Sterowniki PLC/PAC
Uwagi wstęne
-Sterowniki PLC/PAC są jednymi z najczęściej stosowanych w
przemyśle cyfrwych urządzeń sterujących
-Skróty nazw oznaczają Programmable Logic Controller i
Programmable Automation Controller
-Pod względem konstrukcyjnym obie wersje nie różnią się między
sobą nazwa PAC jest raczej chwytem marketingowym i oznacza PLC
o większych możliwościach obliczeniowych i platformą programową
o większej otwartości.
-Sterowniki PLC pierwotnie były dedykowane wyłącznie do realizacji
sterowania logicznego , obecnie (zwłaszcza wersje PAC) są w stanie
realizować większość zadań sterowania za wyjątkiem sterowania
numerycznego i robotyki.
-Kostrukcja i zasady programowania sterowników PLC są
znormalizowane.
Generalne założenia dotyczące systemów PLC:
-Łatwe programowanie i rekonfiguracja(sprzętowa i programowa) w
zależności od potrzeb.
-Konstrukcja modułowa i łatwość napraw i utrzymania w ruchu
poprzez wymianę modułów
-Wyższa niezawodność mniejsze wymiary i pobór energii niż systemy
przekaźnikowe
-Cena porównywalna ze sprzętem przekaźnikowym
Uwagi
-Konfiguracja jest budowana z modułów ściśle pod kątem wymagań
określonej aplikacji
-W ramach jednej "rodziny" sterowników jest dostępna duża liczba
różnych modułów o różnych możliwościach i cenie
-Lokalizacja modułów na szynie jest ściśle okreslona i determinuje
np. Ich adresy
-W praktyce często stosowana jest konfiguracja rozproszona, gdy
moduły sygnałowe są połaczone z CPU za pośrednictwem sieci.
Podstawowe typy modułów sterownika PLC:
-Zasilacze
-jednostki centralne (CPU)
-moduły komunikacyjne np ETHERNET
-moduły sygnałów procesowych:(wejścia binarne, analogowe, wyjścia
binarne, analogowe)
-Specjalizowane moduły "inteligentne" z własnymi procesami i
układami wejść i wyjśc np.:pozyjonowanie osi ,regulacja temperatury
Dodatkowe elementów PLC:
Panele operatorskie – są to autonomiczne elementy o różnej
funkcjonalności od prostej aż do bardzo rozbudowanej. Te bardziej
rozbudowane pracują np pod windowsami ce i mogą być platformą
sprzętową dla aplikacji SCADA i stopnia nadrzędnego.
Sieć przemysłowa:
-Do połączenia rozproszonej konfiguracji pojedynczego PLC
-do połączenia sterownika PLC z innymi elementami systemu(np
komputer)
-sieć przemysłowa może siędość znacznie różnic od ETHERNETU
Kompaktowy sterownik "hard PLC". Cechy:
-W jednej obudowie jest CPU zasilacz i zespół wejści wyjśc
-rozwiązanie dedykowane do prostszych aplikacji i tańsze niż
sterownik modułowy
-większość sterowników kompaktowych ma możliwość rozbudowy o
