Twierdzenie o próbkowaniu
H. Nyquist 1928, V.A. Kotielnikow 1933, J.M. Whittaker
1935, C.E. Shannon 1949
Próbkowanie sygnałów ciągłych
Ewa Hermanowicz
n
nT
x
n
x
c
)
(
]
[
Próbkowanie okresowe (równomierne) sygnału
)
(t
x
c
– okres próbkowania w sekundach
– częstotliwoś
ć
próbkowania w Hz
T
F
p
/
1
T
)
(t
x
c
T
)
(
]
[
nT
x
n
x
c
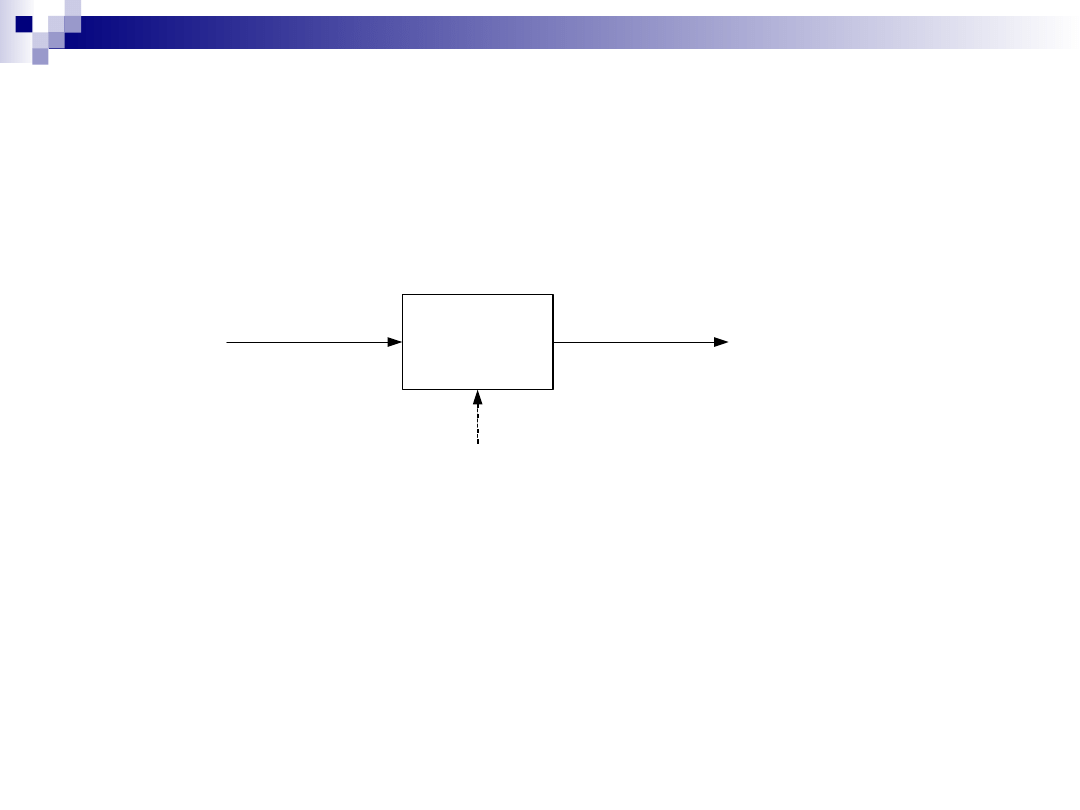
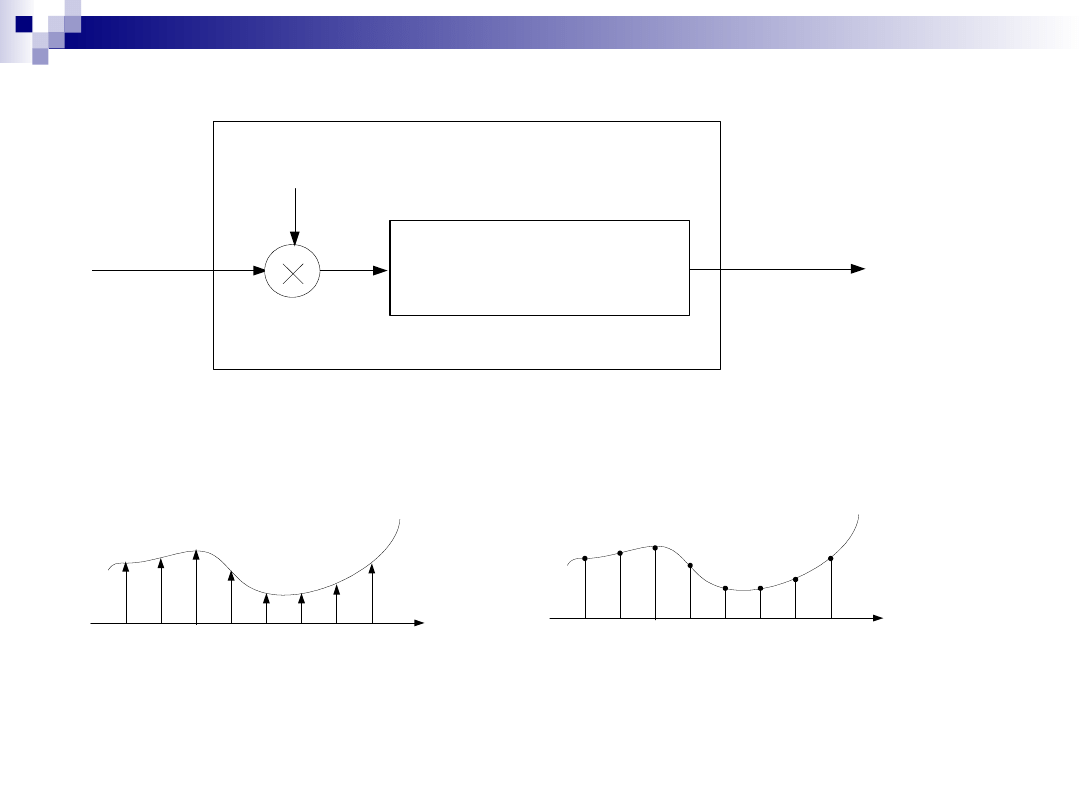
C/D
Schemat blokowy reprezentujący idealny
przetwornik (konwerter) czasu ciągłego na czas
dyskretny – jest to idealny system próbkujący.
Układ fizyczny może by
ć
zrealizowany na różne sposoby.
W ogólności operacja próbkowania nie jest odwracalna, tzn. nie
zawsze można odtworzy
ć
na podstawie .
Aby zapewni
ć
odwracalnoś
ć
, sygnał próbkowany musi
spełnia
ć
twierdzenie o próbkowaniu.
)
(t
x
c
]
[n
x
)
(t
x
c
Twierdzenie Nyquista o próbkowaniu
Niech będzie sygnałem o ograniczonym widmie, tzn.
Wówczas sygnał jest jednoznacznie określony przez ciąg swoich
próbek
jeżeli
lub inaczej (częstotliwości w Hz): ,
czyli jeżeli częstotliwoś
ć
próbkowania jest co najmniej dwukrotnie
większa od maksymalnej częstotliwości w widmie sygnału .
