
Amper [A]
Definicja 1 A - prąd o natężeniu 1 A, jest to stały prąd
elektryczny, który płynąc w dwóch równoległych,
prostoliniowych, nieskończenie długich przewodach o
znikomo małym przekroju kołowym, umieszczonych w
próżni w odległości 1 m od siebie, spowodowałby
wzajemne oddziaływanie przewodów na siebie z siłą
równą
2 x 10
-7
[N]
na każdy metr długości przewodu.
Do definicyjnego wyznaczenia jednostki służy waga prądowa. Dokładnością ustępuje
jednak kalibratorom prądu i w praktyce jest przez nie wyparta.
Jeśli przepływający przez dany przekrój prąd ma
natężenie 1 A, oznacza to, że w ciągu 1 s przepływa 1 C
ładunku,
kelwin [K]
kelwin - jednostka temperatury w
układzie SI równa 1/273,16
temperatury termodynamicznej
punktu potrójnego wody, oznaczana
[K]

kandela (świeca)
jednostka światłości źródła światła; jednostka
podstawowa w układzie SI, oznaczana [cd].
Jest to światłość, z jaką świeci w określonym
kierunku źródło emitujące promieniowanie
monochromatyczne o częstotliwości 5,4·1014
Hz, i wydajności energetycznej w tym
kierunku równej (1/683) [W/srd].
Kandela to również światłość 1/600000 m²
ciała doskonale czarnego w temperaturze
krzepnięcia platyny pod ciśnieniem 1
atmosfery fizycznej.

mol [mol]
Mol – podstawowa w układzie SI jednostka liczności materii,
oznaczana [mol].
Jeden mol jest to liczba indywiduów chemicznych (np. atomów,
cząsteczek, jonów, elektronów itp.) równa liczbie atomów zawartych
w 12 gramach izotopu węgla C12 (przy założeniu, że węgiel jest w
stanie niezwiązanym chemicznie, w spoczynku, a jego atomy nie
znajdują się w stanie wzbudzenia). W jednym molu znajduje się
6,02214179±0,00000030 · 10
23
cząstek.
Liczba ta jest nazywana stałą Avogadra[2]. Mol jest szczególnie
istotny dla pojęcia masy molowej, która ma duże znaczenie
praktyczne dla ilościowego doboru składników reakcji chemicznych.

lumen [lm]
- jednostka miary strumienia
świetlnego w układzie SI (jednostka
pochodna układu SI)
1 lm = 1 [cd·sr]
Jest to strumień świetlny wysłany w
jednostkowy kąt bryłowy (steradian)
przez izotropowe punktowe źródło
światła o światłości jednej kandeli
umieszczone w wierzchołku tego kąta
Luks [lx]
- jednostka natężenia oświetlenia E w
układzie SI (Jednostka pochodna układu
SI)
1 lx = 1 cd·sr / m
2
Luks określany jest jako oświetlenie wywołane przez
równomiernie rozłożony strumień świetlny o wartości
równej 1 lumen (lm) padający na powierzchnię 1m
2
, a
więc:
1 lx = 1 lm / m
2
.

Po latach szczególna teoria
względności Einsteina oprze
się na dwóch postulatach
- ruch bezwzględny nie może być
wykryty ;
- szybkość światła jest niezależna od
ruchu źródła
czego Galileusz i Newton nie
wiedzieli.
Często w ramach postulatów szczególnej teorii względności
mówimy także o zasadzie kosmologicznej która mówi, że nie
ma wyróżnionego punktu w przestrzeni co jest innym
sformułowaniem zasady (1)
Oddziaływania
fundamentalne
są odpowiedzialne za siły działające pomiędzy
cząstkami.
Elektromagnetyczne
Słabe
Silne jądrowe
Silne kolorowe
Elektryczne
magnetyczne
Podstawowe oddziaływania:
1. Grawitacyjne
2. Elektrosłabe
3
.
Silne
Dla opisu zjawisk fizycznych byłoby najlepiej,
gdyby istniało tylko jedno oddziaływanie,
zawierające w sobie wszystkie do tej pory
wymienione.
Jesteśmy blisko Teorii Wszystkiego - unifikacji
oddziaływań słabych, elektromagnetycznych i
silnych.
KINEMATYKA -dział mechaniki, który podaje opis
przestrzenno-czasowych właściwości ruchu
DYNAMIKA - badanie ruchu z uwzględnieniem jego
przyczyn, zajmuje się
zobacz: R. Kulessa UJ Wykłady z Fizyki
http://users.uj.edu.pl/~kulessa
Układy
odniesienia
Jakieś zdarzenie fizyczne w określonym miejscu
definiujemy przez podanie dokładnej
informacji o miejscu i czasie, w którym to
nastąpiło podając jednocześnie układ
odniesienia.
Z
A
B
1
r
2
r
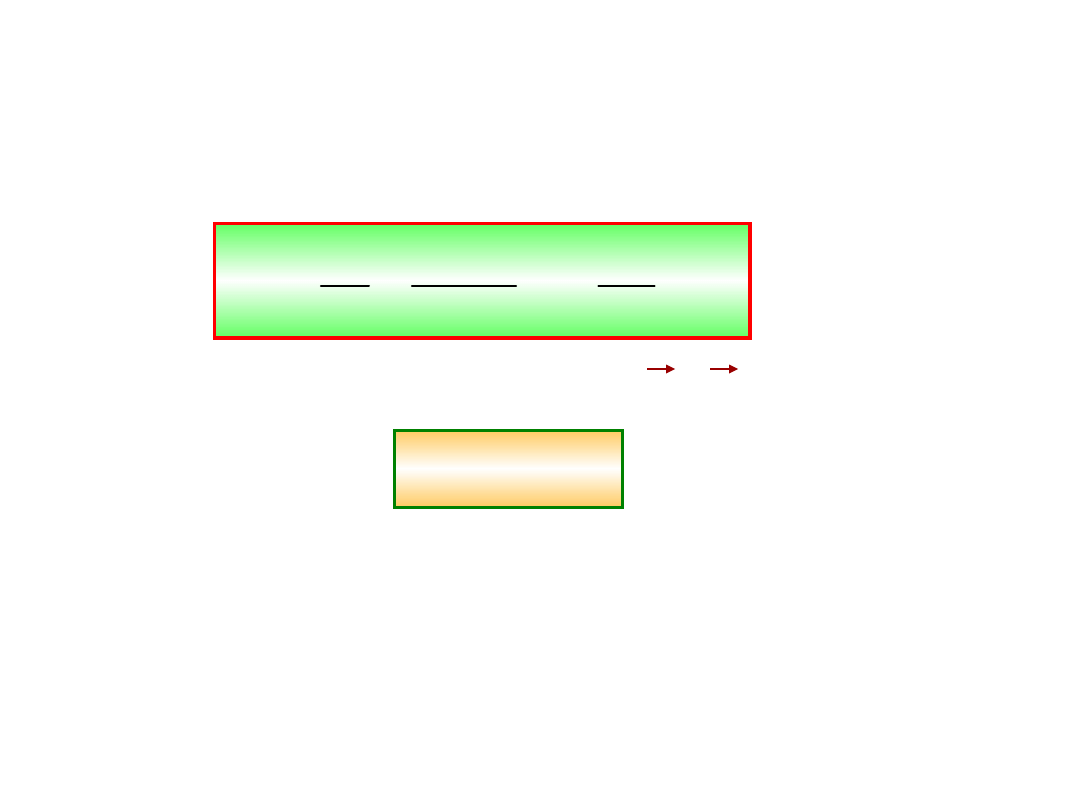
Aby opisać dwa zdarzenia obserwator musi
zarejestrować miejsce i czas każdego z nich w
danym układzie.
i
f
r
i
t
i
r
f
t
f
Jeśli obserwator
zarejestruje
miejsce zdarzeń i i f,
oraz ich czasy t
i
i t
f
, to
równania
i
f
i
f
t
t
t
r
r
r
określają wektor przesunięcia dla tych
zdarzeń, oraz przedział czasowy pomiędzy
nimi.
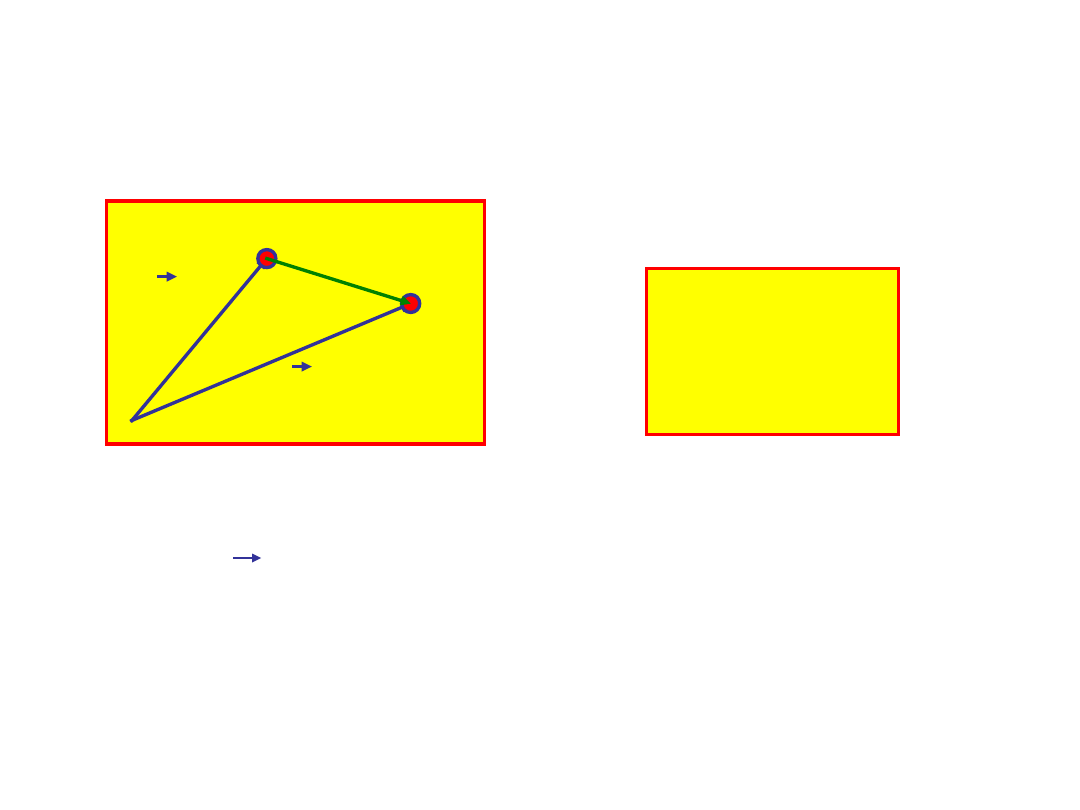
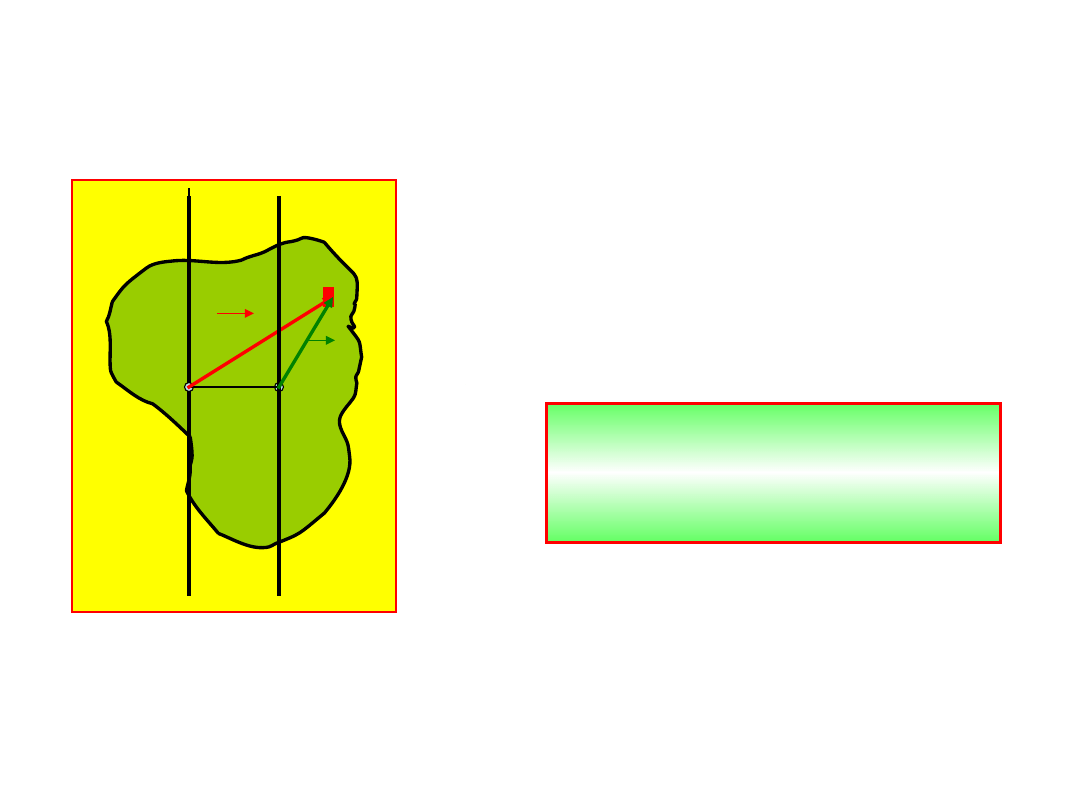
Wektor r określa odległość między
zdarzeniami i i f, oraz kierunek od i do f.
Okazuje się, że wektor przesunięcia może
być taki sam dla kilku różnych
obserwatorów umiejscowionych w
różnych miejscach
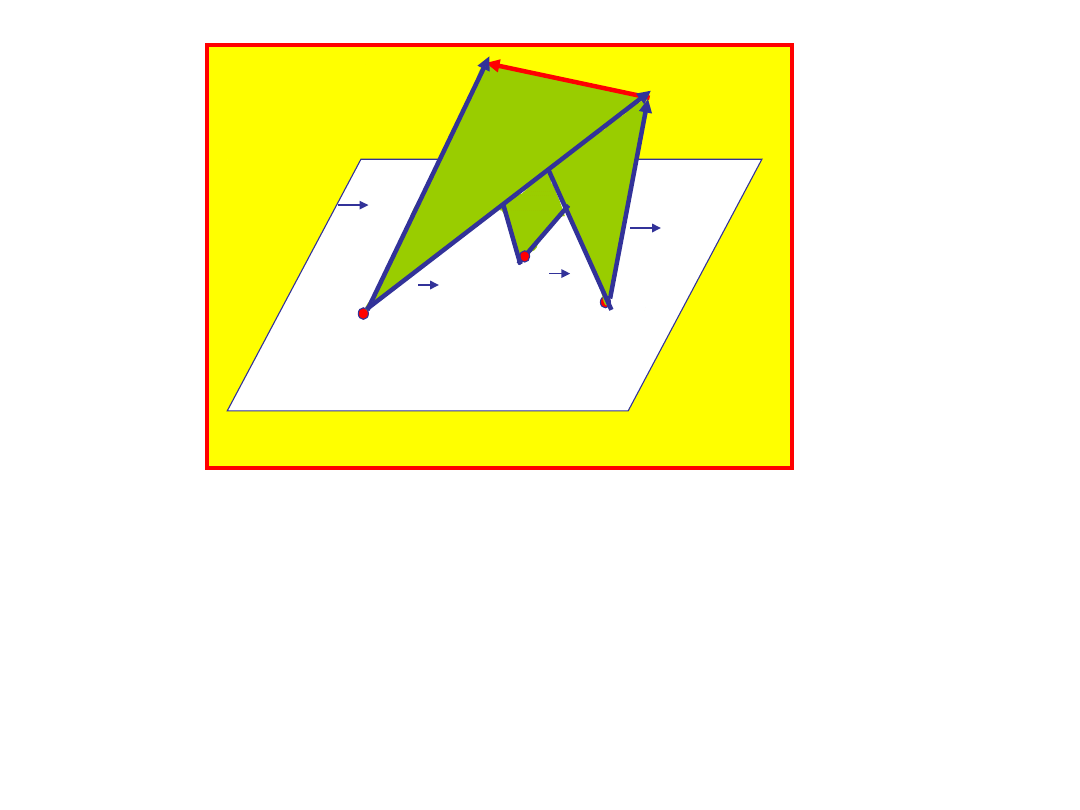
Jeśli mamy trzech obserwatorów, których
względna pozycja się nie zmienia, każdy z nich
określi zdarzenie
i
i
f
przez inne wektory to
przesunięcie
od punktu i do f będzie dla
wszystkich obserwatorów takie same.
Również
czas jaki upłynie od zdarzenia i do f
będzie dla
wszystkich obserwatorów taki sam
.
A
B
C
r
iA
r
fA
r
iB
r
fB
i
f
Układ odniesienia nazywamy inercjalnym,
jeżeli porusza się on ruchem jednostajnym po
linii prostej albo pozostaje w spoczynku
względem innego układu inercyjnego.
Układ taki jest de facto definiowany przez
podanie transformacji Galileusza a także w I
Zasadzie dynamiki Newtona. Takie
definiowanie jest zaledwie wewnętrznie spójne
i fizycy długo poszukiwali absolutnego układu
odniesienia aby w końcu stwierdzić, że go nie
ma! : )
Ruch punktu (i nie tylko) może być opisany w
różnych układach
współrzędnych, np. Kartezjańskim, walcowym,
biegunowym, sferycznym.
Obserwator jest (zwykle) umieszczony w początku
układu współrzędnych.
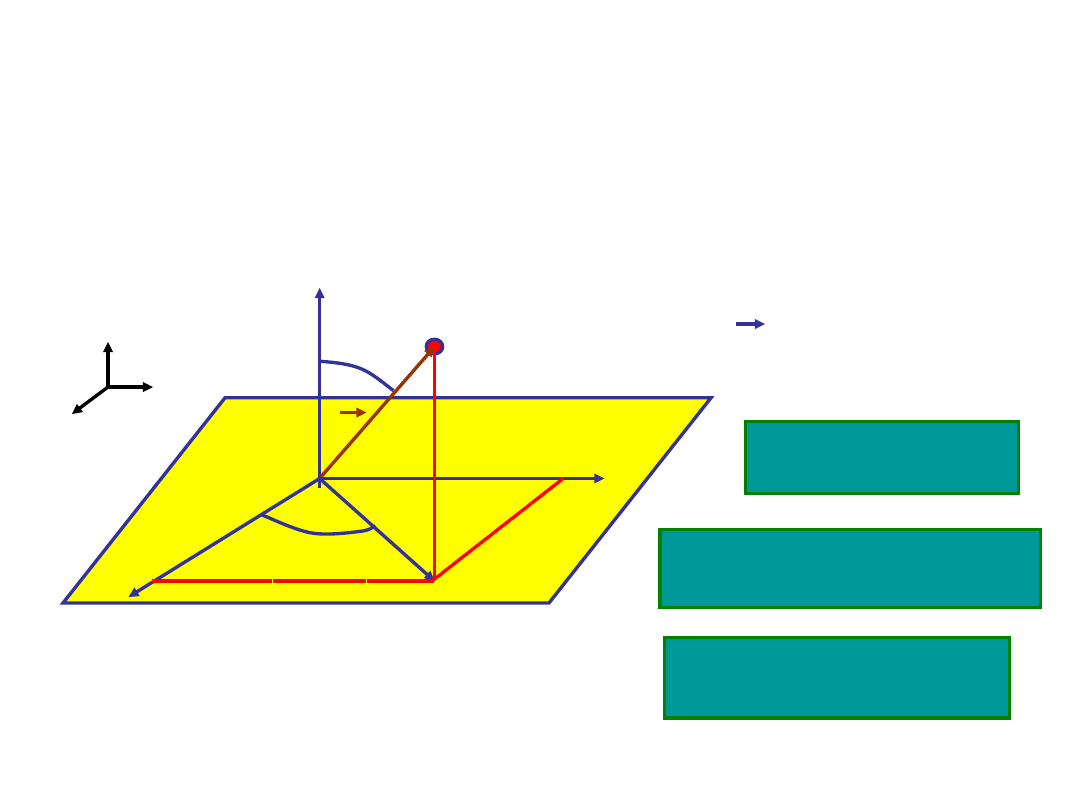
Układy współrzędnych
Jeżeli chcemy podać położenie punktu to
możemy to uczynić definiując tzw.
wektor
położenia
(wektor wodzący)
, w różnych
układach współrzędnych
z
x
y
r
P
y
x
z
Promień
wodzący
r możemy
podać w
różny sposób:
z
y
x
r
k
z
z
j
y
y
i
x
x
ˆ
,ˆ
,ˆ
k
z
j
y
i
x
r
ˆ
ˆ
ˆ
k
j
i
ˆ
,
ˆ
,
ˆ
oznaczają
wektory jednostkowe
poszczególnych osi.
ˆk
ˆi
ˆj
Współrz
ę
dne biegunowe
Jeżeli położenie punktu zmienia się w czasie to w
układzie współrzędnych prostokątnych możemy to opisać
w następujący sposób
)
)
(
ˆ
)
(
ˆ
)
(
ˆ
)
(
t
z
k
t
y
j
t
x
i
t
r
ˆk
ˆi
ˆj
Zakładamy, że układ jest prawoskrętny
ale może nie być : )
tor ruchu
x
y
r(t)
P(x(t),y(t),z(t))

Wersory możemy również zapisywać na różne
sposoby. W trakcie tego wykładu używać
będziemy wersji drugiej, czyli i z daszkiem.
x, y i z są współrzędnymi kartezjańskimi.
Współrzędne punktu P możemy również
zapisać we współrzędnych sferycznych.
k
k
i
z
j
j
i
y
i
i
i
x
z
y
x
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
0
0
0
cos
sin
sin
cos
sin
r
z
r
y
r
x
W zależności od tego, czy tor jest linią krzywą
czy prostą, mówimy o
ruchu krzywoliniowym
lub
prostoliniowym.
P(x(t),y(t),z(t))
z
tor
x
y
r(t)
.
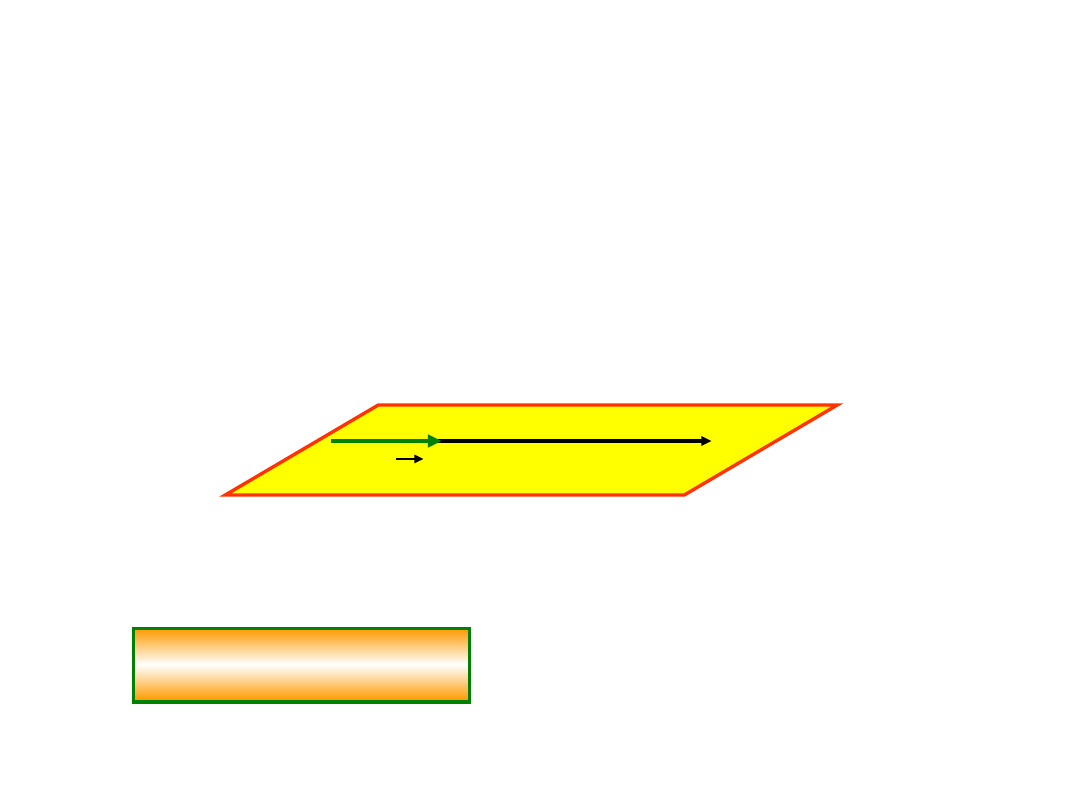
Przykładem ruchu dla którego celowe jest
określenie prędkości średniej jest ruch
samochodu w mieście. Nie zawsze „zielona
fala” umożliwia ruch samochodu ze stałą
prędkością.
Powyższa animacja pokazuje taką sytuację.
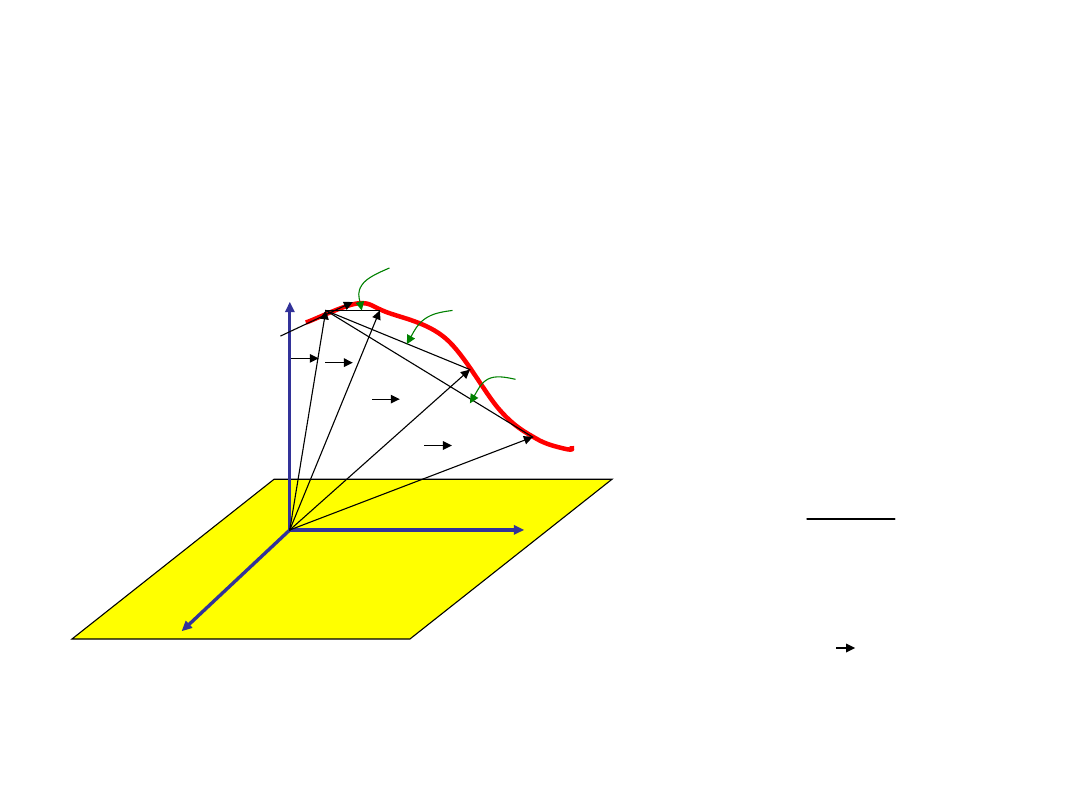
Prędkość i przyśpieszenie
jako pochodna
wektora położenia
Interesuje nas prędkość jakiegoś ciała w
konkretnym punkcie P. W jaki sposób możemy ją
obliczyć?
r
1
r
2
r
3
P
1
P
2
P
3
P
x
y
z
r
r
1
r
3
r
2
t
1
Zacznijmy skracać odstępy
czasu w których określamy
położenie ciała.
Każdorazowo konstruujemy
wektor prędkości średniej
Gdy skracamy
nieograniczenie
odstęp czasu t 0, wartość bezwzględna wektora
r / t dąży do
pewnej wartości granicznej.
n
n
n
t
r
v
Wektor, do którego dąży wektor prędkości
średniej gdy
t
n
0 nazywamy prędkością v ciała w punkcie
P.
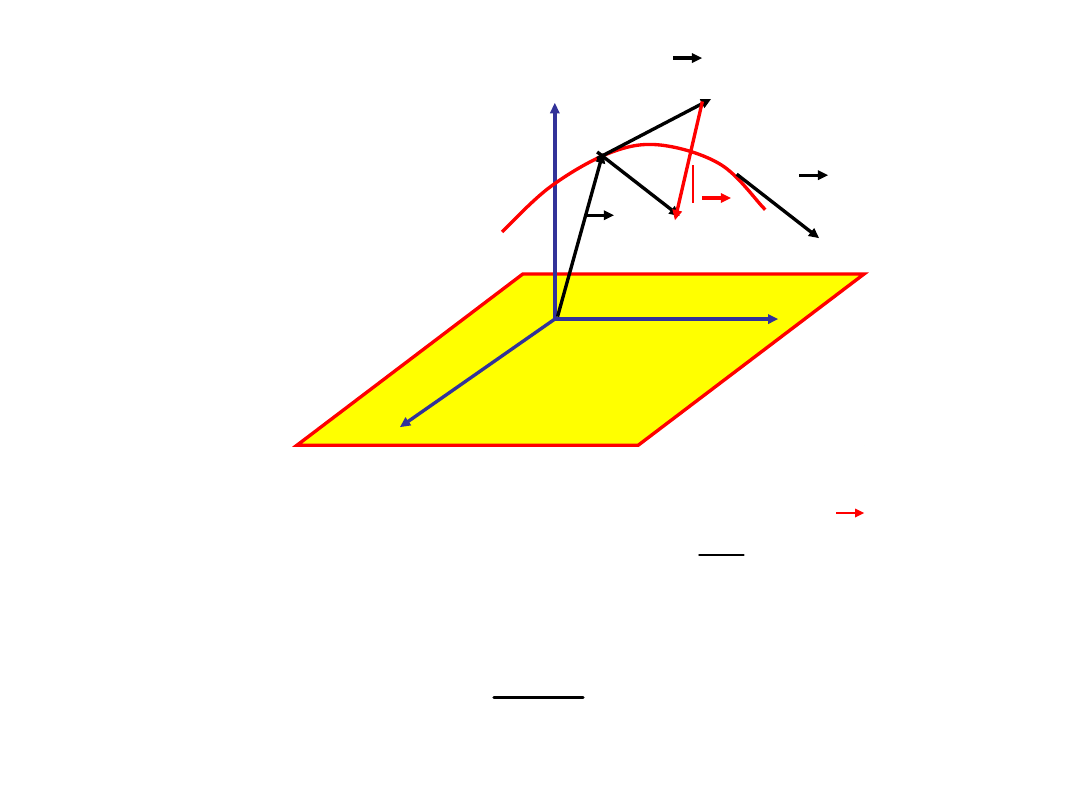
Ponieważ wektor r ma trzy składowe możemy
napisać
Wektor prędkości został rozłożony na trzy
składowe:
Kierunek tego wektora dąży do kierunku stycznej do toru w punkcie P.
i
dt
t
dz
i
dt
t
dy
i
dt
t
dx
dt
r
d
y
x
ˆ
)
(
ˆ
)
(
ˆ
)
(
v
z
z
y
y
x
x
i
i
i
ˆ
v
ˆ
v
ˆ
v
v
dt
r
d
t
r
t
0
lim
v
z
v
1
x
y
tor
P
1
P
2
v
2
v
r
1
Z rysunku widzimy, że w stosunku do
punktu P
1
w punkcie P
2
nastąpiła zmiana
prędkości
w czasie t.
