n-1) – 2p
1
– 1p
2
gdzie:
n – liczba członów łańcucha U,
p
1
– liczba par pierwszej klasy,
p
2
– liczba par drugiej klasy,
k = n-1
W
U
= 3k – 2p
1
– 1p
2
Otrzymujemy zatem równanie łańcucha:
3k – W
U
= 2p
1
+ 1p
2
2.
Tabela struktur łańcucha pośredniczącego
Tabelę z możliwymi strukturami wyznaczamy na podstawie równania strukturalnego, które dla
naszego łańcucha przyjmuje postać:
3k + 2 = 2p
1
+ 1p
2
Z treści zadania wynikają również ograniczenia:
p
2
< 2
1 < k ≤ 3
oraz w łańcuchu występuje siłownik, który jest połączony parami pierwszej klasy, zatem:
p
1
≥ 2
Tabela struktur łańcucha wygląda zatem następująco:
k
p
1
p
2
k.p
1
.p
2
1
2
1
1.2.1
2
4
0
2.4.0
3
5
1
3.5.1
3.
Struktury zamkniętego łańcucha
Założono, że w łańcuchu w członie mogą być maksymalnie 4 węzły. W łańcuchu muszą zachodzić
następujące równości:
k + 1 = n
2
+ n
3
+ n
4
2(p
1
+ p
2
) = 2n
2
+ 3n
3
+4n
4
gdzie:
n
2
– ilość członów dwuwęzłowych,
n
3
– ilość członów trójwęzłowych,
n
4
– ilość członów czterowęzłowych,
Na rozwiązanie nałożono ograniczenie ze względu na występujący w łańcuchu siłownik:
n
2
≥ 1
Tabela rozwiązań układu wygląda zatem następująco:
Lp.
k+1
n
2
n
3
n
4
k.p
1
.p
2
-n
2
.n
3
.n
4
1
1+1
1
0
1
1.2.1-1.0.1
2
2+1
1
2
0
2.4.0-1.2.0
3
2+1
2
0
1
2.4.0-2.0.1
4
3+1
1
2
1
3.5.1-1.2.1
5
3+1
2
0
2
3.5.1-2.0.2