dodatkowe wejścia i wyjścia.
System sterowania "soft PLC"
Idea:Interfejs procesowy oraz metody programowania są te same co
dla systemu hard plc.; Jednostka centralna jest zrealizowana
wirtualnie pod nadzorem systemu WINDOWS
Zalety:Znacznie większa moc obliczeniowa w stosunku do systemu
hard PLC; intergracja na jednej platformie sprzętowo-programowej
systemu SCADA i CPU sterownika(i ew. Środowiska
konfiguracyjnego)
Wady:Praca pod nadzorem systemu WINDOWS (zawodność
działania)
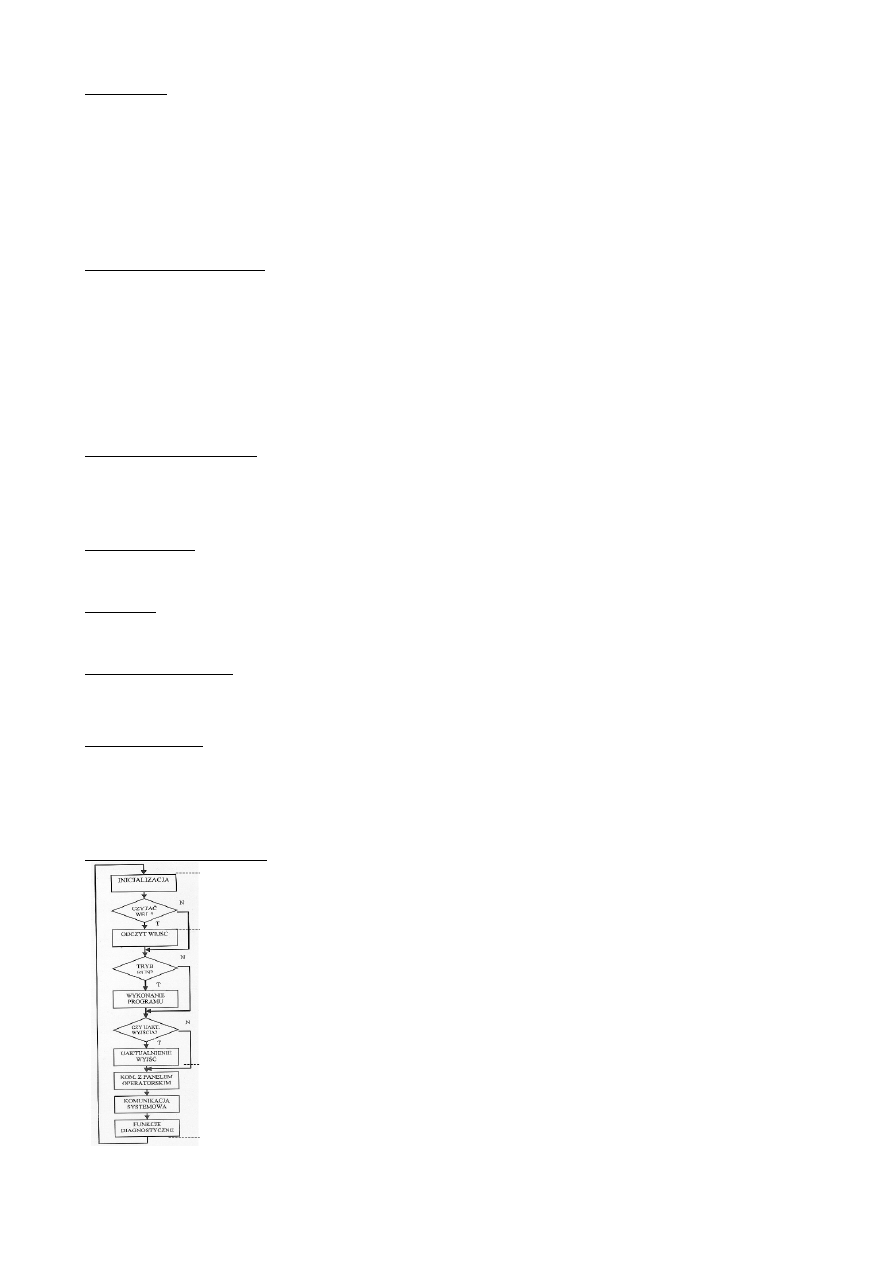
Cykl programowy PLC i regulatora cyfrowego:
od „odczyt wejść” do „uaktualnienie wejść”: czas odpowiedzi T
0
od początku do końca: czas cyklu Ts
Czas cyklu ( ang. Cycle Time, Scan Time) Ts Jest to czas trwania 1
cyklu programowego, od inicjalizacji do diagnostyki.
Czas odpowiedzi ( ang. Response Time) To Jest to czas od odczytu
wejścia do zapisu skojarzonego z tym wejściem wyjścia.
Podczas pracy sterownika wartości Ts oraz To nie są stałe, lecz
zmieniają się w pewnym zakresie i można jedynie oszacować ich
minimalne i maksymalne wartości:
Dokładność zależy od oszacowań producenta
W przypadku regulatorów PID i innych prostych urządzeń nie mamy
wpływu na wartość Ts oraz To, natomiast mamy wpływ na te
parametry i mogą one być szacowane oraz mierzone w przypadku
systemów PLC.
Przykład szacowania wartości To dla sterownika PLC (SIEMENS):
T
omin
=T
R
+Tos+Tu+Tw+T
Di
+T
Do+
T
T
T
omax
=2T
R
+2Tos+2Tu+2Tw+T
Di
+T
Do+
T
T
+2T
DP
TR – czas odczytu wejść,Tos -czas wykonania systemu
operacyjnego,Tu – czas wykonania programu użytkownika,TW – czas
zapisu wyjść,TDi –czas opóźnienia wejść,TDo –czas opóźnienia
wyjść,
Oszacowanie czasu obsługi wejść i wyjść:
T
R
+T
W
=K+A*LB
0
+B*LB
1%3
+D*LB
DP
LB – liczba bajtów czytanych lub zapisywanych:
0 – na szynie 0,
1-3 – na szynach 1 – 3,
DP- w układach rozproszonych wejść /wyjść
K, A, B, D - stałe, równe w przypadku CPU 315 SIEMENS SIMATIC
S7 300: K = 109 [us] , A= 10.6 [us] , B = 12.6 [us] , D = 10 [us] .
Oszacowanie czasu wykonania programu użytkownika:
F = 1.15 ( dla CPU 315 )
Tinstr – czasy wykonania wszystkich instrukcji programu
Czas wykonania pojedynczej instrukcji programu jest
zdeterminowany przez: Typ CPU;Typ instrukcji;typ danych na jakich
ta insrukcja jest wykonana
Czasy wykonania timerów:
T
T
=8n; n = ilość timerów użytych w programie
WNIOSKI ( tylko system „Hard-PLC”):
-Operacje wykonywane na danych typu DINT są znacznie szybsze,
niż na danych typu REAL, przy tej samej precyzji.
