Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sieci dynamiczne
sieci rekurencyjne,
sieci Hopfielda,
pamięci asocjacyjne,
sieci asocjacyjne
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Dynamiczne Sieci Neuronowe
Sieć neuronowa jest statyczna gdy:
wyjście sieci w danej chwili jest
zależne
jedynie od wejść w tej chwili:
Sieć neuronowa jest dynamiczna gdy:
wyjście sieci w danej chwili jest
zależne od wejść w danej chwili oraz w
chwilach
poprzednich:
€
y(t) =h(x(t))
Dynamika w sieciach może być uzyskana
poprzez zastosowanie: linii opóźniających
i/lub rekurencji.
Sieci takie dzielimy na: dynamiczne sieci
jednokierunkowe oraz rekurencyjne.
€
y(t)=h(x(t), x(t−1),K ,x(0),y(0))
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Dynamiczne
sieci
jednokierunko
we
Podstawy Sztucznej
Inteligencji
Jan Kusiak
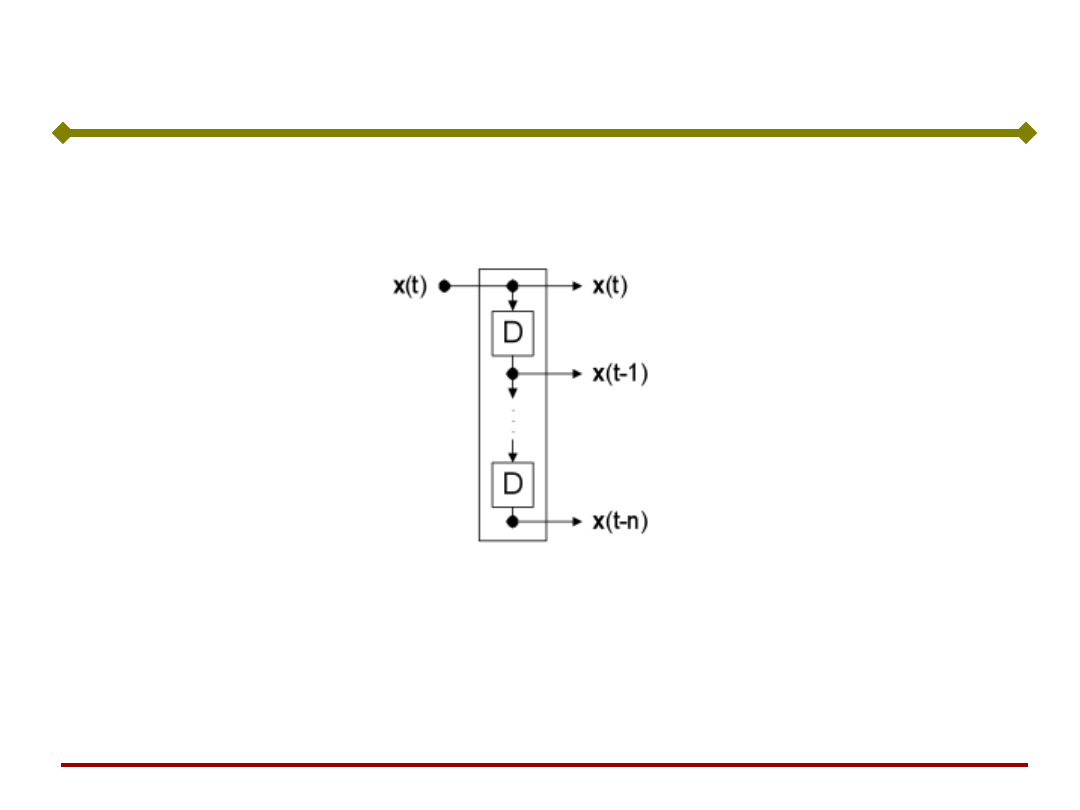
Linia opóźniająca
Podstawy Sztucznej
Inteligencji
Jan Kusiak
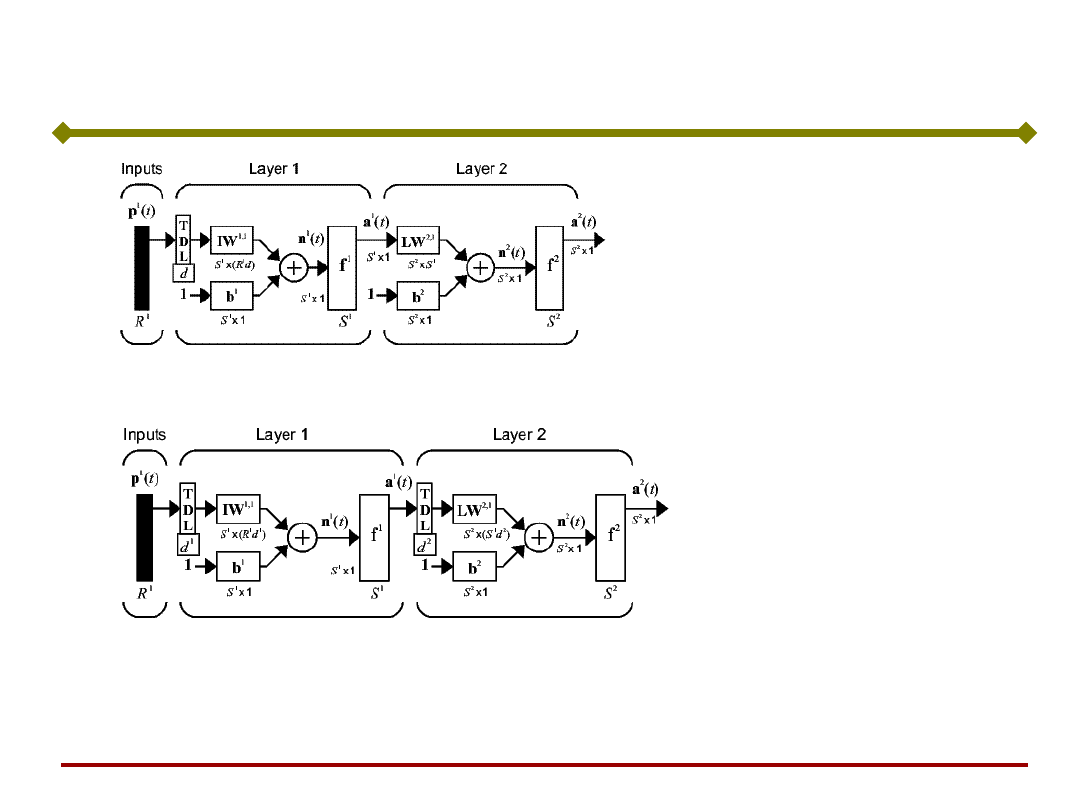
Dynamiczne Sieci Jednokierunkowe
(FTDNN)
(DTDNN)
))
(
,
),
1
(
),
(
(
)
(
d
t
u
t
u
t
u
h
t
y
))
(
,
),
1
(
),
(
(
)
(
1
d
t
u
t
u
t
u
h
t
a
))
(
,
),
1
(
),
(
(
)
(
1
1
1
d
t
a
t
a
t
a
g
t
y
Podstawy Sztucznej
Inteligencji
Jan Kusiak
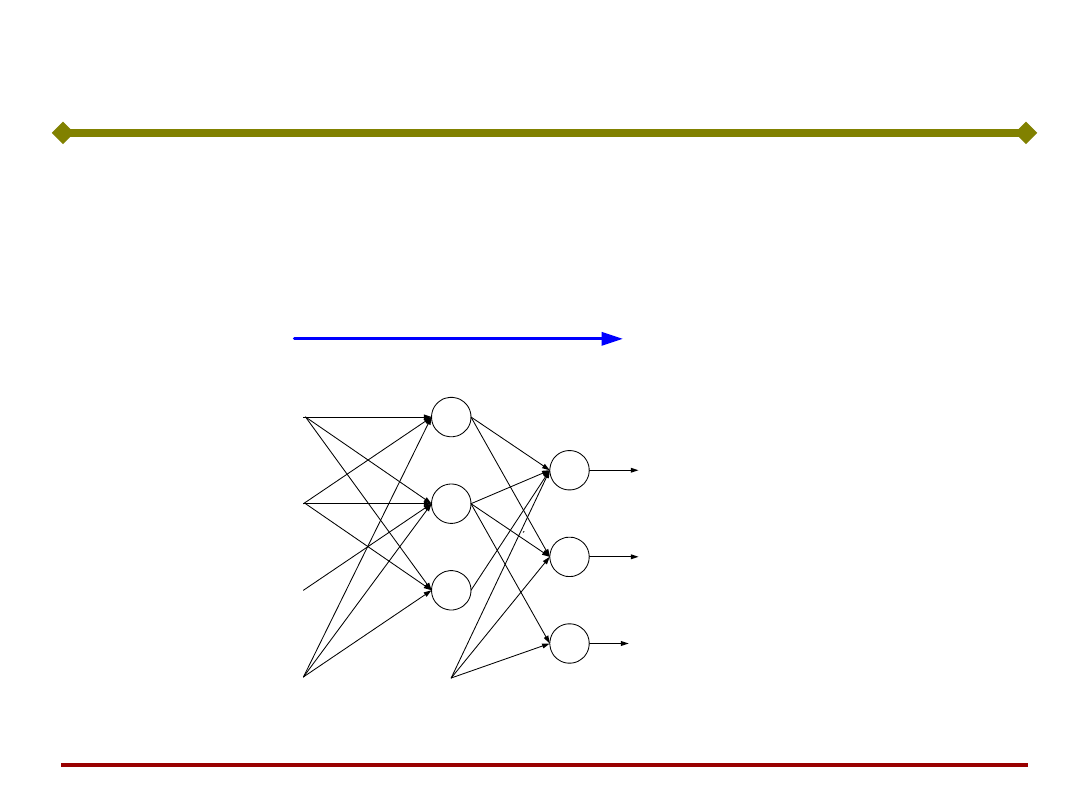
W rozważanych dotychczas sieciach sygnał był
przekazywany w jednym kierunku – od wejścia do
wyjścia (sieci jednokierunkowe, feedforward networks).
Sieci rekurencyjne (ze sprzężeniem zwrotnym,
dynamiczne, pamięci asocjacyjne)
1
J -1
j
x
1
x
i
x
I-1
z
1
z
k
z
K
v
11
v
j1
v
1i
v
1i
v
1I
v
j1
v
ji
v
jI
v
J -1,I
.
.
.
.
.
.
.
.
.
.
.
.
x
J
= -1
w
11
v
11
1
K
k
.
.
.
.
.
.
y
J
= -1
w
k1
w
1j
w
kj
w
Kj
w
kJ
w
KJ
w
1J
warstwa wyjściowa
warstwa ukryta
WE
(x)
WY
(z)
Podstawy Sztucznej
Inteligencji
Jan Kusiak
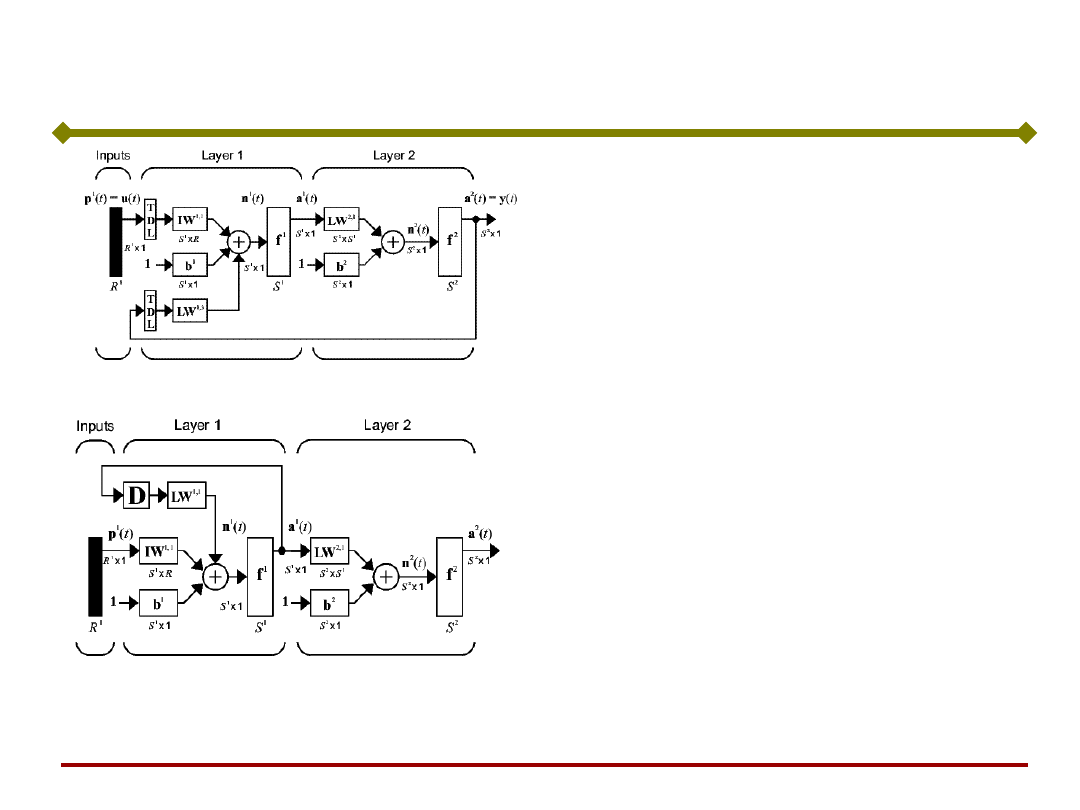
Sieci Rekurencyjne
(NARX)
(LRN)
)
),
1
(
),
(
,
),
2
(
),
1
(
(
)
(
t
u
t
u
t
y
t
y
h
t
y
))
(
),
1
(
(
)
(
1
1
t
u
t
a
h
t
a
))
(
(
)
(
1
t
a
g
t
y
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sieci Hopfielda
(sieć asocjacyjna,
pamięć
asocjacyjna)
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sieci asocjacyjne (sieci Hopfielda) - klasa sieci rekurencyjnych,
które dają możliwość rekonstrukcji i rozpoznawania wcześniej
zapamiętanych wzorców na podstawie skojarzeń, bazując na
dostępnym fragmencie wzorca lub wzorca podobnego do niego.
Są wykorzystywane do modelowania pamięci skojarzeniowej.
