Mechanika budowli
Metoda sił – przykład ramy z ukośnymi prętami
Przykład zaczerpnięto z książki „Podstawy mechaniki budowli” M. Palucha
Temat:
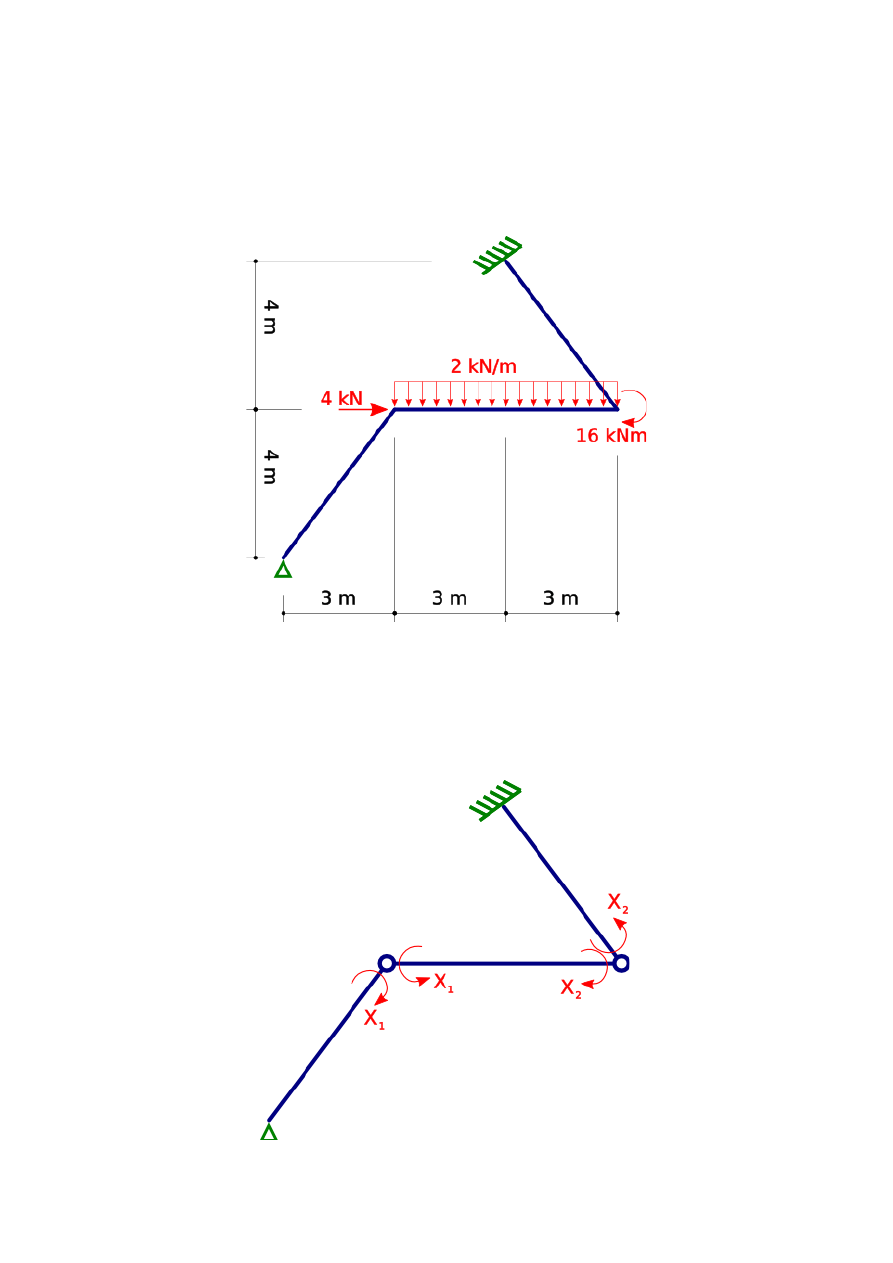
Skonstruuj wykres momentów zginających dla statycznie niewyznaczalnej ramy jak na Rys. 1.
Rys. 1. Rama statycznie niewyznaczalna
Stopień statycznej niewyznaczalności dla rozważanej ramy wynosi SNS=2. W celu skonstruowania
układu podstawowego należy więc z układu odrzucić dwa więzy zewnętrzne lub wewnętrzne. W
tym przykładzie ze względu na proste rachunki na etapie wyprowadzania macierzy podatności i
wektora wyrazów wolnych zdecydowano się na przyjęcie układu podstawowego jak na Rys. 2.
