
Marian OSTWALD
PODSTAWY MECHANIKI
MECHANIKA TECHNICZNA
DLA STUDENTÓW
KIERUNKÓW NIEMECHANICZNYCH
Materiały z wykładów
Wersja 02 (
Grudzień 2006)
Państwowa Wyższa Szkoła Zawodowa w Lesznie 2006

01 Wprowadzenie
2
SPIS TREŚCI
1. Wprowadzenie ................................................................................. 1
2. Statyka ........................................................................................... 10
3. Kinematyka .................................................................................... 39
4. Dynamika ....................................................................................... 56
5.
Wytrzymałość materiałów .............................................................. 73
5.1
Rozciąganie prętów ............................................................. 86
5.2
Momenty bezwładności, hipoteza wytrzymałościowa .......... 98
5.3
Skręcanie wałów ................................................................ 106
5.4
Zginanie belek ................................................................... 113
5.5
Wytrzymałość złożona ....................................................... 131
6. Zagadnienia wybrane ................................................................... 136
Opanowanie przedmiotu MECHANIKA TECHNICZNA
wymaga działań w
dwóch kierunkach:
– poznanie i zrozumienia podstaw teoretycznych,
– nabycie praktycznych umiejętności posługiwaniem się wiedzą teoretyczną.
Podstawy teoretyczne to przede wszystkim przyswojenie i zrozumienie podsta-
wowych pojęć związanych z przedmiotem, nabycie umiejętności kojarzenia oraz
zastosowania omawianych zagadnień. To również „wiedza” o tym, gdzie w lite-
raturze można znaleźć szczegółowe informacje (wzory, procedury, przykłady).
Niniejszy materiał zawiera folie prezentowane na wykładach i stanowić może
rodzaj przewodnika
umożliwiający opanowanie teorii. Umiejętności praktyczne
na
być można poprzez analizę przykładów liczbowych, a przede wszystkim
