AKADEMIA
GÓRNICZO – HUTNICZA
im. Stanisława Staszica w Krakowie
Wydział:
Inżynierii Mechanicznej i Robotyki
PODSTAWY ROBOTYKI
Prowadzący:
dr inż. Tomasz Buratowski
Kierunek:
Mechatronika
Grupa: 23
Student:
Rafał Dobosz
Numer indeksu: 215400
Ocena:
Projekt: Dynamika manipulatorów
Zadanie polega na rozwiązania dynamiki prostej manipulatorów,
czyli wyznaczenia dynamicznych równań ruchu, wykorzystując
równania Lagrange’a II rodzaju.
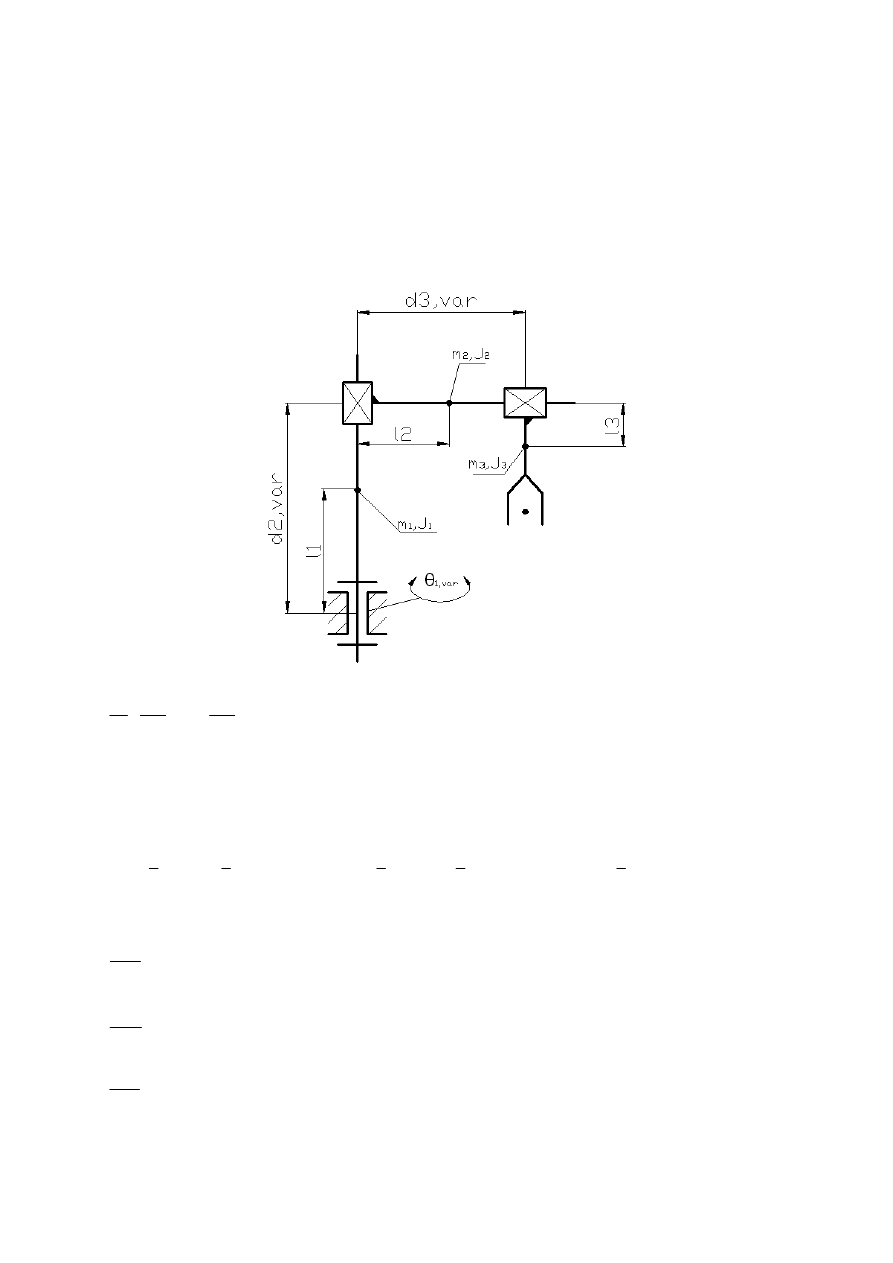
I. Manipulator nr 1
i
d
L
L
Q
dt
q
q
∂
∂
−
=
∂
∂
ɺ
( , )
i
i
L q q
E
V
=
−
ɺ
, gdzie:
E – całkowita energia kinematyczna układu
V – całkowita energia potencjalna układu
(
)
(
)
2
2
2
2
2
2
2
1 1
2
2 2
1
2 2
3
3 3
1
3 3
1
1
1
1
1
2
2
2
2
2
E
J
J
m l
m d
J
m d
m d
θ
θ
θ
=
+
+
+
+
+
+
ɺ
ɺ
ɺ
ɺ
ɺ
(
)
1 1
2
2
3
2
3
V
m gl
m gd
m g d
l
=
+
+