Wówczas mówimy o próbkowaniu prawidłowym.
)
(t
x
c
s
rad
dla
0
)
(
M
c
j
X
)
(t
x
c
,
1
,
0
),
(
]
[
n
nT
x
n
x
c
M
p
p
F
T
2
2
2
M
p
F
F
2
)
(t
x
c
Minimalna częstotliwoś
ć
próbkowania, przy której można jeszcze
odtworzy
ć
sygnał bez zniekształceń, tzn. częstotliwoś
ć
, nazywa się szybkością Nyquista. Odpowiadający jej
maksymalny okres próbkowania
nazywa się przedziałem Nyquista. Częstotliwoś
ć
Nyquista to
maksymalna częstotliwoś
ć – –
w widmie sygnału .
Terminologia USA
–
Nyquist frequency
–
Nyquist rate
–
Nyquist interval
)
(t
x
c
)
(t
x
c
M
F
M
F
M
F
2
M
F
2
1
M
p
F
F
2
p
F
T
/
1
)
(t
x
c
Konwersja sekwencji
impulsów na ciąg dyskretny
)
(
]
[
nT
x
n
x
c
C/D
k
przetworni
-
e
Próbkowani
)
(t
T
)
(t
x
c
T
C/D
k
przetworni
-
e
Próbkowani
)
(t
x
p
czas
t
0 T T
2 T
3
T
3
T
2
)
(t
x
c
1
]
[n
x
próbki
numer
n
0 1 2 3
3
2
4
Reprezentacja operacji
próbkowania jako procesu
dwustopniowego

Reprezentacja operacji
próbkowania jako procesu dwustopniowego
(dla potrzeb czytelnego opisu analitycznego)
• mnożenie przez ciąg (sekwencję) impulsów Diraca,
• zamiana sekwencji impulsów na ciąg dyskretny.