przez SAMODZIELNE ROZWIĄZYWANIE ZADAŃ. Cechą zawodu inżyniera
jest
praktyczne wykorzystywanie swojej wiedzy i umiejętności w działalności
zawodowej, stąd studiowanie MECHANIKI TECHNICZNEJ wymaga uwzględ-
nienia obu tych aspektów.
LITERATURA
Kozak B.: Mechanika techniczna. WSiP, Warszawa2004.
Niezgodziński T.: Mechanika ogólna. Wydawnictwo Naukowe PWN, Warszawa
1999
Ostwald M.: Podstawy wytrzymałości materiałów. Wydawnictwo Politechniki
Poznańskiej, Poznań 2003.
Siuta W.: Mechanika techniczna. WSiP, Warszawa.
Sztryber J. F.: Elementy mechaniki technicznej. Wydawnictwo SGGW, War-
szawa 2004.
01 Wprowadzenie
3
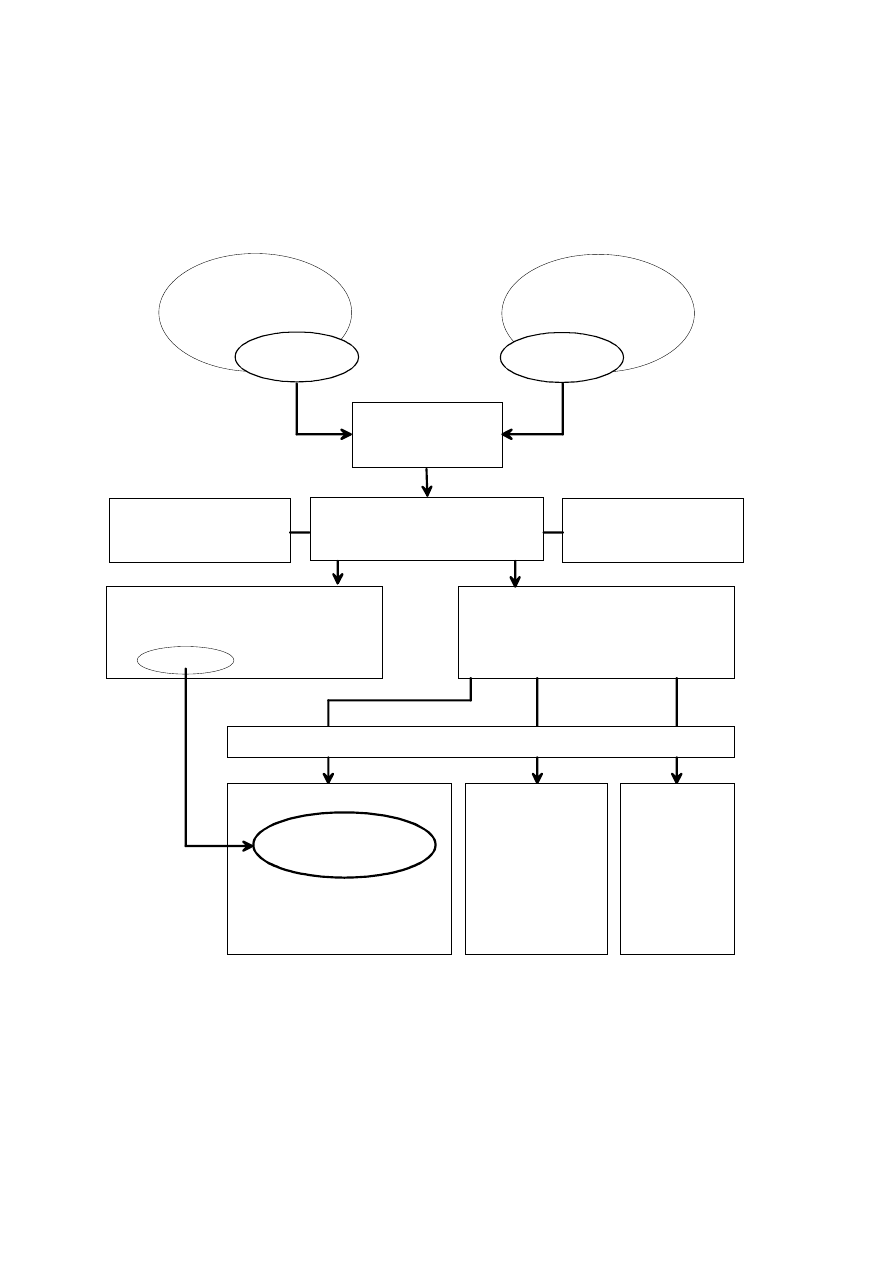
MECHANIKA TECHNICZNA
Struktura przedmiotu
MECHANIKA
TEORETYCZNA
(OGÓLNA)
Fizyka
Matematyka
Mechanika
relatywistyczna
(skala makro, E = mc
2
)
Mechanika
kwantowa
(skala mikro, chaos)
MECHANIKA
STOSOWANA (TECHNICZNA)
(newtonowska)
MECHANIKA
PŁYNÓW:
- hydromechanika
- aeromechanika
MECHANIKA
GRUNTÓW
(budownictwo)
MECHANIKA
CIAŁA SZTYWNEGO:
- dynamika
- kinematyka
- statyka
Doświadczenie
Obserwacja
rzeczywistości
Metody i pojęcia
matematyki
do badania zjawisk
MECHANIKA CIAŁ STAŁYCH
WYTRZYMAŁOŚĆ
MATERIAŁÓW:
MECHANIKA
CIAŁ
ODKSZTAŁCALNYCH:
- teoria sprężystości
- teoria plastyczności
- reologia
- .............

01 Wprowadzenie
4
MECHANIKA TECHNICZNA
Mechanika jest dziedziną nauki zajmującą się badaniem ru-
chu i równowagi ciał materialnych. Ciało materialne jest
myślowym uproszczeniem ciała rzeczywistego. Modele:
punkt materialny
układ punktów materialnych
ciało sztywne
TRADYCYJNY PODZIAŁ MECHANIKI:
STATYKA – badanie warunków równowagi ciał w spo-
czynku.
KINEMATYKA – badanie ruchu ciał bez analizy przyczyn
tego ruchu.
DYNAMIKA – analiza oddziaływań między ciałami oraz
ich skutków.
Ciało doskonale sztywne stanowi przybliżony model ciała
stałego i wystarcza do rozwiązywania wielu ważnych w
praktyce inżynierskiej przypadków ruchu i równowagi.
