
SZCZELINY
ZMĘCZENIOWE
Mateusz
Soja
IM gr.2 sem.3

WZROST SZCZELIN
ZMĘCZENIOWYCH
Cel kryteriów pękania można także sformułować
alternatywnie - dla znanego obciążenia zewnętrznego
wyznaczyć maksymalną dopuszczalną długość
szczeliny, tzw. długość krytyczną. Inną wspólną cechą
wszystkich przedstawionych kryteriów pękania jest to,
że nie uwzględniają one sposobu, w jaki szczelina o
początkowej długości lo osiąga swoją wartość
krytyczną. Tymczasem od dawna wiadomo, że mały
defekt istniejący w elemencie konstrukcyjnym w
normalnych warunkach pracy tego urządzenia może
okazać się stabilny przez cały okres eksploatacji
elementu, zaś przy zmianie tych warunków może
okazać się niebezpieczny już po krótkim okresie
eksploatacji. Typowym przykładem może tu być zmiana
zachowania szczeliny w zależności od rodzaju
obciążenia.

Zupełnie inny jest obraz zachowania się
szczeliny przy obciążeniu stałym, a inny przy
obciążeniu zmiennym (np. cyklicznie
zmiennym). Analiza licznych katastrof
mostowych w XIX wieku wykazała, że ich
przyczyną były obciążenia cyklicznie zmienne,
których amplituda nie przekraczała połowy
dopuszczalnego obciążenia statycznego.
Decydującą rolę w powstawaniu katastrof
odgrywała tu więc nie wielkość obciążenia, ale
jego zmienność w czasie. Przykład ten
wskazuje na znaczenie w mechanice obciążeń
cyklicznie zmiennych, szczególnie groźnych
dla bezpiecznej pracy konstrukcji, bądź jej
elementów.

Mówiąc o wzroście szczeliny mamy na
myśli jej stabilne podrastanie od
długości lo do długości krytycznej lkr,
osiągnięcie której przyjmuje się za
zniszczenie elementu. W mechanice
pękania zniszczenie pod wpływem
obciążeń zmiennych określa się
terminem „zniszczenie zmęczeniowe”.

Etap początkowy to nukleacja (inicjacja)
makroszczeliny, czyli szczeliny o długości
wystarczająco dużej, aby opis jej zachowania na
gruncie mechaniki ciała odkształcalnego był
wystarczająco dokładny. Uważa się, że obciążenie
cyklicznie zmienne powoduje kumulowanie się energii
w pobliżu wewnętrznych pustek bądź wtrąceń obcych.
To z kolei prowadzi do wzrostu i łączenia się tych
mikrodefektów, aż do utworzenia po pewnej liczbie
cykli Ni makropęknięcia, określanego mianem szczeliny
zmęczeniowej. Etap drugi to etap wzrostu (propagacji)
szczeliny zmęczeniowej od długości li do długości lkr.
Okres trwania tego etapu określony jest liczbą cykli Np.
Ostatni etap to niestabilny wzrost szczeliny,
utożsamiany ze zniszczeniem zmęczeniowym.
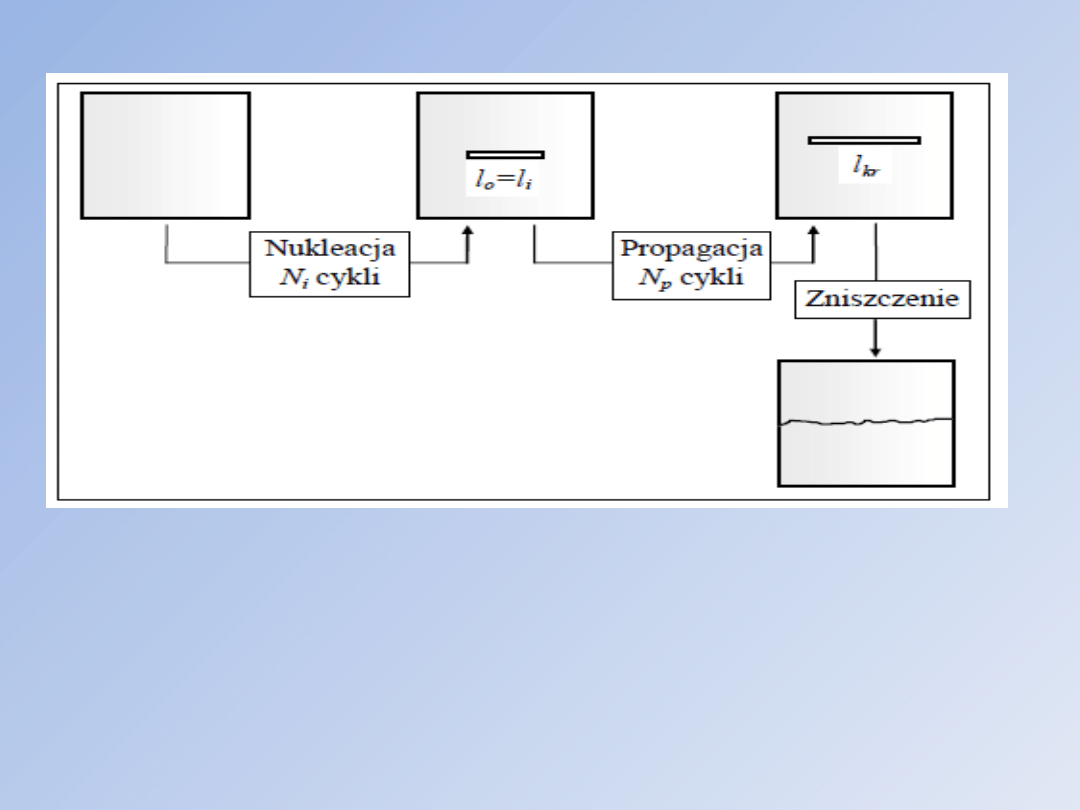
Rys. 7.1. Etapy rozwoju szczelin zmęczeniowych

Z powyższych rozważań wynika, że całkowita liczba cykli
obciążenia, jaką może bezpiecznie przenieść element
konstrukcyjny (zwana jest ona niekiedy okresem życia
elementu) jest sumą liczby cykli do inicjacji pęknięcia Ni i liczby
cykli odpowiadającej jego propagacji Np. Wartości liczbowe obu
tych wielkości zależą od wielu czynników, m.in. od rodzaju
materiału, parametrów charakteryzujących obciążenie oraz
geometrii szczeliny - trudno zatem podać
jakieś ogólne prawidłowości. Jest to tym trudniejsze, że
pierwszy etap – inicjacja szczeliny zmęczeniowej - jest wciąż
słabo poznany, tak od strony doświadczalnej, jak i teoretycznej.
W wielu jednak przypadkach przyjmuje się, że dla oceny
trwałości konstrukcji miarodajna jest faza propagacji szczeliny
zmęczeniowej - wystarcza zatem znajomość liczby cykli Np.

SZCZELINA ZMĘCZENIOWA PRZY
OBCIĄŻENIU
CYKLICZNYM O STAŁEJ AMPLITUDZIE
Rozważmy podstawowe dla praktyki inżynierskiej
zagadnienie wzrostu szczeliny przy obciążeniu
cyklicznie zmiennym o stałej amplitudzie.
Niezależnymi parametrami opisującymi naprężenia
wywołane tym obciążeniem są: naprężenie średnie
sm, amplituda naprężenia sa oraz częstotliwość w (w
celu określenia wielkości wyłącznie naprężenia
znajomość amplitudy nie jest konieczna). Możliwy jest
oczywiście inny dobór parametrów naprężeniowych –
przykładowo, mogą nimi być naprężenie maksymalne
smax i minimalne smin lub też zakres zmienności
naprężenia Ds i jeden z parametrów smax, smin, sm.
Często stosowanym parametrem jest tzw.
współczynnik asymetrii cyklu R. Może on zastąpić
jeden z wymienionych wyżej parametrów.
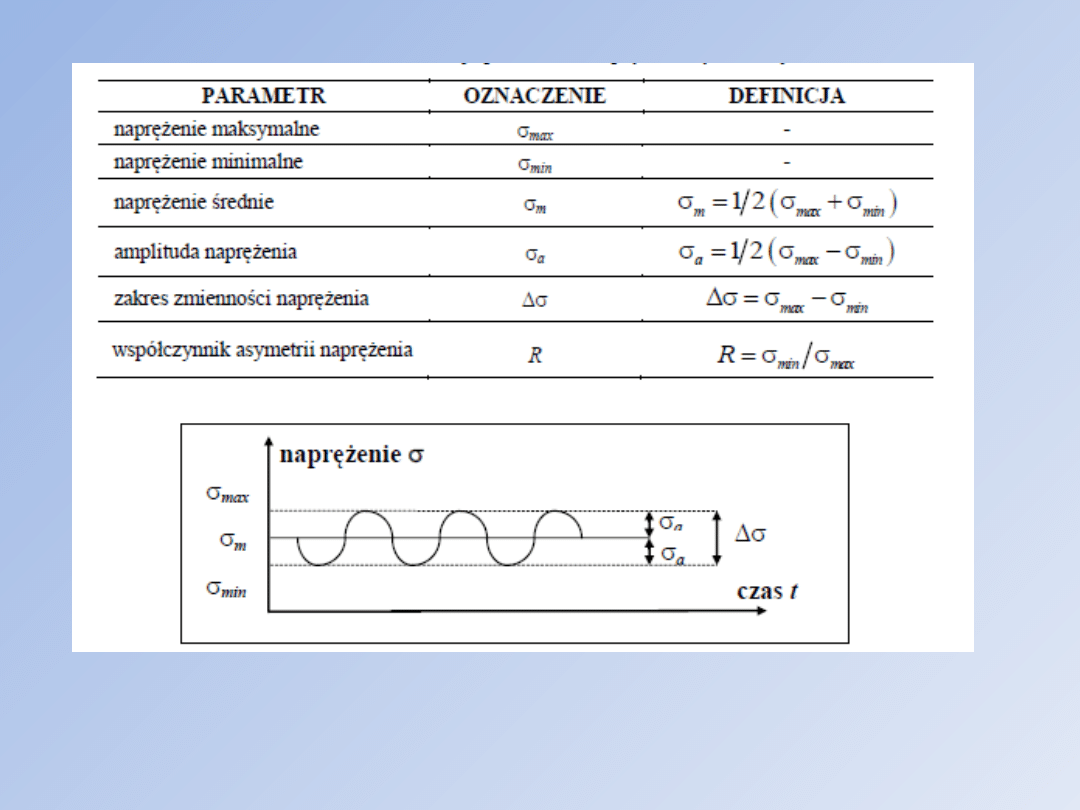
Tab. określenia i definicje parametrów naprężeń
zmęczeniowych.
Podstawowe parametry charakteryzujące wzrost szczelin zmęczeniowych.
Z określeń zamieszczonych w Tab. wynika
następujący związek między parametrami
zmęczeniowymi:
Wartość R = 0 oznacza cykl, w którym naprężenie
rośnie od wartości zerowej do wartości
maksymalnej, a następnie maleje ponownie do
zera - naprężenia nie zmieniają zatem znaku w
całym procesie obciążania elementu
konstrukcyjnego. Naprężenia zmieniające się
zgodnie z takim cyklem noszą nazwę tętniących.
Często występującym przypadkiem jest cykl o
współczynniku R = -1. W tym przypadku
naprężenia oscylują wokół naprężenia średniego
sm=0.
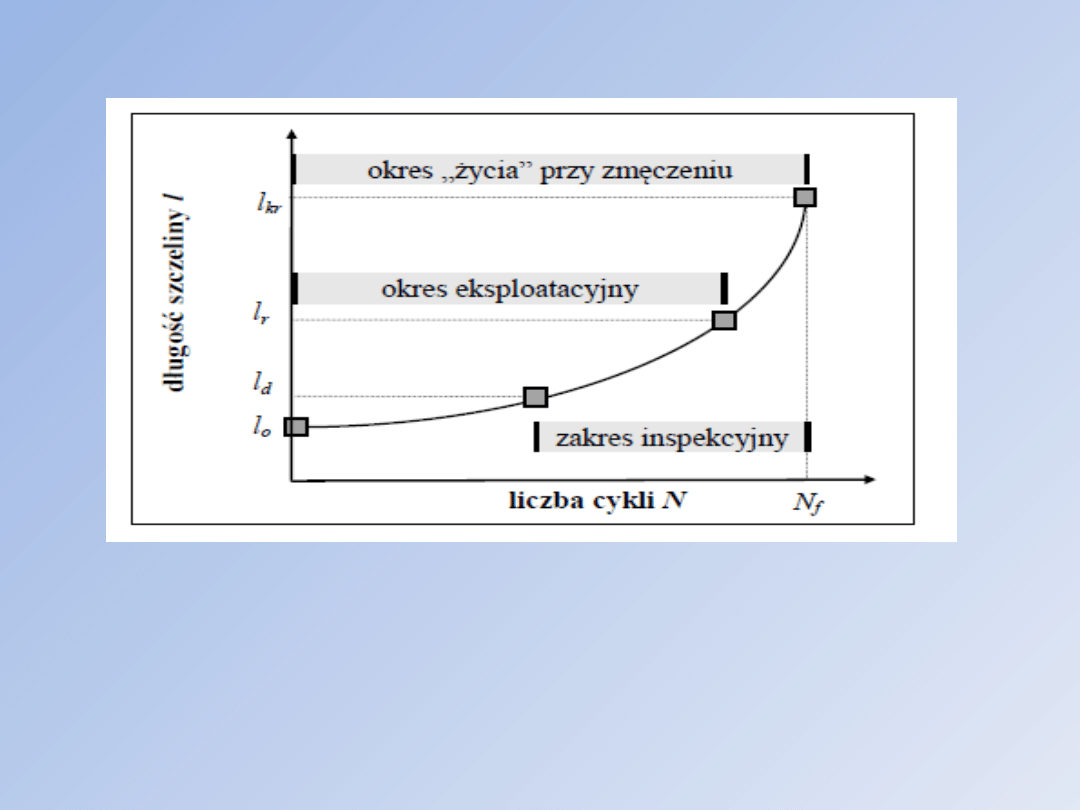
Przykładowa krzywa propagacji szczeliny zmęczeniowej (obciążenie o
stałej amplitudzie).