Dziedzina czasu
a z właściwości próbkującej delty Diraca (
)
Dziedzina częstotliwości
wówczas
n
c
T
c
p
nT
t
t
x
t
t
x
t
x
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
0
0
0
t
t
t
x
t
t
t
x
n
c
p
nT
t
nT
x
t
x
)
(
)
(
)
(
dt
e
t
x
t
x
j
X
t
j
c
c
c
)
(
)]
(
[
)
(
F
k
p
p
T
k
j
t
p
)
(
)
(
)]
(
[
F
k
p
c
c
p
k
j
X
T
j
j
X
j
X
p
)]
(
[
1
)
(
)
(
2
1
)
(
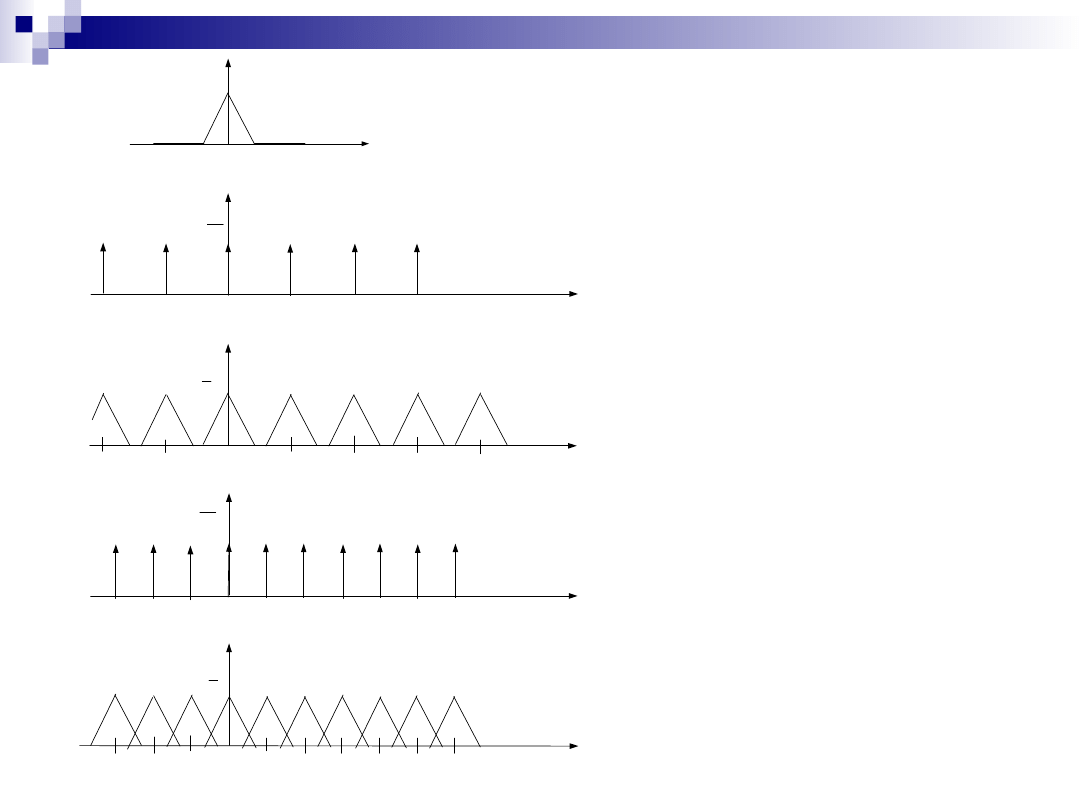
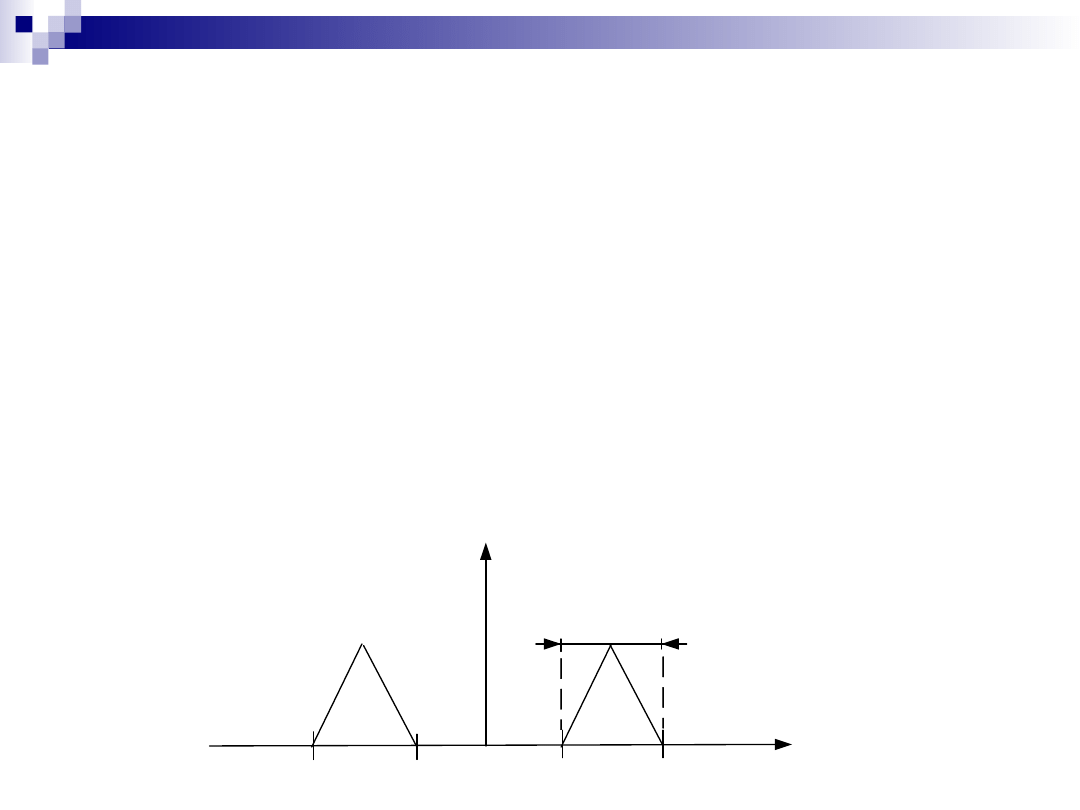
Wniosek: widmo sygnału jest superpozycją
okresowo powtarzających się widm sygnału ciągłego . Kolejne
składniki są poprzesuwane o całkowitą wielokrotnoś
ć
pulsacji próbkowania .
Przyjmijmy, że tak, jak w twierdzeniu
Nyquista, tzn. największą składową w widmie jest
składowa o pulsacji .
)
(
j
X
p
)
(t
x
p
)
(t
x
c
)
(
j
X
p
p
M
c
j
X
dla
0
)
(
)
(
j
X
c
M
)
(
j
X
p
M
)
(
j
X
c
0
1
M
0
)
(
j
p
T
2
0
0
p
p
p
2
p
2
p
3
T
1
T
1
)
(
j
X
p
p
p
2
p
p
2
p
3
p
3
p
p
p
2
p
2
0
)
(
j
p
T
2
p
3
p
4
p
5
p
M
M
p
M
M