Sieć Hopfielda (1982)
Podstawy Sztucznej
Inteligencji
Jan Kusiak
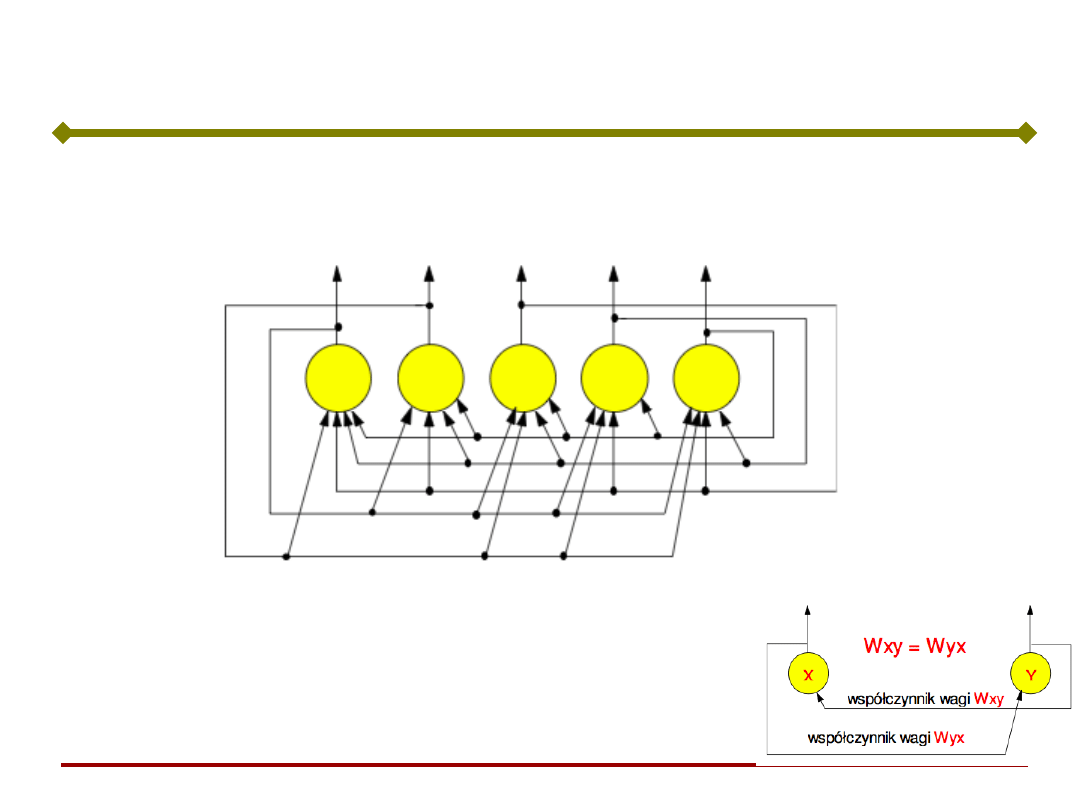
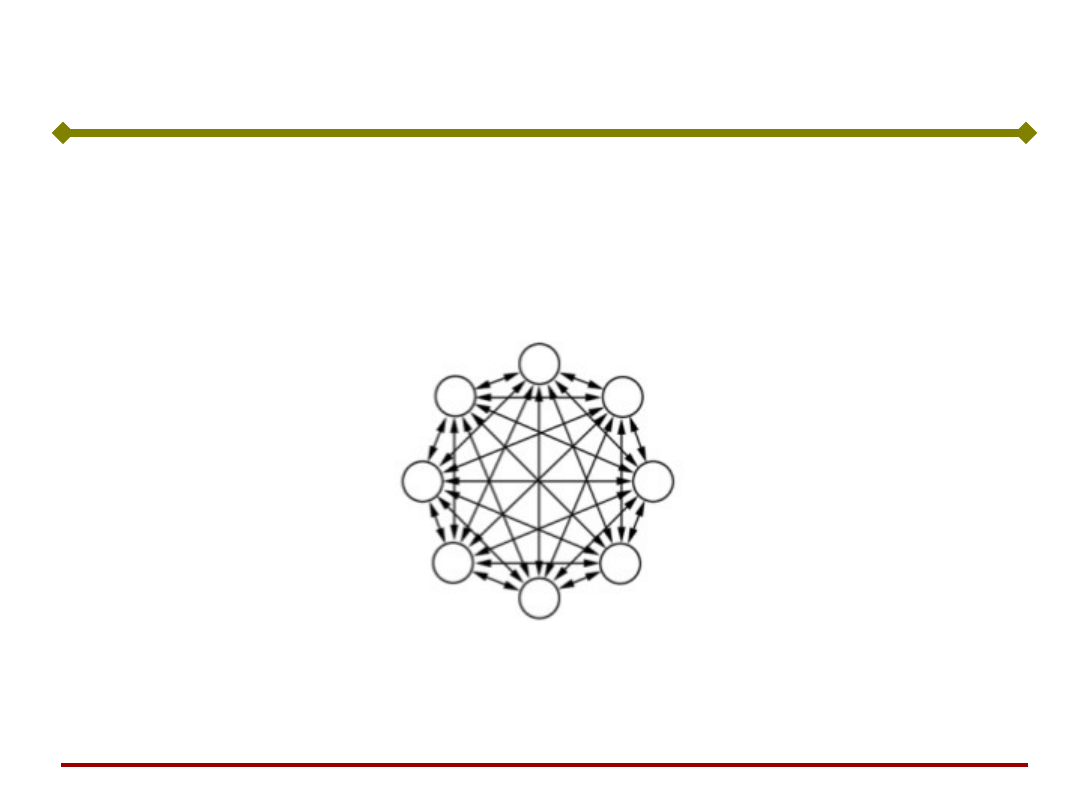
Sieć Hopfielda (1982)
Sieci Hopfielda, są to jednowarstwowe sieci ze
sprzężeniem zwrotnym (często nazywane pamięcią
asocjacyjną)
•Połączenie “każdy z każdym”
•Brak sprzężenia zwrotnego do siebie
samego
•Symetryczna macierz współczynników
wagowych
Podstawy Sztucznej
Inteligencji
Jan Kusiak
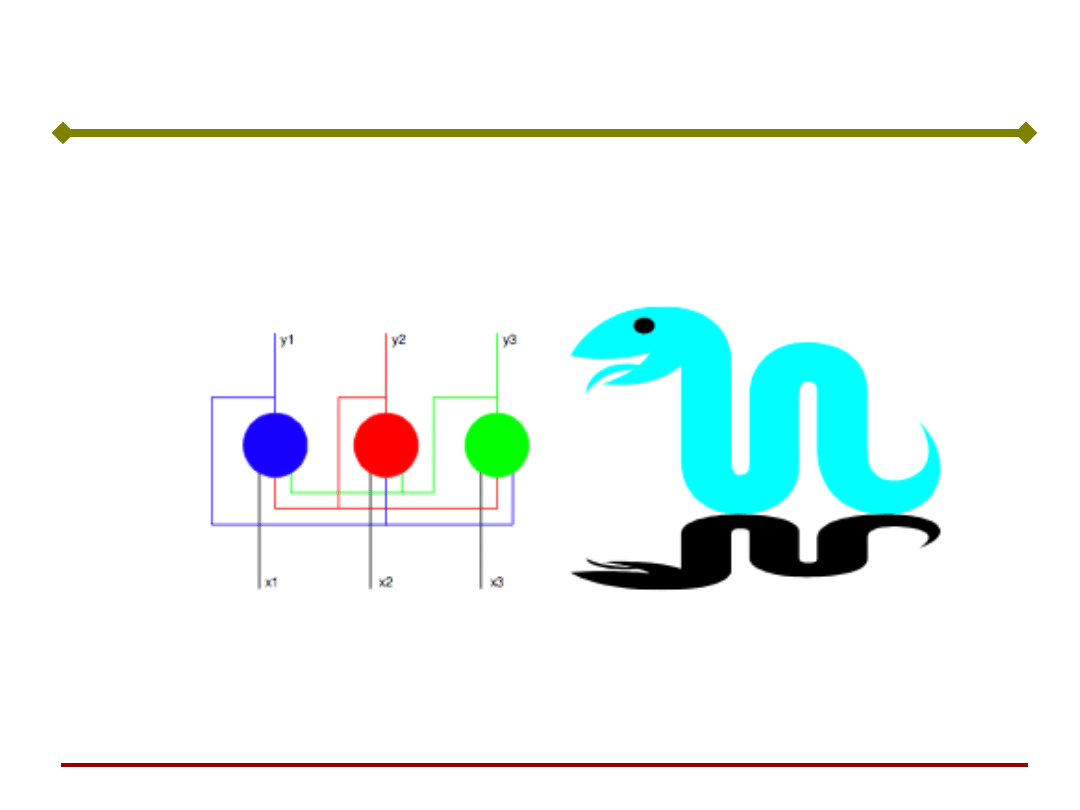
Sieć Hopfielda
[R. Tadeusiewicz]
Pytanie czy sieć Hopfielda ma sprzężenia zwrotne
przypomina inne pytanie: czy wąż ma ogon?
Odpowiedź w obydwu przypadkach jest taka sama.
Wyłącznie !!!
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Na skutek istnienia sprzężeń zwrotnych w sieciach
rekurencyjnych pojawiają się dynamiczne procesy
przejściowe, nieznane w innych rodzajach sieci.
Sieć Hopfielda
Z punktu widzenia teorii systemów sieci rekurencyjne
są nieliniowymi układami dynamicznymi, gdyż ich
zachowanie się w czasie jest wyznaczone nie tylko
przez aktualnie działające wejścia, lecz zależy
również od wejść, które występowały w przeszłości.
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sieć Hopfielda
Sygnały na wyjściach sieci zależą od jej stanu
początkowego i podanych następnie pobudzeń.
Sieć nie pobudzana zewnętrznym sygnałem
wejściowym, której stan podlega zmianom tylko
wskutek istniejących sprzężeń zwrotnych, nazywana
jest siecią autonomiczną.
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sieć Hopfielda
Sieci Hopfielda często rysowane są w sposób bardziej
praktyczny
Podstawy Sztucznej
Inteligencji
Jan Kusiak
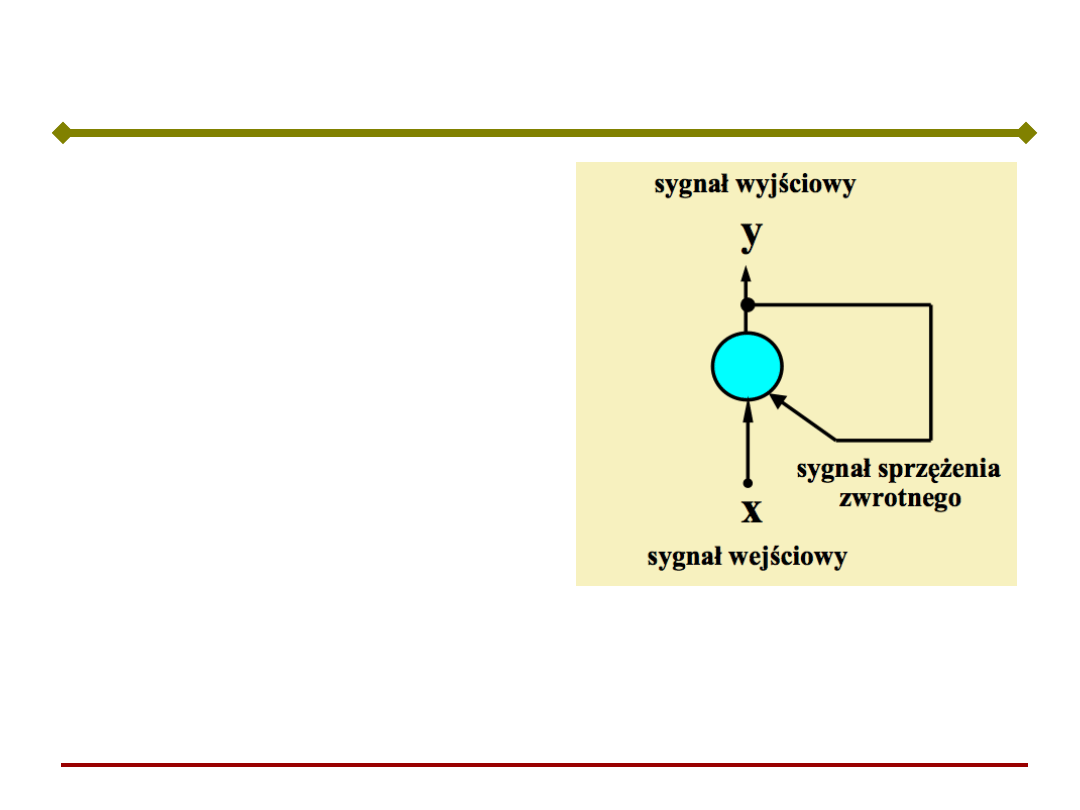
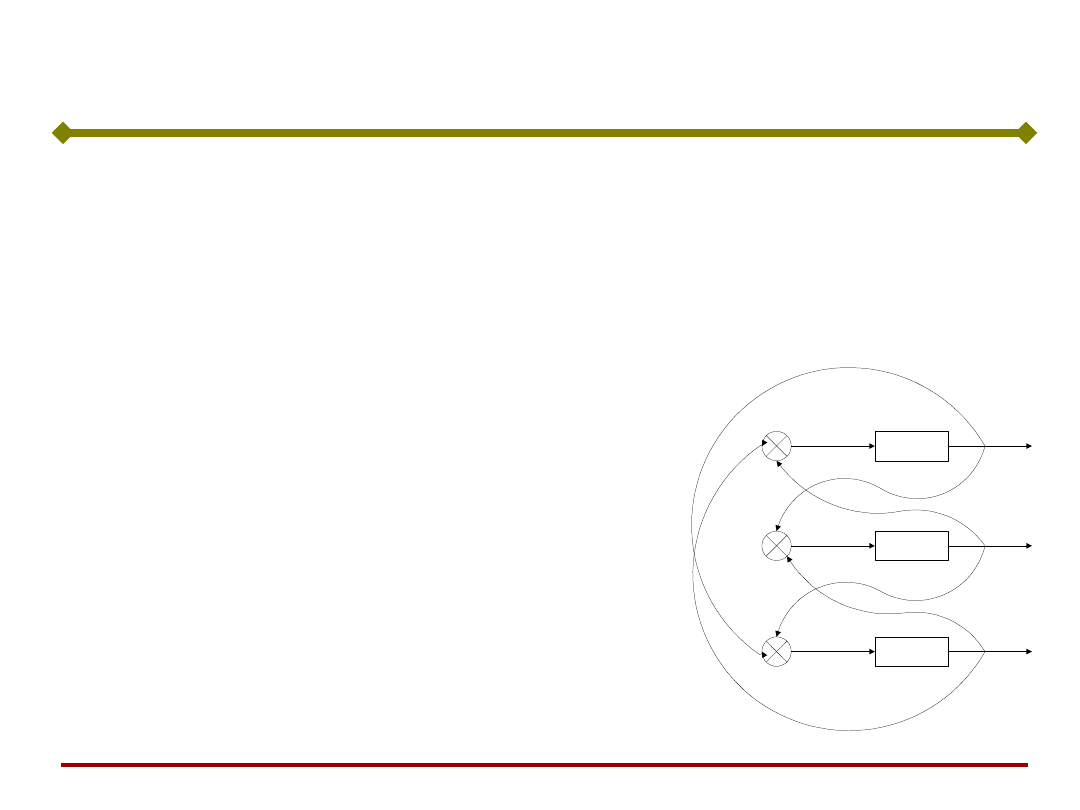
Sieci rekurencyjne
(recurrent neural
networks) posiadają
sprzężenia zwrotne –
wyjścia neuronów są
połączone z wejściami
neuronów.
Sieci Hopfielda
Sieci taka charakteryzuje
się dynamiką.
Po jednorazowym podaniu
sygnału (impulsu) na
wejście, na wyjściu
zachodzi długotrwały
proces.
Sygnał wyjściowy zmienia wielokrotnie wartość zanim
osiągnie stan równowagi - jeżeli go osiągnie
Podstawy Sztucznej
Inteligencji
Jan Kusiak
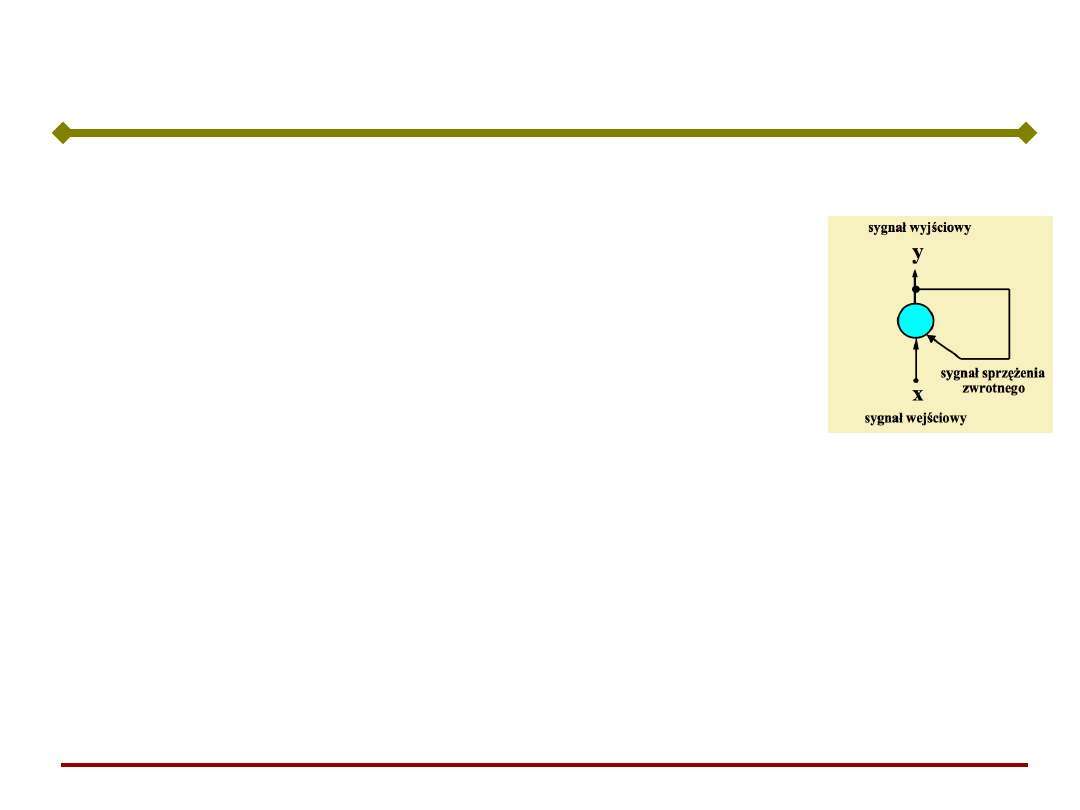
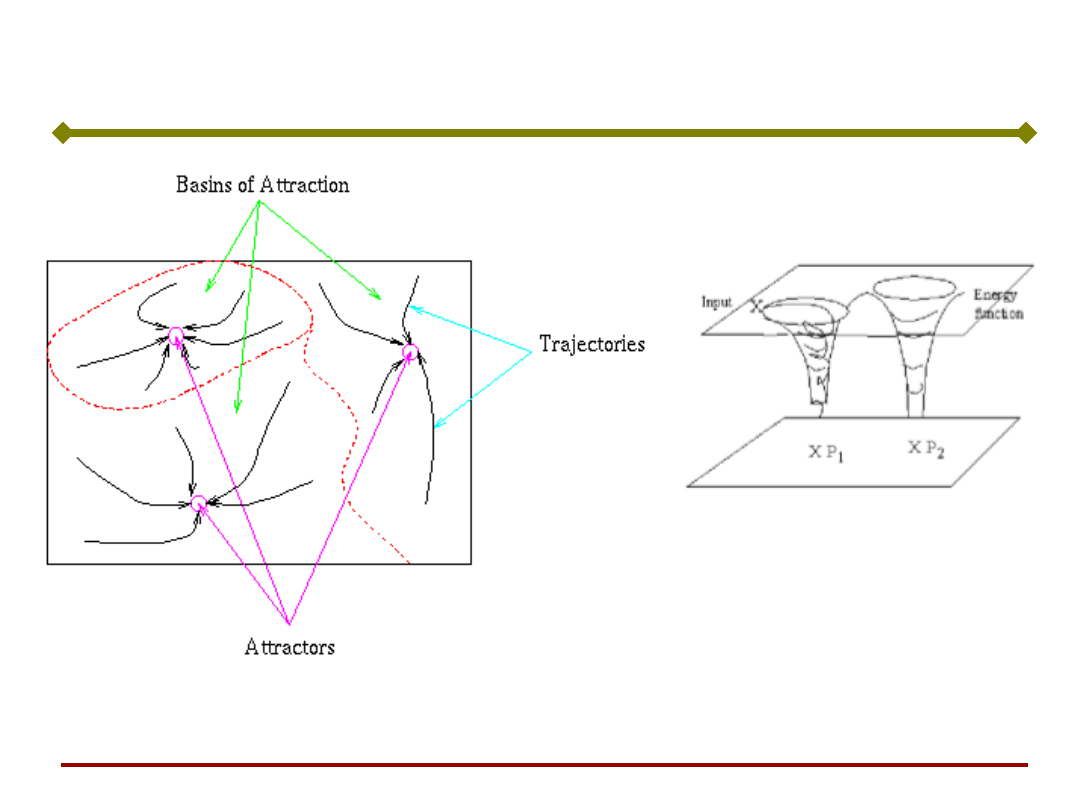
Równowaga w sieci może być
osiągnięta (bez działającego sygnału
wejściowego) jedynie w taki sposób, że
sygnał wyjściowy po przemnożeniu
przez wagę sprzężenia zwrotnego nie
zmienia swojej wartości (pozostaje taki
sam).
Taki sygnał nazywamy ATRAKTOREM.
Położenie atraktora jest związane z
parametrami sieci.