Średnie
przyśpieszenie definiujemy jako
:
v
t
a
śr
v
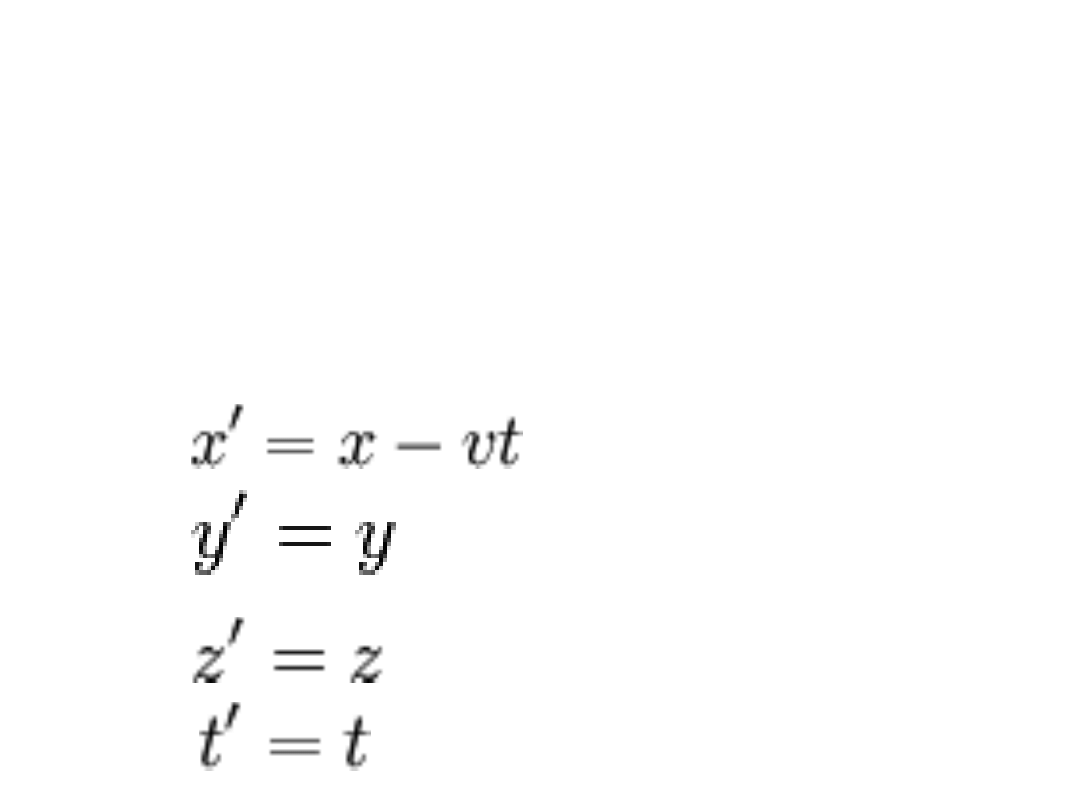
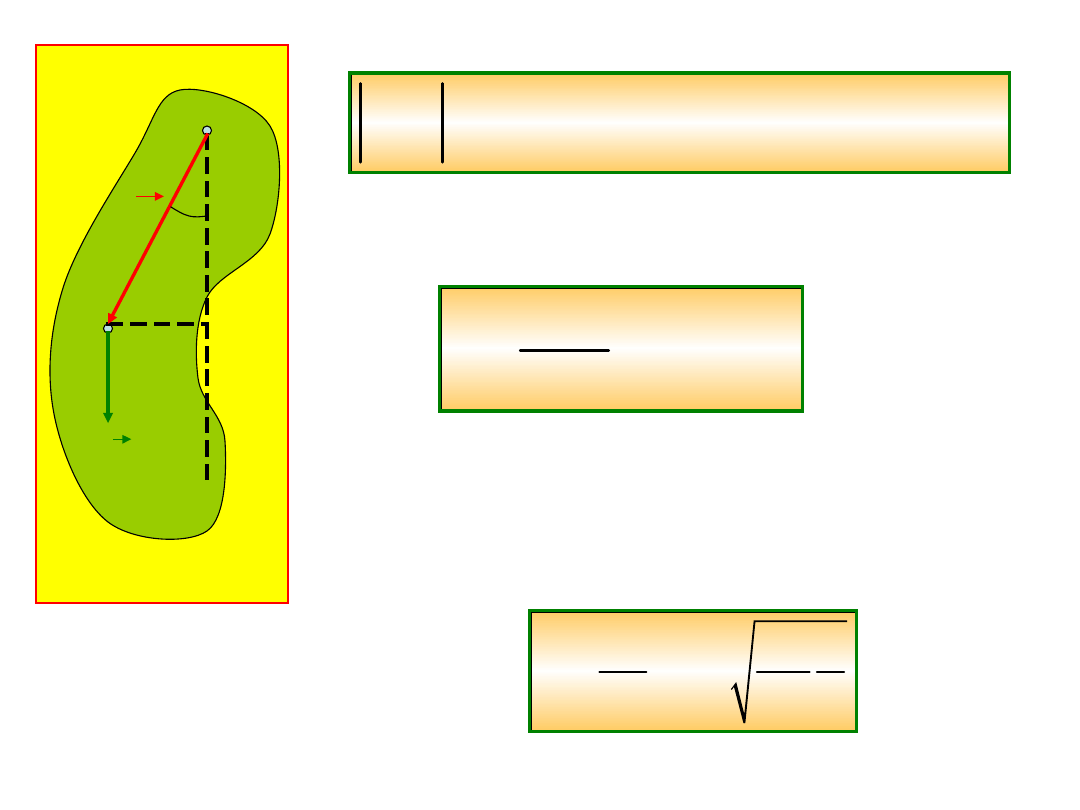
Transformacja
Galileusza
Jeżeli przyjmiemy, że zdarzenie w układzie inercjalnym A opisane
jest współrzędnymi czasoprzestrzennymi (x,y,z,t), a w układzie
inercjalnym B przemieszczającym się z prędkością v w kierunku
osi x, są to odpowiednio (x',y',z',t'), to transformacja
współrzędnych będzie opisana układem równań:

Winda jako układ inercyjny i
nieinercyjny
Winda jest układem
nieinercyjnym
a nawet inercyjnym
Klasyk
II Zasada Dynamiki
Newtona
• Lex II. Mutationem motus
proportionalem esse vi motrici
impressae, et fieri secundum lineam
rectam qua vis illa imprimitur.
’’Zmiana ruchu jest proporcjonalna do
przyłożonej siły poruszającej i odbywa
się w kierunku prostej, wzdłuż której
siła jest przyłożona.’’
• W wersji zwanej uogólnioną (uogólniona druga zasada dynamiki),
Jeśli na spoczywające
ciało nie działa żadna
siła to pozostaje ono w
spoczynku. Jeśli ciało
porusza się ruchem
jednostajnym, ze stałą
prędkością, to w tym
stanie ruchu będzie
pozostawać dopóki nie
zacznie na nie działać
siła zewnętrzna.
a
m
F
m
F
a
F
AB
= - F
BA
II Zasada dynamiki
Newtona
Stąd
a
m
F
m
F
a
F
F
a
m
F
F
Stąd
III Zasada Dynamiki
Lex III. Actioni contrariam semper et aequalem esse
reactionem; sive corporum duorum actiones in se mutuo
semper esse aequales et in partes contrarias dirigi.
F
AB
= - F
BA
Względem każdego działania istnieje przeciwdziałanie zwrócone
przeciwnie i równe, to jest wzajemne działania dwóch ciał są
zawsze równe i zwrócone przeciwnie.
III Zasada dynamiki, słuszna tylko w mechanice nierelatywistycznej, zwana jest
zasadą akcji i reakcji. Zasada ta zakłada, że oddziaływania rozchodzą się w
przestrzeni z nieskończoną prędkością. Doświadczenia wskazują, że wszystkie
oddziaływania rozchodzą się ze skończoną prędkością nieprzewyższającą
prędkości światła. Zgodnie ze współczesnymi poglądami w zasadach dynamiki
należy rozumieć: ciało – punkt materialny, ruch – ruch względem układu
odniesienia będącego układem inercjalnym. Zasady dynamiki mają swoje
wersje także dla ruchu obrotowego (punktu i bryły) oraz mogą być stosowane
w układach nieinercjalnych po uwzględnieniu sił bezwładności
.

Prawo powszechnego
ciążenia
Siła grawitacji
Według Newtona prawo powszechnego ciążenia
w układzie inercjalnym można podać w postaci;
gdzie G jest stałą grawitacji i
G=6.67·10
-11
Nm
2
/kg
2
.
m
1
i m
2
są masami dwóch ciał oddziałujących, ich masy
grawitacyjne. Są one źródłem
pola
grawitacyjnego.
W fizyce mówimy o polu wówczas, gdy
każdemu punktowi danej przestrzeni
możemy przyporządkować pewną wartość
jakiejś wielkości fizycznej – skalar, wektor
lub tensor.
Przykłady pól skalarnych i wektorowych wielkości podane są na następnej
stronie
r
r
r
m
m
G
F
2
2
1

Siłę, która nadaje ciału przyśpieszenie
ziemskie g, nazywamy ciężarem. F = m g
Z drugiej strony przyspieszenie
to stosunek siły do masy
Tylko wtedy, gdy masa grawitacyjna jest równa
bezwładnej wszystkie ciała w polu ziemskim mają
to samo przyśpieszenie.
I tak właśnie jest nie tylko na Ziemi
Masa grawitacyjna i masa bezwładna
B
C
B
m
m
g
m
F
g

Zasady zachowania w Fizyce
Zasady zachowania występujące w fizyce są to prawa określające
stałość pewnych parametrów charakteryzujących układ fizyczny.
Do najważniejszych należą zasady zachowania:
energii,
pędu,
krętu,
ładunku elektrycznego,
liczby barionowej,
liczb leptonowych,
parzystości kombinowanej CPT.
Zasady zachowania wynikają (
twierdzenie
Noether
) z
niezmienniczości równań opisujących stan układu względem
pewnych transformacji.

istnieją różne rodzaje energii:
-grawitacyjna,
-kinetyczna,
-elektryczna,
-magnetyczna,
-potencjalna,
-chemiczna,
-jądrowa,
-energia promieniowania, i inne.
energię kinetyczną istniejącą zawsze przy
ruchu ciał, oraz o energię potencjalną ściśle
związanej z działaniem sił.
Zasada zachowania energii

W mechanice klasycznej obowiązują zasady
zachowania;
energii, pędu i momentu pędu
.
Te trzy zasady można traktować jako
konsekwencje pewnych symetrii.
Zasada zachowania energii
wynika więc z
niezmienniczości
względem przesunięcia w czasie. Inaczej
mówiąc, jeżeli w każdej chwili czasu
zasada
wariacyjna najmniejszego działania,
oraz
równania ruchu opisujące układ nie zmieniają
się , to energia układu w tych chwilach jest
taka sama.
Moc
Pracę i energią mierzy się w tych samych
jednostkach. Bardzo często interesuje nas
zdolność wykonywania pracy przez pewne
urządzenia w ciągu określonego czasu.
Definiujemy wtedy
moc,
jako pracę wykonaną
w jednostce czasu.
dW d
P
F dr
F v
dt
dt
r
r
r
r
Jednostką mocy jest jeden wat.
1W = 1J/s = [kg·m
2
·s
-3
Zasada zachowania pędu
korzystając z 3 zasady dynamiki Newtona
znajdziemy dodatkową regułę dotyczącą
oddziaływania pomiędzy ciałami, która
podobnie jak zasada zachowania energii jest
ważna dla wszystkich sił niezależnie od tego,
czy siły te szczegółowo znamy czy nie.
zasada akcji i reakcji
F
2
1
F
12
Wiemy, że,
12
21
12
21
0
F
F
F
F
r
r
r
r
Zasadę akcji i reakcji da się uogólnić
na wiele ciał.
Suma wszystkich sił działających pomiędzy
tymi ciałami jest równa zero.
Siły takie nazywamy
siłami wewnętrznymi
i ich
suma jest równa 0, gdyż siły te się znoszą
parami.
F
2
1
F
32
F
13
F
31
F
23
F
12
1
0
N
ik
i k
i k
F
r
Z zasady tej ważnej tylko
dla sił wewnętrznych
znajdziemy regułę.
1 1
2 2
12
21
(
)
(
)
0
d mv
d mv
F
F
dt
dt
r
r
Przez całkowanie tego równania otrzymujemy;
1 1
2 2
mv mv
p const
r
r
r
Całkowity pęd p układu dwóch ciał nie
zmienia się pod wpływem działania sił
wewnętrznych
.
Równanie to możemy uogólnić dla układu
N
ciał oddziaływujących tylko przez siły
wewnętrzne.
1
N
i i
i
mv
p const
r
r
Równanie
to
stanowi zapis
zasady
zachowania pędu
dla układu N izolowanych ciał.
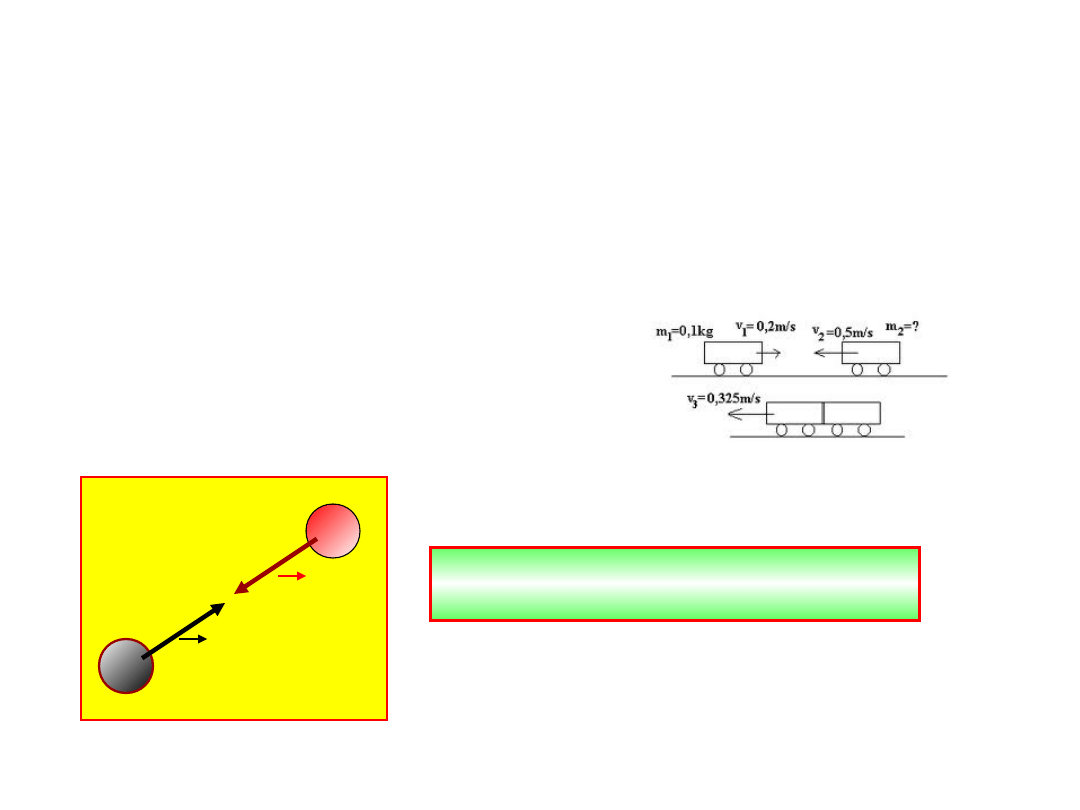
Zderzenia ciał Zasada
zachowania pędu
W czasie zderzenia działają przez krótki okres czasu pomiędzy
partnerami zderzenia siły. Siły wewnętrzne w czasie zderzenia są
zdecydowanie silniejsze od sił zewnętrznych.
Zasada zachowania pędu i
energii zastosowana
do sytuacji przed i po zderzeniu, często pozwala
nam przewidzieć efekt końcowy zderzenia
.
'
'
1 1
2 2
1 1
2 2
mv mv
mv mv
r
r
r
r
m
1
m
2
m
1
+
m
2
v
1
v
1
’
przed
zderzeniem
po
zderzeniu
Zderzenie niesprężyste gdy kulki
po zderzeniu są razem
2
'
1 1
1
1
0 (
)
mv
m m v
r
r
Zderzenie sprężyste
A poniżej niesprężyste
Ruch prostoliniowy
Jeżeli tor ruchu ciała jest linią prostą, to
zawsze możemy tak dobrać układ
współrzędnych, aby jedna z jego osi
pokrywała się z torem. Zwykle wybiera się oś
x.
x
r
x
i
t
x
t
x
t
r
ˆ
)
(
)
(
)
(
Energia kinetyczna i potencjalna
Rozważmy ciało o masie m znajdujące się pod
działaniem siły F(r). Zadajmy sobie pytanie,
czy istnieje jakaś wielkość fizyczna, która się
w trakcie ruchu nie zmienia
x
y
z
A
B
dr
r(t)
r(t
0
)
F
m
Ruch jednostajny
Ruch jednostajny, jest to taki ruch, w którym
prędkość jest stała, v=const.
)
(
)
(
0
0
0
0
0
0
t
t
v
x
x
t
t
v
dt
v
dt
v
x
x
t
t
t
t
.
x jest przebytą przez ciało drogą, którą zwykle
oznaczaliśmy przez s.
Wykres drogi od czasu
ma więc postać:
s
t
x=x
0
+
v(t
-t
0
)
t
0
x
0
t
s=x
x
0
v
0
t
1/2at
2
Narysujmy drogę
którą ciało przebywa w czasie t
przy założeniu, że t
o
= 0.
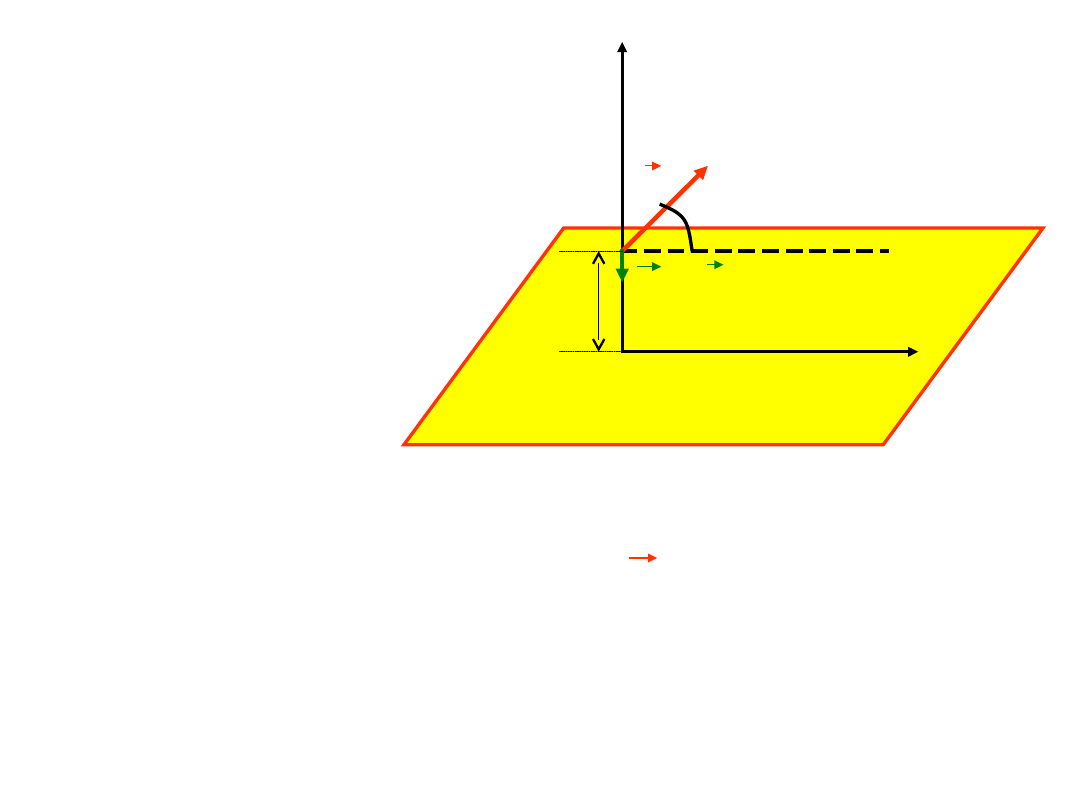
x
y
g = -g i
y
v
0
h
W polu ciężkości na wysokości h
wyrzucamy pod kątem do poziomu z
prędkością
v
0
jakieś ciało.
Możemy tu rozróżnić następujące przypadki:
Rozważmy
następujący ruch.
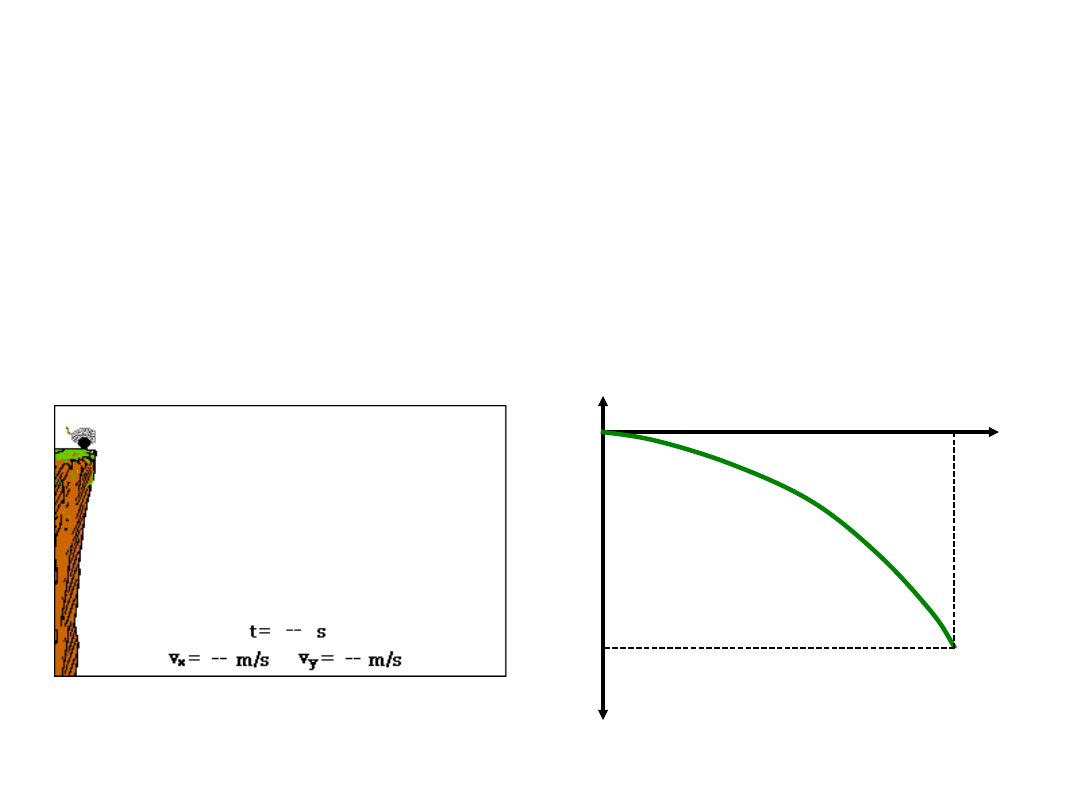
Rzut poziomy
Kula armatnia została wystrzelona poziomo ze
stałą prędkością v
0x
=100 m/s. Kula spadła na
ziemię w odległości 1200 m od miejsca
wystrzelenia . Jaka jest długość drogi pionowej
jaką przebyła kula przy zaniedbaniu oporu
powietrza.
x
y
x = 1200 m
y = ?

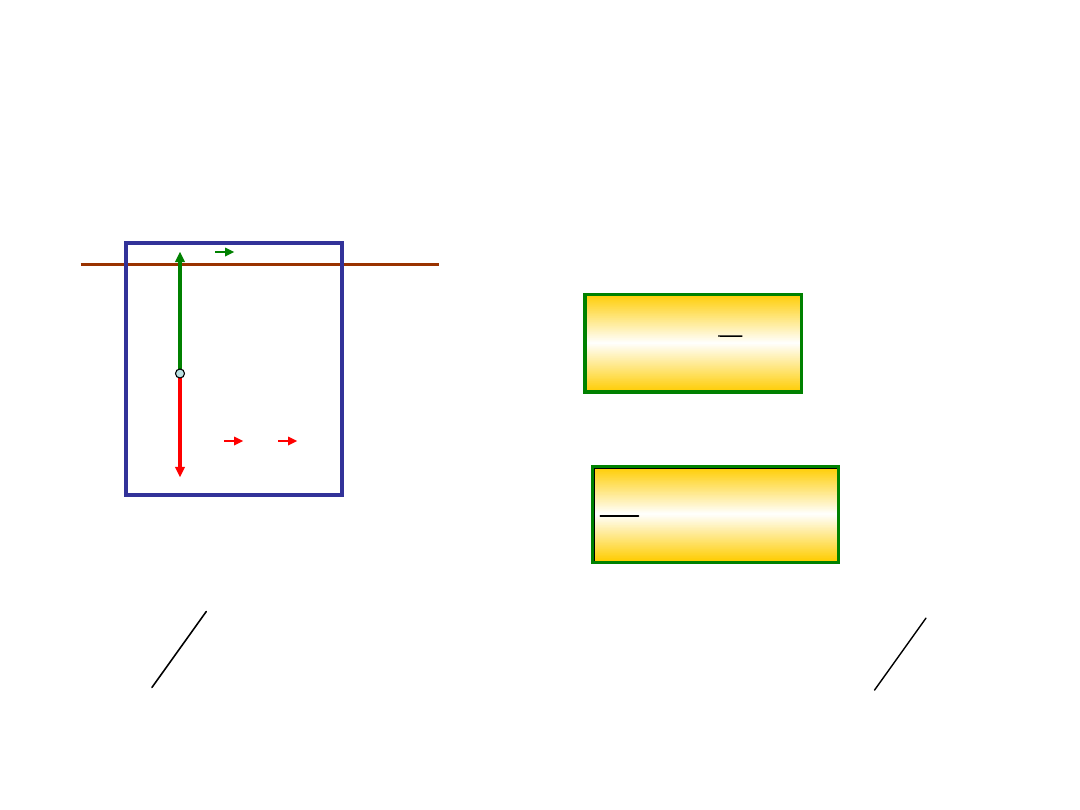
Zasada superpozycji
ruchów
Zauważmy, że rozważaliśmy ruch
poziomy
niezależnie od ruchu
pionowego
aby wyznaczyć
czas lotu kamienia.
Ruch pionowy jest spadkiem swobodnym, dla którego
mamy:
v
0y
= 0
oraz
a
y
=-g =-9.81 m/s
2
.
Z równania (2.9a) dla ruchu w kierunku osi y mamy
y = -1/2 g t
2
= -1/2 · 9.81 m/s · (12m)
2
= 706.32 m
Zauważmy, że rozważaliśmy ruch
pionowy
niezależnie od ruchu
poziomego
aby wyznaczyć
wysokość spadku kamienia.
Niezależność tych dwóch ruchów implikuje, że pocisk
przy
v
0x
= 0
w czasie
12 s
spadnie o
706.32 m
.
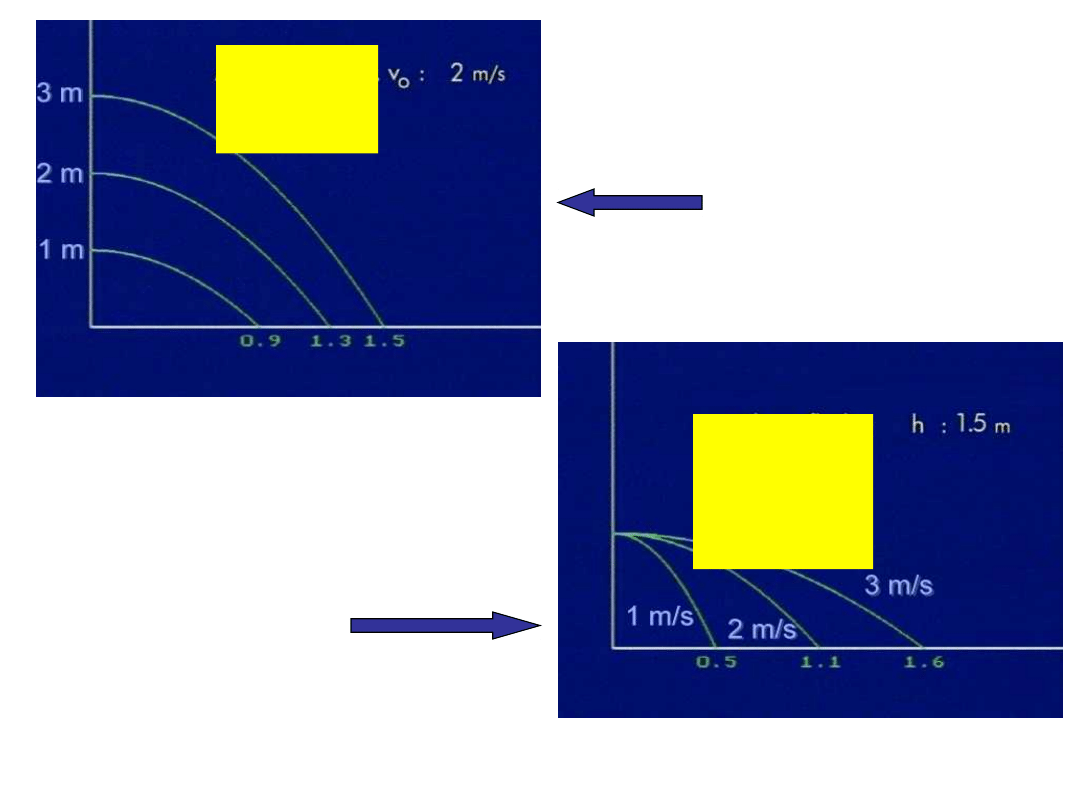
Prędkość
początko
wa
Wysokoś
ć
początko
wa
Ta sama prędkość
początkowa z
różnych wysokości
Ta sama wysokość,
różne prędkości
początkowe
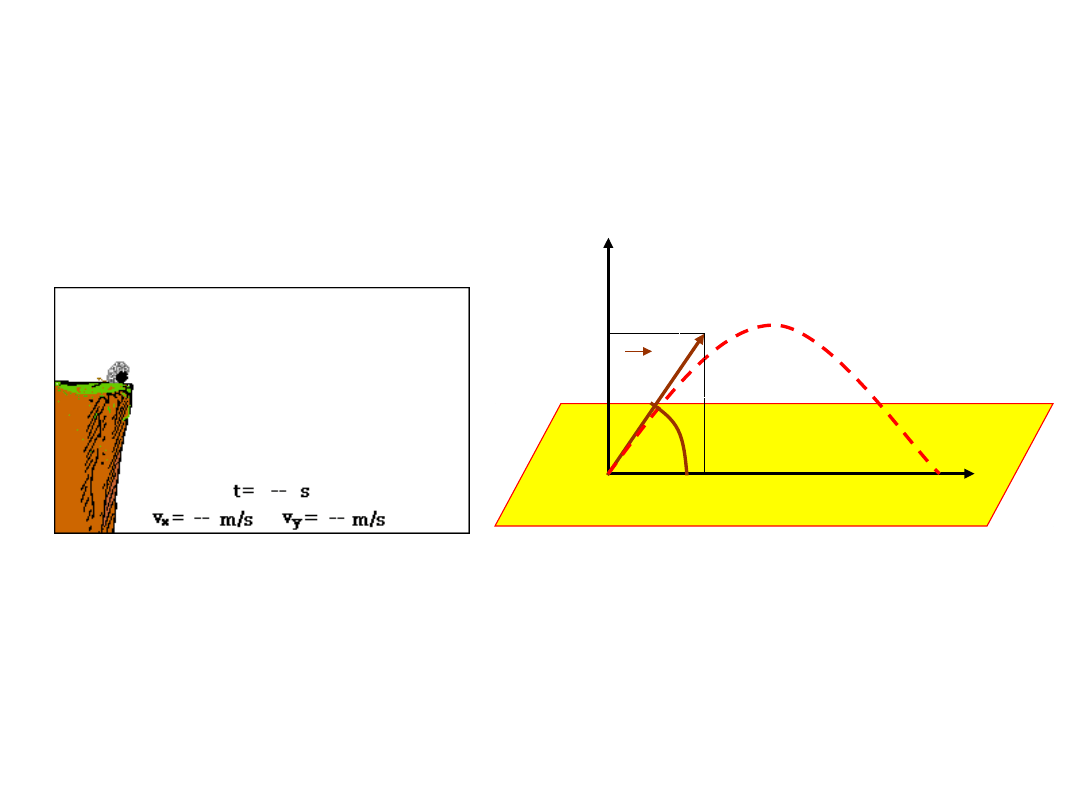
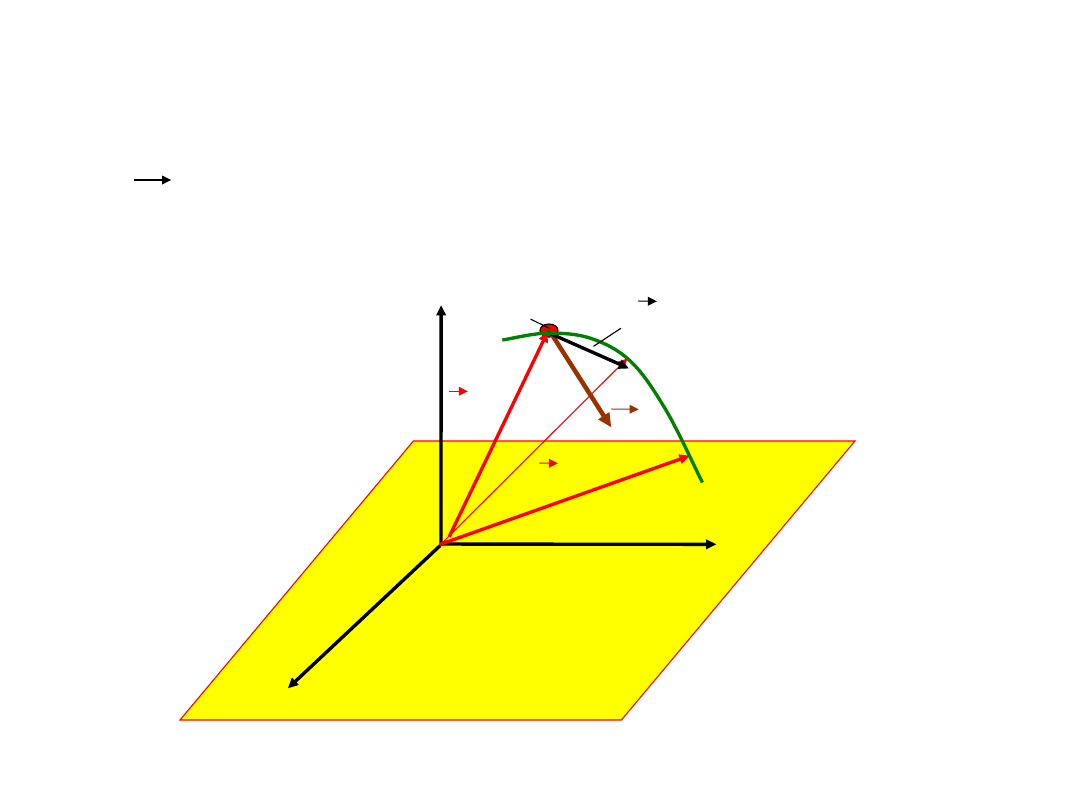
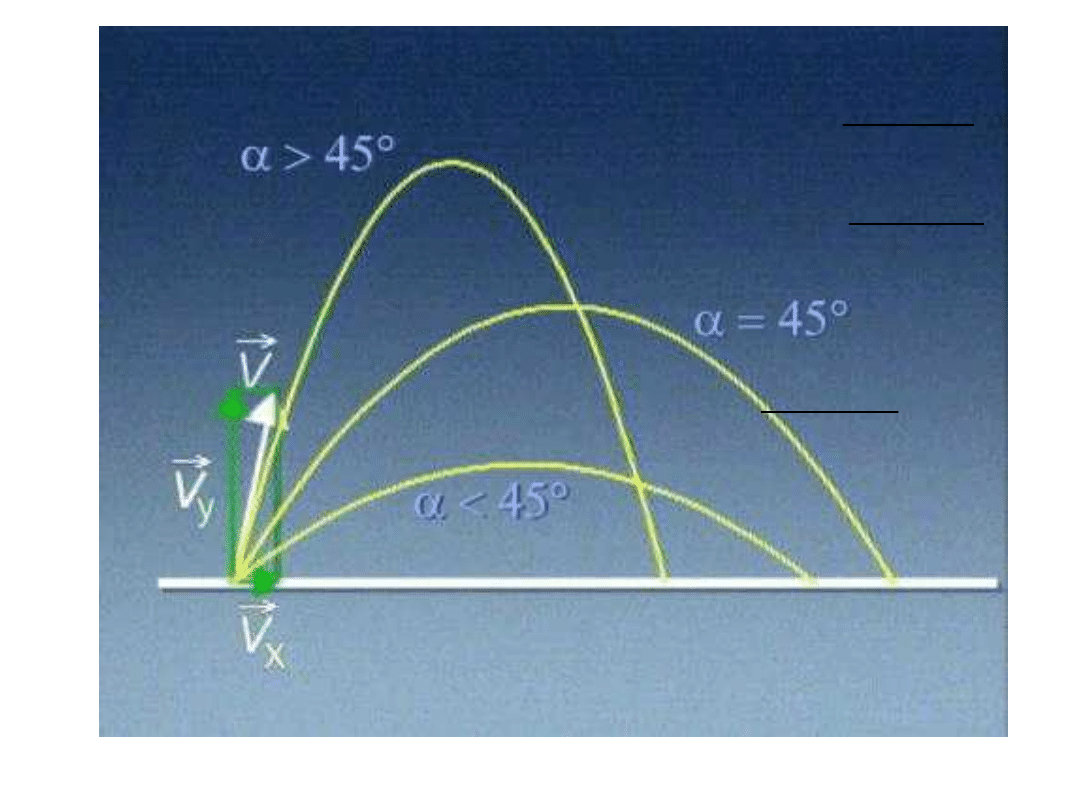
Rzut
ukośny
Jest to przypadek, dla którego:
h = 0 lub h 0, 0 < < 90
0
, v
0
0.
y
x
v
0
Składowe prędkości
początkowej
wynoszą:
sin
v
v
cos
v
v
0
0
0
0
y
x
Rzut ukośny charakteryzują
następujące wielkości:
1. Zasięg rzutu,
2. Maksymalna wysokość
Zasięg rzutu otrzymamy
licząc odległość
poziomą x dla y=0.