p
p
p
2
p
2
p
3
A. Rozłączne
widma składowe
B. Widma
składowe nie są
rozłączne, ale
nakładają się
M
p
2
M
p
2
Zastosujemy 2 różne
pulsacje próbkowania: A i
B
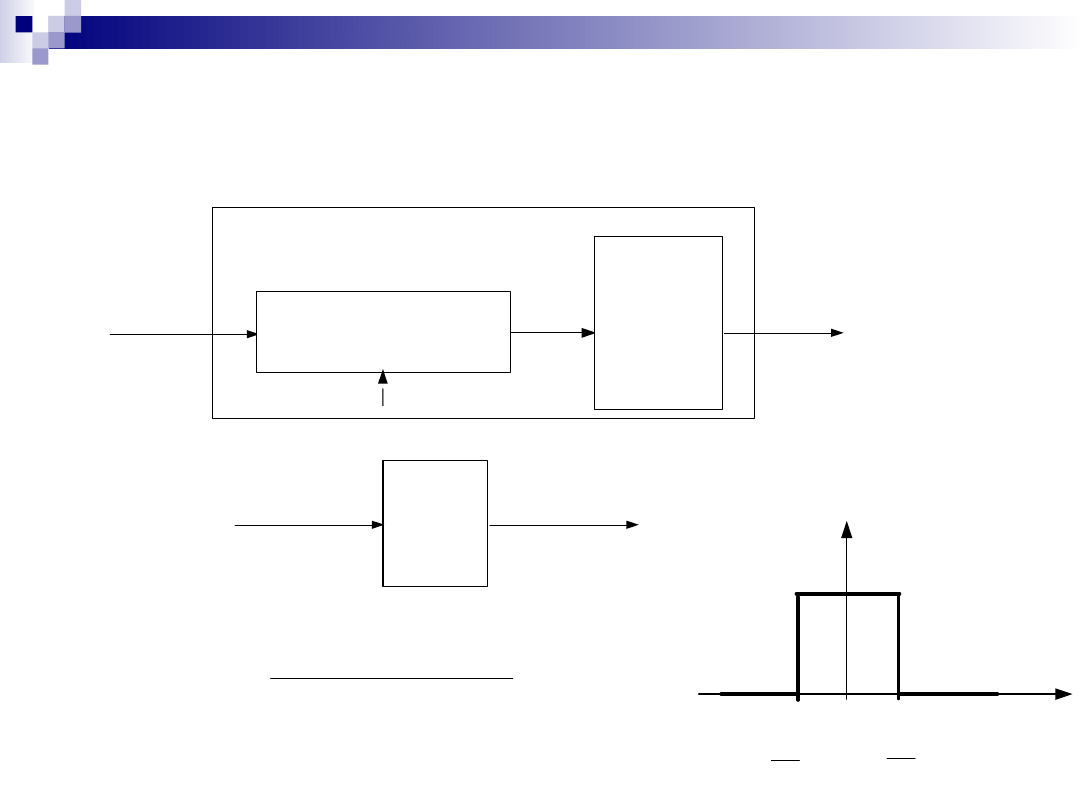
Rekonstrukcja na podstawie ;
system idealny odtwarzający sygnał ciągły
)
(t
x
c
]
[n
x
)
(
0
t
x
Zamiana ciągu dyskretnego
na sekwencję impulsów
Diraca
]
[n
x
D/C
k
przetworni
-
e
Odtwarzani
)
(t
x
p
Filtr idealny
dolno-
przepustowy
T
)
(
j
H
d
D/C
]
[n
x
)
(
0
t
x
W systemie idealnym .
)
(
)
(
0
t
x
t
x
c
)
(
j
H
d
T
T
T
0
n
T
nT
t
T
nT
t
n
x
t
x
/
)
(
]
/
)
(
sin[
]
[
)
(
0
wzór
interpolacyj
ny
Shannona

Wyprowadzenie wzoru interpolacyjnego Shannona
n
d
n
d
T
nT
t
T
nT
t
n
x
nT
t
h
n
x
t
h
n
x
t
x
/
)
(
]
/
)
(
sin[
]
[
)
(
]
[
)
(
]
[
)
(
0
T
t
tT
tT
j
H
t
h
d
d
sinc
)
sin(
)]
(
[
)
(
1
F
gdzie
Wówczas
i cały przebieg jest rekonstruowany na
bazie funkcji sinc( ).
0
,
1
0
,
)
sin(
sinc
x
x
x
x
x
)
(
)
(
0
t
x
t
x
c
Twierdzenie o próbkowaniu sygnałów