Podstawowe jednostki miar wielkości fizycznych
układ SI
długość: metr
m
masa: kilogram
kg
czas: sekunda
s
natężenie prądu: amper
A
temperatura: kelwin
K
ilość materii: mol
mol
światłość: kandela
cd
kąt płaski: radian
rd
kąt bryłowy: steradian
sr
Jednostki pochodne w mechanice:
długość (droga)
m
prędkość =
czas
s
praca = siła długość (droga)
N m
=
praca
N m
moc
czas
s
= W
01 Wprowadzenie
5
SKALARY
Liczby mianowane
WEKTORY
wartość liczbowa (moduł)
kierunek w przestrzeni
zwrot na kierunku działania
punkt przyłożenia.
P
Kierunek działania
Zwrot
Wartość liczbowa (moduł)
Punkt przyłożenia
Wektor siły skupionej
RACHUNEK WEKTOROWY
PODSTAWOWE POJĘCIA MECHANIKI
SIŁA – wynik wzajemnego mechanicznego
oddzia
ływania na siebie ciał.
Siły zewnętrzne czynne i bierne (reakcje), wewnętrzne
Siły skupione, rozłożone liniowo, powierzchniowo, obję-
tościowo
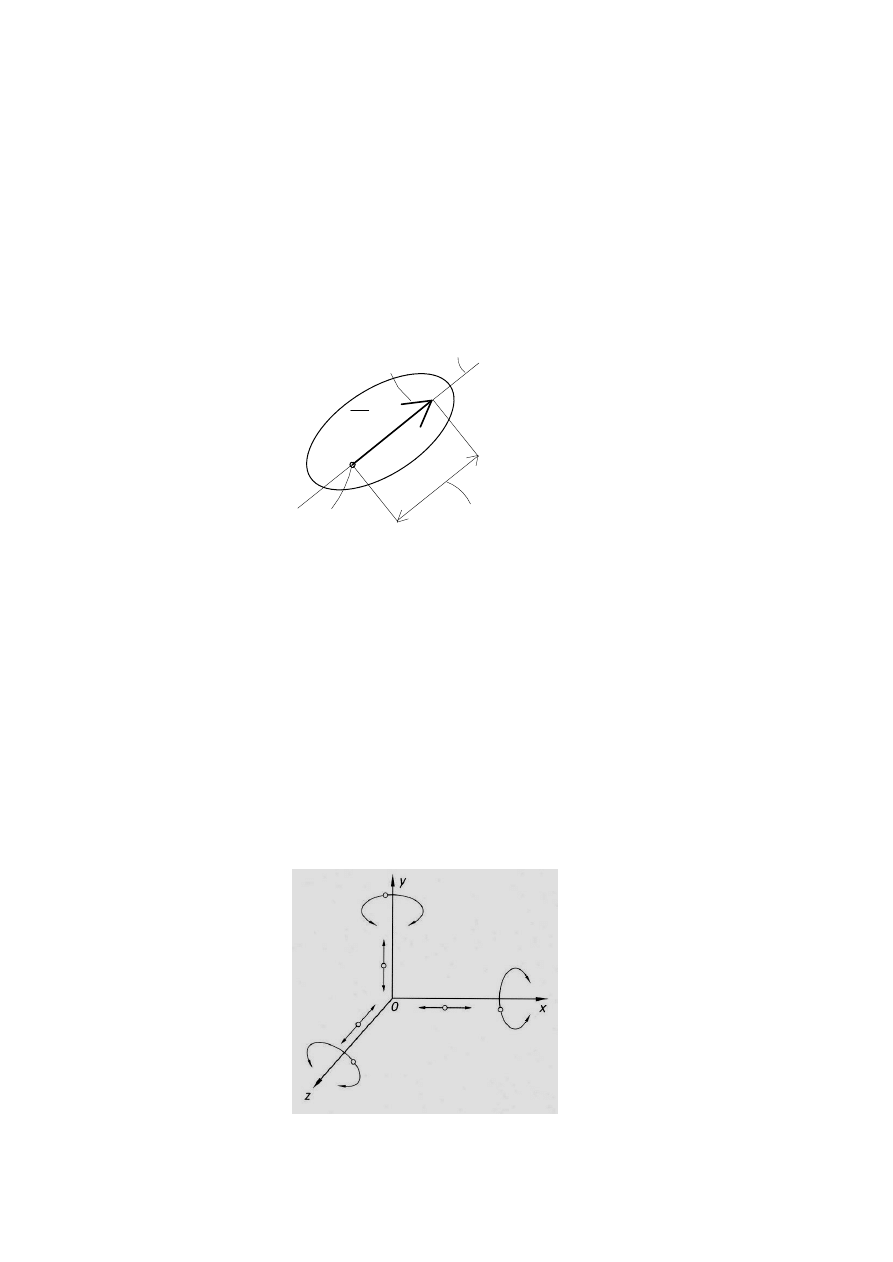
CIAŁA SWOBODNE
Stopnie swobody
01 Wprowadzenie
6
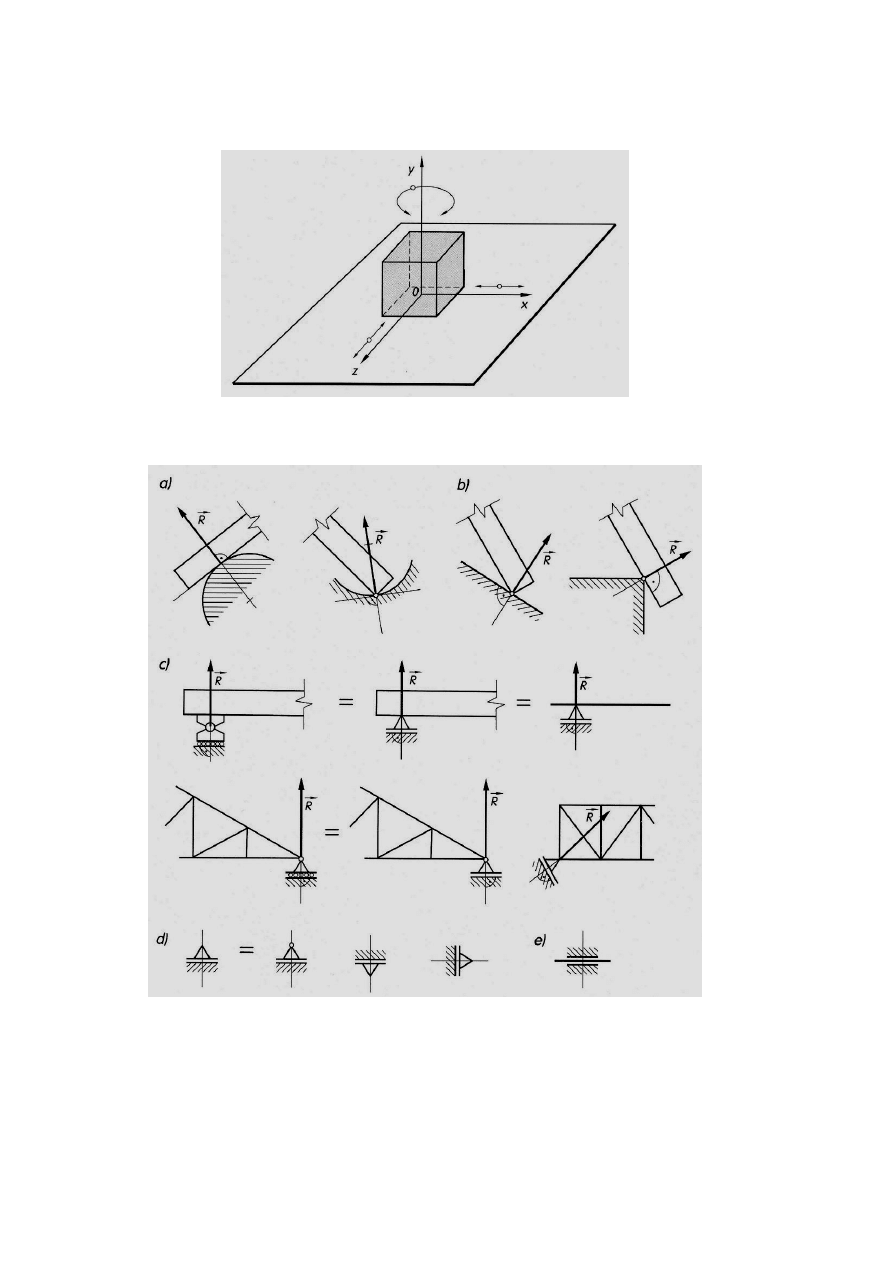
CIAŁA NIESWOBODNE
Więzy (ograniczenia) ograniczające ruch