Rys. 2. Układ podstawowy
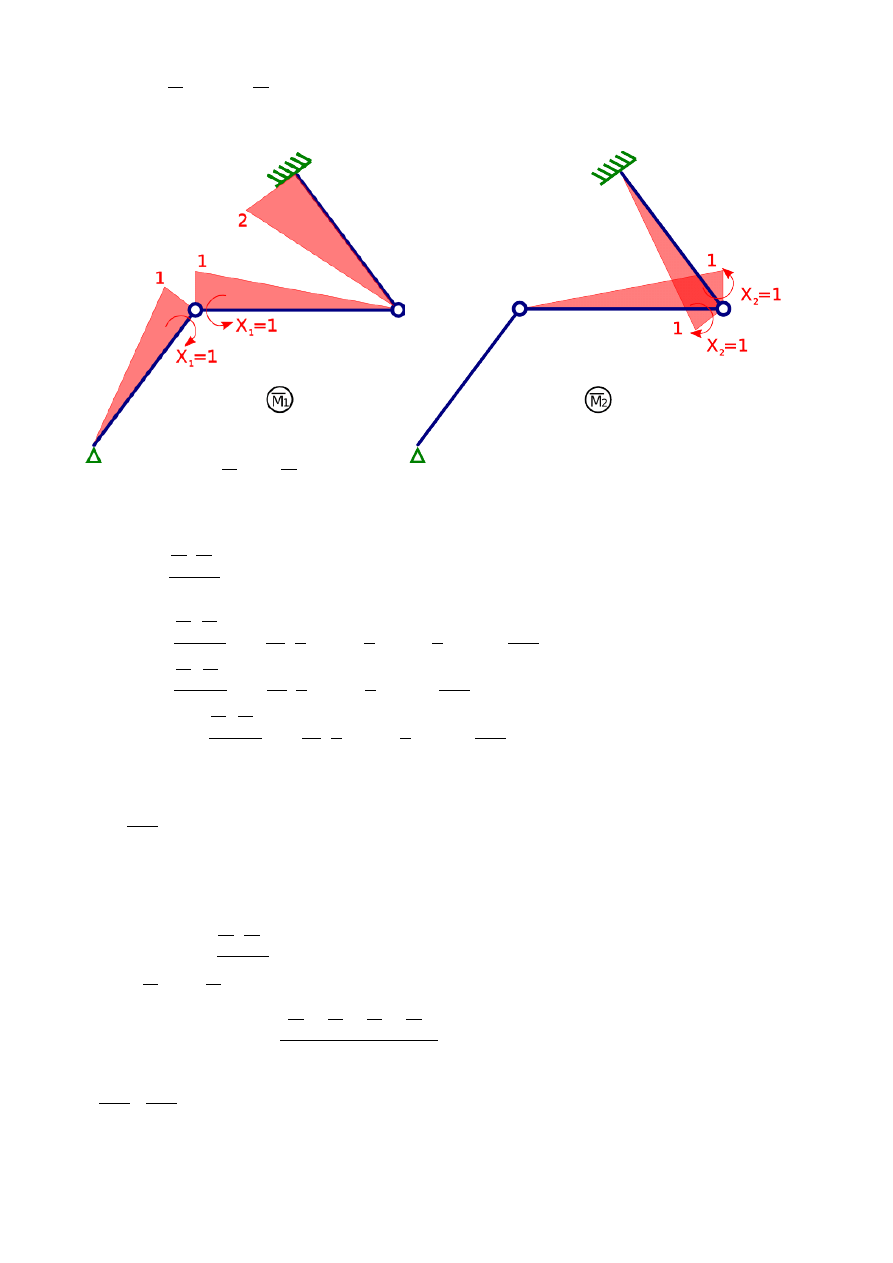
Wykresy
M
1
oraz M
2
od obciążeń jednostkowych na kierunkach niewiadomych X
1
i
X
2
są przedstawione na Rys. 2.