pasmowych
Jeżeli sygnał analogowy zajmuje pasmo w
Hz, to można go bezbłędnie odtworzy
ć
na podstawie ciągu jego
równoodległych próbek
pod warunkiem, że szybkoś
ć
próbkowania jest co
najmniej dwukrotnie większa od szerokości pasma czyli, gdy
a inaczej , gdzie to odstęp (okres
próbkowania równomiernego) w sekundach, jak poprzednio.
)
,
(
),
(
t
t
x
c
B
n
nT
x
n
x
c
)
(
]
[
T
F
p
/
1
B
B
F
p
2
)
2
/(
1 B
T
T
)
(
j
X
c
0
L
U
L
U
B
2

Program wykładu. (około 1 godziny lekcyjnej – 45 min – na
każdy punkt; uwaga – kolejnoś
ć
realizacji poszczególnych
punktów może by
ć
zmieniona celem synchronizacji z
programem
ć
wiczeń).
1. Klasyfikacja sygnałów.
2. Analiza widmowa sygnałów deterministycznych.
Przekształcenie całkowe Fouriera.
3. Właściwości przekształcenia całkowego. Widmo sygnału
analogowego. Twierdzenie o próbkowaniu.
4. Dyskretno-czasowe przekształcenie Fouriera (DTFT).
5. Właściwości przekształcenia DTFT. Widmo sygnału
dyskretnego.