Równanie to ma dwa
rozwiązania:
2
0
0
2
1
v
)
(
v
)
(
t
g
t
t
y
t
t
x
y
x
0
cos
v
2
2
2
2
0
x
g
tg
x
2
sin
v
cos
v
2
0
2
0
2
2
0
2
max
1
g
g
tg
x
x
x
Maksymalną wysokość rzutu otrzymamy
licząc maksimum funkcji przedstawiającej
równanie toru, czyli dla dy/dx=0.
0
cos
2
2
2
2
0
x
v
g
tg
Otrzymujemy
więc:
max
2
0
2
1
2
sin
2
x
g
v
x
.
Podstawiając wyrażenie na x do równania
(2.13), otrzymujemy na maksymalną
wysokość poruszającego się rzutem ukośnym
wartość:
2
2
0
max
sin
2g
v
y
.
Widzimy z podanych wzorów, że zarówno
maksymalny zasięg rzutu jak i maksymalna
wysokość rzutu zależą od wartości i kierunku
prędkości początkowej.
Wysokość rz.:
g
v
y
2
sin
2
2
0
max
Zasięg rz.:
g
v
x
2
sin
2
0
max
Tor ruchu
przedstawia
przesunięta parabola
g
y
2
sin
v
2
2
0
max
Należy jeszcze wspomnieć o szczególnym
przypadku rzutu ukośnego, a mianowicie
rzutu pod kątem = 90
0
z prędkością
początkową v
0
. Taki przypadek nazywamy
rzutem pionowym
.
v
0
v = g
t
Przebywana w czasie t
droga wynosi:
2
0
2
1
gt
t
v
s
Maksymalną wysokość
uzyskamy z warunku
0
0
gt
v
dt
ds
.
Czas ruchu ciała do maksymalnej wysokości h
wynosi więc:
, a uzyskana maksymalna wysokość
.
g
v
t
0
g
v
h
2
2
0
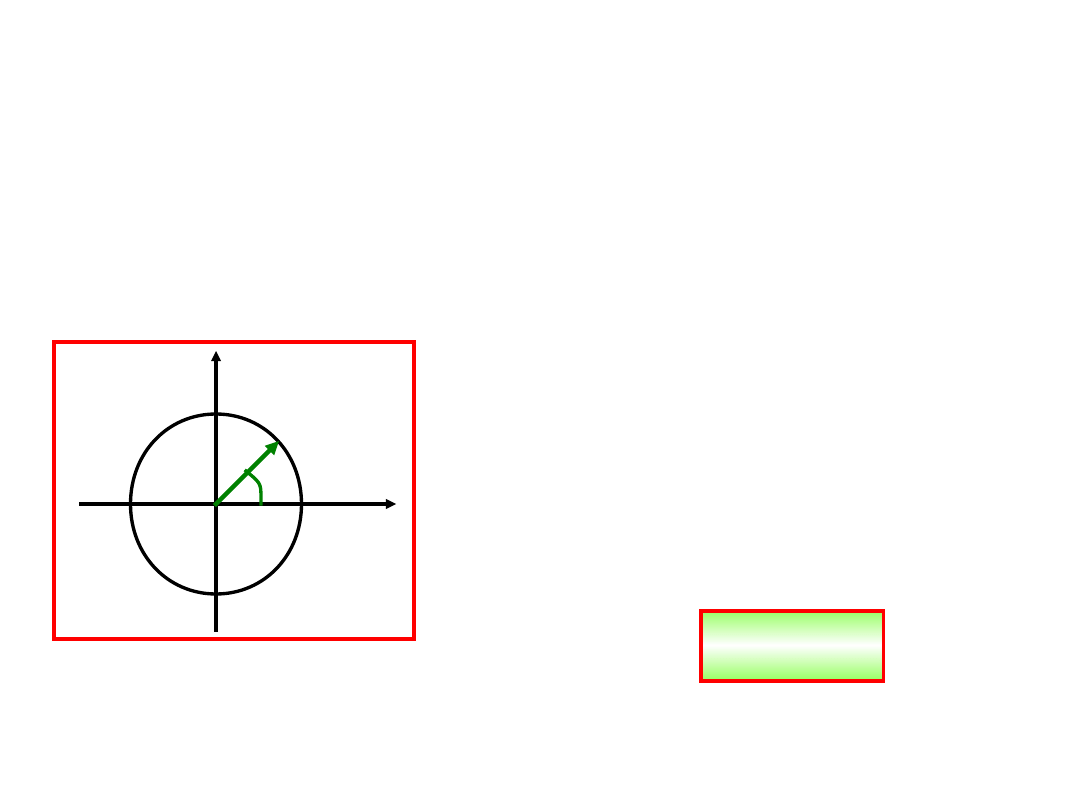
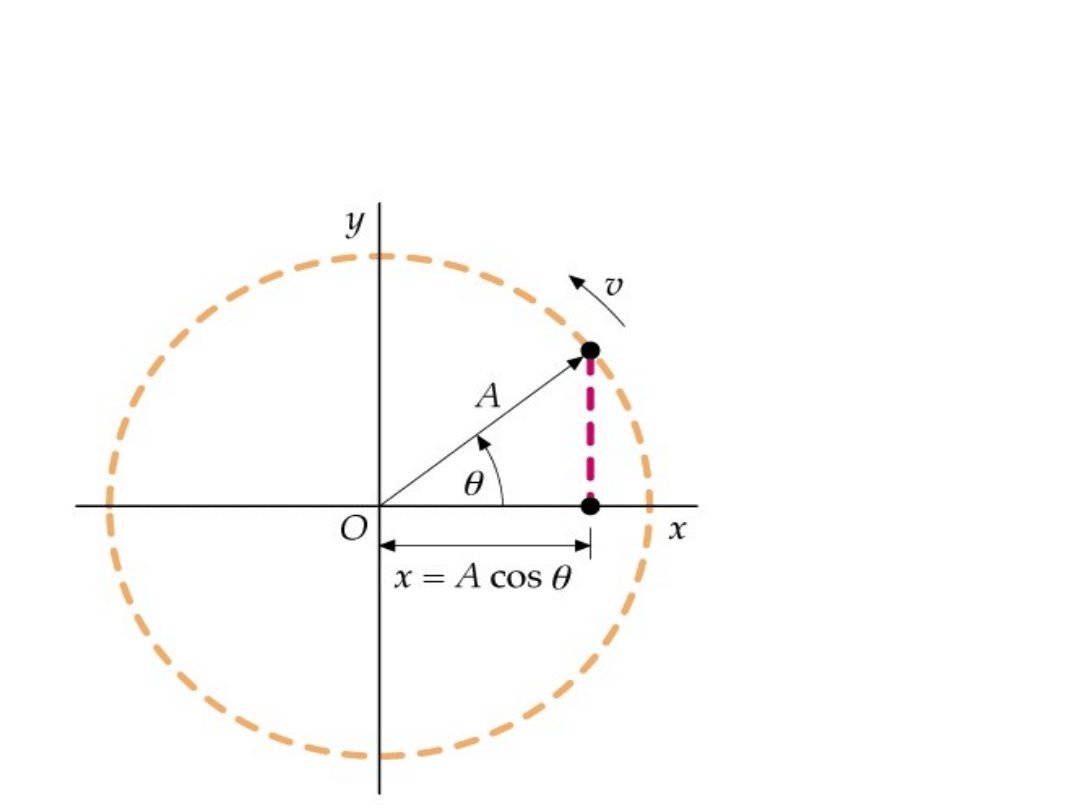
Ruch jednostajny po
okregu
Początek układu współrzędnych wybieramy w środku
koła, po którym odbywa się ruch. Położenie punktu
na na kole możemy podać jednoznacznie przez
podanie kąta biegunowego i odległości r od
początku układu.
y
x
r
s
Ruch ciała określony jest
przez funkcję
= (t),
definiująca tzw. drogę
kątową.
Jeśli przez s oznaczymy
drogę, którą ciało przebyło
po okręgu w czasie gdy
przebyło ono drogę kątową
, to
r
s
(2.15)
Różniczkując to równanie obustronnie,
otrzymujemy;
.
Pod wpływem działania siły F ciało zmienia w czasie dt swój pęd,
dp F dt
r
r
oraz położenie
dr v dt
r r
Eliminując z tych równań dt otrzymujemy;
0
v dp F dr
r
r r
r
To ostatnie równanie możemy napisać jako:
0
p dp
F dr
m
r
r
r
r
Wykorzystując fakt, że
(
)
2
d p p
dp p p dp
p dp
r r
r r
r r
r
Możemy równanie (4.4) zapisać jako;
B
A
W
F dr
r
r
.
Z równania tego widzimy również, że praca
może być wykonana tylko przez składową siły
styczną do drogi.
Policzmy dla przykładu jaką pracę musimy
wykonać wydłużając sprężynę z położenia
równowagi o x. Zgodnie z prawem Hooke’a
sprężyna sprzeciwia się rozciąganiu z siłą
F=-cx. Wobec tego
2
0
0
2
x
x
c
W
Fdx
c xdx
x
Praca ta jest ujemna, gdyż sprężyna nie
wykonuje pracy, tylko ją podejmuje.
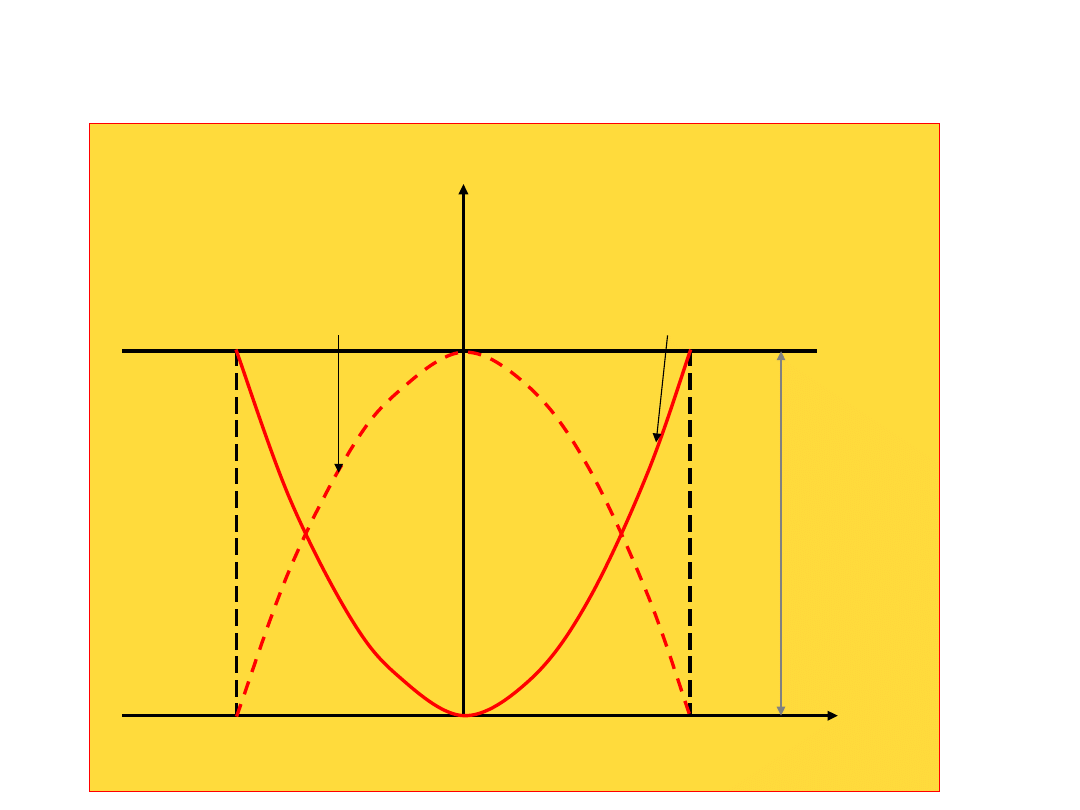
energia
x
E
k
=E-E
p
E
kmax
=E
E
p
=c/2x
1
2
E
p
=c/2x
2
E
pmax
E
k
=0
-x
1
x
1
Praca i energia potencjalna
przy podnoszeniu ciężaru
Jeśli podniesiemy masę
m
wbrew sile
grawitacji na wysokość
h
(niewielkiej
względem promienia Ziemi), wymaga to
wykonania pracy zwiększającą energię
potencjalną masy m ;
p
E
mgh
Jeśli pozwolimy masie
m
spaść z wysokości
h
,
wzrasta jej prędkość, a tym samym energia
kinetyczna, równocześnie spada energia
potencjalna masy m. Jednak sumaryczna
energia pozostaje niezmieniona.
Energia
h
E
k
E
p
E=mg
h
E
pmax
=E
kin
2
2
2
m
v
mgh
v
gh
Siły zachowawcze i niezachowawcze
Ogólnie dzielimy siły na dwie klasy, siły
zachowawcze i siły niezachowawcze.
Rozróżnienie pomiędzy nimi jest oparte na
wielkości pracy jaką siła wykonuje na drodze
zamkniętej.
Siły zachowawcze są to takie siły dla których
praca po drodze zamkniętej jest równa zero.
0
F ds
r r
�
Siły tarcia są siłami niezachowawczymi.
Ogólnie biorąc siłami niezachowawczymi są
siły zależne od czasu i siły zależne od
prędkości.
Należy podkreślić, że suma energii
potencjalnej i kinetycznej jest stała tylko dla
sił zachowawczych.
Zależy od drogi. Możemy więc podać inną
definicję siły zachowawczej
B
A
F ds const
r r
niezależnie od drogi pomiędzy A i B.
B
A
Siły są zachowawcze,
jeśli w czasie ruchu
pod wpływem tych sił
spełniona jest
zasada
zachowania energii
mechanicznej.
Możemy również
stwierdzić, że
Tak jest w polu sił zachowawczych
Czyli polu potencjalnym
Przykłady energii potencjalnych sił
zachowawczych
1. Energia potencjalna sprężyny
2
1
2
p
E
cx
E
p
x
2. Energia Potencjalna stałej siły
ˆ
x
F
mgi
r
0
ˆ ˆ
(
)
x
p
x
x
E
mgi i dx
mgx
( )
p
E x
mgx
E
p
x
3 Energia potencjalna uniwersalnej siły
grawitacji
1 2
2
mm
F G
r
r jest odległością masy m
1
od
masy m
2
.
0
r
p
r
E
F ds
r
r
Załóżmy, że liczymy zmianę energii
przy przesunięciu masy m
2
z
nieskończoności do r.
1 2
1 2
2
1 2
( )
( )
1
1 1
p
p
p
r
r
E
E r
E
mm
G
dr Gmm
r
r
Gmm
r
( ) 0
p
E
1 2
( )
p
Gmm
E r
r
r
E
p
Praca i energia potencjalna dla sił
elektrostatycznych
Pomiędzy dwoma ładunkami q
1
i q
2
umieszczonymi w odległości r od siebie działa
wzdłuż wektora r siła elektrostatyczna zgodnie z
prawem Coulomba,
1
2
2
q q r
F k
r
r
r
r
Jaką pracę wykona ta siła, jeśli ładunek q
2
przesuniemy z punktu P
1
do punktu P
2
.
2
2
1
1
1
2
1 2
2
2
1
1 1
r
r
r
r
q q
W
Fdr
k
dr
kqq
r
r
r
q
1
q
2
P
2
P
1
r
1
r
2
.
Oznacza to, że energia potencjalna E
p
= -W
zależy tylko od r
1
i r
2
. Często interesuje nas
pytanie jaką prace należy wykonać, aby
ładunek z nieskończoności przesunąć do
punktu P
2.
2
2
1 2
2
1
P
r
E
W
F dr kqq
r
r
E
p
q
1
·q
2
> 0
q
1
·q
2
< 0
przyciąganie
odpychanie
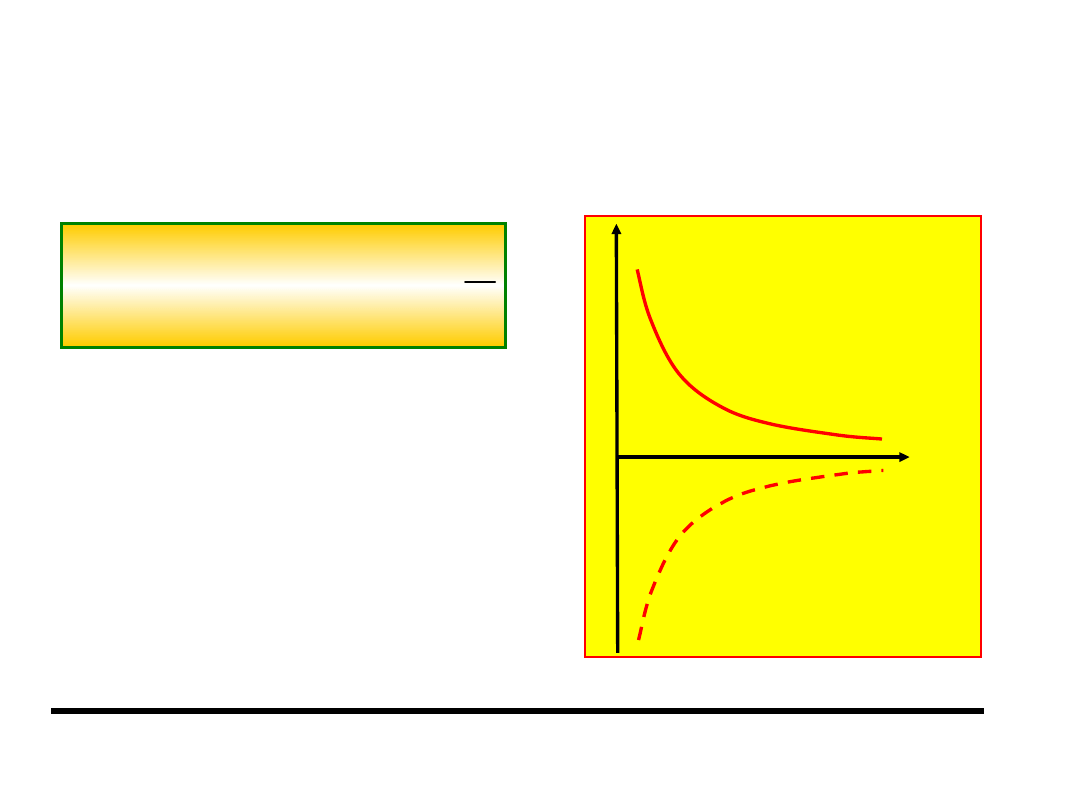
Kształt energii
potencjalnej
oddziaływania
elektrostatycznego
jest opisany taką samą
funkcją f(r) jak dla
oddziaływania
grawitacyjnego. Może
ona jednak być
również dodatnia, czyli
odpychająca.
2. Potencjał wykładniczy
0
0
( )
exp( / )
p
E r
V
r r
3. Potencjał Gaussa
2
2
0
0
( )
exp(
/ )
p
E r
V
r r
0
0
0
( )
( )exp( / )
p
r
E r
V
r r
r
4. Potencjał Yukawy
5. Potencjał
oscylatora
harmonicznego
2
2
0
0
2
0
0
( )
(
)
(
1)
p
V r
E r
r r
r r
E
p
(r)/V
0
r/r
0
p. Yukawy
p. Gaussa
p. jamy prostokątnej
p. wykładniczy
Jak wyglądają te potencjały?
1
p
E
k
const
r
,
są powierzchniami kul.
W jaki sposób można
policzyć
wielkość siły
działającej na elektron
w dowolnym miejscu.
Jeśli przesuniemy
elektron o dr, to
energia potencjalna
zmieni się o
p
dE
F dr
r r
Jeśli przesuniemy elektron po powierzchni
ekwipotencjalnej,
dE
p
= 0, czyli nie została wykonana praca.
Dynamika bryły sztywnej
x
’
y
’
P
a
C
v
’
x
’
y
’
P
’
x r
’
a
d
Reinhard Kulessa
69
Moment pędu bryły sztywnej
- Moment bezwładności
Rotujące ciało sztywne charakteryzuje się tym,
że wszystkie jego części poruszają się ze stałą
prędkością kątową wokół osi obrotu.
Weźmy płytę płaskorównoległą i rozważmy jej
obrót dookoła osi prostopadłej.
r
j
m
j
Pamiętamy, że
v
r
r
r r
.
Pamiętamy, że dla każdego układu cząstek
definicja momentu pędu jest następująca:
1
(
)
N
i
i
i
i
L
m r v
r
r r
Reinhard Kulessa
70
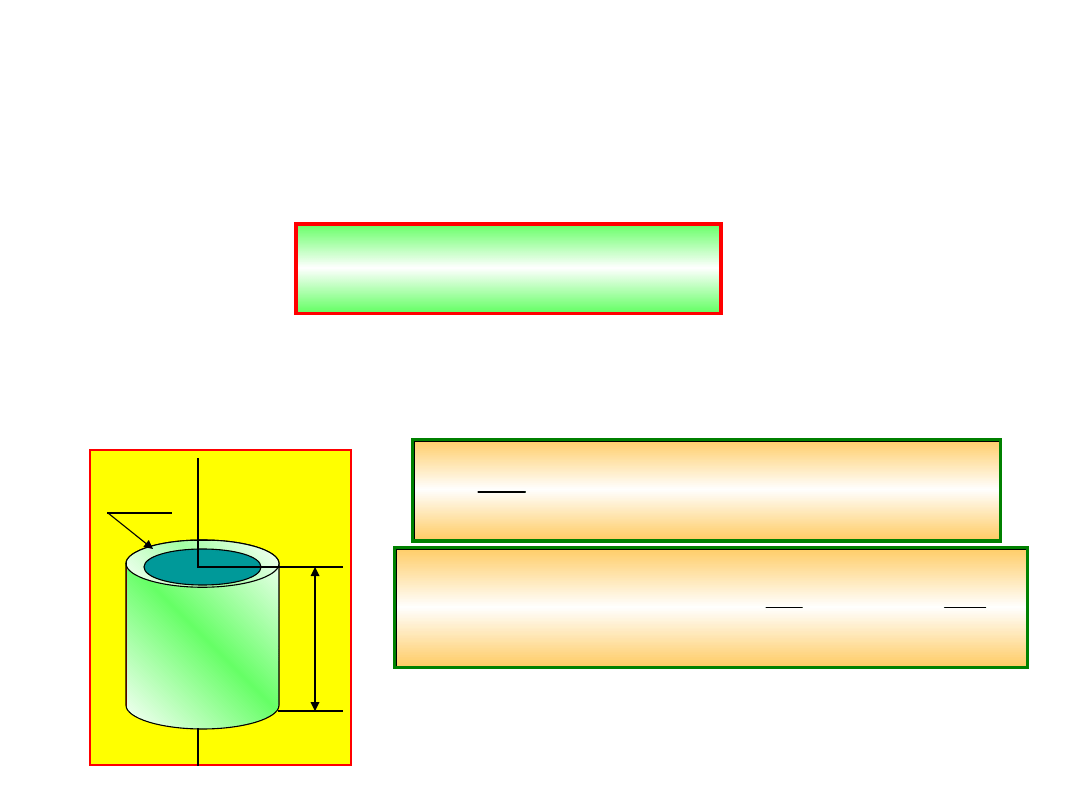
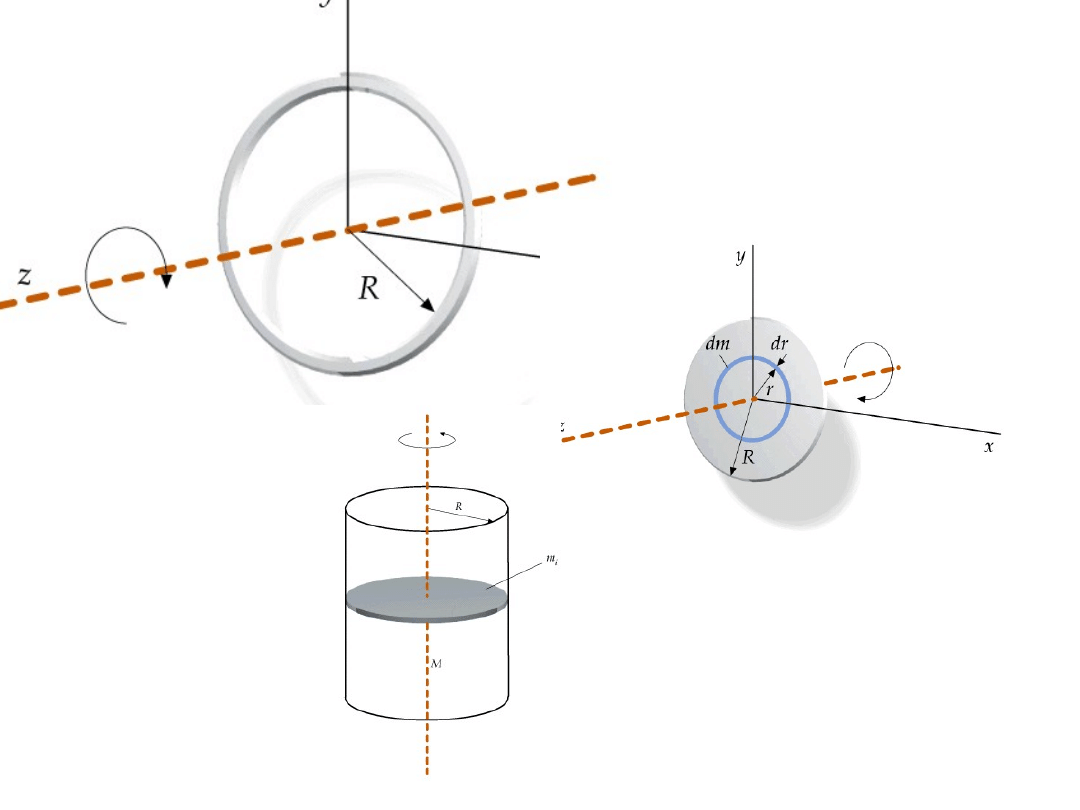
Twierdzenie Steinera
W ogólnym przypadku ciągłego rozkładu masy,
moment bezwładności musimy liczyć
przechodząc od sumowania do całkowania.
2
2
I
r dm
r dV
5.15)
.
Obliczmy dla przykładu moment bezwładności
pełnego walca względem jego osi.
r
0
l
dr
2
dm
const dm
dV
l
r dr
dV
0
4
2
2
0
0
0
2
2
4
2
r
r
M
I
r l
rdr
l
I
r
Masa walca jest równa
M =
r
0
2
l.
Reinhard Kulessa
71
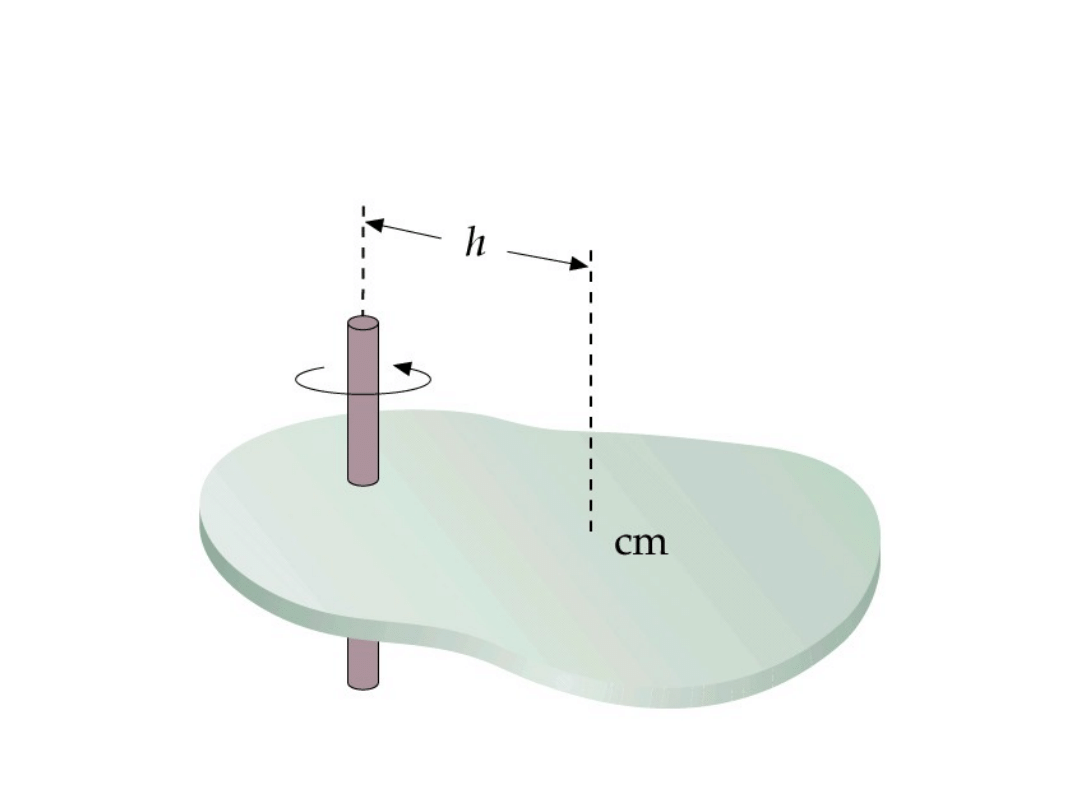
Moment bezwładności bryły względem osi
przechodzącej przez środek masy ciała jest
związany z momentem bezwładności względem
dowolnej osi.
O
S
h
R
i
R
iS
2
S
I I
Mh
.
Zależność podaje
twierdzenie Steinera.
Dynamika ruchu bryły sztywnej – druga
zasada
Pamiętamy z wzoru (5.3), że moment pędu
może zostać zmieniony tylko przez działanie
zewnętrznego momentu siły.
( )
z
dL d I
d
M
I
I
dt
dt
dt
r
r
r
r
r
W przypadku braku sił zewnętrznych
L
i
= L
f
i
wtedy
i
i
f
I
I
Rozważmy sobie jako przykład
wahadło fizyczne
.
Reinhard Kulessa
73
r
Mg
O
S
rsin
sin
O
M
Mgr
L I
I
r
&
& &&
Mamy więc równanie
sin
0
Mgr
I
&&
.
Dla małych wychyleń sin
, wtedy
otrzymujemy równanie
oscylatora harmonicznego z
2
=Mgr/I, z rozwiązaniem
2
1
2
I
T
Mr g
.
Reinhard Kulessa
74
Energia kinetyczna bryły
sztywnej
2
2
2
2
1
1
1
2
2
2
i
i i
i i
i
E
mv
mr
I
Sumując po wszystkich punktach otrzymujemy;
2
2
2
1
1
1
1
2
2
N
N
kin
i
i i
i
i
E
E
mr
I
.