-W przypadku wysokich wymagań dot czasu cyklu należy pamiętać o
wyłączaniu nie używanych wejść i wyjść,
-Sterownik „hard PLC” nie nadaje się do realizacji zadań sterowania
numerycznego i robotyki, gdyż te zadania wymagają wykonywania
dużej ilości szybkich obliczeń z użyciem funkcji trygonometrycznych.
-Oszacowania podawane przez producenta sprzętu są zwykle bardzo
„ostrożne” i opisują najgorsze możliwe przypadki.
Zasady programowania sterowników PLC
Ogólne zasady programowania opisane w normie:
-Model i elementy oprogramowania
-typy danych
-typy zmiennych
-języki i metody programowania
Zasady nieomówione (zleżne od systemu sprzętu)
-zasady adresacji
-"nieformalne" elementy oprogramowania
-metody implementacji niektórych elementów
Konfiguracja – element na najwyższym poziomie jest to całość
oprogramowania sterownika determinująca jego pracę. Obejmuje
zarówno OS jak i program użytkownia
Zasób – Element opisujący platformę sprzętową do realizacji
programu. Program aby był wykonywalny musi być załadowany do
zasobu np symulator PLC jest symulatorem zasobu.
Program – Jest to logiczne połączenie wszystkich elementów
konstrukcji potrzebnych do założonego przetworzenia sygnałów
wymaganego do sterowania maszyny lub procesu przez system PLC
Zadanie – Element nadzorujący wykonanie programu lub pewnej
jego logicznej całości
Blok funkcyjny - element dynamiczny o wielu wejściach i wyjściach
-bloki funkcyjne są podstawowym narzędziem programowania
obiektowego systemów PLC
-wyjścia bloku są zdeterminowane zarówno przez wejścia jak i przez
historię działania bloku (część zmiennych jest zapamiętywana z
poprzednich wywołań)
-"na zewnątrz" bloku są dostępne wyłącznie zmienne wejśiowe i
wyjśiowe a nie są dostępne zmienne wewnętrzne
Standardowe bloki funkcyjne są częścią firmware’u sterownika i są
dostępne w każdym systemie PLC:-elementy bistabilne,-elementy
detekcji zbocza,-liczniki,-timery.
Niektóre (nie wszystkie systemy PLC umożliwiają budowę własnych
FB podczas budowy oprogramowania.
Funkcja Element statyczny o wielu wejściach i zwracający jedną
wartość określonego typu.
-Funkcyjne są również podstawowym narzędziem programowania
obiektowego systemów PLC
-Wartość wyjścia funkcji jest zdeterminowana wyłącznie przez
wartość jej wejść (funkcja nie posiada „pamięci”).
-„na zewnątrz” funkcji są dostępne wyłącznie zmienne wejściowe i jej
wyjście, a nie są dostępne zmienne wewnętrzne

W każdym systemie PLC dostępny jest dość duży zestaw funkcji
standardowych
-funkcje konwersji typu,
-funkcje arytmetyczne i matematyczne,
-funkcje porównania,
-funkcje wyboru,
-funkcje operujące na danych typu STRING,
-funkcje operujące na danych typu czasowego,
Niektóre (nie wszystkie) systemy PLC umożliwiają budowę własnych
funkcji podczas budowy oprogramowania.
Zmienna globalna -Zmienna dostępna dla wszystkich elementów
programu, zasobu lub konfiguracji.
-Zmienne globalne umożliwiają szybką wymianę danych w obrębie
programu,
-Zaburzona jest sekwencyjność wykonania programu,
-„Dobre narzędzie do budowy zupełnie niezrozumiałych programów”,
-Szczegóły definiowania i stosowania zależne są od konkretnego
systemu.
Zmienna bezpośrednio reprezentowana -Zmienna, której nazwą jest
adres(wejścia, wyjścia lub komórki pamięci wewnętrznej).
Zasady adresacji są zależne od systemu i pomimo ogólnych
podobieństw różnią się pomiędzy sobą.
Przykładowo: adresy wejścia binarnego w 3 systemach:
SIEMENS: 10.0, GEFANUC: %l1, ALLEN_BRADLEY: l1:0.0/0
Ścieżka dostępu –Element oprogramowania zapaeniający wymianę
danych z innymi konfiguracjami lub konfiguracją a innym
elementem(np. systemem SCADA)
Wyszukiwarka
Podobne podstrony:
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
Probiotyki antybiotyki id 66316 Nieznany
miedziowanie cz 2 id 113259 Nieznany
LTC1729 id 273494 Nieznany
D11B7AOver0400 id 130434 Nieznany
analiza ryzyka bio id 61320 Nieznany
pedagogika ogolna id 353595 Nieznany
Misc3 id 302777 Nieznany
cw med 5 id 122239 Nieznany
D20031152Lj id 130579 Nieznany
mechanika 3 id 290735 Nieznany
więcej podobnych podstron