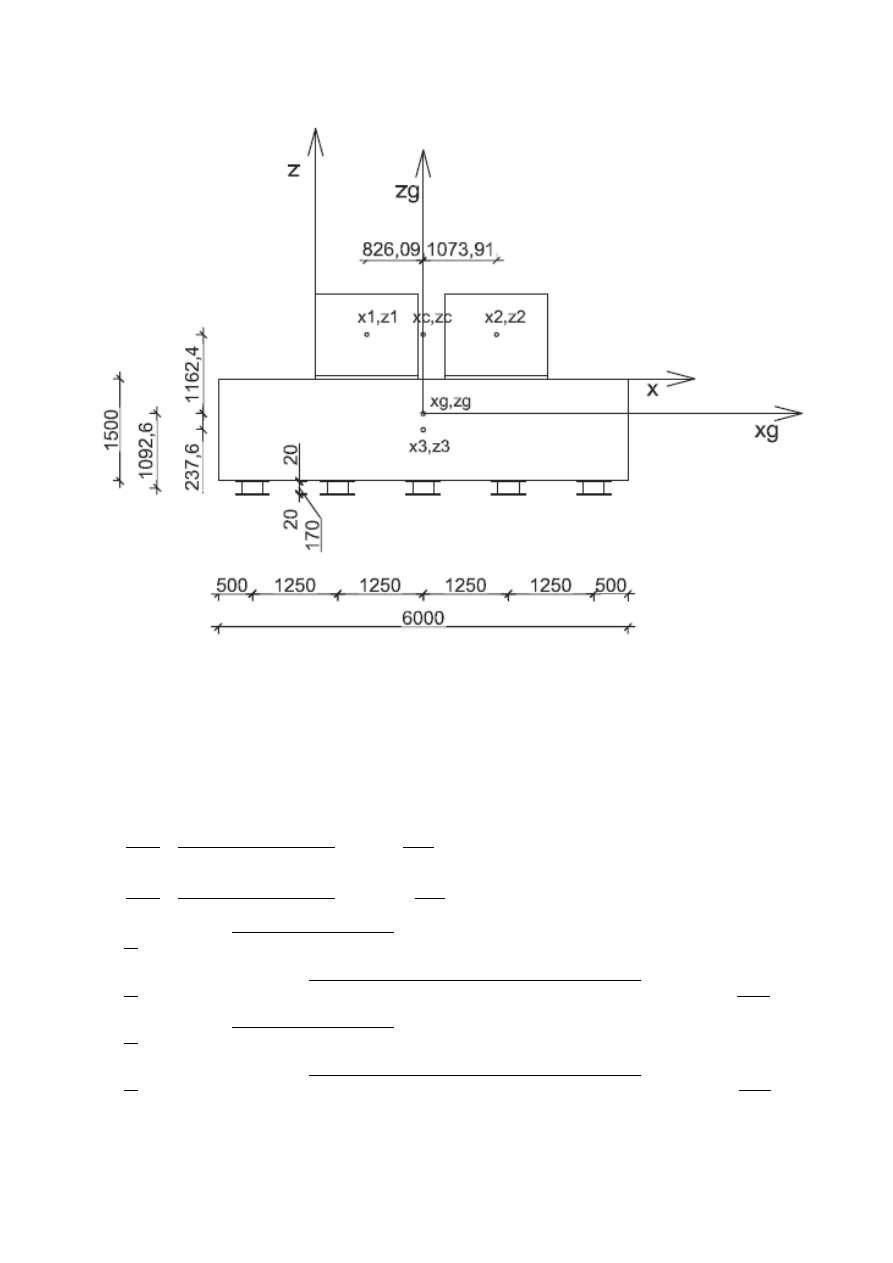
1.Ukształtowanie obiektu – wyznaczenie podstawowych gabarytów konstrukcji.
1.1.Dane:
•
Silnik:
d
1
= 1200mm
l
1
= 1500mm
m
1
= 6,5Mg
•
Wentylator:
d
2
= 1200mm
l
2
= 1500mm
m
2
= 5,00Mg
•
Cokół żelbetowy pod silnikiem:
nie występuje
•
Podbeton pod silnikiem i wentylatorem: 50mm
•
Odległość między silnikiem, a wentylatorem: x = 400mm
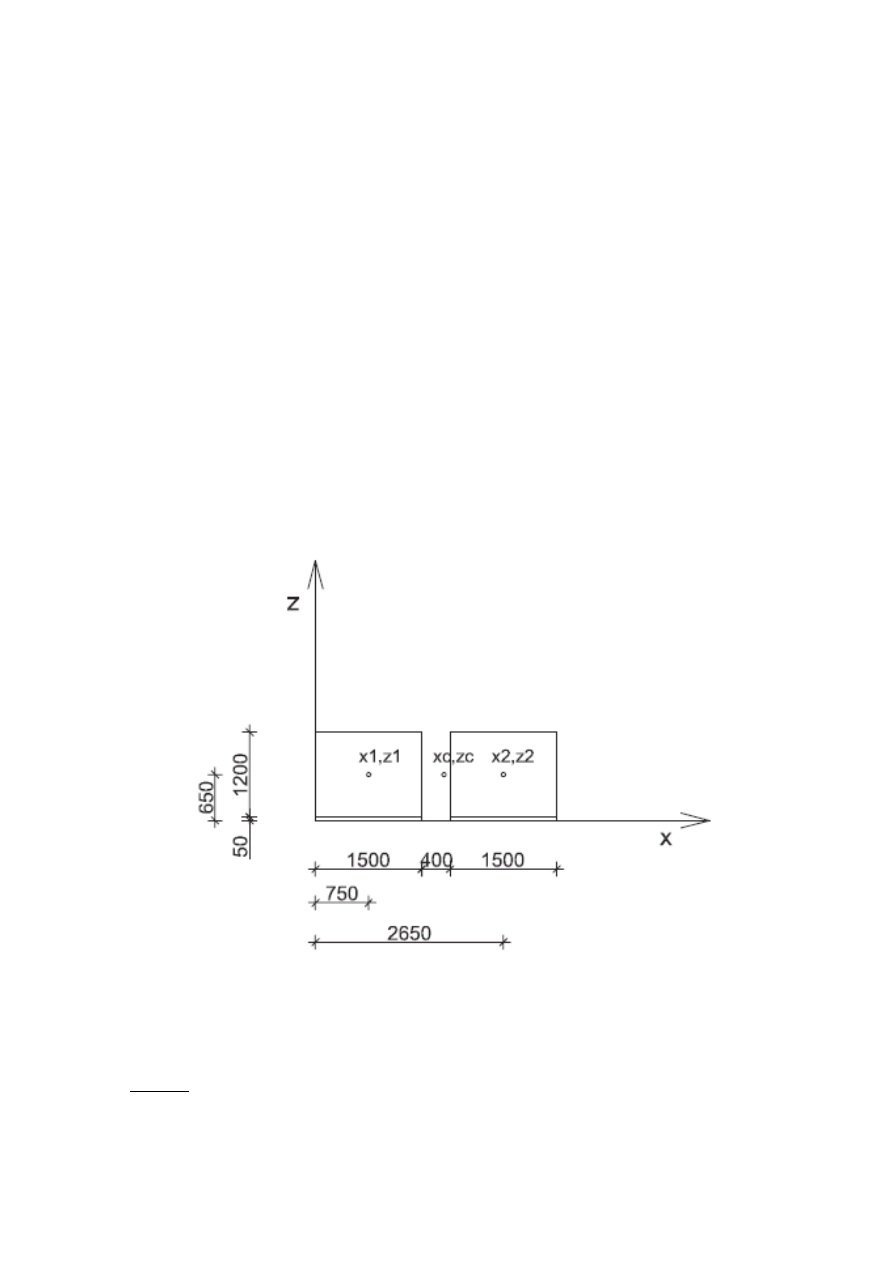
1.2. Wyznaczenie środka ciężkości układu:
C
i
i
C
C
C
C
M
m
x
X
)
Z
,
X
(
S
∑
⋅
=
1
C
i
i
C
M
m
z
Z
∑
⋅
=
M
c
= m
1
+ m
2
M
c
= 6,5 + 5,0 = 11,5Mg
Współrzędne środków ciężkości m
1
; m
2
;
Silnik:
m
1
(x
1
, z
1
) = (750, 650)
Wentylator:
m
2
(x
2
, z
2
) = (2650, 650)
S
c
X
c
, Z
c
X
c
=
750
∗6,52650∗5,0
11,5
=1576,09 mm
Z
c
=
650∗6,5650∗5,0
11,5
=650mm
Przyjęto środek ciężkości układu:
S
c
X
c
, Z
c
X
c
=
750
∗6,52650∗5,0
11,5
=1576,09 mm
Z
c
=
650∗6,5650∗5,0
11,5
=650mm
2.Obliczenie ciężarów i położenie głównego środka ciężkości całego układu.
2.1. Obliczenie ciężarów:
•
Silnik: m
1
= 6,5Mg
•
Wentylator: m
2
= 5,0Mg
M
c
= m
1
+ m
2
M
c
= 6,5+5,0 = 11,5Mg
2.2. Przyjęcie wymiarów fundamentu:
m
4
= (4 ÷ 5) (m
1
+ m
2
)
(m
1
+ m
2
) = 6,5+5,0 = 11,5Mg
m
4
= (46 ÷ 57,5) Mg
Przyjęto:
d
4
= 2500mm
l
4
= 6000mm
h
4
= 1500mm
m
4
= d
4
·l
4
·h
4
·γ = 2,5·6,0·1,5·2,5 = 56,25Mg
(przyjęto ciężar betonu 2,5T/m
3
)
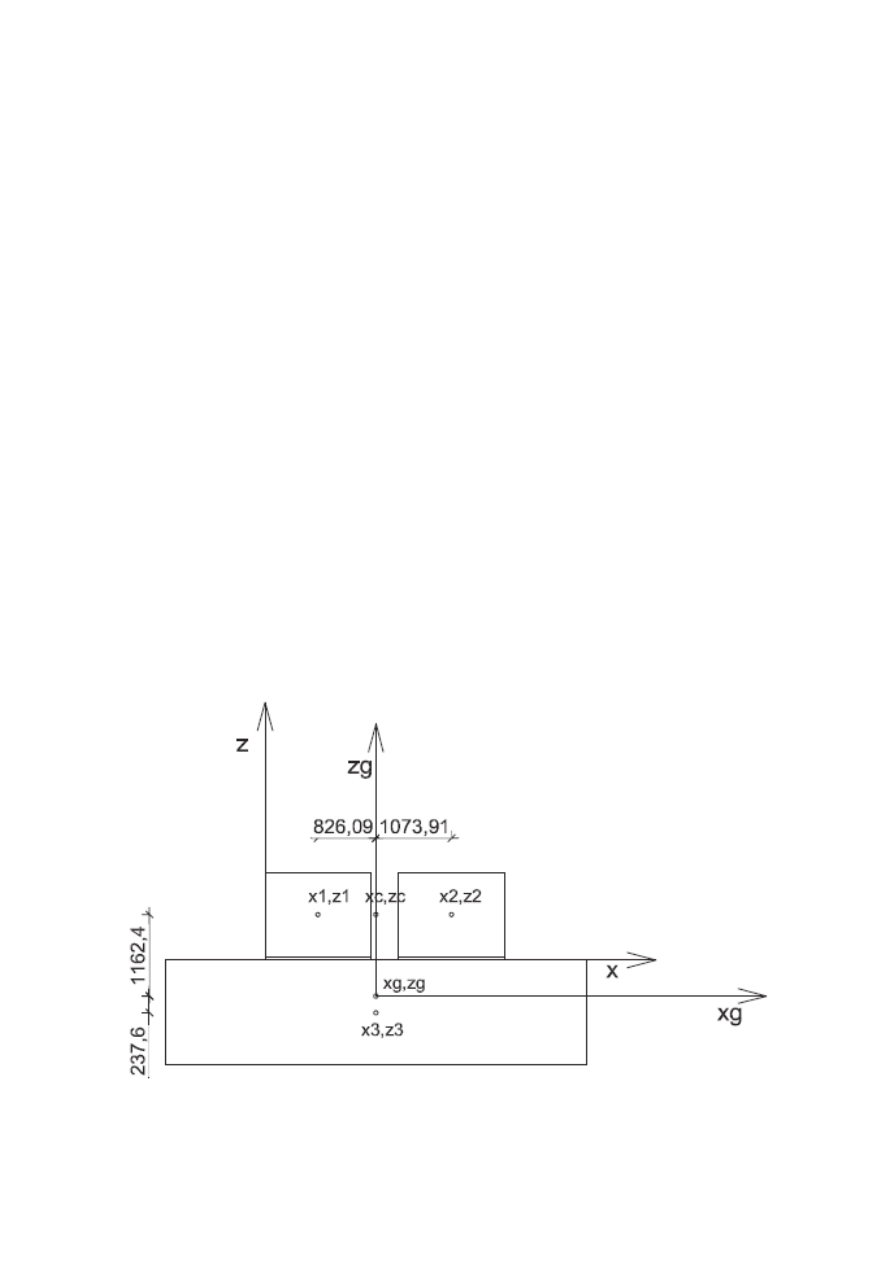
2.3. Wyznaczenie głównego środka ciężkości:
2

C
i
i
G
G
G
G
M
m
x
X
)
Z
,
X
(
S
∑
⋅
=
C
i
i
G
M
m
z
Z
∑
⋅
=
M
c
= m
1
+ m
2
M
c
= 6,5 + 5,0= 11,5Mg
m
4
= 56,25 Mg
S
c
X
c
, Z
c
X
c
=
3000
∗11,53000∗56,25
67,75
=3000mm
Z
c
=
2150∗11,5750∗56,25
67,75
=987,6mm
3
3.Wyznaczenie momentów bezwładności mas układu względem płaszczyzn i osi