Rys. 3. Wykresy M
1
i M
2
Przemieszczenia na kierunkach niewiadomych
X
1
i
X
2
wywołane jednostkowymi
obciążeniami na tych samych kierunkach można obliczyć ze wzoru:
δ
ij
=
∑∫
M
i
M
j
EI
d s
δ
11
=
∑∫
M
1
M
1
EI
d s=
1
EI
(
1
3
1⋅1⋅5+
1
3
1⋅1⋅6+
1
3
2⋅2⋅5
)
=
31
2 EI
δ
22
=
∑∫
M
2
M
2
EI
d s=
1
EI
(
1
3
1⋅1⋅6+
1
3
1⋅1⋅5
)
=
11
3 EI
δ
12
=δ
21
=
∑∫
M
1
M
2
EI
d s=
1
EI
(
1
6
1⋅1⋅6+
1
6
1⋅2⋅5
)
=
8
3 EI
Ostatecznie macierz podatności:
Δ=
1
3 EI
[
31
8
8
11
]
Sprawdzenie 1:
Należy sprawdzić czy zachodzi:
∑
i
∑
j
δ
ij
=
∑∫
M
s
M
s
EI
d s
gdzie M
s
=
∑
i
M
i
czyli w rozwiązywanym zadaniu:
δ
11
+δ
21
+δ
21
+δ
22
=
∑∫
(
M
1
+
M
2
)(
M
1
+
M
2
)
EI
d s
Po podstawieniu wartości liczbowych otrzymujemy
58
3 EI
=
58
3 EI
Wykonywanie tego sprawdzenia jest zalecane zaraz po obliczeniu wszystkich wartości
δ
ij
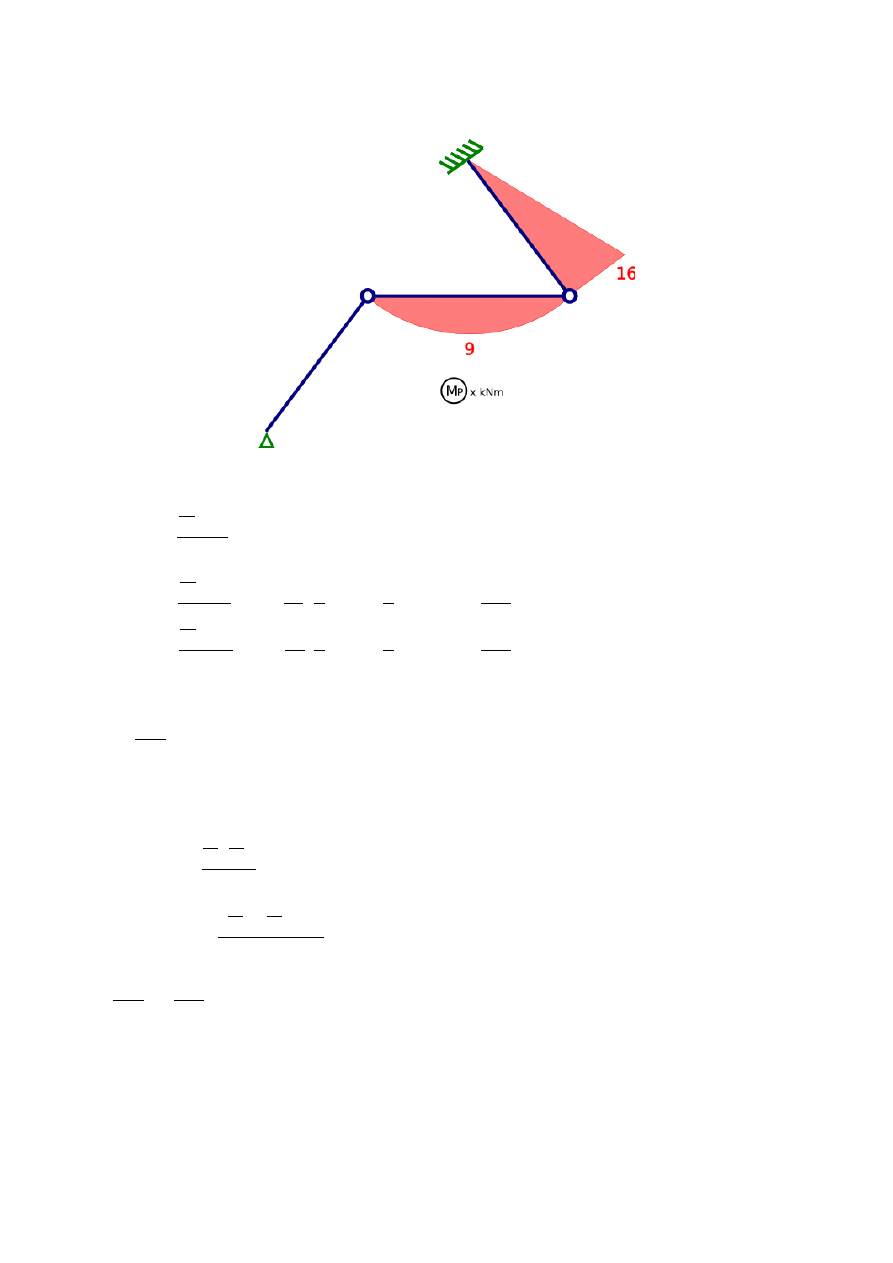
W celu obliczenia przemieszczeń na kierunkach niewiadomych X
1
i X
2
wywołanych
działaniem obciążenia zewnętrznego należy skonstruować wykres
M