Reinhard Kulessa
75
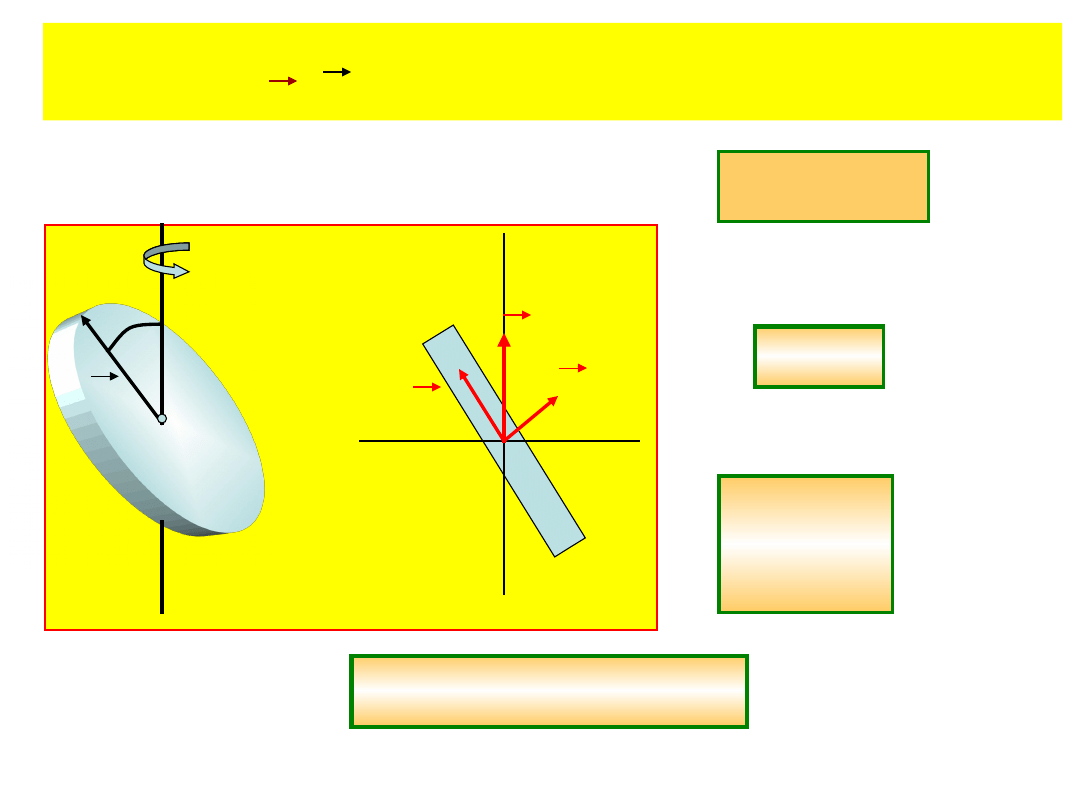
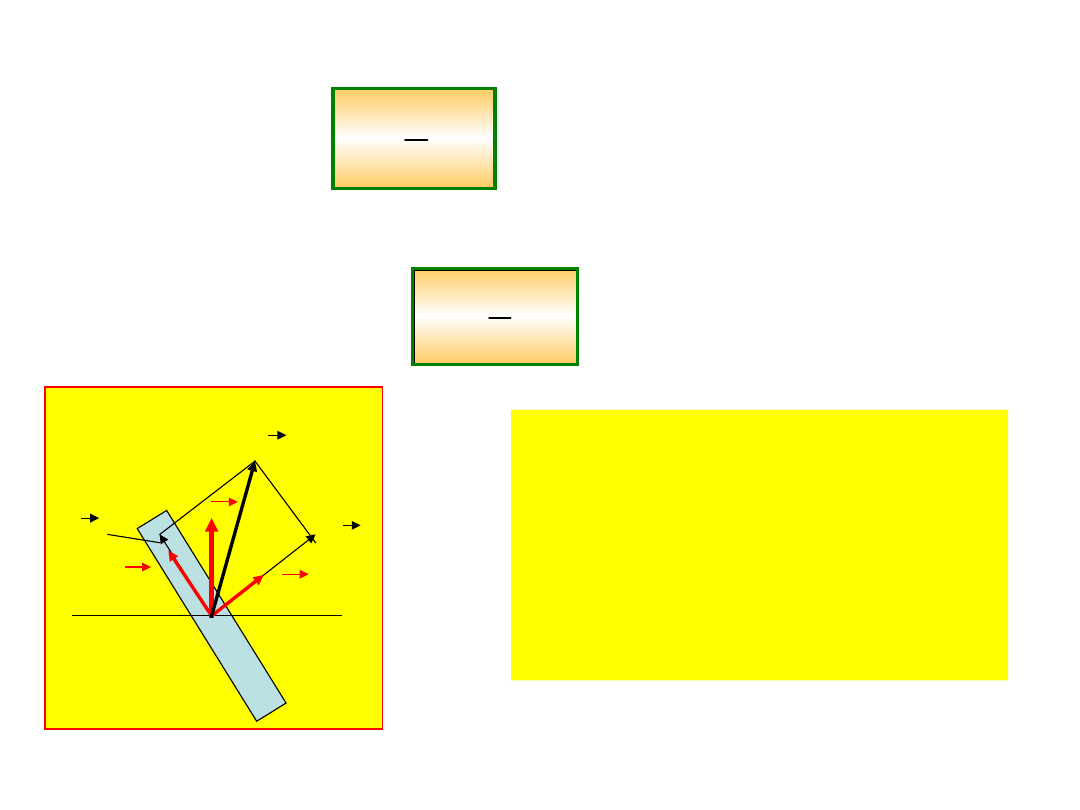
Tylko w przypadku rotacji względem osi
głównych momentu bezwładności
L .
r
o
ś
Rozważmy ogólny przypadek.
P
r
r
r
Pamiętamy, że
L I
r
r
.
Zachodzi więc;
||
|| ||
L
I
L
I
w
w
^
^ ^
=
=
r
r
r
,
||
|| ||
L L L
I
I
w
w
^
^ ^
= +
=
+
r
r
r
r
r
.
Reinhard Kulessa
76
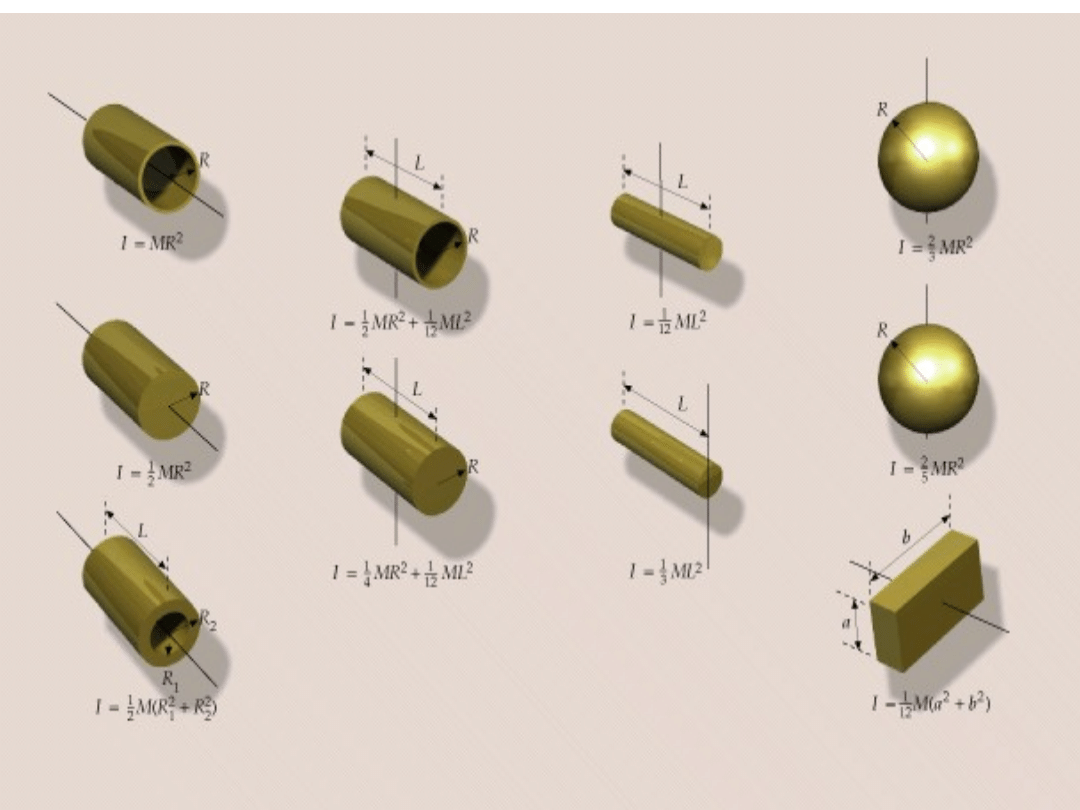
Moment bezwładności względem osi
równoległej do osi do
dysku jest równy , gdzie r jest
promieniem
dysku, a względem osi do niej prostopadłej,
czyli leżącej
wzdłuż średnicy dysku .
2
||
1
2
I
mr
=
2
1
4
I
mr
I
I
L
Widzimy, że przy
obrocie względem
dowolnej osi
moment pędu nie jest
równoległy do
prędkości kątowej.
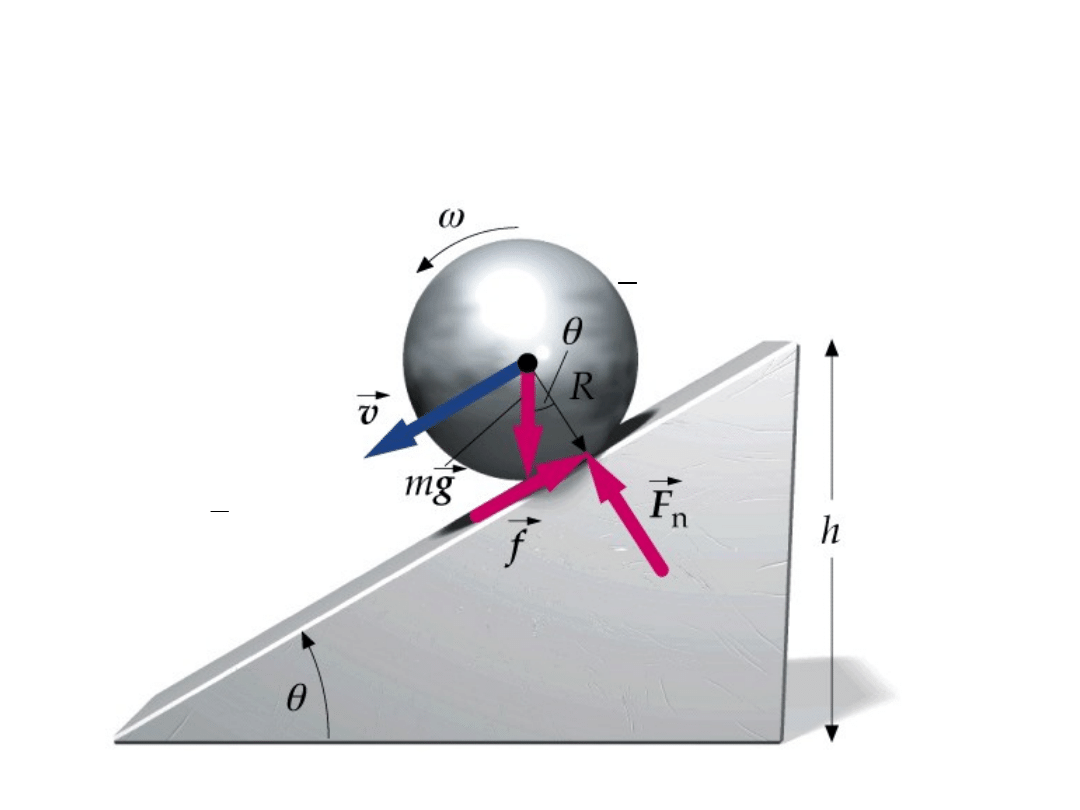
Jak staczać się po równi
pochyłej
2
cm
R
m
5
2
I
sinθ
g
7
5
a
cm
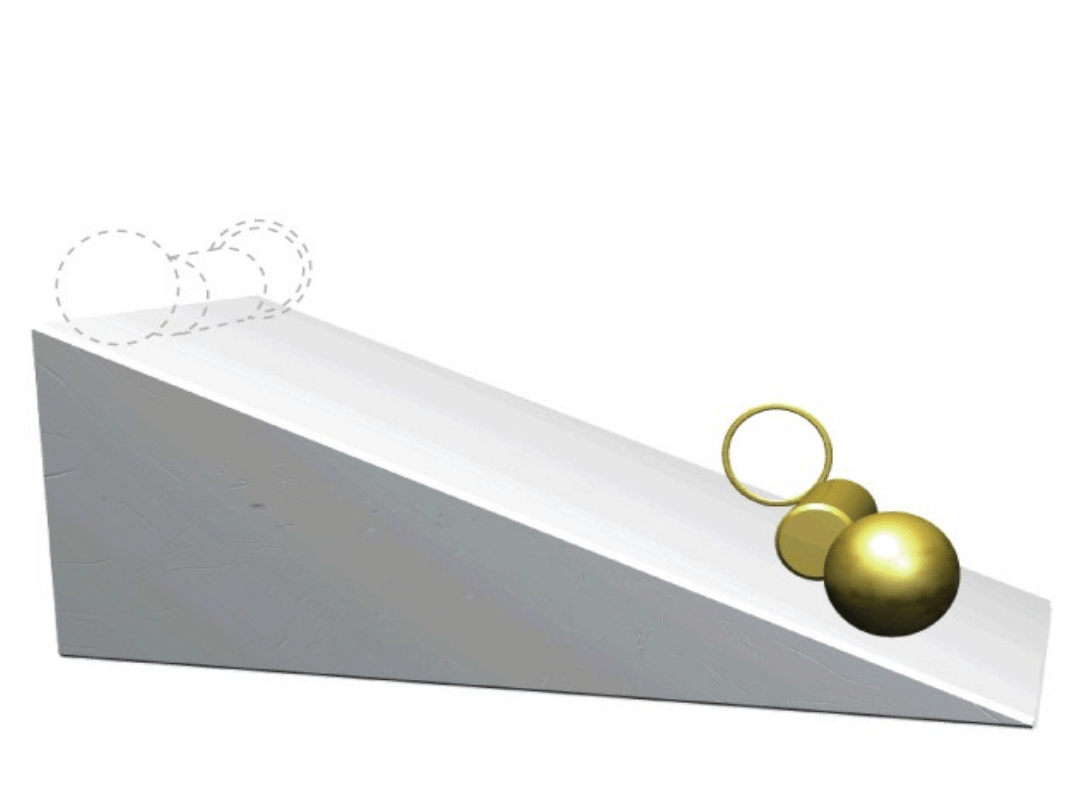
Przy tej samej wadze
decyduje rozkład masy
2
h
M
cm
I
I
Twierdzenie Steinera
Drgania i fale w ośrodkach
sprężystych.
Drgania i fale w ośrodkach
sprężystych.
Oscylator harmoniczny, drgania
cząsteczek, 2h
Zastosowanie rach. różniczkowego i
operatorowego w zagadnieniach fizyki
2h
Elementy akustyki. Propagacja fal 1h
Amplitu
da
Amplitu
da
Minimu
m
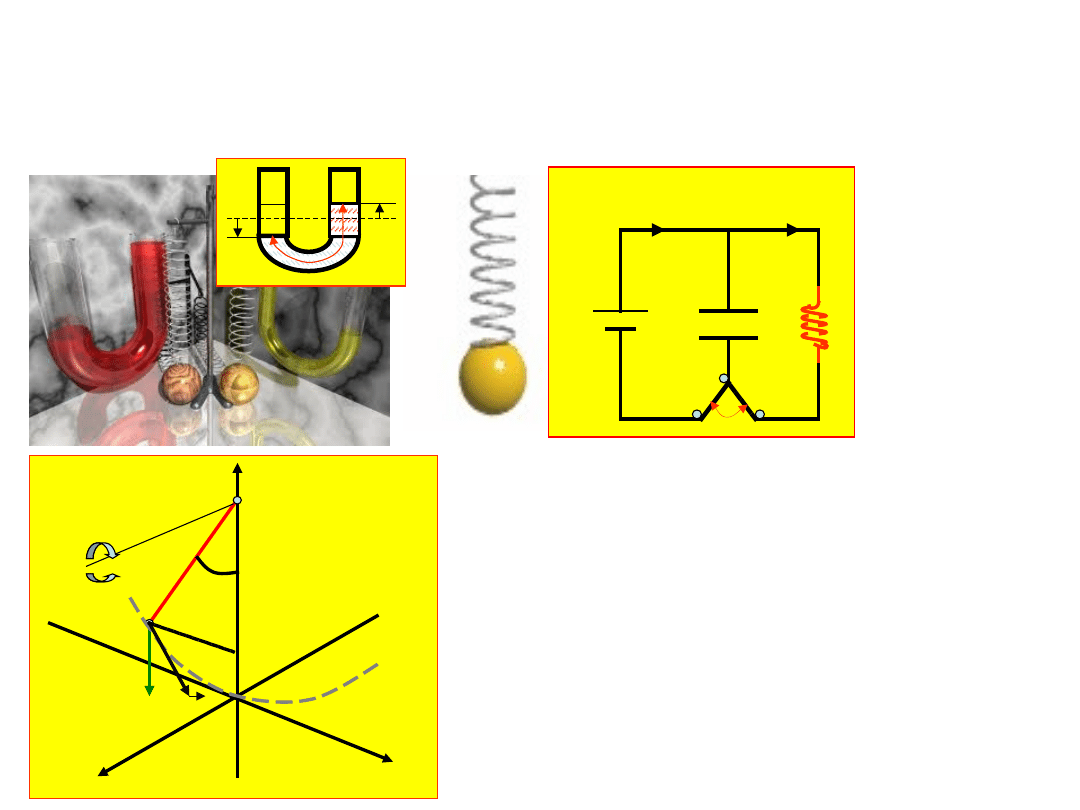
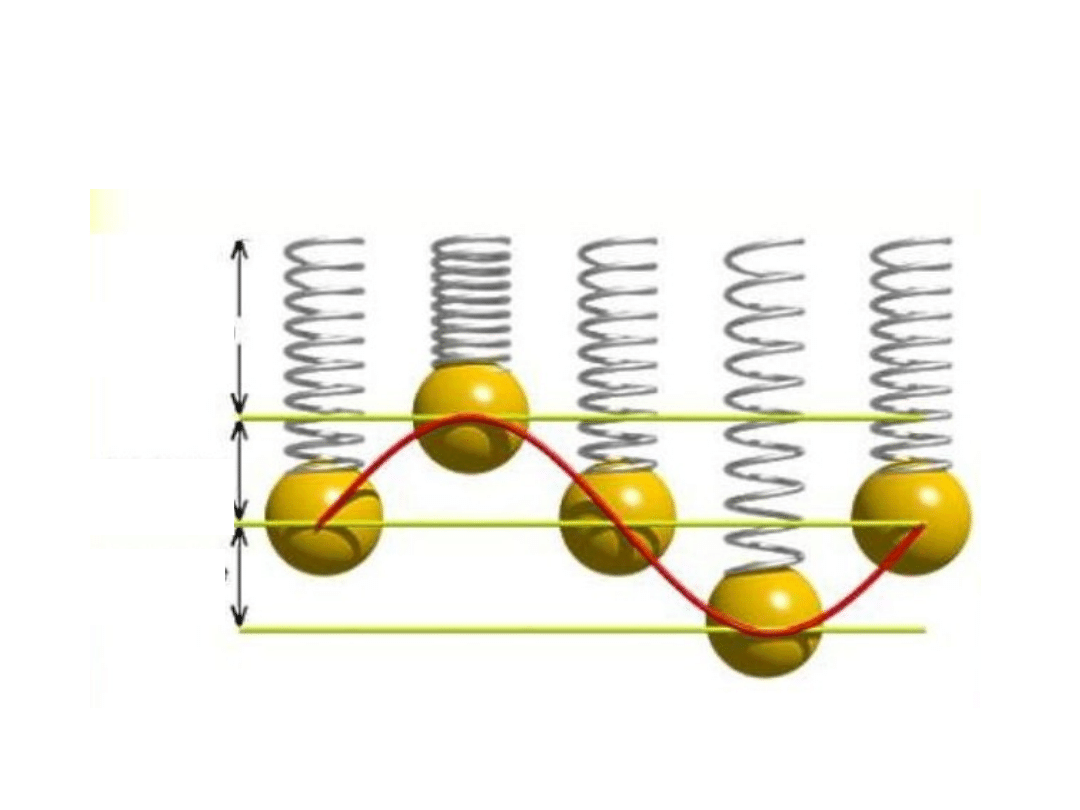
Ruch drgający - Oscylatory
x
y
z
l
mg
p
lsin
y
y
l
L
C
I
U
0
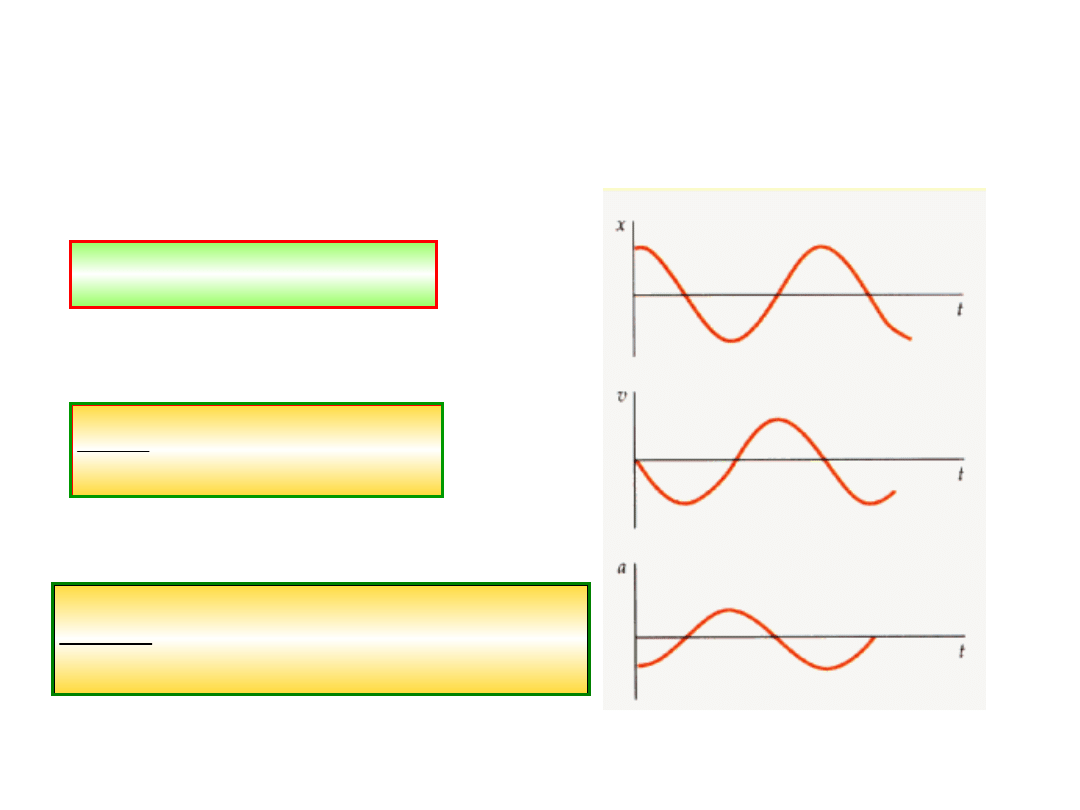
Opis matematyczny ruchu
harmonicznego.
)
cos(
)
(
0
t
A
t
x
Prędkość wynosi:
)
sin(
)
(
0
t
A
dt
t
dx
Przyśpieszenie wynosi:
x
t
A
dt
t
x
d
2
0
2
2
2
)
cos(
)
(
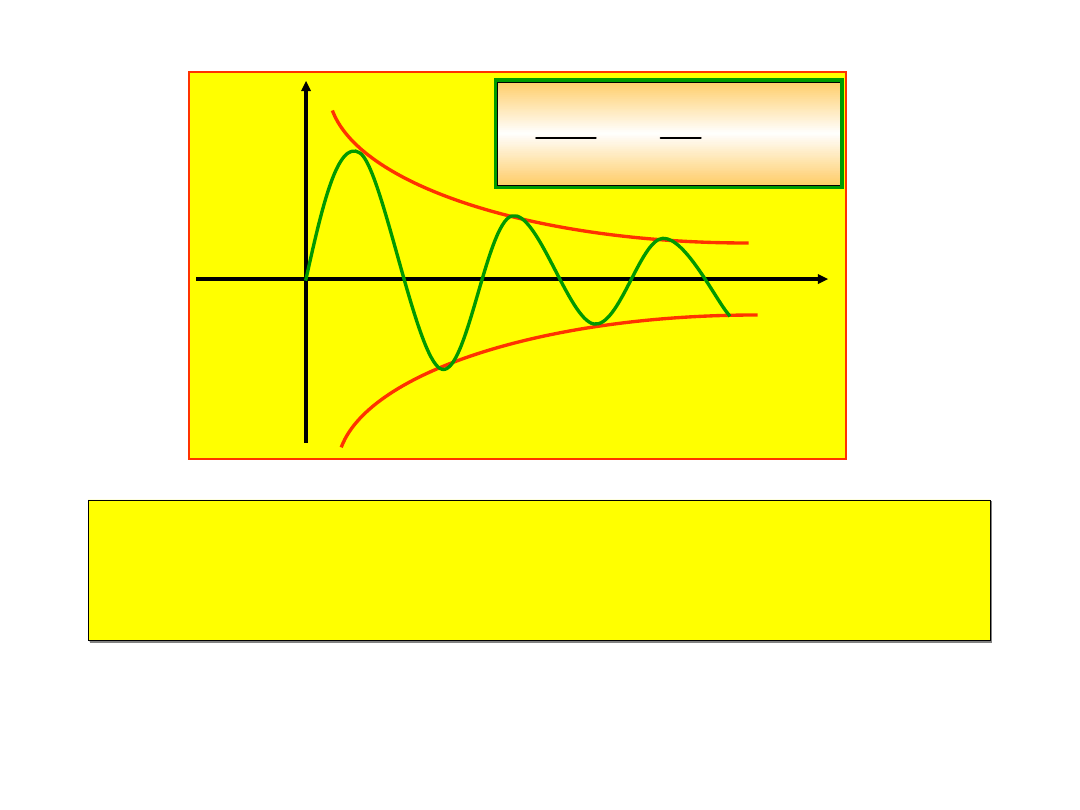
Oscylator harmoniczny
tłumiony
Jeżeli uwzględnimy oprócz siły napędzającej
oscylator harmoniczny również siły oporu np.
proporcjonalne do prędkości, to równanie
oscylatora przyjmuje postać;
2
2
0
d x
dx
m
Cx
dt
dt
Po wprowadzeniu oznaczeń
otrzymujemy równanie;
2
0
1
C
m
m
2
2
0
2
1
0
d x
dx
x
dt
dt
Rozwiązaniem jest funkcja
0
( )
sin
t
x t
x e
t
15.12.2008
Reinhard Kulessa
86
t
x(t)
Czas relaksacji jest to czas po którym
amplituda drgań maleje do 1/e wartości
początkowej.
Czas relaksacji jest to czas po którym
amplituda drgań maleje do 1/e wartości
początkowej.
2
2
0
d x
dx
m
Cx
dt
dt
15.12.2008
Reinhard Kulessa
87
Drgania wymuszone oscylatora
2
2
( )
d x
dx
m
Cx F t
dt
dt
2
2
0
2
1
( )
d x
dx
F t
x
dt
dt
m
0
0
sin
( )
sin
F
t
F t
t
m
m
.
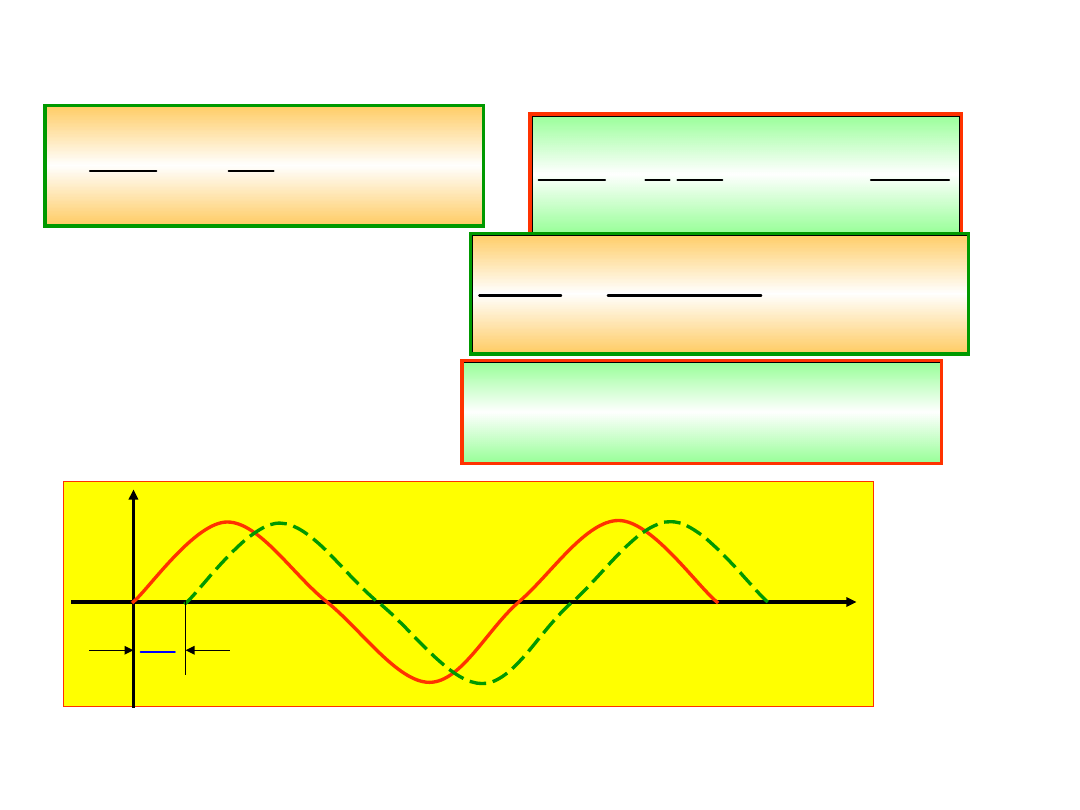
0
sin(
)
x x
t
F(t)
x(t)
ω
t
Jeśli siła zmienia się
sinusoidalnie
To rozwiązaniem będzie przebieg
Sinusoidalny. (zazwyczaj
przesuniety w fazie
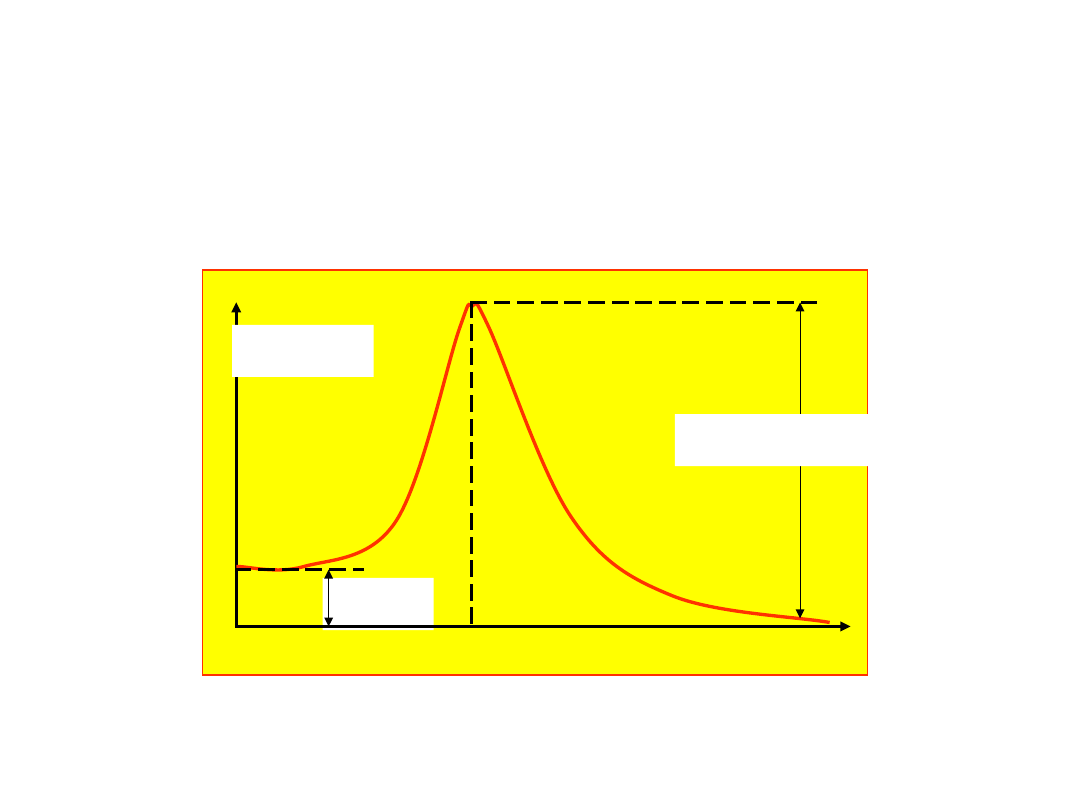
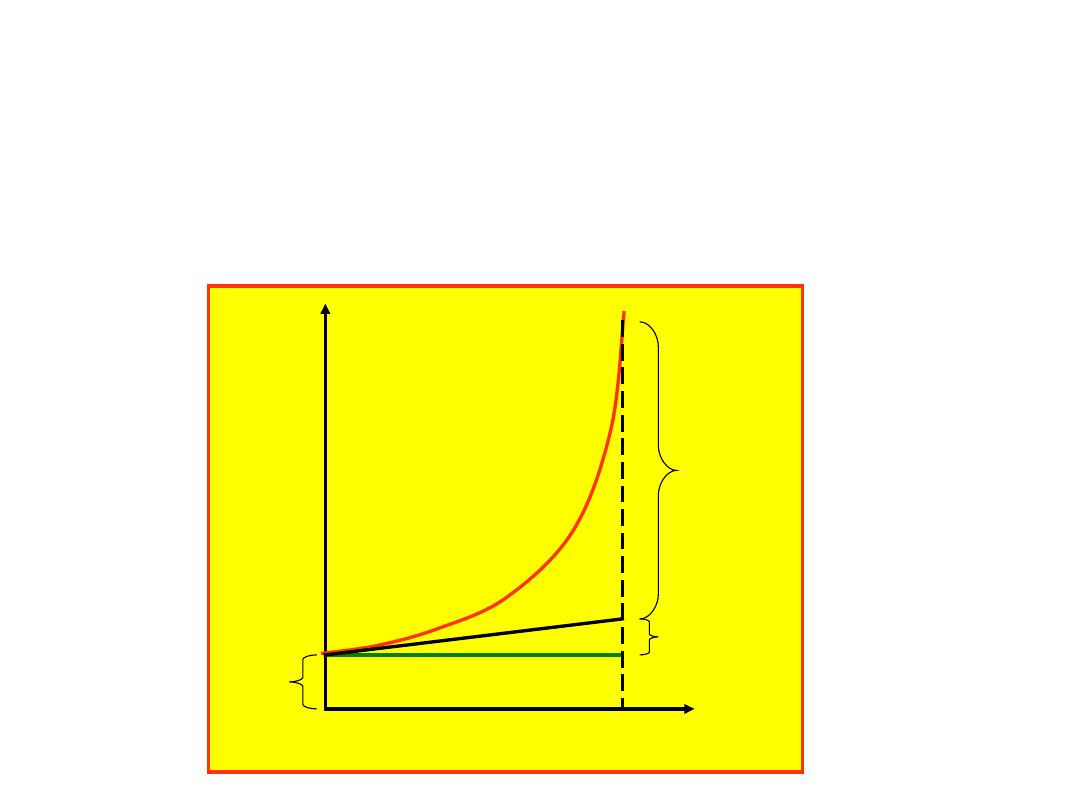
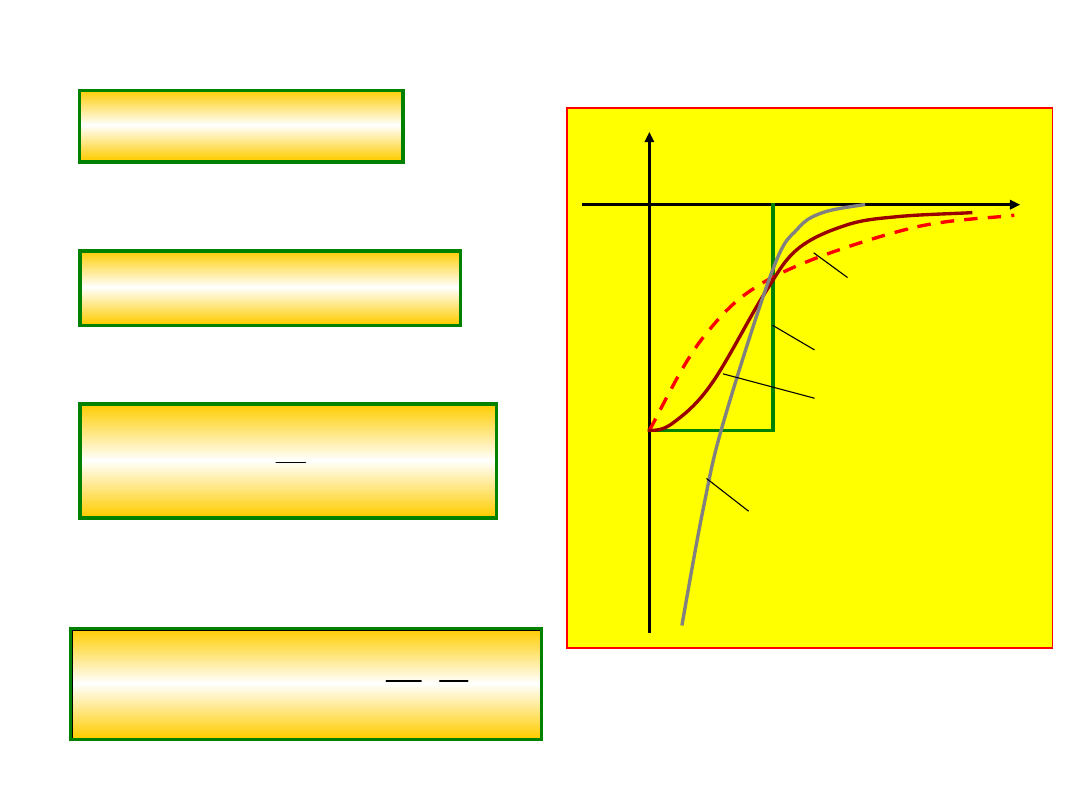
Zjawisko
rezonansu
Amplituda i częstość drgań wymuszonych
zależy od częstości siły wymuszającej.