Przykłady podpór ruchomych
01 Wprowadzenie
7
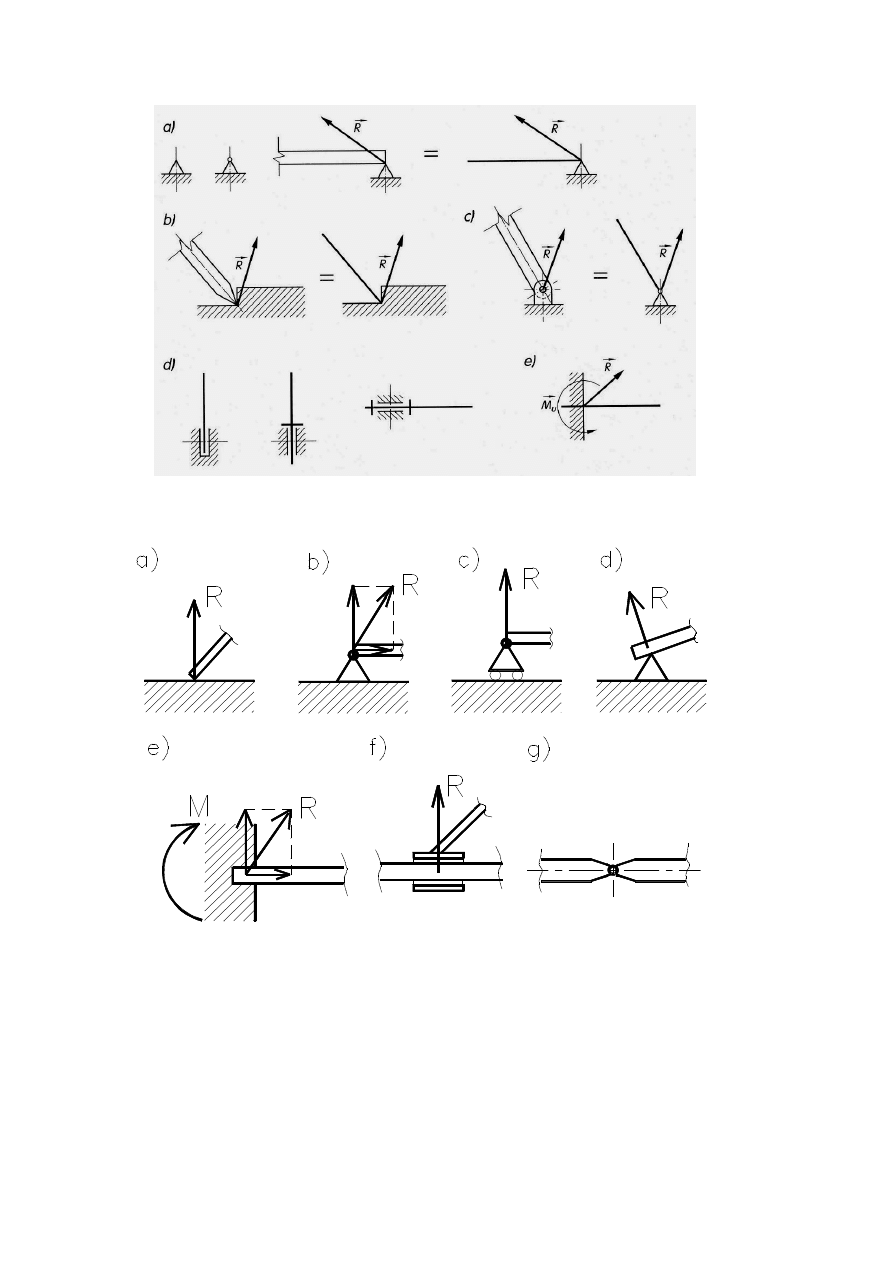
Przykłady podpór nieruchomych
Przykłady podparcia konstrukcji oraz reakcje podporowe:
a) pręt spoczywający na podłożu, b) podparcie przegubo-
we nieprzesuwne, c) podparcie przegubowe przesuwne, d)
ostrze, e) utwierdzenie, f) tuleja przesuwna, g) przegub po-
średni
01 Wprowadzenie
8
Podstawą mechaniki są trzy prawa Newtona, sformuło-
wane w 1687 r., mające fundamentalne znaczenie w
mechanice i wytrzymałości materiałów.