P
:
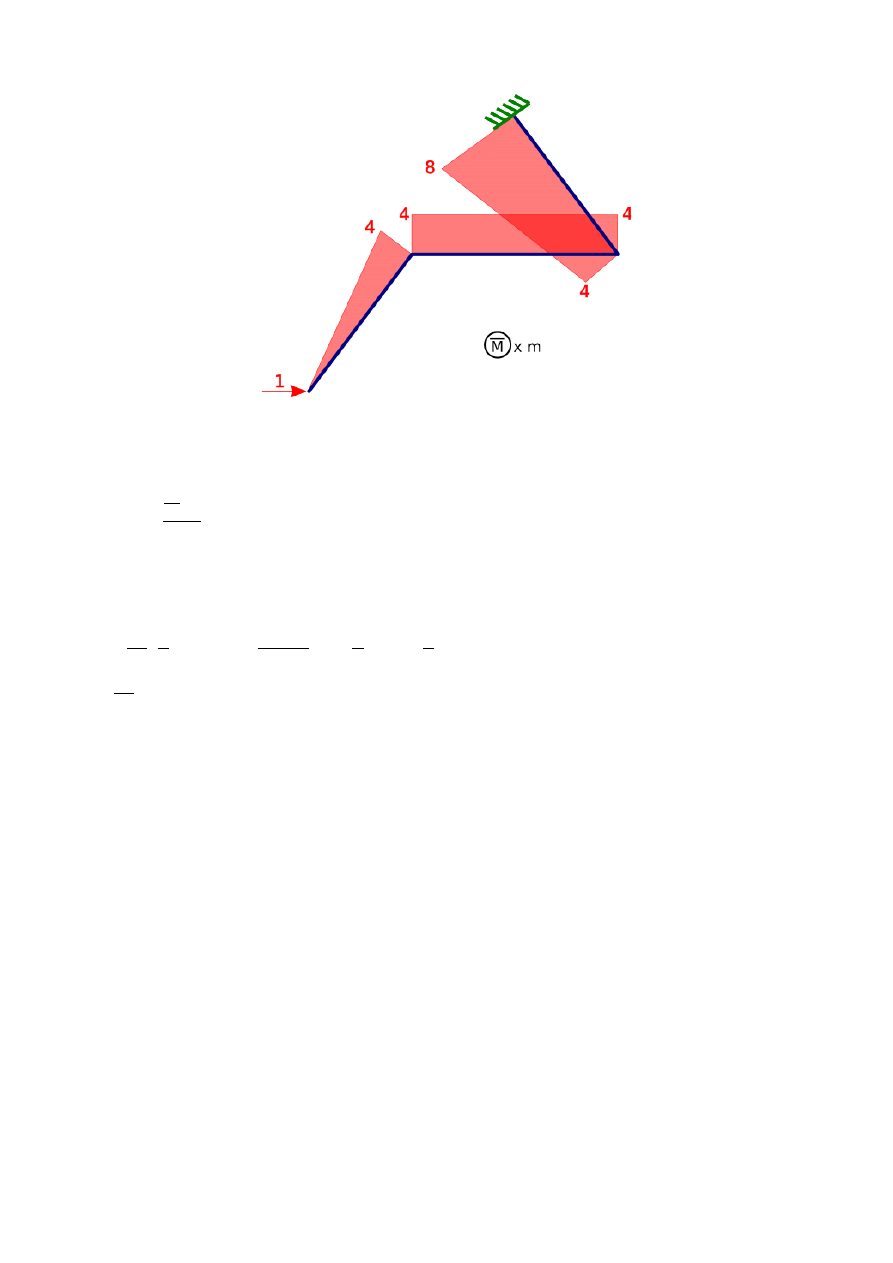
Rys. 4. Wykres M
P
Szukane przemieszczenia
Δ
1P
oraz
Δ
2P
mogą być teraz obliczone ze wzoru:
Δ
iP
=
∑∫
M
i
M
P
EI
d s
Δ
1P
=
∑∫
M
1
M
P
EI
d s=−
1
EI
(
1
3
1⋅9⋅6+
1
6
2⋅16⋅5
)
=−
134
3 EI
Δ
2P
=
∑∫
M
2
M
P
EI
d s=−
1
EI
(
1
3
1⋅9⋅6+
1
3
1⋅16⋅5
)
=−
134
3 EI
Wektor wyrazów wolnych:
Δ
P
=
1
3 EI
[
−
134
−
134
]
Sprawdzenie 2:
Należy sprawdzić czy zachodzi:
∑
i
Δ
iP
=
∑ ∫
M
s
M
P
EI
d s
czyli w rozwiązywanym zadaniu:
Δ
1P
+Δ
2P
=
∑∫
(
M
1
+
M
2
)
M
P
EI
d s
Po podstawieniu wartości liczbowych otrzymujemy
−
268
3 EI
=−
268
3 EI
Wykonywanie tego sprawdzenia jest zalecane zaraz po obliczeniu wszystkich wartości
Δ
iP
Układ równań kanonicznych metody sił przyjmie więc (po przemnożeniu przez 3 EI ) postać:
[
31
8
8
11
]
[
X
1
X
2
]
+
[
−
134
−
134
]
=
[
0
0
]
Co prowadzi do:
[
X
1
X
2
]
=
1
227
[
11 −8
−
8 31
][
134
134
]
[
X
1
X
2
]
=
[
1,451
11,126
]
Końcowy wykres momentów zginających można otrzymać z:
M=
∑
i
M
i
⋅
X
i
+
M
P