Rzeczywista początkowa długość szczeliny
oznaczona jest jako lo - musi ona być na tyle duża,
aby można do opisu zachowania szczeliny stosować
mechanikę pękania. W praktyce może się okazać, że
jest ona zbyt mała, aby można ją zidentyfikować
przy pomocy stosowanych metod i przyrządów
pomiarowych w badaniach nieniszczących.
Najmniejszą możliwą do wykrycia w ten sposób
długość szczeliny oznaczono jako ld - tę długość
będziemy rozumieć w dalszej analizie jako
początkową (ld wyznacza tzw. zakres inspekcyjny,
tzn. zakres, w którym możliwa jest doświadczalna
obserwacja szczeliny). Na skutek działającego
obciążenia zmiennego szczelina powoli podrasta od
długości początkowej aż do pewnej długości lr, kiedy
to następuje wyraźne przyspieszenie ruchu szczeliny.
Ten okres w pracy elementu ze szczeliną uważa się
za użyteczny okres eksploatacyjny.

Po osiągnięciu przez szczelinę długości
krytycznej następuje lawinowy,
niekontrolowany jej wzrost utożsamiany ze
zniszczeniem elementu - liczba cykli
odpowiadająca zniszczeniu wynosi Nf .
Wyznaczenie okresu życia elementu,
określonego liczbą cykli do zniszczenia Nf, jak
również krzywej l= l(N) stanowi
podstawowe zadanie analizy wzrostu szczeliny
przy zmęczeniu.

Krzywa prędkości wzrostu
szczeliny zmęczeniowej
Ogólnie akceptowanym poglądem jest ten, że mechanizm
wzrostu szczeliny przy obciążeniu zmiennym związany jest
z lokalnym polem naprężeń w pobliżu wierzchołka szczeliny.
Jeden z modeli wzrostu mówi, że nawet przy bardzo małych
obciążeniach, wskutek dużych koncentracji naprężeń w
okolicach wierzchołkowych ostrej szczeliny występują
odkształcenia plastyczne. Uzewnętrzniają się one w fazie
obciążania (wzrostu wartości obciążenia cyklicznego)
powstawaniem poślizgów płaszczyzn atomowych, w wyniku
których następuje powiększenie długości szczeliny oraz
stępienie (zaokrąglenie) jej wierzchołków. W fazie
odciążenia (zmniejszania wartości obciążenia cyklicznego)
zmniejsza się rozwarcie szczeliny, a wierzchołki ponownie
staja się ostre. W cyklu wzrostu obciążenia powyższy
proces rozpoczyna się od początku. Jest to proces
nieodwracalny na skutek trwałego zburzenia struktury
atomowej przy poślizgach plastycznych.
Korzystając z tego, że proces wzrostu
szczeliny zmęczeniowej związany jest z
lokalnym spiętrzeniem naprężeń - można
przyjąć za uzasadnione powiązanie wzrostu
szczeliny z wielkością współczynnika
intensywności naprężeń (WIN) K -
podstawowego parametru wykorzystywanego
w mechanice pękania, znanego dla ogromnej
ilości konfiguracji ciał, szczelin i obciążeń.
Przypomnijmy, że WIN można dla dowolnej
konfiguracji zapisać w postaci:
gdzie β jest współczynnikiem (liczbowym lub
funkcyjnym) związanym ze skończonymi wymiarami
ciała, zaś σ oznacza przyłożone obciążenie.
Wprowadzony poprzednio jako parametr sterujący
procesem zniszczenia zakres zmienności naprężenia
można zastąpić zakresem zmienności WIN.
Uwzględniając, że dla poszczególnego cyklu
określonego zmiennością naprężenia między σ min
a σ max zachodzą zależności:
zakres zmienności WIN wyraża się równaniem:
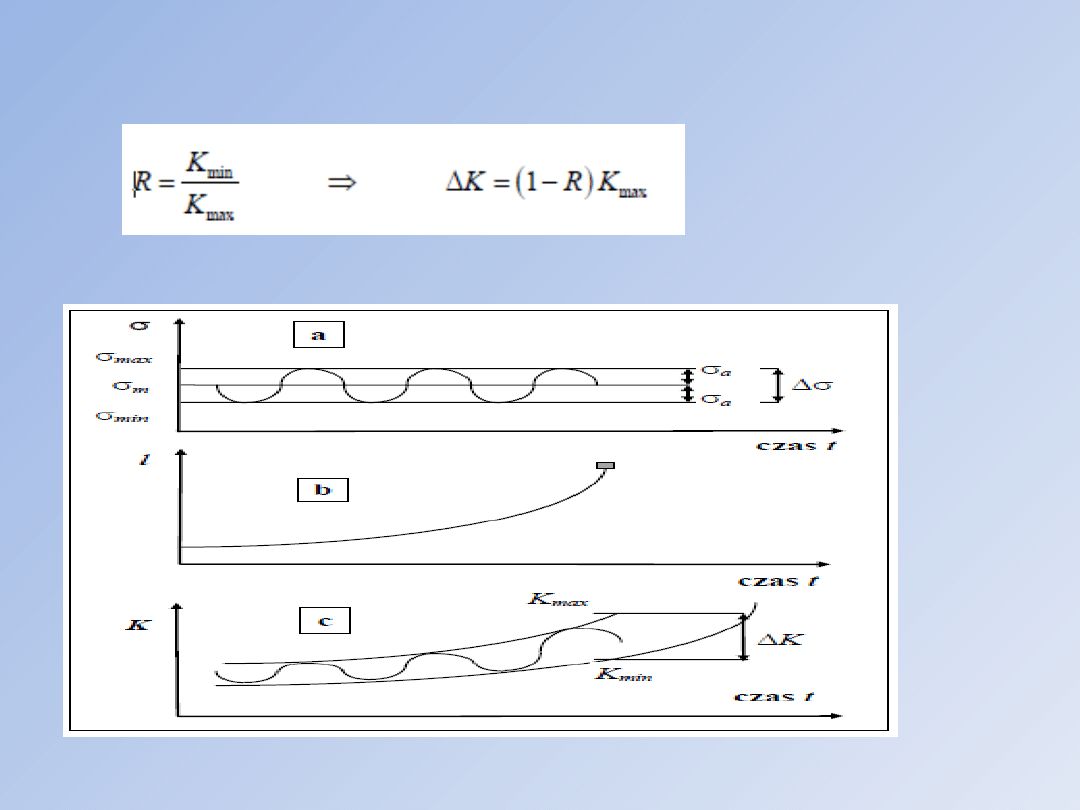
zaś współczynnik asymetrii cyklu R wynosi:
Interpretację geometryczną zakresu zmienności WIN pokazano
poniżej
Parametry stosowane w opisie wzrostu szczeliny zmęczeniowej: a) obciążenie zmienne, b) krzywa wzrostu szczeliny,
c) zakres zmienności współczynnika intensywności naprężeń
Prędkość propagacji szczeliny zmęczeniowej
definiuje się jako przyrost długości szczeliny
przypadający na jeden cykl - wyraża się ona
zatem pochodną dl / dN o wymiarze [mm/cykl].
Korzystając ze zdefiniowanych uprzednio
niezależnych parametrów sterujących
procesem zmęczenia równanie prędkości
propagacji szczeliny zmęczeniowej można
zapisać w postaci:

Można wykazać, że funkcja f jest funkcją rosnącą ze
względu na oba argumenty. Otwarte pozostaje
pytanie o postać tej funkcji. Należy wyraźnie
powiedzieć, że jak dotychczas nie udało się jej
znaleźć funkcji na drodze
teoretycznej. Jest to związane z zasadniczymi
trudnościami wynikającymi z konieczności
powiązania makroskopowych parametrów
propagacji szczeliny, tzn. DK i R, z mikroskopowymi
- zachodzącymi na poziomie płaszczyzn atomowych
procesami poślizgów, odpowiedzialnymi za
nieodwracalny wzrost szczeliny przy obciążeniu
zmęczeniowym. Pozostaje w tej sytuacji tylko droga
eksperymentalna, w oparciu o którą można pokusić
się o pewne uogólnienia prowadzące do czysto
empirycznych formuł opisujących funkcję o ogólnej
postaci wyrażonej równaniem.