Zależność tą pokazuje poniższy rysunek.
0
/
0
2
0
x
0
()
x
max
0
/
0
0
>>1
Dla częstości =
0
amplituda jest
maksymalna.
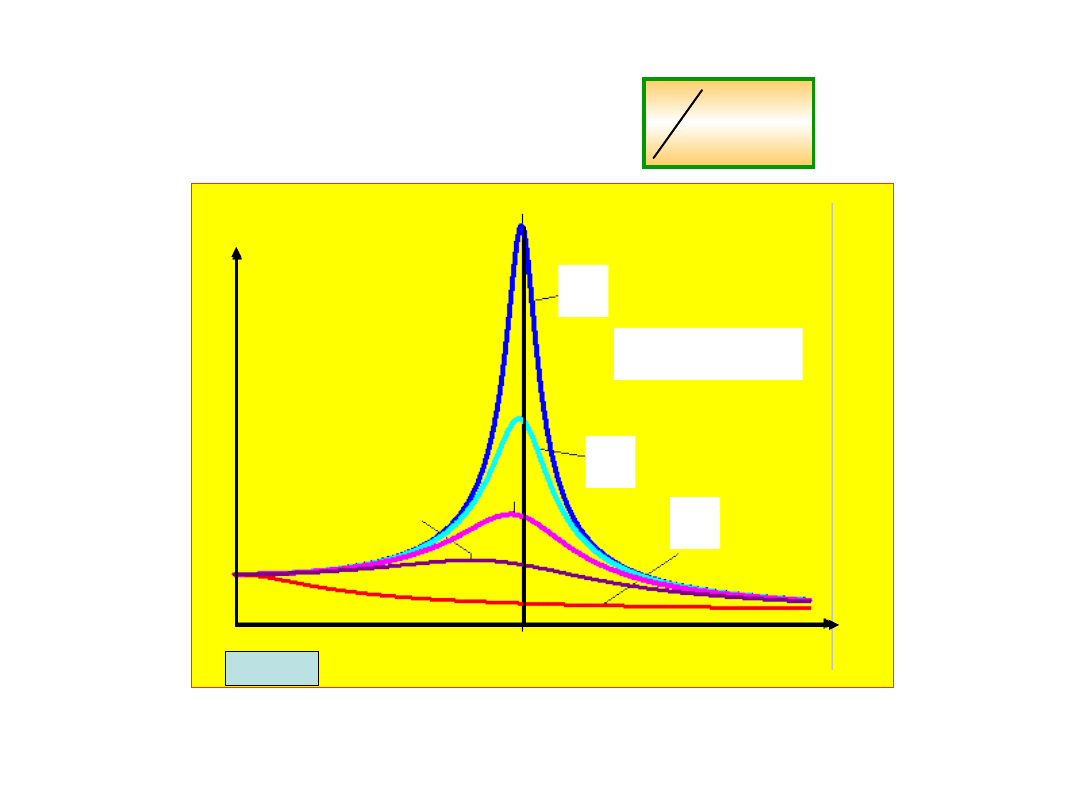
Zobaczmy w jaki sposób zmienia się krzywa
rezonansowa dla różnych parametrów
tłumienia
2
1
2
0
x
0
()
r
1
2
3
1
<
2
<
3
Fale –równanie
falowe
=
0
=
- A
2
2
2
2
2
v
t
x
r
1
r
2
13-01-2009
Reinhard Kulessa
91
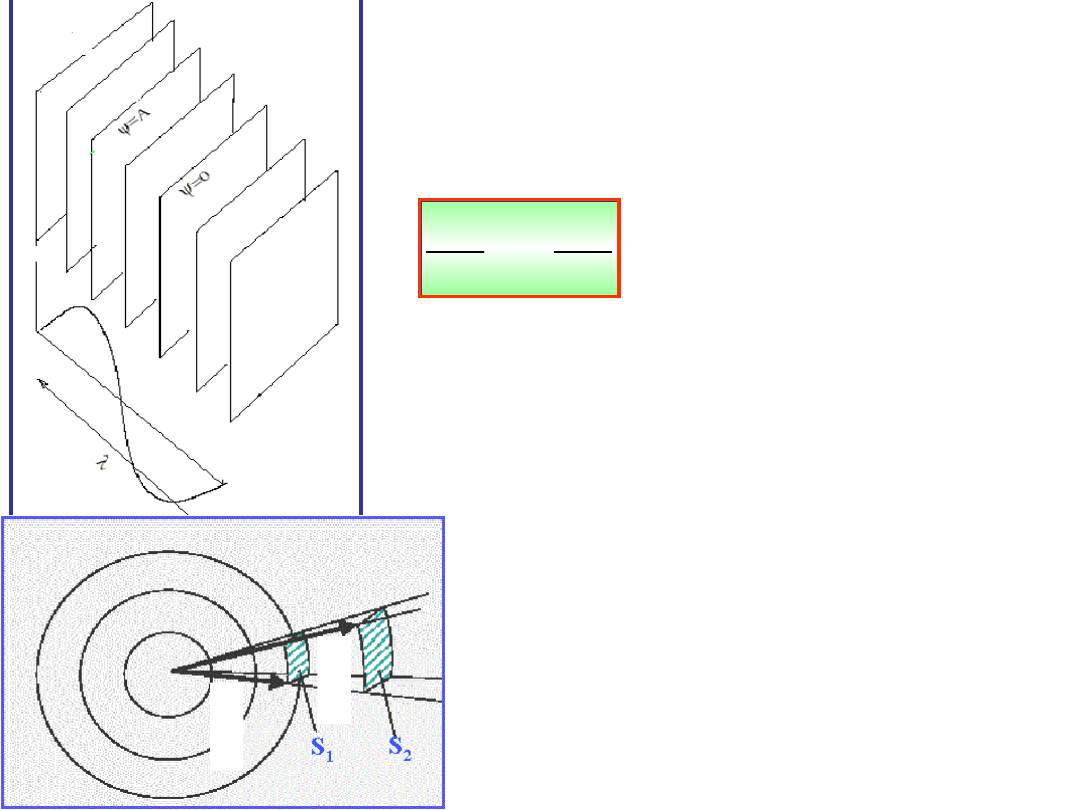
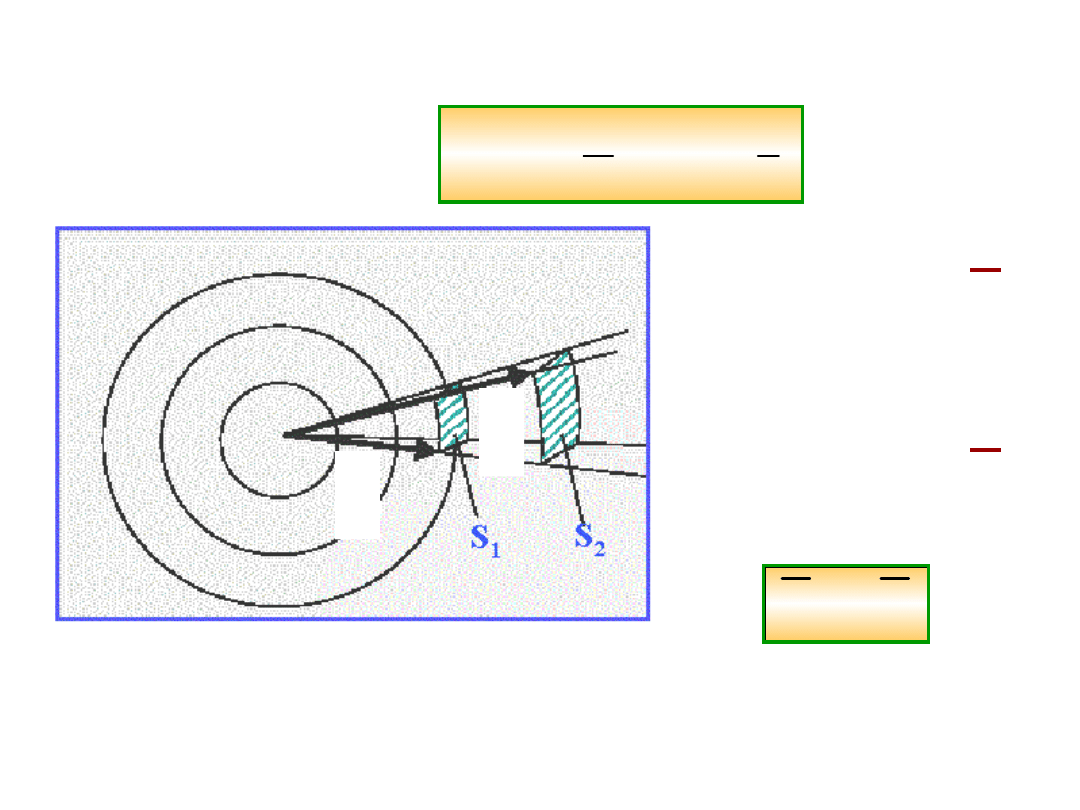
Wróćmy do problemu rozchodzenia się fal
kulistych.
r
1
r
2
Rozpatrzmy falę:
( , )
sin (
)
A
r
r t
t
r
v
Średnia gęstość
strumienia mocy
fali
P
1
przechodzącej
przez
powierzchnię
S
1
jest w ośrodku bez
absorbcji równa
średniej gęstości
strumienia mocy
fali
P
2
przechodzącej
przez
powierzchnię
S
2
.
Czyli
1
2
P
P
.
Natężenie fali spada więc z rosnącą
odległością r.
Elektryczność. Fale
Elektryczność.
Podstawowe pomiary
elektryczne
Układ RLC,

http://www.edw.com.pl/ea/wstep.ht
ml
podstawowe definicje:
1.Amper, Wolt
2.Opór, pojemnośc, indukcyjnośc
3.Prawo Ohma, Prawa Kirhoffa
4.Prawa Nortona i Thevenina
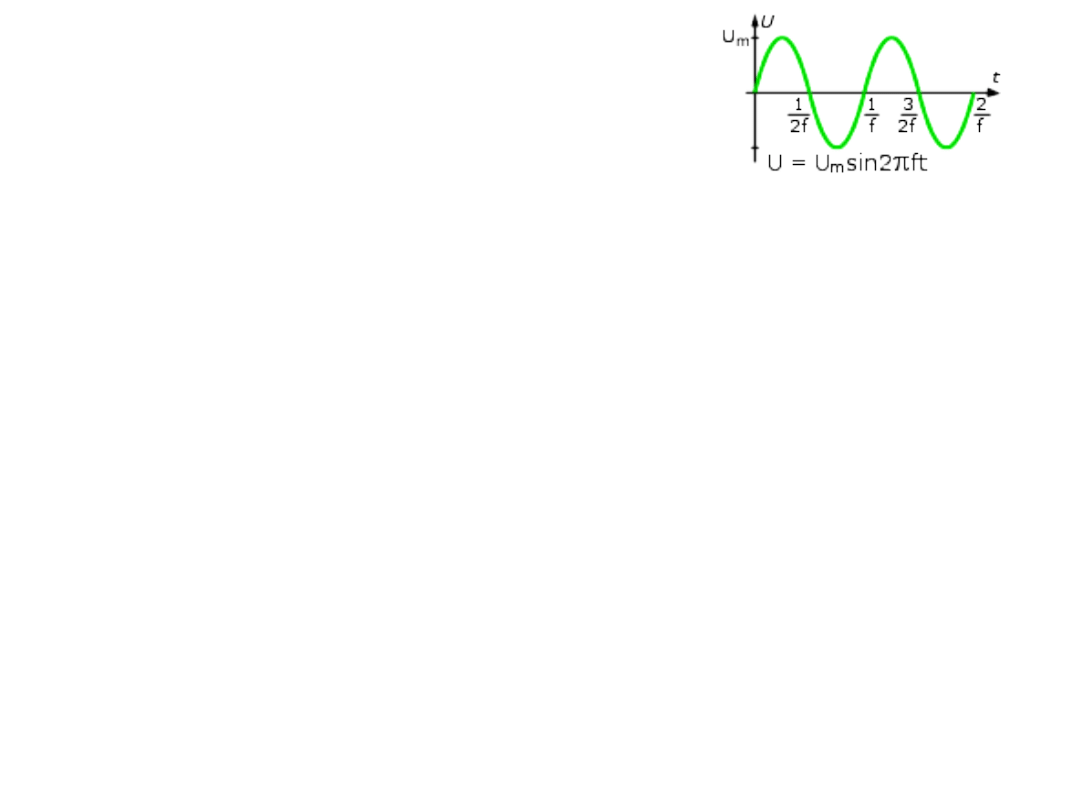
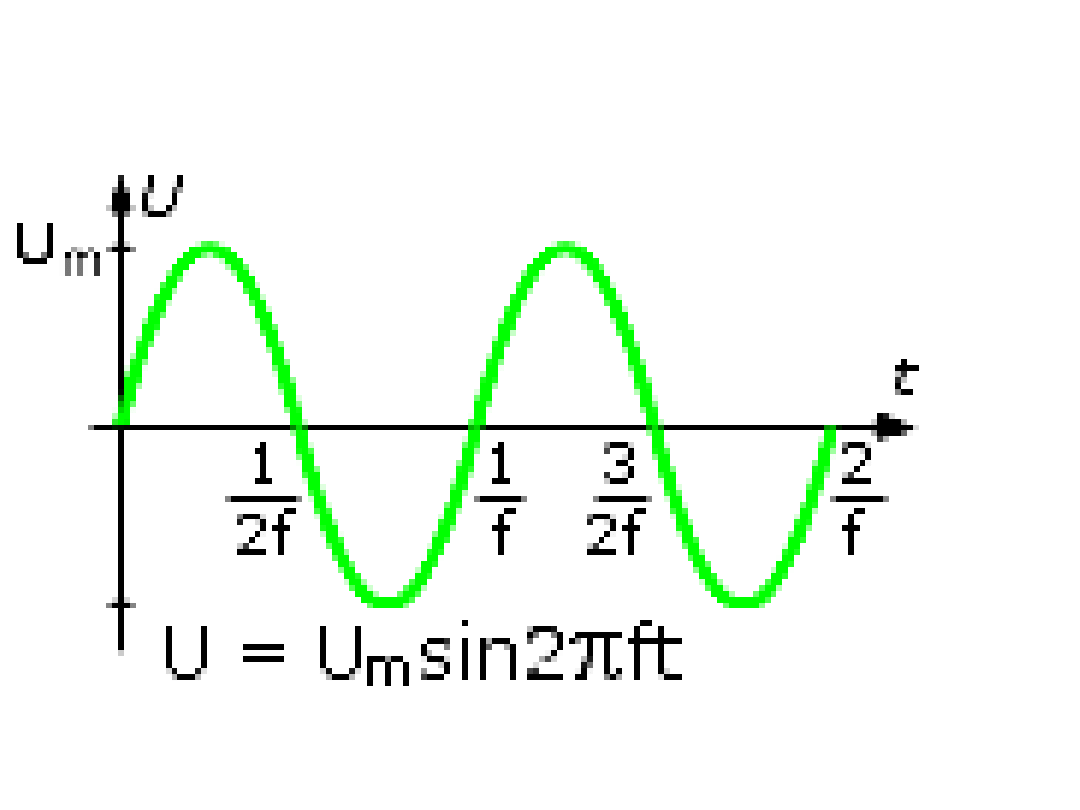
Sygnał sinusoidalny U(t) = Umsin( ω t),
gdzie:
Um - amplituda,
ω=2πf,
f - częstotliwość wyrażona w hercach (Hz),
t - czas w sekundach.
Falę sinusoidalną opisują dwa parametry amplituda
i częstotliwość (dotyczy to również innych sygnałów).
Czasami zamiast amplitudy używa się pojęcia wartości
skutecznej Usk czy też wartości międzyszczytowej Upp.
Wartość skuteczna jest równa Usk=0,707*Um,
wartość międzyszczytowa jest równa Upp=2Um.
Przykładem wartości skutecznej sygnału sinusoidalnego
może być znana wszystkim wartość 230V napięcia
o częstotliwości 50Hz w gnieździe sieciowym, jakie
znajduje się w każdym mieszkaniu. Amplituda tego
napięcia wynosi 325V, a wartość międzyszczytowa 650V.
Przebieg napięcia w
sieci
+325V
-
325
V
10ms
10ms
10ms
10
ms
---------------20ms
--------------
230V
(220V)
Oporność
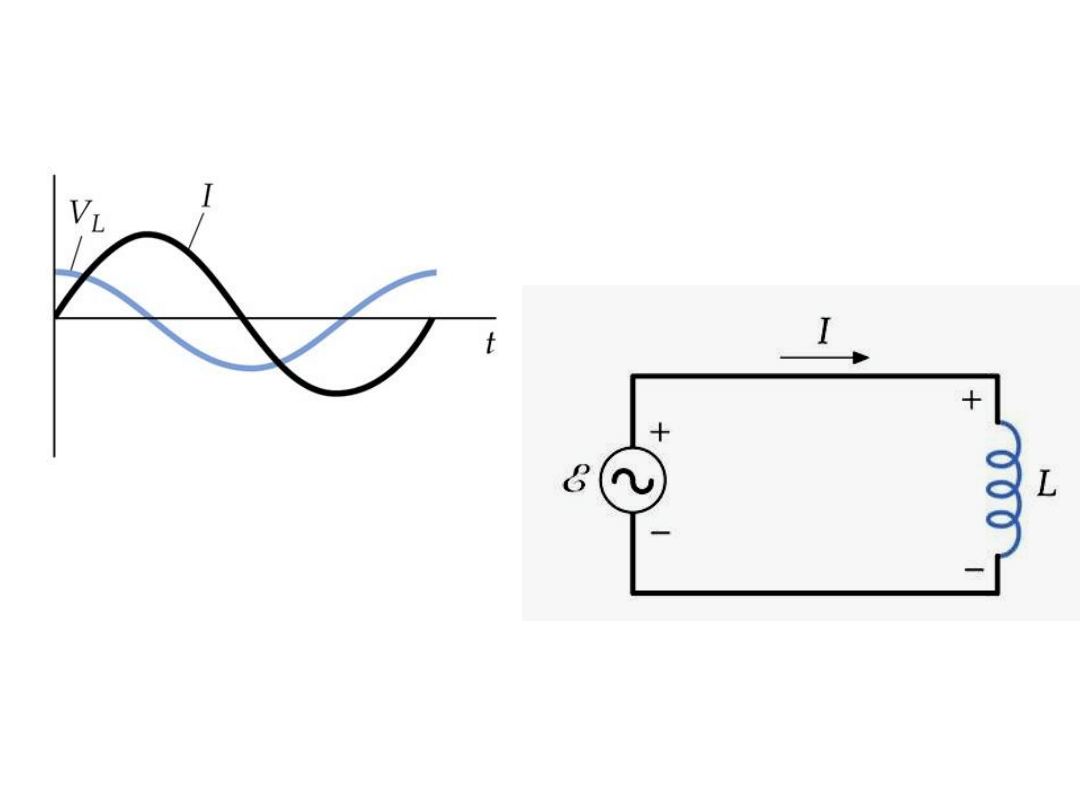
Indukcyjność
i(t) = u(t) : jωL
i(t) =
I
cos(ωt – φ)
Napięcie wyprzedza prąd o ¼ T
czyli o π/2
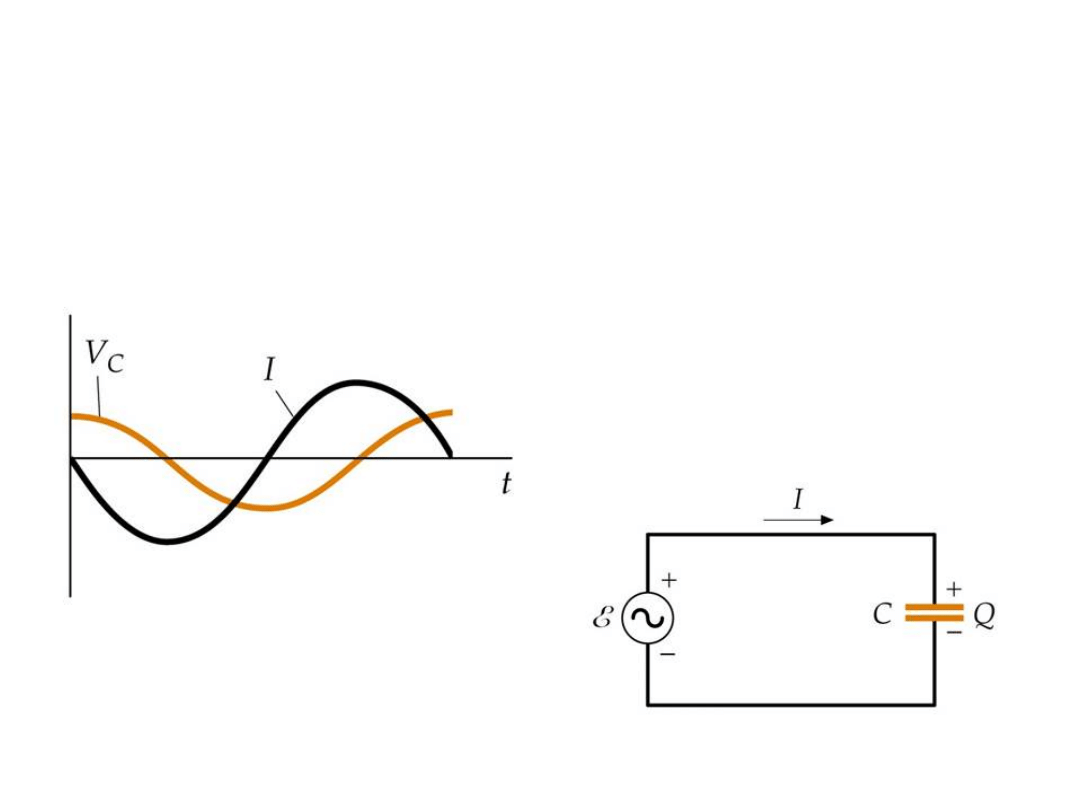
POJEMNOŚĆ
i(t) = u(t) jωC i(t) = I cos(ωt + φ)
Prąd wyprzedza napięcie o ¼ T czyli o π/2
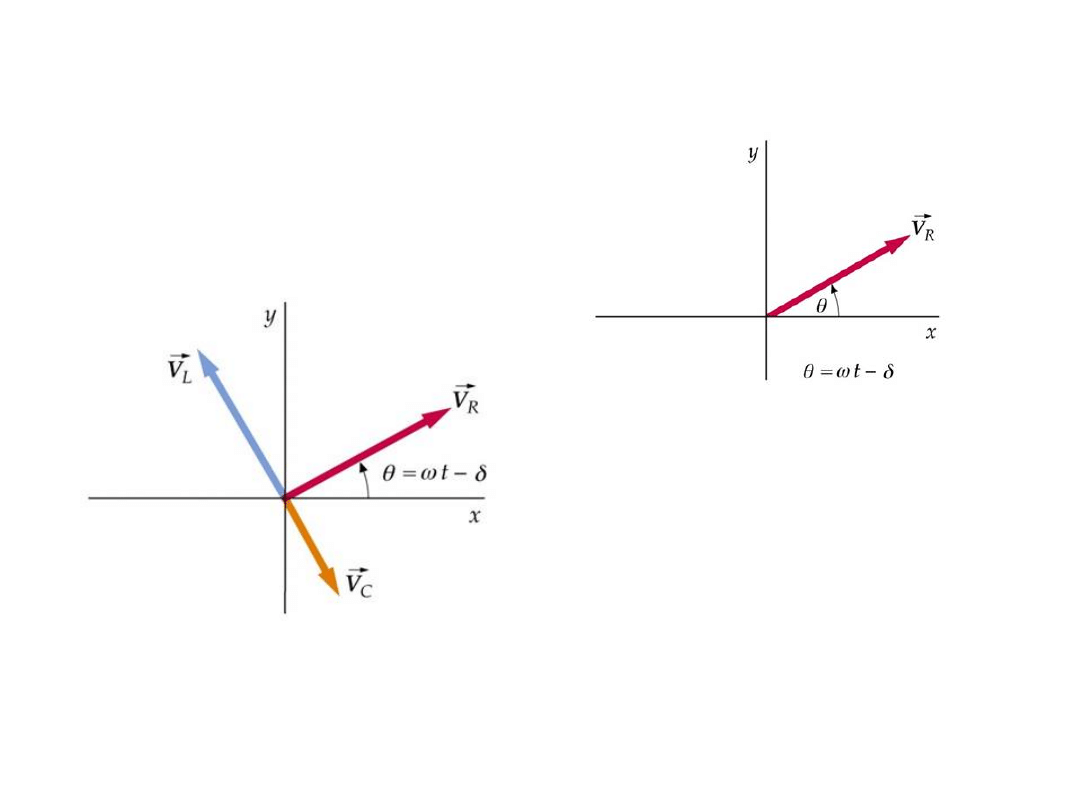
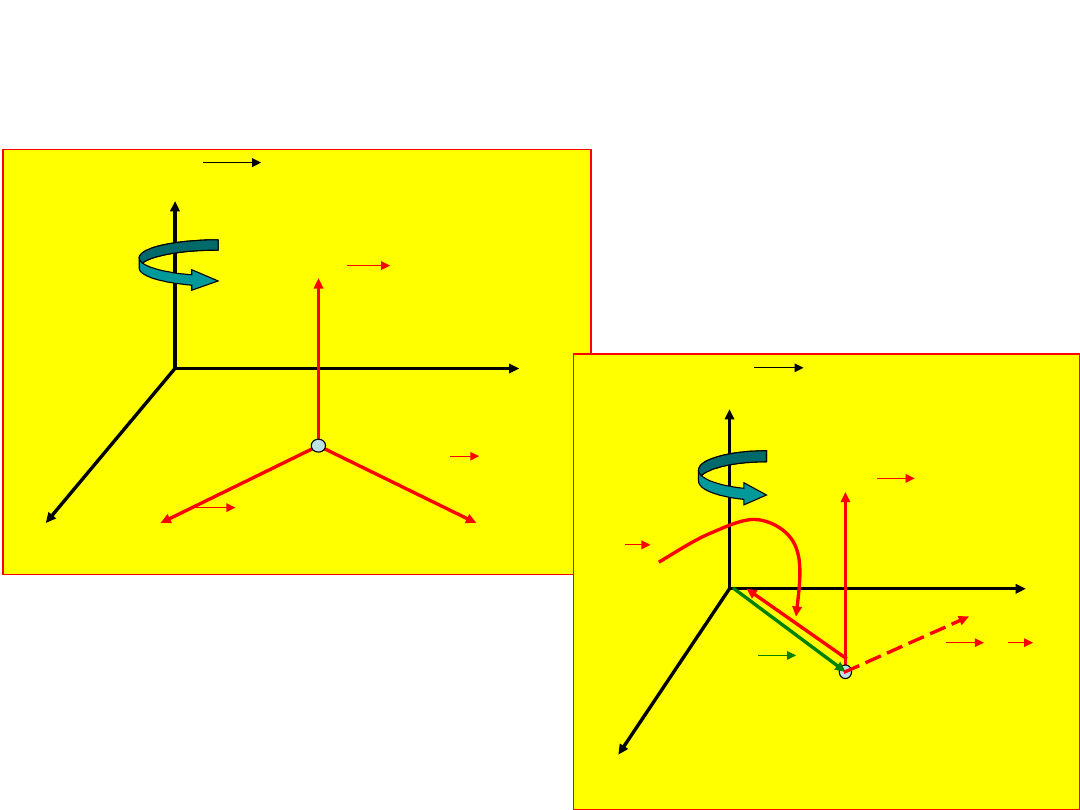
WSKAZY i wskazy
wiruj
ą
ce
Napięcie na indukcyjności wyprzedza napięcie
na pojemności o π/2.
Wskaz napięcia jest przesunięty o kąt θ w
stosunku do fazy prądu, którą zazwyczaj przyj-
mujemy za zerową
Można tak kombinować jeżeli pominiemy
zmiany czasowe, (sinusoidalne) co jest
Interpretowane jako wiowanie wskazów.
Aby nie dostać oczopląsu wirowanie pomujamy
To dla Orłów
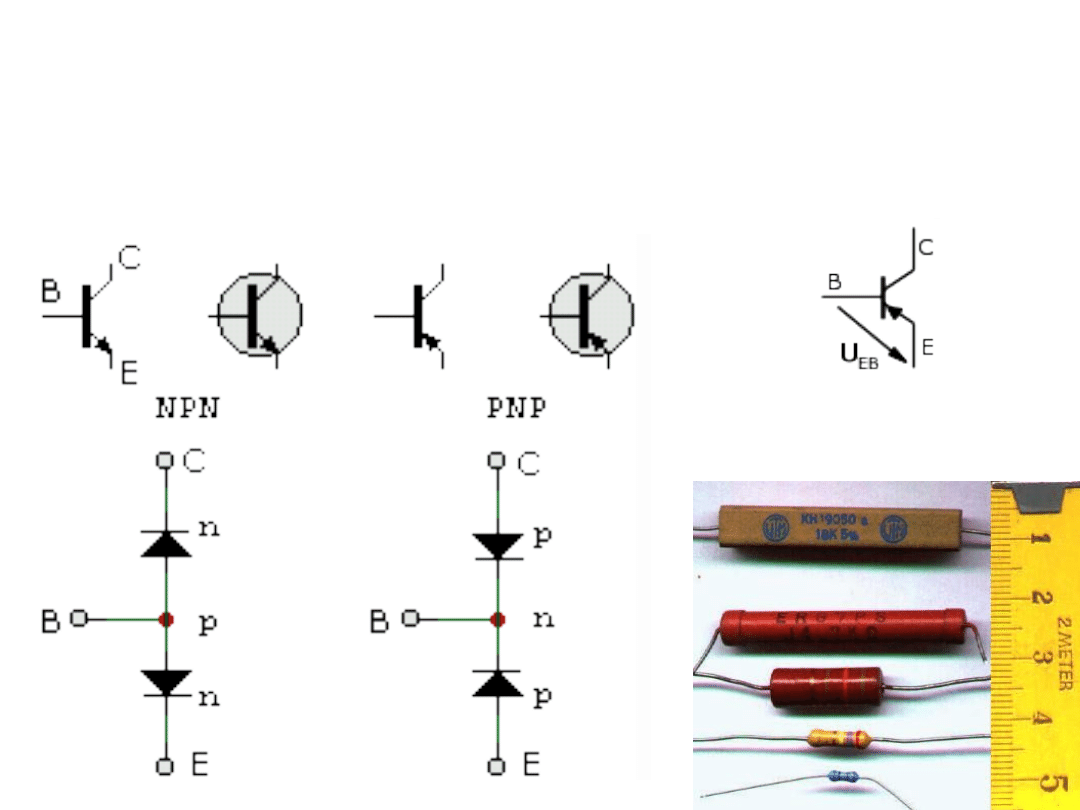
ELEMENTY AKTYWNE i
PASYWNE my uczymy si
ę
RLC
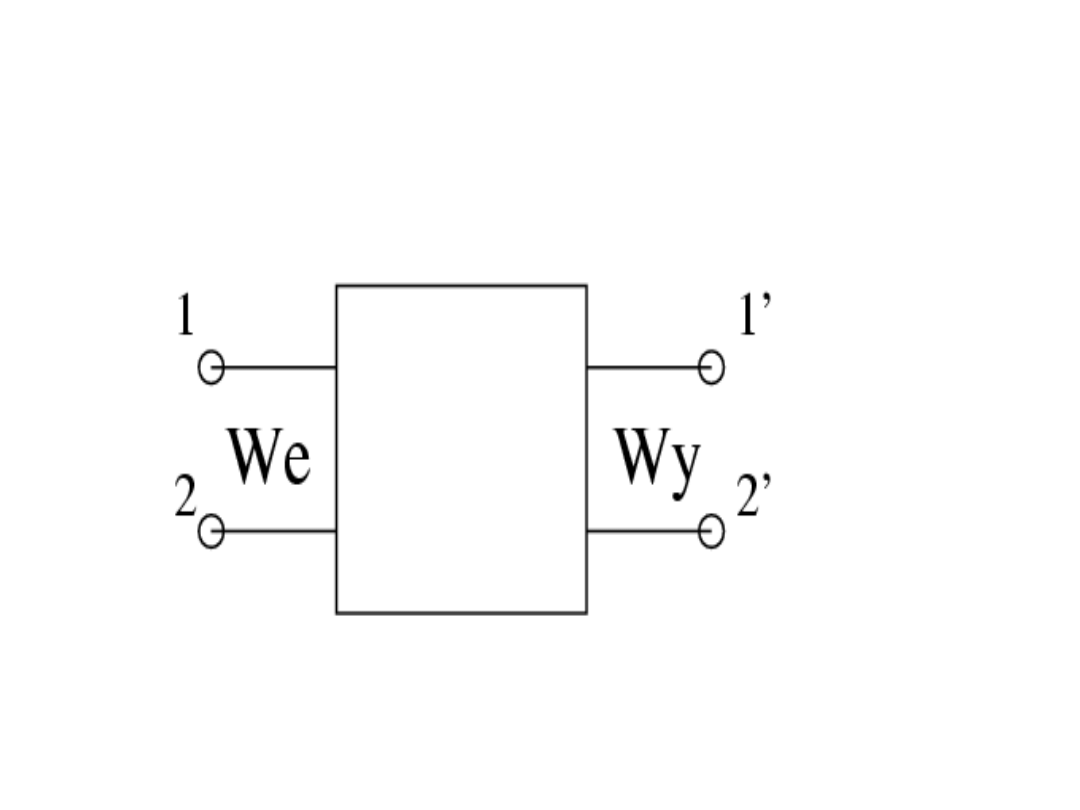
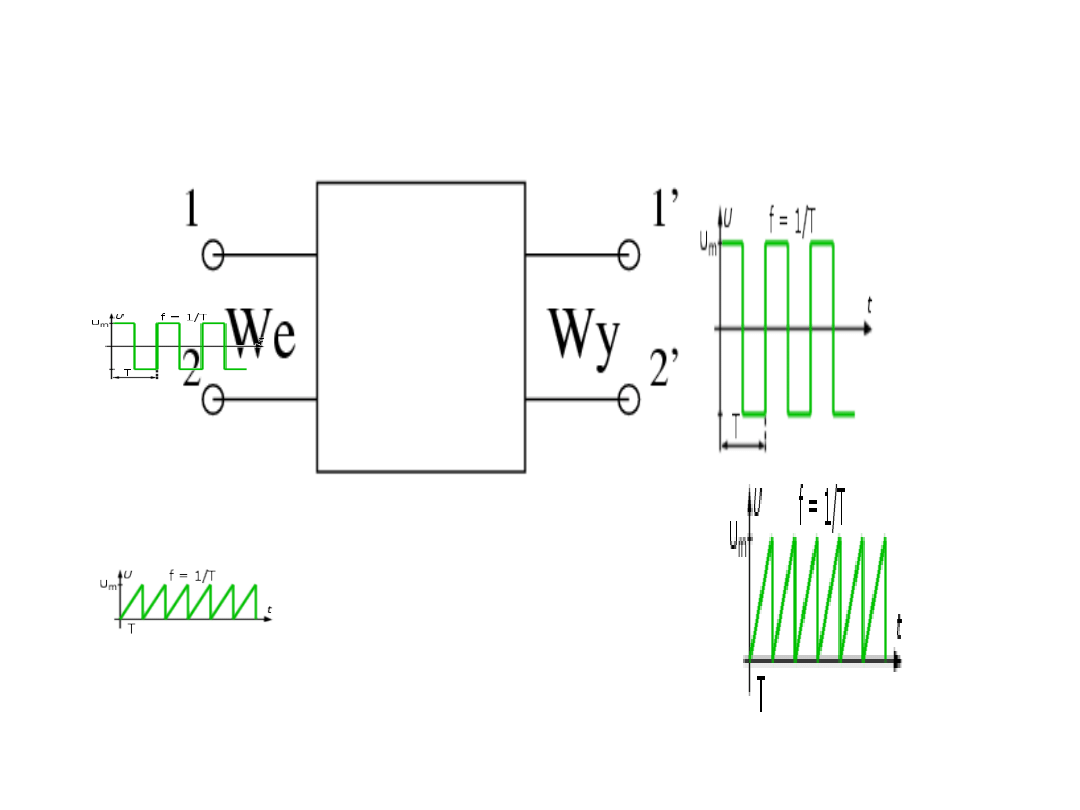
CZWÓRNIK DWÓNIK
CZARNA SKRZYNKA
K(jω)
U
1
(t
)
U
2
(
t)
To pojęcie z cybernetyki dotyczy nie tylko układów elektronicznych. Jeżeli np. „na wejściu”
wzrośnie akcyza na paliwo to na wyjściu spadną obroty firm i dochody z podatków a potem
upadnie Rząd.