−
1
0
L
θ
∂
=
∂
(
)
2
3
2
L
m
m
g
d
∂
= −
+
∂
2
3 3 1
3
L
m d
d
θ
∂
=
∂
ɺ
(
)
(
)
2
2
1 1
2
2 2
1
3
3 3
1
1
L
J
J
m l
J
m d
θ
θ
θ
θ
∂
=
+
+
+
+
∂
ɺ
ɺ
ɺ
ɺ
2 2
2
L
m d
d
∂
=
∂
ɺ
ɺ
3 3
3
L
m d
d
∂
=
∂
ɺ
ɺ
(
)
(
)
2
2
1 1
2
2 2
1
3 3 3 1
3
3 3
1
1
2
d
L
J
J
m l
m d d
J
m d
dt
θ
θ
θ
θ
θ
∂
=
+
+
+
+
+
∂
ɺɺ
ɺɺ
ɺ ɺ
ɺɺ
ɺ
2 2
2
d
L
m d
dt
d
∂
=
∂
ɺɺ
ɺ
3 3
3
d
L
m d
dt
d
∂
=
∂
ɺɺ
ɺ
Dynamiczne równania ruchu:
(
)
(
)
2
2
1 1
2
2 2
1
3 3 3 1
3
3 3
1
1
2
J
J
m l
m d d
J
m d
θ
θ
θ
θ
τ
+
+
+
+
+
=
ɺɺ
ɺɺ
ɺ ɺ
ɺɺ
(
)
2 2
2
3
2
m d
m
m
g
τ
+
+
=
ɺɺ
2
3 3
3 3 1
3
m d
m d θ
τ
−
=
ɺɺ
ɺ
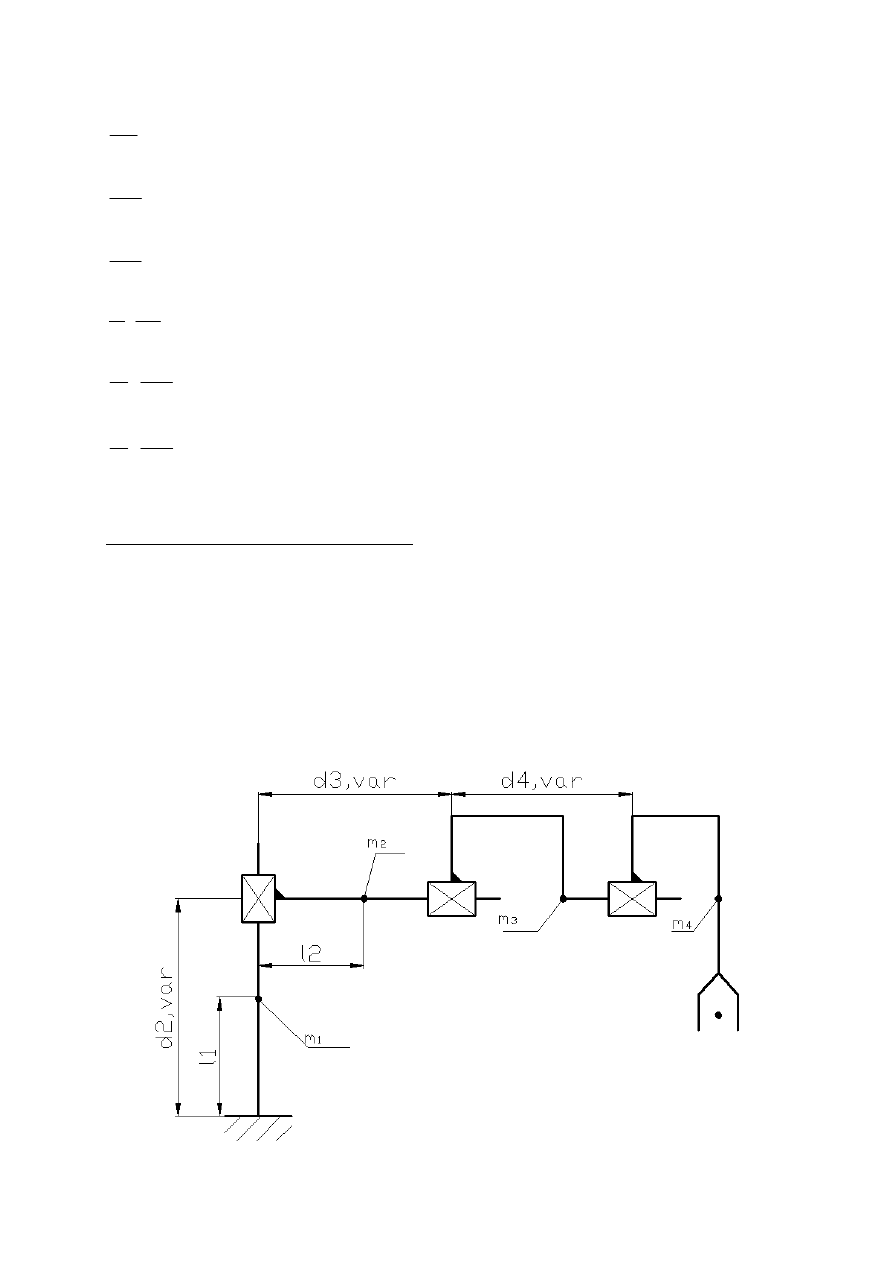
II. Manipulator nr 2
(
)
(
)
2
2
2
2
3
4
2
3
4
3
4 4
1
1
1
2
2
2
E
m
m
m
d
m
m
d
m d
=
+
+
+
+
+
ɺ
ɺ
ɺ
(
)
1 1
2
3
4
2
V
m gl
m
m
m
gd
=
+
+
+
(
)
2
3
4
2
L
m
m
m
g
d
∂
= −
+
+
∂
3
0
L
d
∂
=
∂
4
0
L
d