6. Kształtowanie widma przez system liniowy.
7. Dyskretny sygnał zespolony – amplituda, faza i pulsacja
chwilowa.
8. Przekształcenie Hilberta sygnału dyskretnego –
zastosowania.
9. Obwiednia zespolona rzeczywistego dyskretnego sygnału
pasmowego.

10. Konwersja analogowo-cyfrowa.
11. Konwersja cyfrowo-analogowa.
12. Szum kwantyzacji. Model addytywny.
13. Obliczanie stosunku mocy sygnału do szumu kwantyzacji.
14. Równania różnicowe systemów dyskretnych o skończonej
(FIR) i o nieskończonej (IIR) odpowiedzi impulsowej.
15. Schematy strukturalne systemów dyskretnych.
16. Przekształcenie Z.
17. Transmitancja systemu dyskretnego.
18. Systemy dyskretne o skończonej odpowiedzi impulsowej
(FIR).
19. Systemy dyskretne o nieskończonej odpowiedzi impulsowej
(IIR).
20. Realizowalnoś
ć
systemu dyskretnego w czasie rzeczywistym,
a przyczynowoś
ć
.
21. Stabilnoś
ć
. Minimalnofazowoś
ć
systemu dyskretnego.

22. Podstawy filtracji cyfrowej. Filtr FIR – algorytm, struktura.
23. Filtr IIR – algorytmy, struktury. Przykłady projektowania
elementarnych filtrów.
24. Dyskretna transformacja Fouriera – DFT.
25. Szybka transformacja Fouriera – FFT. Zastosowania.
26. Powiązania transformat.
27. Splot dyskretny liniowy.
28. Splot cykliczny (kołowy). Zastosowania.
29. Wprowadzenie do interpolacji i decymacji.
30. Zastosowania interpolacji i decymacji.
Program
ć
wiczeń.
1. Przekształcenie całkowe Fouriera. Widmo sygnału analogowego.
Przykłady.
2. Przekształcenie dyskretno-czasowe Fouriera (DTFT). Widmo
sygnału dyskretnego. Przykłady.
3. Sygnał zespolony – amplituda, faza i pulsacja chwilowa.
Transformator i filtr Hilberta. Obwiednia zespolona rzeczywistego
dyskretnego sygnału pasmowego. Kształtowanie widma przez
system liniowy. Przykład.
4. Próbkowanie, kwantowanie i kodowanie – przykłady. Konwersja
analogowo-cyfrowa i konwersja cyfrowo-analogowa.
5. Szum kwantyzacji. Obliczanie stosunku mocy sygnału do szumu
kwantyzacji.
6. Przekształcenie Z proste i odwrotne. Przykłady.
7. Systemy dyskretne o skończonej (FIR) i o nieskończonej (IIR)
odpowiedzi impulsowej – porównanie właściwości. Równania
różnicowe – algorytmy. Schematy strukturalne. Transmitancje.
8. Kolokwium.

9. Realizowalnoś
ć
systemu dyskretnego w czasie rzeczywistym, a
przyczynowoś
ć
. Stabilnoś
ć
. Minimalnofazowoś
ć
systemu
dyskretnego. Przykłady.
10. Podstawy filtracji cyfrowej.
11. Dyskretno-czasowa (DTFT), dyskretna (DFT) i szybka (FFT)
transformacja Fouriera – porównanie na przykładzie.
12. Powiązania transformat DTFT, DFT i Z. Przykład.
13. Splot dyskretny liniowy i splot cykliczny (kołowy). Przykłady
zastosowań.
14. Wprowadzenie do interpolacji i decymacji. Zasady i przykład
projektowania interpolatora i decymatora.
15. Kolokwium.

Literatura
[1] T.P. Zieliński: Cyfrowe przetwarzanie sygnałów. Od teorii do
zastosowań. WKŁ Warszawa 2005.
[2] J. Szabatin: Podstawy teorii sygnałów. WKŁ Warszawa 1982 i
następne wydania.
[3] J. Osiowski i J. Szabatin: Podstawy teorii obwodów. WNT
Warszawa,
tom I – 1992, tom II – 1993, tom III – 1995 i dalsze
wydania.
[4] A.V. Oppenheim, R.W. Schafer with J.R. Buck: Discrete-Time
Signal Processing. Prentice Hall 1999 – czytelnia WETI.
[5] J.G. Proakis and P.G. Manolakis: Digital Signal Processing.