CZWÓRNIK DWÓNIK
CZARNA SKRZYNKA
K(jω)
U
1
(t)
U
2
(t)
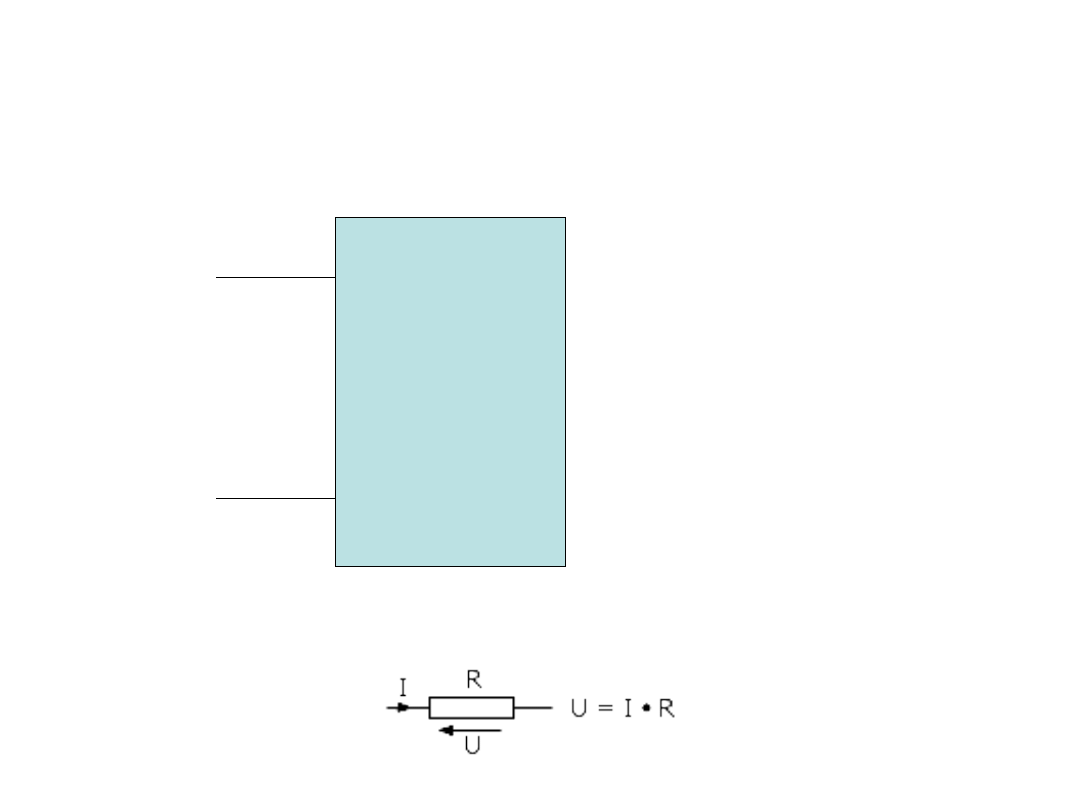
DWÓJNIK
i(t)
u(t)
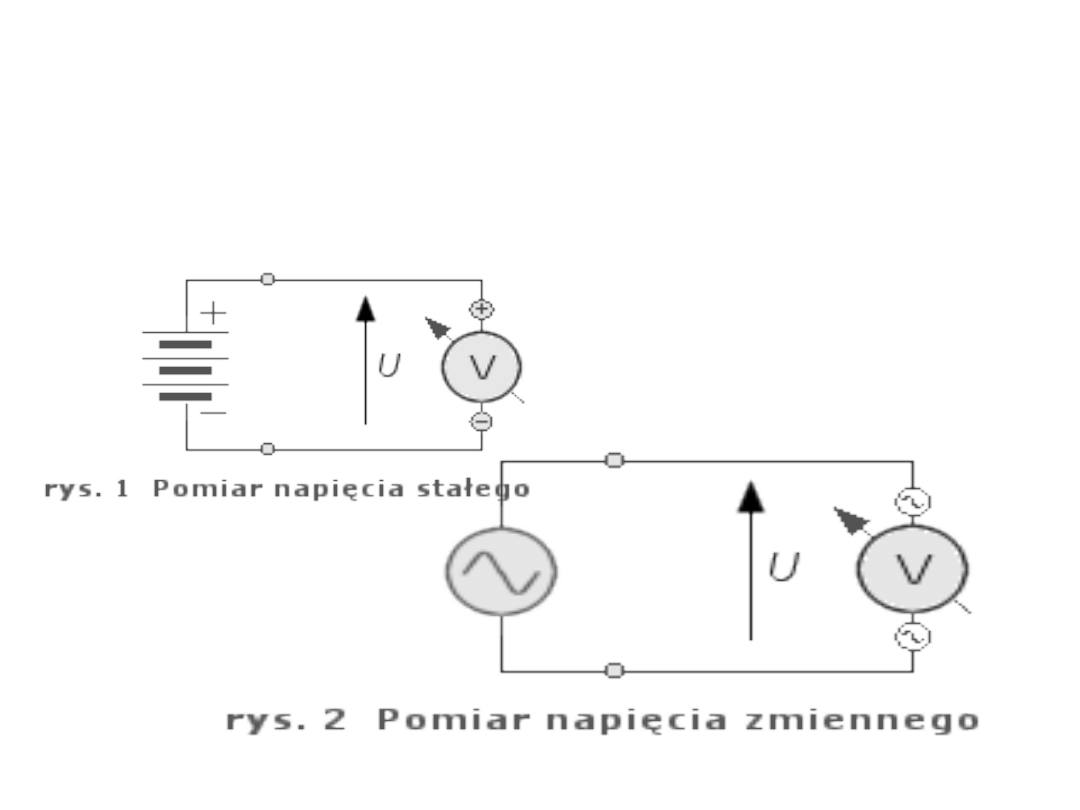
Pomiar Napięcia
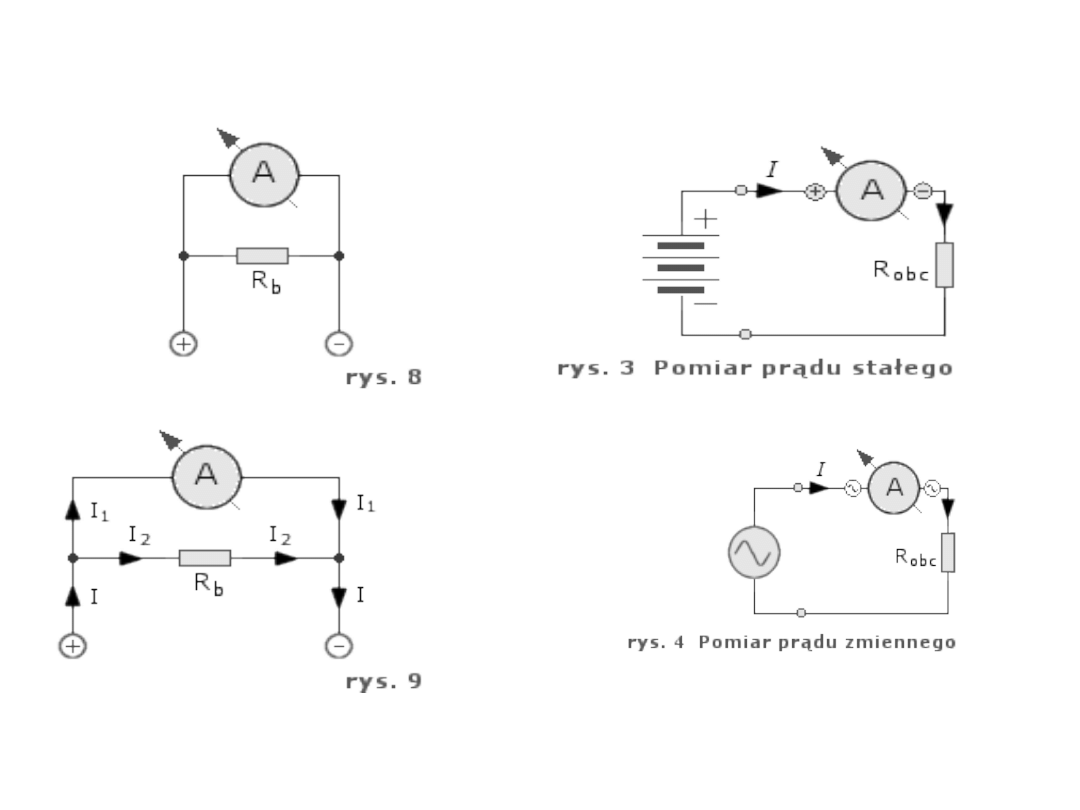
Pomiar prądu
Zastosowanie „bocznika” zwieksza
Zakres amperomierza
Wstawienie amperomierza zwiększ
opór
w obwodzie i miernik wskazuje
mniejszy prąd
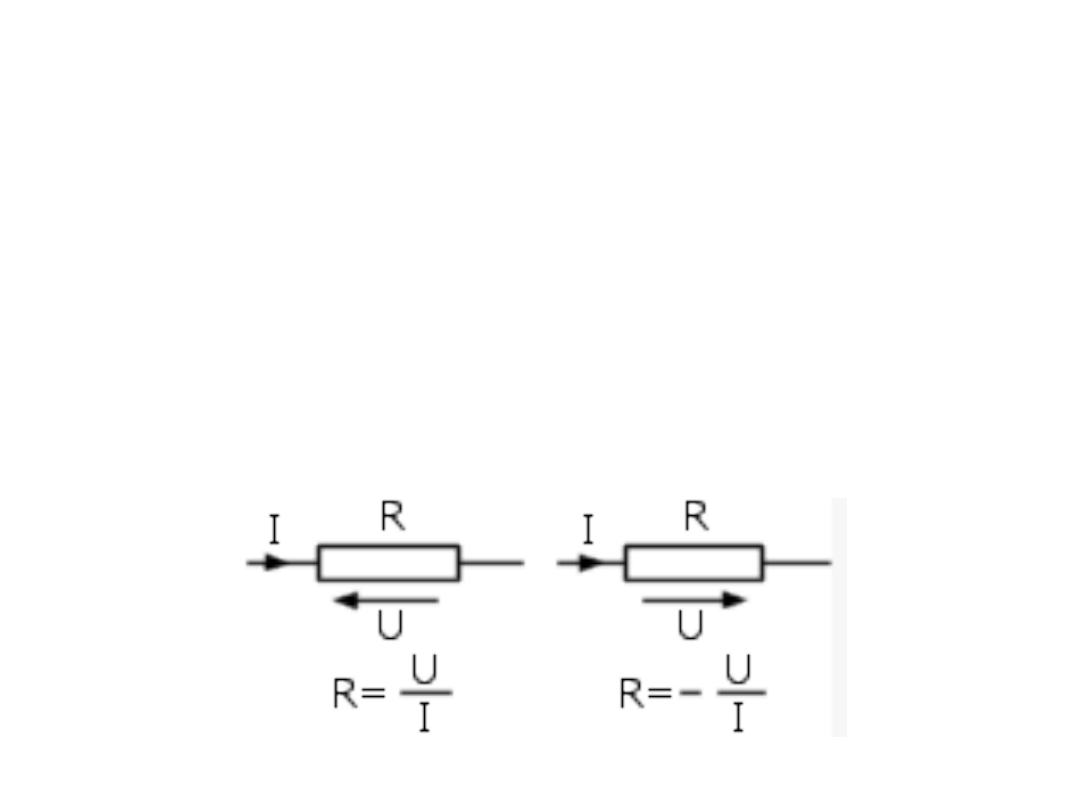
Prąd, opór, Prawo
Ohma
Prąd wyraża szybkość przepływu ładunku elektrycznego obok
pewnego punktu. Jednostką miary jest 1A (amper). Można więc
powiedzieć, że prąd jednego ampera jest równy przepływowi ładunku
jednego kulomba na sekundę
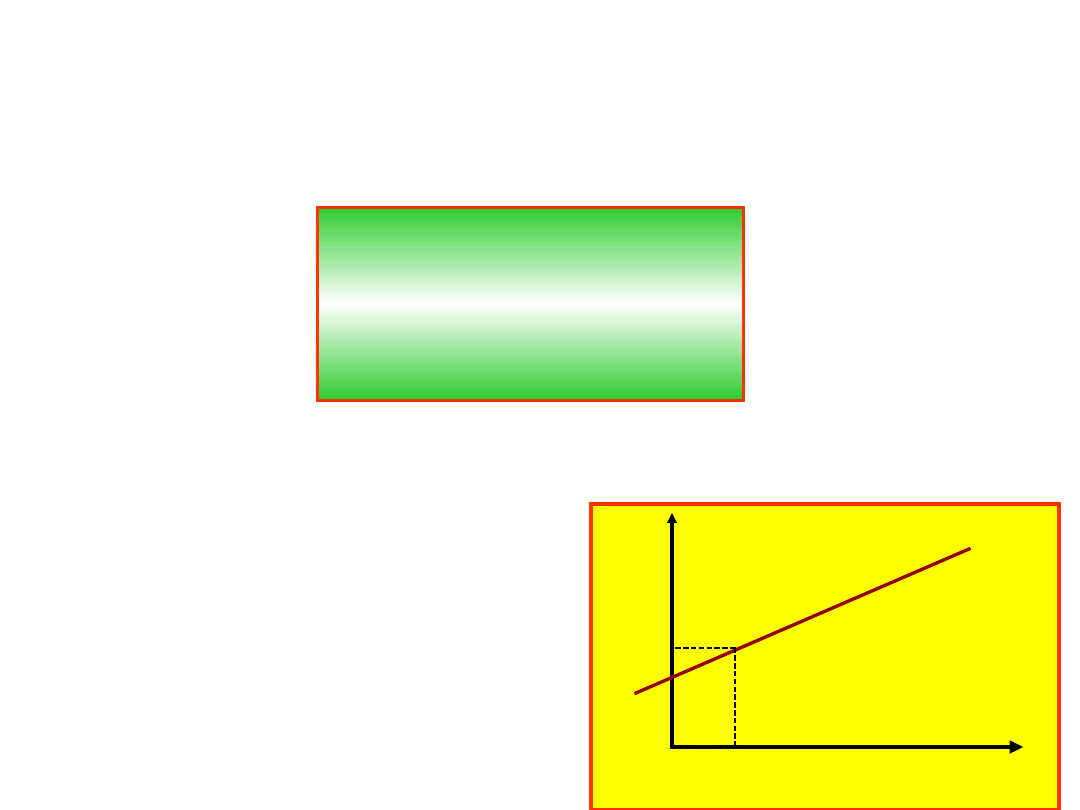
Nie do końca wiadomo czy napięcie
zależy od prądu czy prąd od napięcia
ale zakładamy zależność liniową
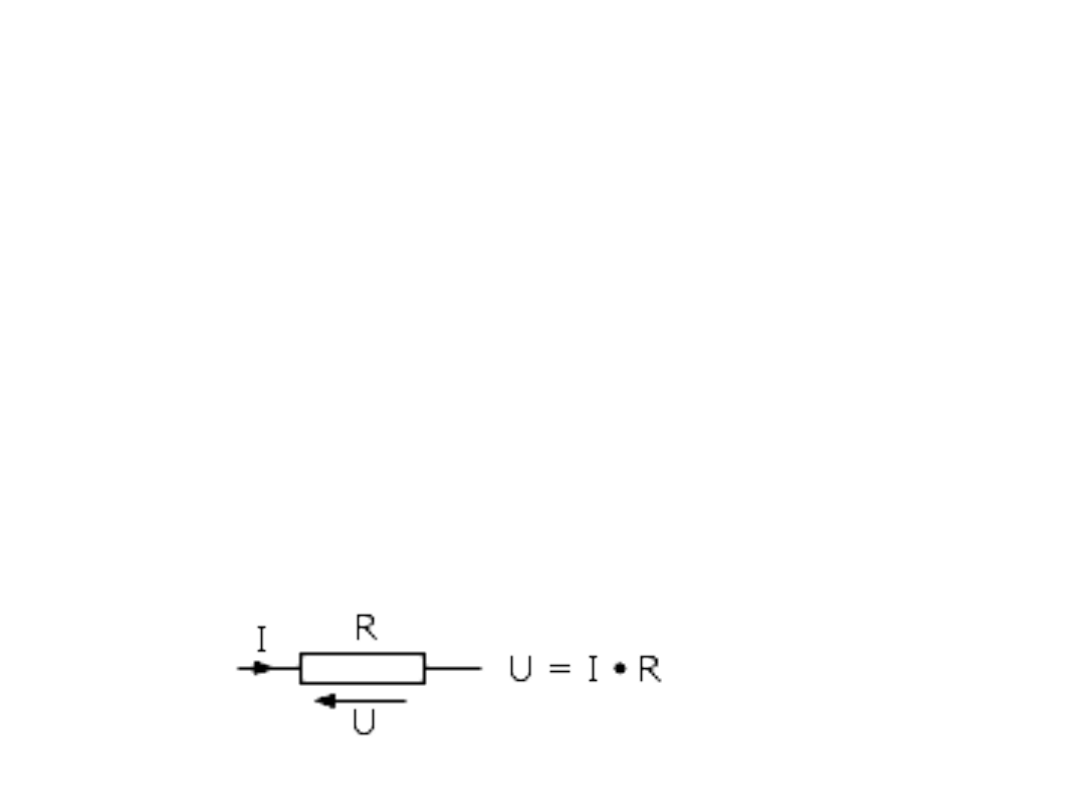
Prawo Ohma mówi, że napięcie U na końcach przewodnika, przez
który płynie prąd o natężeniu I jest iloczynem natężenia prądu
i rezystancji R tego przewodnika, czyli U = I
*
R Jest to prawo,
z którego będziesz wielokrotnie korzystał, gdy będziesz musiał
obliczyć prąd lub napięcie czy też wyliczyć właściwą dla danego
układu wartość rezystora.
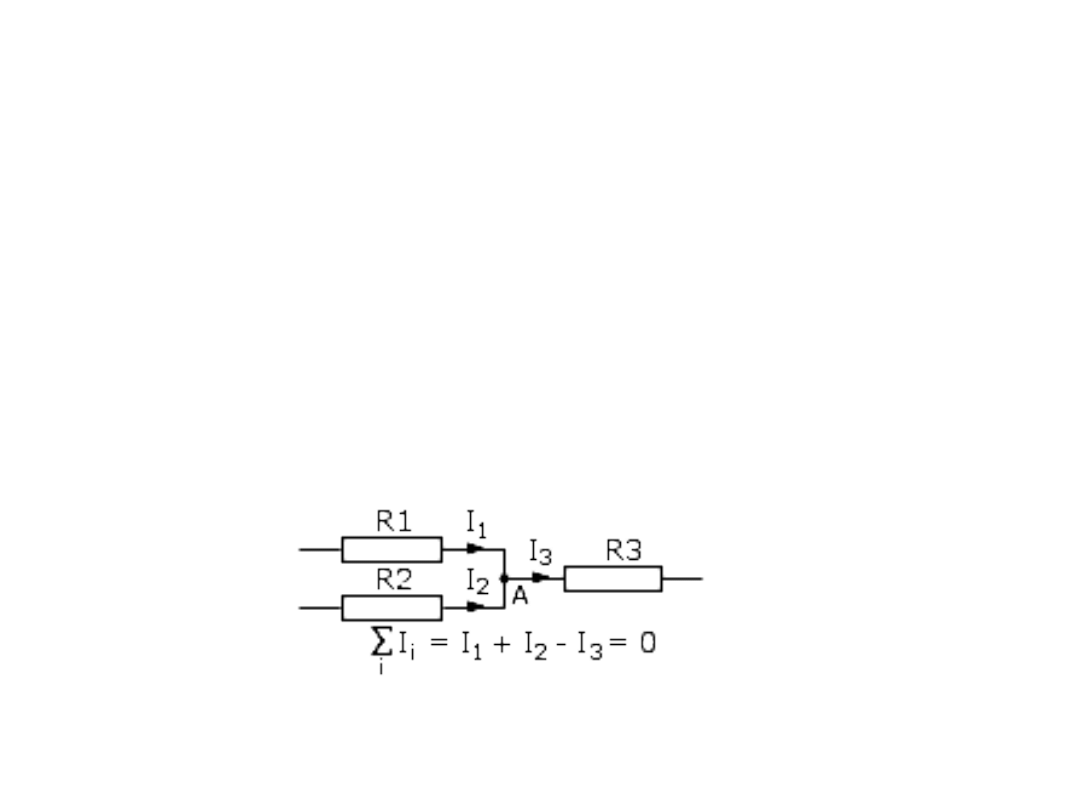
Prawa Kirchoffa
Pierwsze prawo Kirchhoffa mówi, że suma prądów wpływających
do węzła jest równa sumie prądów wypływających z niego lub
inaczej, że suma wszystkich prądów w węźle jest równa zeru
Prądy wpływające do węzła mają znak dodatni, a wypływające
znak ujemny.
Przykładem węzła jest punkt A na rysunku. Prądy I1, I2 są
dodatnie, a I3 ujemny.
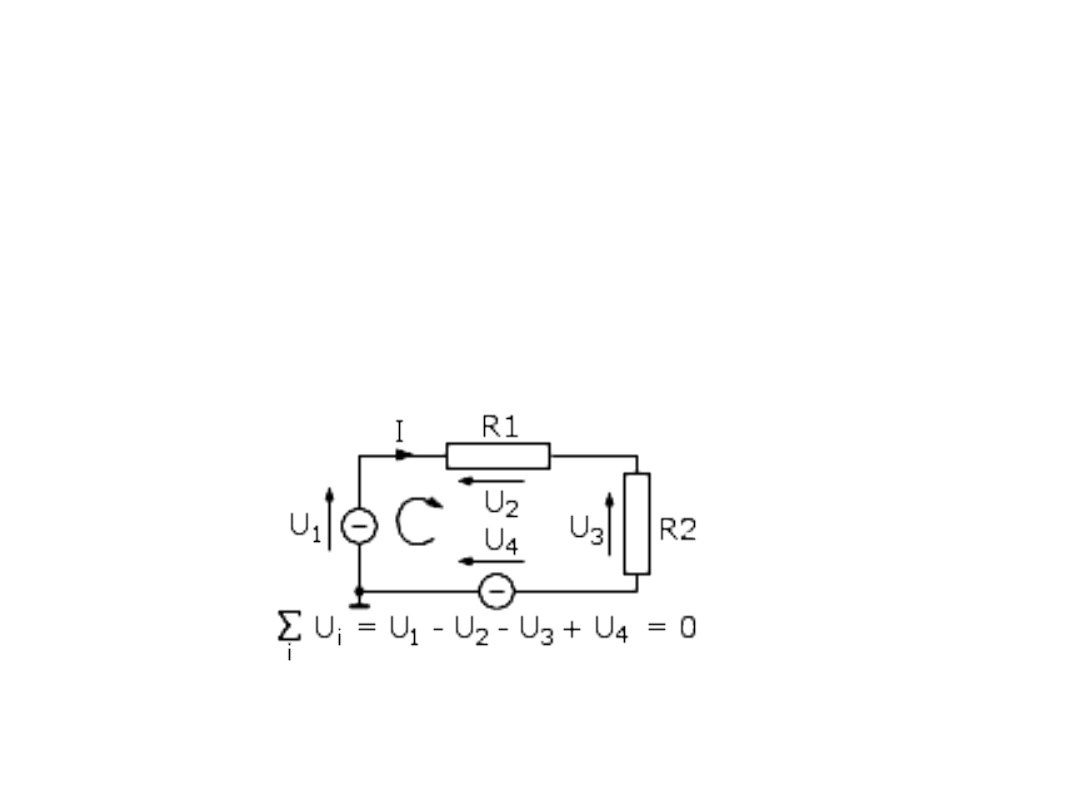
Drugie prawo Kirchhoffa mówi, że w obwodzie zamkniętym
(oczku) suma wszystkich napięć jest równa zeru
Napięcia, których zwrot strzałki jest zgodny z obiegiem oczka są
dodatnie, a te, których zwrot jest przeciwny są ujemne. Obieg oczka
przyjmuje się zgodnie z zaznaczoną okrągłą strzałką wewnątrz
obwodu.
Zgodnie z tymi założeniami napięcia U1 i U4 są dodatnie, a U2
i U3 ujemne.
Mierniki
magnetyczne
zawsze mierzą tak
na prawdę prąd
A mierniki cyfrowe ????
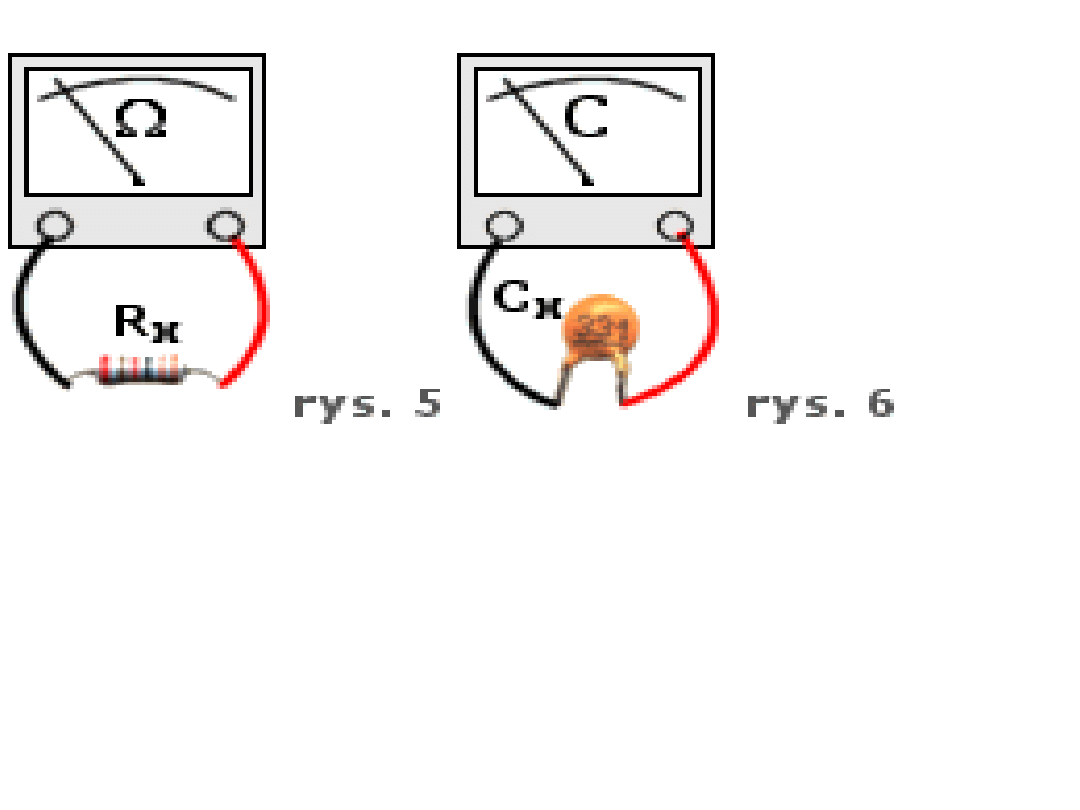
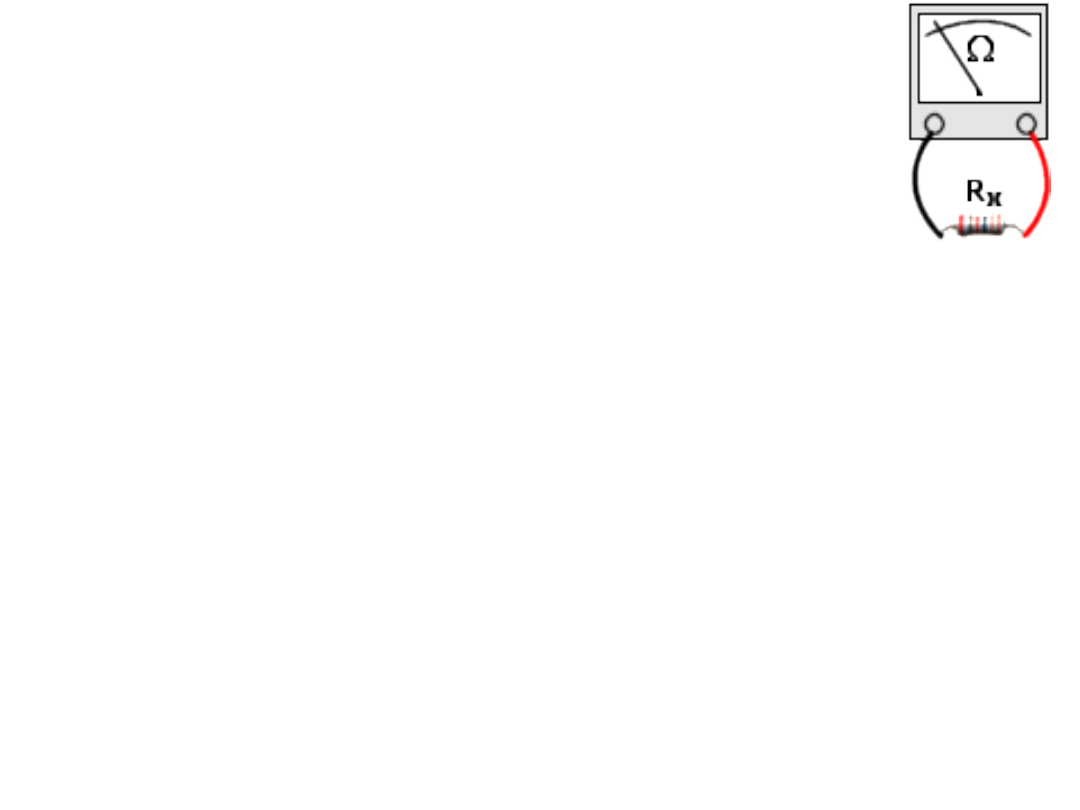
Pomiar rezystancji - R - tą wielkość mierzymy omomierzem.
Pomiaru dokonujemy bezpośrednio na elemencie (rezystorze) -
pamiętać należy, że pomiar rezystora wlutowanego w płytkę razem z
innymi elementami może dawać wskazania odbiegające od
faktycznej wartości (rys. 5).