Sieci Hopfielda
Podstawy Sztucznej
Inteligencji
Jan Kusiak
w =
w =
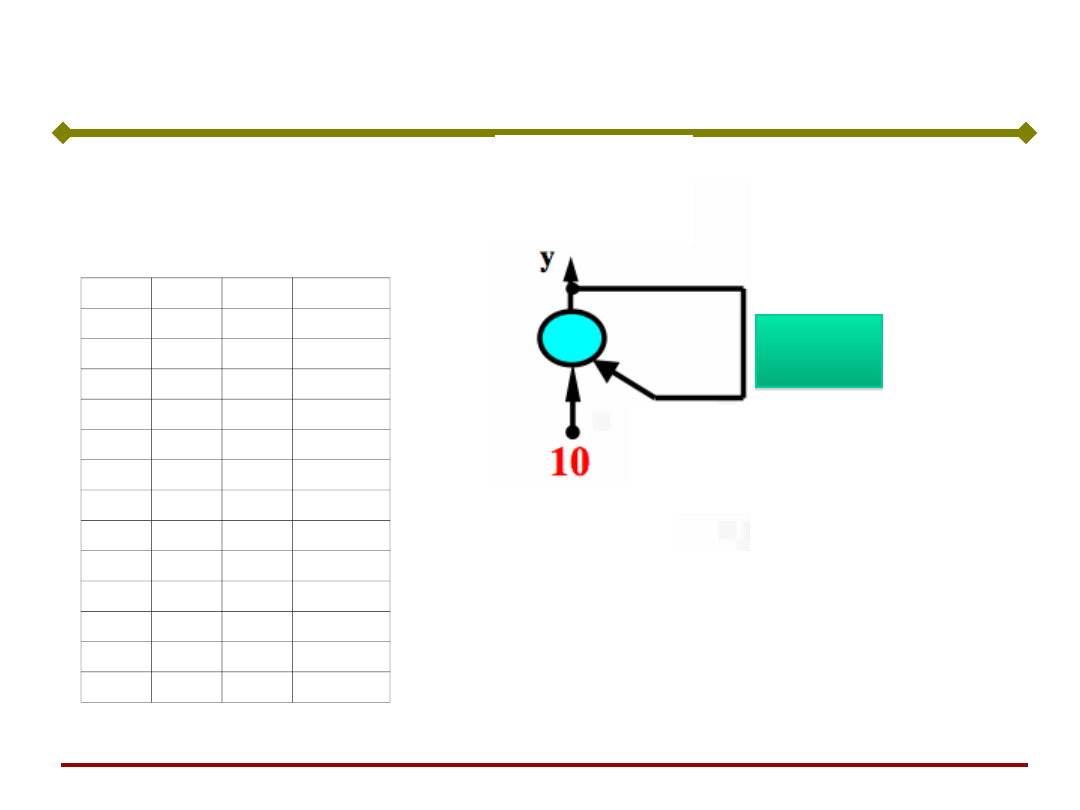
Jeżeli wartość wagi
sprzężenia zwrotnego jest
ujemna, wówczas sygnał
wyjściowy ma charakter
oscylacyjny
x0= 10
w= -1,20
i
y
1
10,00
2
-12,00
3
14,40
4
-17,28
5
20,74
6
-24,88
7
29,86
8
-35,83
9
43,00
10
-51,60
x
0
=
10
(tylko w chwili początkowej)
;
w = -1.20
Sieci Hopfielda
Podstawy Sztucznej
Inteligencji
Jan Kusiak
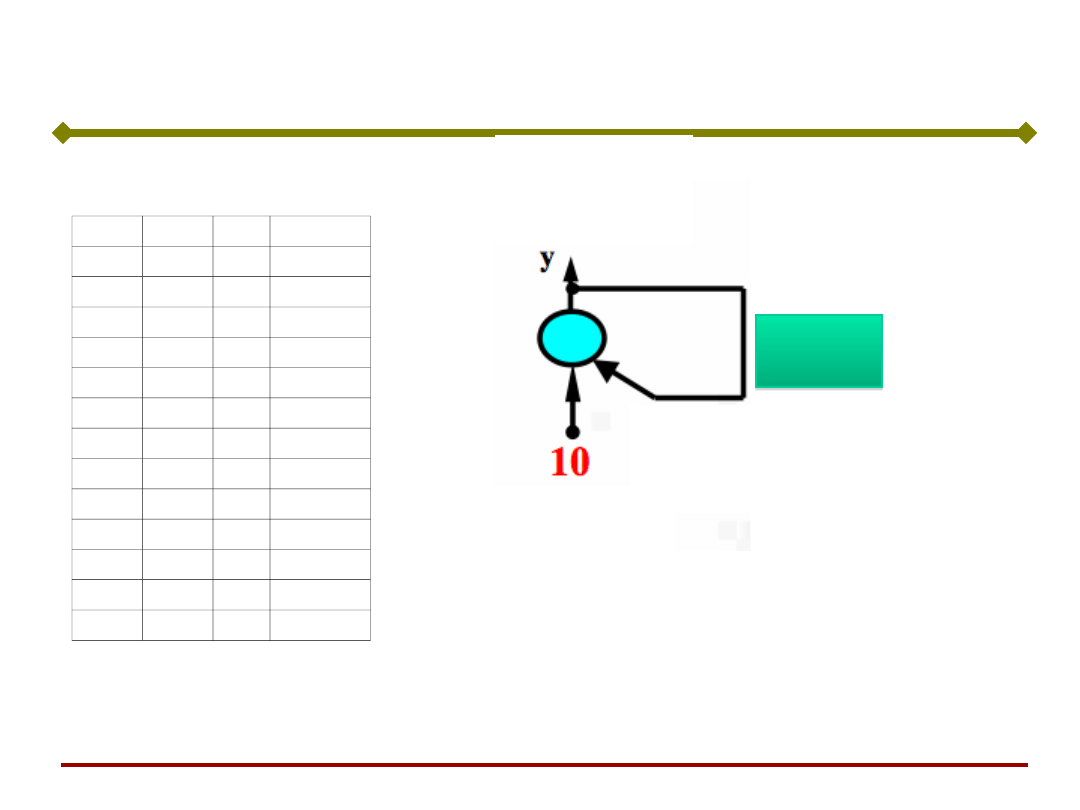
Jeżeli wartość wagi sprzężenia
zwrotnego jest dodatnia,
wówczas sygnał wyjściowy ma
charakter aperiodyczny
x0= 10
w= 1,40
i
y
1
10,00
2
14,00
3
19,60
4
27,44
5
38,42
6
53,78
7
75,30
8
105,41
9
147,58
10
206,61
w =
w =
x
0
= 10; w = 1.40
Sieci Hopfielda
Podstawy Sztucznej
Inteligencji
Jan Kusiak
w
=
w
=
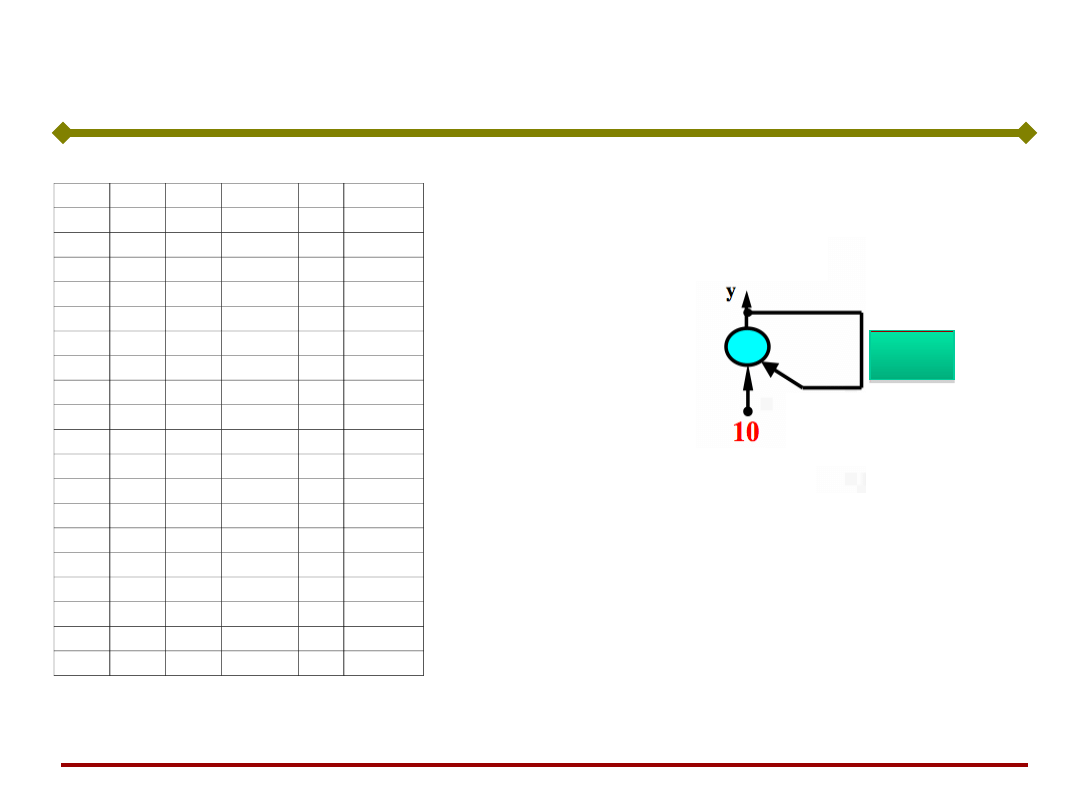
Jeżeli bezwzględna wartość wagi
sprzężenia zwrotnego jest mniejsza
od pewnej wartości – granicy
stabilności – układ dąży do stanu
równowagi.
Powyżej tej wartości układ jest
niestabilny – odpowiedź rośnie do
nieskończoności
x0= 10
w= 0,50
w= -0,40
i
y
y
1
10,00
10,00
2
5,00
-4,00
3
2,50
1,60
4
1,25
-0,64
5
0,63
0,26
6
0,31
-0,10
7
0,16
0,04
8
0,08
-0,02
9
0,04
0,01
10
0,02
0,00
11
0,01
0,00
12
0,00
0,00
13
0,00
0,00
14
0,00
0,00
15
0,00
0,00
16
0,00
0,00
17
0,00
0,00
1). x
0
= 10; w = 0.50
2). x
0
= 10; w = - 0.40
Sieci Hopfielda
Podstawy Sztucznej
Inteligencji
Jan Kusiak
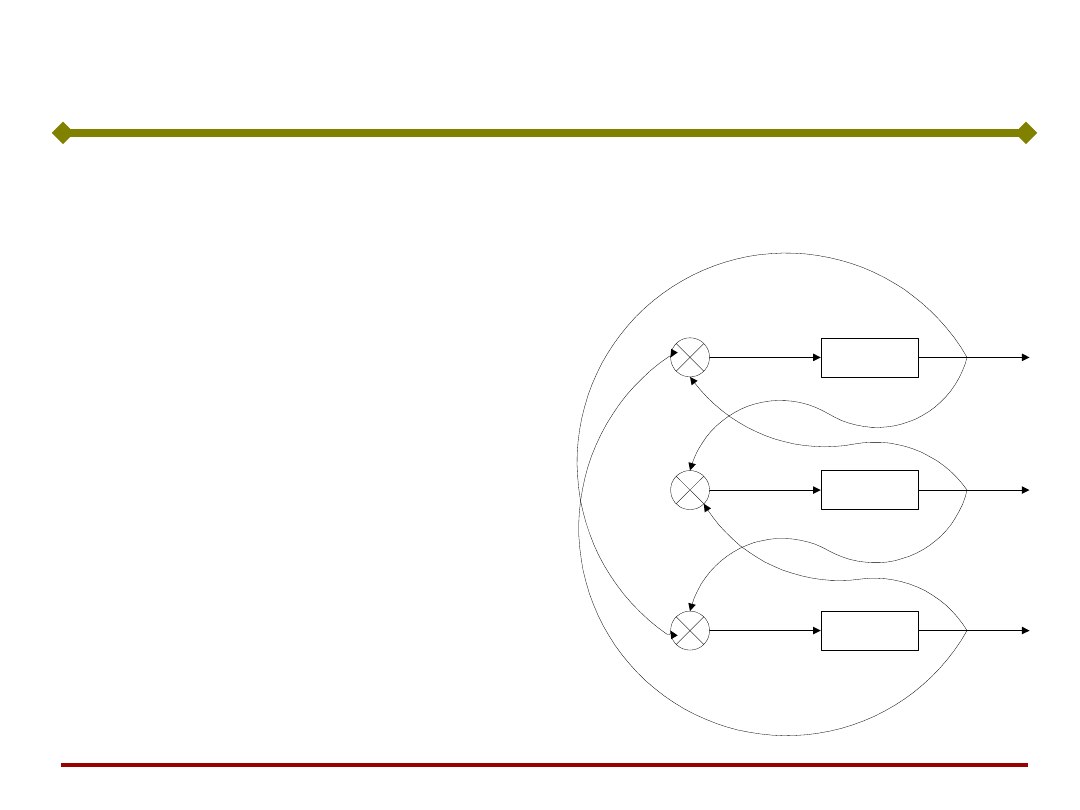
Sieci rekurencyjne (recurrent neural networks)
posiadają sprzężenia zwrotne – wyjścia neuronów są
połączone z wejściami neuronów.
Sieci Hopfielda
Podstawy Sztucznej
Inteligencji
Jan Kusiak
•Sieci rekurencyjne są nieliniowymi układami
dynamicznymi, gdyż ich zachowanie się w czasie
jest wyznaczone nie tylko przez aktualnie działające
wejścia, lecz zależy również od wejść, które
występowały w przeszłości.
•Sygnały na wyjściach sieci zależą od jej stanu
początkowego i podanych następnie pobudzeń.
•Sieć nie pobudzana zewnętrznym sygnałem
wejściowym, której stan podlega zmianom tylko
wskutek istniejących sprzężeń zwrotnych, nazywana
jest siecią autonomiczną.
Sieci Hopfielda
Podstawy Sztucznej
Inteligencji
Jan Kusiak
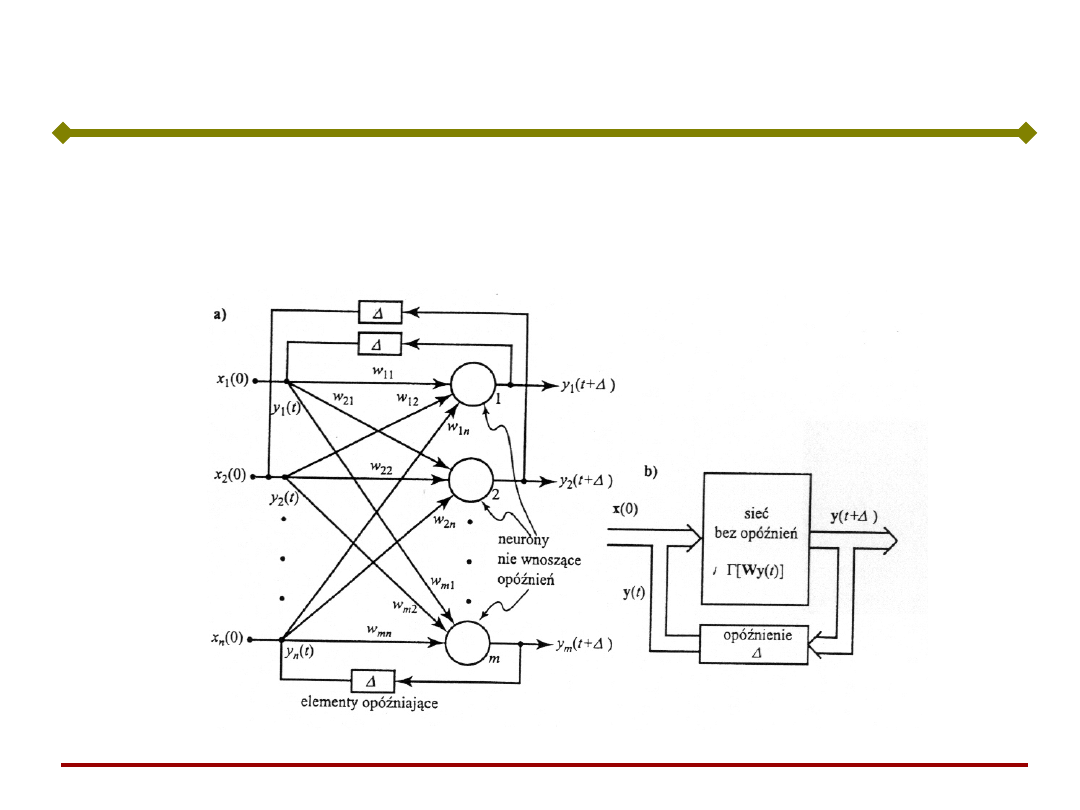
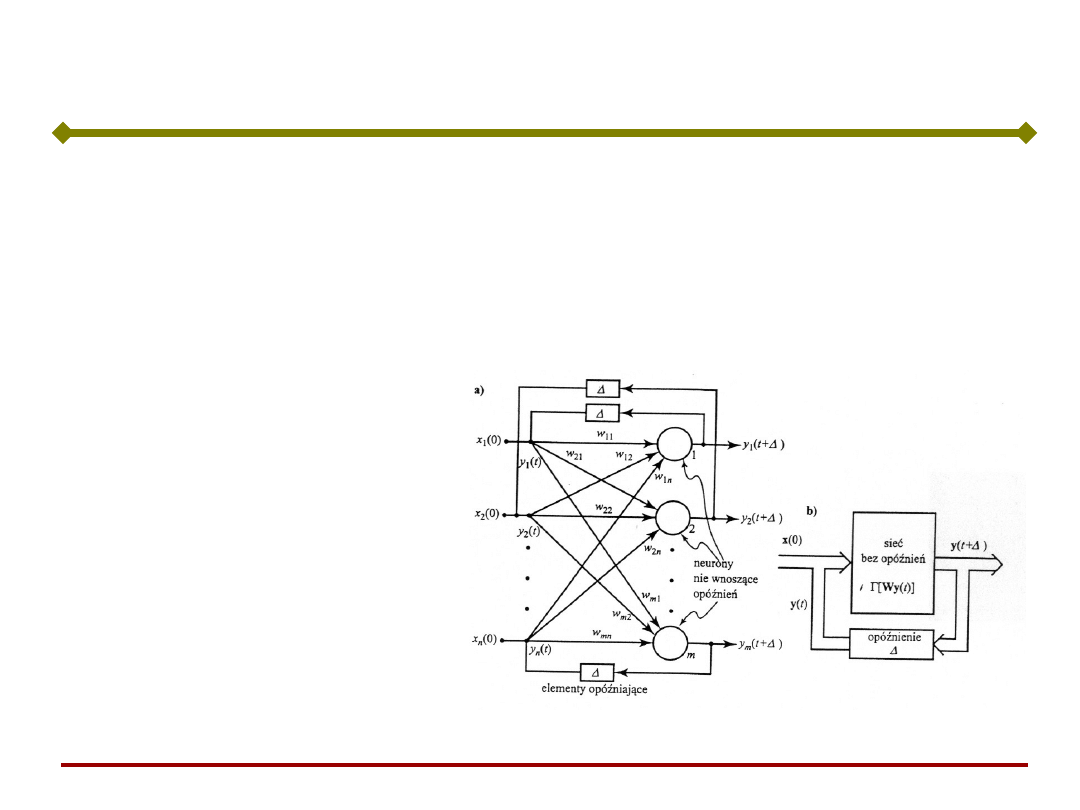
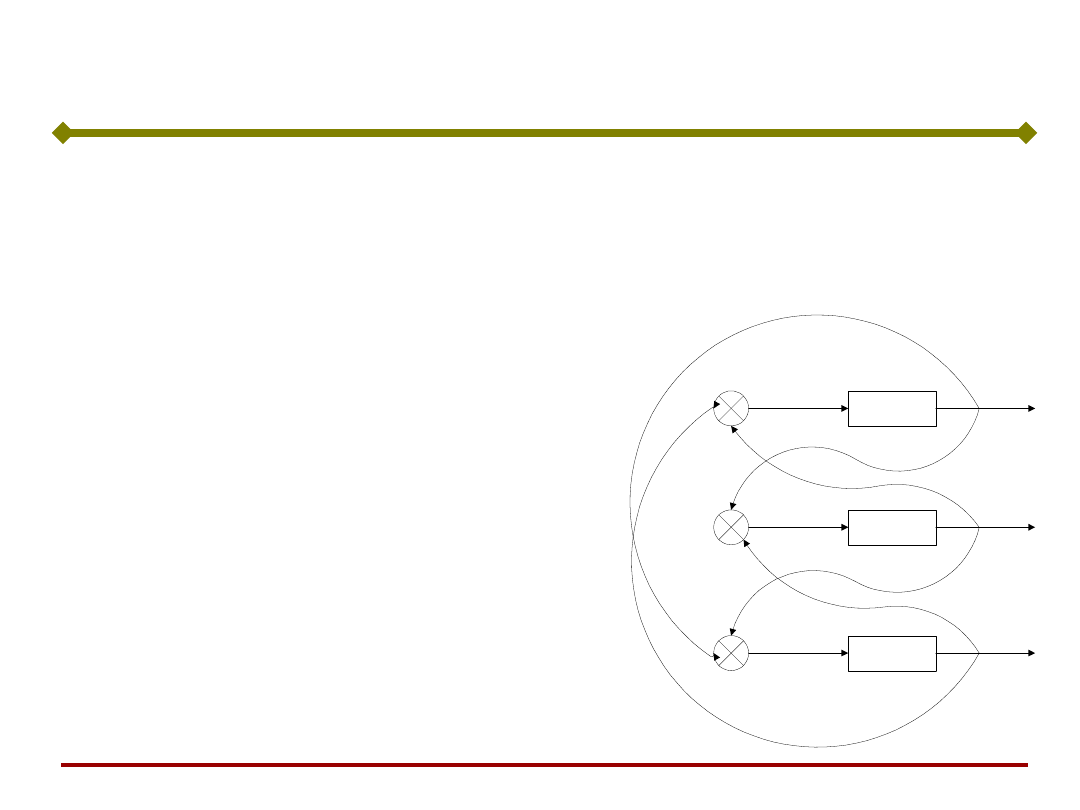
Jednorazowe pobudzenie x(0) stanowi wymuszenie
stanu początkowego. Elementy
przypominają, że
odpowiedź neuronu jest opóźniona w stosunku do
pobudzenia. Sygnał wyjściowy:
))
(
(
)
(
t
Wy
t
y
Sieci Hopfielda
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Traktując czas jako zmienną dyskretną i obserwując
zachowanie sieci w momentach
, 2
, 3
,....