Principles,
Algorithms and Applications. Prentice-Hall 1996 –
czytelnia WETI.
[6] S.W. Smith: Cyfrowe przetwarzanie sygnałów. Praktyczny
podręcznik
dla inżynierów i naukowców. Wydawnictwo BTC,
Warszawa 2007.
Oryginał – po angielsku – jest dostępny w
Internecie.

Wykład 1/1. Klasyfikacja
sygnałów
[1] Rozdz. 1 str. 1-13.
[2] Rozdz. 1 (4,5 strony).

Wykład 1/2. Analiza widmowa
sygnałów
deterministycznych.
Przekształcenie całkowe
Fouriera.
[1] Rozdz. 3 – Szereg Fouriera. Rozdz. 4 – Całkowe przekształcenie
Fouriera,
p. 4.1 i 4.3.
[2] Rozdz. 6, p. 6.1, 6.2, 6.3, 6.4, 6.6 i p. 6.7.1.
[3] Tom II, p. 5.1. Tom III, p. 9.1.3 A i B.
[6] str. 144 i str. 244-250.
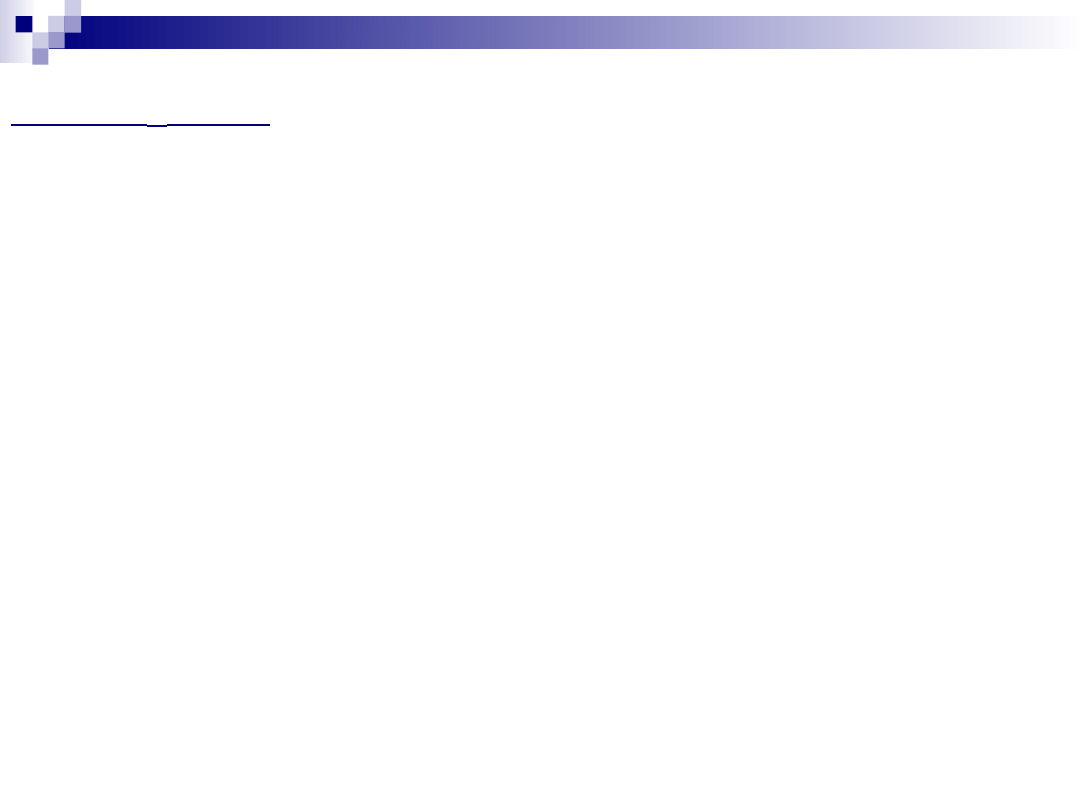
Dalej na tym wykładzie zmierzam do omówienia następujących systemów.
Dyskretno-czasowe przetwarzanie sygnałów
analogowych. System idealny.