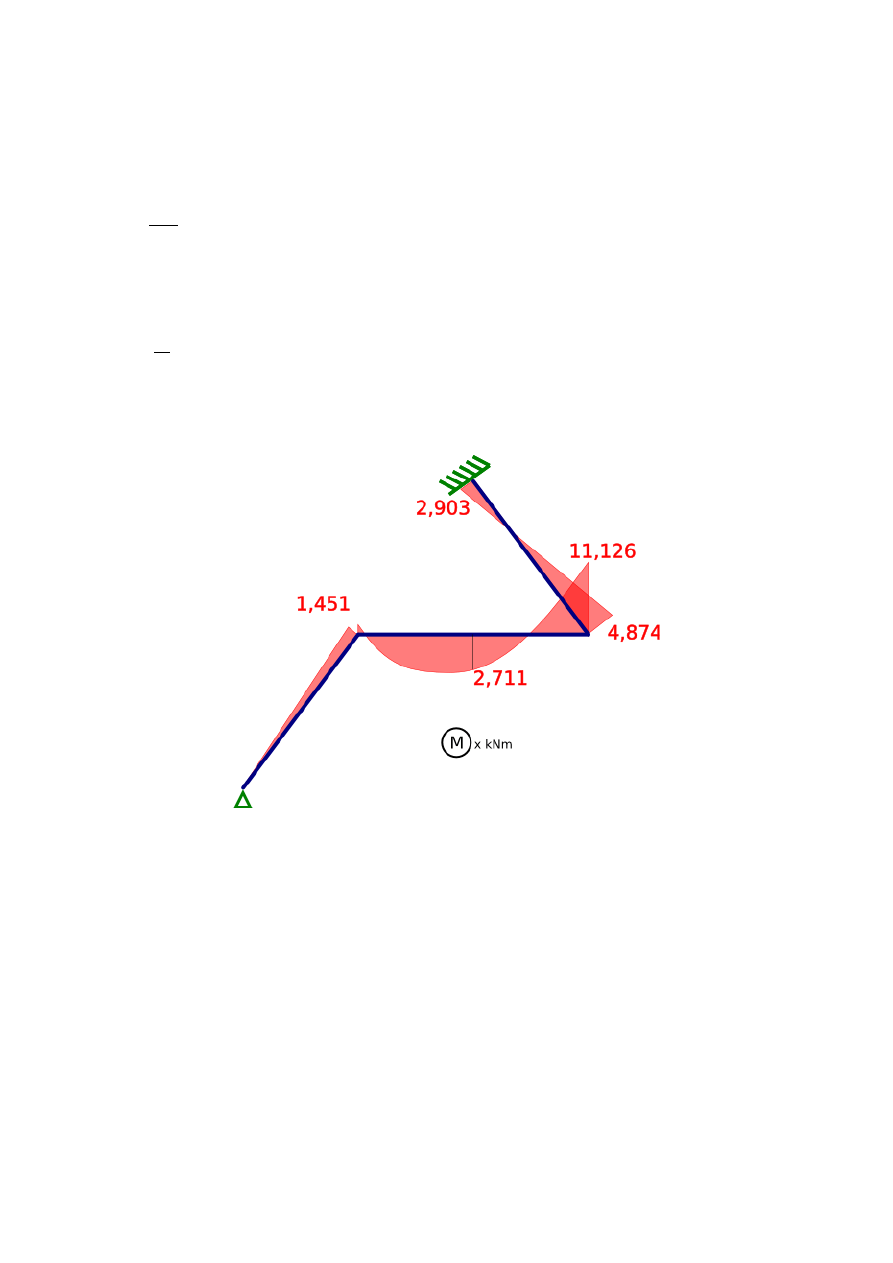
Końcowy wykres momentów zginających jest przedstawiony na Rys. 5.
Rys. 5. Końcowy wykres momentów zginających
Przed przystąpieniem do konstruowania wykresów sił poprzecznych i sił osiowych należy wykonać
sprawdzenie końcowego wykresu momentów zginających.
Sprawdzenie 3:
Sprawdzenie to polega na obliczeniu przemieszczenia rozważanej ramy w kierunku zablokowanym
przez jeden z rzeczywistych więzów. W tym celu należy przyjąć układ podstawowy metody sił
(najlepiej inny niż ten wykorzystany podczas rozwiązywania ramy) i obciążyć go siłą jednostkową
na kierunku jednego z odrzuconych więzów (patrz Rys. 6).
Rys. 6. Wykres momentów zginających od siły
jednostkowej na kierunku odrzuconego więzu
W rozpatrywanym przykładzie poziome przemieszczenie lewego dolnego węzła ramy, zgodnie ze
wzorem redukcyjnym, wynosi:
u=
∑∫
M M
EI
d s
Jeżeli wykres momentów jest skonstruowany prawidłowo to obliczane przemieszczenie musi
uzyskać wartość równą zero.
Δ=
1
EI
(
1
3
4⋅1,451⋅5+