głównych.
3.1. Momenty bezwładności mas względem płaszczyzn głównych:
3.1.1.Prostopadłościan o wymiarach w kierunku poszczególnych osi: l, b, h:
12
h
m
Y
X
2
1
1
⋅
=
Θ
12
l
m
Z
Y
2
1
1
⋅
=
Θ
12
b
m
Z
X
2
1
1
⋅
=
Θ
•
Fundament:
d
4
= 2500mm
l
4
= 6000mm
h
4
= 1500mm
m
4
= 56,25Mg
X
1
Y
1
=
56,25
∗1,5
2
12
=10,5469Mg m
2
Y
1
Z
1
=
56,25
∗6,0
2
12
=168,75Mg m
2
X
1
Z
1
=
56,25
∗2,5
2
12
=29,2969 Mg m
2
3.1.2.Walec o średnicy d i długości l usytuowany wzdłuż osi x
0
:
16
d
m
Y
X
2
1
1
⋅
=
Θ
12
l
m
Z
Y
2
1
1
⋅
=
Θ
16
d
m
Z
X
2
1
1
⋅
=
Θ
•
Silnik:
d
1
= 1200mm
l
1
= 1500mm
m
1
= 6,5Mg
X
1
Y
1
=
6,5
∗1,2
2
16
=0,585 Mg m
2
Y
1
Z
1
=
6,5
∗1,5
2
12
=1,21875 Mg m
2
X
1
Z
1
=
6,5
∗1,2
2
16
=0,585 Mg m
2
•
Wentylator:
d
2
= 1200mm
l
2
= 1500mm
m
2
= 5,00Mg
X
1
Y
1
=
5,0
∗1,2
2
16
=0,45 Mg m
2
Y
1
Z
1
=
5,0
∗1,5
2
12
=0,9375Mg m
2
X
1
Z
1
=
5,0
∗1,2
2
16
=0,45 Mg m
2
4
3.2.Momenty bezwładności mas względem płaszczyzn w układzie współrzędnych
przesuniętych o wektor [X, Y, Z]:
2
1
1
0
0
Z
m
Y
X
Y
X
⋅
+
Θ
=
Θ
2
1
1
0
0
X
m
Z
Y
Z
Y
⋅
+
Θ
=
Θ
2
1
1
0
0
Y
m
Z
X
Z
X
⋅
+
Θ
=
Θ
•
Silnik:
X
0
Y
0
= X
1
Y
1
mZ
2
=0,5856,5∗1,1624
2
=9,3676Mg m
2
Y
0
Z
0
=Y
1
Z
1
mZ
2
=1,218756,5∗0,82609
2
=5,6545Mg m
2
X
0
Z
0
= X
1
Z
1
mZ
2
=0,5856,5∗0
2
=0,585Mg m
2
•
Wentylator:
X
0
Y
0
= X
1
Y
1
mZ
2
=0,455,0∗1,1624
2
=7,2059Mg m
2
Y
0
Z
0
=Y
1
Z
1
mZ
2
=0,93755,0∗1,07391
2
=6,7039Mg m
2
X
0
Z
0
= X
1
Z
1
mZ
2
=0,455,0∗0
2
=0,45 Mg m
2
•
Fundament:
X
0
Y
0
= X
1
Y
1
mZ
2
=10,548956,25∗0,2376
2
=13,7244 Mg m
2
Y
0
Z
0
=Y
1
Z
1
mZ
2
=168,7556,25∗0
2
=168,75Mg m
2
X
0
Z
0
= X
1
Z
1
mZ
2
=29,296956,25∗0
2
=29,2969Mg m
2
5
3.3.Momenty bezwładności mas względem osi głównych:
∑ Θ
+
∑ Θ
=
Θ
0
0
0
0
0
Z
X
Y
X
X
∑ Θ
+
∑ Θ
=
Θ
0
0
0
0
0
Z
Y
Y
X
Y
0
0
0
0
0
Z
X
Z
Y
Z
∑ Θ
+
∑ Θ
=
Θ
X
0
=9,36767,205913,72440,5850,4529,2969=60,6298Mg m
2
Y
0
=9,36767,205913,72445,65456,7039168,75=211,4063Mg m
2
Z
0
=5,65456,7039168,750,5850,4529,2969=211,4403Mg m
2
4.Dobór liczby sprężyn w wibroizolacji, rozmieszczenie i określenie sztywności
wibroizolacji.
4.1. Dane sprężyny wibroizolacji:
•
średnica pręta: d = 20mm
•
średnica podziałowa: D = 136mm
•
wysokość: H
0
= 265mm
•
liczba zwojów: i
0
= 6,5
4.2. Dopuszczalne obliczeniowe obciążenie jednej sprężyny:
w
k
8
d
R
P
2
t
dop
⋅
⋅
⋅
π
⋅
=
R
t
– wytrzymałość obliczeniowa stali sprężynowej na skręcanie, R
t
= 730,0MPa
d – średnica pręta sprężyny [mm]
w – wskaźnik sprężyny, w = D/d
w
=
D
d
=
136
20
=6,8
k – współczynnik poprawkowy uwzględniający nierównomierny stan naprężeń w przekroju
sprężyny
k
=1
5
4
1
w
7
8
1
w
2
1
w
3
=1
5
4
1
6,8
7
8
1
6,8
2
1
6,8
3
=1,2059
P
dop
=
0,73
∗3,14∗20
2
8∗1,2059∗6,8
=13,98
4.3. Wymagana ilość sprężyn w układzie z uwzględnieniem 15% rezerwy obciążenia:
dop
min
P
85
,
0
Q
n
⋅
=
Q – ciężar całkowity układu
Q = M·g
M = m
1
+ m
2
+ m
4
= 6,5 + 5,0 + 56,25 = 67,75Mg
2
s
m
81
,
9
g
=
Q = 67,75·9,81 = 664,6275kN
n
min
=
664,6275
0,85∗13,98
=55,93
6
Przyjęto ilość sprężyn: n = 56szt.
4.4. Sztywność wibroizolacji:
•
sztywność pionowa:
3
Z
w
i
8
d
G
n
K
⋅
⋅
⋅
⋅
=
n – przyjęta całkowita ilość sprężyn w wibroizolacji układu,
G – moduł sprężystości poprzecznej stali sprężynowej, G = 78500MPa
d – średnica pręta sprężyny,
i – liczba pracujących zwojów sprężyny, i = i
0
– 1,5 = 6,5 – 1,5 = 5
w – wskaźnik sprężyny, w = D/d
w
=
D
d
=
136
20
=6,8
K
z
=
56
∗78500∗20
8∗5∗6,8
3