Opisujemy ją jako układ dyskretny w czasie:
,...
2
,
1
,
0
),
(
1
k
Wy
y
k
k
Sieć nazywamy rekurencyjną, gdyż jej odpowiedź w
chwili k+1 zależy od całej historii pobudzeń,
poczynając od chwili k=0 i odpowiedzi są ciągiem:
)...))
(
(...
(
))
(
(
)
(
0
1
0
2
0
1
Wx
W
y
Wx
W
y
Wx
y
k
Sieci Hopfielda
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Równania powyższe opisują stan y
k
sieci w chwilach
k=1,2,... i dają ciąg przejść stanu.
Przejścia stanów sieci rozpoczynają się jej
pobudzeniem w chwili 0 sygnałem x
0
i trwają, poprzez
y
k
, k=1,2,..., aż do osiągnięcia przez sieć stanu
równowagi.
Stan równowagi
nazywany atraktorem
może być pojedynczym
stanem lub ciągiem
stanów obieganych
cyklicznie (tzw. Cyklem
granicznym).
Sieci Hopfielda
Podstawy Sztucznej
Inteligencji
Jan Kusiak
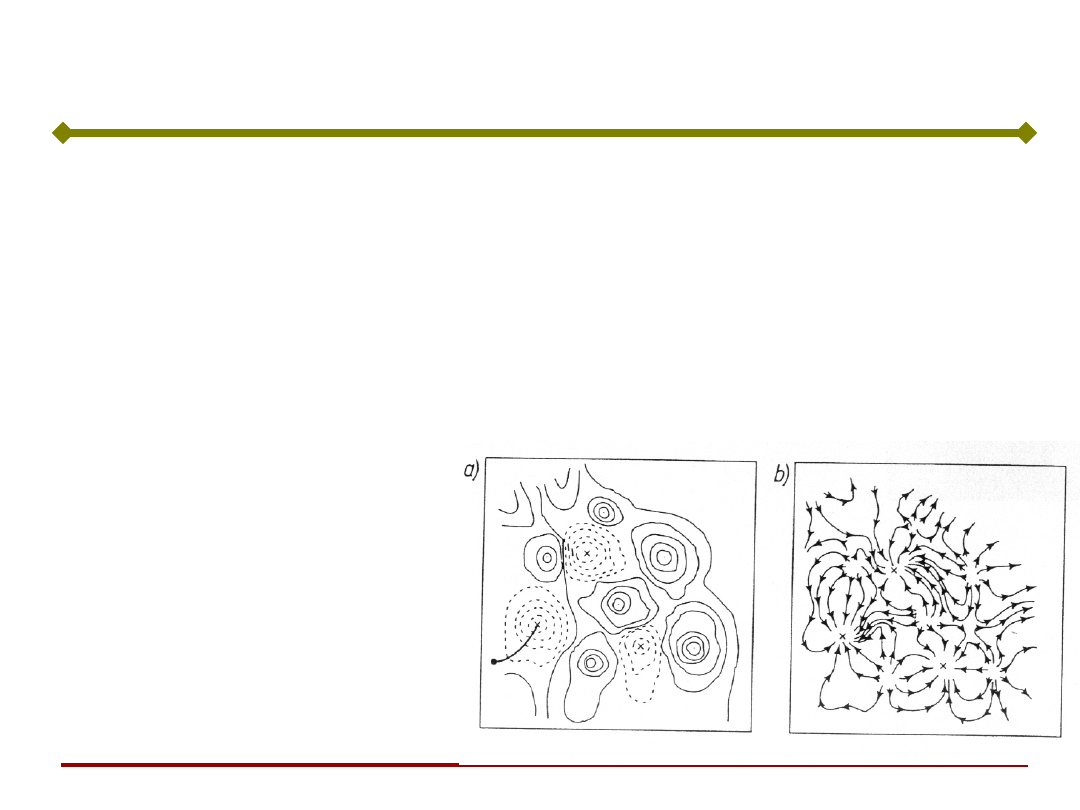
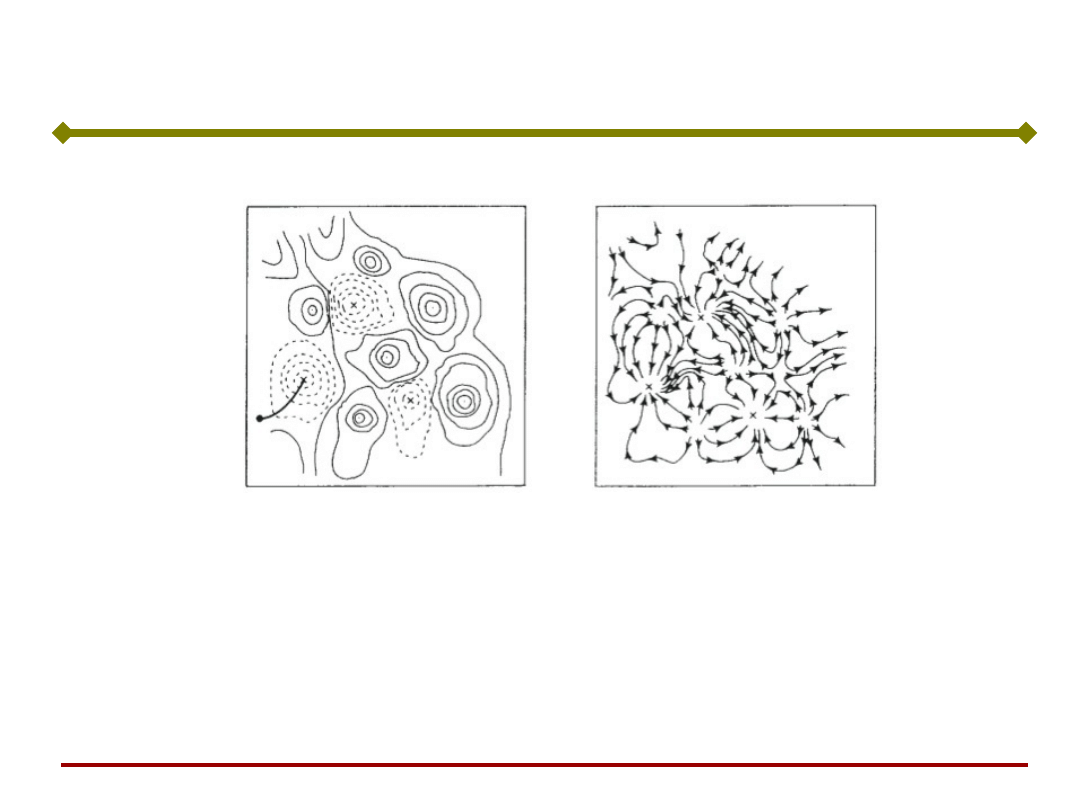
Sieci Hopfielda
W miejscu
występowania
atraktora proces
uczenia wytwarza
„studnię” w
powierzchni
reprezentującej
funkcję „energii” sieci
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sieci Hopfielda
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Trochę teorii
Podstawy Sztucznej
Inteligencji
Jan Kusiak
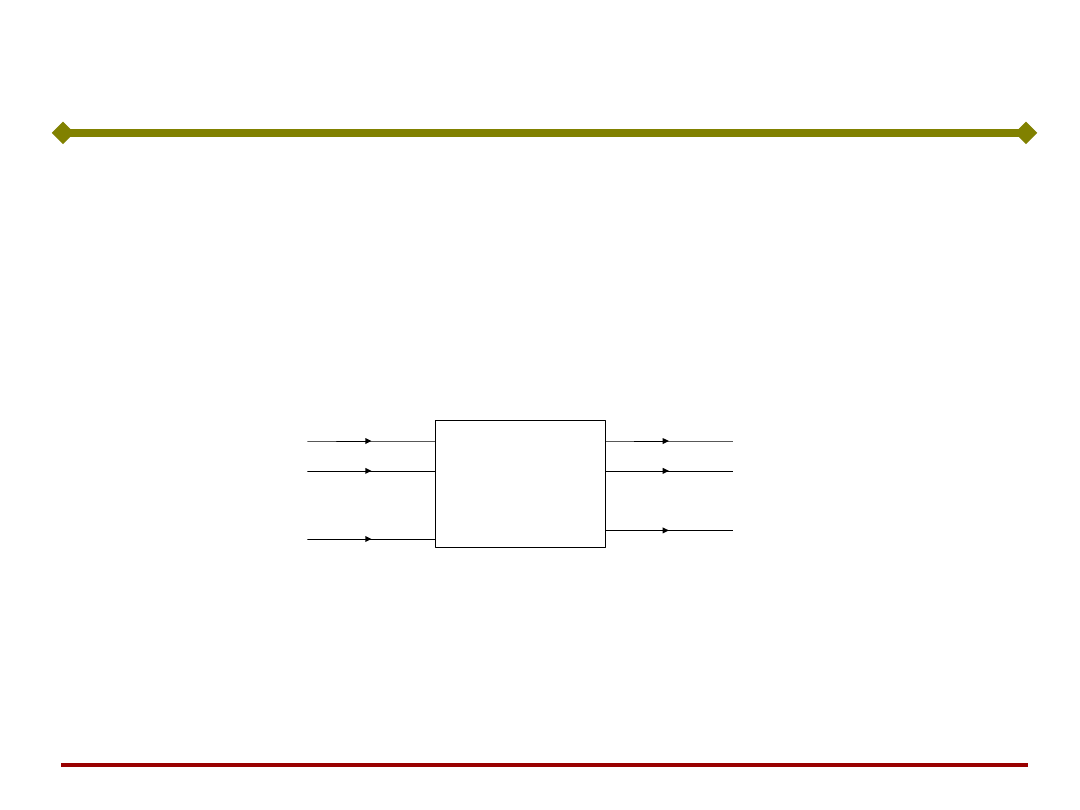
Pamięć asocjacyjna jest układem odwzorowującym
wektory x
1
, x
2
,.., x
p
należące do R
n
w wektory y
1
, y
2
,.., y
p
należące do R
m
.
Wektory x
i
i y
i
nazywane są wzorcowymi lub
prototypowymi. Schemat blokowy pamięci asocjacyjnej:
M
x
1
x
n
x
2
y
1
y
m
y
2
Y = M(x)
M - nieliniowy operator macierzowy zależny od
struktury sieci i wag neuronów.
Pamięć asocjacyjna
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Umieszczenie w pamięci wektorów wzorcowych
nazywane jest „zapisem” i pociąga za sobą odpowiednie
dobranie wag.
Odwzorowanie Y = M(x) wykonane na wektorze
wejściowym x (przy zamrożonych wagach) nazywane
jest odczytem.
Pamięć autoasocjacyjna – jeżeli asocjacje są postaci:
p
i
x
x
i
i
,
,
2
,
1
,
Pamięć asocjacyjna, c.d.
p
i
x
y
y
x
i
i
i
i
,
,
2
,
1
,
,
Pamięć heteroasocjacyjna - sieć przechowuje p
asocjacji o postaci:
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Pamięć asocjacyjna, c.d.
Ważnym zastosowaniem odwzorowania
autoasocjacyjnego jest odtwarzanie wzorców na
podstawie podawanych na wejście wzorców
zniekształconych.
Najczęściej używaną miarą odległości między
zbiorami jest miara Hamminga.
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Dla wielkości binarnych 0 i 1 odległość Hamminga
dwóch wektorów binarnych y = [y
1
, y
2
, ...., y
n
,]
T
i z =
[z
1
, z
2
, ...., z
n
,]
T
wyniosi:
d
H
(y,z)
1
2
y
i
z
i
i1
n
Miara Hamminga jest równa zeru jedynie wtedy, gdy
y = z. W przeciwnym razie jest ona równa liczbie
bitów, o które różnią się oba wektory.
Miara Hamminga
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Przykład: Odległość Hamminga dwóch wektorów:
y = [-1, -1, 1, 1]
T
i z = [-1, 1, 1, 1]
T
Miara Hamminga, c.d.
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Przykład: Odległość Hamminga dwóch wektorów:
y = [-1,
-1
, 1, 1]
T
i z = [-1,
1
, 1, 1]
T
Odległość Hamminga wynosi 1 (obydwa wektory
różnią się jednym bitem).
Miara Hamminga, c.d.
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Pamięć asocjacyjna
Zadanie: Możliwość odtwarzania przez sieć przedstawionego jej
wcześniej obrazu.
Pamięć asocjacyjna – sieć, która odtwarza zapamiętany obraz
nawet w przypadku jego zniekształcenia.
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Podstawowym zadaniem pamięci asocjacyjnej jest
zapamiętanie zbioru próbek wejściowych (uczących) w
taki sposób, aby przy prezentacji nowej próbki układ
mógł wygenerować odpowiedź, która dotyczyć będzie
jednej z zapamiętanych wcześniej próbek, położonej
najbliżej próbki testującej.
Podczas odczytu pamięć może odtworzyć oczekiwany
wzorzec, wzorzec inny niż oczekiwany lub wektor nie
należący do zbioru zapamiętanych wzorców.
Pamięć
asocjacyjna
Podstawy Sztucznej
Inteligencji
Jan Kusiak
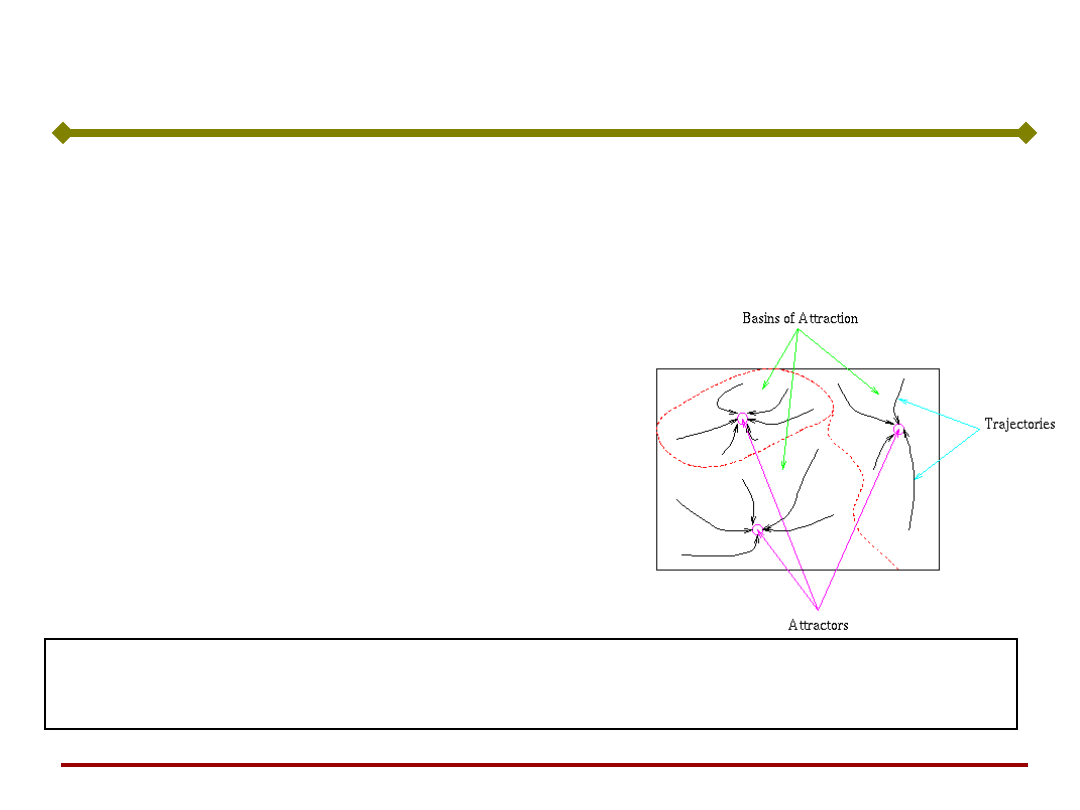
Proces uczenia sieci kształtuje obszary atrakcji
(przyciągania) poszczególnych punktów równowagi
odpowiadających danym uczącym.