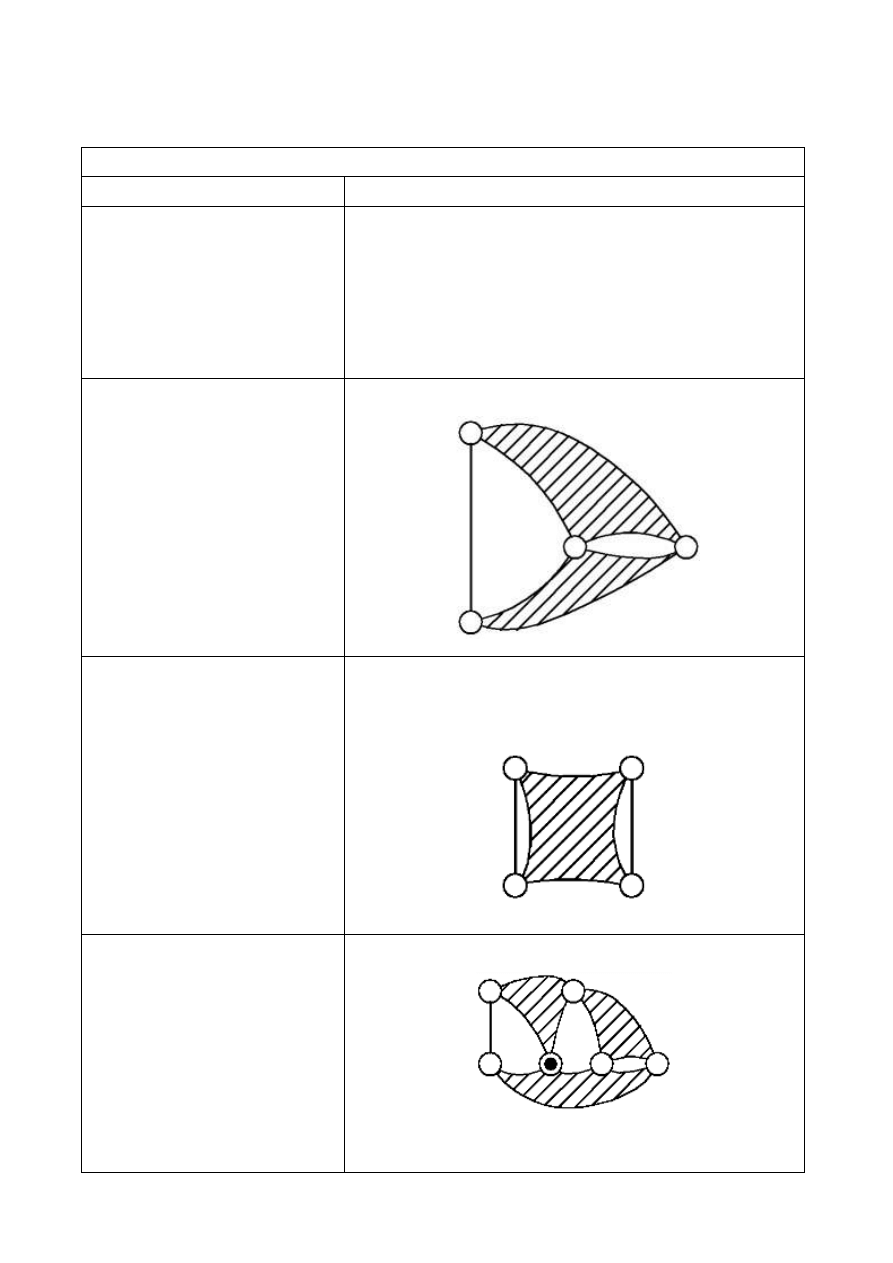
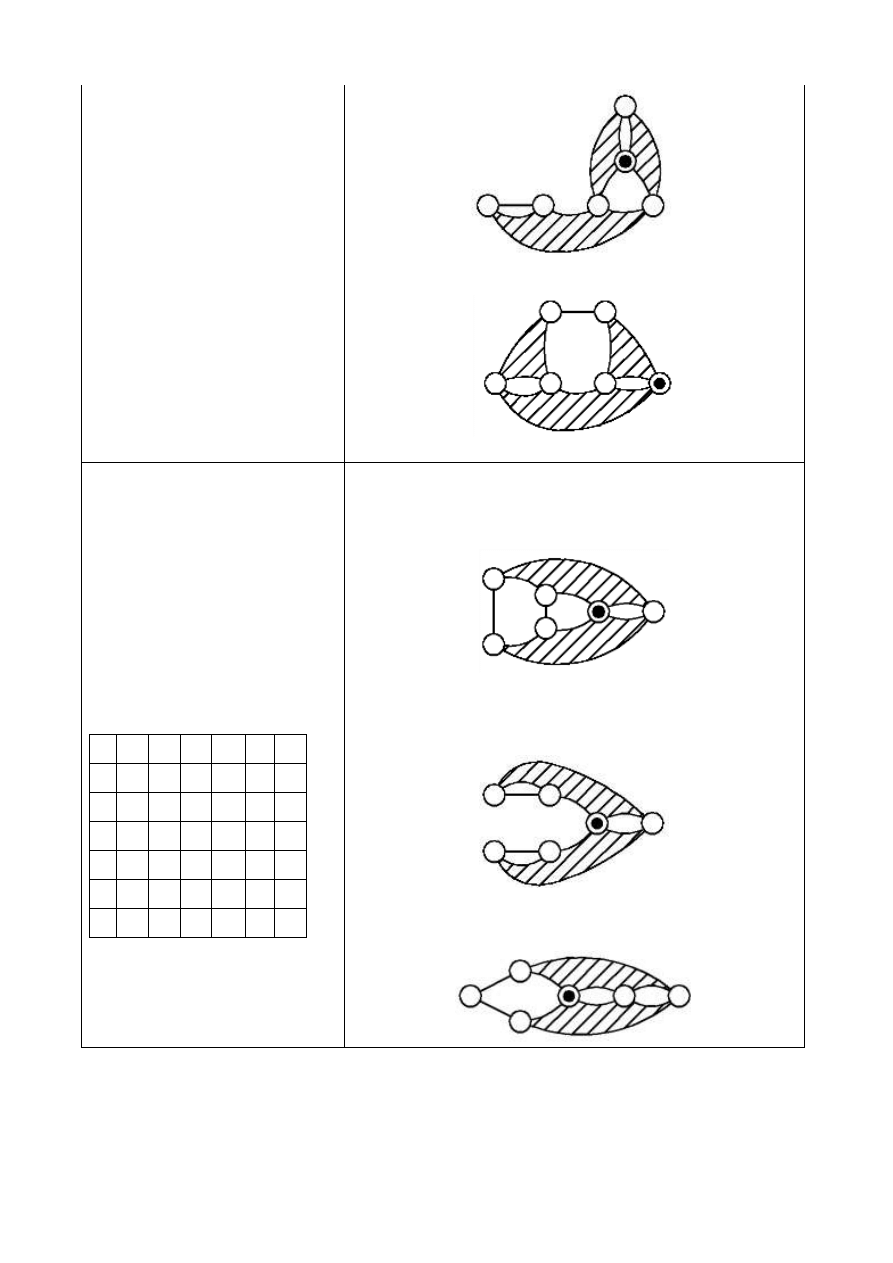
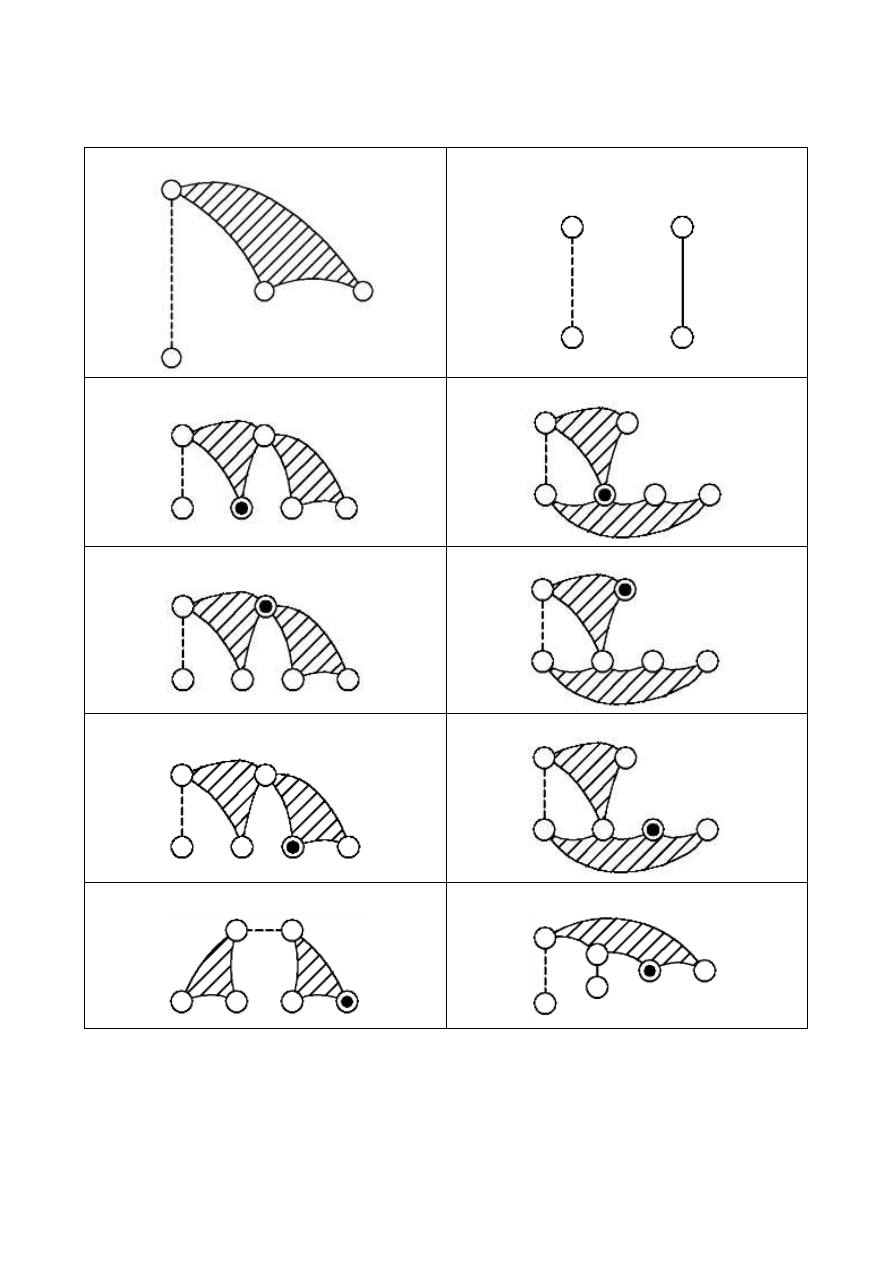
Tabela macierzy połączeń i schematów strukturalnych zamkniętych łańcuchów:
Łańcuchy zamknięte
Symbol i macierz połączeń
Schemat strukturalny łańcucha
1.2.1-1.0.1
𝑁
2
𝑁
4
𝐴
1
= [
0
𝑥
1
𝑥
1
0 ]
𝑁
2
𝑁
4
x
1
= 2
x
1
= 4
Sprzeczność
2.4.0-1.2.0
𝑁
2
𝑁
3
(1)
𝑁
3
(2)
𝐴
2
= [
0
𝑥
1
𝑥
2
𝑥
1
0
𝑥
3
𝑥
2
𝑥
3
0
]
𝑁
2
𝑁
3
(1)
𝑁
3
(2)
x
1
+ x
2
= 2
x
1
+ x
3
= 3
x
2
+ x
3
= 3
x
1
= 1, x
2
= 1, x
3
= 2
2.4.0-1.2.0
2.4.0-2.0.1
𝑁
2
(1)
𝑁
2
(2)
𝑁
4
𝐴
3
= [
0
𝑥
1
𝑥
2
𝑥
1
0
𝑥
3
𝑥
2
𝑥
3
0
]
𝑁
2
(1)
𝑁
2
(2)
𝑁
4
x
1
+ x
2
= 2
x
1
+ x
3
= 2
x
2
+ x
3
= 4
x
1