I prawo Newtona
(prawo bez-
władności)
Punkt materialny, na który nie działa
żadna siła, pozostaje w spoczynku lub
porusza się ruchem jednostajnym po
linii prostej.
W
łaściwość ciał materialnych, polegająca na zachowy-
waniu swego stanu – ruchu jednostajnego prostoliniowego,
a w szczególności stanu spoczynku, nazywa się bezwład-
nością.
II prawo Newtona
(prawo zmienno-
ści ruchu)
Przyspieszenie punktu materialnego
jest pro
porcjonalne do siły działającej
na ten punkt i ma kie
runek siły.
Matematycznie II prawo Newtona zapisuje się w postaci
wektorowej:
P
=
a
m
,
gdzie m jest współczynnikiem proporcjonalności zwanym
masą. Masa jest miarą bezwładności, czyli właściwości
materii polegającej na tendencji do zachowywania stanu ru-
chu lub spoczynku. Masa jest wielkością skalarną charakte-
ryzującą ciało.
III prawo Newtona
(prawo akcji i re-
akcji)
Siły wzajemnego oddziaływania
dwóch punktów materialnych są rów-
ne co do warto
ści i są przeciwnie
skierowane wzdłuż prostej łączącej
oba punkty.
01 Wprowadzenie
9
ZAKRES ZASTOSOWANIA MECHANIKI NEWTONA
(NIUTONOWSKIEJ)
Mechanika oparta o prawa Newtona w zupełności wystar-
cza do opisu wszystkich zjawisk mechanicznych, w których
występują prędkości znacznie niższe od prędkości światła
–
dotyczy to inżynierskich zastosowań mechaniki w budo-
wie maszyn i budownictwie.
JEDNOSTKI MASY I SIŁY
2
2
s
m
kg
1
s
m
1
kg
1
N
1
niuton
1
1 kN = 10
3
N,
1 MN = 10
3
kN = 10
6
N
ZWIĄZEK MIĘDZY MASĄ A CIĘŻAREM
Siła ciężkości – siła z jaką Ziemia przyciąga
a dane ciało materialne
Ciężar ciała = masa przyspieszenie ziemskie
G = m g
g = 9,81 m/s
2
m g = 1kg 9,81 m/s
2
= 9,81 kgm/s
2
= 9,81 N
Ciężar ciała o masie 1 kg wynosi 9,81 N.
Ciało 1: ciężar G
1
, masa m
1
Ciało 2: ciężar G
2
, masa m
2
G
1
= m
1
g,
G
2
= m
2
g,
2
1
2
1
m
m
G
G
Stosunek dwóch ciężarów jest równy stosunkowi ich mas.
Jest to podstawa pomiaru masy ciała za pomocą ważenia
(porównania ze wzorcem).
Wyszukiwarka
Podobne podstrony:
maszyny proste, Technik BHP, CKU Technik BHP, CKU, Notatki szkoła CKU (BHP), Podstawy mechaniki, Mec
Mechanika techniczna podstawy
Podstawy mechaniki, konstrukcji, budowy maszyn i rysunku technicznego
Podstawy mechaniki, konstrukcji,budowy maszyn i rysunku techniczenego
Podstawy mechaniki i rysunku technicznego Lacki h
maszyny proste, Technik BHP, CKU Technik BHP, CKU, Notatki szkoła CKU (BHP), Podstawy mechaniki, Mec
Mechanika techniczna podstawy
Mechanika techniczna(12)
Mechanika techniczna(1)
Mechanika Techniczna I Skrypt 2 4 Kinematyka
Mechanika Techniczna I Skrypt 4 2 4 Układ belkowy złożony
Przewłócki J Podstawy mechaniki budowli
Tarcie, Materiały, Inżynieria Środowiska, Semestr 2, Mechanika techniczna, egzaminy
Maszyny-koło projekt, Technologia chemiczna, Maszynoznawstwo i mechanika techniczna, ogólne materiał
więcej podobnych podstron