12,578
2
6⋅4−
2
3
9⋅6⋅4+
5
6
(
46,442−38,989+11,610−38,989)
)
=
=
1
EI
(
160,608−160,605)≈0
Oznacza to, że przemieszczenie poziome podpory nieprzesuwnej, obliczone przy zastosowaniu
otrzymanego wcześniej końcowego wykresu momentów zginających, odpowiada wartości
rzeczywistej (podpora nieprzesuwna ma zablokowaną możliwość przesuwu we wszystkich
kierunkach). To z kolei jest przesłanką do uznania otrzymanego wykresu momentów zginających za
prawidłowy.
Wykresy sił poprzecznych i osiowych należy skonstruować samodzielnie.
Wyszukiwarka
Podobne podstrony:
Cw08 Matlab2
instrukcja cw08
Cw08 2, Akademia Morska, 1 rok, Fizyka, FIZYKA1, fiza
mamet cw08, WYDZIAŁ INŻYNIERII PRODUKCJI
IB cw08
C16 2005 cw08
GW CW08 B TRANSP
ELEKTRONIKA cw08 (1)
cw08
cw08 pas2
cw08-1, Studia, Pracownie, I pracownia, 8 Badanie zjawiska rezonansu mechanicznego, 8 Piotr Ludwikow
Cw08 MK2 Operacje 8051
Urz Zew Cw08
cw08 pliki cwo08
Cw08
cw08
cw08 pomiar rezystancji w funkcji temperatury
więcej podobnych podstron