= 0, x
2
= 2, x
3
= 2
2.4.0-2.0.1
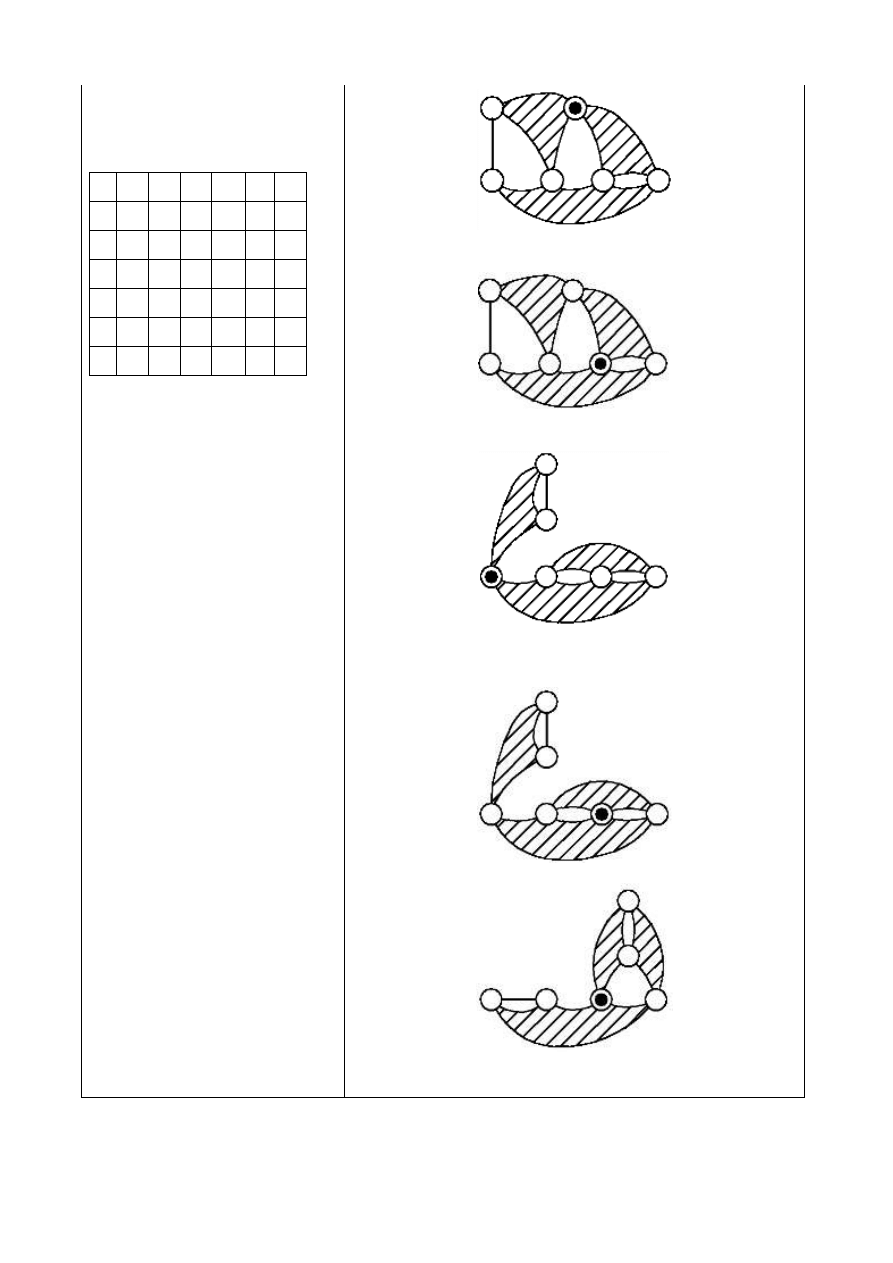
3.5.1-1.2.1
𝑁
2
𝑁
3
(1)
𝑁
3
(2)
𝑁
4
𝐴
4
= [
0
𝑥
1
𝑥
2
𝑥
3
𝑥
1
0
𝑥
4
𝑥
5
𝑥
2
𝑥
4
0
𝑥
6
𝑥
3
𝑥
5
𝑥
6
0
]
𝑁
2
𝑁
3
(1)
𝑁
3
(2)
𝑁
4
x
1
+ x
2
+ x
3
= 2
3.5.1-1.2.1-A1
3.5.1-1.2.1-A2
x
1
+ x
4
+ x
5
= 3
x
2
+ x
4
+ x
6
= 3
x
3
+ x
5
+ x
6
= 4
A B C D E F
x
1
0
0
0
1
1
2
x
2
1
2
0
1
0
0
x
3
1
0
2
0
1
0
x
4
1
0
2
0
1
0
x
5
2
3
1
2
1
1
x
6
1
1
1
2
2
3
Wyniki A i E oraz B i F dają
identyczne schematy strukturalne
3.5.1-1.2.1-A3
3.5.1-1.2.1-B1
3.5.1-1.2.1-B2
3.5.1-1.2.1-C1
3.5.1-1.2.1-C2
3.5.1-1.2.1-D
.5.1-2.0.2
𝑁
2
(1)
𝑁
2
(2)
𝑁
4
(1)
𝑁
4
(2)
𝐴
5
= [
0
𝑥
1
𝑥
2
𝑥
3
𝑥
1
0
𝑥
4
𝑥
5
𝑥
2
𝑥
4
0
𝑥
6
𝑥
3
𝑥
5
𝑥
6
0
]
𝑁
2
(1)
𝑁
2
(2)
𝑁
4
(1)
𝑁
4
(2)
x
1
+ x
2
+ x
3
= 2
x
1
+ x
4
+ x
5
= 2
x
2
+ x
4
+ x
6
= 4
x
3
+ x
5
+ x
6
= 4
A B C D E F
x
1
0
0
0
1
1
2
x
2
1
2
0
1
0
0
x
3
1
0
2
0
1
0
x
4
1
0
2
0
1
0
x
5
1
2
0
1
0
0
x
6
2
2
2
3
3
4
Wyniki B i C oraz D i E dają
identyczne schematy strukturalne.
Wynik F daje dwa łańcuchy, zatem
go odrzucamy
3.5.1-2.0.2-A
3.5.1-2.0.2-B
3.5.1-2.0.2-D
4.
Struktury otwartego łańcucha
Otwieramy łańcuchy zamknięte poprzez usunięcie jednego z członów w taki sposób aby wszystkie
kontury o ruchliwości nie większej od zera zostały otwarte oraz łańcuch musi posiadać jeden człon
dwuwęzłowy, który zastąpimy siłownikiem.