∂
=
∂
(
)
2
3
4
2
2
L
m
m
m
d
d
∂
=
+
+
∂
ɺ
ɺ
(
)
3
4
3
3
L
m
m
d
d
∂
=
+
∂
ɺ
ɺ
4 4
4
L
m d
d
∂
=
∂
ɺ
ɺ
(
)
2
3
4
2
2
d
L
m
m
m
d
dt
d
∂
=
+
+
∂
ɺɺ
ɺ
(
)
3
4
3
3
d
L
m
m
d
dt
d
∂
=
+
∂
ɺɺ
ɺ
4 4
4
d
L
m d
dt
d
∂
=
∂
ɺɺ
ɺ
Dynamiczne równania ruchu:
(
)
(
)
2
3
4
2
2
3
4
1
m
m
m
d
m
m
m
g
τ
+
+
+
+
+
=
ɺɺ
(
)
3
4
3
2
m
m
d
τ
+
=
ɺɺ
4 4
3
m d
τ
=
ɺɺ
Wyszukiwarka
Podobne podstrony:
moj dynamika
Dynamika1
cz 1, Matlab moj
Mój świat samochodów
82 Dzis moj zenit moc moja dzisiaj sie przesili przeslanie monologu Konrada
Techniki wywierania wplywu oparte na dynamice interakcji
Analiza dynamiczna chodu w fazie podporu
moj 2008 09
Mój region w średniowieczu
dynamika bryly sztywnej(1)
Dziś przychodzę Panie mój
Mój Mistrzu
Kurs 03 Dynamika
Parzuchowski, Purek ON THE DYNAMIC
Jezu, mój Jezu
więcej podobnych podstron