C/D – konwerter czasu ciągłego na dyskretny (ang. continuous-to-discrete)
D/C – konwerter czasu dyskretnego na ciągły (ang. discrete-to-continuous)
T – takt zegara
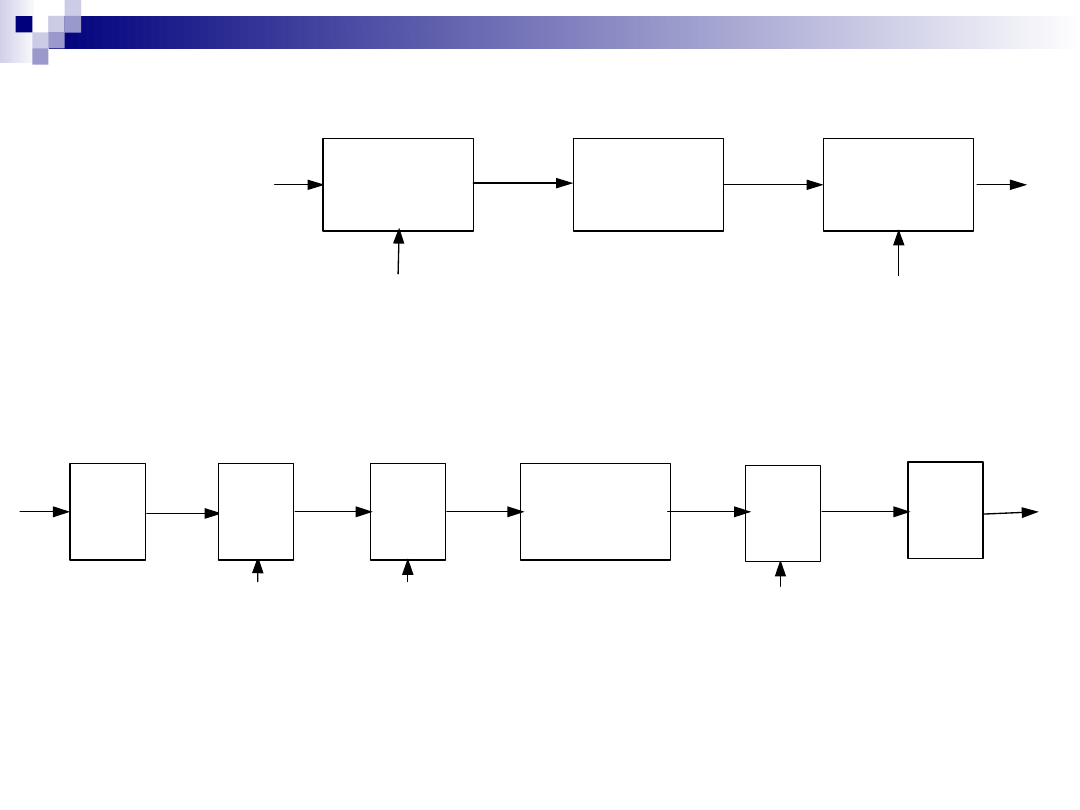
Cyfrowe przetwarzanie sygnałów analogowych. System
praktyczny.
AAF
A/D
System
cyfrowy
)
(t
x
c
)
(
ˆ t
y
r
T
T
)
(
0
t
x
]
[
ˆ n
y
S&H
RF
D/A
T
)
(t
x
a
]
[
ˆ n
x
)
(t
y
DA
C/D
System
dyskretno-
czasowy
D/C
)
(t
x
c
)
(t
y
r
T
T
]
[n
x
]
[n
y
AAF – filtr antyaliasingowy (ang. anti-aliasing filter)
S&H – próbkowanie i podtrzymywanie (ang. sample-and-hold)
A/D – przetwornik (konwerter) analogowo-cyfrowy (ang. analog-to-digital
converter)
D/A – przetwornik (konwerter) cyfrowo-analogowy (ang. digital-to-analog
converter)
RF – filtr rekonstrukcyjny (ang. reconstruction filter)
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
Wyszukiwarka
Podobne podstrony:
Twierdzenie o próbkowaniu
RBD W02
Tales twierdzenie
w02
RBD W02
Twierdzenie Talesa
Analiza Matematyczna Twierdzenia
Czas nie istnieje, to iluzja – twierdzą (niektórzy) fizycy cz 2
c cxx w02
10 2009 Twierdzenia mod n
Opis programu komputerowego Twierdzenie Pitagorasa-dowód i z, wrzut na chomika listopad, Informatyka
Twierdzenie sinusów i cosinusów
Algebra Liniowa 2 Definicje Twierdzenia Wzory Jurlewicz Skoczylas
Gazownictwo w02
inf2 w02
07 Twierdzenie o istnieniu i jednoznaczno
więcej podobnych podstron