=6990,38
kN
m
•
sztywność pozioma:
K
x
= K
y
zależy od stosunków:
st
st
H
f
oraz
D
H
st
określa się na podstawie rysunku 19 normy PN-80/B-03040
f
st
– ugięcie statyczne sprężyny,
f
st
=
Q
K
z
=
664,6275
6990,38
=0,095m=95mm
H
st
– wysokość sprężyny obciążonej,
H
st
= H
0
– f
st
= 265 – 95 = 170mm
7

D – średnica podziałowa sprężyny
f
st
H
st
=
95,0
170
=0,56
oraz
H
st
D
=
170
136
=1,25
Przyjęto:
K
x
K
z
=
K
y
K
z
=0,75
K
x
=0,75K
z
=0,75∗6990,38=5242,785
kN
m
•
rozmieszczenie wibroizolacji:
•
sztywności wahadłowe:
K
ϕ
xz
= K
z
’
⋅
Σ
x
i
2
K
ϕ
yz
= K
z
’
⋅
Σ
y
i
2
K
z
’– sztywność pionowa jednego wibroizolatora [kN/m],
x
i
– współrzędna x wibroizolatora od osi ciężkości układu [m],
8
y
i
– współrzędna y wibroizolatora od osi ciężkości układu [m]
n – liczba wibroizolatorów
K
z
=
K
z
n
=
6990,38
14
=499,31
kN
m
Nr
wibroizolatora
x
ki
[m]
x
2
ki
[m
2
]
y
ki
[m]
y
2
ki
[m
2
]
x
ki
⋅
y
ki
[m
2
]
1
-2,5
6,25
-0,85
0,7225
2,13
2
-1,25
1,5625
-0,85
0,7225
1,0625
3
0
0
-0,85
0,7225
0
4
1,25
1,5625
-0,85
0,7225
-2,13
5
2,5
6,25
-0,85
0,7225
-1,0625
6
-2,5
6,25
0
0,7225
0
7
-1,25
1,5625
0
0,7225
0
8
1,25
1,5625
0
0,7225
0
9
2,5
6,25
0
0,7225
0
1”
-2,5
6,25
0,85
0,7225
-2,13
2”
-1,25
1,5625
0,85
0,7225
-1,0625
3”
0
0
0,85
0,7225
0
4”
1,25
1,5625
0,85
0,7225
1,0625
5”
2,5
6,25
0,85
0,7225
2,13
Σ
0
46,88
0
10,12
0
K
ϕ
xz
= 499,31
⋅
46,88 = 23407,65kNm
K
ϕ
yz
= 499,31
⋅
10,12 = 5053,02kNm
•
sztywność skrętna
K
ψ
= K
x
’
⋅
(
Σ
x
i
2
+
Σ
y
i
2
)
K
x’
– sztywność pozioma jednego wibroizolatora
K
x’
= 0,75 · K
z
’ = 0,75
⋅
499,31 = 374,4825
m
kN
K
ψ
= 374,4825
⋅
(46,88 + 10,12) = 21345,5025kNm
5.Określenie częstotliwości drgań własnych układu