Pomiar pojemności - C - tą wielkość mierzymy miernikiem
pojemności. Pomiaru dokonujemy bezpośrednio na elemencie -
kondensatorze (rys. 6)
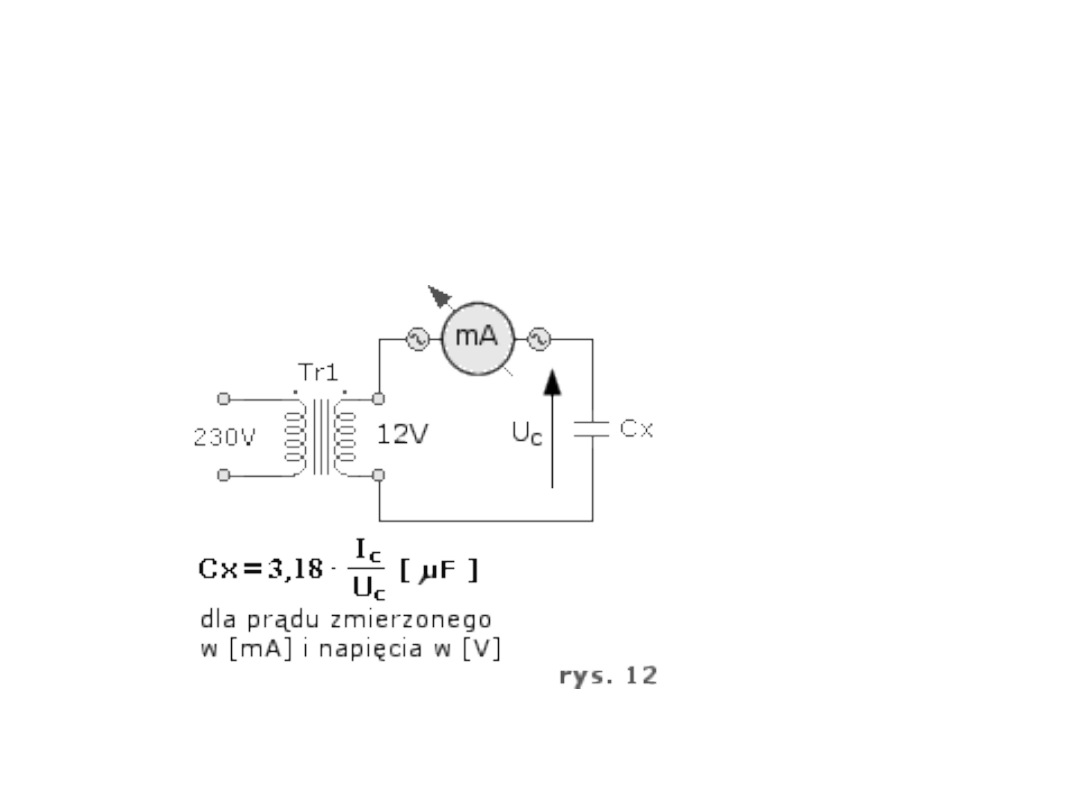
Pomiar pojemności
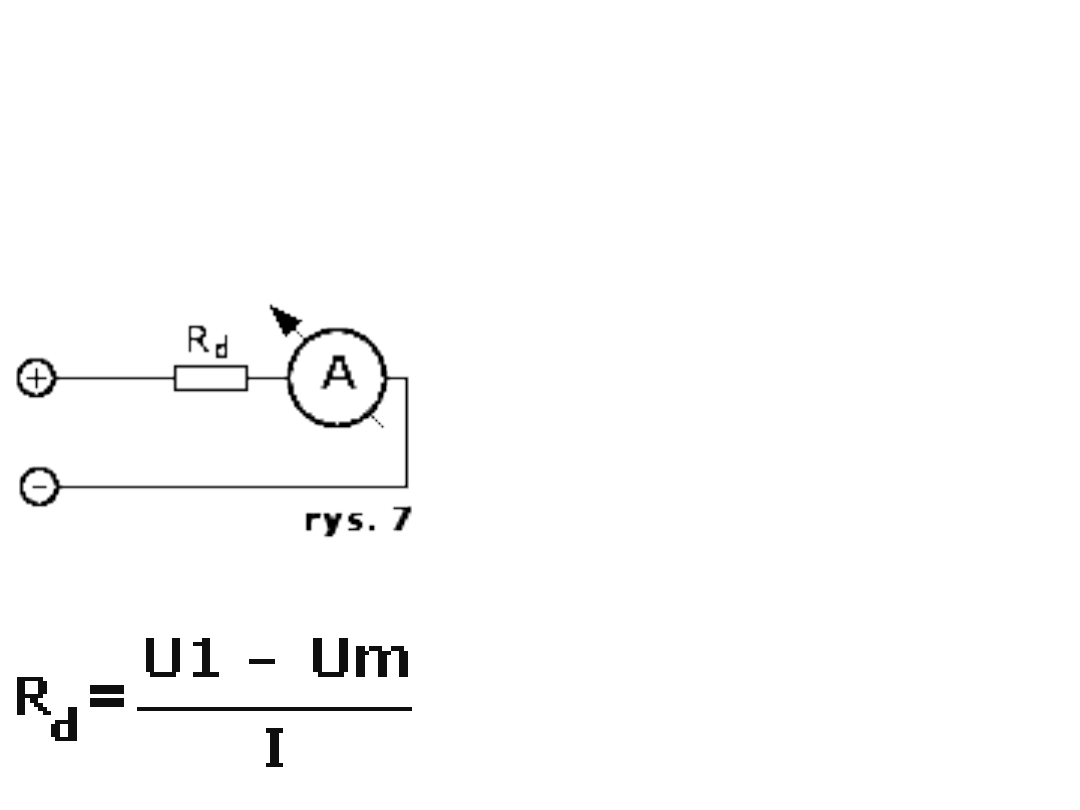
Pomiar napięcia -
Woltomierz
R
d
- oporność
opornika
dodatkowego;
U
1
- napięcie
mierzone;
U
m
- spadek napięcia
na
ustroju;
I - prąd
amperomierza
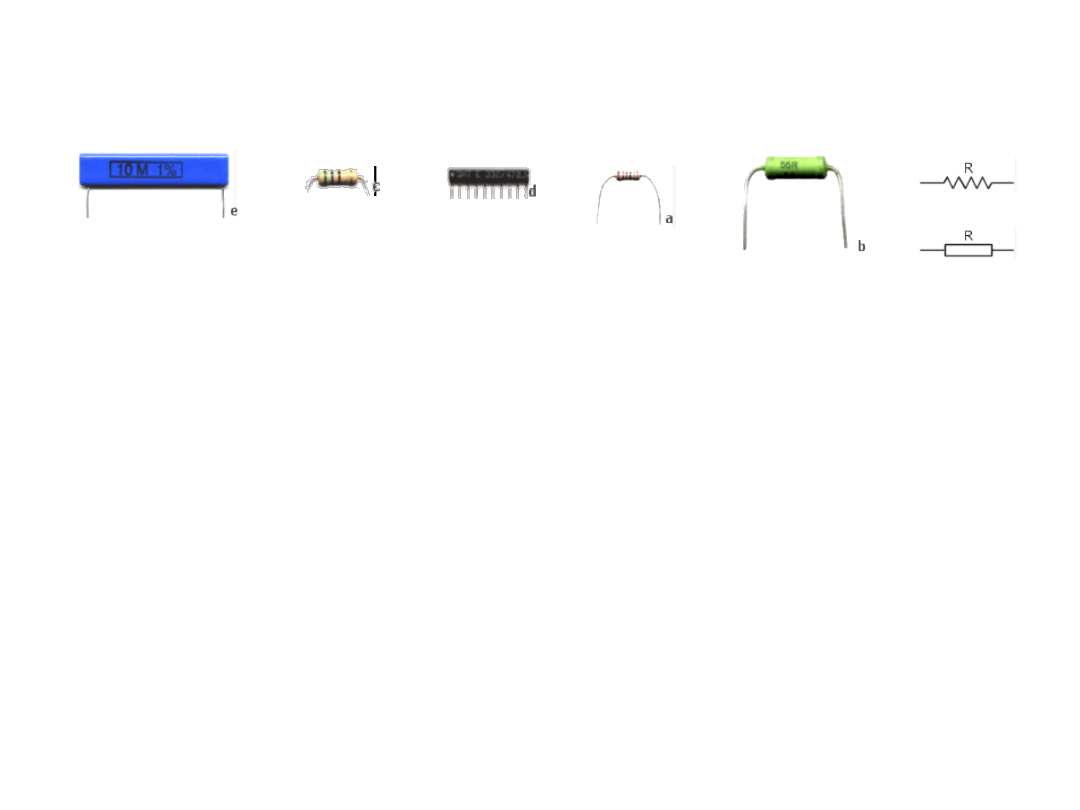
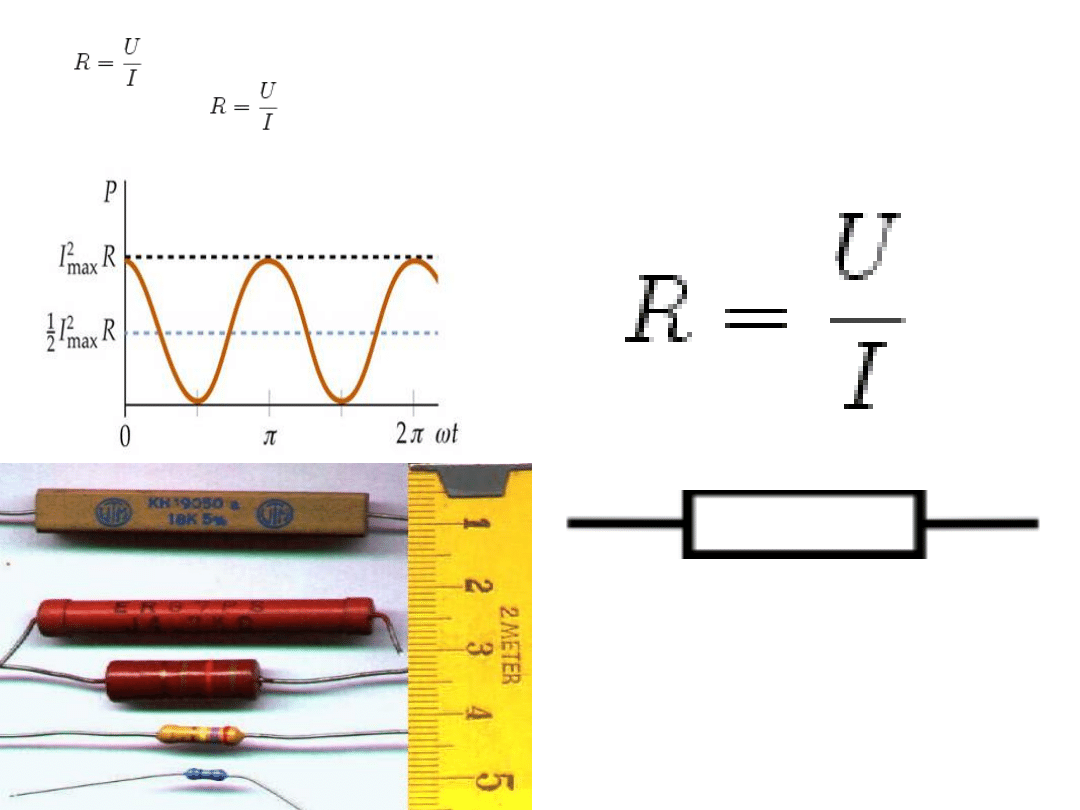
OPORNOŚĆ i
OPORNIKI
•
Szeregowe i równoległe łączenie rezystorów.
Z prawa Ohma, które można zapisać R=U/I,
wynikają następujące właściwości rezystorów:
- rezystancja zastępcza dwóch rezystorów
połączonych szeregowo (rys. 2.3) wynosi:
• R=R1+R2
•
czyli przez szeregowe połączenie rezystorów
zawsze otrzymuje się większą rezystancję,
rys. 2.3 - rezystancja zastępcza dwóch rezystorów
połączonych równolegle (rys 2.4) wynosi:
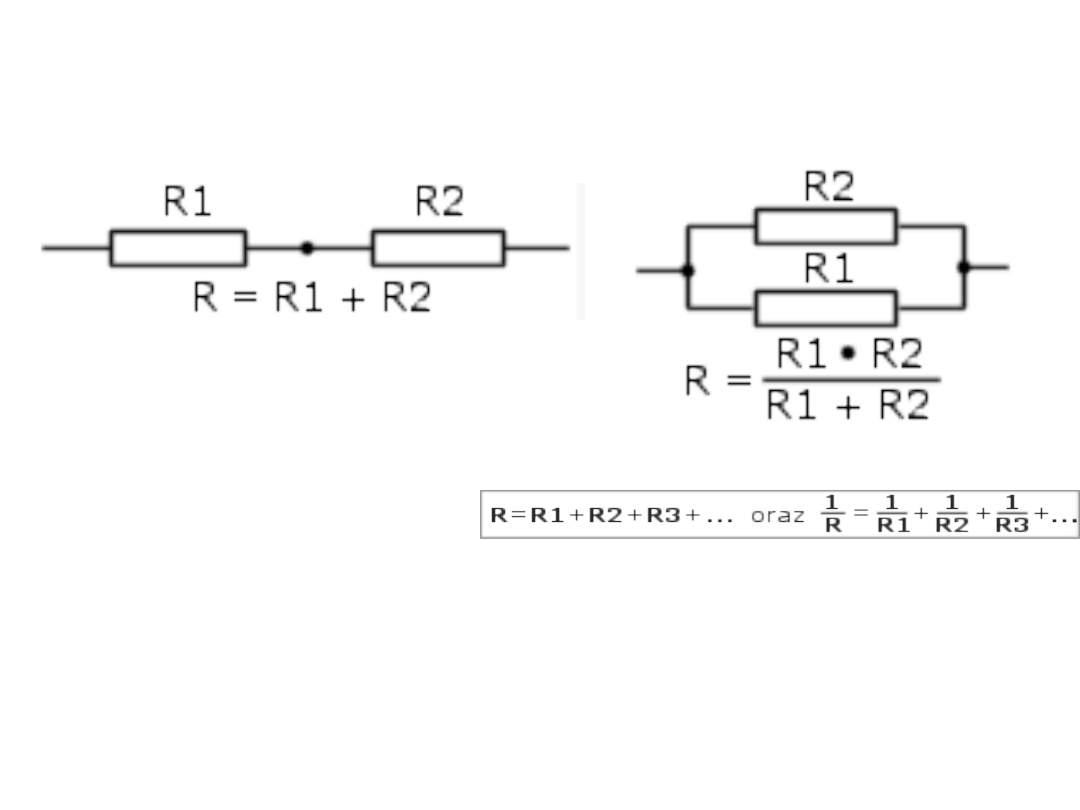
Połączenie szeregowe i
równoległe
2
.
3
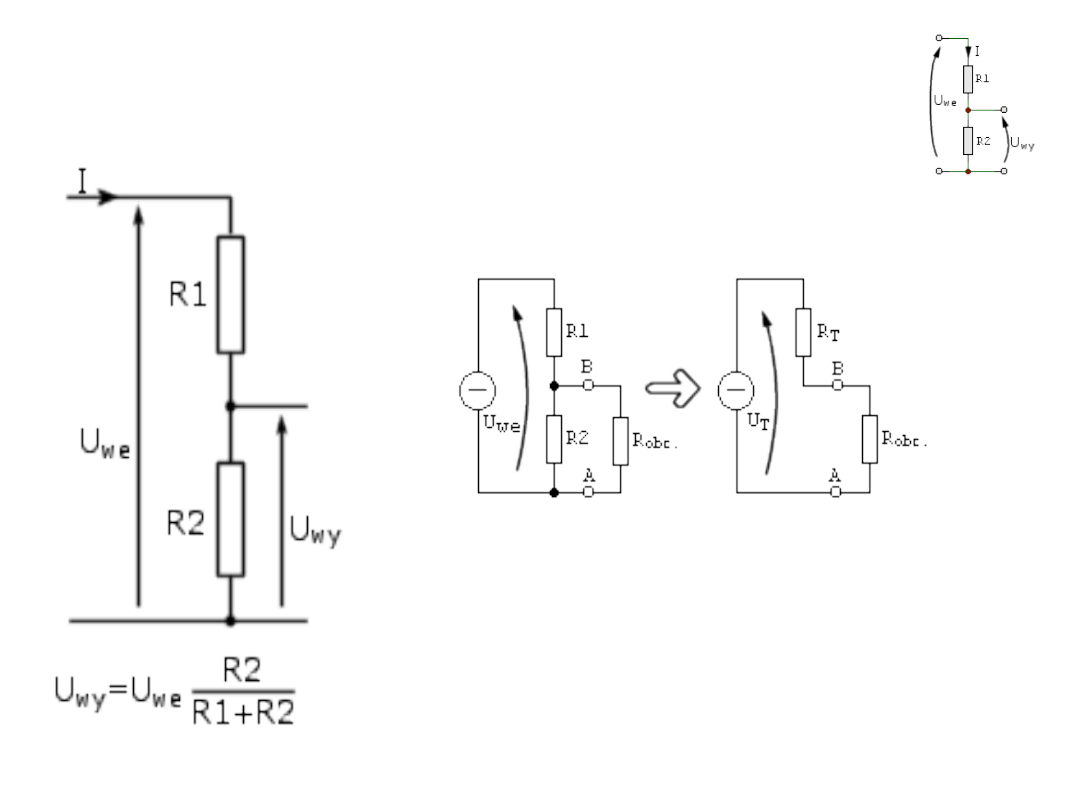
Dzielniki napięcia
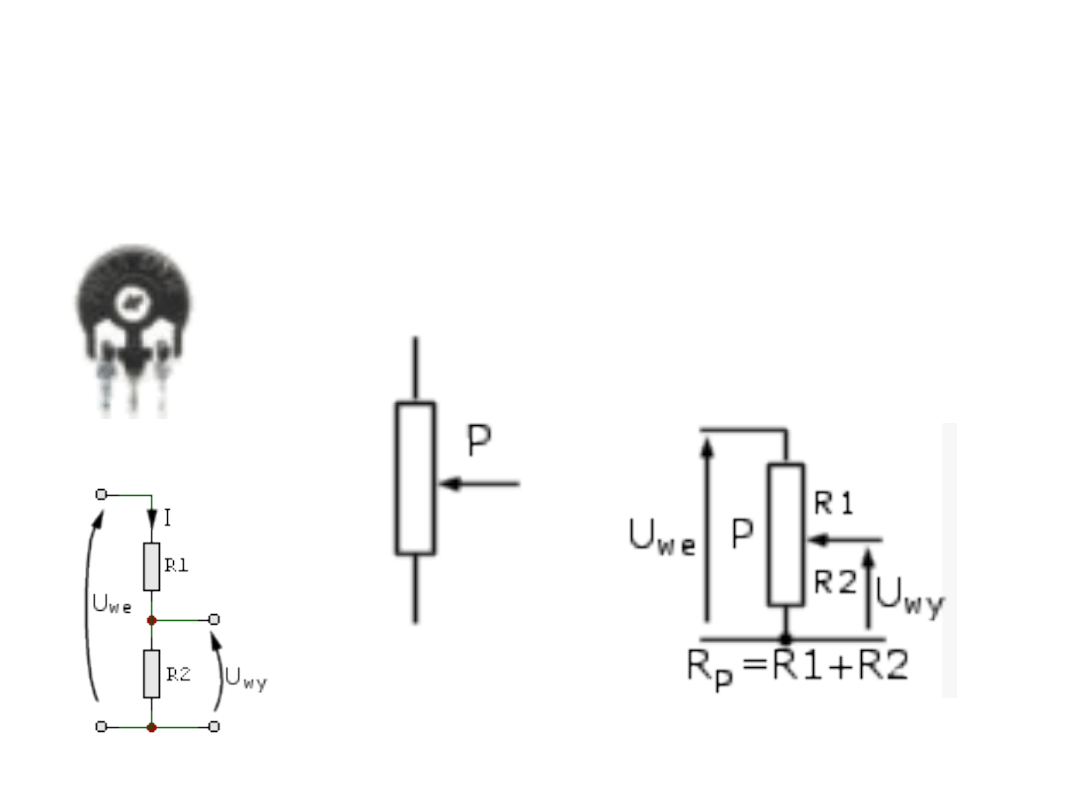
Dzielniki -
potencjometry
rys. 2.7
rys. 2.8
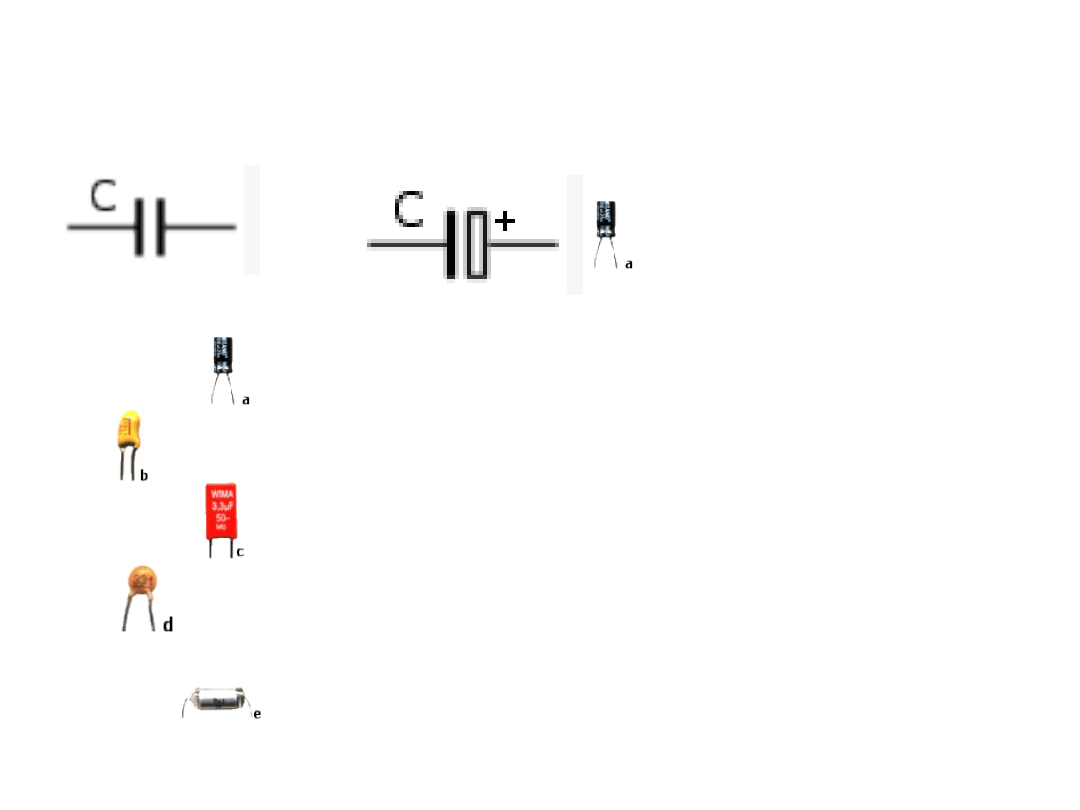
Pojemność -
kondensator
Kondensator jest
elementem nieco
bardziej
skomplikowanym niż
rezystor, gdyż prąd
płynący przez niego
nie jest wprost
proporcjonalny do
napięcia lecz do
szybkości jego zmian
i dlatego można
napisać:
I = dQ/dt Q = C U
I = C dU/dt
Z tego wzoru (jeśli
czegośnie rozumiesz
to zajrzyj do działu
trochę matematyki)
Zdjęcia przedstawiają
kondensatory:
a) elektrolityczny,
b) tantalowy,
c) poliestrowy,
d) ceramiczny,
e) styrofleksowy
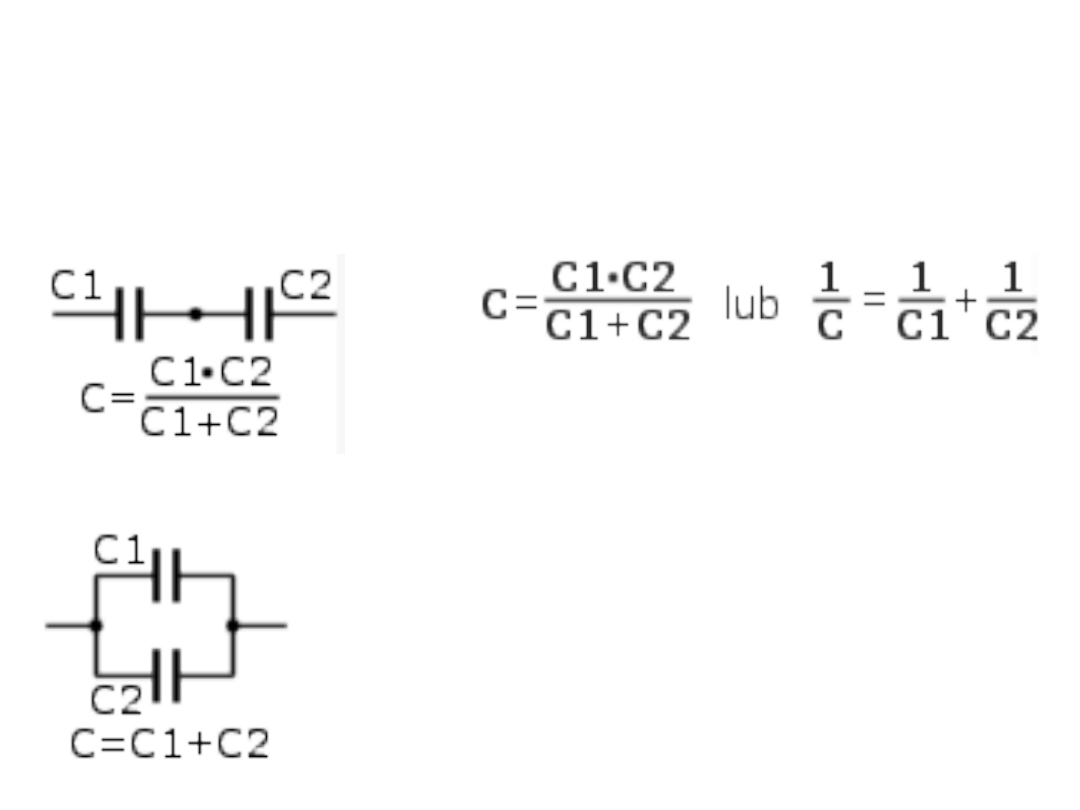
Łączenie
pojemności
szeregowe
równole
głe
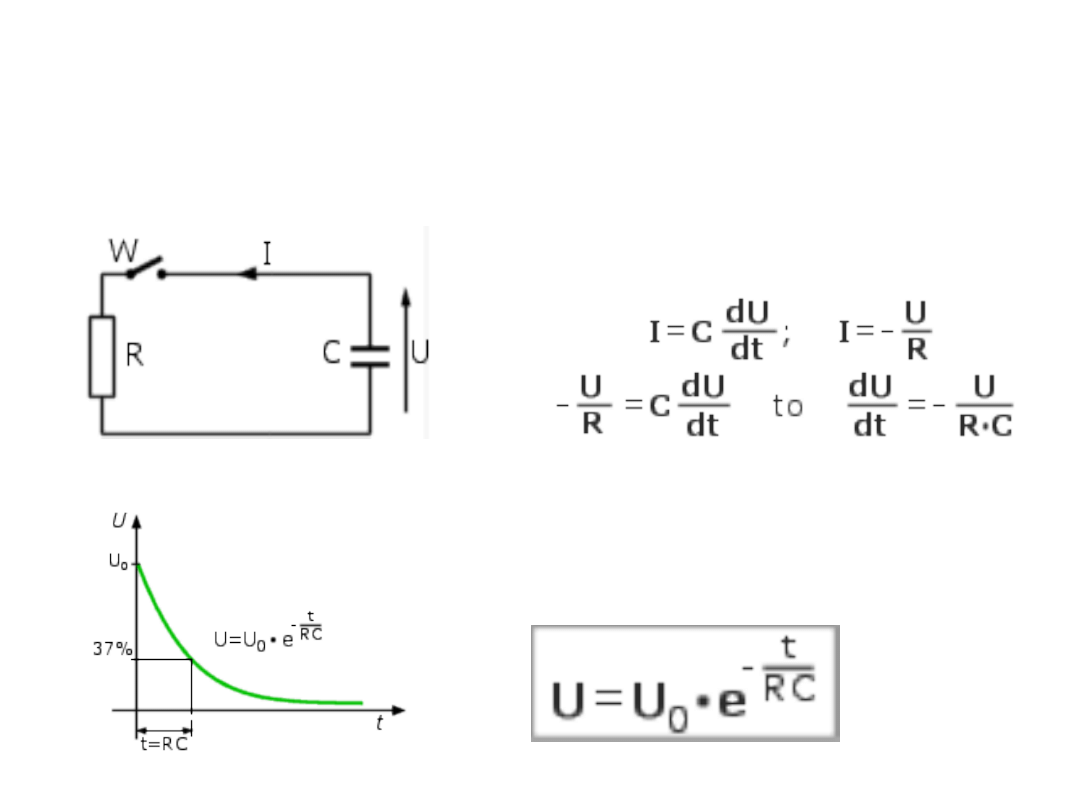
Rozładowanie
kondensatora
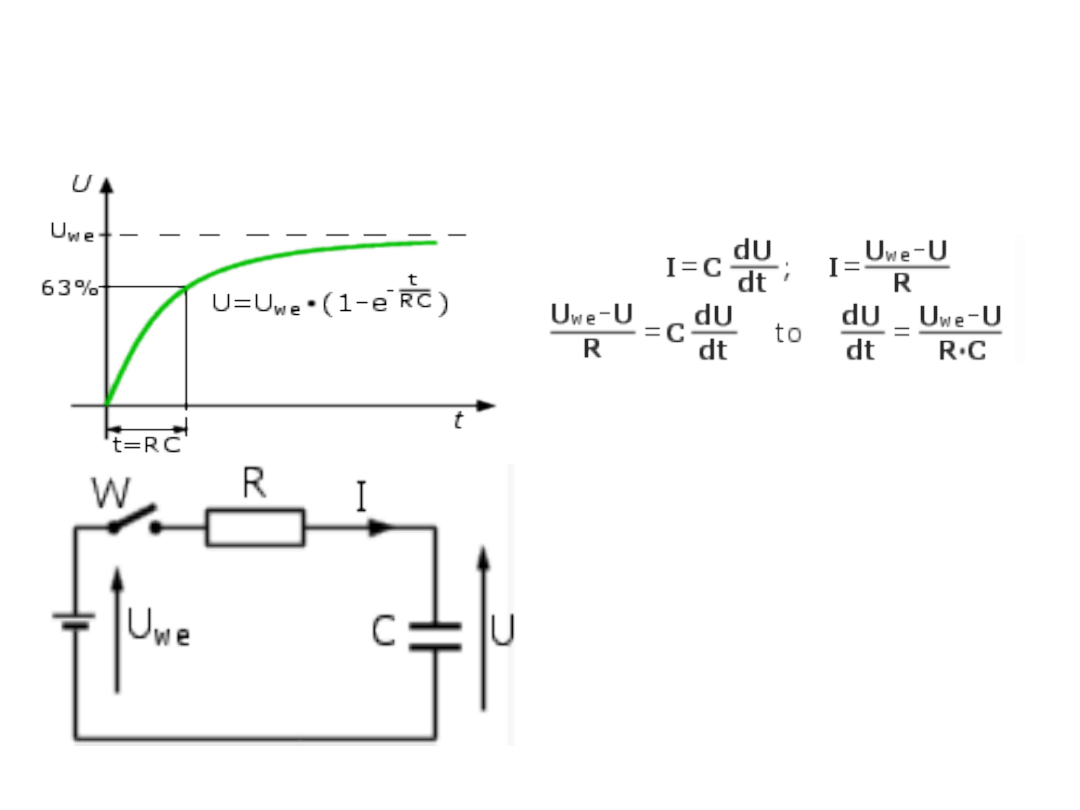
Ładowanie
kondensatora
Ładowanie kondensatora w układzie
RC. Na rys. 2.15 pokazany jest układ,
w którym po zamknięciu wyłącznika
w w chwili
t=0,
rozpocznie
się
ładowanie kondensatora C poprzez
rezystor R. Kondensator C będzie
ładowany prądem I z baterii o napięciu
U
we
. Można to zapisać w postaci
równań:
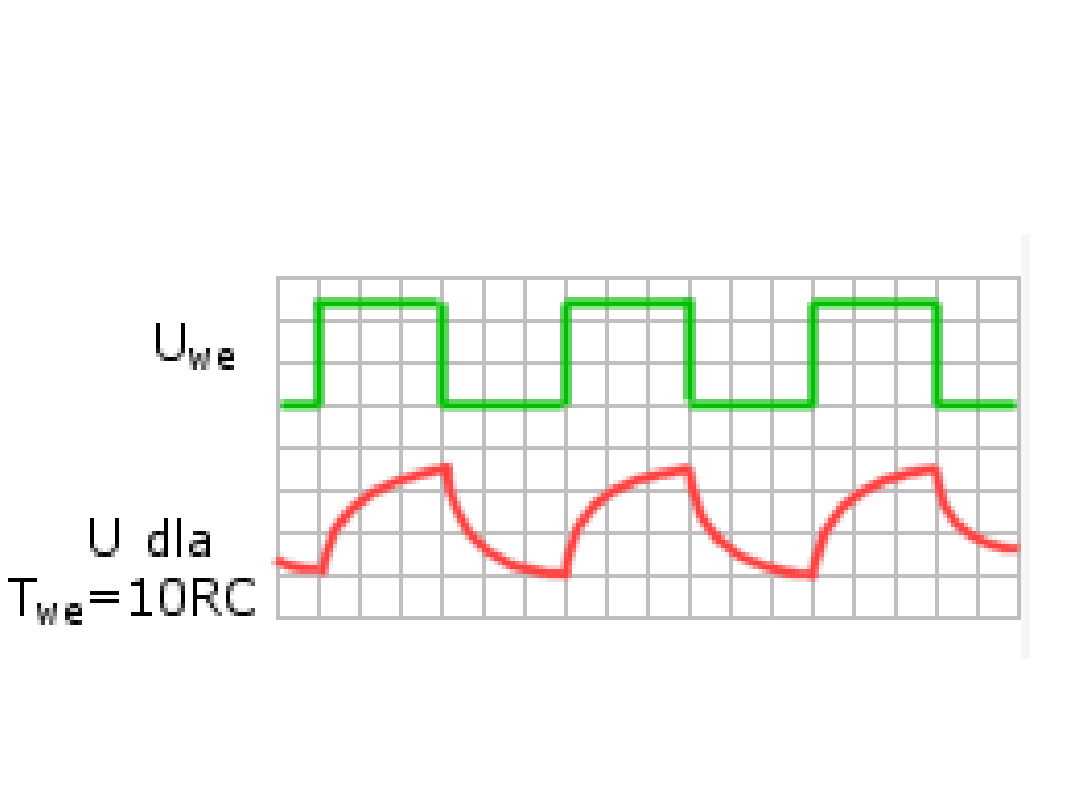
Zniekształcenia
sygnału
Zniekształcenie sygnału prostokątnego jest spowodowane istnieniem pojemności
(tutaj szkodliwej) a pojemność lubi się ładować co trwa. Czas ładowania τ = RC
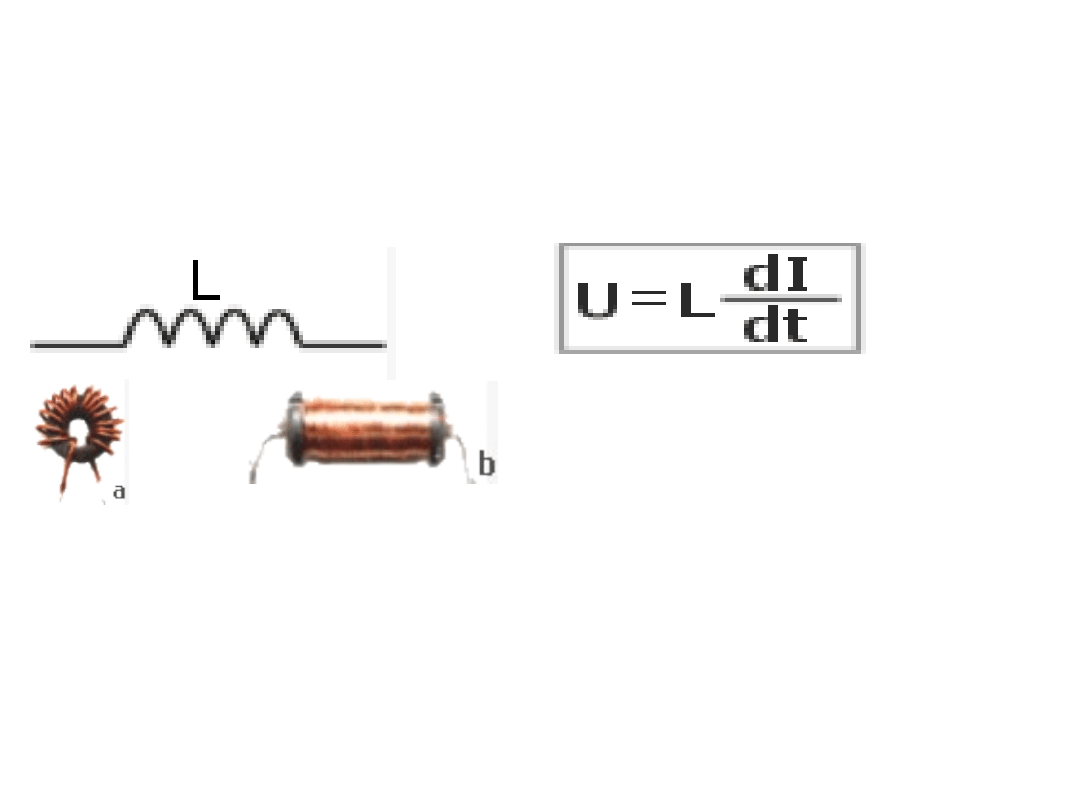
Indukcyjność
(cewka)
r
y
s
.