W mechanice pękania do opisu wzrostu
szczelin zmęczeniowych przyjęło się
używać właśnie krzywą prędkości (a nie
krzywą wzrostu długości l(N)) choć nie
uzyskuje się jej wprost z doświadczenia,
ale poprzez przetworzenie krzywej
wzrostu. Poniżej przedstawione będą
podstawowe procedury służące
wyznaczeniu obu krzywych.
Krzywą wzrostu szczeliny zmęczeniowej uzyskuje się
podczas próby
zmęczeniowej przeprowadzonej na dowolnej próbce o
znanej wartości
współczynnika b. Z reguły jest to próbka w kształcie
płaskiej tarczy prostokątnej z krótką, ostro zakończoną
szczeliną centralną lub próbka kompaktowa. Obciążenie
zewnętrzne jest przeważnie sinusoidalnie zmienne o
stałej amplitudzie i częstotliwości. W trakcie testu
rejestrowana jest bieżąca długość szczeliny w funkcji
liczby cykli obciążenia Jest to cała informacja uzyskiwana
doświadczalnie i dopiero jej przetworzenie pozwala
określić funkcję. Procedurę tę prześledzimy na
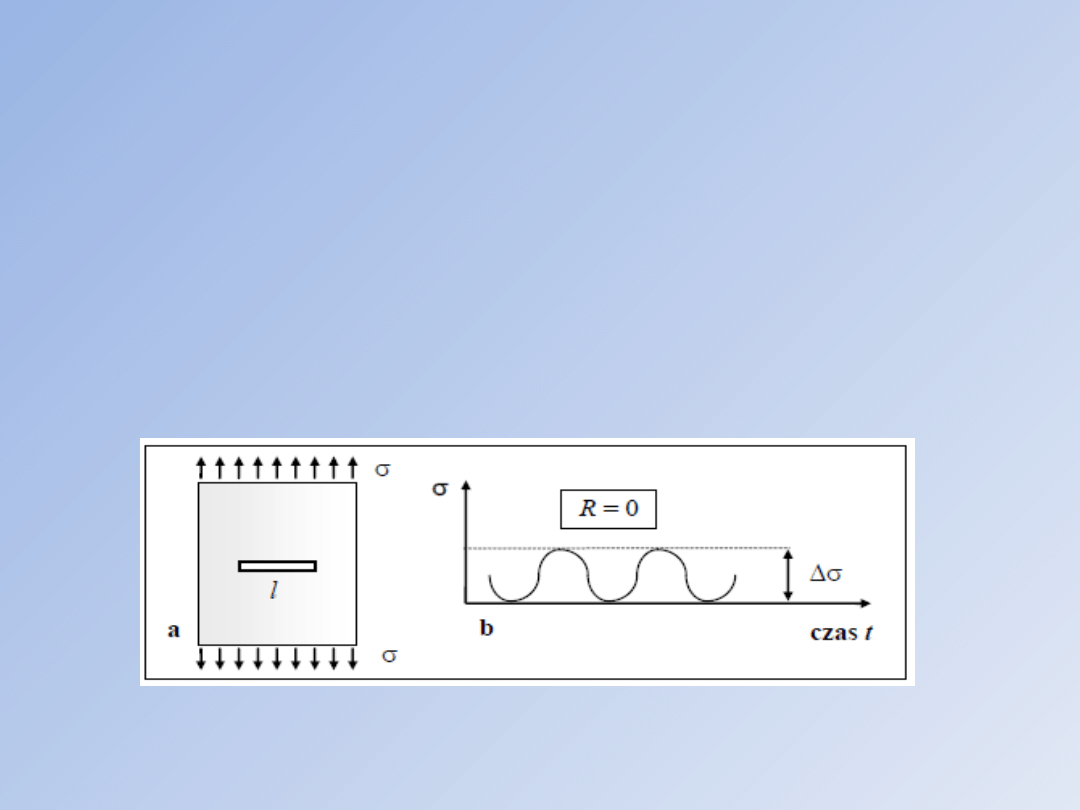
przykładzie, który dotyczy próbki ze szczeliną centralną,
poddanej obciążeniu tętniącemu o stałej amplitudzie.
Parametry typowej próby zmęczeniowej: a) próbka testowa, b) obciążenie tętniące
Równania prędkości propagacji
szczeliny zmęczeniowej
Wszystkie te równania są czysto empirycznymi i
wynikają wyłącznie z procedur matematycznych
dopasowujących linię ciągłą o równaniu
analitycznym do dyskretnych wyników pomiarów
(z reguły wykorzystywana jest metoda
najmniejszych kwadratów). Zajmijmy się najpierw
II, liniową fazą na wykresie log (dl/dN) vs. log DK.
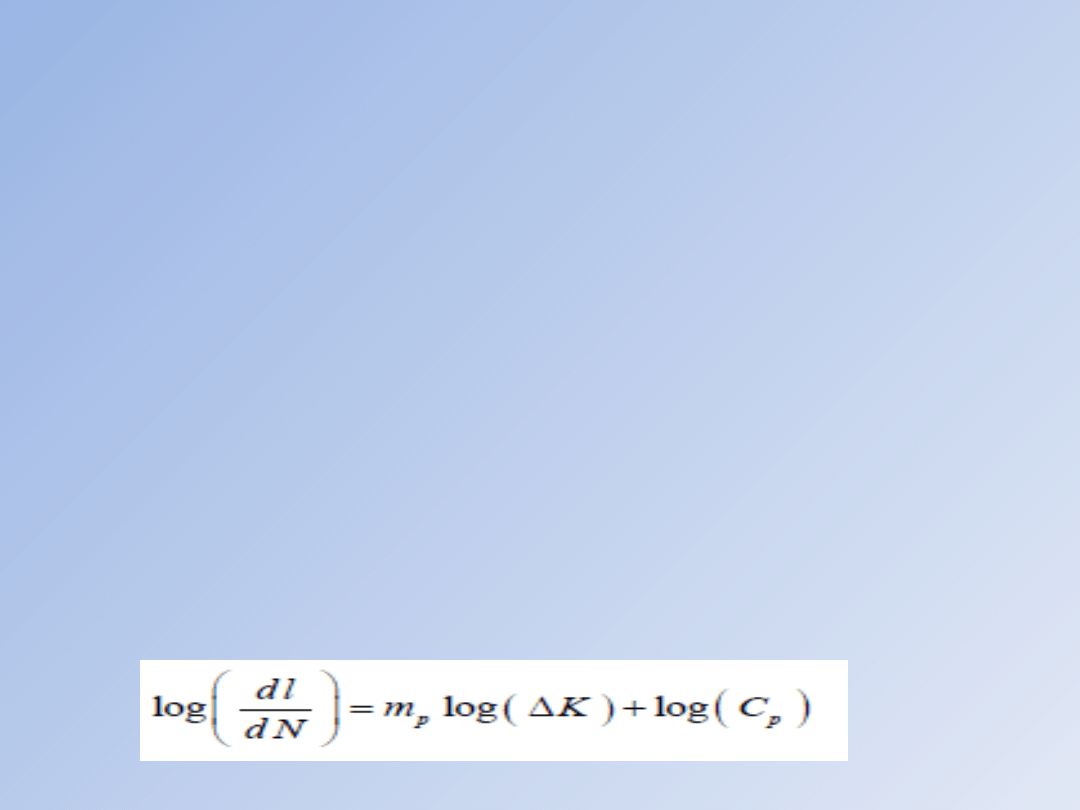
Dla określonego jednego współczynnika asymetrii
cyklu R, korzystając z ogólnego równania prostej
y=mp x +b, gdzie y = log(dl /dN); x = log (DK)
możemy równanie tej prostej zapisać w postaci:
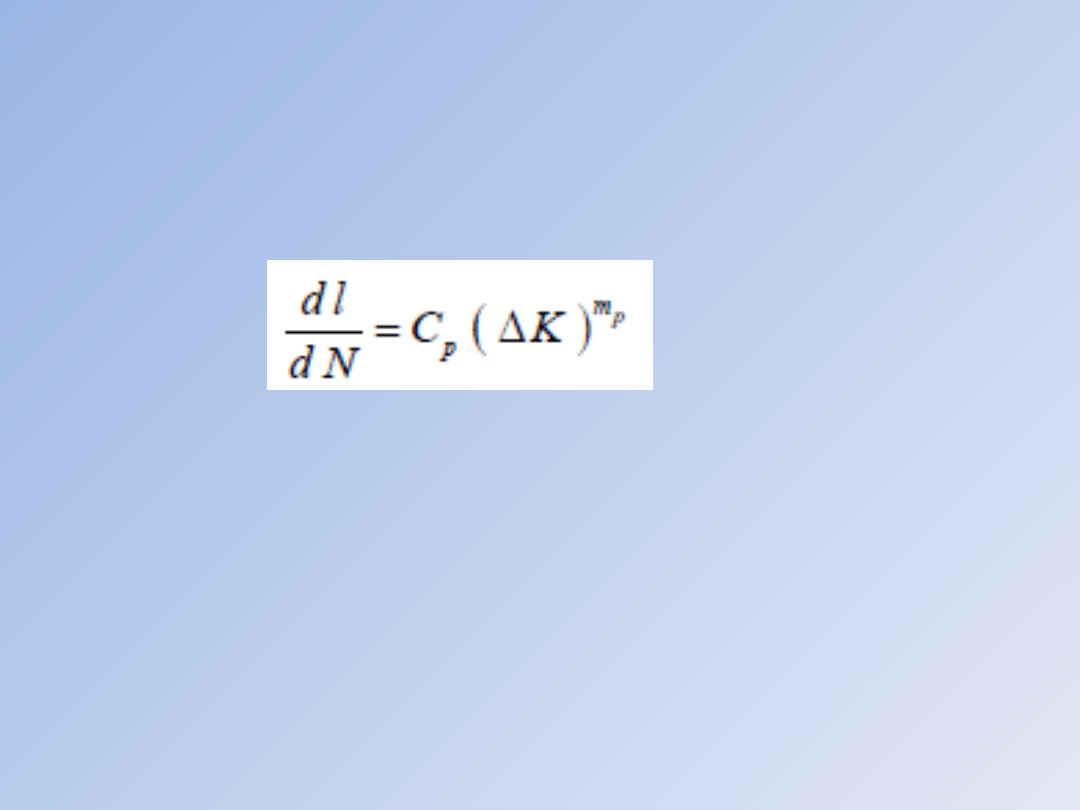
Uwzględniając własności funkcji
logarytmicznej, po prostych
przekształceniach otrzymamy
równanie w postaci:
Równanie zostało wprowadzone do literatury wspólnie przez Parisa i
Erdogana, ale znane jest powszechnie pod nazwą „równanie Parisa”. Stałe
mp i Cp wyznacza się z danych doświadczalnych - wystarcza oczywiście
znajomość dwóch punktów (DK, dl/dN ), ale lepsze efekty daje
wyznaczenie stałych z większej ilości punktów pomiarowych. Stała mp
zawiera się dla większości materiałów w zakresie 3÷5, stała Cp silniej
zależy od materiału, a co więcej zależy od jednostek w jakich prowadzone
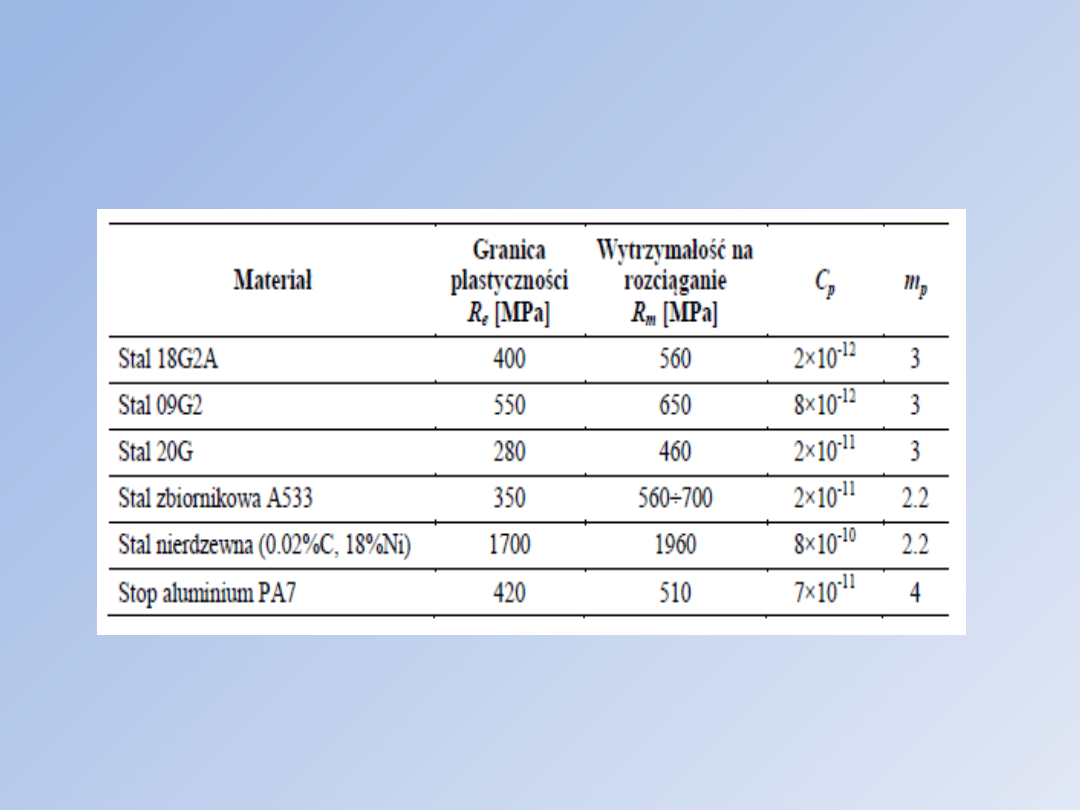
są obliczenia. Orientacyjne wartości tych stałych dla niektórych
materiałów zestawiono w tab. Dane dotyczą cyklu o współczynniku
asymetrii R=0; prędkość propagacji szczeliny dl/dN wyrażona jest w
mm/cykl, zaś zakres zmienności DK w MPa m1/2.
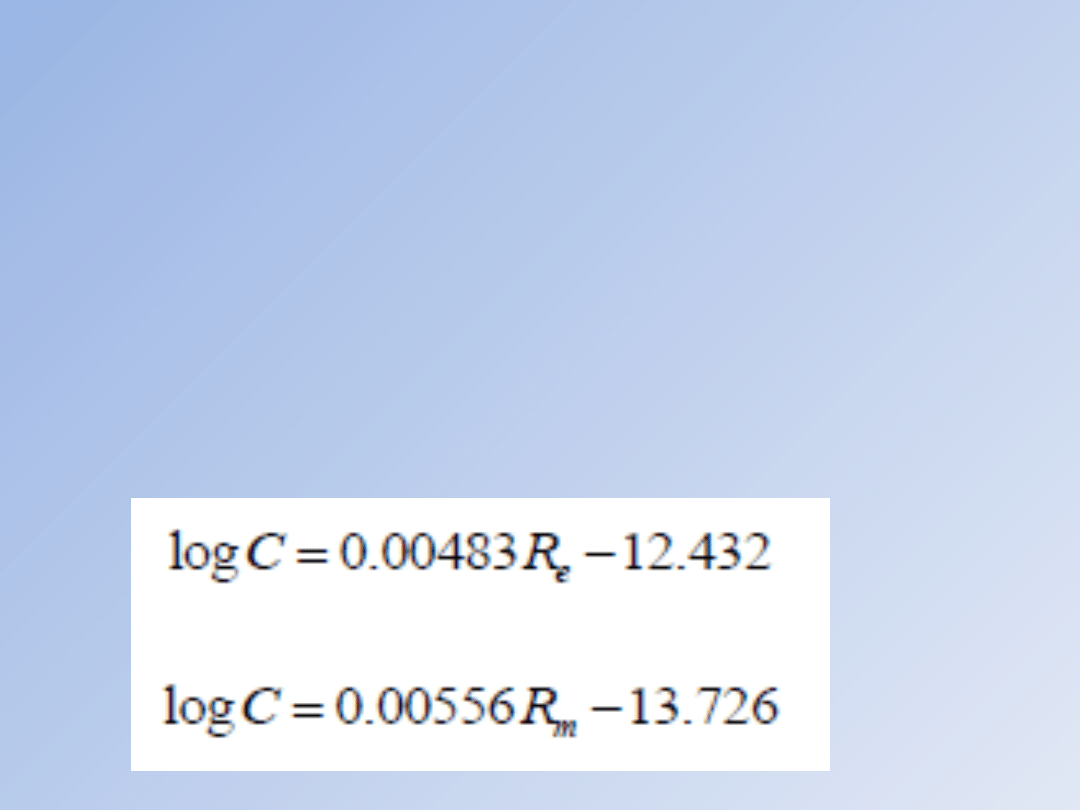
Istnieją proste wzory empiryczne dla określonych
klas materiałów, które wiążą stałe m i C w równaniu
Parisa z wartościami granicy plastyczności Re i
wytrzymałości na rozciąganie Rm. Pozwalają one
określić choćby szacunkowo m i C, w przypadku gdy
zachodzi konieczność wykonania obliczeń
zmęczeniowych, a brak jest danych
doświadczalnych dotyczących materiału. Do tej
kategorii należą np. relacje odnoszące się do dużej
grupy stali, zaproponowane przez Takashimę - mają
one następujące postaci:
Tab. Orientacyjne wartości stałych w
równania Parisa
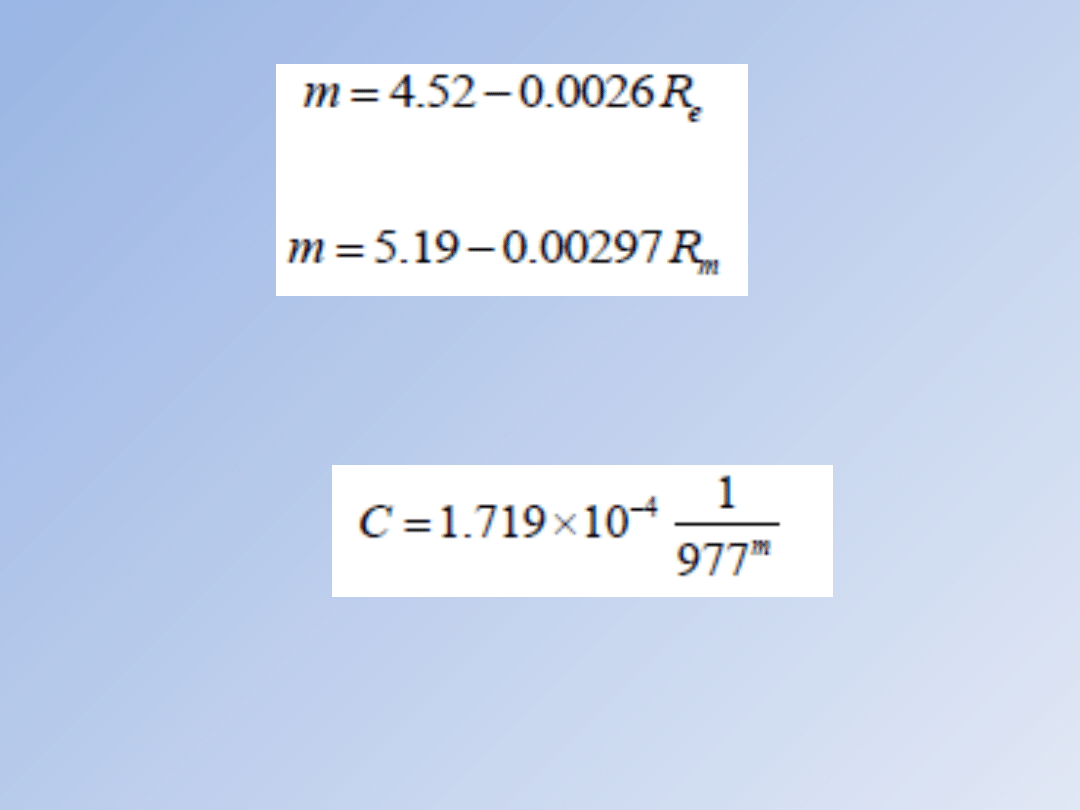
Rombari określił równanie, które dość precyzyjnie pozwala określić stałą
C dla
większości stali w oparciu o znaną wartość stałej m - odpowiednia
zależność ma
postać:
Równanie prawdziwe jest w przedziale mÎ<5, 11> oraz RÎ<0, 0.5>, przy
czym zakres zmienności DK wyrażony jest w [N mm-3/2]. Jak
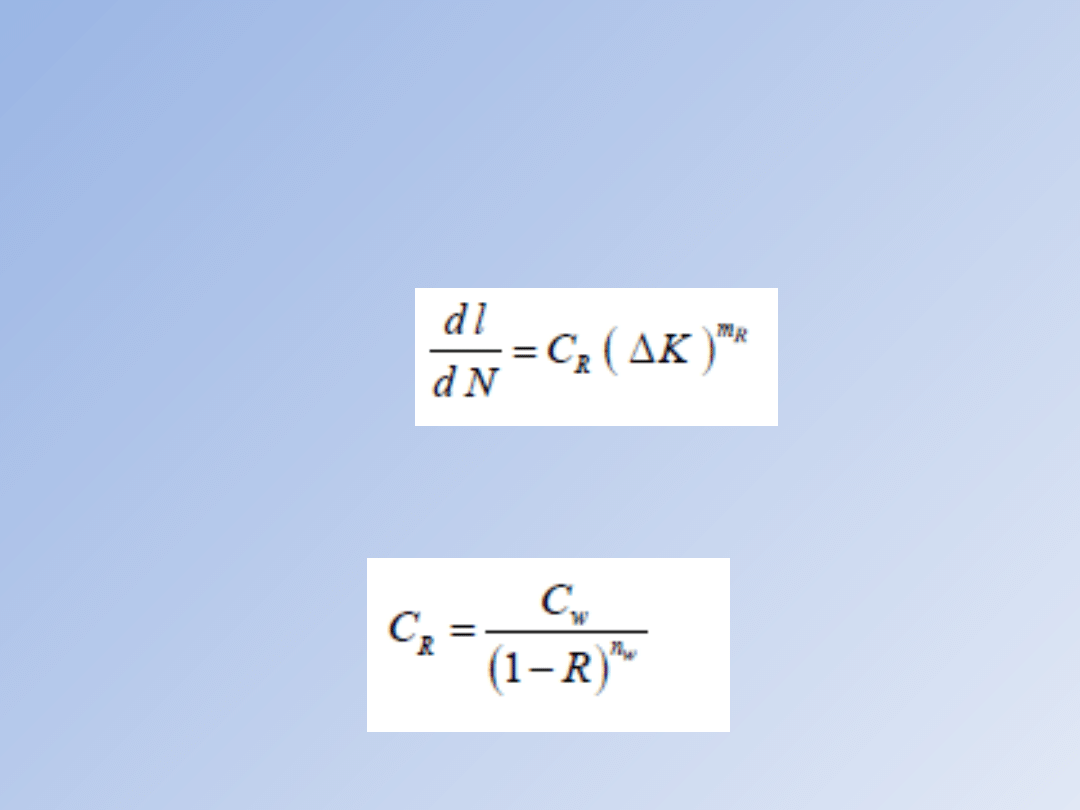
wspomniano wcześniej, wykresy prędkości propagacji szczeliny dla
różnych wartości R są równoległe w liniowym ich zakresie - muszą
zatem mieć identyczne współczynniki nachylenia, czyli zarazem m, a
różne współczynniki przesunięcia, czyli C. Wynika stąd, że uogólnieniem
równania Parisa w postaci jest równanie:
Dla wielu materiałów zależność CR można z wystarczającą
dokładnością opisać
równaniem w postaci:
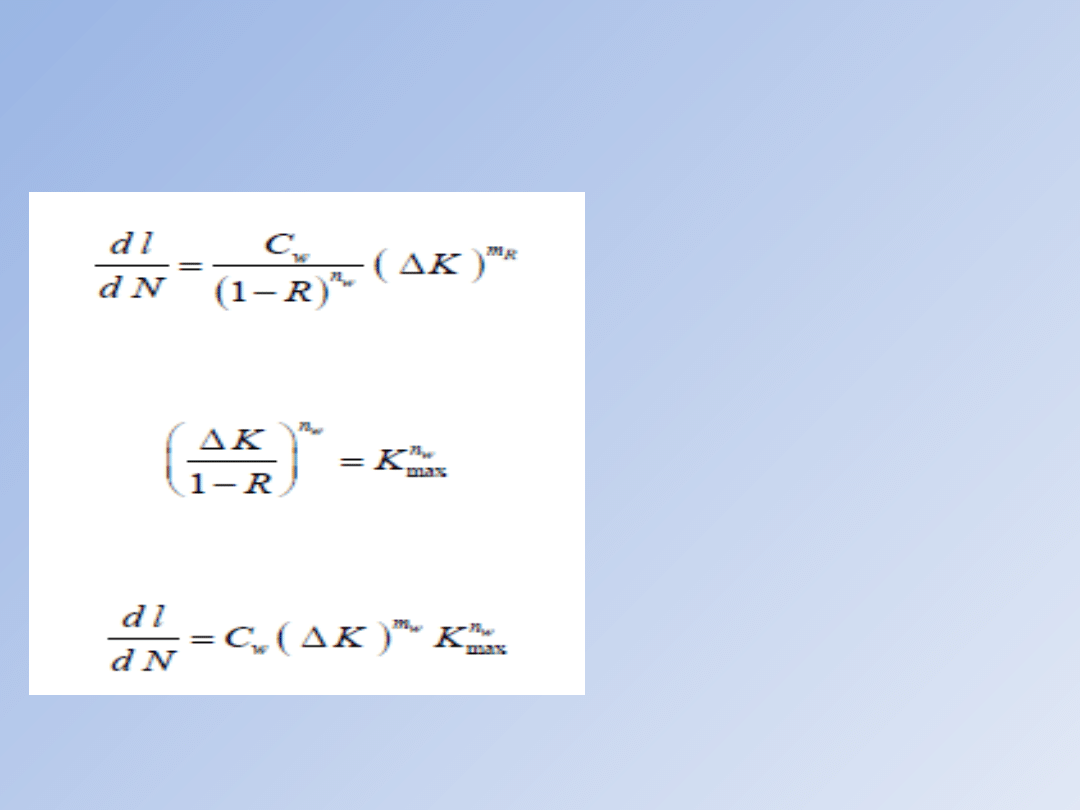
Stała Cw jest równa stałej CR dla testu o współczynniku asymetrii
R=0. Po wstawieniu otrzymujemy równanie prędkości szczeliny w
postaci:
Korzystając w równania można dokonać następującego
podstawienia:
a po dalszych przekształceniach można otrzymać
zamiast równanie:
gdzie mw=mR-nw. Równanie nosi nazwę
równania Walkera. Sposób wyznaczania
stałych w tym równaniu. Zarówno równanie
Parisa, jak i jego proste rozwinięcie - równanie
Walkera odnoszą się wyłącznie do liniowego
zakresu wykresu log(dl/dN ) vs. log Δ K. Z
myślą o opisie nieliniowej, III fazy tego
wykresu, charakteryzującej się tym, że dla Δ K
= ΔKc = Kc (1-R) prędkość wzrostu szczeliny
zmierza do wartości nieskończenie dużej, tzn.:
Forman i in. zaproponowali następującą adaptację
równania Parisa:
Wielkość Kc oznacza odporność na pękanie w
konkretnych warunkach obciążenia. W przypadku
braku odpowiednich danych należy wykorzystać
KIc,
pamiętając o zgłoszonych wcześniej
zastrzeżeniach co do poprawności takiego
postępowania. Równanie Formana pozwala
wyznaczyć prędkość wzrostu pęknięcia przy
dowolnym współczynniku asymetrii cyklu R.
Duża grupa równań dotyczy początkowej fazy na
krzywej prędkości propagacji szczeliny. Wszystkie one
zawierają jako jeden z parametrów wartość progową
zakresu zmienności współczynnika intensywności
naprężeń Δ Kth. Donahue i in. zaproponowali relację:
Kluczowe znaczenie dla możliwości wykorzystania
tego równania ma znajomość wartości progowej Δ Kth
. Spośród bardzo dużej ilości propozycji wybierzmy te,
które stosowane są najczęściej. Należy do nich wzór
Klesnila i Lukaša w postaci:
gdzie Δ Kth0 to wartość progowa dla cyklu charakteryzującego się
współczynnikiem
R=0, zaśγjest parametrem materiałowym, zawierającym się w
zakresie 0.5÷1.0.
Za relacje dające dobre oszacowanie wartości progowej dla różnych
gatunków
stali i współczynnika asymetrii R=0 uważa się wzory
zaproponowane przez
Vosikovsky’ego, wiążące Δ Kth z granicą plastyczności Re i
wytrzymałością na
rozciąganie Rm . Mają one następujące postaci:
W przypadku cykli o współczynniku R =/=0 można korzystać z równania:
gdzie:
Bardzo dobre równanie opisujące wartość progową dla stopów
aluminium podał
Mackay, ma ono postać:
Szerszą prezentację propozycji dotyczących wyznaczania ΔKth
można znaleźć
w. Na zakończenie wspomnijmy jeszcze o tzw. uogólnionym
prawie propagacji
szczeliny zmęczeniowej, które pozwala opisać
charakterystyczny kształt krzywej
pokazanej na Rys. w całym jej zakresie. Zgodnie z propozycją
Erdogana i
Ratwani’ego prędkość propagacji szczeliny wyraża się
równaniem:
gdzie:

Zaś C, m i n są stałymi materiałowymi, które należy
wyznaczyć z danych doświadczalnych. Czynnik (1+β)m
uwzględnia wpływ naprężenia średniego i amplitudy
naprężenia (patrz Tab.) na propagację szczeliny
zmęczeniowej, czynnik [Kc-(1+β)ΔK] bierze pod uwagę
dane eksperymentalne dotyczące prędkości przy
wysokich poziomach naprężenia, zaś czynnik (ΔK –
ΔKth)n odpowiedzialny jest za opis pierwszej I fazy
wzrostu szczeliny po przekroczeniu wartości progowej
ΔKth .
Równanie dobrze pasujedo wyników doświadczalnych w
zakresie prędkości 2.5×10-7÷2.5×10-1 mm/cykl.
Czas życia elementu ze
szczeliną zmęczeniową
Powiedziano już uprzednio, że celem analizy zagadnienia
wzrostu szczelin zmęczeniowych jest wyznaczenie
krzywej propagacji szczeliny oraz określenie liczby cykli,
po której dochodzi do zniszczenia elementu. Liczba ta,
oznaczona symbolem Nf określa tzw. czas życia
elementu ze szczeliną zmęczeniową. przypadku
omawianych tu obciążeń cyklicznych o stałej amplitudzie
czas życia można wyznaczyć stosunkowo prosto, pod
warunkiem, że znane są parametry obciążenia oraz
postać współczynnika intensywności naprężeń, a w
zasadzie współczynnika skończonych wymiarów ciała b -
z reguły określonego funkcyjnie lub tabelarycznie. Z
równania tego wynika relacja:
Stąd, po scałkowaniu otrzymuje się liczbę cykli do zniszczenia lub liczbę
określoną wymaganiami kontrolnymi w postaci:
gdzie: lo oznacza założoną lub stwierdzoną w elemencie długość
początkową
szczeliny, a lk długość końcową szczeliny, często utożsamianą z
długością
krytyczną lkr wyznaczaną w oparciu o jedno z kryteriów pękania.
Biorąc pod uwagę, że funkcje f(ΔK, R) mogą mieć dość kłopotliwe
obliczeniowo postacie, a także to, że tę samą uwagę można odnieść
do
współczynnika β, należy mieć świadomość występujących przy
wyznaczaniu Nf
trudności rachunkowych - z reguły konieczne jest zastosowanie
procedur
całkowania numerycznego. Stosują stosunkowo najprostsze równanie
Parisa,
z równania po uwzględnieniu, otrzymujemy:
Nawet w tak elementarnym przypadku, jak
obciążenie cykliczne o stałej amplitudzie Δσ
(niezależnej od długości szczeliny) działające na
pasmo prostokątne o skończonych wymiarach ze
szczeliną centralną obliczenia w myśl równania
muszą być wykonywane numerycznie. Decyduje o
tym wielomianowa postać współczynnika β = β
(l/W). W przypadku konieczności wykonania
szybkich obliczeń, w warunkach braku
natychmiastowego dostępu do mikrokomputera z
odpowiednim oprogramowaniem, można zamiast
wzoru całkowego wykorzystać wzór przybliżony w
postaci:

Powiedzmy jednak wyraźnie -
przedstawiony tu szczegółowo przypadek
obciążeń cyklicznych o stałej
amplitudzie, jakkolwiek ważny z
praktycznego punktu widzenia,
występuje w pracy konstrukcji
inżynierskich rzadziej niż przypadek
obciążeń zmiennych o amplitudzie
zmiennej. Przypadek ten będzie
przedstawiony w poniżej

SZCZELINA ZMĘCZENIOWA PRZY
OBCIĄŻENIU
CYKLICZNYM O ZMIENNEJ AMPLITUDZIE
Przypadek obciążeń cyklicznych, w których amplituda zmienia się w pewien
określony sposób, lub też zmiany te są losowe, jest przypadkiem o dużym
znaczeniu praktycznym, gdyż takim obciążeniom podlega wiele konstrukcji, od
których wymaga się absolutnej niezawodności. Można w tym kontekście
wymienić choćby konstrukcje lotnicze, narażone przede wszystkim właśnie na
obciążenia zmęczeniowe (wibracje od silników, drgania skrzydeł itd.). Z punktu
widzenia analizy teoretycznej zagadnienie to jest znacznie bardziej złożone od
problemu zniszczenia zmęczeniowego przy stałej amplitudzie - to sprawia, że
liczba relacji opisujących to zagadnienie ilościowo, jest nieporównywalnie
mniejsza niż w tym drugim przypadku.
Doświadczenia prowadzone jeszcze w latach sześćdziesiątych wykazały, że
nawet pojedynczy cykl przeciążający (nazwijmy go popularnie „pikiem”)
występujący w obciążeniu cyklicznym o stałej amplitudzie całkowicie zmienia
przebieg krzywej l=l(N). Każdy cykl przeciążający w dowolnym widmie
(programie) obciążenia powoduje opóźnienie (niekiedy nawet zatrzymanie)
wzrostu szczeliny, w tym sensie, że prędkość wzrostu szczeliny po każdym
cyklu przeciążającym jest mniejsza niżby była dla cyklu o stałej amplitudzie.