5.1. Prędkości kątowe drgań własnych-scentrowanego bloku fundamentowego opartego na
sprężystym podłożu gruntowym wyznacza się w [rad/s] wg wzorów:
•
Prędkość kątowa drgań własnych pionowych:
z
=
K
z
M
=
6990,38
67,75
=10,16
rad
s
9
•
Prędkość kątowa drgań własnych skrętnych:
=
K
Z0
=
21345,2025
211,4403
=10,047
rad
s
•
Prędkości kątowe drgań własnych w płaszczyźnie podłużnej:
(
)
µ
⋅
µ
+
λ
−
λ
±
λ
+
λ
=
λ
b
a
2
2
xz
2
x
2
xz
2
x
2
2
,
1
4
2
1
x
2
=
K
x
M
=
5242,785
67,75
=77,38
xz
2
=
K
xz
s
z
2K
∗K
x
Y0
=
23407,651,0926
2
∗5242,785
211,4063
=140,356
- prędkości kątowe drgań podukładów
s – odległość między środkiem ciężkości i środkiem sztywności układu
10
a
=
sK
x
M
=
1,0926
∗5242,785
67,75
=84,55
kN
Mg
b
=
sK
x
Y0
=
1,0926
∗5242,785
211,4063
=27,096
kN
Mg
1
2
=
1
2
[
x
2
xz
2
x
2
−
xz
2
2
4
a
b
]
1
2
=
1
2
[77,38140,356
77,38−140,356
2
4∗84,55∗27,096]=174,243
rad
s
2
2
=
1
2
[
x
2
xz
2
x
2
−
xz
2
2
4
a
b
]
2
2
=
1
2
[77,38140,356−
77,38−140,356
2
4∗84,55∗27,096]=43,4925
rad
s
11
•
Prędkości kątowe drgań własnych w płaszczyźnie poprzecznej:
(
)
µ
⋅
µ
+
λ
−
λ
±
λ
+
λ
=
λ
b
a
2
2
yz
2
y
2
yz
2
y
2
4
,
3
4
2
1
x
2
=
K
x
M
=
5242,785
67,75
=77,3842
xz
2
=
K
xz
s
z
2K
∗K
x
X0
=
23407,651,0926
2
∗5242,785
60,6298
=489,3032
- prędkości kątowe drgań podukładów
s – odległość między środkiem ciężkości i środkiem sztywności układu
a
=
sK
y
M
=
1,0926
∗5242,785
67,75
=84,55
kN
Mg
b
=
sK
y
X0
=
1,0926
∗5242,785
60,6298
=94,4794
kN
Mg
3
2
=
1
2
[
x
2
xz
2
x
2
−
xz
2
2
4
a
b
]
3
2
=
1
2
[77,3842489,3032
77,3842−489,3032
2
4∗84,55∗94,4794]=507,859
rad
s
2
2
=
1
2
[
x
2
xz
2
x
2
−
xz
2
2
4
a
b
]
2
2
=
1
2
[77,3842489,3032−
77,3842−489,3032
2
4∗84,55∗94,4794]=58,827
rad
s
6.Wyznaczenie amplitud drgań.