W przypadku pamięci
autoasocjacyjnej występuje
wektor uczący x lub zbiór tych
wektorów, które w wyniku
przeprowadzonego uczenia
sieci ustalają położenie
poszczególnych atraktorów.
Pamięć
asocjacyjna
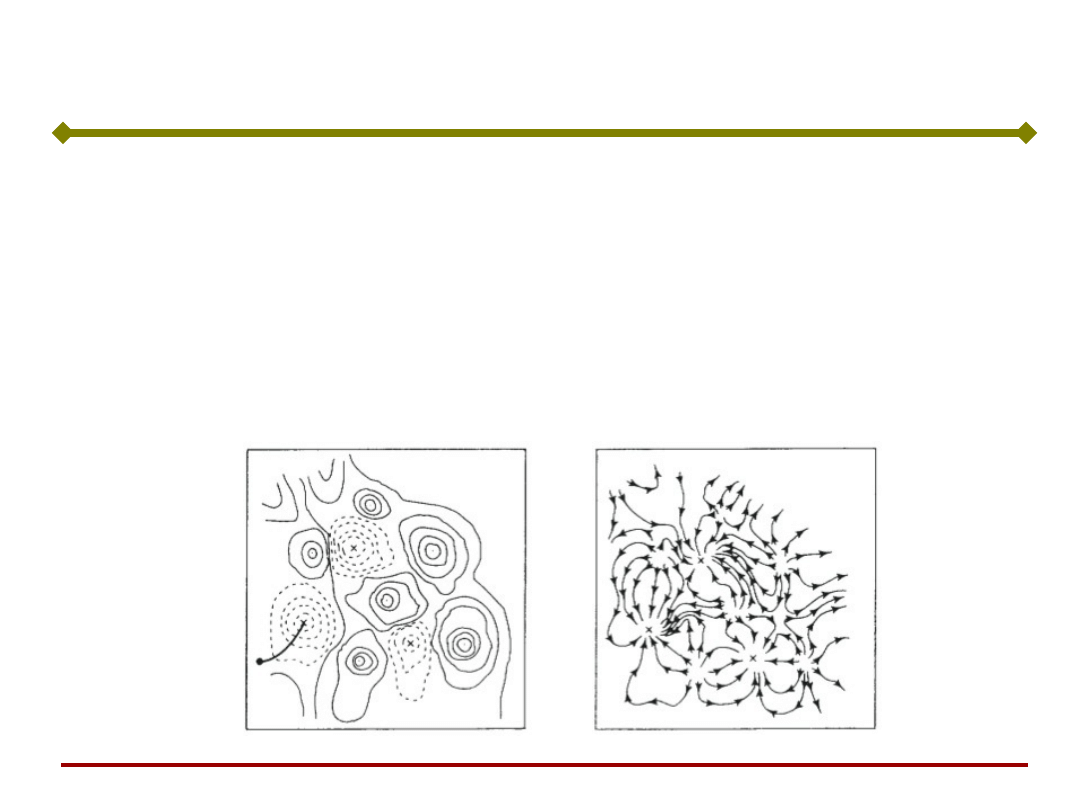
Z atraktorami w sieci Hopfielda można związać
pewne informacje.
Podstawy Sztucznej
Inteligencji
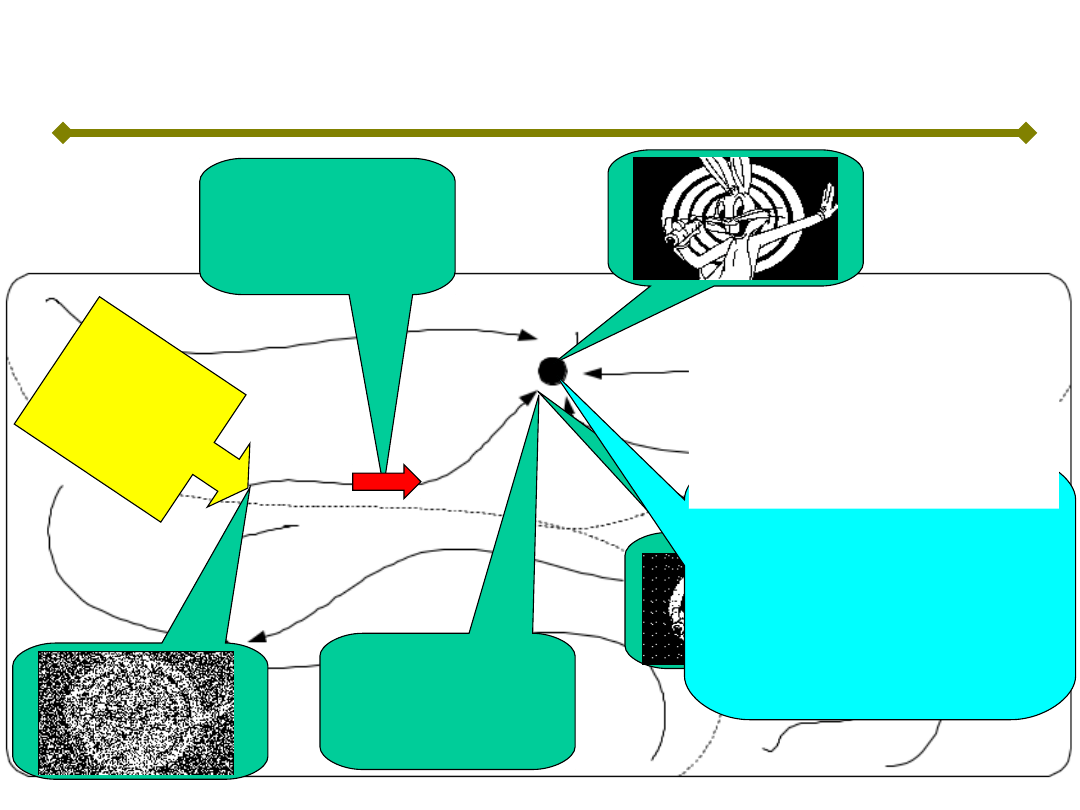
Jan Kusiak
Niech mapa
stanów sieci
Hopfielda
wygląda jak na
tym rysunku
Zestaw sygnałów
wyjściowych w
tym atraktorze
formuje taki
obrazek
Zestaw sygnałów
wyjściowych w tym
miejscu formuje
obrazek
zniekształcony, który
nie jest
atraktorem
Sieć szuka stanu
równowagi, więc
jej stan posuwa
się
w stronę
atraktora
Zestaw sygnałów
wyjściowych w
tym miejscu
formuje taki
obrazek
Tu proces
szukania
równowagi się
kończy. Sieć nie
osiąga atraktora.
Pod
aje
my
z ze
wną
trz
dan
e, k
tóre
usta
wia
ją s
ieć
w ta
kim
sta
nie
Ucząc sieć
w tym
miejscu
wytworzyliś
my atraktor
Efekt: sieć odtworzyła
prawie idealnie
zapamiętany obraz
(atraktor) na podstawie
obrazu bardzo
zakłóconego
Pamięć asocjacyjna
Wg R. Tadeusiewicza
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Przeanalizujemy prostą
sieć o bipolarnej funkcji
aktywacji. Sieć działa
synchronicznie – w
każdym takcie obliczane
są sygnały wyjściowe
neuronów.
Gdy sygnał s
i
neuronu i
wynosi 0, to jego sygnał
wyjściowy nie zmienia
się.
sgn(.)
sgn(.)
sgn(.)
-1
-1
-1
-1
1
s
1
s
2
s
3
y
1
y
2
y
3
1
Prosta pamięć asocjacyjna
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Załóżmy, że w chwili początkowej sygnały wyjściowe neuronów
wynoszą:
1
3
2
1
y
y
y
Wtedy sygnały wejściowe
neuronów wynoszą odpowiednio:
2
0
3
2
1
s
s
s
Ponieważ założyliśmy, że gdy sygnał s
i
wynosi 0, to sygnał wyjściowy nie
zmienia się, po pierwszym takcie nowe
sygnały wyjściowe neuronów wynoszą:
1
1
3
2
1
y
y
y
sgn(.)
sgn(.)
sgn(.)
-1
-1
-1
-1
1
s
1
s
2
s
3
y
1
y
2
y
3
1
Prosta pamięć asocjacyjna
Podstawy Sztucznej
Inteligencji
Jan Kusiak
W następnym takcie i w dalszych
sygnały wyjściowe nie ulegają już
zmianie, ponieważ wtedy sygnały
wejściowe wszystkich trzech
neuronów wynoszą:
wymusza to ponownie sygnały
wyjściowe
2
2
3
2
1
s
s
s
1
1
3
2
1
y
y
y
sgn(.)
sgn(.)
sgn(.)
-1
-1
-1
-1
1
s
1
s
2
s
3
y
1
y
2
y
3
1
Prosta pamięć asocjacyjna
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Wszystkie możliwe
sygnały wejściowe
sieci i odpowiadające
im sygnały zebrano
w tablicy:
y
1
y
2
y
3
s
1
s
2
s
3
y
1
’
y
2
’
y
3
’
-1 -1 -1 0 0 2
-1 -1 1
-1 -1 1 -2 -2 2
-1 -1 1
-1 1 -1 2 0 0
1 1 -1
-1 1 1 0 -2 0
-1 -1 1
1 -1 -1 0 2 0
1 1 -1
1 -1 1 -2 0 0
-1 -1 1
1 1 -1 2 2 -2
1 1 -1
1 1 1 0 0 -2
1 1 -1
Prosta pamięć asocjacyjna
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Na rysunku przedstawiono
wynikający z tablicy fragment
grafu przejść stanów sieci.
P
1
P
0
P
4
P
5
P
6
P
2
P
7
P
3
(1,-1,-1)
(1,1,1)
(1,1,-1)
(-1,1,-1)
(-1,1,1)
(-1,-1,1)
(1,-1,1)
(-1,-1,-1)
Sieć ma 2 stany stabilne:
(1,1,-1) i (-1,-1,1) do
których dochodzi startując
z dowolnego stanu
początkowego. Można więc
uznać, że sieć pamięta 2
stany.
Prosta pamięć asocjacyjna
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sieć taka może rozpoznać zniekształcony obraz
Prosta pamięć asocjacyjna
Podstawy Sztucznej
Inteligencji
Jan Kusiak
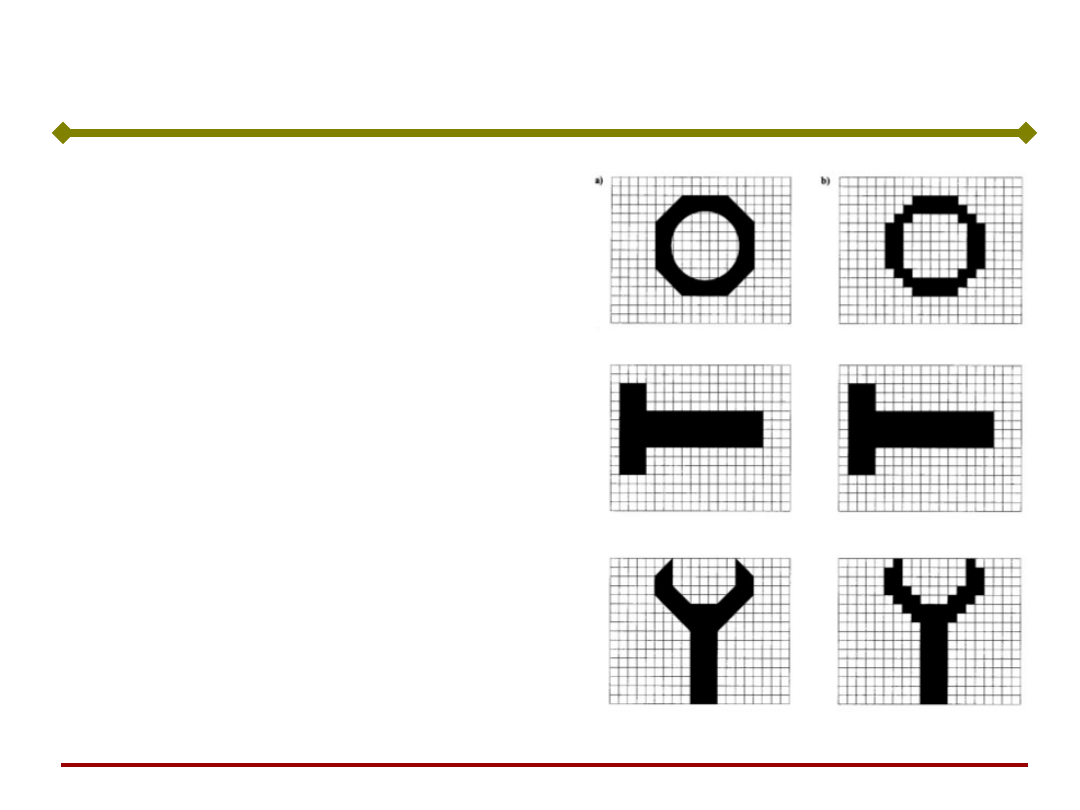
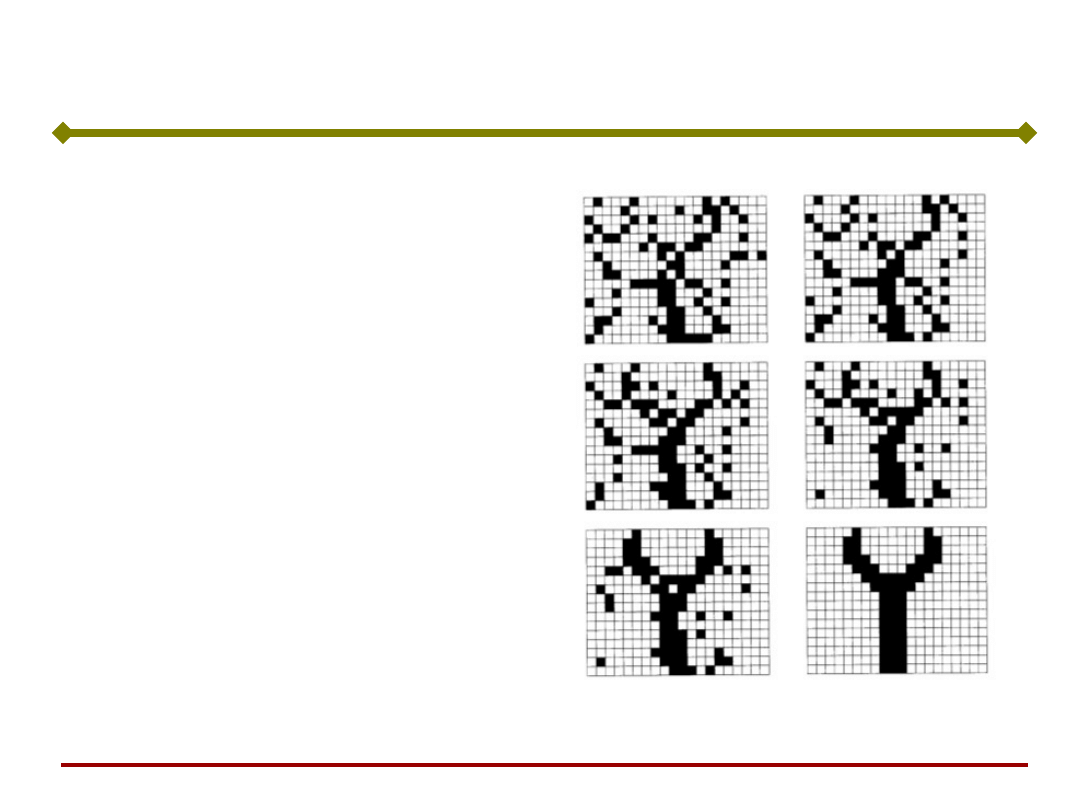
Przedstawiona koncepcja
pamięci łatwo można
rozszerzyć na praktyczne
zastosowanie.
Przykład zastosowań
Pierwszym krokiem jest
przedstawienie rzeczywistego
obrazu za pomocą siatki o polach
białych i czarnych.
Sieć ma pamiętać 3 obrazy:
nakrętka, nit i klucz,
przedstawione na tle siatki o
wymiarach m x n .