Pokazano to na rysunku zaczerpniętym z pracy, który przedstawia
schematycznie kolejne etapy wpływu przeciążenia o wartości s2
występującego w cyklu podstawowym o amplitudzie s1 na przyrost
długości szczeliny zmęczeniowej oraz prędkość jej propagacji
Symbol Nd oznacza ten okres wzrostu szczeliny (wyrażony liczbą
cykli), w którym utrzymuje się wpływ efektu przeciążenia na
zachowanie szczeliny wywołane cyklem podstawowym. W
przypadku cykli o przeciążeniu zarówno dodatnim (rozciąganie),
jak i ujemnym (ściskanie) zjawisko opóźnienia wzrostu pęknięcia
również jest obserwowane, choć w znacznie mniejszym stopniu.
Chcąc wyjaśnić mechanizm powstawania efektu opóźnienia należy
odwołać się do analizy obszaru leżącego przed czołem
(wierzchołkiem) szczeliny. Nagłemu wzrostowi naprężenia w cyklu
przeciążającym towarzyszy powstanie przed czołem szczeliny
dużej strefy plastycznej (strefa umocnienia plastycznego). Po
odciążeniu, sprężysty materiał otaczający tę strefę staje się swego
rodzaju klamrą, powodującą powstanie w strefie plastycznej
naprężeń własnych, ściskających. Podrastająca szczelina
przekraczając granicę strefy plastycznej narażona jest na działanie
tych naprężeń ściskających - ich skutkiem jest efekt zamykania się
powierzchni szczeliny. Prędkość wzrostu szczeliny ulega zatem po
jej wejściu w strefę plastyczną zmniejszeniu - mówimy wtedy o
efekcie opóźnienia. Po opuszczeniu strefy plastycznej szczelina
ponownie się otwiera i kolejne stałe cykle obciążenia wywołują
dalszy jej wzrost.
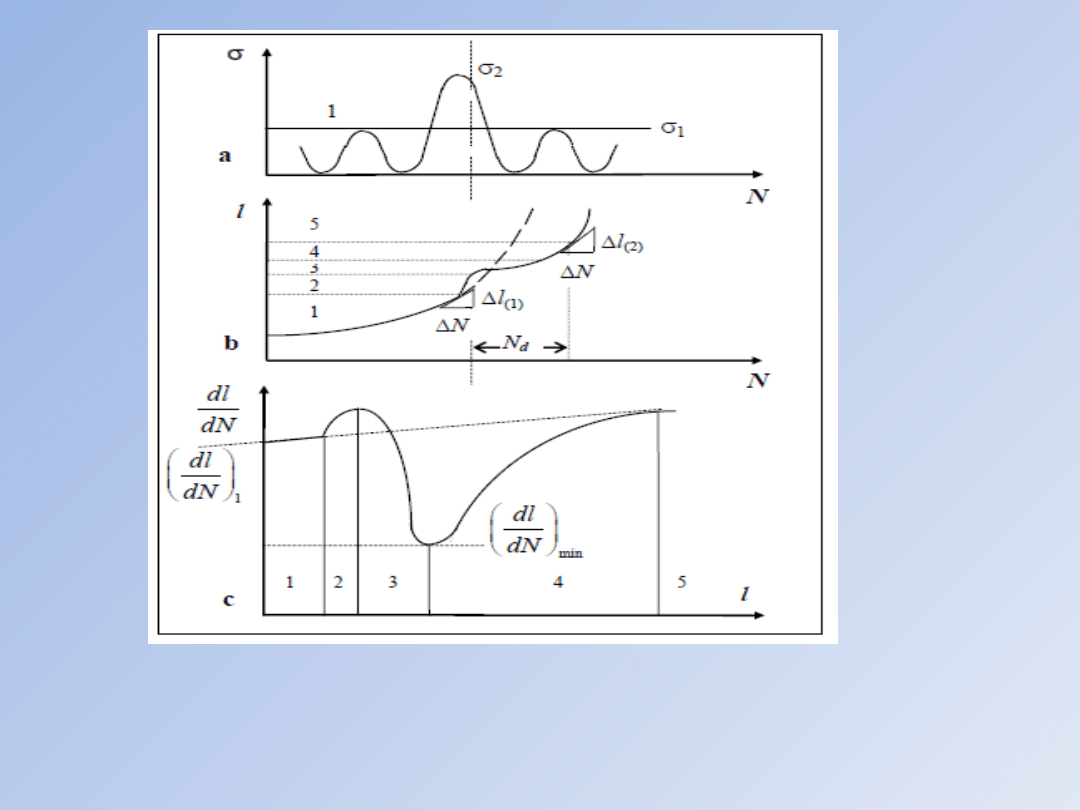
Efekt pojedynczego cyklu przeciążającego: a) naprężenie, b) krzywa wzrostu
szczeliny, c) krzywa prędkości szczeliny