2.4.0-1.2.0
2.4.0-2.0.1
3.5.1-1.2.1-A1-1
3.5.1-1.2.1-A1-2
3.5.1-1.2.1-A2-1
3.5.1-1.2.1-A2-2
3.5.1-1.2.1-A3-1
3.5.1-1.2.1-A3-2
3.5.1-1.2.1-D
3.5.1-2.0.2-A
5.
Tabela schematów podstawowych
Łańcuchy zostały podłączone do układu z zadania:
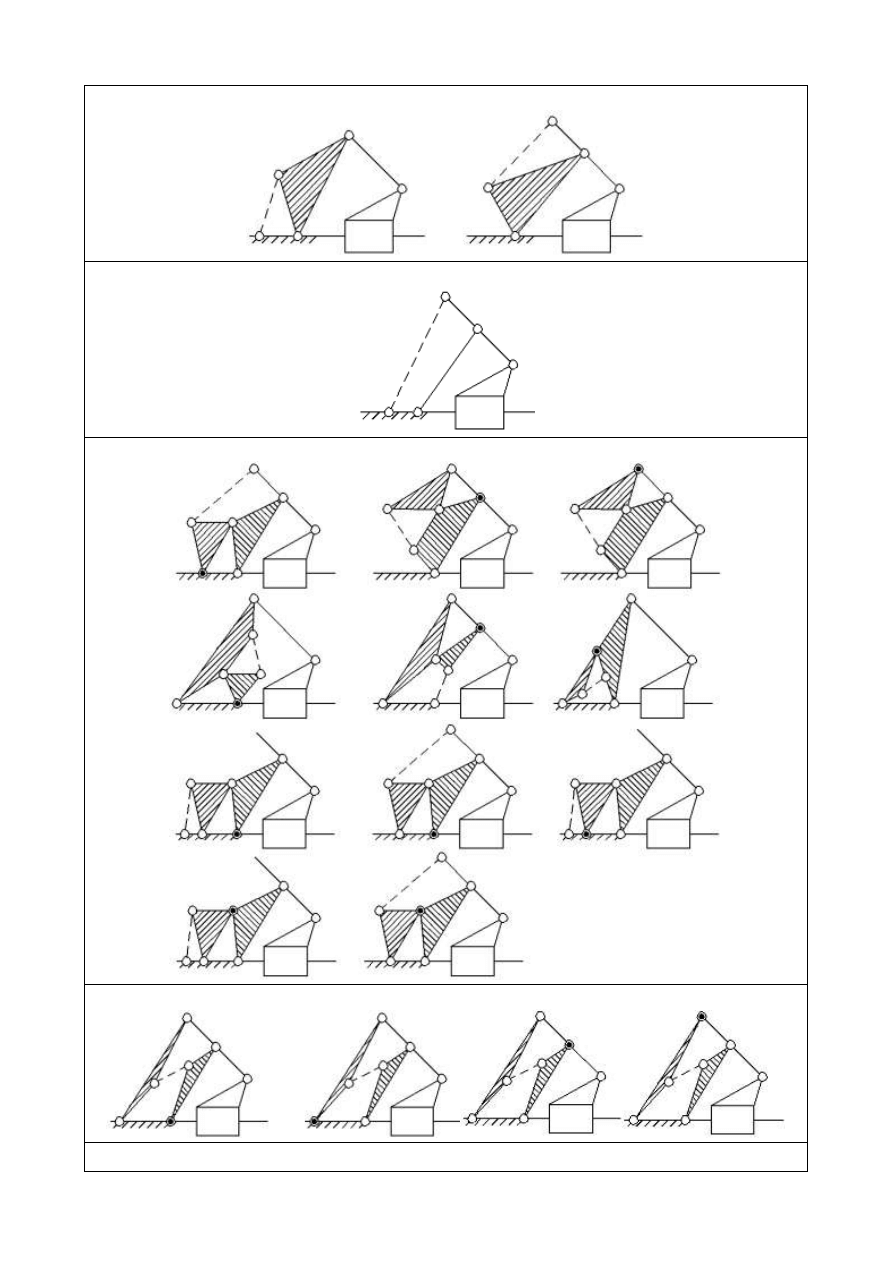
2.4.0-1.2.0
2.4.0-2.0.1
3.5.1-1.2.1-A
3.5.1-1.2.1-D
3.5.1-2.0.2-A
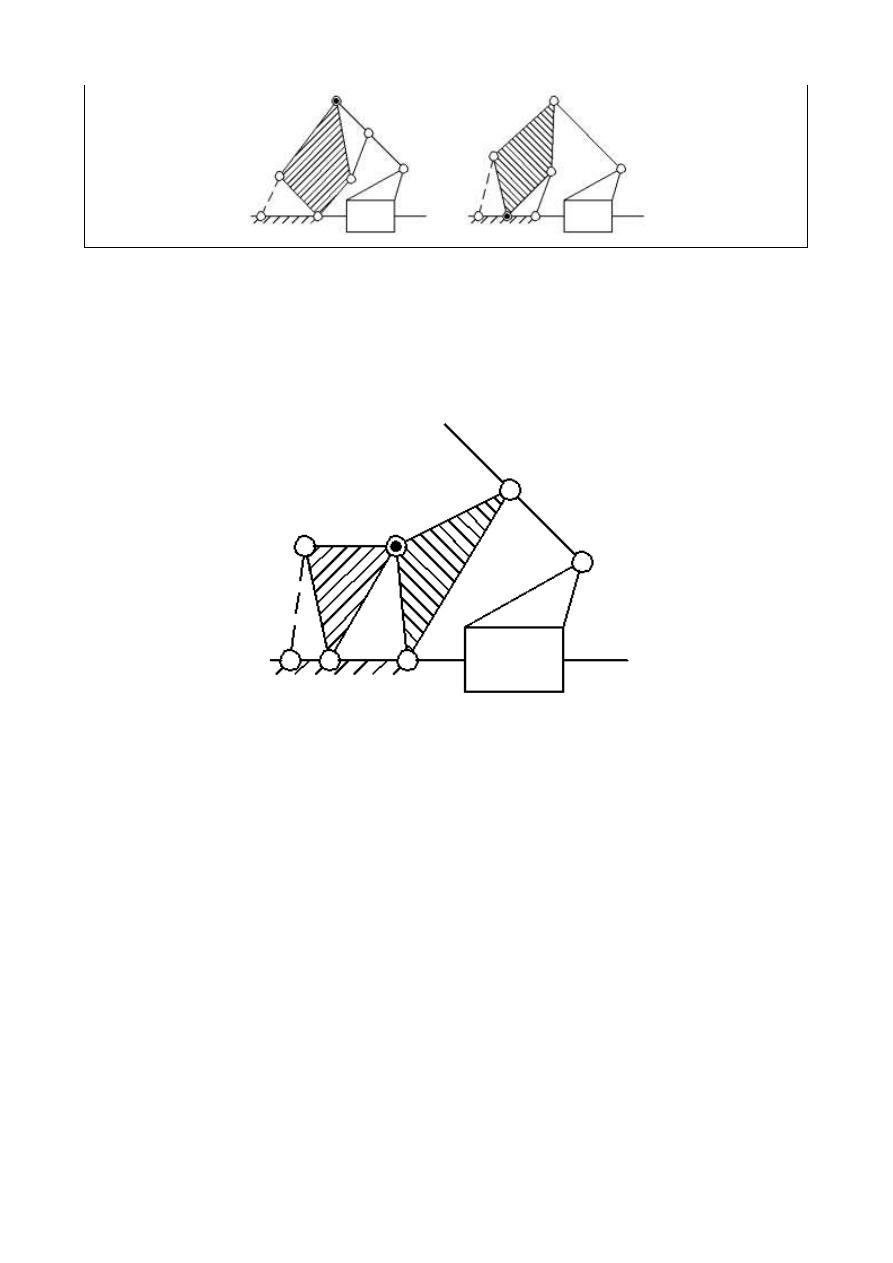
6.