Podstawy Sztucznej
Inteligencji
Jan Kusiak
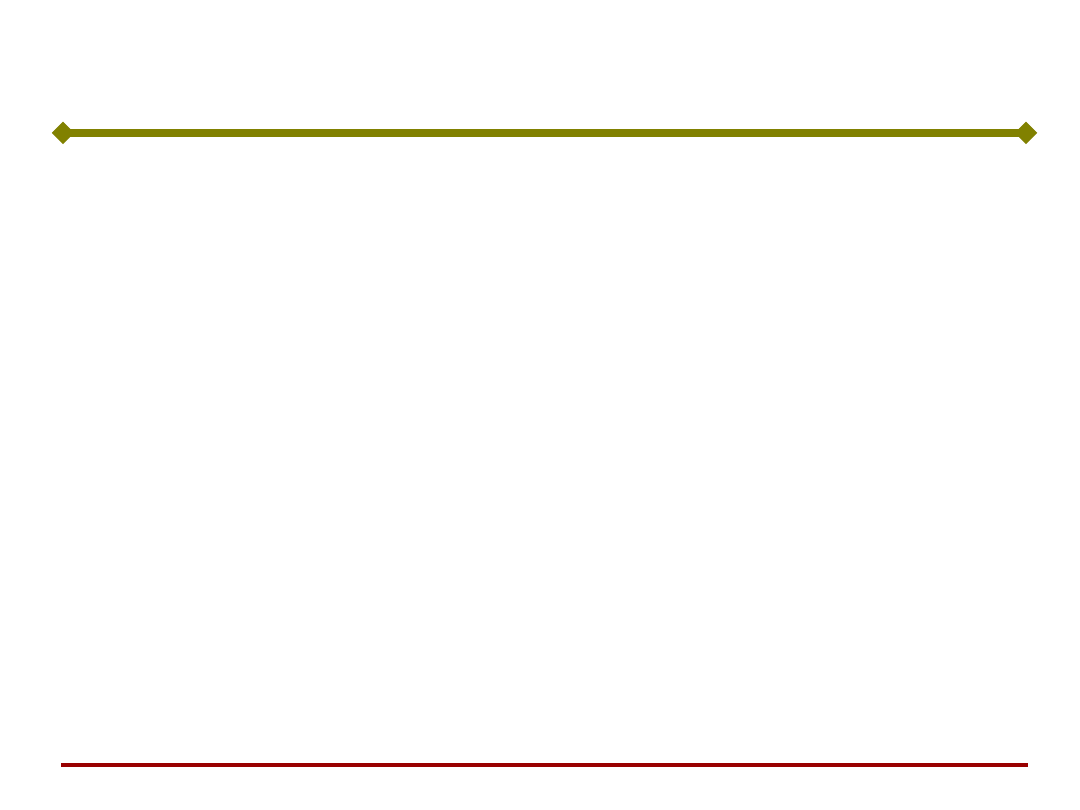
Przykład zastosowań, c.d.
Rozpoczynając od dowolnego
stanu początkowego na
wyjściu, sieć po przejściu
pewnej liczby stanów
pośrednich powinna
zatrzymać się w jednym ze
stanów stabilnych.
Sieć może rozpoznać
zniekształcony obraz.
Sieć ta będzie posiadać 3 stany
stabilne odpowiadające trzem
obrazom.
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Proces uczenia sieci kształtuje obszary atrakcji
(przyciągania) poszczególnych punktów równowagi
odpowiadających danym uczącym.
Uczenie sieci neuronowej realizującej pamięć
asocjacyjną ma za zadanie taki dobór wag W
ij
poszczególnych neuronów, aby na etapie „odczytu”
(przy zamrożonych wagach) sieć była zdolna odnaleźć
zbiór danych, najbliższy w sensie Hamminga,
wektorowi testowemu.
Uczenie pamięci asocjacyjnej
Podstawy Sztucznej
Inteligencji
Jan Kusiak
W przypadku pamięci autoasocjacyjnej występuje
wektor uczący x lub zbiór tych wektorów, które w
wyniku przeprowadzonego uczenia sieci ustalają
położenie poszczególnych atraktorów.
Uczenie pamięci asocjacyjnej, c.d.
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sieć Hopfielda
- przykład działania
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sieć Hopfielda
Jednorazowe
pobudzenie x
0
ma
sens wymuszenia
stanu początkowego.
Elementy
przypominają, że
odpowiedź neuronu
jest opóźniona w
stosunku do
pobudzenia.
Sygnał wyjściowy:
))
(
(
)
(
t
Wy
t
y
Podstawy Sztucznej
Inteligencji
Jan Kusiak
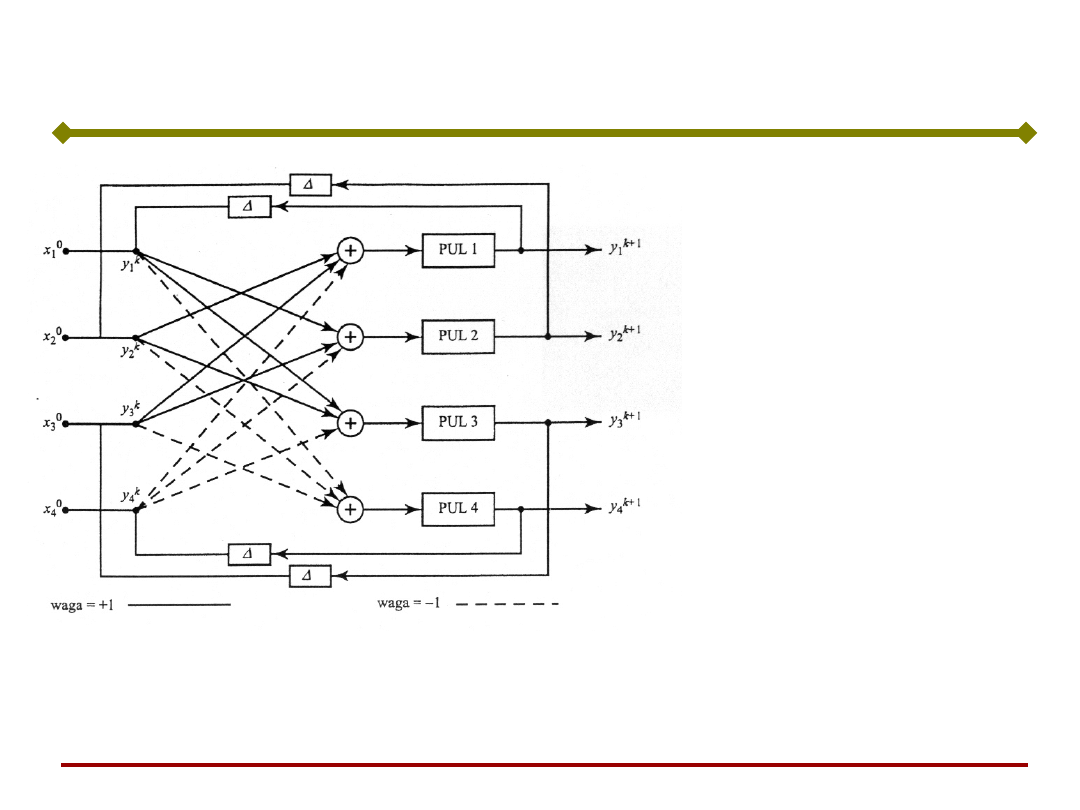
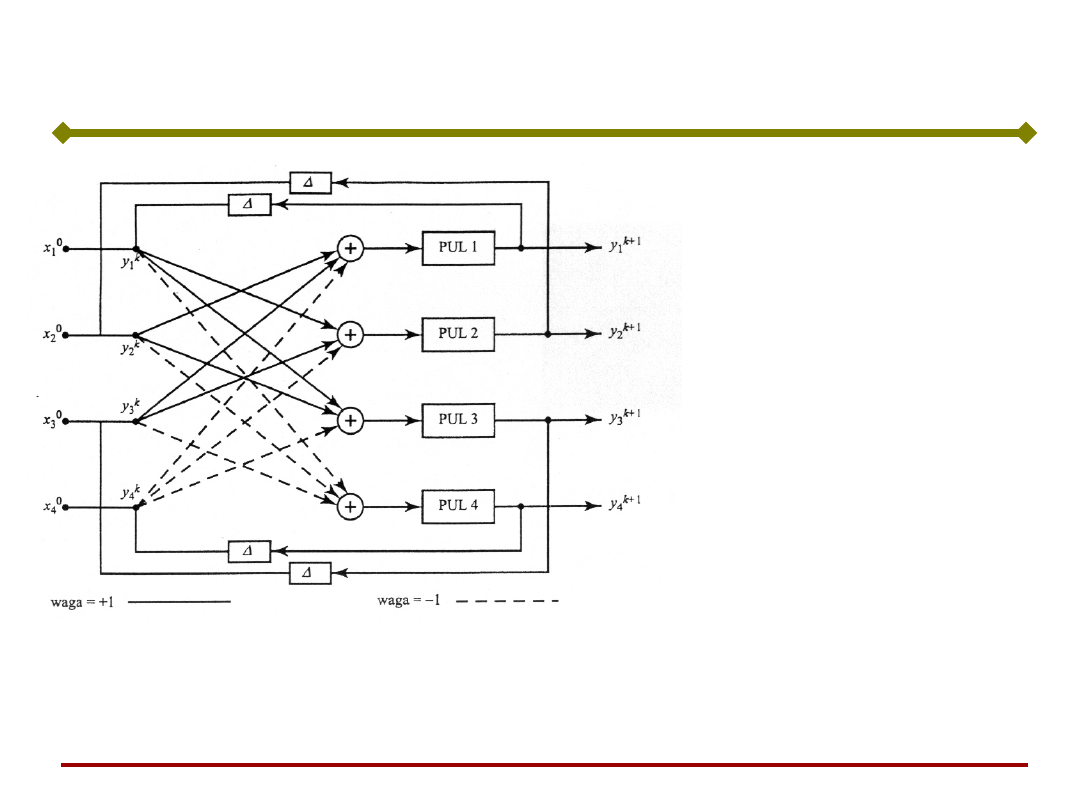
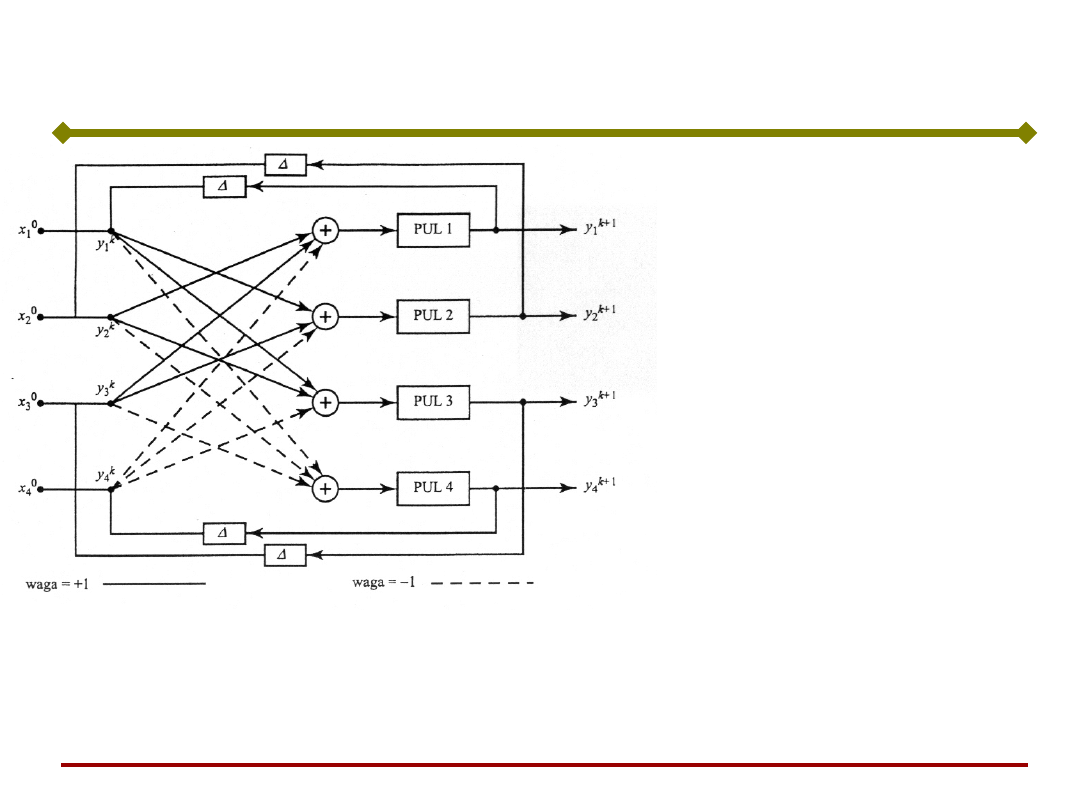
Sieć Hopfielda – prosty przykład
działania
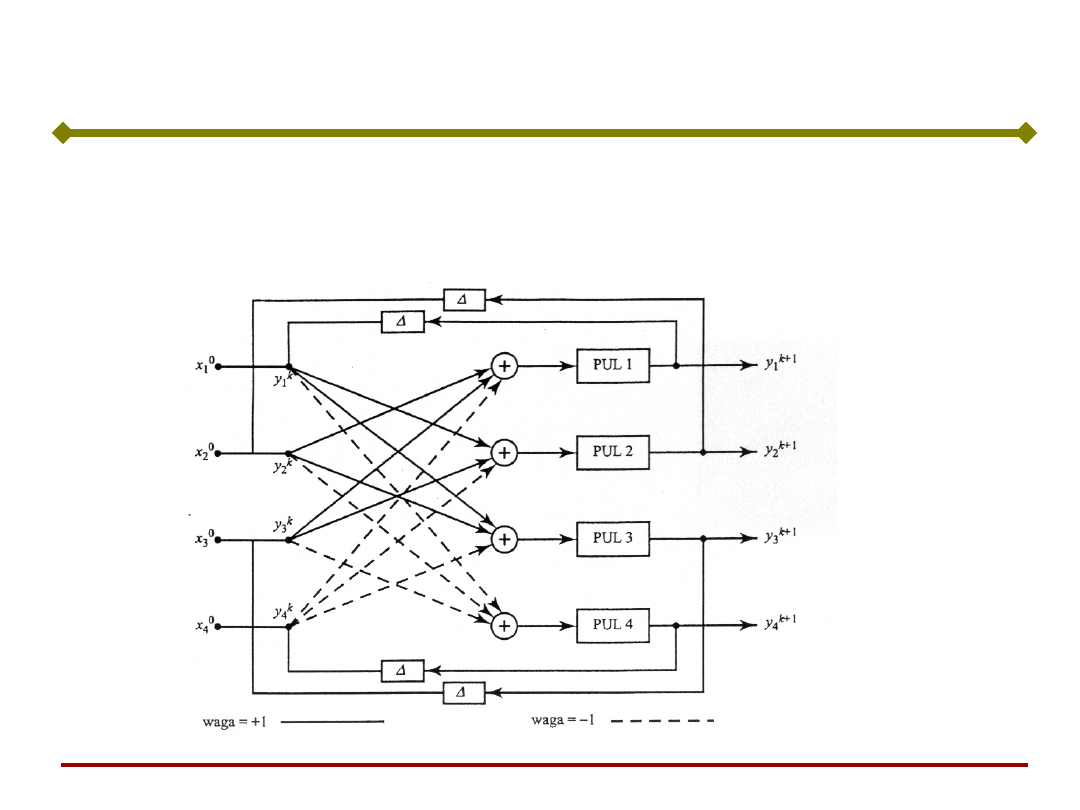
Przeanalizujemy sieć
rekurencyjną
złożoną z 4
neuronów o
binarnych,
bipolarnych
funkcjach aktywacji.
Zilustrujemy pojęcie
przejść stanu
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sieć Hopfielda – prosty przykład
działania
Macierz wag:
0
1
1
1
1
0
1
1
1
1
0
1
1
1
1
0
W
Każdy ciąg przejść kończy się jednym z dwóch
wektorów (punkty równowagi stabilnej – atraktory):
,
]
1
1
1
1
[
,
]
1
1
1
1
[
2
1
T
T
y
y
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sieć Hopfielda – prosty przykład
działania
Łatwo sprawdzić, że żaden ze stanów równowagi nie
wywołuje dalszych przejść. Podstawiając x
0
= y
1
otrzymujemy w pierwszym kroku rekurencji:
€
y
1
=ϕ(Wx
0
)=ϕ
0
1
1 −1
1
0
1 −1
1
1
0 −1
−1 −1 −1 0
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
1
1
1
−1
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
⎛
⎝
⎜
⎜
⎜
⎜
⎞
⎠
⎟
⎟
⎟
⎟
=
sgn(3)
sgn(3)
sgn(3)
sgn(−3)
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
=y
1
i ogólnie, y
k+1
= y
k
= y
1
.