Istnienie efektu opóźnienia sprawia, że wyznaczenie
czasu życia elementu konstrukcyjnego ze szczeliną,
poddanego działaniu obciążenia cyklicznego o zmiennej
amplitudzie, w oparciu o prostą procedurę polegającą na
podzieleniu widma obciążenia na sekwencje o stałej
amplitudzie, obliczeniu czasu życia elementu dla każdej
z sekwencji, a wreszcie zsumowaniu tych cząstkowych
czasów - a zatem procedury pomijającej efekt
opóźnienia - prowadzi do dolnego oszacowania
rzeczywistego okresu życia, który jest większy. Z punktu
widzenia bezpieczeństwa jest to korzystne, ale zarazem
niedoszacowanie okresu życia może być tak duże, że aż
trudne do zaakceptowania, szczególnie wówczas, gdy w
oparciu tak uzyskany wynik następuje wyłączenie
konstrukcji z eksploatacji, co wiąże się ze stratami
finansowymi. Spośród wielu modeli ilościowych
pomyślanych do obliczeń czasu życia elementów przy
obciążeniach cyklicznych o zmiennych amplitudach
wymieńmy tutaj dwa - oba chętnie i często stosowane,
przede wszystkim ze względu na swoją prostotę.
Pierwszy z nich to model zaproponowany przez
Barsoma. Może on być stosowany dla obciążeń, w
których widmie losowe przeciążenia występują często i
mieszczą się w dość wąskim paśmie zmienności. W
modelu tym przyjmuje się, że średnia prędkość wzrostu
szczeliny zmęczeniowej przy losowo zmieniającym się
obciążeniu o zmiennej amplitudzie jest w przybliżeniu
równa prędkości wzrostu szczeliny zmęczeniowej przy
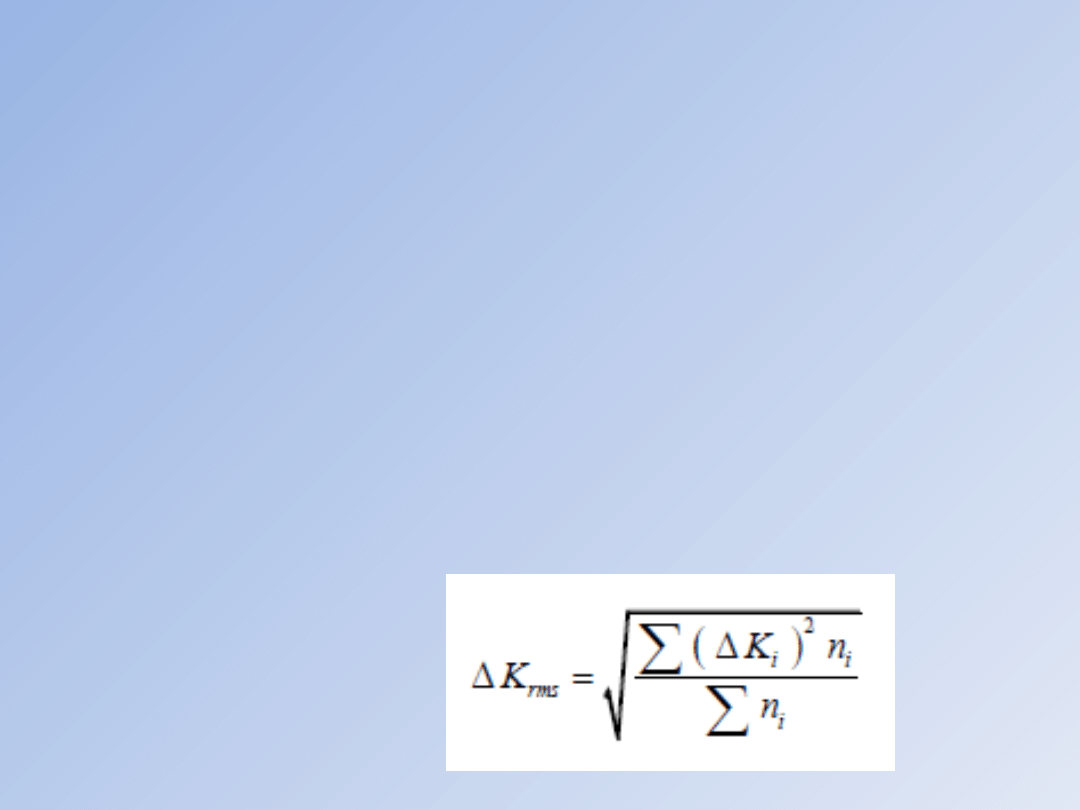
obciążeniu o stałej amplitudzie. Istota modelu
sprowadza się do tego, że prędkość wzrostu pęknięcia
można nadal opisywać przy pomocy równań dla cyklu o
stałej amplitudzie - po zastąpieniu zakresu zmienności
współczynnika intensywności naprężeń ΔK tzw.
wartością skuteczną tego współczynnika ΔKrms (ang.
root-meansquare value) określoną równaniem w
postaci:
gdzie: ni oznacza liczbę amplitud obciążenia,
którym odpowiadają zakresy Dki współczynnika
intensywności naprężeń. Drugim z modeli, który
zostanie krótko omówiony jest model Wheelera,
odwołujący się bezpośrednio do mechanizmu
odpowiedzialnego za powstawanie efektu
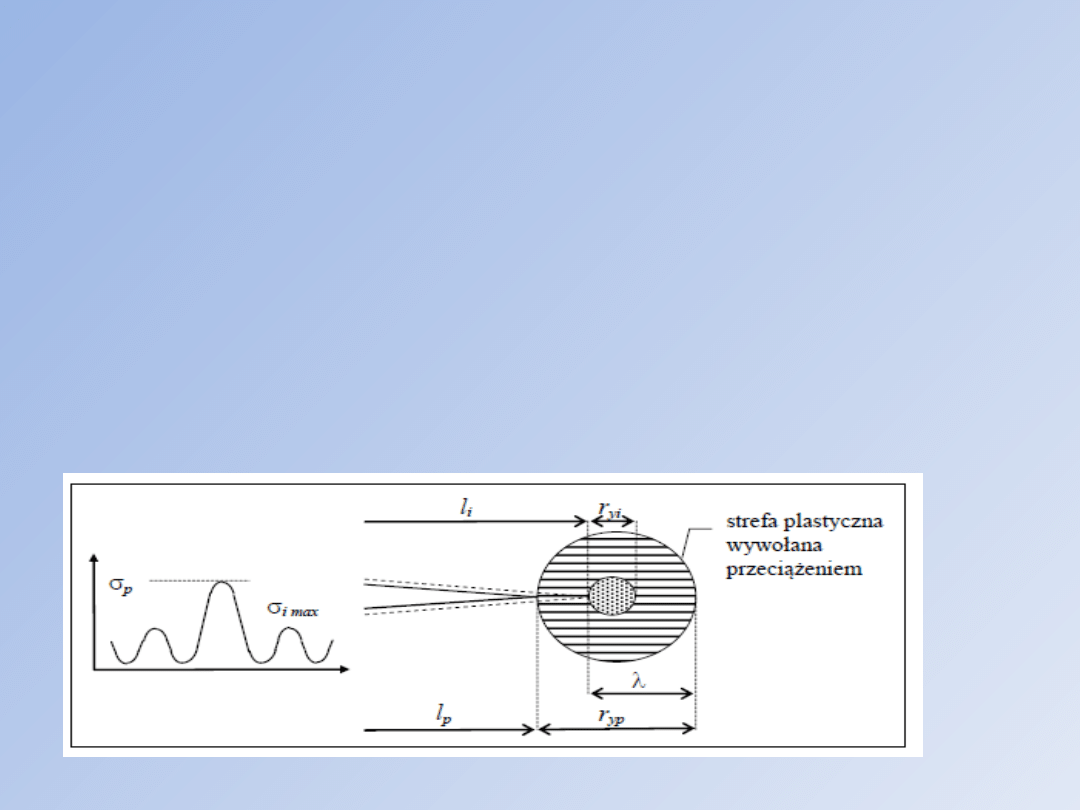
opóźnienia. Symbole użyte oznaczają: lp - długość
szczeliny w momencie przeciążenia, ryp - długość
strefy plastycznej odpowiadającej szczelinie lp, li -
długość szczeliny po przeciążeniu, ryidługość strefy
plastycznej towarzyszącej szczelinie li i obciążeniu
podstawowemu po wystąpieniu przeciążenia.
Model Wheelera opóźnienia wzrostu szczeliny zmęczeniowej.
Idea tego modelu opiera się na założeniu, że cykl
przeciążenia powoduje powstanie strefy
plastycznej o takiej wielkości, że strefy
plastyczne opowiadające kolejnym cyklom
podstawowym są od niej mniejsze. Oznacza to,
że ruch szczeliny zostanie przyhamowany -
„opóźniony” - gdyż musi się ona „przebić” przez
obszar umocniony plastycznie. Załóżmy, że w
chwili, gdy długość szczeliny wynosi lp następuje
cykl przeciążający o wielkości σp, w wyniku
którego tworzy się strefa plastyczna o długości
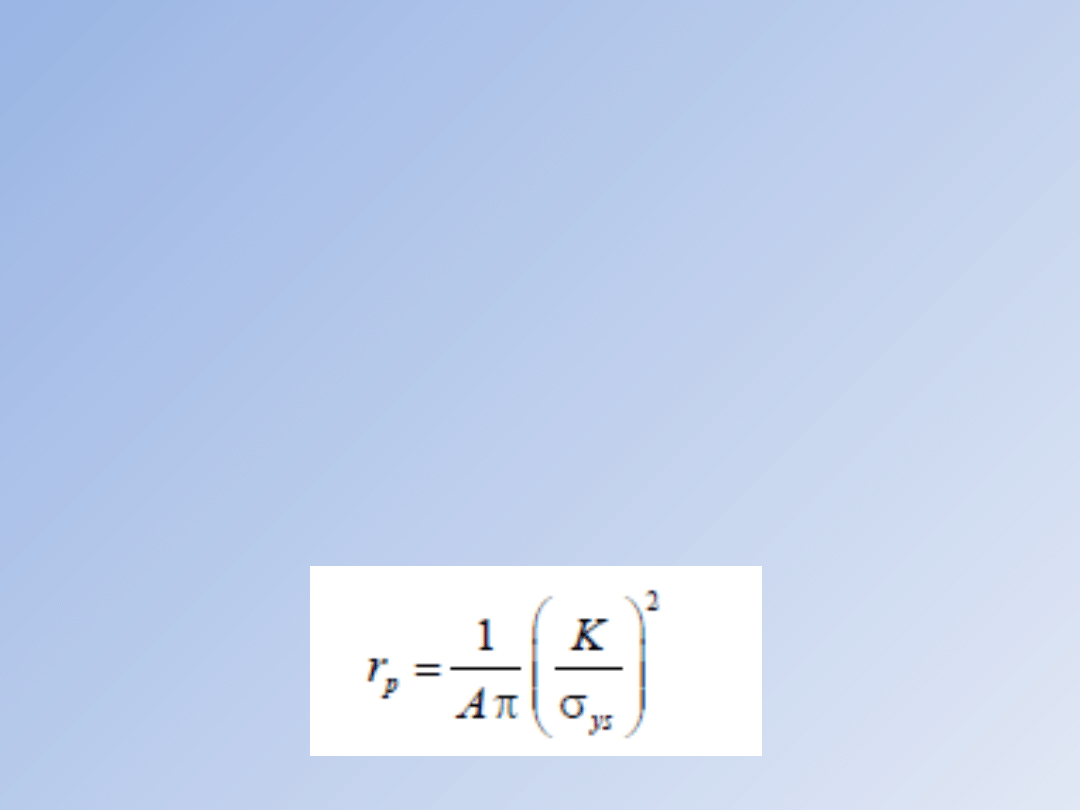
ryp. Miarodajne oszacowanie strefy plastycznej
daje związek - oparty na modelu Irwina - który
można zapisać w postaci:
gdzie: σys przyjmuje się jako równe granicy
plastyczności, zaś A jest współczynnikiem
wynoszącym A=1 dla płaskiego stanu
naprężenia i A=3 dla płaskiego stanu
odkształcenia. Uwzględniając, że
współczynnik intensywności naprężeń ma
dla opisanej sytuacji postać:
długość strefy plastycznej przy przeciążeniu
wynosi:
Gdy szczelina powiększy swoją długość do wartości li ,
aktualna długość strefy plastycznej będzie miała
długość:
gdzie: σimax jest maksymalnym naprężeniem w i -
tym cyklu.
Aktualna strefa plastyczna zawiera się w strefie
wywołanej przeciążeniem, która rozciąga się na
odległość λ od wierzchołka aktualnej szczeliny li.
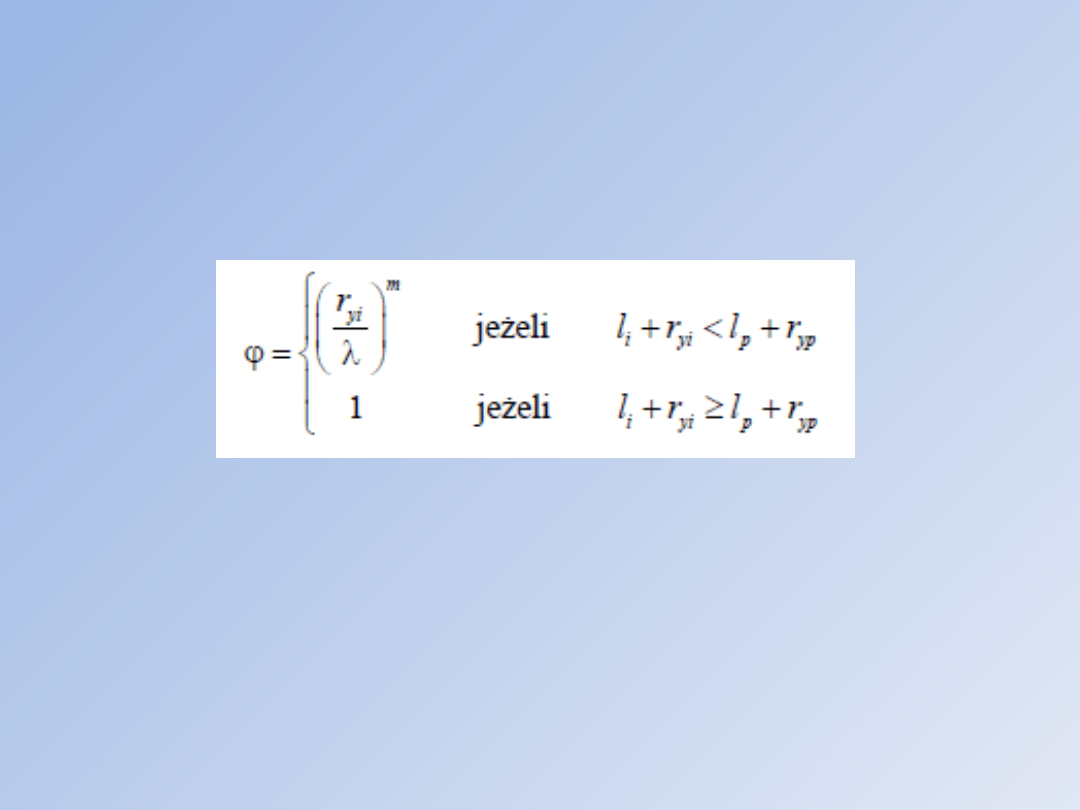
Wheeler wprowadził parametr opóźnienia φ i
powiązał go ze stosunkiem długości
aktualnej strefy plastycznej i enklawy
plastycznej utworzonej przy przeciążeniu.
Formuła określająca parametr φ ma
następującą postać:
gdzie: λ=lp+ryp-li, zaś wartość wykładnika m w
równaniu wynosi wg Wheelera: dla stali stopowej
D6AC m = 1.4, dla stopu tytanu Ti-6Al-4V m = 3.4.
Wartość φ =1 oznacza, że szczelina „przeszła”
przez strefę plastyczną wywołaną przeciążeniem,
a mówiąc inaczej można stwierdzić, że ustał wpływ
przeciążenia, a zarazem zanikł efekt opóźnienia
wzrostu szczeliny.
Prędkość wzrostu szczeliny zmęczeniowej przy
obciążeniu cyklicznym o zmiennej amplitudzie,
zgodnie z propozycją Wheelera wyraża się
następującym równaniem:
Równanie mówi, że prędkość wzrostu szczeliny przy zmiennej
amplitudzie można wyrazić poprzez prędkość wzrostu pęknięcia
odpowiadającą i-temu cyklowi obciążenia o zakresie zmienności
współczynnika intensywności naprężeń ΔKi. Funkcją f w równaniu
może być równanie Parisa lub inne formuły podane. W przypadku
wykorzystania równania Parisa, równanie przyjmuje postać:

WPŁYW ŚRODOWISKA NA
PROCES PĘKANIA
Od dawna wiadomo, że środowisko zewnętrzne, a w szczególności
media chemicznie agresywne w znaczący sposób przyspieszają
proces niszczenia konstrukcji inżynierskich. W obecności
środowiska agresywnego element może ulec zniszczeniu (np.
wskutek propagacji szczeliny) przy obciążeniu wywołującym
naprężenia znacznie mniejsze od wytrzymałości w normalnych
warunkach eksploatacyjnych. W kontekście zniszczenia
środowiskowego, przez które będziemy tu rozumieć podkrytyczne
(tzn. przy obciążeniu mniejszym od krytycznego) podrastanie
szczeliny, wyróżnia się trzy zasadnicze mechanizmy, a
mianowicie pękanie korozyjne, pękanie w wyniku kruchości
wodorowej (ang. hydrogen embrittlement) oraz kruchości
ciekłometalicznej (ang. liquid metal embrittlement). Mimo wielu
badań jakie wykonano dla wyjaśnienia istoty tych zjawisk, żadne
z nich nie doczekało się jak dotychczas całościowej teorii.