n
m
- prędkość obrotowa maszyny, n
m
= 500 obr/min
f
m
– częstotliwość drgań własnych
f
m
=
n
m
60
=
500
60
=8,33Hz
=2 f
m
=2∗3,14∗8,33=52,32
rad
s
Wyznaczanie sił wzbudzających:
P
d
=0,1G
w
- dla maszyn o prędkości obrotowej do 500 obr/min
Silnik:
G
ws
=0,5G
s
G
s
=6,5Mg=63,765kN
G
ws
=0,5∗6,5Mg=31,8825 kN
Pds
=0,10∗0,5∗6,5=3,18825 kN
12
Wentylator:
G
ws
=0,5G
s
G
s
=5,0Mg=49,05 kN
G
ws
=0,5∗5,0Mg=24,525kN
Pds
=0,10∗0,5∗5,0=2,4525kN
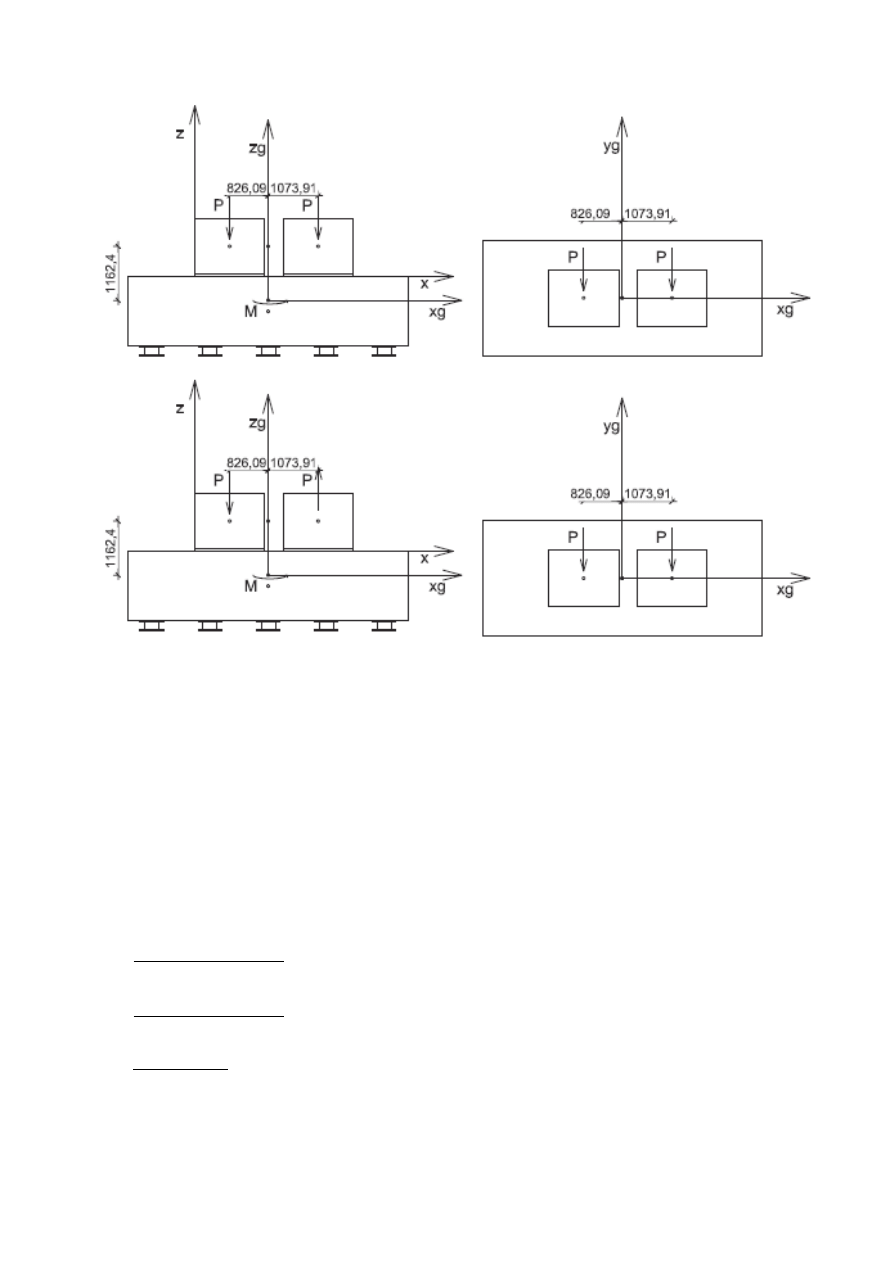
Wyznaczenie amplitud drgań:
Schemat I
x
s
= 0,826 m
x
w
= 1,079 m
P
z max
= P
ds
+ P
dw
= 3,188 + 2,453 = 5,641 kN
M
y0
= P
ds
· x
s
- P
dw
· x
w
= 3,188 · 0,826 – 2,453 · 1,079 = -0,013 kNm
Schemat II
x
s
= 0,826 m
x
w
= 1,079 m
P
z
= P
ds
- P
dw
= 3,188 – 2,453 = -0,735 kN
M
y0 max
= P
ds
· x
s
+ P
dw
· x
w
= 3,188 · 0,826 +2,453 · 1,079 = 5,28 kNm
•
Schemat III
x
s
= 0,826 m
x
w
= 1,079 m
z
s
= 1,162 m
P
y
= P
ds
- P
dw
= 3,188 – 2,453 = -0,735 kN
M
x0
= (P
ds
- P
dw
) · z
s
= (3,188 – 2,453) · 1,162 = 0,854 kNm
M
z0
= P
ds
· x
s
+ P
dw
· x
w
= 3,188 · 0,826 +2,453 · 1,079 = 5,28 kNm
•
Schemat IV:
x
s
= 0,826 m
x
w
= 1,079 m
z
s
= 1,162 m
P
y
= P
ds
+ P
dw
= 3,188 + 2,453 = 5,641 kN
M
x0
= (P
ds
+ P
dw
) · z
s
= (3,188 + 2,453) · 1,162 = 6,555 kNm
M
z0
= P
ds
· x
s
- P
dw
· x
w
= 3,188 · 0,826 – 2,453 · 1,079 = -0,013 kNm
13
Wyznaczenie cząstkowych drgań wymuszonych wibroizolowanego układu, bez uwzględnienia
tłumienia, gdy środki ciężkości układu i sztywności wibroizolatorów nie znajdują się w jednym
punkcie:
Założono, że wszystkie obciążenia działają z funkcją sinus:
Amplitudy cząstkowe obrotowe względem osi:
•
Składowe sinusowe:
rad
,
s
K
'
P
B
'
M
'
x
x
y
y
0
y
x
0
x
0
ϕ
∆
⋅
⋅
+
⋅
=
ϕ
rad
,
s
K
'
P
B
'
M
'
y
y
x
x
0
x
y
0
y
0
ϕ
∆
⋅
⋅