Podobnie, gdy stanem początkowym jest x
0
= y
2
,
wówczas y
1
= ....= y
2
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sieć Hopfielda – prosty przykład
działania
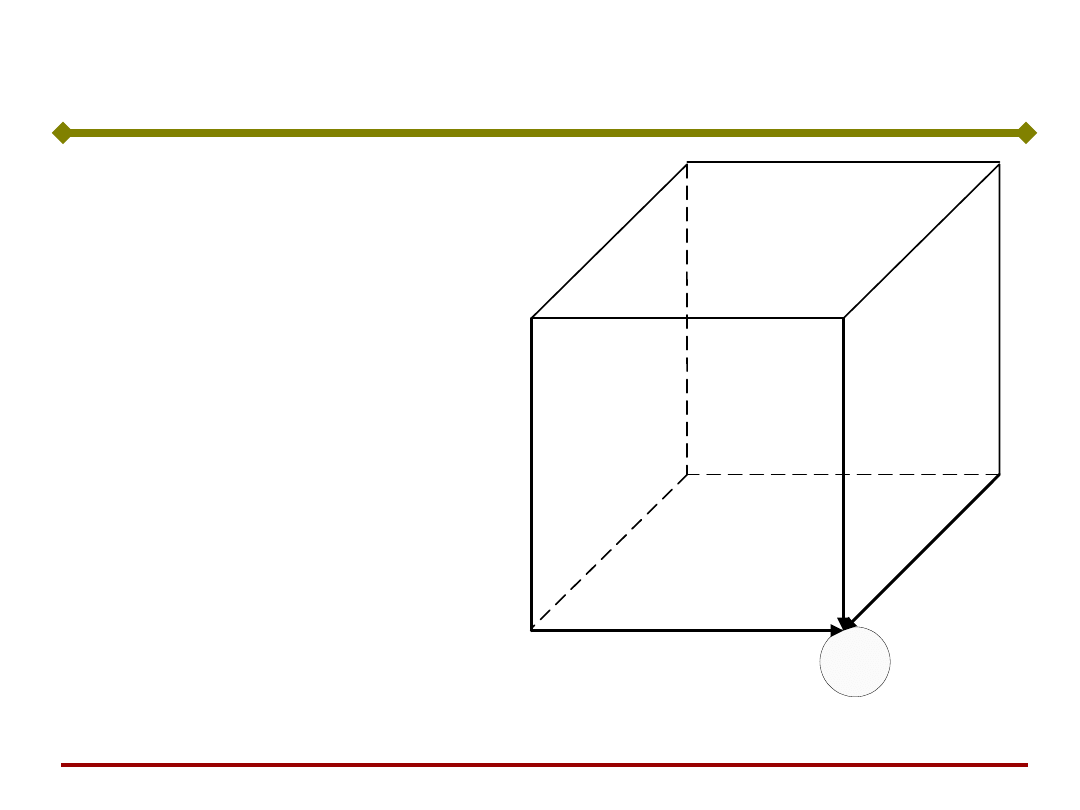
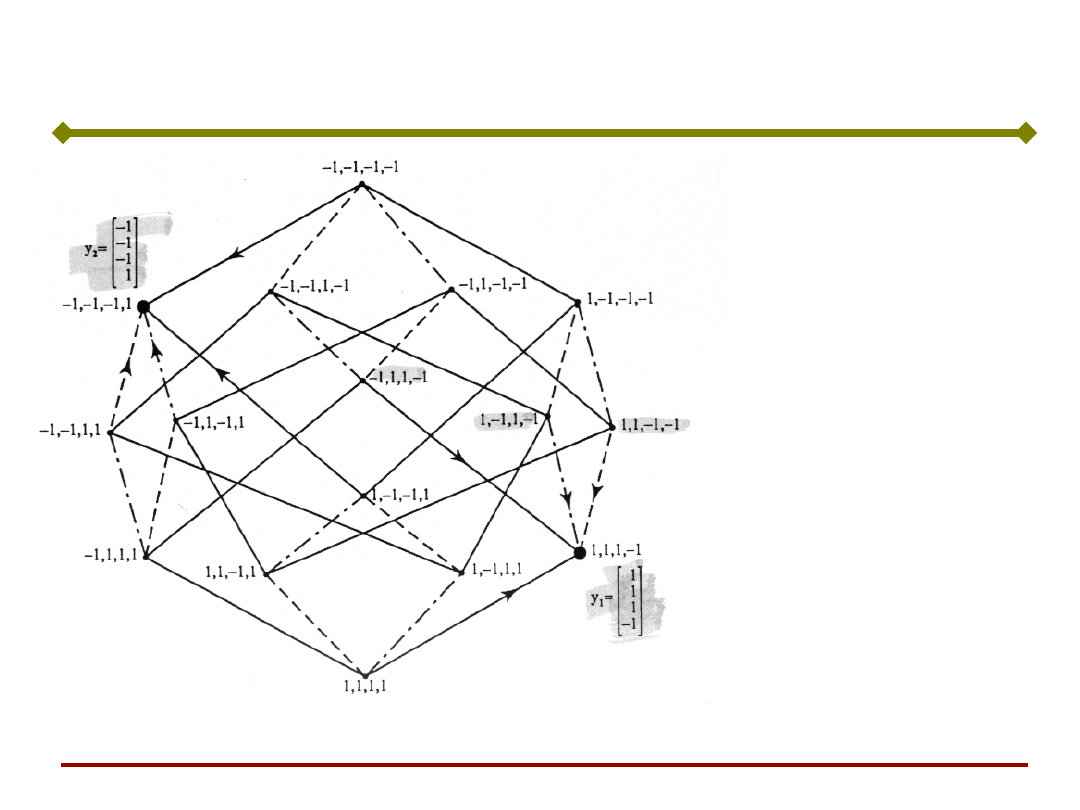
Wierzchołki
czterowymiarowego
hipersześcianu
reprezentują
wartości wektora
stanu i możliwe
przejścia stanu sieci.
W każdym
wierzchołku
zbiegają się 4
krawędzie, łączące
go z sąsiednimi
wierzchołkami,
reprezentującymi
wektory różniące się
wartością tylko
jedną składową.
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sieć Hopfielda – prosty przykład
działania
Przyjmijmy, że stanem początkowym jest stan
sąsiadujący z y
1
. Następnym stanem będzie:
T
x
]
1
1
1
1
[
0
T
y
)]
3
sgn(
)
1
sgn(
)
1
sgn(
)
1
[sgn(
1
czyli nastąpi przejście do najbliższego punktu
równowagi:
T
T
]
1
1
1
1
[
]
1
1
1
1
[
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sieć Hopfielda – prosty przykład
działania
Można sprawdzić, że również dla każdego ze stanów
początkowych
sieć przejdzie do stanu y
1
= y
1
i w nim pozostanie.
W omówionych przypadkach następuje zbieżność stanu
początkowego do stanu równowagi odległego tylko o
jeden (różniącego się tylko jednym bitem).
Jeśli stan początkowy różni się dwoma bitami od obu
stanów równowagi, czyli jest od nich jednakowo
odległy, to zbieżność do każdego z nich jest równie
prawdopodobna.
T
T
T
x
x
x
]
1
1
1
1
[
,
]
1
1
1
1
[
,
]
1
1
1
1
[
0
0
0
Podstawy Sztucznej
Inteligencji
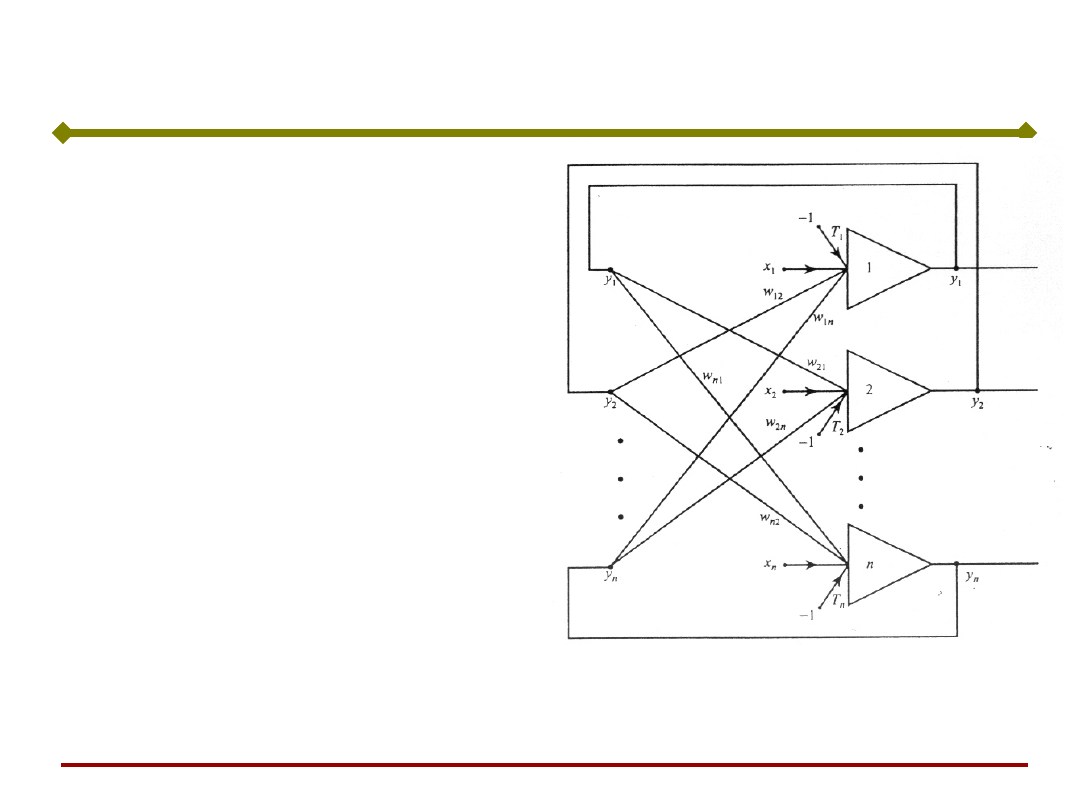
Jan Kusiak
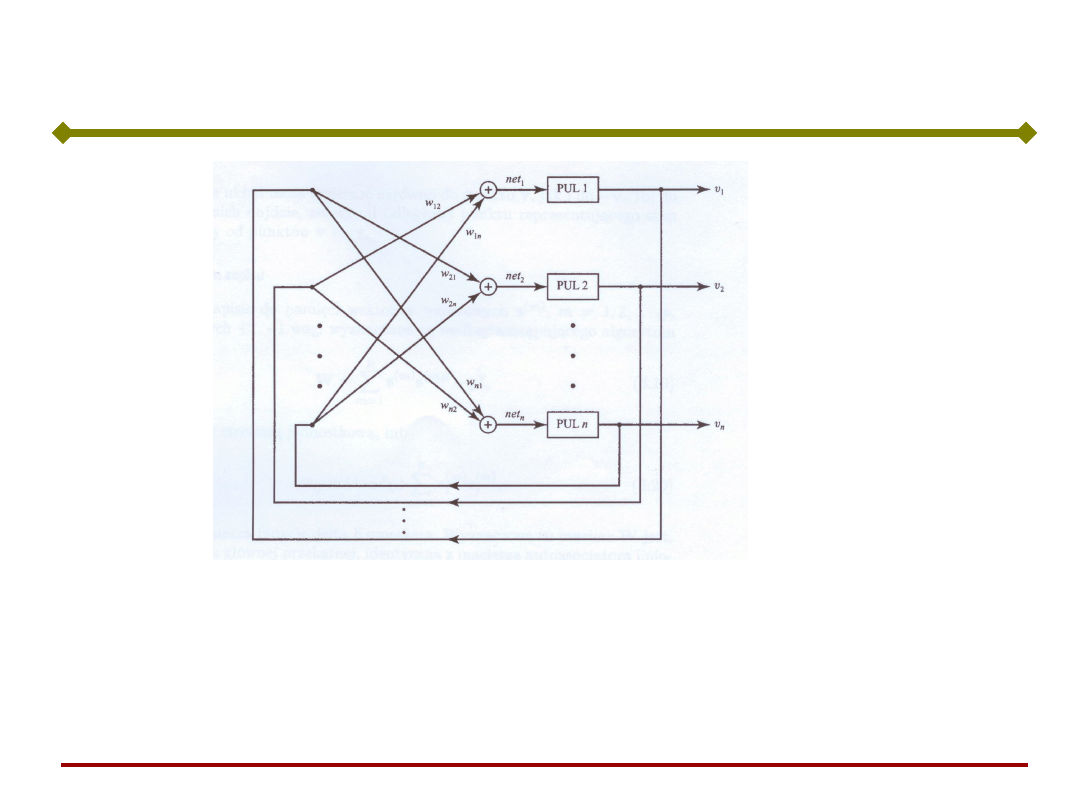
Wracamy do sieci
Hopfielda złożonej z n
neuronów z progami T
i
pobudzanych zarówno
sygnałami z zewnątrz jak i
sygnałami sprzężenia
zwrotnego od innych
neuronów, wg wzoru:
n
i
T
x
y
w
s
i
i
T
i
i
,
,
2
,
1
,
Sieć Hopfielda
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Wektory wagowy i wyjściowy dane są jako:
T
n
def
T
in
ii
i
i
def
i
y
y
y
y
w
w
w
w
w
2
1
1
2
1
,
]
0
[
Definiując wektory: pobudzeń s, wejściowy x oraz
progowy T analogicznie jak wektor wyjściowy,
możemy opisać liniową część sieci zależnością
macierzową:
T
x
Wy
s
Sieć Hopfielda
0
0
0
2
1
2
21
1
12
2
1
n
n
n
n
T
n
T
T
w
w
w
w
w
w
w
w
w
W
Podstawy Sztucznej
Inteligencji
Jan Kusiak
W modelu Hopfielda zakłada się, że macierz wag jest symetryczna,
tzn. w
ij
= w
ji
Wyjście dowolnego neuronu połączone jest poprzez wagi z
wejściami pozostałych neuronów, ale nie jest połączone z jego
własnym wejściem.
Dla funkcji aktywacji typu signum, przejścia stanów zachodzą
zgodnie z rekurencyjną zależnością:
,
2
,
1
),
sgn(
1
k
T
x
y
w
y
i
i
k
T
i
k
i
przy czym zakłada się, że ma ona charakter asynchroniczny, co
oznacza, że w danej chwili ma miejsce aktualizacja tylko jednej
spośród i = 1,2,....,n składowych.
Sieć Hopfielda
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Dla oceny stabilności rozważanej sieci dynamicznej
wprowadza się tak zwaną funkcję energetyczną
(funkcję stanu) dodatnią i ograniczoną w przestrzeni
wyjść. Funkcja energetyczna jest formą kwadratową:
y
T
y
x
Wy
y
E
T
T
T
def
2
1
i
n
j
i
i
n
i
i
j
i
n
i
j
j
i
ij
def
y
T
y
x
y
y
w
E
1
1
1
,
2
1
lub w postaci rozwiniętej:
Układ stabilizuje się w punkcie w którym funkcja
energetyczna przyjmuje wartość minimum.
Sieć Hopfielda
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Rozważmy stany przejściowe i związane z nimi
zmiany energii w sieci jednowarstwowej z
poprzedniego przykładu.
Sieć Hopfielda
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Dla zerowych progów i sygnałów wejściowych oraz
macierzy wag
Sieć Hopfielda
0
1
1
1
1
0
1
1
1
1
0
1
1
1
1
0
W
Funkcja energetyczna ma postać:
4
3
2
1
4
3
2
1
0
1
1
1
1
0
1
1
1
1
0
1
1
1
1
0
2
1
)
(
y
y
y
y
y
y
y
y
y
E
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Po uporządkowaniu, funkcja energetyczna przyjmuje
postać:
Sieć Hopfielda
4
3
4
3
2
4
3
2
1
)
(
)
(
)
(
y
y
y
y
y
y
y
y
y
y
E
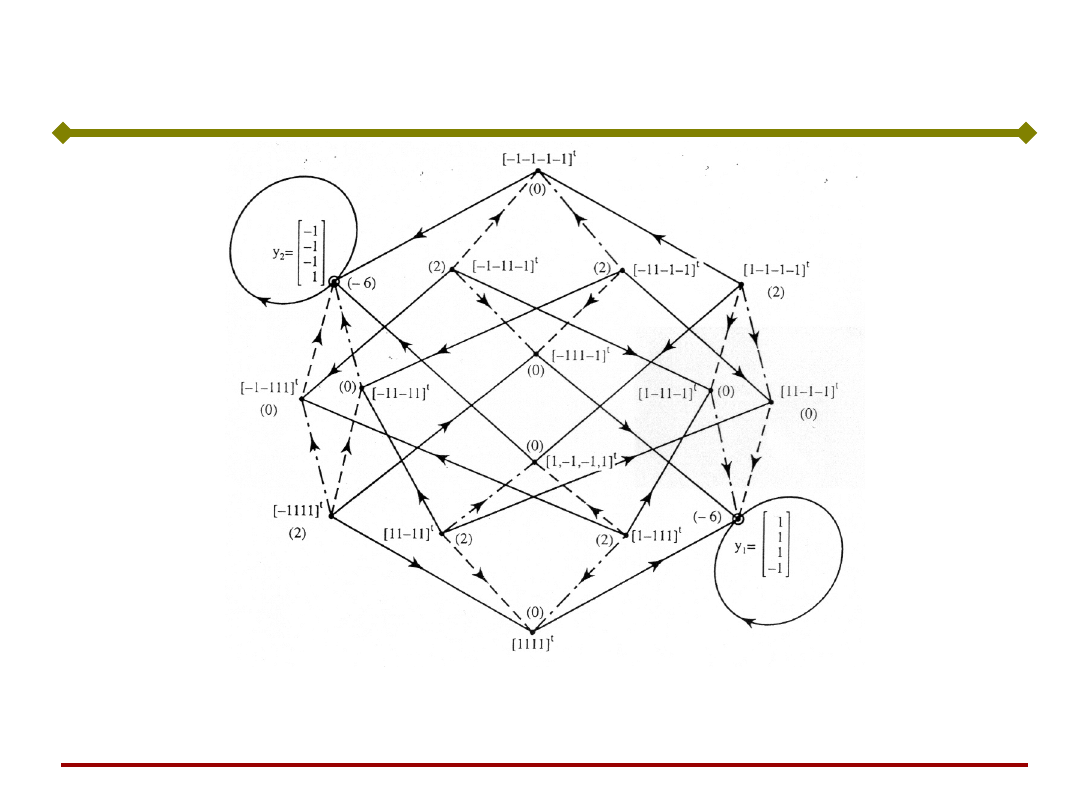
Sieć osiąga dyskretne poziomy energetyczne o
wartościach –6, 0 i 2, co można łatwo wyliczyć jako
energię dla każdego ze stanów począwszy od [-1 –1 –1 –
1]
T
, a kończąc na [1 1 1 1]
T
.