W badaniach doświadczalnych dotyczących oceny
podatności szczelin na propagację wywołaną procesami
korozyjnymi stosuje się dwa typy eksperymentów - badania
czasu do zniszczenia i badania prędkości wzrostu szczeliny.
W obu kategoriach badań korzysta się z próbek poddanych
działaniu stałego obciążenia (próbki w postaci beleczek
wspornikowych) lub też poddanych działaniu stałego
przemieszczenia powierzchni szczeliny, wymuszanego
poprzez zagłębianie klina w szczelinę.
Badania prowadzi się w określonym środowisku
zewnętrznym – wyniki badań mogą więc być następnie
odnoszone do takich samych lub zbliżonych warunków
środowiskowych. W przypadku prób polegających na
określaniu czasu do zniszczenia – seria próbek zawierających
szczeliny o tej samej długości początkowej, obciążana jest
różnymi co do wartości obciążeniami początkowymi, którym
odpowiadają różne początkowe współczynniki intensywności
naprężeń KIi . Każdy pojedynczy i – ty test trwa tak długo, aż
próbka ulegnie zniszczeniu. W ten sposób otrzymuje się parę
liczb (KIi , ti), gdzie ti oznacza czas do zniszczenia dla i - tej
próbki. Dzięki takiej procedurze uzyskuje się wykres
zależności czasu do zniszczenia od początkowej wartości
współczynnika intensywności naprężeń.
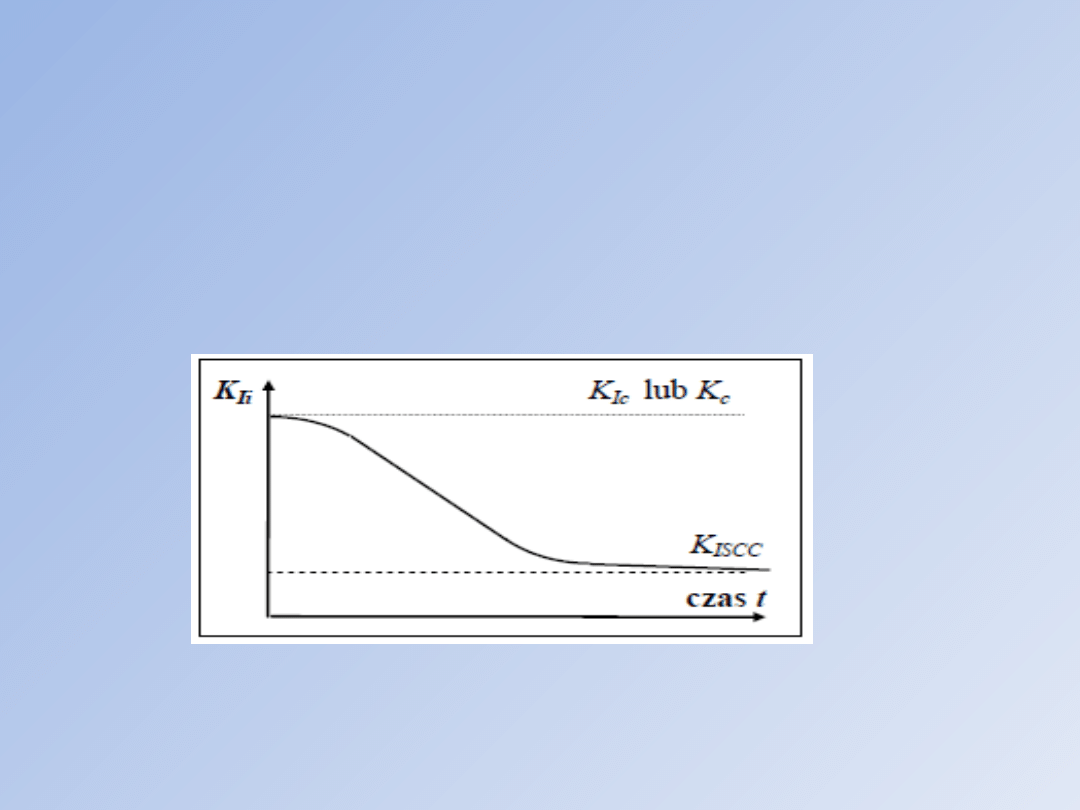
Przykład takiego wykresu pokazano na Rys. .Próbki obciążone
początkowo obciążeniem o współczynniku intensywności Kic
(odporność na kruche pękanie) lub Kc (odporność na pękanie w
konkretnych warunkach, niespełniających warunków płaskiego
stanu odkształcenia) niszczą się w momencie jego przyłożenia.
Próbki poddane działaniu obciążenia o WIN mniejszym od pewnej
wartości KISCC nie niszczą się nigdy. Wartość ta nosi nazwę
progowej - indeks „SCC” oznacza, że chodzi o pękanie wywołane
naprężeniami korozyjnymi (ang. Stress Corrosion Cracking).
Czas do zniszczenia t w funkcji początkowej wartości
współczynnika intensywności naprężeń KIi, w określonych
warunkach środowiskowych

Panuje zgodność co do tego, że wartość KISCC jest
charakterystyką tylko materiału i środowiska w
jakim się on znajduje. Wszystkie inne stany
obciążenia mieszczą się pomiędzy dwoma stanami
granicznymi, określonymi przez KIc (Kc) i KISCC.
Przypomnijmy, że obciążenie w omawianej
metodzie jest utrzymywane w trakcie trwania
próby na stałym poziomie. Jeśli uwzględnimy, że
długość szczeliny wraz z upływem czasu rośnie, to
dochodzimy do wniosku, że musi także wzrastać
bieżąca wartość współczynnika intensywności
naprężeń. Stad konkluzja, że wzrost szczeliny na
jednostkę czasu jest funkcją WIN.
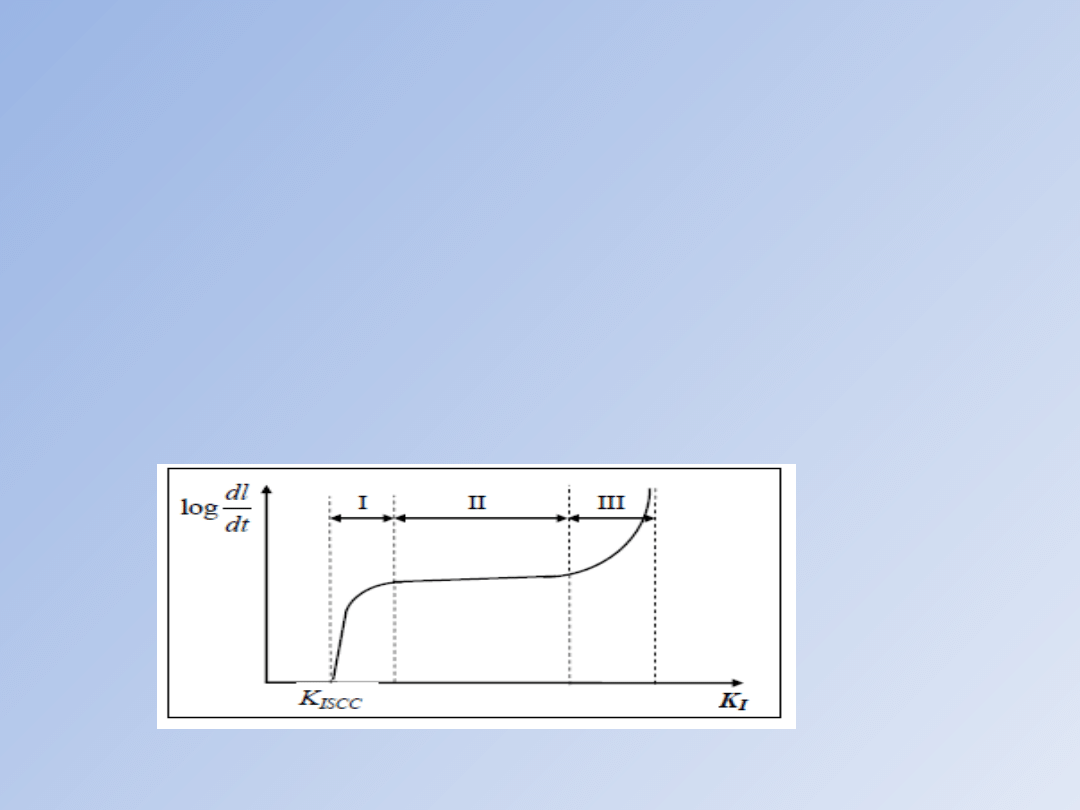
Cały zakres prędkości szczeliny można podzielić na
trzy obszary, z których I i III to obszary, w których
prędkość silnie zależy od współczynnika
intensywności naprężeń, czyli zarazem
działającego obciążenia zewnętrznego. W obszarze
II prędkość jest niemal niewrażliwa na zmiany K,
tak więc ruch szczeliny nie jest spowodowany
przyczyną mechaniczną, jaką jest obciążenie, ale
niemal wyłącznie czynnikami powiązanymi z
procesem korozji (chemicznymi, metalurgicznymi,
materiałowymi i in.)
Prędkość podkrytycznego wzrostu szczeliny korozyjnej w funkcji współczynnika
intensywności naprężeń.

Wg danych Broek’a proces korozyjnego wzrostu szczeliny,
jeżeli tylko ma miejsce (oznacza to, że musi zachodzić
warunek K ³KISCC), trwa zwykle nie dłużej niż 1000 godzin.
Jest to tak krótki okres, że z reguły fakt rozwoju pęknięcia
uchodzi uwadze w trakcie rutynowych inspekcji,
przeprowadzanych rzadziej. Doświadczenie jednoznacznie
wskazuje, że zdecydowanie lepsze skutki w przypadku
szczelin korozyjnych daje zapobieganie ich wzrostowi, aniżeli
kontrolowanie tego wzrostu (dodajmy w tym miejscu, że w
przypadku obciążeń cyklicznych okresowa kontrola
zachowania szczeliny jest z punktu widzenia bezpieczeństwa
konstrukcji w zupełności wystarczająca). Z formalnego
punktu widzenia zapobieganie rozwojowi pęknięcia w
środowisku wywołującym korozję polega na spełnieniu
warunku K<KISCC. Sposób wykorzystania tej relacji jest taki
sam jak sposób wykorzystania siłowego kryterium pękania
K<KIc w celu określenia dopuszczalnej długości szczeliny lub
dopuszczalnego obciążenia - wystarczy jedynie zamienić KIc
przez KISCC.

BIBLIOGRAFIA
• Janusz German „podstawy mechaniki
pękania” Kraków 2011,
• Janusz German „Liniowa mechanika
pękania”,
• Grzegorz Robak „Analiza rozwoju
pęknięć”.

DZIĘKUJĘ ZA UWAGĘ
Document Outline
- SZCZELINY ZMĘCZENIOWE
- WZROST SZCZELIN ZMĘCZENIOWYCH
- PowerPoint Presentation
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- SZCZELINA ZMĘCZENIOWA PRZY OBCIĄŻENIU CYKLICZNYM O STAŁEJ AMPLITUDZIE
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Krzywa prędkości wzrostu szczeliny zmęczeniowej
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Równania prędkości propagacji szczeliny zmęczeniowej
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Czas życia elementu ze szczeliną zmęczeniową
- Slide 36
- Slide 37
- Slide 38
- SZCZELINA ZMĘCZENIOWA PRZY OBCIĄŻENIU CYKLICZNYM O ZMIENNEJ AMPLITUDZIE
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- WPŁYW ŚRODOWISKA NA PROCES PĘKANIA
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- BIBLIOGRAFIA
- DZIĘKUJĘ ZA UWAGĘ
Wyszukiwarka
Podobne podstrony:
CLIPS NOWY schemat wybór noza SOJA
PRAZONA SOJA A
Soja, ZDROWIE-Medycyna naturalna, Poczta Zdrowie
Soja, 01 - inf . podstawowe
wykłady soja 5, Materiały do studiów z geografii, Geografia fizyczna kontynentów i oceanów, Wykłady
wykłady soja 6, Materiały do studiów z geografii, Geografia fizyczna kontynentów i oceanów, Wykłady
jakość, IM sekcja SOKÓŁ, SOJA (1)
wykłady soja 3, Materiały do studiów z geografii, Geografia fizyczna kontynentów i oceanów, Wykłady
wykłady Soja, Materiały do studiów z geografii, Geografia fizyczna kontynentów i oceanów, Wykłady pr
wykłady soja 4, Materiały do studiów z geografii, Geografia fizyczna kontynentów i oceanów, Wykłady
Soja gotowana w strączkach
Soja z grzybami
7CA8LEZKR[1]wykłady soja 7, Materiały do studiów z geografii, Geografia fizyczna kontynentów i ocean
Soja po bretońsku by Javona
jakość, IM sekcja SOKÓŁ, SOJA
Soja i jej kosmetyczne właściwośc1
Soja - żywi i leczy, Studium kosmetyczne, Chemia kosmetyczna
Warzywa, owoce, Soja z pieczarkami, Soja z pieczarkami
więcej podobnych podstron