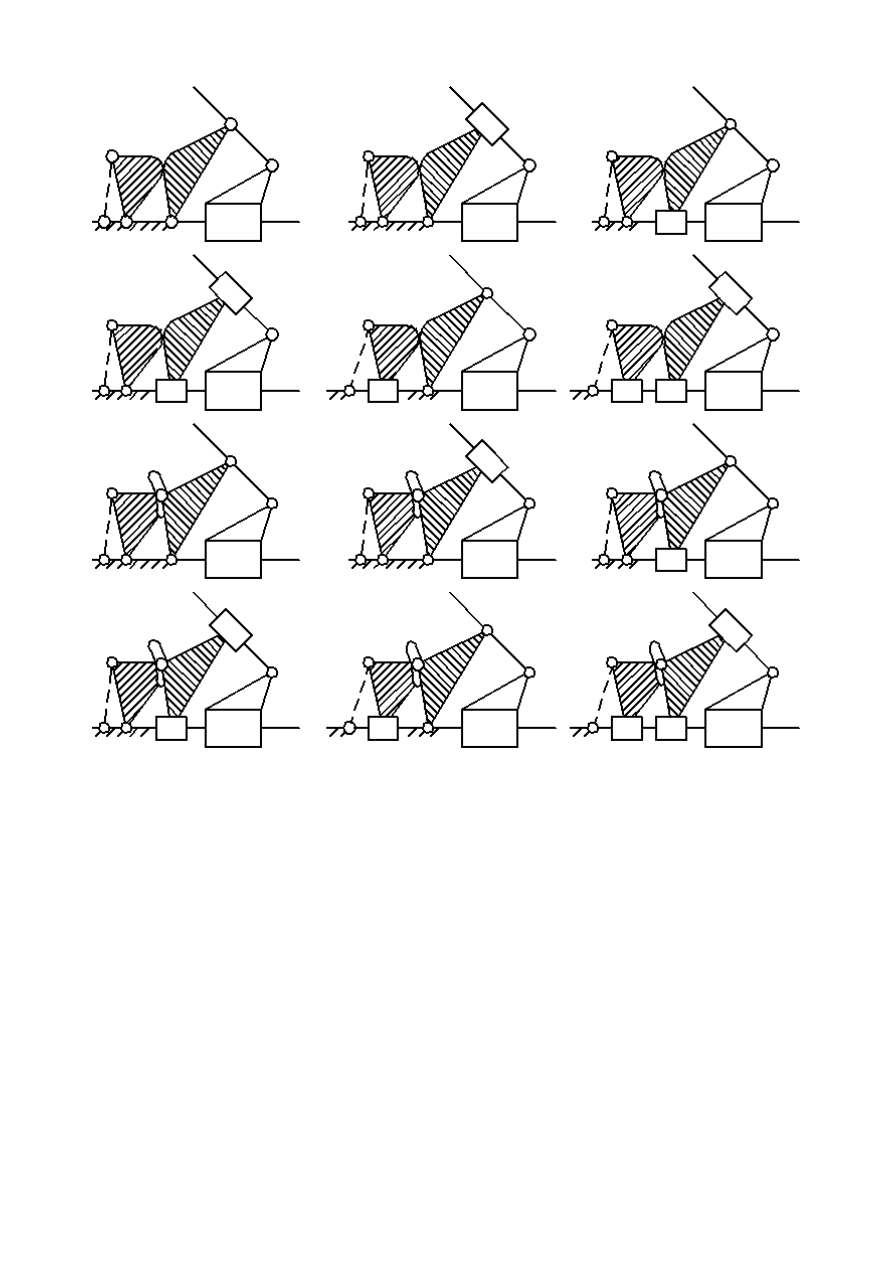
Schematy kinematyczne
Wybrany schemat podstawowy:
Przykładowe schematy kinematyczne dla wybranej struktury podstawowej:
Wyszukiwarka
Podobne podstrony:
Projekt nr 2 2 id 399190 Nieznany
projekt 7 MP KL nr 7 id 832557 Nieznany
projekty szkolen(1) id 401146 Nieznany
Projekt nr2 id 399211 Nieznany
Geografia nr 2 id 188772 Nieznany
Projekt2 poprawiony id 400268 Nieznany
Cwiczenie nr 8 id 99953 Nieznany
Lista nr 3 id 270070 Nieznany
ef 271 4 2012 zal nr 2 id 15072 Nieznany
Lab nr 3 id 258529 Nieznany
Projekt z ekologii id 399851 Nieznany
3 Projektowanie betonu id 34011 Nieznany (2)
nr 5 id 324785 Nieznany
Cwiczenie nr 2 4 id 99899 Nieznany
Materialy do wykladu nr 5 id 28 Nieznany
Projektowanie przekladnie id 40 Nieznany
Projekt z budownictwa id 399843 Nieznany
Projektowanie raportow id 40062 Nieznany
druk nr 5 id 142957 Nieznany
więcej podobnych podstron