+
⋅
=
ϕ
rad
,
)
1
(
K
'
M
'
2
z
z
0
z
0
ϕ
Ψ
η
−
⋅
=
ϕ
K
ϕ
xz
= 499,31
⋅
46,88 = 23407,65kNm
K
ϕ
yz
= 499,31
⋅
10,12 = 5053,02kNm
14
K
ψ
= 374,4825
⋅
(46,88 + 10,12) = 21345,5025kNm
x
=m
0X
x1
2
−
2
x2
2
−
2
x
=67,75∗60,6298507,859
2
−52,32
2
58,827
2
−52,32
2
=7,580998 10
11
B
x
=K
x
K
y
S
x
2
−
0X
2
B
x
=23407,655242,785∗1,0926
2
−60,6298∗52,32
2
=−1,36310
5
B
x
=K
x
−m
2
=5242,785−67,75∗52,32
2
=−1,8024210
5
y
=m
0y
y1
2
−
2
y2
2
−
2
y
=67,75∗211,4063174,243
2
−52,32
2
43,4925
2
−52,32
2
=−2,29476810
11
B
y
=K
x
K
x
S
y
2
−
0Y
2
B
y
=23407,655242,785∗1,0926
2
−211,4063∗52,32
2
=−5,49033510
5
B
y
=K
y
−m
2
=5242,785−67,75∗52,32
2
=−1,802149 10
5
λ
i
rad/s
n
i
drg/mi
n
f
i
Hz
Λ
z
=10,16
97,07
1,6178
Λ
ψ
=10,047
95,99
1,5998
60
n
f
i
i
=
π
λ⋅
=
i
i
30
n
•
Schemat I:
0y
=
M
0y
B
x
y
=
−0,013∗−180242
−2,294768∗10
11
=−1,021081∗10
−8
rad
z
=
z
=
52,32
10,16
=5,149
a
0z
=
P
0z
K
z
1−
z
2
=
5,641
6990,381−5,149
2
=−0,3163∗10
−4
m
•
Schemat II:
0y
=
M
0y
B
x
y
=
5,28∗−180242
−2,294768∗10
11
=−4,147163∗10
−6
rad
z
=
z
=
52,32
10,16
=5,149
a
0z
=
P
0z
K
z
1−
z
2
=−
0,735
6990,381−5,149
2
=0,4121∗10
−5
m
15
•
Schemat III:
0x
=
M
0x
B
y
P
0Y
K
y
s
x
x
=
0,854∗−180214−0,735∗5242,785∗1,0926
7,580998∗10
11
0x
=−2,085649∗10
−7
rad
a
0y
=
p
0y
B
y
M
0X
K
y
s
x
x
=−
0,735
∗−1802140,854∗5242,785∗1,0926
7,580998∗10
11
a
0y
=1,811759∗10
−7
rad
z
=
z
=
52,32
10,16
=5,149
0z
=
M
0z
K
z
1−
z
2
=
5,28
6990,381−5,149
2
=−2,960637∗10
−5
m
•
Schemat IV:
0x
=
M
0x
B
y
P
0Y
K
y
s
x
x
=
6,555∗−1802145,641∗5242,785∗1,0926
7,580998∗10
11
0x
=−1,515618∗10
−6
rad
a
0y
=
p
0y
B
y
M
0X
K
y
s
x
x
=
5,641
∗−1802146,555∗5242,785∗1,0926
7,580998∗10
11
a
0y
=−1,291437∗10
−6
rad
z
=
z
=
52,32
10,16
=5,149
0z
=
M
0z
K
z
1−
z
2
=−
0,013
6990,381−5,149
2