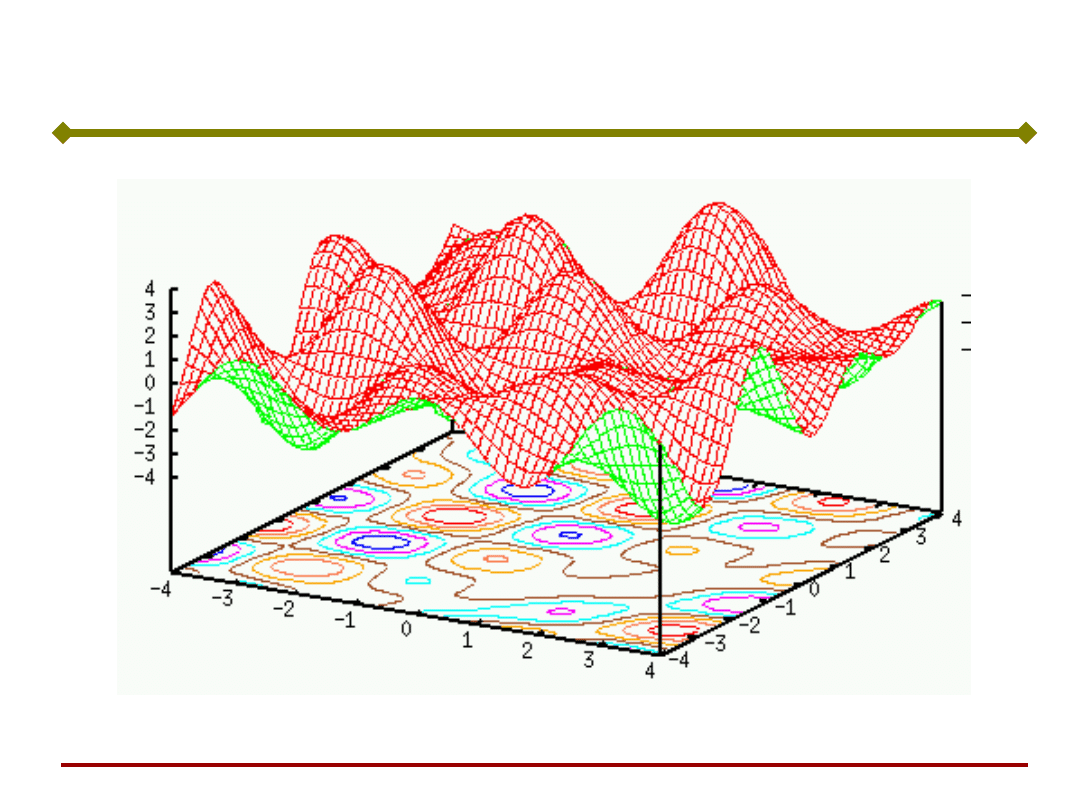
Podstawy Sztucznej
Inteligencji
Jan Kusiak
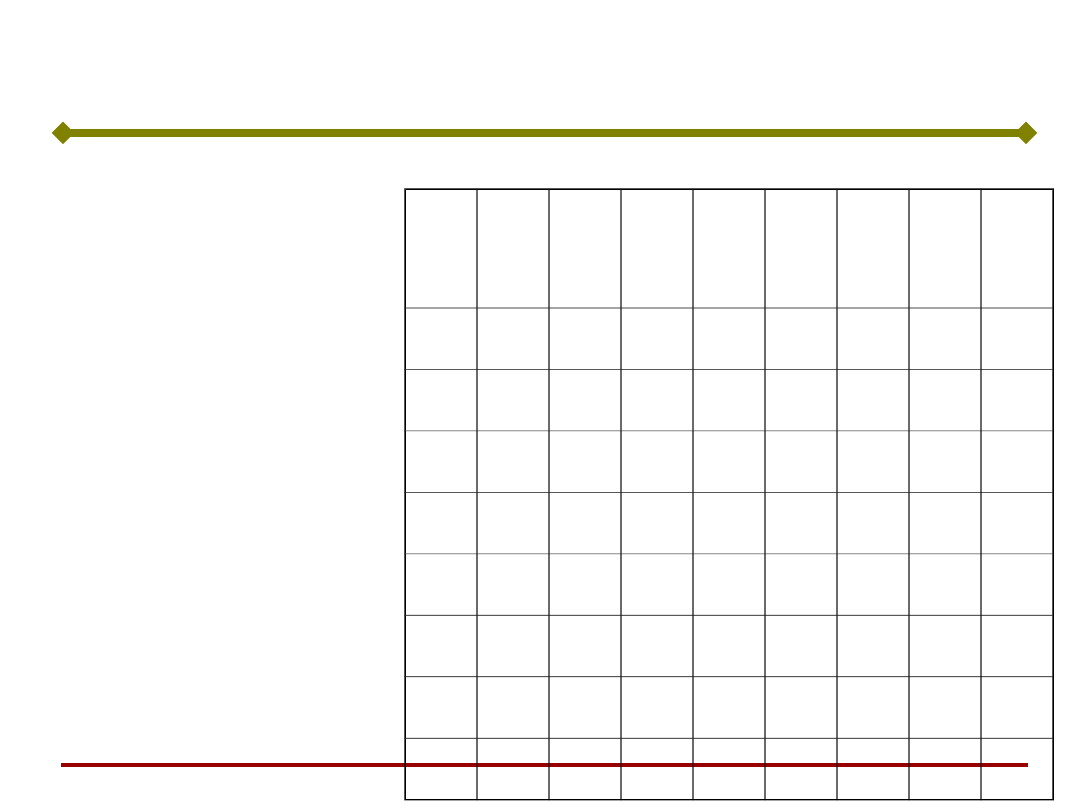
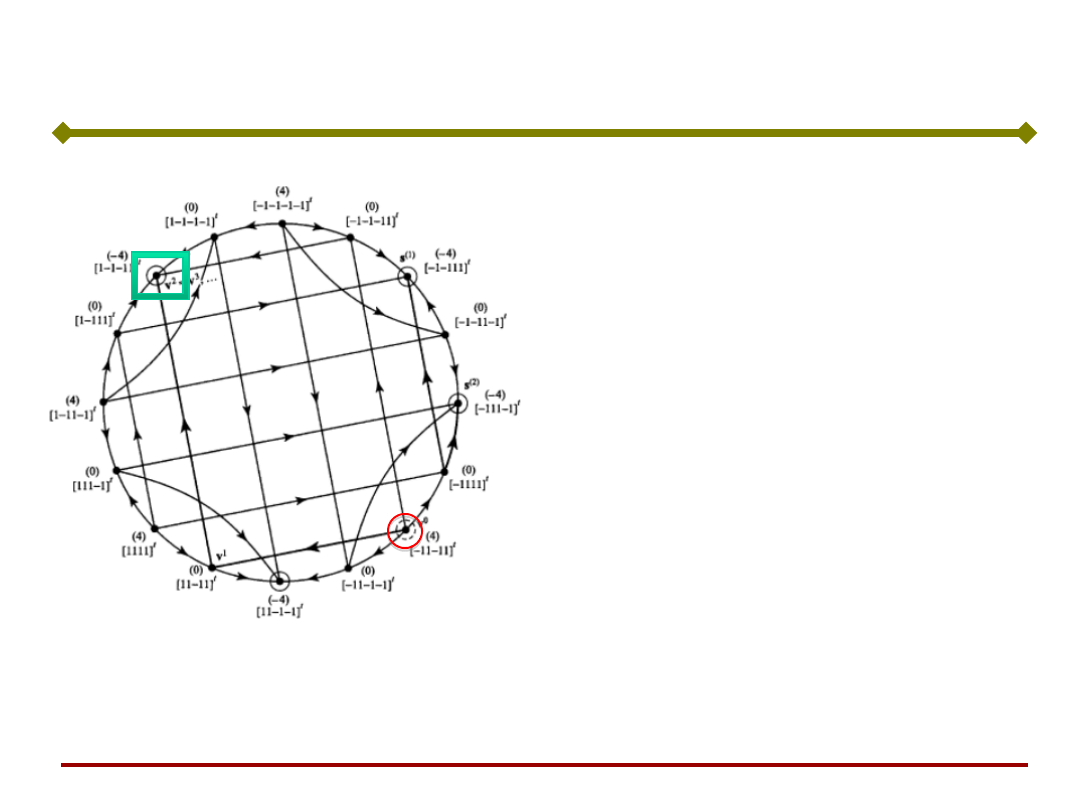
Na rysunku zaznaczono energie obliczone dla każdego z 2
4
wierzchołków hipersześcianu, reprezentujących stany
analizowanej sieci. Energia przyjmuje wartość minimalną dla
stanów równowagi y
1
= [1 1 1 –1]
T
lub y
2
= [-1 –1 –1 1]
T
.
Sieć Hopfielda
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sieci Hopfielda
•Proces odczytu (odtwarzania)
•Proces zapisu (uczenia)
Podstawy Sztucznej
Inteligencji
Jan Kusiak
W trybie odczytu (odtwarzania), przy zamrożonych
wartościach wag i założeniu określonego stanu
początkowego neuronów v(0) = x następuje proces
przejściowy, przebiegający zgodnie z zależnością:
€
v
i
k+1
=sgn w
ij
j=1
n
∑
v
j
k
(
)
Funkcja energii wynosi:
Uczenie sieci Hopfielda - odczyt
(1)
k – numer kroku, i – numer neuronu, którego stan
ulega zmianie (założone zerowe sygnały progowe
oraz wymuszenia zewn.)
€
E(v)=−
1
2
v
T
Wv
Podstawy Sztucznej
Inteligencji
Jan Kusiak
W trybie zapisu (uczenia) na podstawie zadanych
wzorców uczących dobierane są wagi w
ij
.
Uczenie sieci Hopfielda –zapis
Przy zapisie do pamięci wektorów wzorcowych s
(m)
,
m=1,2,...,p o składowych +1, -1, wagi wyznaczane są
wg algorytmu Hebba:
€
W= s
(m)
(s
(m)
)
T
−pI
m=1
p
∑
lub:
€
w
ij
=(1−δ
ij
) s
i
( m)
s
j
(m)
m=1
p
∑
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Uczenie sieci Hopfielda – algorytm
Danych jest p wektorów wzorcowych bipolarnych:
€
W← 0
Gdzie s
(m)
ma wymiar n x 1, m = 1, 2, ..., p.
Początkowy wektor stanu v
(0)
ma wymiar n x 1
€
{s
(1)
,s
(2)
,K ,s
( p)
}
Zapis
Krok 1: Podstawienie
Macierz W ma wymiar n x n
Krok 2: Dla m = 1, ..., p
€
W← s
(m)
s
( m)T
−I
Krok 3: Zapis wektorów do pamięci zakończony.
W jest macierzą wag.
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Uczenie sieci Hopfielda – algorytm
Odczyt
Krok 1: Założenie stanu początkowego v
(0)
= x
Krok 2: Ustawienie liczb 1, 2 ..., n w losowej kolejności α
1,
α
2,
..., α
n
€
v'
α
i
=sgn w
α
i
j
v
j
j=1
n
∑
(
)
Krok 3: Dla i = 1, ..., n wykonanie:
Krok 4: Jeżeli
€
v'
α
i
=v
α
i
dla i = 1,2, ..., n
czyli w danym cyklu nie było zmian, to
koniec odczytu i uznanie otrzymanych
sygnałów za sygnały wyjściowe.
W przeciwnym razie powrót do Kroku 2.
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sieć Hopfielda – przykład
Sieć pamiętająca dwa wektory:
€
s
(1)
=[−1−111]
T
€
W=
0 0 −2 0
0 0 0 −2
−2 0 0 0
0 −2 0 0
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
Funkcja energii:
€
s
(2)
=[−111−1]
T
Obliczona zgodnie z algorytmem macierz wag:
€
E(v)=2(v
1
v
3
+v
2
v
4
)
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sieć Hopfielda – przykład
Uwaga:
Asynchroniczne uaktualnianie stanu powoduje, że
wartość funkcji energii nie rośnie i sieć osiąga
jedno z lokalnych minimów energii.
Energia układu dla wektora komplementarnego E(-
v) = E(v).
Wartość minimum energii jest taka sama dla
wektorów komplementarnych.
Wniosek:
Układ może zmierzać zarówno do v jak i do –v.
Dojdzie do tego, który jest bliżej stanu początkowego.
Podstawy Sztucznej
Inteligencji
Jan Kusiak
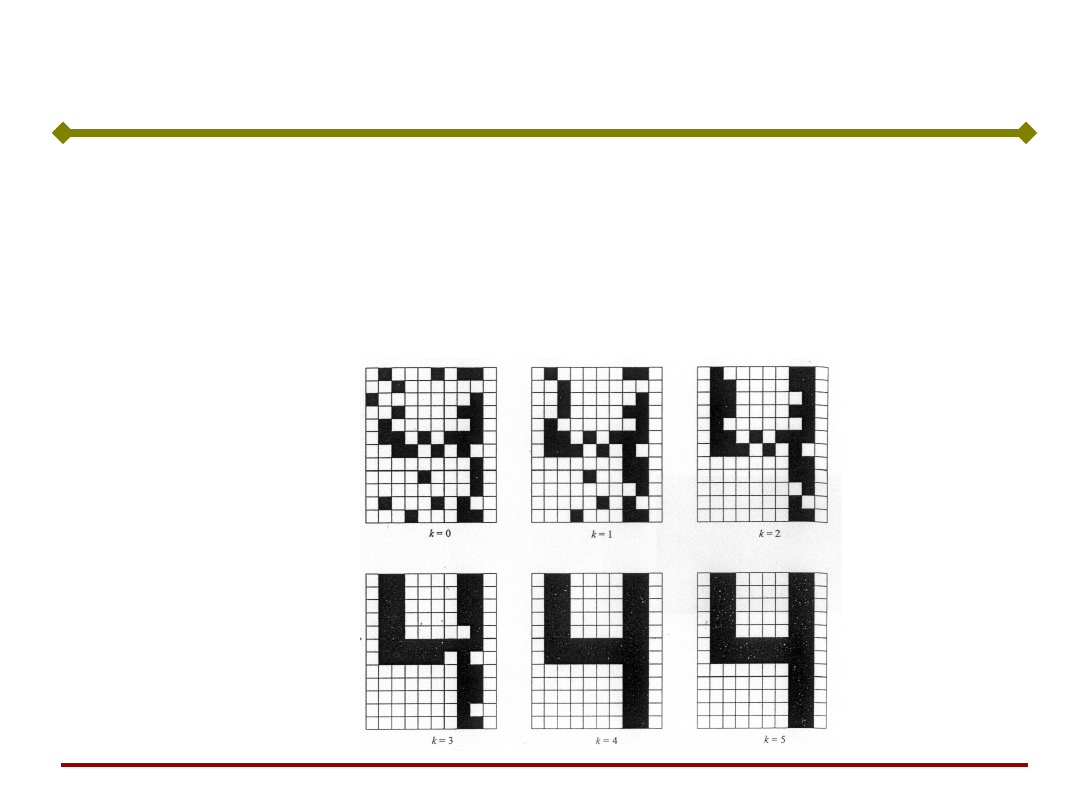
Sieć Hopfielda – przykład
Układ osiągnął stan
stabilny, który jest
komplementarny do
zapamiętanego obrazu s
(2)
Przy innej kolejności
aktualizowania
neuronów, moglibyśmy
osiągnąć wzorzec.
(bo stan początkowy nie
był podobny do żadnego
wzorca – odległość
Hamminga do wzorców
wynosiła 2, czyli 50%)
Stosunek liczby zapamiętanych obrazów do liczby neuronów
p/n = ½
- pamięć była przeładowana
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Tyle na dzisiaj
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Przy prezentacji jednego wzorca uczącego x proces
zmian przebiega dopóty, dopóki zależność (1) nie jest
spełniona dla wszystkich N neuronów. Warunek ten
będzie automatycznie spełniony przy wyborze wag
spełniających relację:
j
i
ij
x
x
N
W
1
Wówczas
N
j
i
j
j
i
x
x
x
x
N
1
)
(
1
Ponieważ wartości bipolarnych elementów wektora x,
spełnione jest zawsze
1
)
1
(
2
2
j
x
Uczenie sieci Hopfielda
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Przy prezentacji wielu wzorców uczących x
(k)
dla
k=1,2,...p wagi W
ij
są dobierane według uogólnionej
reguły Hebba, zgodnie z którą:
)
(
1
)
(
1
k
j
p
k
k
i
ij
x
x
N
W
Przy takim trybie uczenia wagi przyjmują wartości
uśrednione wielu próbek uczących.
Uczenie sieci Hopfielda
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Na starcie y
0
= x, a następnie proces iteracyjny
powtarza się dla kolejnych wartości y
i
aż do ustalenia
się odpowiedzi.
Proces iteracyjny (rekurencyjny) ustalania się
odpowiedzi sieci trwa zwykle wiele cykli i zajmuje dużo
czasu.
W trybie odtworzeniowym na wejście sieci podaje się
wektor testowy x i oblicza odpowiedź sieci w postaci:
€
y
k+1
=sgn(Wy
k
)
Sieci Hopfielda – tryb odtworzeniowy
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Podczas odczytu pamięć może odtworzyć oczekiwany
wzorzec, wzorzec inny niż oczekiwany lub wektor nie
należący do zbioru zapamiętanych wzorców.
Podstawowym zadaniem pamięci asocjacyjnej jest
zapamiętanie zbioru próbek wejściowych (uczących) w
taki sposób, aby przy prezentacji nowej próbki układ
mógł wygenerować odpowiedź, która dotyczyć będzie
jednej z zapamiętanych wcześniej próbek, położonej
najbliżej próbki testującej.
Najczęściej używaną miarą odległości między zbiorami
jest miara Hamminga.
Pamięć asocjacyjna, c.d.
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Rekurencja zaczyna się od stanu y
0
wymuszonego
sygnałem inicjującym. W pierwszym kroku, dla k = 1,
oblicza się y
i
1
, przy czym wskaźnik i wybierany jest
przypadkowo. Obliczenia dla pozostałych
składowych, również wybieranych losowo, prowadzi
się z wykorzystaniem składowych wektora y już
zaktualizowanych w tym kroku, uzyskując ostatecznie
y
1.
Dla ilustracji graficznej przedstawmy wektor
wyjściowy w przestrzeni E
n
. Jest on tam
reprezentowany przez jeden z wierzchołków n-
wymiarowego hipersześcianu [-1,1]
n
. Podczas
rekurencji, przebiegającej asynchronicznie, wektor y
przesuwa się od wierzchołka do wierzchołka, aż
wreszcie stabilizuje się w jednym z 2
n
możliwych
wierzchołków. Stan końcowy y
k
, gdy k ,
uzależniony jest od wag, progów, stanu początkowego
i kolejności aktualizacji składowych y
i
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Inne sieci
•sieci Hamminga
•Sieci RBF
•Sieci Bayesa
•Sieci probabilistyczne PNN,
GRNN
•Itp.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Linia opóźniająca
- Dynamiczne Sieci Jednokierunkowe
- Slide 6
- Sieci Rekurencyjne
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Na skutek istnienia sprzężeń zwrotnych w sieciach rekurencyjnych pojawiają się dynamiczne procesy przejściowe, nieznane w innych rodzajach sieci.
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Z atraktorami w sieci Hopfielda można związać pewne informacje.
- Pamięć asocjacyjna
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
- Slide 61
- Slide 62
- Slide 63
- Slide 64
- Slide 65
- Slide 66
- Slide 67
- Slide 68
- Slide 69
- Slide 70
- Slide 71
- Slide 72
- Slide 73
- Slide 74
- Slide 75
- Slide 76
- Slide 77
- Slide 78
Wyszukiwarka
Podobne podstrony:
PSI 2011 12 w 3 SSN 2
PSI 2011 12 w 9 SE 1
PSI 2011 12 w 10 SE 2
PSI 2011 12 w 8 Model i Metamodel
PSI 2011 12 w 2 SSN 1
PSI 2011 12 w 1 wstep
PSI 2011 12 w 6 SSN SOM
PSI 2011 12 w 3 bis SSN 2
PSI 2011 12 w 5 SSN 4
PSI 2011 12 w 4 SSN 3
K1 2011 12 zad 2
1 MSL temat 2011 12 zaoczneid 1 Nieznany
więcej podobnych podstron