2
.
1
8
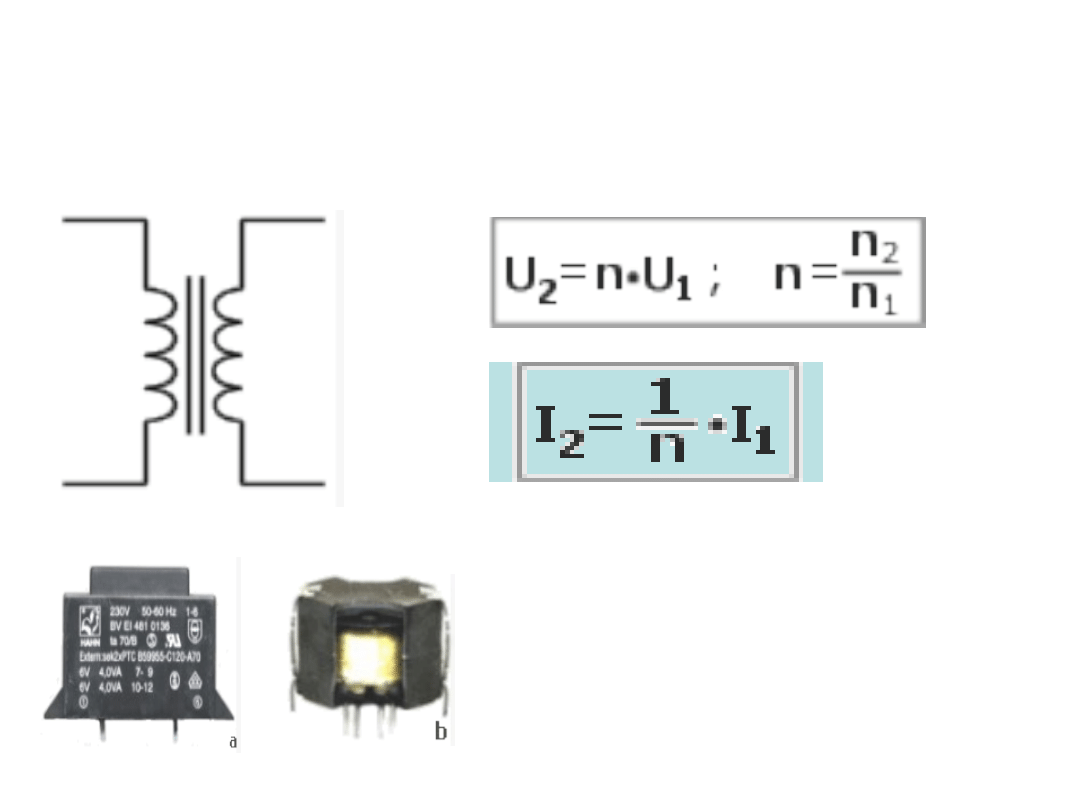
Transformator
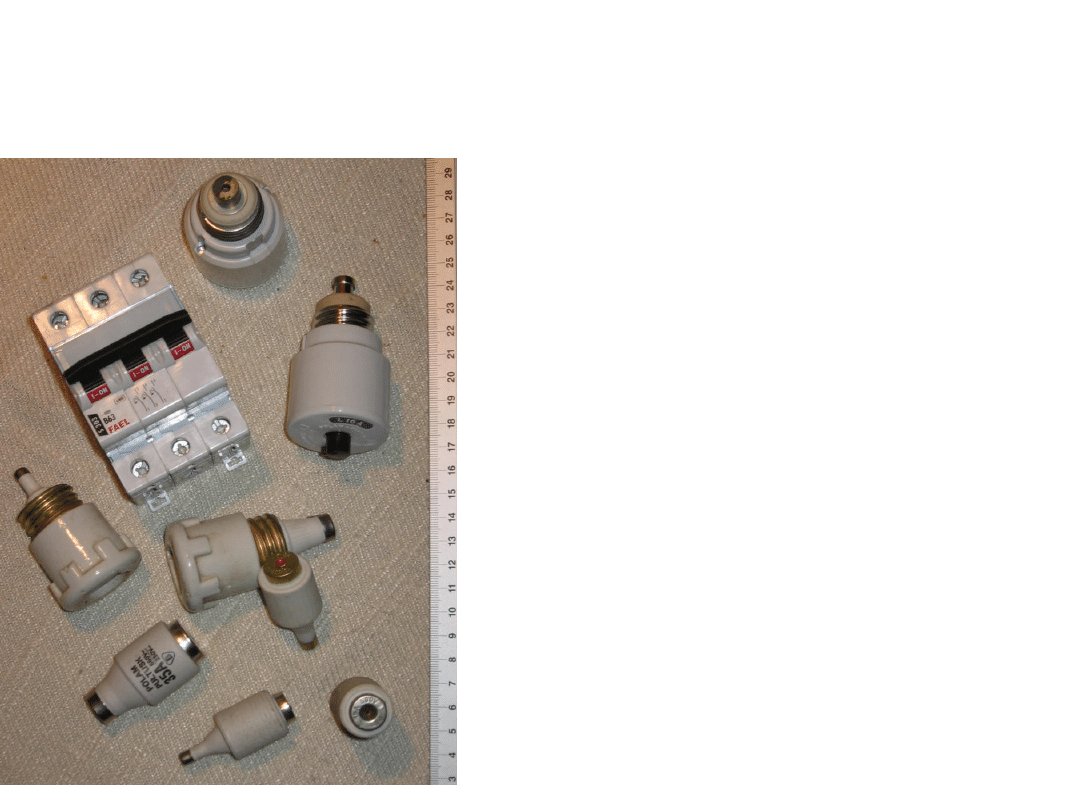
BEZPIECZNIKI
przeciążeniowe - przerywają obwód
elektryczny po przekroczeniu w
przewodzie określonego natężenia
prądu.
przeciwprzepięciowe - chonią
urządzenia przed przepięciami
występujacymi w sieci.
przeciw asymetrii - chroniące
urządzenia wielofazowe przed
zanikiem jednej z faz prądu
trójfazowego.
przeciwporażeniowe - chroniące
obsługę urządzeń przed porażeniem
prądem elektrycznym; coraz częściej
stosuje się bezpieczniki
różnicowo-prądowe
Wyłącznik różnicowo-prądowy (RCD) jest
to urządzenie służące do ochrony przed
porażeniem przez dotyk pośredni jak i
bezpośredni.
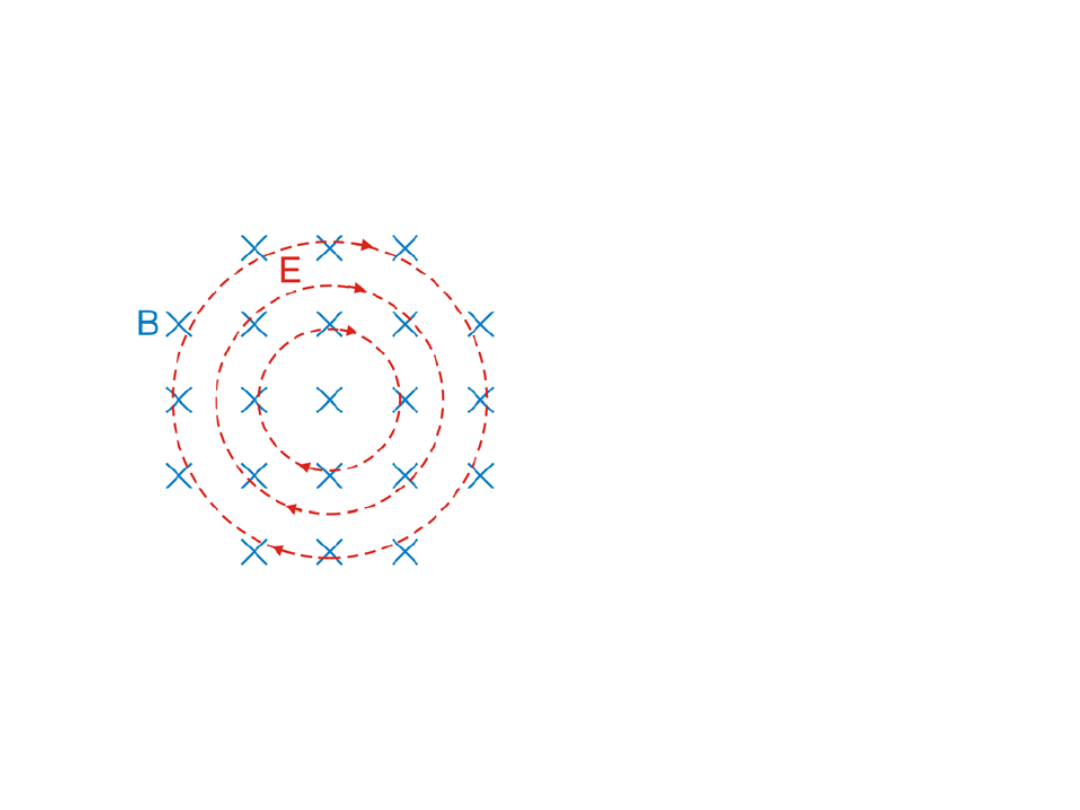
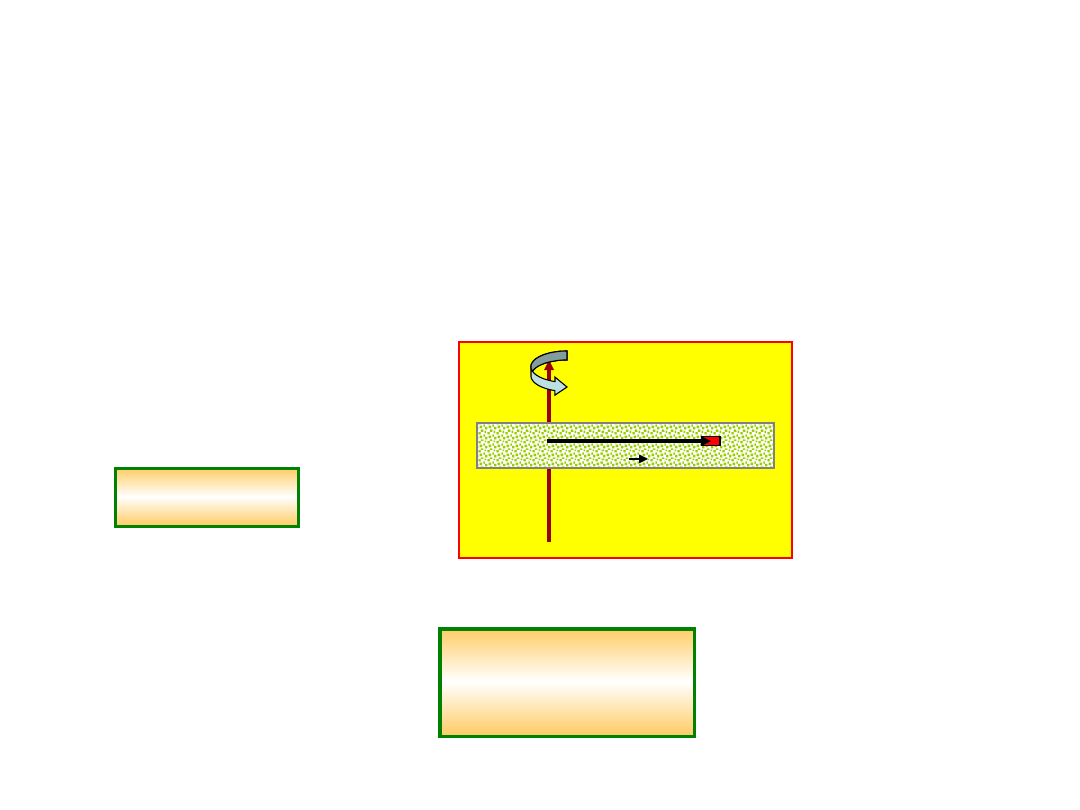
Indukowane pole
elektryczne
127
Zmianom pola
magnetycznego
towarzyszy zawsze
powstawanie pola
elektrycznego.
Jeżeli w obszarze zmieniającego się pola
magnetycznego nie ma przewodnika kołowego to nie
będziemy obserwować przepływu prądu, ale
indukowane pole elektryczne nadal istnieje. Jeżeli
znajdzie się tam przewodnik kołowy to zaindukowane
na skutek
Zmian wektora B pole elektryczne E spowoduje
przepływ ładunków
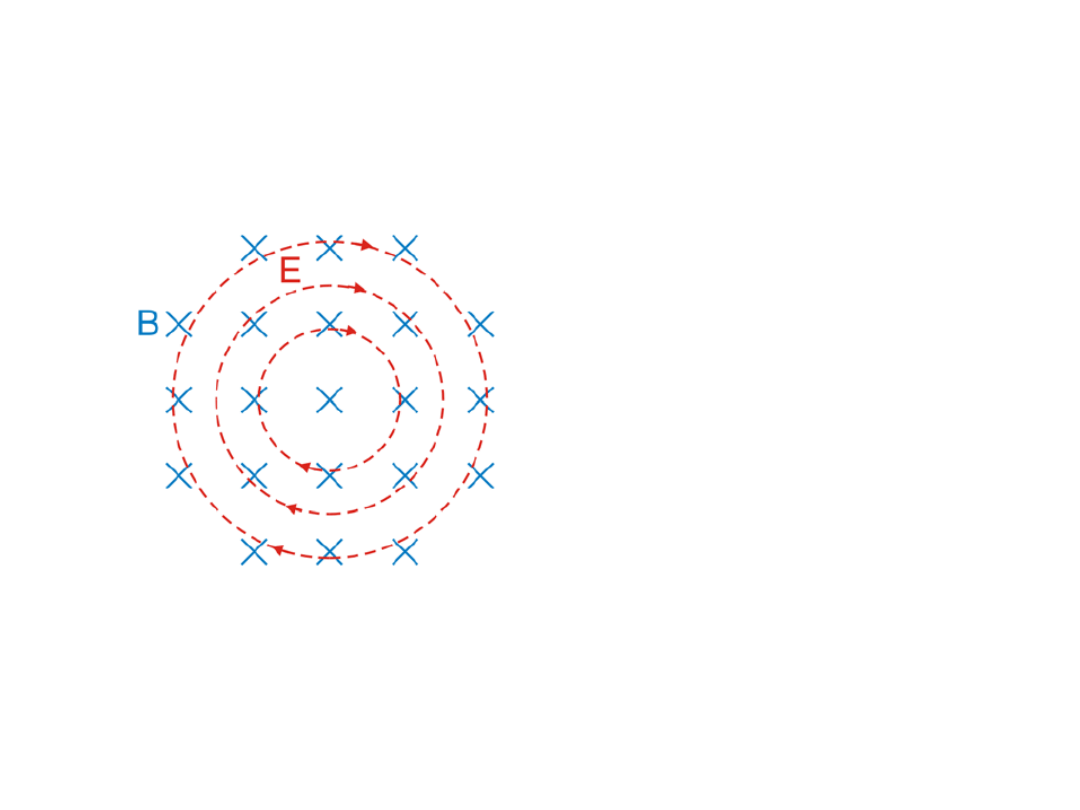
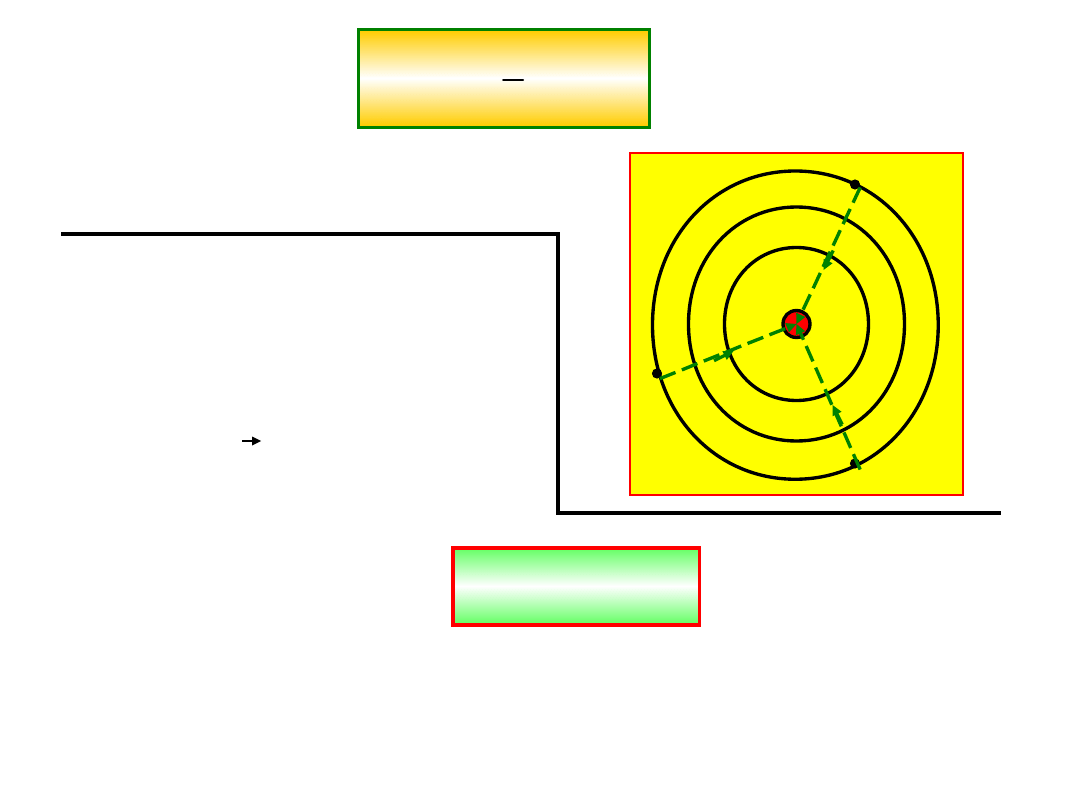
Indukowane pole
elektryczne
/
128
Linie sił pola
elektrycznego
indukowanego przez
zmienne pole
magnetyczne mają
kształt koncentrycznych
okręgów czyli w
odróżnieniu od linii sił
pola pochodzącego od
ładunków elektrycznych
są liniami zamkniętymi!
Indukowane pola elektryczne są związane ze
zmianą strumienia magnetycznego a nie z
ładunkami elektrycznymi.
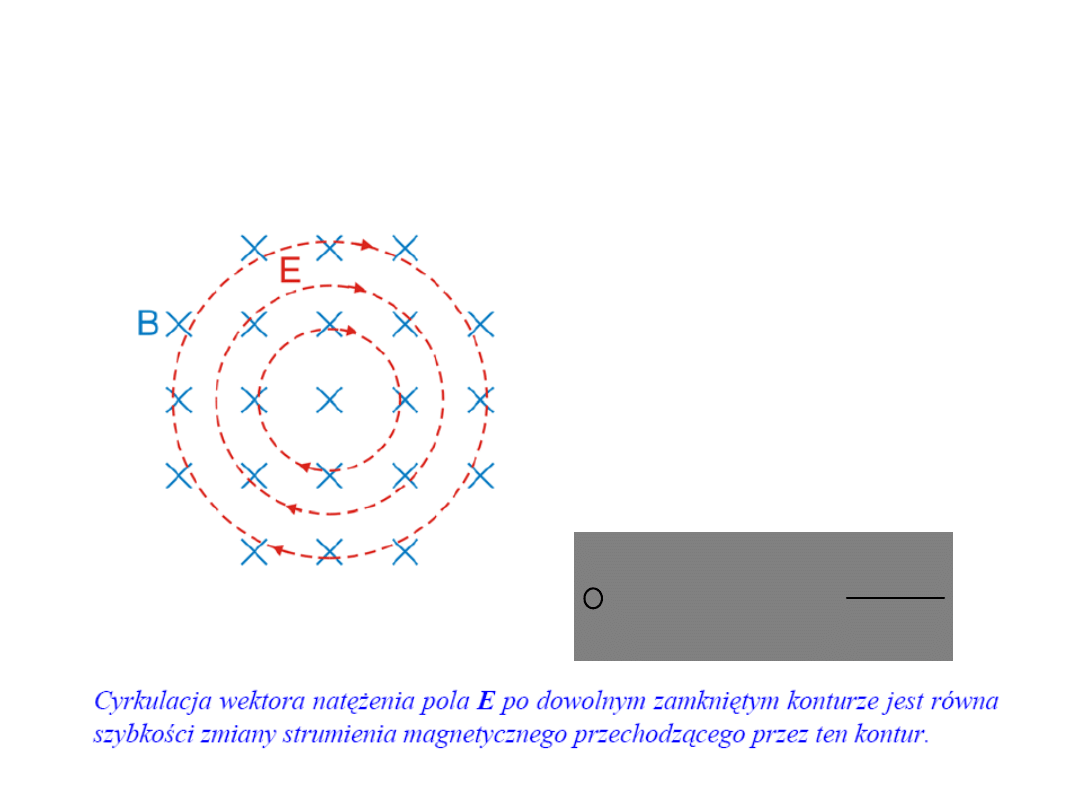
Indukowane pole
elektryczne
129
Indukowane pole
elektryczne nazywamy w
takim przypadku
wirowym polem
elektrycznym.
Stąd uogólnione prawo
indukcji Faradaya:
dt
d
Edl
B
Indukowane pole
magnetyczne
130
Zmieniające się pole
elektryczne wytwarza
zmienne pole
magnetyczne.
Stąd uogólnione prawo
Ampera:
I
dt
d
Bdl
E
0
0
0
Pole magnetyczne może być wytwarzane zarówno
przez przepływ prądu (prawo Ampera) jak i przez
zmienne pole elektryczne.
Fale elektromagnetyczne
131
Piotr Słoma CMF http://cmf.p.lodz.pl/psloma/
Prawo Gaussa dla pola elektrycznego
Ładunek wytwarza pole elektryczne o indukcji odwrotnie
proporcjonalnej do kwadratu odległości. Źródłem pola
elektrostatycznego są ładunki elektryczne – zaczynają się w nich i
kończą linie sił tego pola.
q
S
d
D
Prawo Gaussa dla pola magnetycznego
W przyrodzie nie istnieją magnetyczne odpowiedniki
ładunków elektrycznych. Linie sił pola magnetycznego są
krzywymi zamkniętymi.
0
S
d
B
Fale elektromagnetyczne
132
Piotr Słoma CMF http://cmf.p.lodz.pl/psloma/
Fale elektromagnetyczne
133
Piotr Słoma CMF http://cmf.p.lodz.pl/psloma/
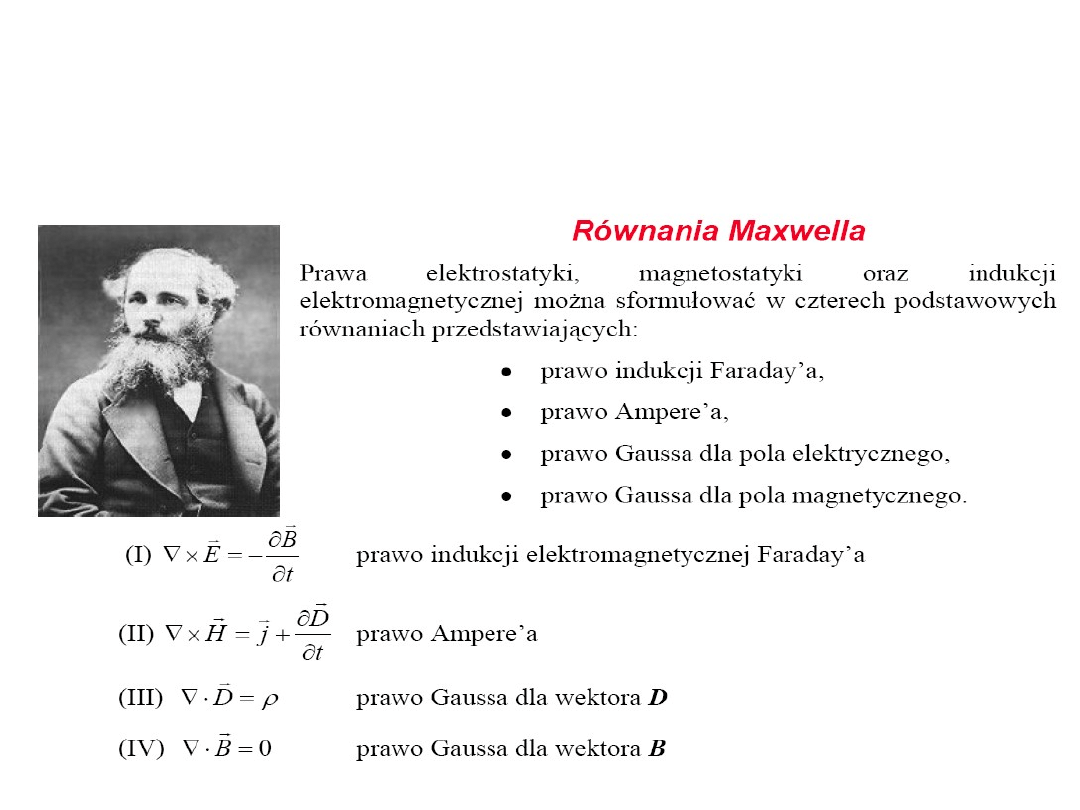
Równania Maxwella opisują cały kompleks zjawisk elektromagnetycznych w
skali makroskopowej (teoria Maxwella nie obejmuje mikropól atomowych
i cząsteczkowych – poprawnie opisuje je dopiero tzw. elektrodynamika
kwantowa) ujmując w postaci jednolitej teorii wszelkie prawidłowości
zaobserwowane wcześniej i wszelkie równania, którymi opisywano
zjawiska elektryczne i magnetyczne.
Na podstawie tych równań można wykazać zarówno istnienie fal
elektromagnetycznych, jak i określić ich prędkość, która równa jest
prędkości światła. W ten sposób Maxwell pierwszy pokazał, że światło ma
naturę fali elektromagnetycznej. Istnienie fal elektromagnetycznych
zostało eksperymentalnie potwierdzone przez Hertza w 1890 roku.
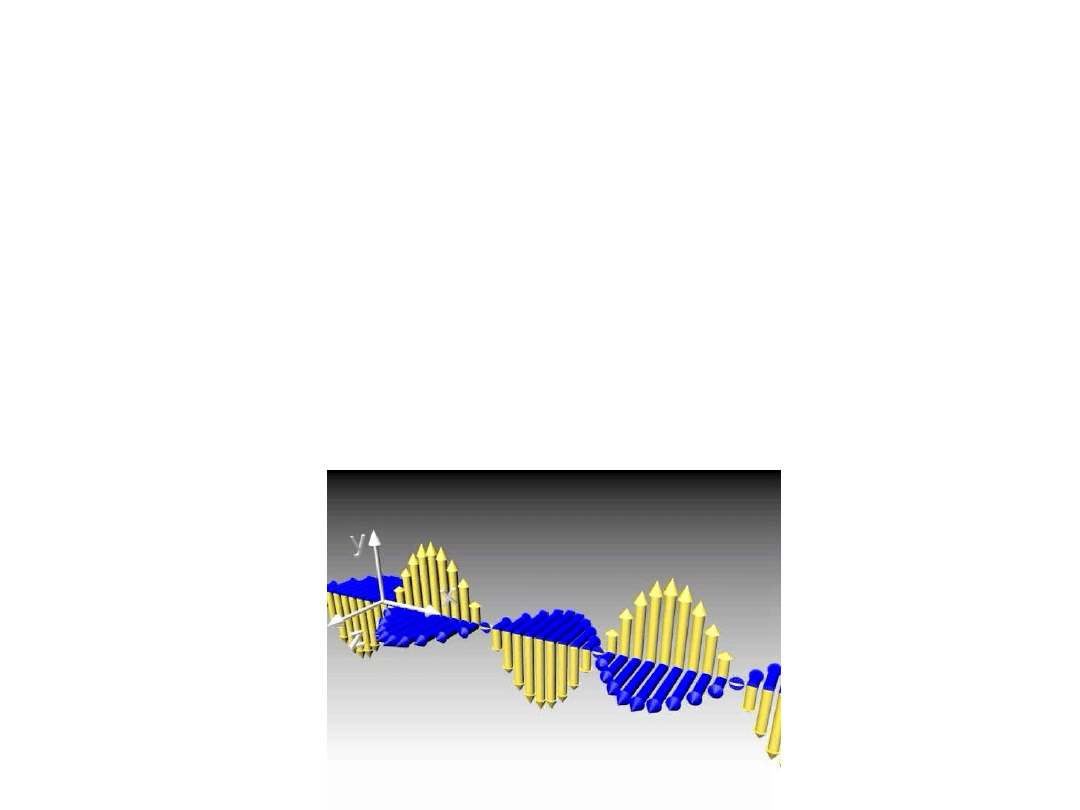
Fale elektromagnetyczne
Fala elektromagnetyczna polega na rozchodzeniu się w
przestrzeni zaburzenia w postaci drgań wektorów
natężenia pola elektrycznego i magnetycznego.
Oba wektory są prostopadłe zarówno do siebie wzajemnie
jak i do kierunku rozchodzenia się fali (fala poprzeczna),
są ponadto przesunięte w fazie o /2.
134
Fale elektromagnetyczne -
właściwości
135
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
- Slide 61
- Slide 62
- Slide 63
- Slide 64
- Slide 65
- Slide 66
- Slide 67
- Slide 68
- Slide 69
- Slide 70
- Slide 71
- Slide 72
- Slide 73
- Slide 74
- Slide 75
- Slide 76
- Slide 77
- Slide 78
- Slide 79
- Slide 80
- Slide 81
- Slide 82
- Slide 83
- Slide 84
- Slide 85
- Slide 86
- Slide 87
- Slide 88
- Slide 89
- Slide 90
- Slide 91
- Slide 92
- Slide 93
- Slide 94
- Slide 95
- Slide 96
- Slide 97
- Slide 98
- Slide 99
- Slide 100
- Slide 101
- Slide 102
- Slide 103
- Slide 104
- Slide 105
- Slide 106
- Slide 107
- Slide 108
- Slide 109
- Slide 110
- Slide 111
- Slide 112
- Slide 113
- Slide 114
- Slide 115
- Slide 116
- Slide 117
- Slide 118
- Slide 119
- Slide 120
- Slide 121
- Slide 122
- Slide 123
- Slide 124
- Slide 125
- Slide 126
- Slide 127
- Slide 128
- Slide 129
- Slide 130
- Slide 131
- Slide 132
- Slide 133
- Slide 134
- Slide 135
Wyszukiwarka
Podobne podstrony:
Powtórka z Fizyki 2009r
Powtórzenie z Fizyki Elektrostatyka
III Kolokwium z fizyki 2006(2), Nieorganiczna, chemia2, Arkusze powtórzeniowe, Pobieranie1, studia 1
Testy powtorzeniowe z matematyki, fizyki, chemii i geografii dla gimnazjalistow
EGZAMIN GIMNAZJALNY Testy powtorzeniowe z matematyki fizyki chemii oraz geografii wraz z rozwiazania
Wykład z fizyki 8
Wykład 3 powtórzenie 2010 studenci (1)
Elementy fizyki jądrowej
Wykład z fizyki 14
Matematyka 2 Lekcje powtórzeniowe w gimnazjum
3 Podstawy fizyki polprzewodnik Nieznany (2)
POWTÓRKA SREDNIOWIECZE
Powtórka komunikacja
IE opracowanie 2013r dr J Barcik
więcej podobnych podstron