=7,289448∗10
−8
m
Wyznaczenie amplitud przesunięć dowolnego punktu i układu o współrzędnych x
0i
, y
0i
, z
0i
przy działaniu składowej sinusowej:
Współrzędne punktów skrajnych układu wibroizolowanego:
x
0i
= ±3000mm
y
0i
= ±1250mm
z
0i
= +512,4mm
z
0i
= -987,6mm
a
xi
=a
0x
oy
Z
oy
−
0z
y
0i
a
xi
=−2,085649∗10
−7
−4,147163∗10
−6
∗0,5124
−−2,96063710∗10
−5
∗−1,25=−0,3934∗10
−4
a
xi
=39,34 m
16
a
yi
=a
0y
oz
X
oi
−
0x
Z
0i
a
yi
=−1,291437∗10
−6
−2,960637∗10
−5
∗3,00
−−2,085649∗10
−7
∗−0,9876=−0,9032∗10
−4
a
yi
=90,32 m
a
zi
=a
0z
ox
Y
oi
−
0y
X
0i
a
zi
=−0,3163∗10
−4
−2,085649∗10
−7
∗1,25
−−4,147163∗10
−6
∗−3,00=−0,4433∗10
−4
a
zi
=44,33m
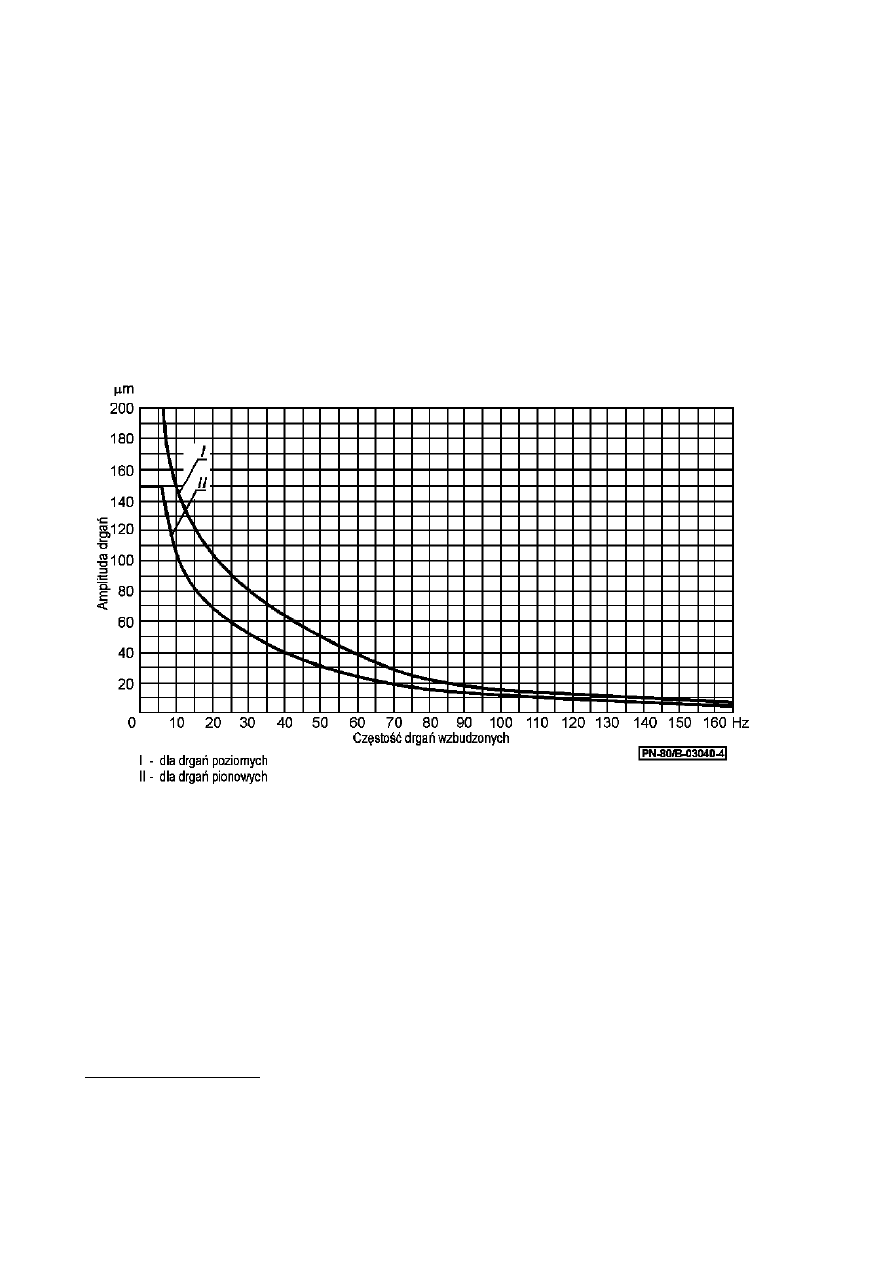
Wartości porównano z wartościami dopuszczalnymi (rys. 4 PN-80/B-03040):
Odczytano dla częstości wzbudzającej 8,33Hz (500obr/min):
•
Dla drgań poziomych:
a
xi
=39,34a
dop
=155 m
a
yi
=90,32a
dop
=155 m
•
Dla drgań pionowych:
a
zi
=44,33a
dop
=108m
Warunki spełnione.
17
Document Outline
Wyszukiwarka
Podobne podstrony:
Fundament na wibroizolatorze1
Fundament na wibroizolatorze
Fundament na wibroizolatorze (2)
Fundament na wibroizolatorze6
Fundament na gruncie
posadowienie fundamentu na palach cfa przykład obliczeń
Fundamenty - cz.1, Płyty fundamentowe na powierzchni gruntu, Płyty fundamentowe na powierzchni grunt
22 Pale i fundamenty na palach rodzaje, zastosowania i technologie,
PALE I FUNDAMENTY NA PALACH, Fundamentowanie, Od Walliego
22 Pale i fundamenty na palach rodzaje, zastosowania i technologie,
Fundamenty na podlozu sprezysty Nieznany
fundament na studniach i kesonach, TECHNIK DROGOWNICTWA, ZAWODOWE, Mosty, Fundamenty- opisy, materia
Fundamenty na palach, Budownictwo0, Mechanika gruntów
Fundament na palach
więcej podobnych podstron